Mustafa Seminar
28
MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105 Page | 1 A SEMINAR ON ‘MAGNETIC BEARINGS’ SUBMITTED BY:- MUSTAFA TAJKHAN T.E (MECHANICAL) ROLL NO.:-380 UNDER THE GUIDENCE OF Prof Ms. M. M. Charde DEPARTMENT OF MECHANICAL ENGINEERING MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING, ALANDI, PUNE-412105 ACADEMIC YEAR:-2011-2012 MAEER’S
-
Upload
mustafa-tajkhan -
Category
Documents
-
view
171 -
download
2
Transcript of Mustafa Seminar

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 1
A SEMINAR ON
‘MAGNETIC BEARINGS’
SUBMITTED BY:-
MUSTAFA TAJKHAN
T.E (MECHANICAL)
ROLL NO.:-380
UNDER THE GUIDENCE OF
Prof Ms. M. M. Charde
DEPARTMENT OF MECHANICAL ENGINEERING
MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,
ALANDI, PUNE-412105
ACADEMIC YEAR:-2011-2012
MAEER’S

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 2
MAHARASHTRA ACADEMY OF ENGINEERING,
ALANDI, PUNE-412105
CERTIFICATE
This is to certify that, MUSTAFA TAJKHAN (ROLL No. 380) of T.E.
MECHANICAL has delivered a seminar on “MAGNETIC BEARINGS” for
partial fulfillment of T.E. Mechanical course of University of Pune for the
academic year: 2011-2011
SEMINAR GUIDE H.O.D (MECHANICAL)
Prof Ms. M. M. CHARDE PROF.N. B. MURALI
ACKNOWLEDGEMENT

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 3
It gives me great pleasure to present a seminar report on “MAGNETIC BEARING”. In
preparing this paper number of hands helped me directly or indirectly. Therefore it becomes
my duty to express my gratitude towards them.
I am very much obliged to subject guide Prof Ms M. M. Charde of Mechanical Engineering
Department, for helping and giving proper guidance. His timely suggestions made it
possible to complete this paper for me.
I will fail in my duty if I won’t acknowledge a great sense of gratitude to our seminar
coordinator PROF.N.B.TOTLA and H.O.D PROF.N.MURLI.
MUSTAFA TAJKHAN
T.E(MECHANICAL)

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 4
CONTENTS-
Chapter TITLE PAGE NO. * List of Figures 5
* List of Tables 5
* Abstract 6
1 Introduction 7
2 History 8
3 Construction of Magnetic Bearing 10
4 Working of Magnetic Bearing 12
5 Types of Magnetic Bearing 13
6 Load 15
7 Speed 19
8 Losses 23
9 Advantages 24
10 Disadvantages 24
11 Applications 24
12 Conclusion 25
13 Reference 26
LIST OF FIGURES

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 5
FIGURE DESCRIPTION PAGE
Figure 1 A Magnetic Bearing 7
Figure 2 Construction of Magnetic Bearings 11
Figure 3 Magnetic bearing working 12
Figure 4 Passive Magnetic Bearing 13
Figure 5 Active Magnetic Bearing 14
Figure 6 Basic set-up of an active magnetic bearing carrying a rotor load 15 Figure 7 B-H Diagram, Hysteresis loop and Saturation 16
Figure 8 Force on Magnet and Geometry of Radial bearing 17
Figure 9 Centrifugal loads acting on the volume element of a rotor 20
Figure 10 Tangential stress distribution for a disc with and without hole in the
centre
21
Figure 11 Example of a broken rotor 22
LIST OF TABLES
TABLE DESCRIPTION PAGE
Table 1 Early U.S. Patents in AMB 10
Table 2 Achievable circumferential speed for a full disc 21
ABSTRACT
A bearing is a machine element, which supports another moving machine element. It
permits relative motion between the contact surfaces of the members, while carrying load.

