Negative v - Eastern Mediterranean...
65
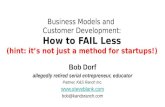
X(v) R(v) Negative v 1 v v Positive v v v 1 v 0 45 G Dorf/Bishop Modern Control Systems 9/E © 2001 by Prentice Hall, Upper Saddle River, NJ. FIGURE 8.3 Polar plot for RC filter.
Transcript of Negative v - Eastern Mediterranean...

X(v)
R(v)
Negative v
1v � ��
v � �
Positive vv � v1
v � 045�
�G �
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.3
Polar plot for RC filter.

Increasing v
Positive v
v � �
Im[G]
Re[G]
v � 0
12t
v �
1t
v � 135�
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.4
Polar plot for G( jv) � K/jv( jvt � 1). Note that v � � at the origin.

jv
jv1( jv1 � p)
s
v � v1
s � �1t
� �p
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.5
Two vectors on the s-plane to evaluate G( jv1).

(a)
�5
�10
�15
0
�20
20 lo
g�G
(jv
)�, d
B
(b)
�50�
0�
�100�
f(v
), d
egre
es
v, rad/sec
0.1t
10t
1t
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.6
Bode diagram for G( jv) � 1/( jvt � 1): (a) magnitude plot and (b) phase plot.

0
�20
�10
v
20 lo
g�G
� , dB
1t
110t
10t
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.7
Asymptotic curve for ( jvt � 1)�1.

dB 0
v v
40
�40
( jv)2
( jv)�2( jv)�1
( jv)
( jv)2
( jv)0
( jv)�1
( jv)�2
( jv)f
(v),
deg
rees
180
90
0
�90
�1800.1 1 10 100 0.1 1 10 100
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.8
Bode diagram for ( jv)�N.

0
�45
�90
10
0
�10
�20
0.1t
10t
1t
dBf
(v),
deg
rees
v
Exactcurve
Asymptoticcurve
Linearapproximation
Exact
(a)
(b)
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.9
Bode diagram for (1 � jvt)�1.

0
�20
�40
�60
�80
�100
�120
�140
�160
�180
u � v /vn � Frequency ratio
Phas
e an
gle,
deg
rees
1.00.4 0.5 0.6 0.80.30.20.1 104 5 6 832
20
10
0
�10
�20
�30
�40
20 lo
g�G
�
(b)
u � v /vn � Frequency ratio
1.00.4 0.5 0.6 0.80.30.20.1 104 5 6 832
(a)
z � 0.050.100.150.200.25
0.3 0.4 0.50.6
0.81.0
z � 0.050.100.150.200.25
0.3 0.40.5
0.60.8
1.0
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.10
Bode diagram for G( jv) � [1 � (2z/vn) jv � ( jv /vn)2]�1.

z
0.20 0.30 0.40 0.50 0.60 0.70
3.25
3.0
2.75
2.5
2.25
2.0
1.75
1.5
1.25
1.0
0.90
0.80
0.70
0.60
0.50
0.40
0.30
0.20
0.101.0
Mpv
Mpvvr /vn
vr /vn
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.11
The maximum of the frequency response, Mpv, and the resonant
frequency, vr, versus z for a pair of complex conjugate poles.

(a)
0 0
0 0
(b)
(c) (d)
s1( jv � s1)
s1*
s1
( jv � s1)*
s1*
M1
u1
*u1
M1*
j0
s1*
s1
M1
M1
u1
s
u1
M1*
M1*
u1*
u1*
jvr
jvd
jv
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.12
Vector evaluation of the frequency response for selected values of v.

1.5
1.0
0.5
0.00 vr vd
90�
0�
�90�
�180�
f(v)
v
�G �
Mpv
�G�
f(v)
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.12
Vector evaluation of the frequency response for selected values of v.

v
40
20
0
�20
�40
dB20 log K
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.3
Asymptotic Curves for Basic Terms of a Transfer Function.

v
90�
45�
0�
�45�
�90�
f (v)
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.3
Asymptotic Curves for Basic Terms of a Transfer Function (continued).

v
0.1v1 v1 10v1
40
20
0
�20
�40
dB
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.3
Asymptotic Curves for Basic Terms of a Transfer Function (continued).

v
0.1v1 v1 10v1
90�
45�
0�
�45�
�90�
f (v)
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.3
Asymptotic Curves for Basic Terms of a Transfer Function (continued).

v
0.1v1 v1 10v1
40
20
0
�20
�40
dB
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.3
Asymptotic Curves for Basic Terms of a Transfer Function (continued).

v
0.1v1 v1 10v1
90�
45�
0�
�45�
�90�
f (v)
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.3
Asymptotic Curves for Basic Terms of a Transfer Function (continued).

v
0.1 10 10010.01
40
20
0
�20
�40
dB
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.3
Asymptotic Curves for Basic Terms of a Transfer Function (continued).

