MUSCULOSCELETAL EFFICIENCY IN CYCLING AND … · EFFICIENCY IN CYCLING AND HANDCYCLINGAND...
54
MUSCULOSCELETAL EFFICIENCY IN CYCLING AND HANDCYCLING AND HANDCYCLING Dr. Harald Böhm Orthopaedic Hospital for Children Aschau im Chiemgau, Germary
Transcript of MUSCULOSCELETAL EFFICIENCY IN CYCLING AND … · EFFICIENCY IN CYCLING AND HANDCYCLINGAND...
MUSCULOSCELETAL EFFICIENCY IN CYCLING
AND HANDCYCLINGAND HANDCYCLING
Dr. Harald BöhmOrthopaedic Hospital for ChildrenAschau im Chiemgau, Germary
AgendaAgenda
• Index of efficiency: Definition and relevance in cyclingy g
• Musculoskeletal simulation of cycling
• Handcycling: the force generation abilities of the arms
• Simulation of handcycling
M l l h d i 3D• Muscle‐length and momentarms in 3D
2
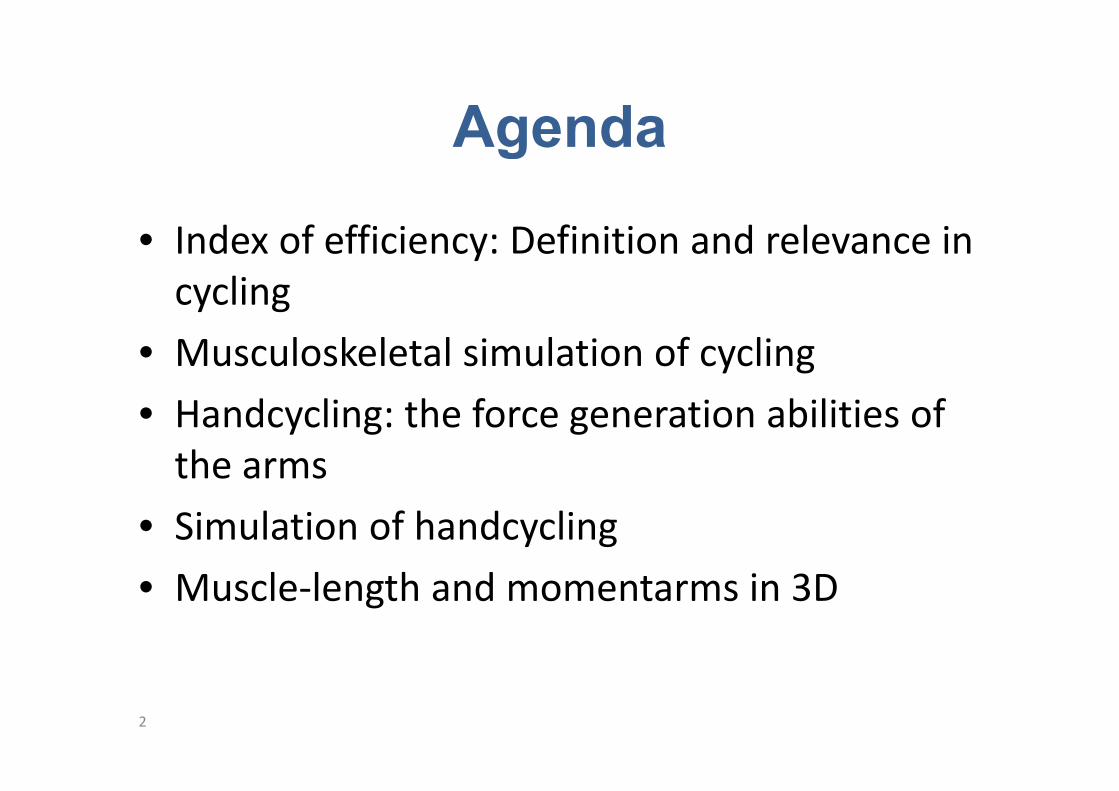
Only tangential force contributes to propulsion
F di lFradial
Ft ti l3
Ftangential

Pedal forces in cycling
360°/0°
270°
90°
270
180°
4
Böhm et al. 2008. Effects of short‐term training using SmartCranks on cycle work distribution and power output during cycling, European Journal of Applied Physiology, 103 (2), 225‐232
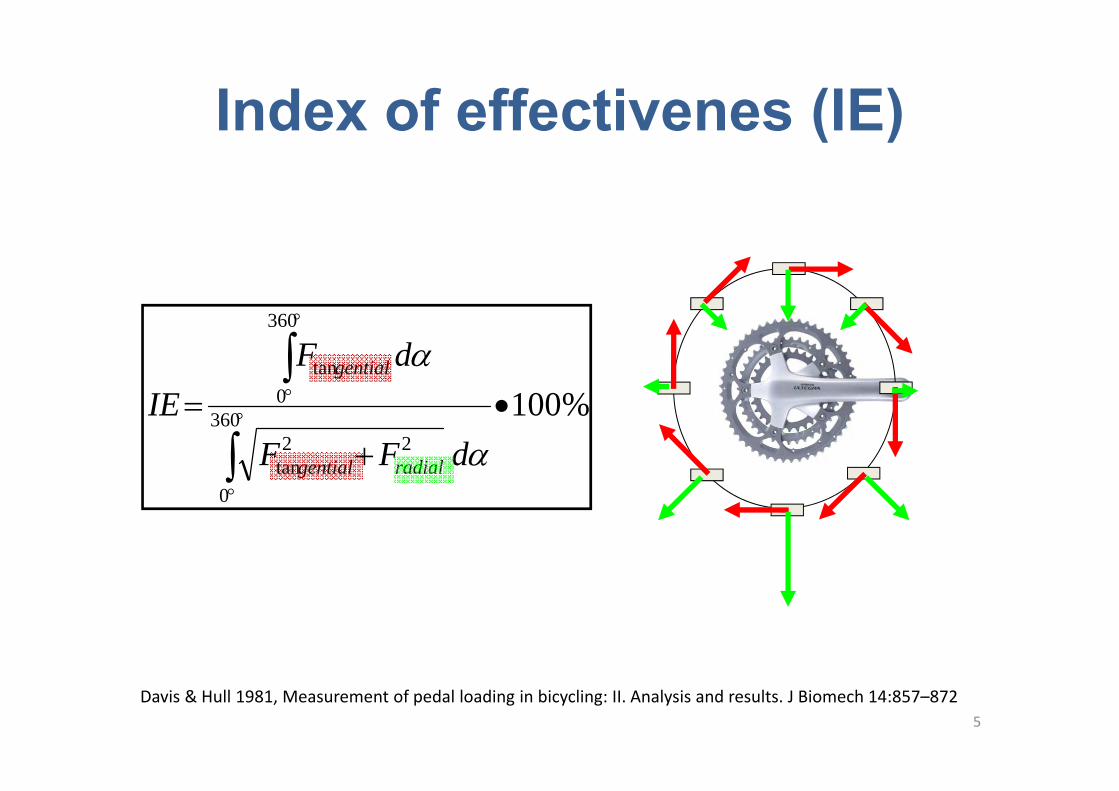
Index of effectivenes (IE)Index of effectivenes (IE)
%100
360
0tan∫
°
°
αdFIE
gential
%10036022
tan
0 •+
=
∫°
αdFFIE
radialgential0°
5
Davis & Hull 1981, Measurement of pedal loading in bicycling: II. Analysis and results. J Biomech 14:857–872
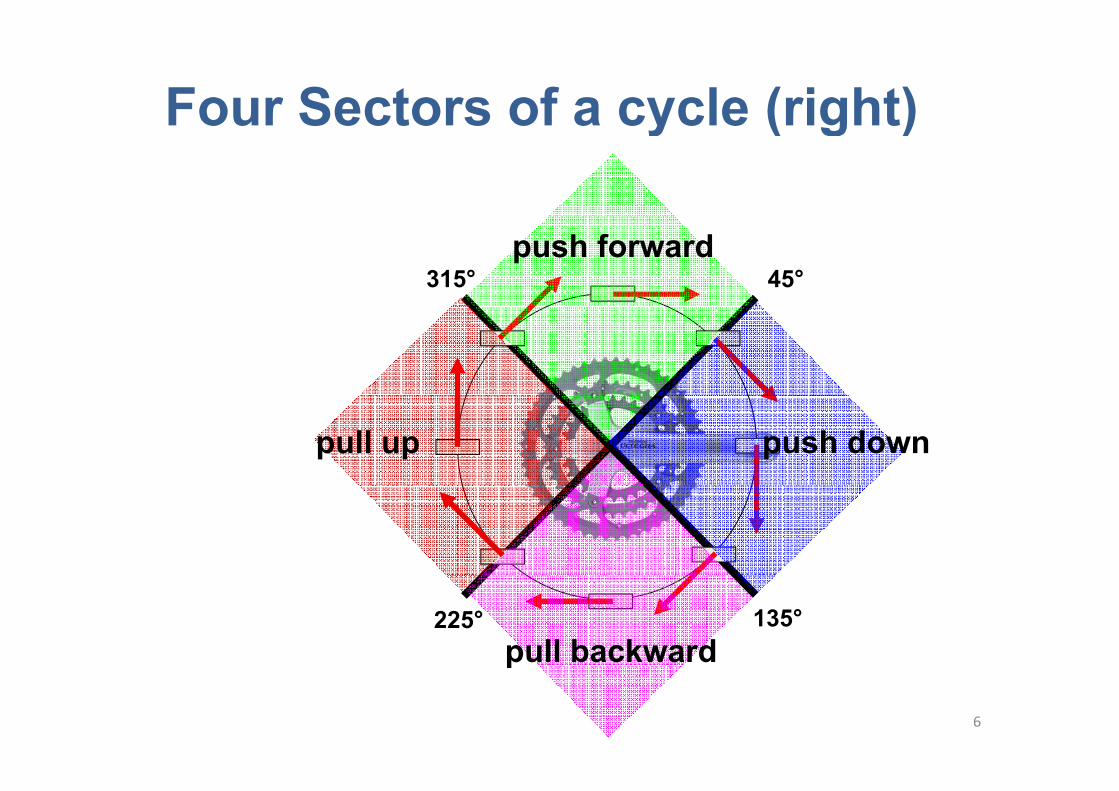
Four Sectors of a cycle (right) y ( g )
315° 45°push forward
push downpull up
135°225°pull backward
6
p
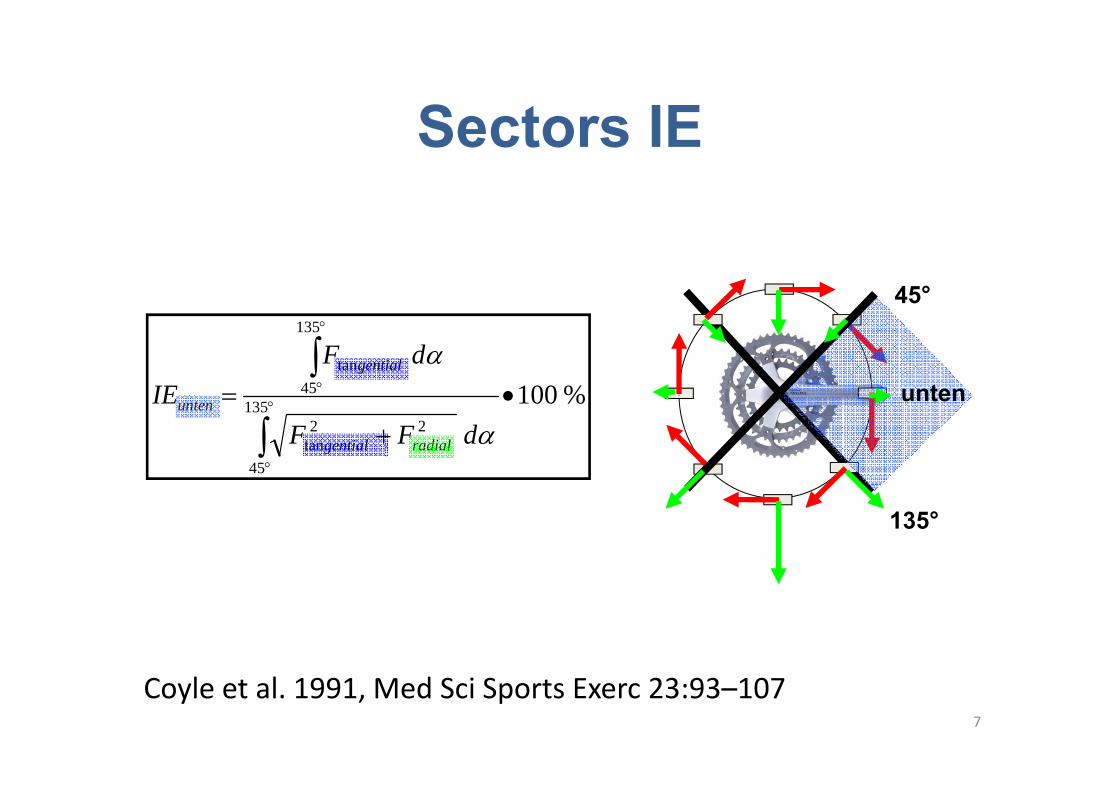
Sectors IESectors IE
45°
%100
135
45tan
•=∫°
°
αdFIE
gential
unten%100135
45
22tan
•+
=
∫°
°
αdFFIE
radialgential
unten unten
135°
7
Coyle et al. 1991, Med Sci Sports Exerc 23:93–107

IE at different power levelsIE at different power levels100
60
80
]
20
40
vene
ss [%
]
-20
0
x of
effe
ctiv
80
-60
-40
inde
30 40 50 60 70 80 90 100 110-100
-80
power [% maximum individual power]
8Böhm et al. 2008, European Journal of Applied Physiology, 103 (2), 225‐232
p [ p ]
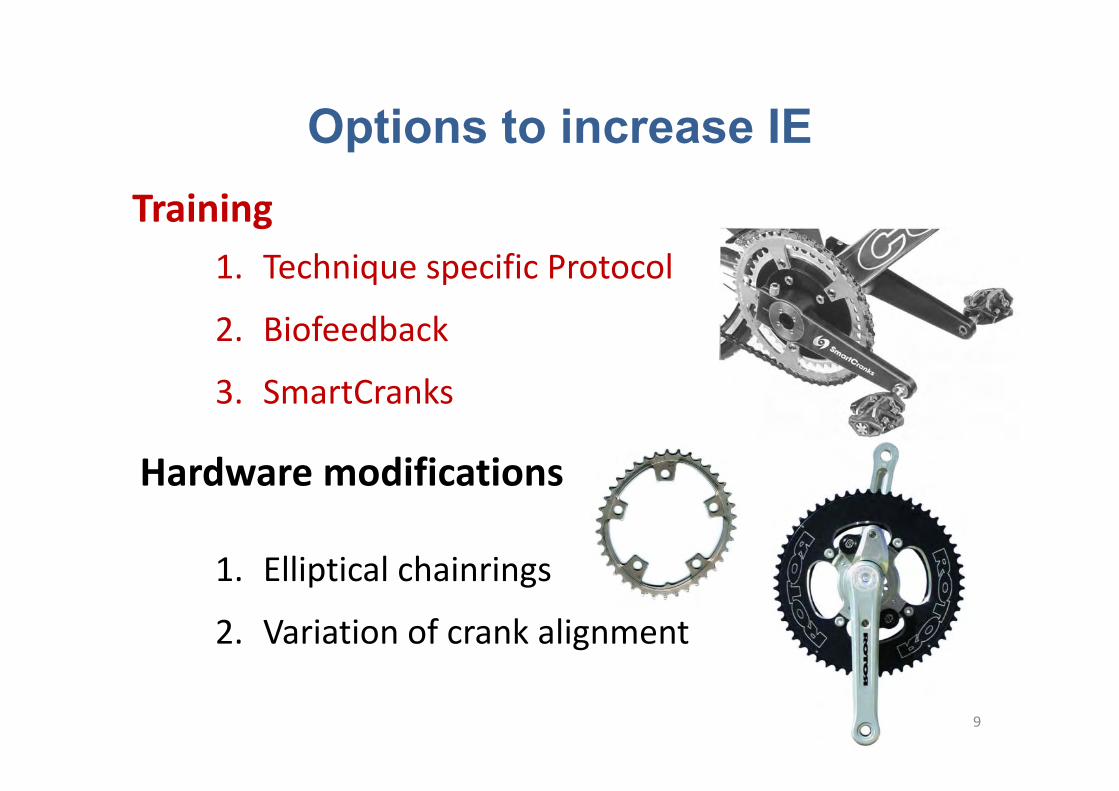
Options to increase IEOptions to increase IETraining
1. Technique specific Protocol
Training
2. Biofeedback
3 SmartCranks3. SmartCranks
Hardware modifications
1 Elliptical chainrings
Hardware modifications
1. Elliptical chainrings
2. Variation of crank alignment
9

Relevance of IE in CyclingStudies relating energy consumption and power
t t t b tt IE ( h d h )
Relevance of IE in Cycling