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 6
Due to relative motion, friction occurs and rubbing surface wears rapidly. To prevent this a
lubricant may be used.
A question comes in mind whether it is possible to support a journal without any physical
contact so that there is no wear. Is there a force, which can exerted even if there is no
contact between two-surfaces. Magnetic force allows such property and thus the idea of
magnetic bearing was visualized.
Already in 1842 Earnshaw had demonstrated that passive (permanent) could made but it
cannot stable in all spatial direction. For successful operation the unstable direction have to
be electrically served. Hence the name ACTIVE MAGNETIC BEARING.
1. INTRODUCTION

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 7
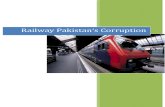
A magnetic bearing is
a bearing which supports a
load using magnetic levitation.
Magnetic bearings support
moving machinery without
physical contact, for example,
they can levitate a rotating
shaft and permit relative
motion with very low friction
and no mechanical wear. They
are in service in such industrial
applications as electric power generation, petroleum refining, machine tool operation and
natural gas pipelines. They are also used in the Zippe-type centrifuge used for uranium
enrichment. Magnetic bearings are used in turbomolecular pumps where oil-lubricated
bearings are a source of contamination. Magnetic bearings support the highest speeds of any
kind of bearing; they have no known maximum relative speed.
It is difficult to build a magnetic bearing using permanent magnets due to the limitations described by Earnshaw's theorem, and techniques using diamagnetic materials are relatively undeveloped. As a result, most magnetic bearings require continuous power input and an active control system to hold the load stable. Many bearings can use permanent magnets to carry the static load, and then only use power when the levitated object deviates from its optimum position. Magnetic bearings also typically require some kind of back-up bearing in case of power or control system failure and during initial start-up conditions.
Two sorts of instabilities are very typically present with magnetic bearings. Firstly, attractive magnets give an unstable static force that decreases with greater distance and increases at close distances. Secondly since magnetism is a conservative force, in and of itself it gives little if any damping and oscillations may cause loss of successful suspension if any driving forces are present, which they very typically are.
With the use of an induction-based levitation system present in maglev technologies such as
the Inductrack system, magnetic bearings could do away with complex control systems by
Figure 1: A Magnetic Bearing

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 8
using Halbach Arrays and simple closed loop coils. These systems gain in simplicity, but are
less advantageous when it comes to eddy current losses. For rotating systems it is possible to
use homopolar magnet designs instead of multipole halbach structures, which reduces losses
considerably
2. HISTORY
The evolution of active magnetic bearings may be traced through the patents issued in this field. The table below lists several early patents for active magnetic bearings. Earlier patents for magnetic suspensions can be found but are excluded here because they consist of assemblies of permanent magnets of problematic stability per Earnshaw's Theorem.
Early active magnetic bearing patents were assigned to Jesse Beams at the University of Virginia during World War II and are concerned with ultracentrifuges for purification of the isotopes of various elements for the manufacture of the first nuclear bombs, but the technology did not mature until the advances of solid-state electronics and modern computer-based control technology with the work of Habermann and Schweitzer. Extensive modern work in magnetic bearings has continued at the University of Virginia in the Rotating Machinery and Controls Industrial Research Program. The first international symposium for active magnetic bearing technology was held in 1988 with the founding of the International Society of Magnetic Bearings by Prof. Schweitzer (ETHZ), Prof. Allaire (University of Virginia), and Prof. Okada (Ibaraki University).
In 1987 further improved AMB designs were created in Australia by E.Croot (see reference below as well) but these designs were not manufactured due to expensive costs of production. However, some of those designs have since been used by Japanese electronics companies, they remain a specialty item: where extremely high RPM is required.
Since then there have been nine succeeding symposia. Kasarda reviews the history of AMB in depth. She notes that the first commercial application of AMB’s was with turbo machinery. The AMB allowed the elimination of oil reservoirs on compressors for the NOVA Gas Transmission Ltd. (NGTL) gas pipelines in Alberta, Canada. This reduced the fire hazard allowing a substantial reduction in insurance costs. The success of these magnetic bearing installations led NGTL to pioneer the research and development of a digital magnetic bearing control system as a replacement for the analog control systems supplied by the American company Magnetic Bearings Inc. (MBI). In 1992, NGTL's