0.1 10 10010.01
v
90�
45�
0�
�45�
�90�
f (v)
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.3
Asymptotic Curves for Basic Terms of a Transfer Function (continued).

u0.1 10 10010.01
40
20
0
�20
�40
dB
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.3
Asymptotic Curves for Basic Terms of a Transfer Function (continued).

0.1 10 10010.01u
180�
90�
0�
�90�
�180�
f (v)
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.3
Asymptotic Curves for Basic Terms of a Transfer Function (continued).

(a) (b)
jv1
�p�z
jv1
�p �z
u1u2
0 0G1(s) G2(s)
u2u1
*
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.16
Pole–zero patterns giving the same amplitude response and different phase characteristics.

180�
90�
0�
vz p
Nonminimum phase
Minimumphase
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.17
The phase characteristics for the minimum phase andnonminimum phase transfer function.

� �
� �
R
Cv in vo
R
C
L L
vn
�G �
f(v)
(b)(a)
(c)
0
1
�180�
0�
�360�v
v
jv1
u1 u2
u1* u2
*
p1
*p1
0
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.18
The all-pass network (a) pole–zero pattern,and (b) frequency response, and (c) a lattice network.

21
1
2
3
4
5
0.1 0.2 10 50 100
20
0
10
14
�10
�20
20 lo
g � G
� , dB
v
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.19
Magnitude asymptotes of poles and zeros used in the example.

10.1 10 100
20
0
�20
�40
10
�10
�30
�50
�20 dB/dec
�40 dB/dec
�20 dB/dec
�60 dB/dec
Approximate curve
Exact curvedB
v
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.20
Magnitude characteristic.

90
60
30
0
�30
�60
�90
�120
�150
�180
�210
�240
�2700.1 0.2 1.0 2.0 10 60 100
Zero at v � 10
Pole at v � 2
Complex poles
Pole at origin
Approximate f(v)
f
v
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.21
Phase characteristic.

Max. mag � 33.96906 dBMax. phase � �92.35844 degThe gain is 2500
Min. mag � �112.0231 dBMin. phase � �268.7353 deg
0 dB
�180 deg
dBand
phase Mag:Phase:
0.1 1 10 100 1000Frequency, rad/s
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.22
The Bode plot of the G( jv) of Eq. (8.42).

Phas
e (d
egre
es)
0
�3
�10
�20
�20
�40
�60
�45
�30
10 100 1,000 10,000 100,000
v � 300 v � 20,000
v � 20,000
v � 300 v � 2,450
�20 dB/dec
dB
v � 2,450
v
(a)
(b)
60
40
20
0
�45�
10 100 1,000 10,000 100,000v
10 dB
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.23
A Bode diagram for a system with an unidentified transfer function.

�
Y(s)R(s)�
s (s � 2zvn)
v2n
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.24
A second-order closed-loop system.

v
0
20 log Mpv
20 lo
g � T
� , dB
�3
0 vr vB
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.25
Magnitude characteristic of the second-order system.

1.6
1.5
1.4
1.3
1.2
1.1
1
0.9
0.8
0.7
0.60.1 0.2 0.3 0.4 0.5 0.6
vn
vB
0.7 0.8 0.9 1
vn
vB
Linear approximation
� �1.19z � 1.85
z
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.26
Normalized bandwidth, vB /vn, versus z for a second-order system (Eq. 8.46). Thelinear approximation vB /vn � �1.19z� 1.85 is accurate for 0.3 � z� 0.8.

40
30
20
10
0
�10
�20
�30
�40�270 �225 �180 �135 �90
Phase, degrees
20 l
og � G
H� ,
dB
0.1
0.3
0.6
1.0
2
3.6
5
7
10
v
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.27
Log-magnitude–phase curve for GH1( jv).

40
30
20
10
0
�10
�20
�30
�40�270 �225 �180 �135 �90
Phase, degrees
20 lo
g � G
H� ,
dB
v
0.1
0.2
0.5
1.0
3
13
2040
51
61
70
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.28
Log-magnitude–phase curve for GH2( jv).

(b)
(a)
�
�
Controller
R(s)Y(s)
Position onx-axis
Motor, screw, andscribe holder
K1
s (s � 1)(s � 2)
x-motor 2
Metal to beengraved
z-axis
y-axisScribe
x-axis
x-motor 1 Position measurement
Desired position
Position measurement
Controller
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.29
(a) Engraving machine control system. (b) Block diagram model.