output to better IE (no hardware changes)
Recreational cyclists: y1. Lafortune & Cavanagh 1983
1. Ericson & Nissel 19882 Coyle et al 19912. Coyle et al. 1991
Professionals:1 Lafortune & Cavanagh 19831. Lafortune & Cavanagh 1983 2. Hillebrecht et al. 19983. Cavanagh & Sanderson 19864 K t & F lt 19914. Kautz & Feltner 1991

Where is the problem?Where is the problem?
BiomechanicsMechanics Biology
+ =
I d fIndex ofEffectiveness
11
Hypothesis
For efficient c cling the m sc loskeletal
Hypothesis
For efficient cycling the musculoskeletal system requires radial forces
SummarySummary
• Index of effectiveness (IE) is the relation of tangential forces to total forces applied to the g pppedal
• IE can be subdivided into four sectors defined by the action of the cyclist
• IE does not show any relation to efficiency or power production in professional or recreational cyclists
13
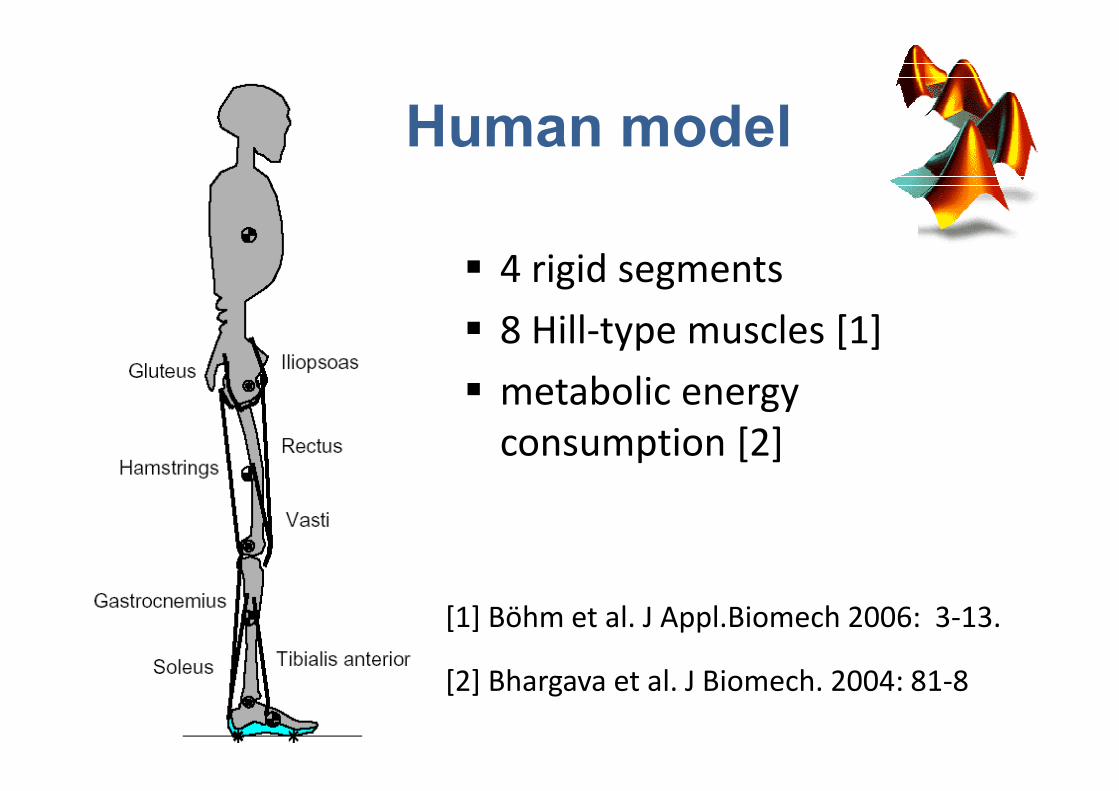
Human modelHuman model
4 rigid segments
8 Hill‐type muscles [1]
metabolic energymetabolic energy consumption [2]
[1] Böhm et al. J Appl.Biomech 2006: 3‐13.
[2] Bhargava et al. J Biomech. 2004: 81‐8]

Muscle metabolic energy [1]++++=+= WBSMAWHE &&&&&&&&
Muscle metabolic energy [1]
=E& energy rate
=
WH&
& heat rate
ork rate )(f=
=
A
W&
work rate
activation heat rate ))/exp(,,(),(
tmactfvFf
stim
CECE
−==
τ
=
=
SM&
& maintainance heat rate
shortening heat rate ),),((
)/,,(
max
,
vFlFf
llmactf
CECECEiso
optCECE
=
=
=B&g
basal metabolic heat rate )(),),(( max,
mff CECECEiso
=
Bicycle modelBicycle model
seating position [2]
air resistance
inertia of bike, rider and ,wheels
free wheel clutchfree wheel clutch
[2] GRESSMANN, M.: Fahrradphysik und Biomechanik. Technik, Formeln, Gesetze, (8.Auflage). Bielefeld: Delius Klasing, (2003).

Optimization of muscle activation
Genetic algorithm
Optimisation goal:Optimisation goal:a) reduction of metabolic energy consumptionb) increase of index of efficiencyb) increase of index of efficiency
ion
activati
Crank angle [°]

Validation Study
N]
y
• Ergometer 280 W, 90 rpm • 20 male amateur cyclists
. force
[N
(28±7 y , 180±5cm, 76±8kg)
tang
orce
[N]
radial fo
Crank angle [°]
Böhm et al. 2008. Effects of short‐term training using SmartCranks on cycle work distribution and power output during cycling, European Journal of Applied Physiology, 103 (2), 225‐232
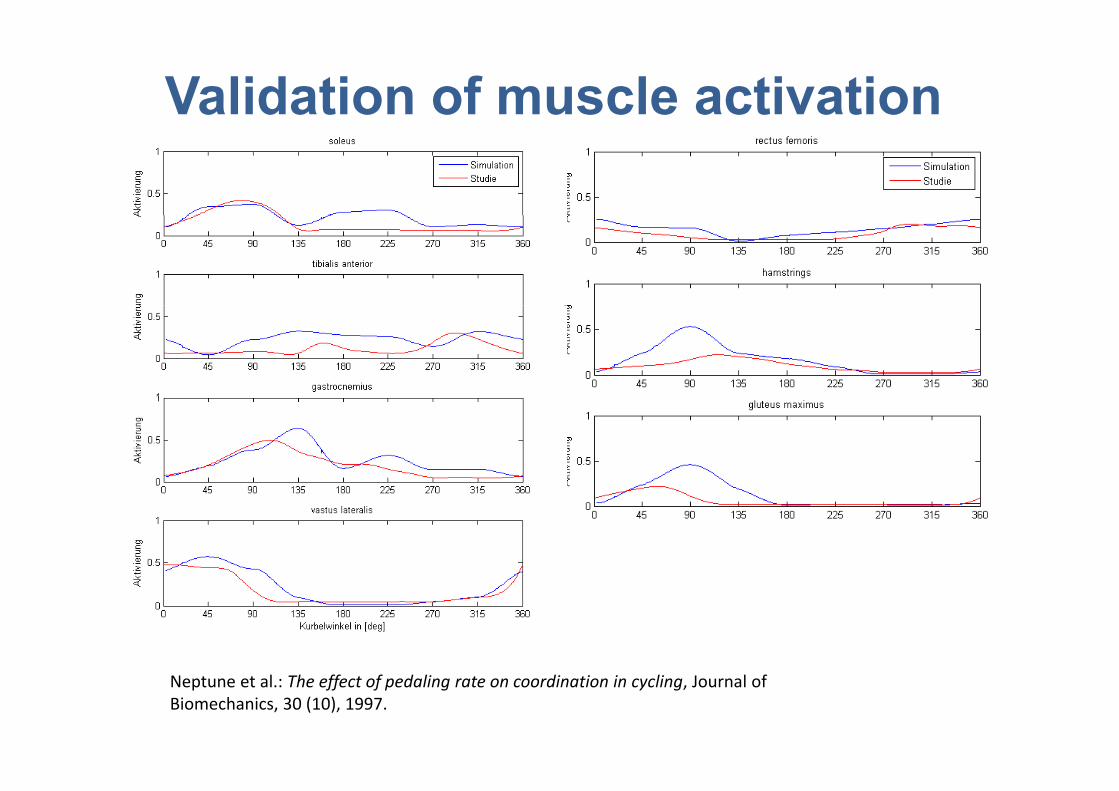
Validation of muscle activation
Neptune et al.: The effect of pedaling rate on coordination in cycling, Journal ofBiomechanics, 30 (10), 1997.
