Nathan Abraham Master’s Speaking Requirement August 6 th,2004.
40
Nathan Abraham Master’s Speaking Requirement August 6 th ,2004
-
date post
20-Dec-2015 -
Category
Documents
-
view
217 -
download
1
Transcript of Nathan Abraham Master’s Speaking Requirement August 6 th,2004.

Nathan Abraham
Master’s Speaking Requirement
August 6th,2004


Operating room of the past and Present
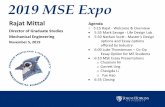
Rembrandt, The Anatomy Lesson, 1632 Jaramaz “MIS tools” 2003DiGioia (recently…)
Integration
Planners/Simulators
Biologic Implants
AugmentedRealityDisplays
Semi-active Robots
ActiveRobots
OR HCI
Robust andAccurate Tracking

Why Medical Robotics
• Improves surgeon precision and dexterity.
• Reduces motion and trembling.• Provides high repeatability.• Enables online force-control.• Reduces radiation exposure during
operation.• Enables percutaneous procedures. - Reduce patient pain and trauma. - Shorten hospital stays.

Categorization of Medical Robotics System
Robotics system Passive Semi-Active Active
Source of information systems
3D (CT, MRI) HipNavVectorVisionSurgiGATENavitrackSurgetics
AcrobotPFS
ROBODOC
2½ (Fluoro) SurgiGATEStealthStation VectorVisionSurgetics
CASPARCRIGOS
Image-free OrthopilotVectorVisionSurgeticsStryker
PiGalileo MBARS

Available Robotic Systems
• Integrated Surgical Systems• Robodoc® - Total hip replacement.• OrthoDoc® - Preoperative planning
workstation. • NeuroMateTM - Neurosurgeries (Parkinson).• Caspar - Orthopaeidic• da Vinci ® - MIS procedures

Available Robotic Systems: Precision Freehand Sculptor
PFS Tool
Position Tracking Device
Surgical plan with updates
Bone
Tracking Marker
Tracking Marker

Available Robotic Systems• Computermotion
ZEUS® - Minimally invasive procedures.

Available Robotic Systems• URSortho
CASPAR® -Bone and joint surgery.Evolution 1 + Hexapod Z ® - 10 micrometers resolution.

Major Components in a Medical Robotics Systems
Pre/Intra-operative Planning
Intraoperative robotic system
Post-operative Evaluation


Image Free SystemImage Free System
Cloud of points and Tracking the trochlear groove
Haptic device
Intra-operative planning and bone shaping
Why did we choose a parallel robot

Serial Robot
Base link
Active joints
Kinematic chain
Output link
Serial Manipulator
Base link
Close kinematicchain
Output link
Parallel Manipulator
Parallel Robot

Serial Vs. Parallel Robots
Character Serial Robot
Parallel Manipulator
Links Open Chain Close Chains
Workspace Large Small
Singularity Lose of DOF Gain uncontrollable DOF
Structure Stiffness
Low High
Load/weight ratio Small High
Accuracy Low Very high
Time respond Low High

Parameter Search

Parallel Robot
3DOF
6DOF

The application

What is it?•A parallel mechanism to be placed directly on to a patient’s knee during patellofemoral joint replacement surgery (knee surgery).
•Computer control will perform a portion of the bone milling process
•CNC machine for surgeons
Why is it?•Over 400,000 estimated knee arthroplasty procedures in the U.S. by 2030
•Invasive methods require longer healing times: more cost and discomfort to the patient
•Glorified carpentry

How your Knee Works

How your Knee Works


Current Technique
1. Surgeon traces (by hand & marker) template on to PF-surface
2. Burr/chisle used to resect the trochlear groove
3. Template is tried on knee; repeat 2 if necessary
4. Secure final implant

Our Technique1. Attach MBARS to the patients knee (making
the knee and robot a rigid body to eliminate relative motion).
2. Construct a CAD model of the patient’s knee
3. Choose from a library of implant CAD models
4. Find the model with the best fit and position on knee
5. Generate a trajectory for MBARS to follow and cover the required parts of the knee to be milled

•.sur file (points & triangles) built from CT imagery
•Can be done pre-operatively, but not covered under all insurance packages
•6 DOF force sensor
•Will be used as another appendage for MBARS to gather points and build model during surgery
Knee Model

Implant Model
•No time/money restraints
•All sizes can be preoperatively computed using CT

Fitting the Implant to the Knee
•Surgeon manually marks the trochlear groove on implant and knee model
Aligning the implant with the trochlear grove.
•Distal tip is translated to contact with knee model

Exhaustive Orientation Search

Result:

Path Generation
•Once implant is fitted to knee, find a trajectory to cover the surface needed to be milled
UniformityComplete Coverage

Sweep Line Method
•Pick an arbitrary* line and direction perpendicular to line to “sweep” line across knee surface
•Move the sweepline in equal size increments along the gradient in the chosen direction

Stuff will go here about mapping from surface to xy E R2

Final Trajectory

Cell Decomposition

Trajectory on Knee

Point to Point Navigation using Potential Fields
Local navigation of burr tip determined by the sum of 2 fictitious forces:
Forceattract
points from current burr position to target location
Forcegravity / Forcerepulse
Pulls the burr to the pattellofemoral surface if outside a set threshold
-OR-
normal force to push the burr away if within the set threshold
Following a trajectory of 100 set points. Burr locations shown in red, knee surface polygons shown in green

Simulated Gravity Example
Right figure shows the effects of choosing different gravitational constants. Smaller ones (shown by top trajectories) provide smoother paths but are not constrained tightly enough to travel along the surface.
4th order polynomial approximation of the patellofemoral surface. Has the general shape of a saddle function.
How a typical trajectory is formed. Repulsive forces in red, attractive forces in green, and gravitational forces in blue. Gravitational threshold distance shown as black dotted line.

End Result
•Alignment error is minimized computationally rather than visually
•Template step in the PFJ procedure is no longer necessary
•One time milling process instead of iterative procedure.