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 9
magnetic bearing research group formed the company Revolve Technologies Inc. to commercialize the digital magnetic bearing technology. This firm was later purchased by SKF of Sweden. The French company S2M, founded in 1976, was the first to commercially market AMB’s. Extensive research on magnetic bearings continues at the University of Virginia in the Rotating Machinery and Controls Industrial Research Program.
Starting from 1996 the Dutch oil and gas company NAM installed over a period of 10 years 20 large E-motor driven (with variable speed drive) gas compressors of 23 MW fully equipped with AMB's on both the E-motor and the compressor. These compressors are used in the Groningen gas field to deplete the remaining gas from this large gas field and to increase the field capacity. The motor - compressor design is done by Siemens and the AMB are delivered by Waukesha (owned by Dover). (Originally these bearings were designed by Glacier, this company is later on taken over by Federal Mogul and now part of Waukesha) By using AMB's and a direct drive between motor and compressor (so no the gearbox in between) and applying dry gas seals a full so called dry-dry system (=fully oil free) has been installed. A few of the main advantages by applying AMB's in the driver as well as in the compressor (compared to the traditional configuration with a gearbox, plain bearings and a gasturbine-driver) is a relative simple system with a very wide operating envelope, high efficiencies (particularly at partial load) and also, as done in the Groningen field, to install the full installation outdoors (no large compressor building needed).
Table 1 : Early U.S. Patents in AMB Inventor(s) Year Patent No. Invention Title Beams, Holmes 1941 2,256,937 Suspension of Rotatable Bodies

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 10
Beams 1954 2,691,306 Magnetically Supported Rotating Bodies Beams 1962 3,041,482 Apparatus for Rotating Freely Suspended
Bodies Beams 1965 3,196,694 Magnetic Suspension System Wolf 1967 3,316,032 Poly-Phase Magnetic Suspension Transformer Lyman 1971 3,565,495 Magnetic Suspension Apparatus Habermann 1973 3,731,984 Magnetic Bearing Block Device for Supporting
a Vertical Shaft Adapted for Rotating at High Speed
Habermann, Loyen, Joli, Aubert
1974 3,787,100 Devices Including Rotating Members Supported by Magnetic Bearings
Habermann, Brunet
1977 4,012,083 Magnetic Bearings
Habermann, Brunet, LeClére
1978 4,114,960 Radial Displacement Detector Device for a Magnetic Bearings
3. CONSTRUCTION OF MAGNETIC BEARING
The active magnetic bearing comprises two parts – the mechanical and electronic. The
mechanical parts are similar to electrical motor with a rotor and stator. A core on the stator
is wound with the coil through which the electric current that induces the magnetic field.
This generates the force that supports the shaft. The electronic part of the active magnetic
Even slightest deviation from the desire position will trigger in electronic system to adjust
the current flowing through the electromagnets that determines the strength of the magnetic
field.

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 11
The current are adjust so that desired rotor position is maintained even under varying load
conditions. The magnetic field is dependent on the current flowing through the coils. The
larger the current, the stronger the magnetic field and the load it is able to support. The load
an active magnetic bearing is able to support is very high.
Figure 2: Construction of magnetic bearing

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 12
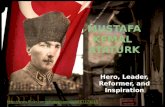
4. WORKING OF MAGANETIC BEARING
Magnetic bearings are basically a system of
bearings which provide non-contact operation,
virtually eliminating friction from rotating
mechanical systems. Magnetic bearing
systems have several components. The
mechanical components consist of the
electromagnets, position sensors and the rotor.
The electronics consist of a set of power
amplifiers that supply current to
electromagnets. A controller works with the
position sensors which provide feedback to control the position of the rotor within the gap.
The position sensor registers a change in position of the shaft (rotor). This change in
position is communicated back to the processor where the signal is processed and the
controller decides what the necessary response should be, then initiates a response to the
amplifier. This response should then increase the magnetic force in the corresponding
Figure 3: Magnetic bearing working

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 13
electromagnet in order to bring the shaft back to center. In a typical system, the radial
clearance can range from 0.5 to 1 mm.
This process repeats itself over and over again. For most applications, the sample rate is
10,000 times per second, or 10 kHz. The sample rate is high because the loop is inherently
unstable. As the rotor gets closer to the magnet, the force increases. The system needs to
continuously adjust the magnetic strength coming from the electromagnets in order to hold
the rotor in the desired position.
5. TYPES OF MAGNETIC BEARINGS
Two basic types of magnetic bearing technologies are present and in use today: Active and
Passive.
1. PASSIVE MAGNETIC BEARINGS
Passive bearings are similar to
mechanical bearings in that no active
control is necessary for operation.
(A five axis passive system is
inherently unstable, and thus a
passive system has at least one active
or mechanical axis of control.)
o One passive bearing approach utilizes repulsive effects of permanent
magnets, which is essentially magnets repelling each other.
o Another is reluctance centering, which is essentially two magnets or
magnetic pole faces attracting to align poles.
Figure 4: PASSIVE MAGNETIC BEARING