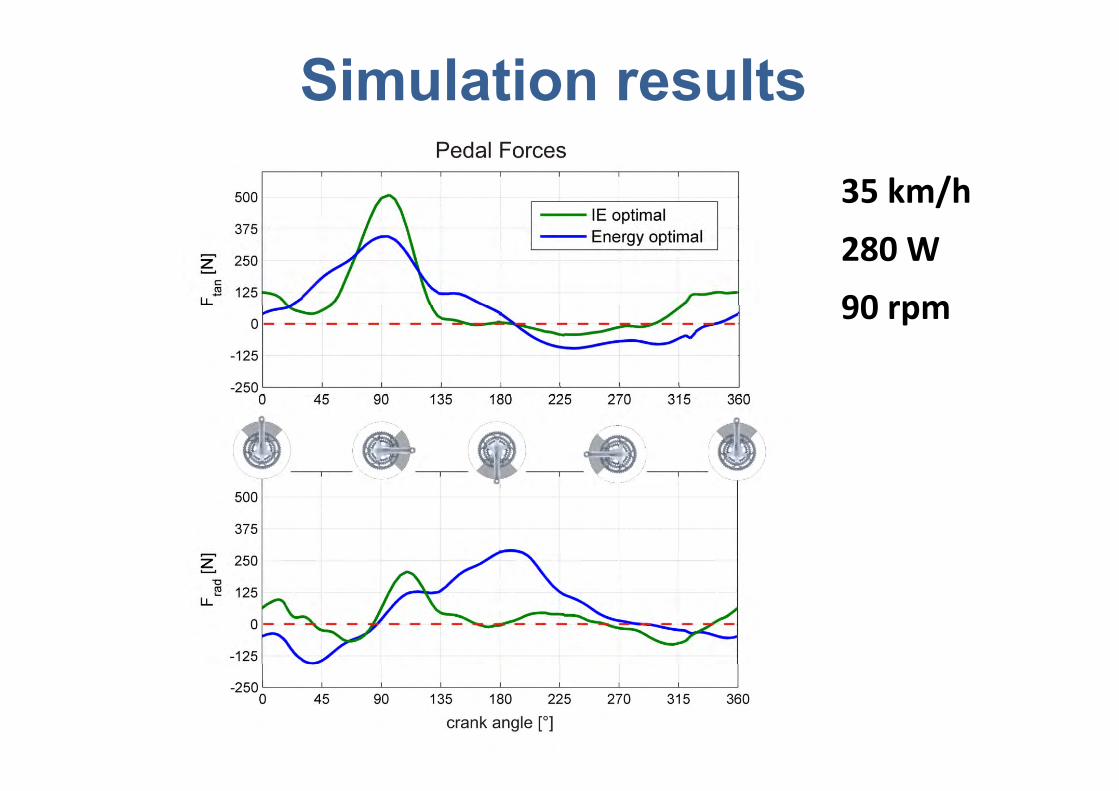
Simulation results
35 km/h
280 W
90 rpm90 rpm
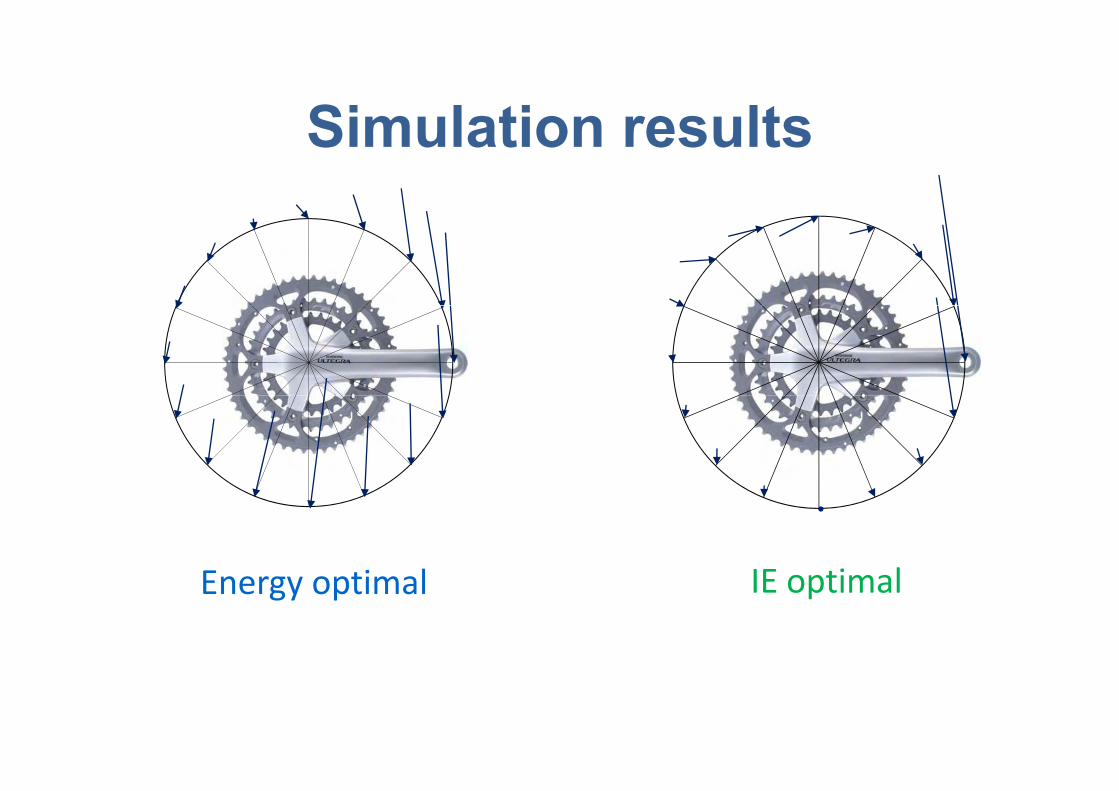
Simulation resultsSimulation results
E ti l IE optimalEnergy optimal IE optimal
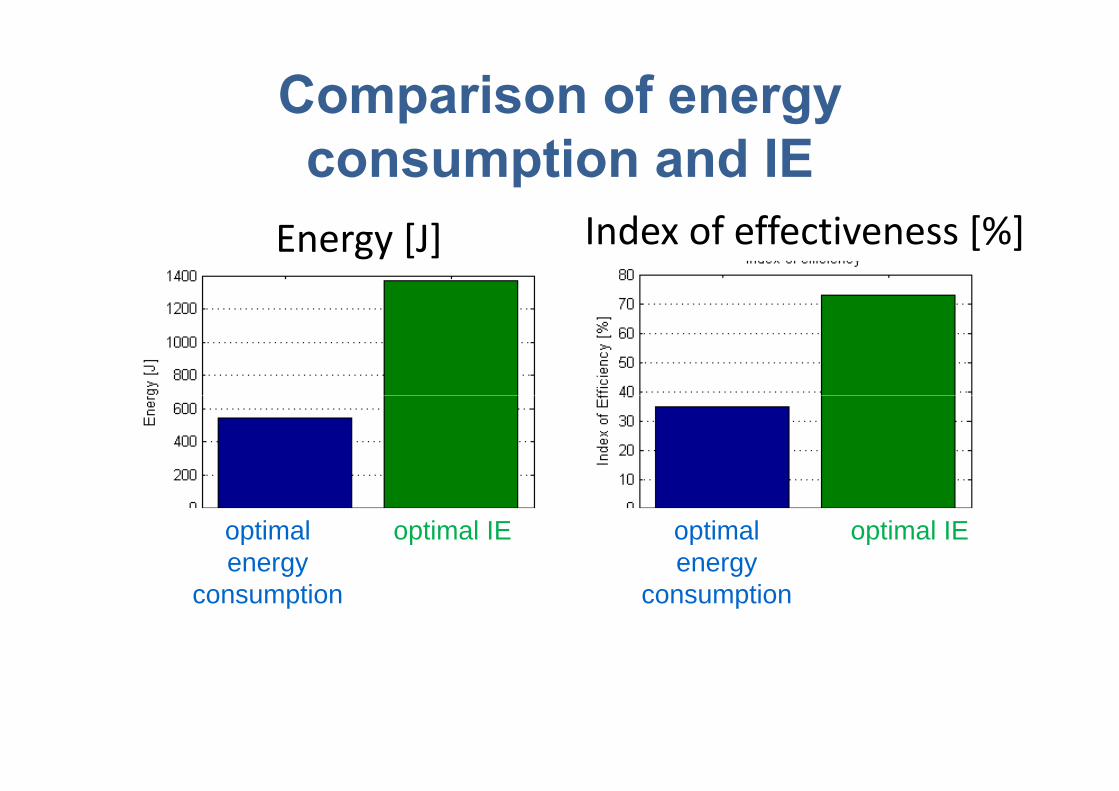
Comparison of energy consumption and IE
d f ff [ ]Energy [J] Index of effectiveness [%]
optimal energy
optimal IE optimal energy
optimal IEgy
consumption gy
consumption
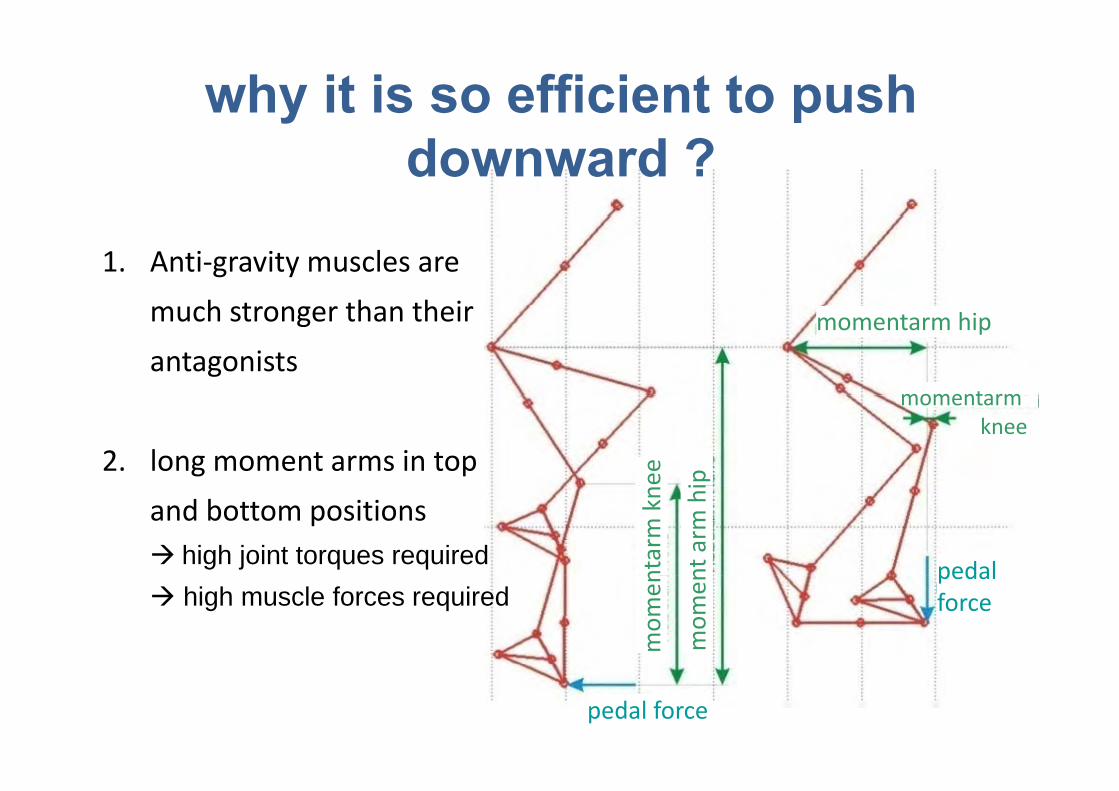
why it is so efficient to push downward ?