20 lo
g �G
�, dB
10
0
�10
�20
0.1 0.2 0.5 21 5 10
�135�
�180�
�90�
v
20
f(v
)
Asymptotic approximation
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.30
Bode diagram for G(jv).

10
v
20 lo
g � T
� , dB
5
0
�5
�10
�15
0�
�90�
�180�
f(v
)
0.1 0.2 0.4 0.6 0.8 1 2�270�
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.31
Bode diagram for closed-loop system.

50
0
-50
-100
-150
10-1 100 101 102 103
Gai
n dB
Pha
se d
eg
Frequency (rad/sec)
10-1 100 101 102 103
Frequency (rad/sec)
-50
-100
-150
-200
-250
-300
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.32
The Bode plot associated with Eq. (8.59).

10110-1 100 102 103
Pha
se d
egG
ain
dB
Frequency (rad/sec)
20
0
-20
0
-100
-200
G(s) � sys
[mag,phase,w]=bode(sys,w)
User-supplied frequency(optional)
10110-1 100 102 103
Frequency (rad/sec)
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.33
The bode function, given G(s).

10-1 100 101 102 103
Logarithmically spaced vector
w=logspace(a,b,n)
>>w=logspace(-1,3,200);>>bode(sys,w);
Mag
nitu
de (
dB)
Frequency (rad/sec)
-100
50
0
-50
-150
Generate 200 points between 0.1 and 1000.
n points between 10a and 10b
Example
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.34
The logspace function.

% Bode plot script for Figure 8.22%num=5*[0.1 1];f1=[1 0]; f2=[0.5 1]; f3=[1/2500 .6/50 1];den=conv(f1,conv(f2,f3));%sys=tf(num,den);bode(sys)
1
502
0.650
s(1 � 0.5s)(1 � s � s2)
Compute
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.35
The script for the Bode diagram in Fig. 8.32.

State-space modelsys � ss(A, B, C, D)
bode(sys)
bode(sys)
Transfer function modelsys � tf(num,den)
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.36
The bode function with a state variable model.

Mpv
z
(b)
(a)
zeta ranges from 0.15 to 0.70zeta=[0.15:0.01:0.7];wr_over_wn=sqrt(1-2*zeta.^2);Mp=(2*zeta .* sqrt(1-zeta.^2)).^(-1);%subplot(211),plot(zeta,Mp),gridxlabel(' \zeta'), ylabel('M_{p\omega}')subplot(212),plot(zeta,wr_over_wn),gridxlabel(' \zeta'), ylabel(' \omega_r/ \omega_n')
Generate plots
0 0.2 0.4 0.6 0.8
z
0 0.2 0.4 0.6 0.80
0.20.40.60.8
1
11.5
22.5
33.5
vr/
vn
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.37
(a) The relationship between (Mpv, vr ) and (z, vn ) for
a second-order system. (b) MATLAB script.

Initial gainK
UpdateK
Compute closed-looptransfer function
Ks(s � 1)(s � 2) � K
T(s) �
Checktime domain specs:
If satisfied, then exitand
continue analysis.
4zvn
Ts � ,
Mp � 1 � e�zp /�1 � z 2
Closed-loop Bode diagram
20*l
og10
(mag
) [d
B]
Determine vn and z.
Mpv
102100
10
0
�10
�20
�30
�40vr
Freq. [rad/sec]
z
0 0.2 0.4 0.6 0.8
z
0 0.2 0.4 0.6 0.8
Mpvvr /vn
3.5
3
2.5
2
1
1.5
1
0.8
0.6
0.4
0.2
0
Determine Mpv and vr.
Establish relationship between frequency domainspecs and time domain specs.
.
.
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.38
Frequency design functional block diagram for the engraving machine.

Check specs and iterate, if necessary.
engrave1.m
num=[K]; den=[1 3 2 K];sys=tf(num,den);w=logspace(-1,1,400);[mag,phase,w]=bode(sys,w);[mp,l]=max(mag);wr=w(l);mp,wr
>>K=2; engrave1mp = 1.8371wr = 0.8171>>>>>>>>zeta=0.29; wn=0.88; engrave2ts = 15.6740po = 38.5979
ts=4/zeta/wnpo=100*exp(-zeta*pi/sqrt(1-zeta^2))
engrave2.m
Closed-loop transfer function
Closed-loop Bode diagram
Determine vn and z from Fig. 8.11using Mpv
and vr.manual step
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.39
Script for the design of an engraving machine.

y(t
)
Time (sec)
engraves.m
K=2; num=[K]; den=[1 3 2 K]; sys=tf(num,den);t=[0:0.01:20];step(sys,t)xlabel('Time (sec)'), ylabel('y(t)')
0 2 4 6 8 10 12 14 16 18 200
0.2
0.4
0.6
0.8
1
1.2
1.4
Settling time
(b)
(a)
Percent overshoot � 37%
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.40
(a) Engraving machine step response for K � 2. (b) MATLAB script.