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 14
These forces act to cause the rotor to remain in the desired position. This type of
bearing system is suited for very lightly loaded systems, or ones with any significant
load in only one axis and very limited response necessary from the remaining axes.
2. ACTIVE MAGNETIC BEARINGS
AMBs are a very promising technology and are now
being employed for a variety of industrial rotating
machinery applications. These non-contacting bearings
use magnetic forces to firmly
hold the rotor and maintain
separation between it and the
machine’s stationary
components (Schweitzer,
Bleuler, & Traxler, 1994). A
typical magnetic bearing
system consists of two radial
AMBs and an axial AMB that
together constrain 5 degrees
of freedom of the rotor. As
illustrated in Fig. 5, an AMB
consists of an electromagnetic actuator, position sensor,
power amplifiers, and a feedback controller. Each actuator
is composed of ferromagnetic component attached to the
rotor (called the journal for a radial bearing, the thrust disk
for an axial bearing) and opposing pairs of stationary
electromagnets (known as the stator). Radial magnetic
bearing components are typically laminated to increase
actuator bandwidth and reduce losses, while axial bearings are usually not due to the
difficulty of ensuring mechanical integrity in the face of centrifugal loads and the cost of
manufacture.
Figure 5: ACTIVE MAGNETIC BEARING

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 15
6. LOAD
The term load already, as simple as it seems, touches upon basic properties of magnetic
bearings. The load capacity depends on the arrangement and geometry of the
electromagnets, the magnetic properties of the material, of the power electronics, and of
the control laws - a set-up with main elements is shown in Figure 6. Furthermore,
carrying a load is not just a static behaviour – usually it has strong dynamic
requirements. Subsequently, first the static properties of an AMB and the generation of
magnetic forces will be briefly outlined.
Magnetic forces are generated in magnetic fields. Magnetic fields themselves can be
generated by a current, or a permanent magnet. For example, a rotation-symmetrical
magnetic field H is generated around a straight conductor with a constant current i
(Figure 7a). The contour integral around the conductor says that
(1)
This means that the magnitude of the magnetic field in Figure 7a is H = i/2 пr. The
magnetic field is independent of the material around the conductor. If the integration
path encompasses several current loops, as is the case with the air coil in Figure 7b,
then the integral yields
Figure 6: Basic set-up of an active magnetic bearing carrying a rotor

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 16
In magnetic bearing technology electromagnets or permanent magnets cause the
magnetic flux to circulate in a magnetic loop. The magnetic flux Ф can be
visualized by magnetic field lines. Each field line is always closed. The density of
these lines represents the flux density B. The magnetic field H is linked to the flux
density B , ie. magnetic induction, by
B = µ 0 µ r(H)H (2)
Here, µ 0 = 4 x 10 -7 Vs/Am stands for the magnetic field constant of the
vacuum, and µr is the relative permeability depending on the medium the magnetic
field acts upon. µr equals 1 in a vacuum, and Here, μ0 = 4 π 10-7 Vs/Am stands for the
magnetic field constant of the vacuum, and μ r is the relative
Permeability depending on the medium the magnetic field acts upon. μr equals 1 in a
vacuum, also approximately in air. By using ferromagnetic material, where µ r is
generally >>1, the magnetic loop can be concentrated in that core material. The
behavior of ferromagnetic material, is usually visualized in a B-H diagram (Figure 7.3),
showing the well-known phenomena of hysteresis and saturation. Saturation means, as
a consequence, that the flux density B does not increase much more beyond Bsat even
when the magnetic field H and the generating current i is further increased. The current,
corresponding to that saturation limit, be isat.
For deriving the force in an AMB let us consider Figure 8. It shows a single two-pole
magnetic bearing element, aspart of a complete bearing ring of Figure 6, indicating the
path of the magnetic flux Ф.
Figure 7