1. Anti‐gravity muscles are
h t th th i momentarm hip
momentarm
much stronger than their
antagonistsmomentarm
knee
ee ip
2. long moment arms in top
pedalntarm kn
ntarm hi
and bottom positionshigh joint torques required pedal
force
mom
en
mom
enhigh muscle forces required
pedal force
Conclusioni l d lli h i l i
ConclusionIE optimal pedalling technique results in 2.5 times higher energy consumptiong gy p
I d f Eff ti i t d t tIndex of Effectiveness is not adequate to quantify the quality of pedalling techniqueq y q y p g q
SummarySummary• Muscles energy consumption• Muscles energy consumption
might be estimated using the Hill muscle model
• Optimization for energy p gyconsumption results in realistic muscle activations
• Optimizing for IE results in considerably high energy comsumption
25
F
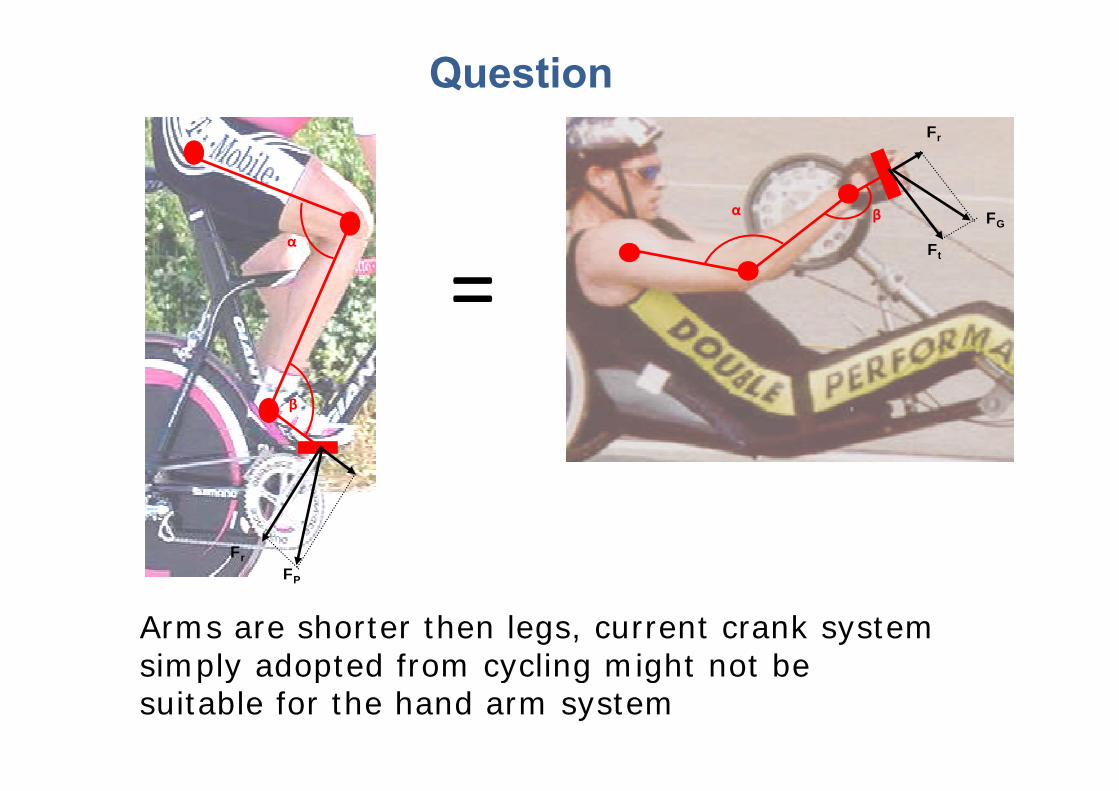
Question
α F
Fr
β FG
Ft
β
α
=Ft
β
Fr
F
Arms are shorter then legs, current crank system simply adopted from cycling might not be
FP
simply adopted from cycling might not be suitable for the hand arm system
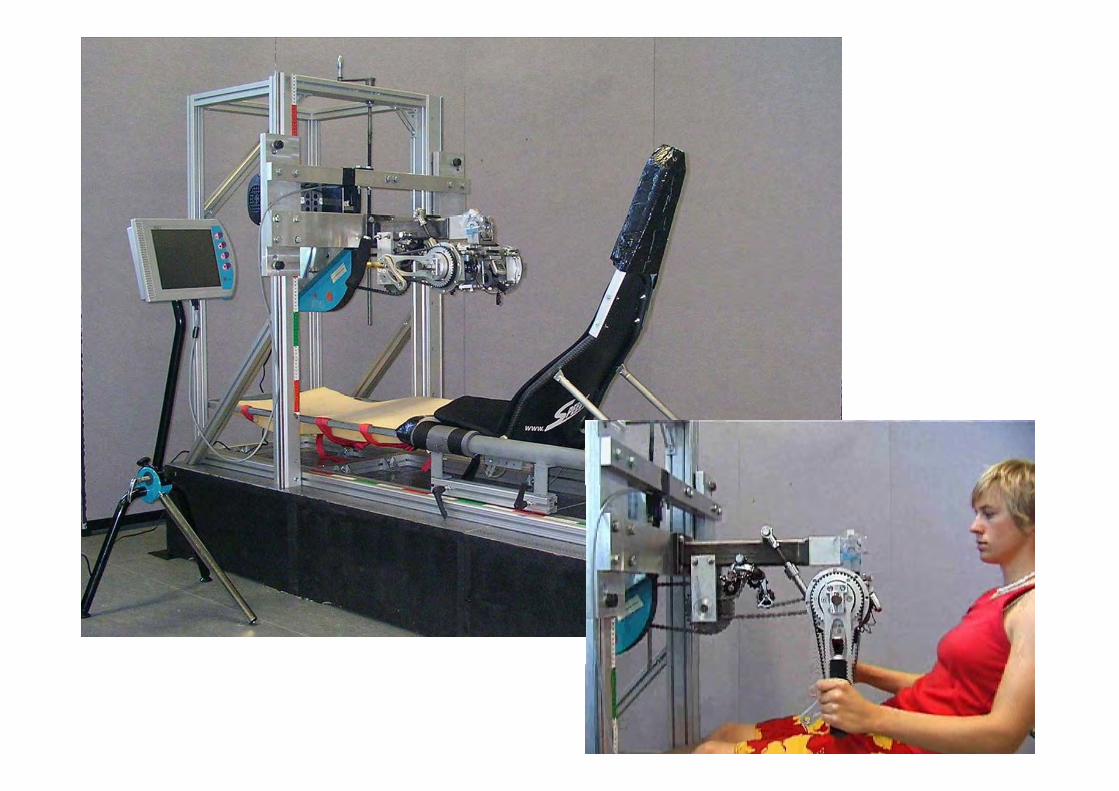
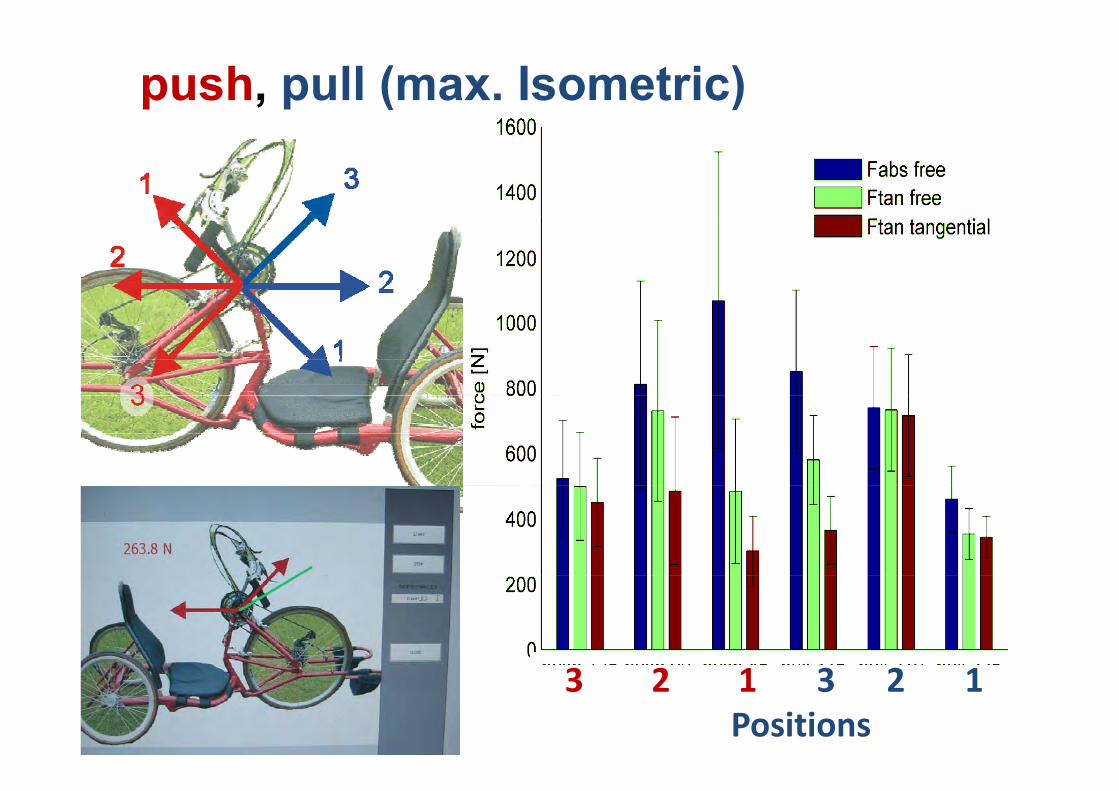
push, pull (max. Isometric)
3 2 1 3 2 1Positions

Device to measure isometric joint torques
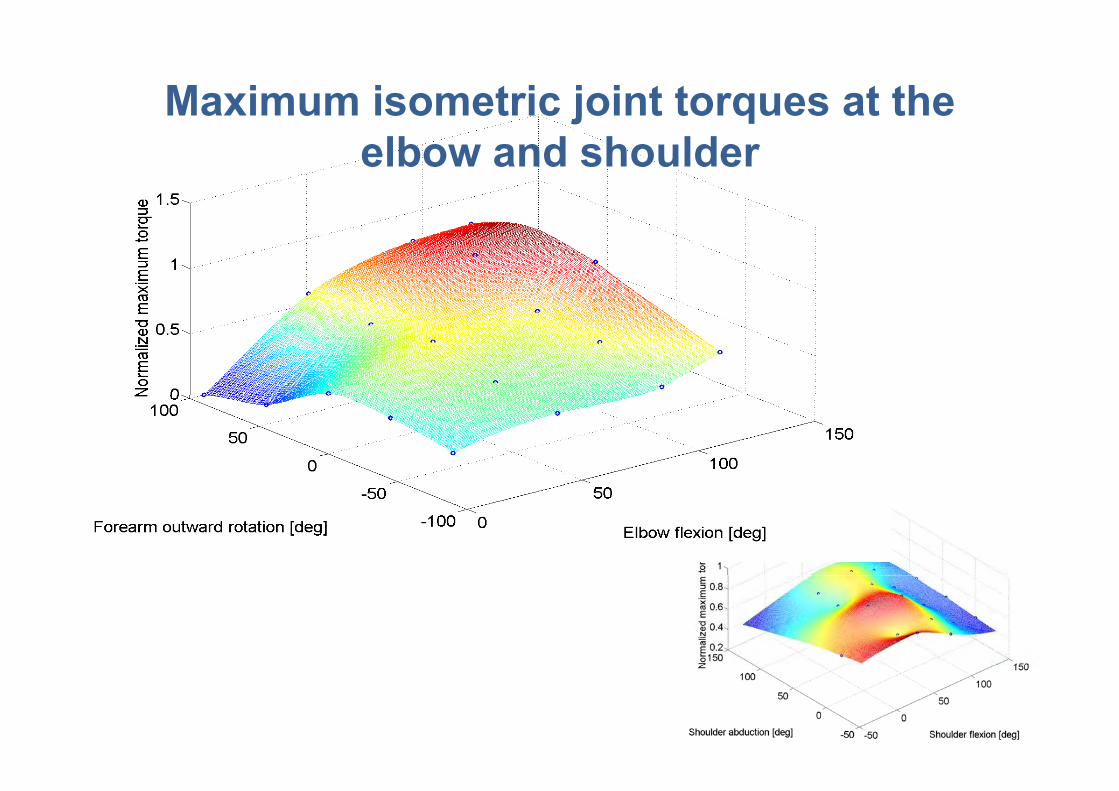