Springk
Mass M
y(t)
Arm forceu(t)
Frictionb
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.41
Spring, mass, friction model of flexure and head.

�
�R(s) Y(s)
PD control Motor coil
5
(t1s � 1)
t1 � 10�3 t2 � 1/20
Gc(s) � K(s � 1) G1(s) �
Arm
0.05
s(t2s � 1)G2(s) �
Flexure and head
1
[1 � (2z /vn)s � (s/vn)2]
z � 0.3, vn � 18.85 103
G3(s) �
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.42
Disk drive head position control, including effect of flexure head mount.

dB
60
40
20
0
�20
�40
�60
�800.1 1 10 102 103 104 105
v1 � 1000
Sketch of actual curve
Asymptotic approximation
–20 dB/dec
–40 dB/dec
�80 dB/dec
vnv2 � 20vz � 1v
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.43
Sketch of the Bode diagram magnitude for the system of Fig. 8.42.

Frequency, (rad/sec)
(a)
(b)
Frequency (rad/sec)
Mag
nitu
de (
dB)
0
�20
�3
�40
�60
�80
�100
�120
20
�50
�100
�150
100
50
0
10�1 100 101 102 103 104 105
10�1 100 101 102 103 104 105
Mag
nitu
de (
dB)
vB
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
FIGURE 8.44
The magnitude Bode plot for (a) the open-loop transfer function and (b) the closed-loop system.

0�
�90�
�180�
f M0 dB/dec
�20 dB/dec
0 dB
KdB
log v
�45�
1t1
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.5
Bode Diagram Plots for Typical Transfer Function

�40 dB/dec
0 dB log v1t1
1t2
0�
�180�
f
f
0
�20
M
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.5
Bode Diagram Plots for Typical Transfer Function (continued).

�60 dB/dec
�40 dB/dec0 dB log v1
t1
1t2
1t3
f0�
�180�
�270�
f M
0�20
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.5
Bode Diagram Plots for Typical Transfer Function (continued).

0 dB
�20 dB/dec
log v
f M
�90�
�180�
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.5
Bode Diagram Plots for Typical Transfer Function (continued).

�90�
�180�
f M�20 dB/dec
0 dB log v1t1
�40 dB/dec
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.5
Bode Diagram Plots for Typical Transfer Function (continued).

�180�
�270�
�90�
f M
0 dB
�60 dB/dec
1t1
�
�20
log v
1/t2
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.5
Bode Diagram Plots for Typical Transfer Function (continued).

�180�
�90�
f M
0 dB log v
�40 dB/dec
�20 dB/dec
1t1
1ta
1/t2
�20
�40f
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.5
Bode Diagram Plots for Typical Transfer Function (continued).

�180�
f M
0 dB log v
�40 dB/dec
f
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.5
Bode Diagram Plots for Typical Transfer Function (continued).

�180�
�270�
f M
0 dB
�60 dB/dec
log v
�40 dB/dec
f
1t1
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.5
Bode Diagram Plots for Typical Transfer Function (continued).

�180�
f M
0 dB log v
�40 dB/dec
�40 dB/dec
f
�20 dB/dec
1ta
1/t1
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.5
Bode Diagram Plots for Typical Transfer Function (continued).

�180�
�270�
f M
0 dB
�60 dB/dec
log v
f
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.5
Bode Diagram Plots for Typical Transfer Function (continued).

�180�
�270�
f M
0 dB
�60 dB/dec
log v
�40 dB/dec
f
1/ta
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.5
Bode Diagram Plots for Typical Transfer Function (continued).

�180�
�90�
�270�
f M
0 dB
�60 dB/dec
log v
�40 dB/dec
f
�20 dB/dec
1ta
1tb
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.5
Bode Diagram Plots for Typical Transfer Function (continued).

�180�
�90�
�270�
f M
0 dB
logv
1ta
1tb
1t1
1t2
1t3
1t4�40
�60
�20
�40
�20
�40
�60
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.5
Bode Diagram Plots for Typical Transfer Function (continued).

�180�
f M
0 dB 1ta
1t1
1t2
�40
�20
�40
�60
log v
Dorf/BishopModern Control Systems 9/E
© 2001 by Prentice Hall, Upper Saddle River, NJ.
Table 8.5
Bode Diagram Plots for Typical Transfer Function (continued).