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 17
.
The usual assumptions hold, i.e. that the iron part lfe in the magnetic loop is neglected,
that the relations for static fields hold as the frequencies for the alternating current are
not too high, that the flux Ф is homogeneous in the iron core and the air gap, and that
the cross-sectional areas are the same Afe = Aa. Then, the induction B = Ba is the same
along the magnetic loop. It is proportional to the current i until the saturation
induction Bsat is reached. A further increase of the current beyond isat does not
increase the induction much further beyond Bsat. The force f exerted can be derived by
considering the energy Wa stored in the air gap between rotor and magnet
(3)
The force acting on the ferromagnetic body is generated by a charge of the field energy
in the air gap, as function of the body position. For small displacements ds the
magnetic flux BaAa remains constant. When the air gap increases by ds the Volume
Va = 2sAa increases, and the energy Wa i n the field increases by dW . This energy
has to be provided mechanically, i.e. an attractive force has to be overcome. Thus
(4)
Figure 8

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 18
In the range, where the induction Ba is proportional to the magnetic field Ha and the
currrent i, i.e. below saturation, the force as a function of coil current i and air gap s for
the arrangement of Figure 8a is
(5)
Equation (1) shows the quadratic dependence of the force on the current and the
inversely quadratic dependence on the air gap. In the case of a real radial bearing
magnet, the force of both magnetic poles affect the rotor with an angle α
(figure 4b), as opposed to the model of the U-shaped magnet of Figure 4a. In the case of
a radial bearing with four pole pairs αequals for instance 22.5 , with cos α = 0.92.
Considering α we obtain
(6)
The force increases with the maximum admissible “magnetomotive force” nimax,
i.e. the product of the maximum current imax and winding number n. This value is
subject to design limitations. As a consequence, the maximum value for the force
depends on the winding cross section, the mean winding length and the possible heat
dissipation, or the available amount of cooling, respectively. Therefore, one limitation
for a high static load is the adequate dissipation of the heat generated by the coil
current due to the Ohm resistance of the windings. This “soft” limitation can be
overcome by a suitable design.
Assuming that this problem has been adequately considered, then the current
imax will eventually reach a value where the flux generated will cause saturation,
and then imax =isat, and the carrying force has reached its maximal value fmax. Any

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 19
overload beyond that physically motivated “hard” limitation of the carrying force
fmax will cause the rotor to break away from its centre position and touch down on its
retainer bearings.
In order to compare the carrying performance of different bearing sizes, the
carrying force is related to the size of the bearing, or more precisely, to the projection
of the bearing area db (Figure 5), leading to the specific carrying force. Let us assume
that the pole shoe width p equals the leg width c. On the bearing diameter d we have
one eighth of the circumference per pole at our disposal. Using half of that for the pole
shoe widthp, the pole shoe surface is given by
Aa = d п 0.5 b (7)
With actually available Si-alloyed transformer sheets, which are used for bearing
magnets, a maximum flux density Bmax ≈ 1.5 Tesla < Bsat is recommended.
( 8 )
Inserting this value for Ba in equation (3), and considering that the forces of both
poles do not act perpendicularly, but at an angle of п/8, we obtain with Aa from
equations (7) and (3) the specific carrying force
Based on this result, an estimation of the carrying force fmax can be determined from
Figure 6. The specific load of
32 N/cm2 (or 0.32 MPa) is considerably lower than that for oil lubricated bearings,
which is about four times as high.
7. SPEED The features characterizing a high-speed rotor can be looked at under various aspects.
The term “high-speed” can refer to the rotational speed, the circumferential speed of the

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 20
rotor in a bearing, the circumferential speed of the rotor at its largest diameter, or the
fact that a rotor is running well above its first critical bending frequency. The
requirements on the AMB and the design limitations can be very different.
7.1 Rotational speed
A record from about 50 years ago are the 300 kHz (!) rotation speed that have been
realized in physical experiments for testing the material strength of small steel balls
(about 1 to 2 mm in diameter) under centrifugal load [3]. In today’s industrial
applications rotational speeds that have been realized are in the range of about 3kHz for
a grinding spindle, or about 5kHz for small turbo-machinery. Problems arise from eddy
current and hysteresis losses in the magnetic material, air losses, and the related
requirements for power generation and adequate heat dissipation if the rotor runs in
vacuum.
7.2 Circumferential speed
The circumferential speed is a measure for the centrifugal load and leads to specific
requirements on design and material. The centrifugal load, Figure 9, leads to tangential
and radial stresses in the rotor, given by
Figure 9: Centrifugal loads acting on the volume element of a rotor