Maximum isometric joint torques at the elbow and shoulder
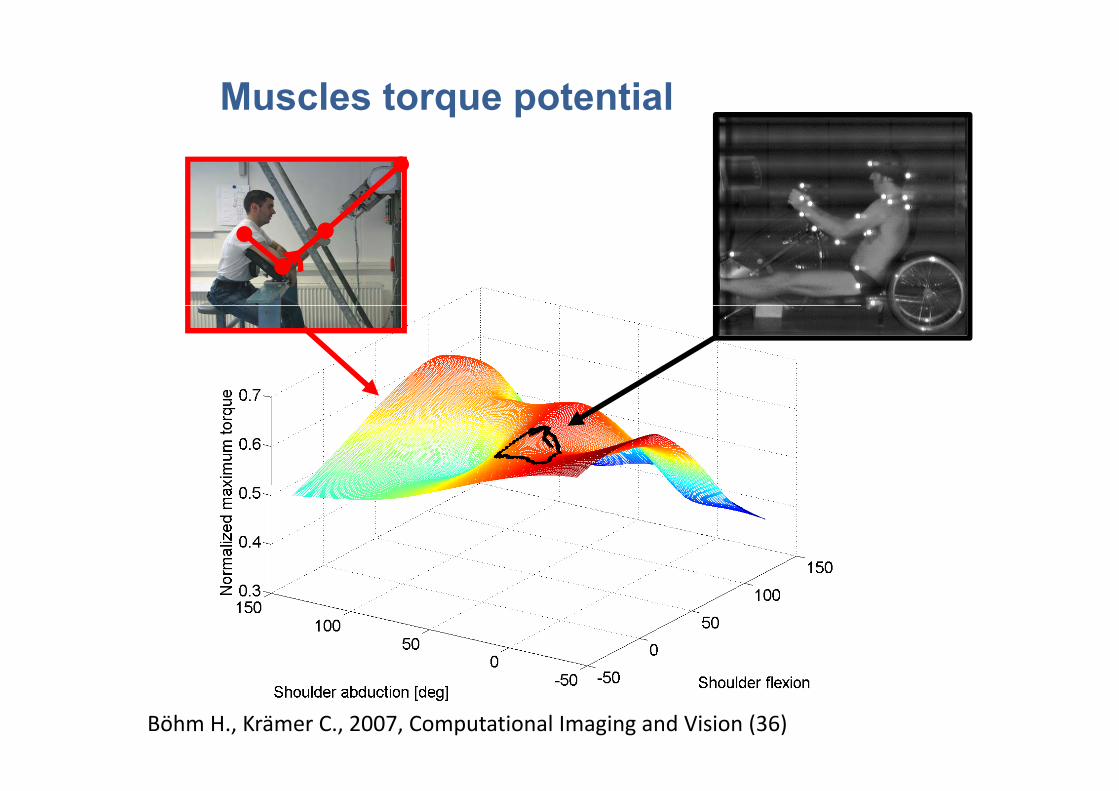
Muscles torque potential
Böhm H., Krämer C., 2007, Computational Imaging and Vision (36)
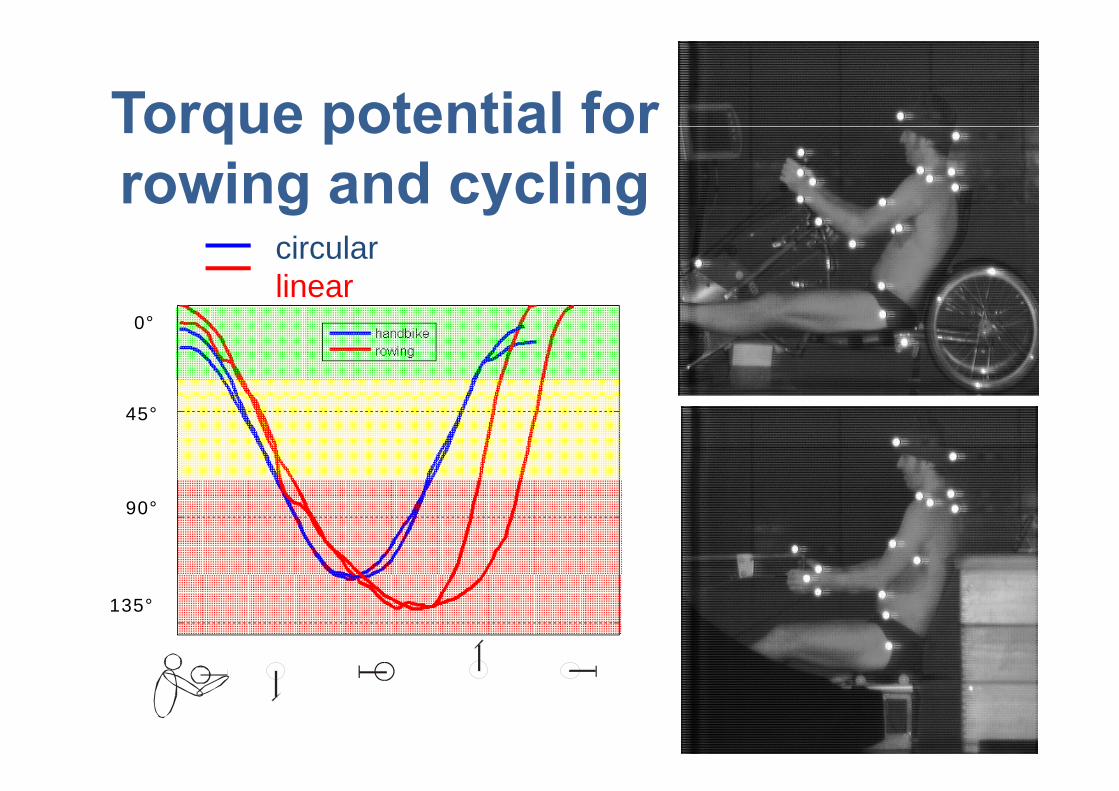
Torque potential forTorque potential for rowing and cycling
circularlinear
0°
45°
90°
135°
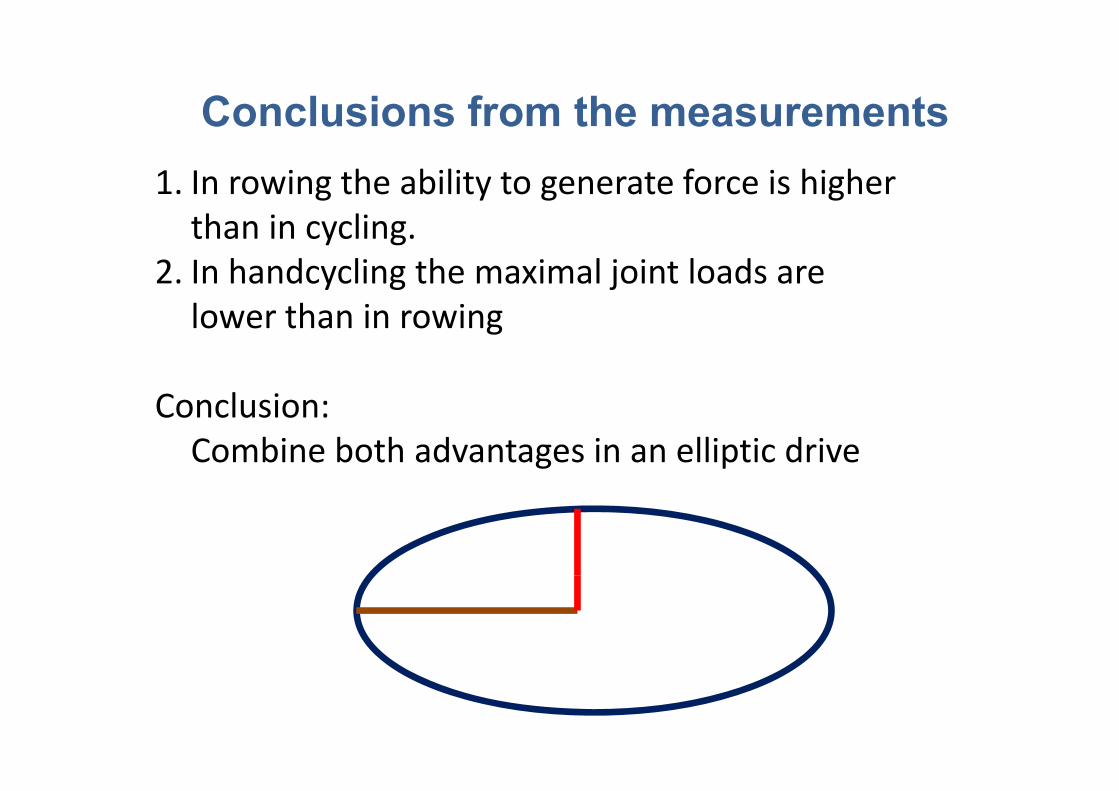
Conclusions from the measurementsCo c us o s o t e easu e e ts1. In rowing the ability to generate force is higher
h i lithan in cycling. 2. In handcycling the maximal joint loads are l h i ilower than in rowing
C l iConclusion:Combine both advantages in an elliptic drive

Hypothesisypot es s
Th lli ti d i t bl th•The elliptic drive concept enables the muscles to work in a better range of their force length relation, so that there is less activation required and less metabolic qenergy consumed than in a cyclic movementmovement
AgendaAgenda
• Index of efficiency: Definition and relevance in cyclingy g
• Musculoskeletal simulation of cycling
• Handcycling: the force generation abilities of the arms
• Simulation of handcycling
M l l h d i 3D• Muscle‐length and momentarms in 3D
35
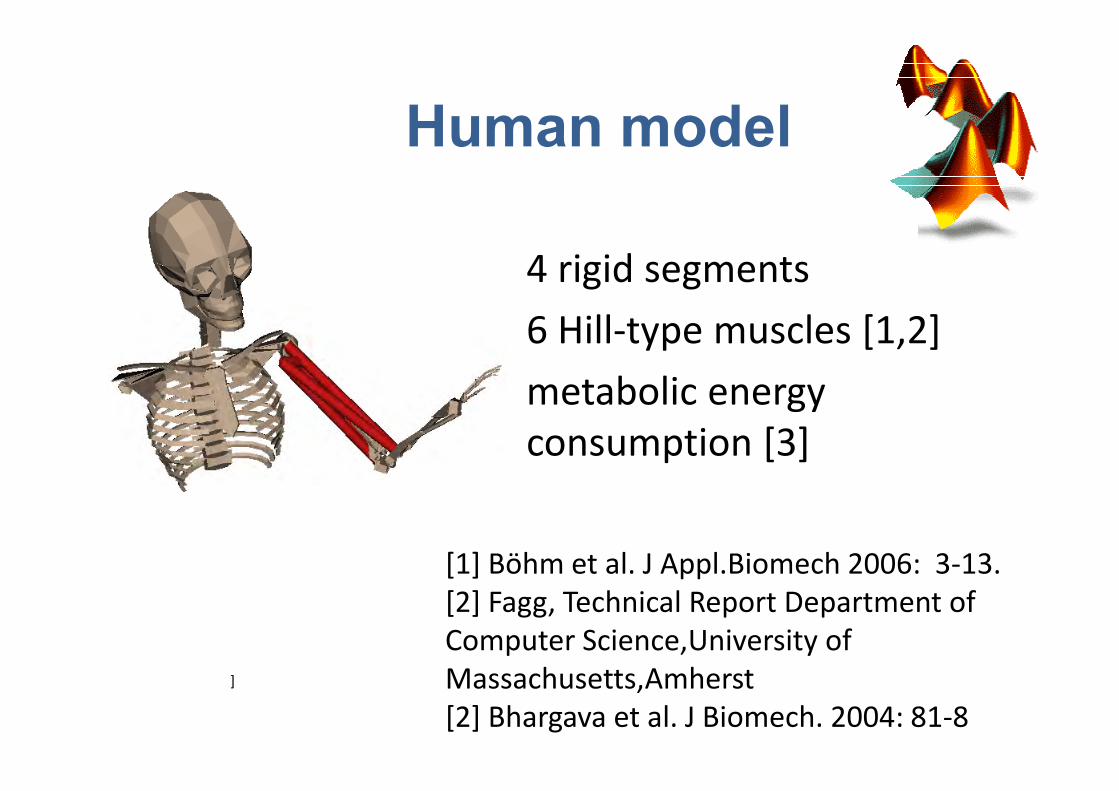
Human modelHuman model
4 rigid segments