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 21
The tangential stress, as the most critical one, is shown in Figure 10. Highest stress
values occur at the inner boundaries of a rotor disc. As the rotor partially consists of
laminated soft iron sheets, which have to be shrink-fit to the rotor shaft, the tangential
stress at the inner rim is still further increased. Numerous lab experiments have
been performed. Rotor speeds of up to 340 m/s in the bearing area can be reached with
iron sheets from amorphous metal (metallic glass), having good magnetic and
mechanical properties [4]. The theoretical value for the achievable speed vmax lies
much higher. It can be derived from Equation 13 (S is the yield strength, is the
density of the material), and the according values for some materials are given in Table
2.
Figure 10: Tangential stress distribution for a disc with and without hole in the centre
Table 2: Achievable circumferential speed for a full disc

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 22
In industrial applications the speed usually is
limited not by the bearings themselves, but by the
mechanical design of the motor drive. Figure 12
shows the example of a broken rotor. Figure 13
gives a survey on various AMB applications that
have been realized conventionally. For high speeds
permanent magnet synchronous drives are used
where the rotor is wound with carbon fibers,
allowing speeds of about
280 m/s.
7.3 SUPERCRITICAL SPEED
A rotor may well have to pass one or more critical bending speeds in order to reach its
operational rotation speed. In classical rotor dynamics this task is difficult to achieve.
In AMB technology it is the controller that has to be designed carefully to enable stable
and well-damped rotor behaviour. Passing just the first critical elastic speed is state of
the art and can be very well done with AMB. This has been shown even with an
automated controller design, based on self- identification and subsequent self-tuning with
the H∞-method. In many lab experiments two critical speeds have been passed, too,
using various design methods, for example. Three elastic modes have been dealt with
in, using additional notch filters and a zero-pole cancelling filter. It is felt that further
research in developing methods for the design of robust control for highly elastic
systems is necessary.
Figure 11: Example of a rotor

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 23
8. LOSSES
With contact-free rotors there is no friction in the magnetic bearings. The operation of active
magnetic bearings causes much less losses than operating conventional ball or journal
bearings, but, nevertheless, the losses have to be taken into account, and sometimes they
lead to limitations. Losses can be grouped into losses arising in the stationary parts, in the
rotor itself, and losses related to the design of the control.
Losses in the stationary parts of the bearing come mainly from copper losses in the
windings of the stator and from losses in the amplifiers. The copper losses are a heat source,
and, if no sufficient cooling is provided, can limit the control current and hence the maximal
achievable carrying force, as described in section 2.
Losses in the rotor part are more complex and lead to more severe limitations. These losses
comprise iron losses caused by hysteresis and eddy currents, and air drag losses. The losses
heat up the rotor, cause a breaking torque on the rotor, and have to be compensated by the
drive power of the motor.
The iron losses depend on the rotor speed, the material used for the bearing bushes, and the
distribution of flux density
B over the circumference of the bushes. The breaking torque caused by the iron losses
consists of a constant component of hysteresis loss and a component of eddy-current loss,
which grow proportionally to the rotational speed.
The iron losses in the rotor can limit operations, as, in particular in vacuum applications; it
can be difficult to dissipate the generated heat.
The hysteresis losses Ph arise if at re-magnetization the B-H-curve in the diagram of Figure
3 travels along a hysteresis loop. At each loop the energy diminishes by Wh = Vfe ABH.
Here, ABH stands for the area of the hysteresis loop, and Vfe for the volume of the iron.
Consequently, the hysteresis losses are proportional to the frequency of remagnetization
fr. The area of the hysteresis loop depends on the material of the magnet and on the
amplitude of the flux density variation. For iron and flux densities between 0.2 and 1.5 Tesla
the classical relation