6 Hill‐type muscles [1,2]
metabolic energymetabolic energy consumption [3]
[1] Böhm et al. J Appl.Biomech 2006: 3‐13.[ ] pp[2] Fagg, Technical Report Department of Computer Science,University of Massachusetts,Amherst[2] Bhargava et al. J Biomech. 2004: 81‐8
]
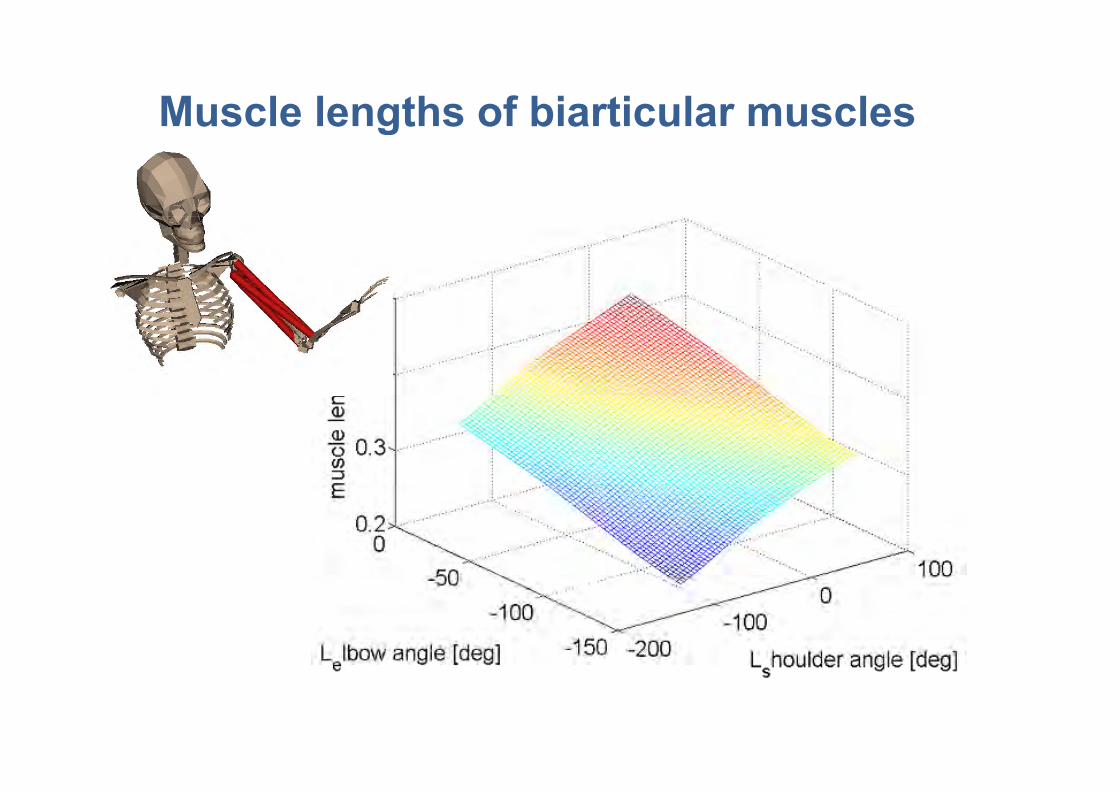
Muscle lengths of biarticular muscles usc e e gt s o b a t cu a usc es
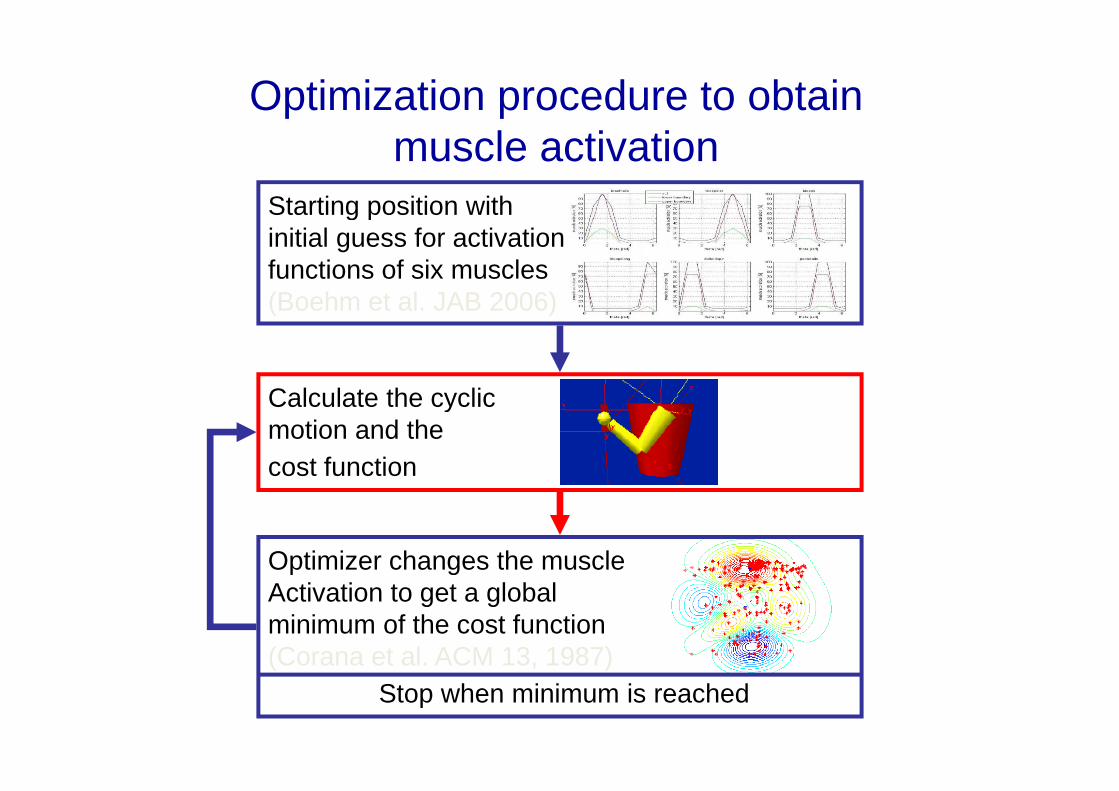
Optimization procedure to obtain muscle activation
Starting position withg pinitial guess for activation functions of six muscles(Boehm et al JAB 2006)(Boehm et al. JAB 2006)
Calculate the cyclicCalculate the cyclicmotion and the cost function
Optimizer changes the muscle gActivation to get a global minimum of the cost function (Corana et al. ACM 13, 1987)(Corana et al. ACM 13, 1987)
Stop when minimum is reached
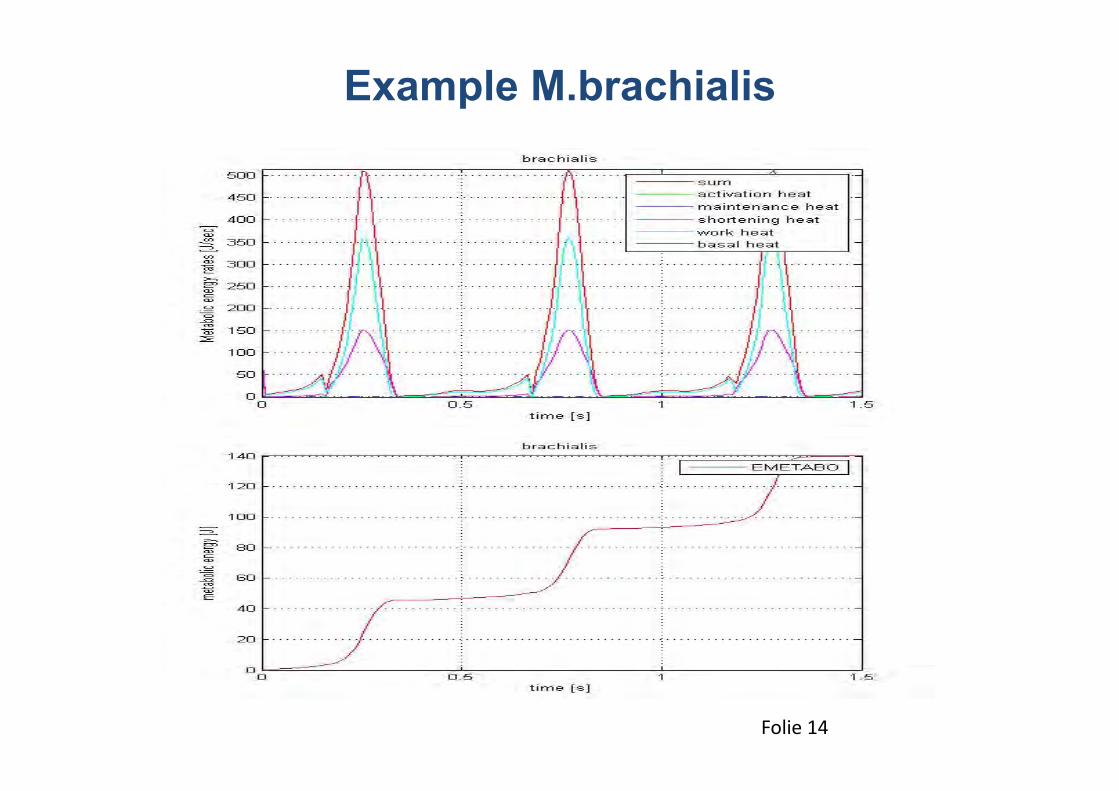
Example M.brachialis
Folie 14
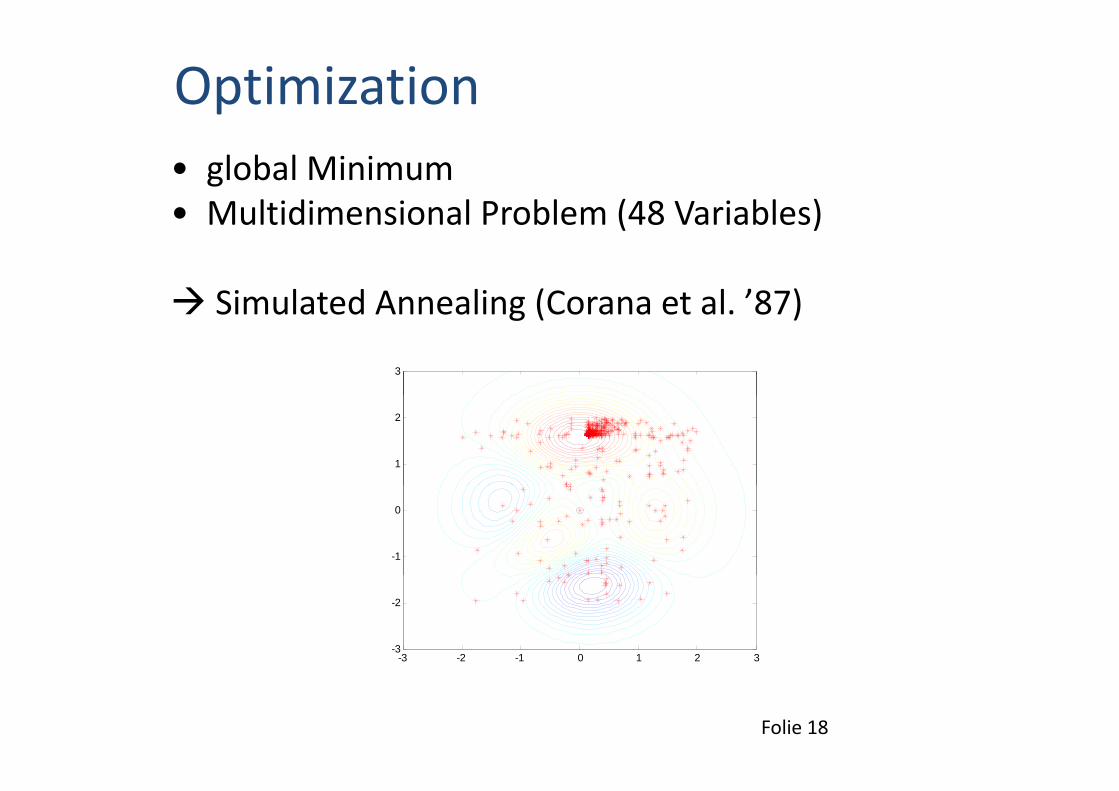
Optimization• global Minimum• Multidimensional Problem (48 Variables)• Multidimensional Problem (48 Variables)
Simulated Annealing (Corana et al ’87)
3
Simulated Annealing (Corana et al. 87)
1
2
-1
0
-3 -2 -1 0 1 2 3-3
-2
Folie 18

Simulated motion
cyclic drive (b/a=1) elliptical drive (b/a =0.5)