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 24
9. ADVANTAGES
1. Contact-free
2. No lubricant
3. No maintenance
4. Tolerable against heat, cold, vacuum, chemicals
5. Low losses
6. Capacity to operate within a wide temperature range
7. Environmentally friendly workplace
8. Very high rotational speeds
10. DISADVANTAGES
1. Larger Bearings.
2. Higher complexity and cost.
3. Requires electrical power.
11. APPLICATIONS
Magnetic bearing advantages include very low and predictable friction, ability to run without lubrication and in a vacuum. Magnetic bearings are increasingly used in industrial machines such as compressors, turbines, pumps, motors and generators. Magnetic bearings are commonly used in watt-hour meters by electric utilities to measure home power consumption. Magnetic bearings are also used in high-precision instruments and to support equipment in a vacuum, for example in flywheel energy storage systems. A flywheel in a vacuum has very low windage losses, but conventional bearings usually fail quickly in a vacuum due to poor lubrication. Magnetic bearings are also used to support maglev trains in order to get low noise and smooth ride by eliminating physical contact surfaces. Disadvantages include high cost, and relatively large size.
A new application of magnetic bearings is their use in artificial hearts. The use of magnetic suspension in ventricular assist devices was pioneered by Prof. Paul Allaire and Prof.

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 25
Houston Wood at the University of Virginia culminating in the first magnetically suspended ventricular assist centrifugal pump (VAD) in 1999.
12. CONCLUSION Limitations in Active Magnetic Bearings arise from two reasons: the state of the actual
technology in design and material, and from basic physical relations. The paper has given a
survey on such limitations, giving a brief theoretical background, showing examples and
pointing to actual data. Further research appears to be indicated in developing insight and
outlook at the boundaries of the field of magnetic bearings. A systematic comparison of
AMB performance with that of classical bearings needs consistent data. The joint operation
of a magnetic bearing with a roller bearing under emergency situations, in load sharing or in
touch down contacts, needs further experiments and design efforts. The operation at
supercritical speeds, passing many elastic rotor and structure frequencies needs more
research on the control design. The advanced information processing within the bearing
system, extending the smartness of the rotating machinery will be a promising research area.
The potential and limitations of high temperature super-conductors, as an extension or an
alternative to AMBs, is not yet suffiently known.

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 26
13. REFRENCES 1. Active magnetic bearings for machining applications
Carl R. Knospe
Department of Mechanical & Aerospace Engineering, University of Virginia,
Charlottesville, VA, USA
Received 22 February 2005; accepted 8 December 2005
Available online 14 February 2006
2. Design and control of active magnetic bearing system with
Lorentz force-type axial actuator
Ha-Yong Kim a, Chong-Won Lee b,*
a Materials and Devices Research Center, HDD Program Team, Samsung Advanced
Institute of Technology, Mt. 14-1, Nongseo-Ri,
Giheung-Eup, Yongin-Si, Gyeonggi-Do 449-712, Republic of Korea
b Center for Noise and Vibration Control (NOVIC), Department of Mechanical
Engineering, Korea Advanced Institute of Science and Technology,
Science Town, Daejeon 305-701, Republic of Korea
Received 3 May 2004; accepted 14 September 2005
3. Linear Magnetic Bearing and Levitation System
for Machine Tools
Prof. Dr.-lng. Dr.-lng. E. h. Manfred Weck, Dipl.-lng. Ulrich Wahner
Laboratory for Machine Tools and Production Engineering,
Aachen University of Technology, Aachen, Germany
Received on January 8,1998
4. Optimal control of the magnetic bearings for a flywheel energy storage system
K.Y. Zhu a,*, Y. Xiao b, Acharya U. Rajendra a
a Department of Electronic and Computer Engineering, Ngee Ann
Polytechnic,Singapore 599489, Singapore
b Servo Dynamics, Seagate Technology International, 63 The Fleming, Science Park
Drive, Singapore 118249, Singapore

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 27
5. Magnetic bearings — a new world opens for design engineers
World Pumps, 0262 1762/03 © 2003 Elsevier Ltd. All rights reserved
6. Calnetix
7. Wikipedia
8. Scribd

MAEER’S MAHARASHTRA ACADEMY OF ENGINEERING,ALANDI, PUNE-412105
Page | 28