• m, 32 y, 170 cm, 72 kg
• drive resistance 20 Nm• drive resistance 20 Nm
• crank length 18 cm
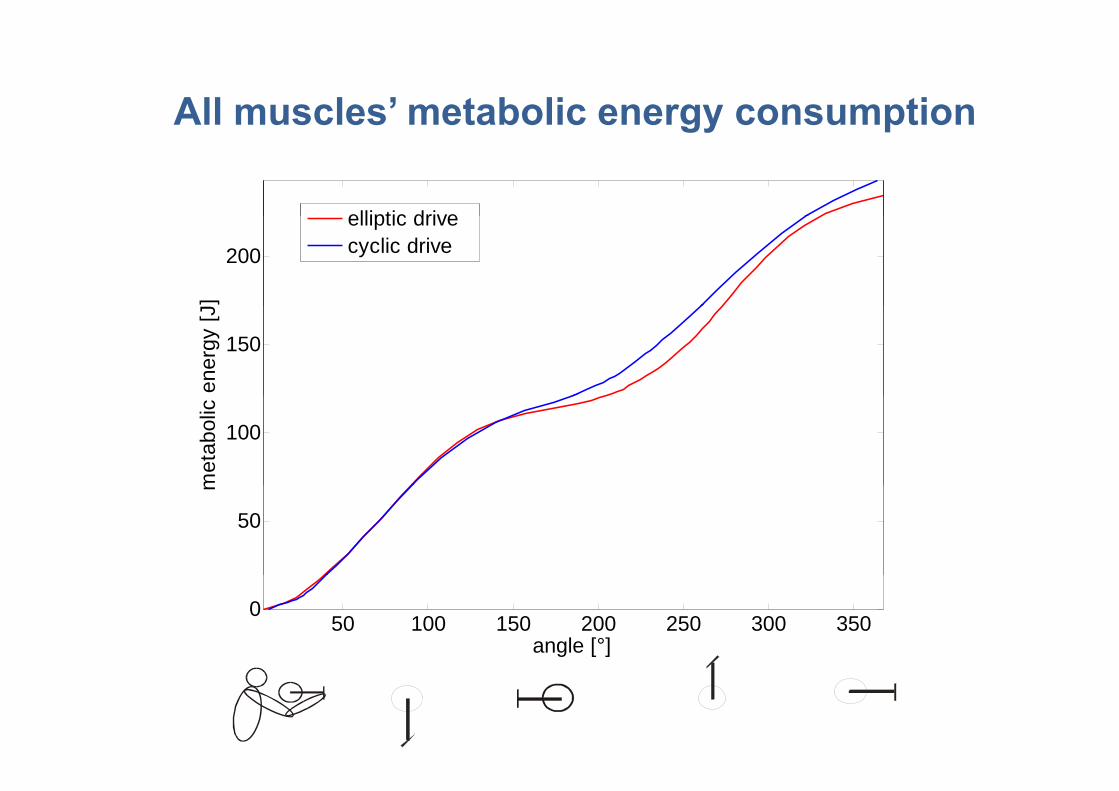
All muscles’ metabolic energy consumption
elliptic drive
gy p
200
]elliptic drivecyclic drive
150
ener
gy [J
100
met
abol
ic
50
m
50 100 150 200 250 300 3500
angle [°]
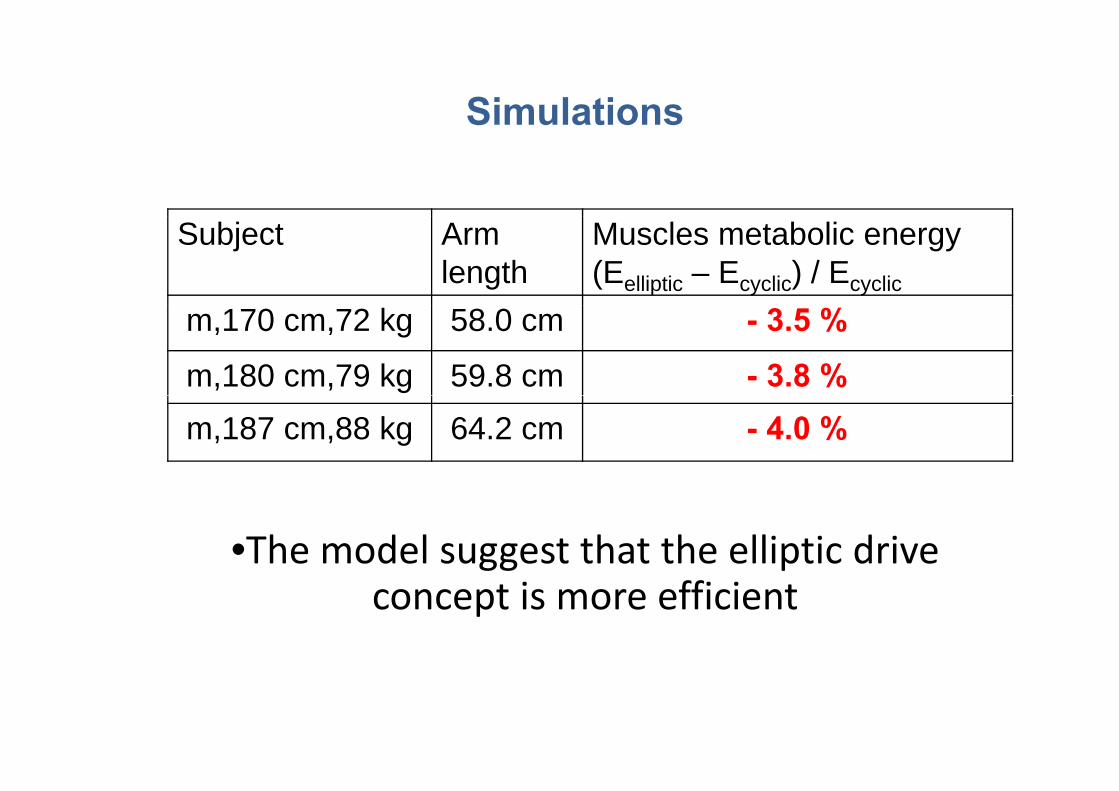
Simulations
Subject Arm length
Muscles metabolic energy (Eelliptic – Ecyclic) / Ecyclic
m,170 cm,72 kg 58.0 cm - 3.5 %
m,180 cm,79 kg 59.8 cm - 3.8 %m,187 cm,88 kg 64.2 cm - 4.0 %
•The model suggest that the elliptic drive concept is more efficient
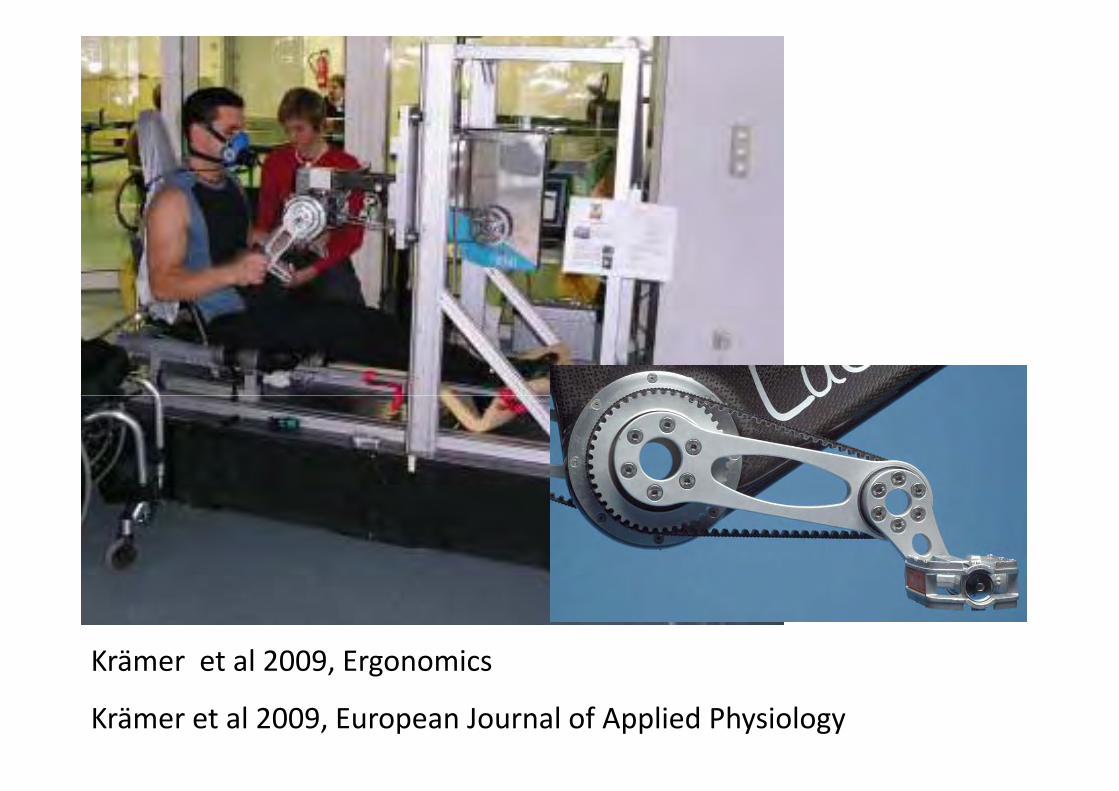
Krämer et al 2009 ErgonomicsKrämer et al 2009, Ergonomics
Krämer et al 2009, European Journal of Applied Physiology

2D to 3D2D to 3D
M l l th d t i 3D• Muscle length and momentarms in 3D are not known for complex arm movements such as forearm pronation and supination
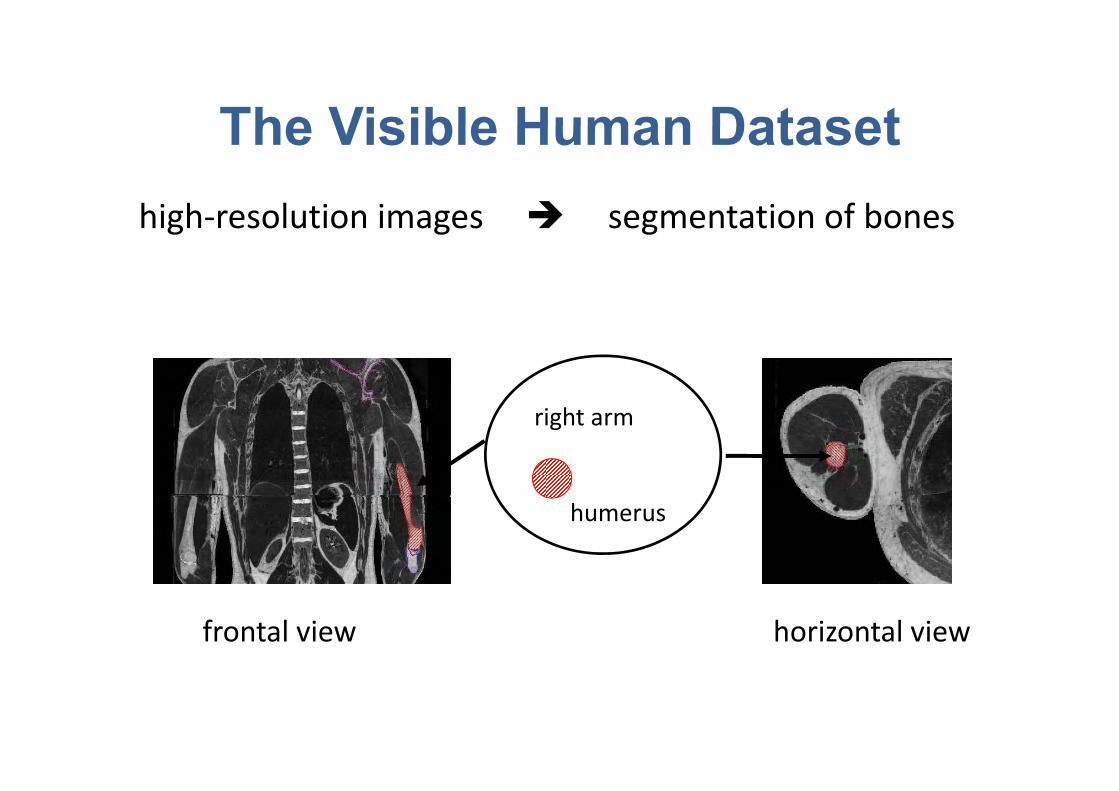
The Visible Human DatasetThe Visible Human Datasethigh resolution images segmentation of boneshigh‐resolution images segmentation of bones
right arm
humerus
frontal view horizontal view
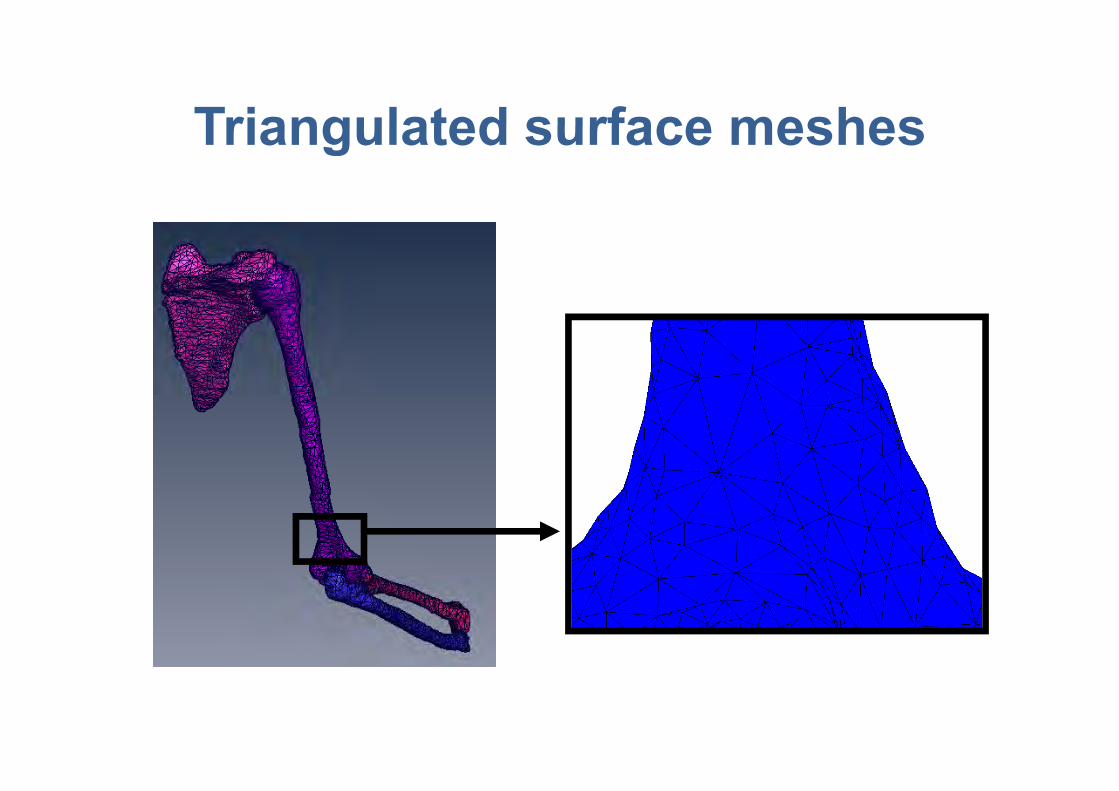
Triangulated surface meshesTriangulated surface meshes
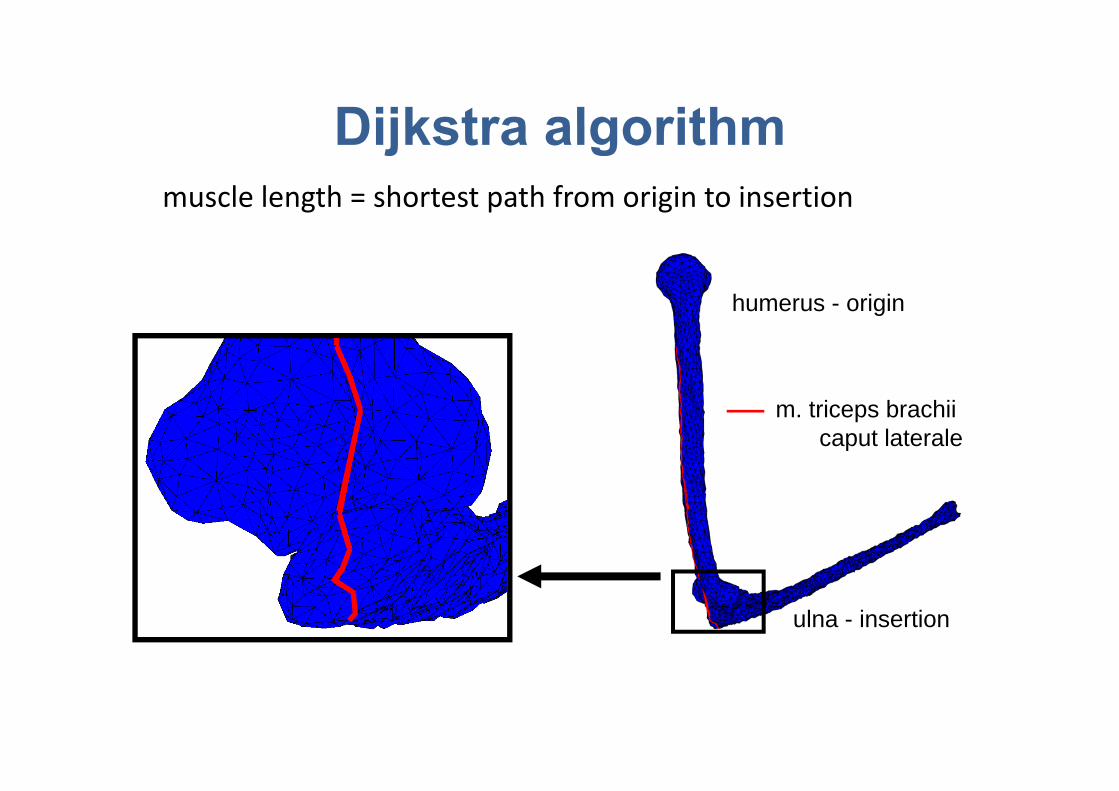
Dijkstra algorithmDijkstra algorithmmuscle length = shortest path from origin to insertion
humerus - originhumerus - origin
m. triceps brachii caput laterale
ulna - insertion
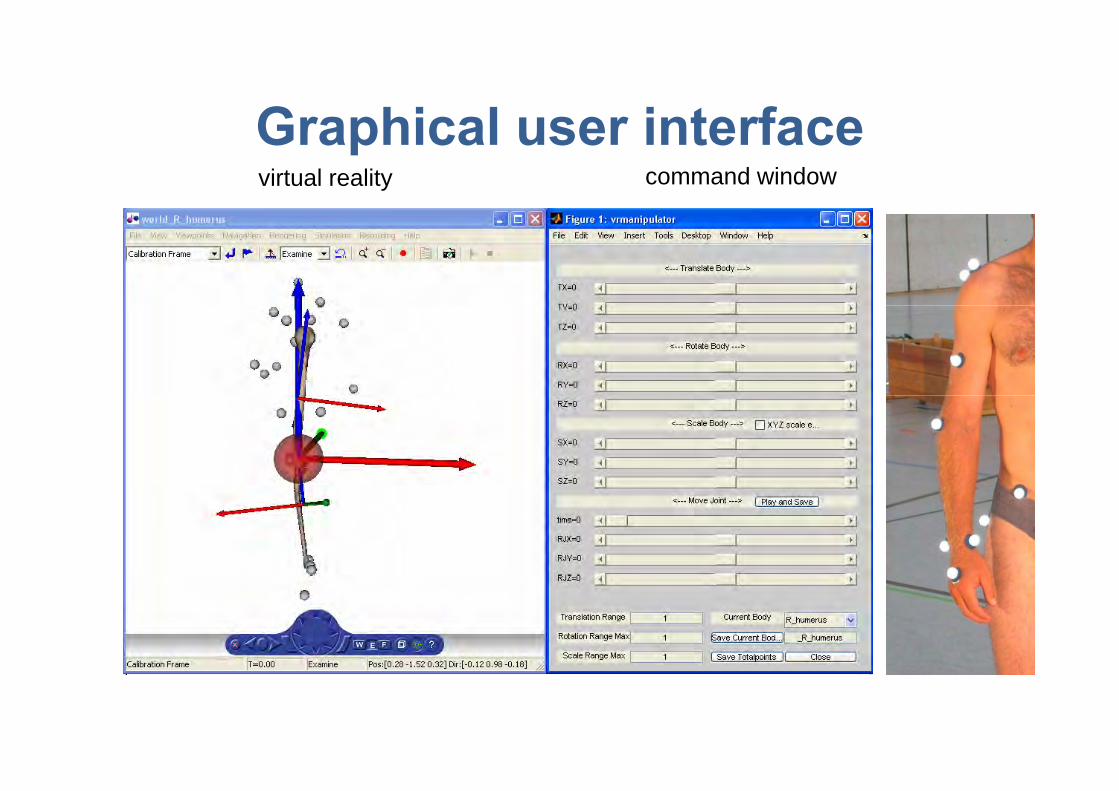
Graphical user interfaceGraphical user interfacevirtual reality command window

Extensor: m triceps brachiiExtensor: m. triceps brachii
Polynomial fit to Fagg 2003Dijk t l ith
≈ 2 cm
Dijkstra algorithm
extended arm flexed arm
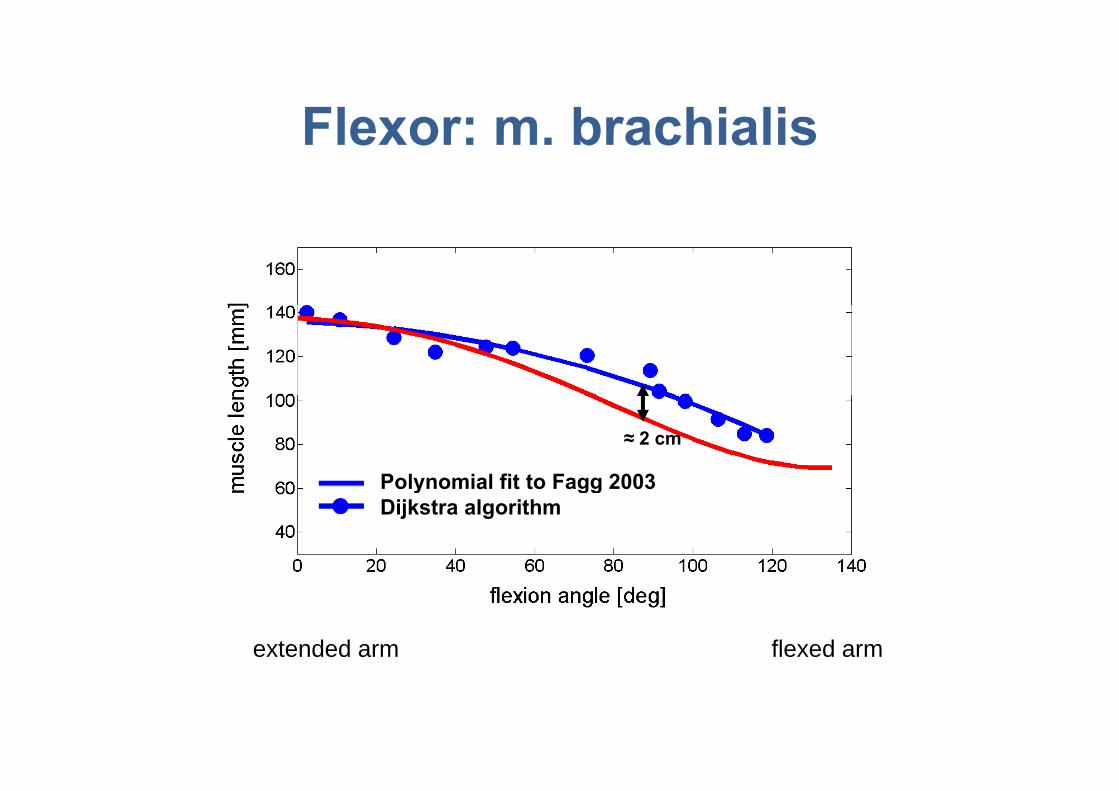
Flexor: m brachialisFlexor: m. brachialis
Polynomial fit to Fagg 2003
≈ 2 cm
Polynomial fit to Fagg 2003Dijkstra algorithm
extended arm flexed arm
ConclusionConclusion
All l l ti f i di id l l l th d i+ Allows calculation of individual muscle lengths during motion
+ Can be transferred to complex joint movements
+ Calculation is semi‐automatic
+ Works well for muscles close to the bony surface
Muscle deformation by minimizingdeformation energy
Krämer C., Böhm H., Senner V., 2008. Creating 3D muscle lengths and moment arms from the Visible Human Dataset, The Engineering of Sport 7, Springer, 2, 143‐148.
SSummary
• Elliptical drive was suggested to be more efficient in handcycling
• 3d simulation requires a lot more work
54