

António Pascoal 2011 Instituto Superior Tecnico [email protected] Loop Shaping (SISO case) 0db.
Upload
hakan-ertugrulCategory
view
51download
2
EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
EL2520Control Theory and Practice
Lecture 7:
Multivariable loop shaping
Elling W Jacobsen
School of Electrical Engineering
KTH, Stockholm, Sweden

EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
Course structure
Three parts
1. SISO control revisited
2. Multivariable control
a. Multivariable linear systems
b. Multivariable loop shaping (today)
c. Linear quadratic control
d. H2, H1 and design example
e. Decentralized control and decoupling
f. Glover-McFarlane loop shaping
3. Systems with hard constraints

EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
Multivariable systems cont’d
Last lecture…
• Transfer matrices and block diagram manipulations (order matters!)
• Poles and zeros of multivariable systems (from transfer matrices)
• System gain and amplification (directions matter!)
…continued this lecture
• Recap of last lecture
• Fundamental limitations and robustness of MIMO systems
• Modern multivariable loop shaping

EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
The multivariable frequency response
For a linear multivariable system Y(s)=G(s)U(s), we have
We can bound the amplification at any frequency using
with equality if U(i) parallell w. corresponding input singular vector.
EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
The multivariable frequency response
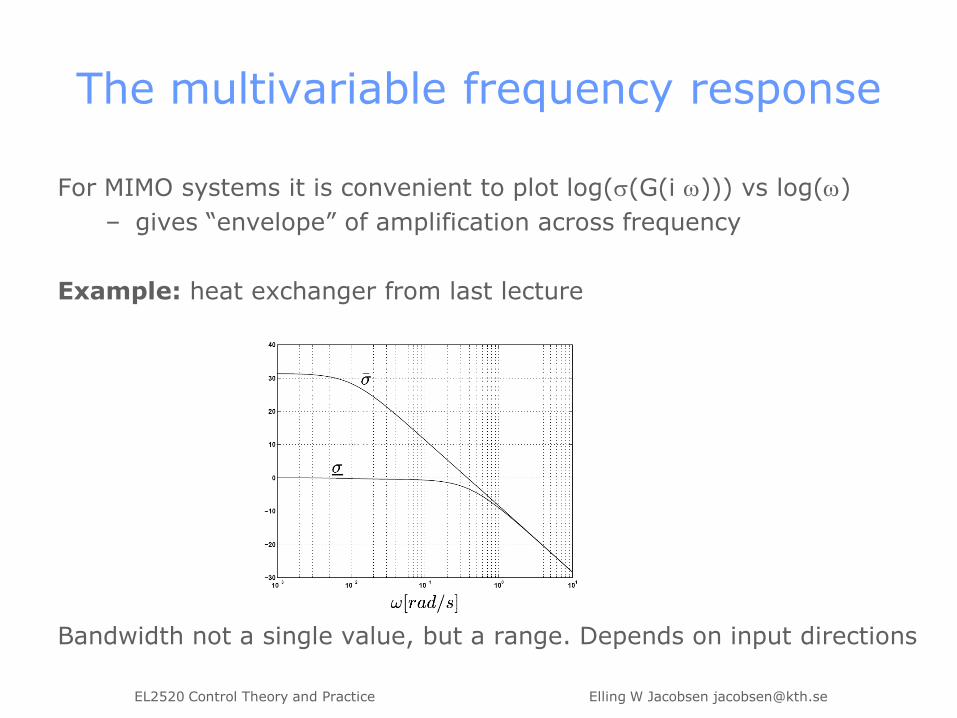
For MIMO systems it is convenient to plot log((G(i ))) vs log()
– gives “envelope” of amplification across frequency
Example: heat exchanger from last lecture
Bandwidth not a single value, but a range. Depends on input directions

EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
Multivariable (open-) loop shaping
Similar reasoning as in SISO case gives requirements on GFy
Note: should push up smallest singular value at low frequencies, and
make sure that largest singular value is small at high frequencies.

EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
As for scalar systems, we get
where
Note: the infinity norm computes the maximum amplifications
across frequency (sup) and input directions ( )
The system gain
EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
Poles and zeros of MIMO systems
Definition. The pole polynomial of a system with transfer matrix
G(s) is the common denominator of all minors of G(s)
Theorem. The poles of G(s) are the roots of its pole polynomial
Definition. The zero polynomial of G(s) is the greatest common
divisor of the maximal minors of G(s), normed so that they have
the pole polynomial of G(s) as denominator.
Theorem. The zeros of the G(s) are the roots of its zero polynomial.
EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
Notes on poles and zeros
For scalar system G(s) with poles pi and zeros zi,
For a multivariable system, directions matter!
For a multivariable system with pole p, there exist vectors up, vp:
Similarly, a zero at zi implies the existence of vectors uz, vz:
As for scalar systems, a zero at z implies that there exists a signal
on the form u(t)=vze-zt for t¸ 0, and u(t)=0 for t<0, along with initial values
x(0)=xz so that y(t)=0 for t¸ 0
EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
Example: RHP zeros
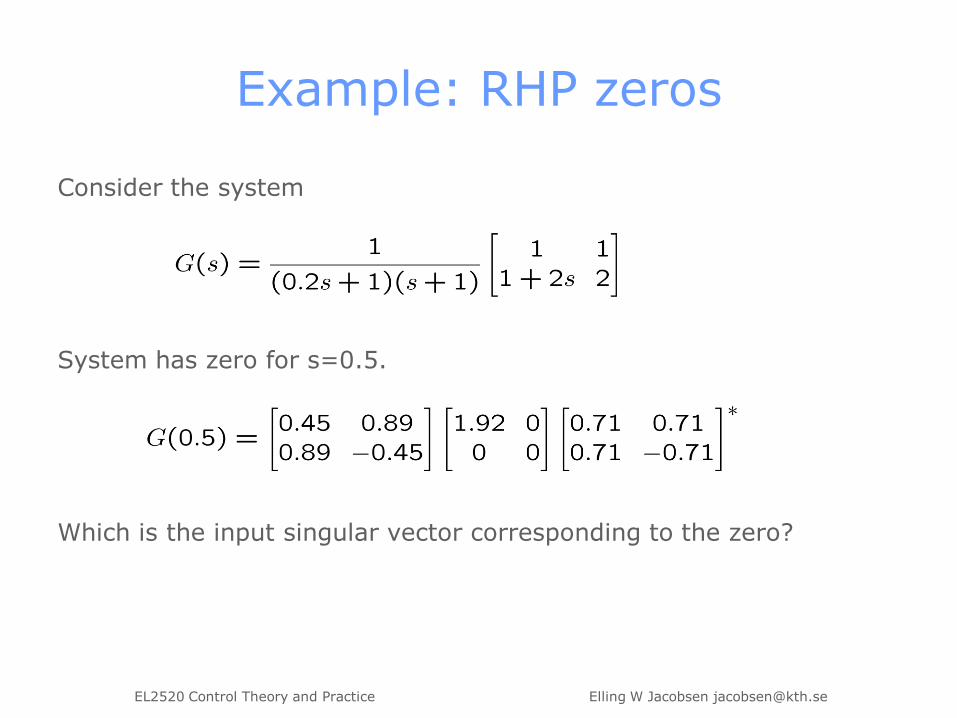
Consider the system
System has zero for s=0.5.
Which is the input singular vector corresponding to the zero?

EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
Example: RHP zeros cont’dStep responses for (u1, u2)=(1,0), (0,1) and (1,-1)
0 2 4 6 8 10-1
0
1
2
(u1,
u2)=
(1,
0)
y1(green) and y
2(blue)
0 2 4 6 8 10-1
0
1
2
(u1,
u2)=
(0,
1)
0 2 4 6 8 10-1
0
1
2
(u1, u
2)=
(1, -1
) Clear non-minimum phase behavior!
EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
Limitations due to RHP poles and zeros
As for SISO systems, RHP zeros and poles limit achievable performance
Example (non-minimum phase zero). Let G have a zero zin the right half plane, and let the scalar transfer function WS
be stable and minimum phase. Then, a necessary condition for
is that
Note. Implies bandwidth limitations on maximum singular value, butnot on the individual channels (more in the example at the end of this class)!
EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
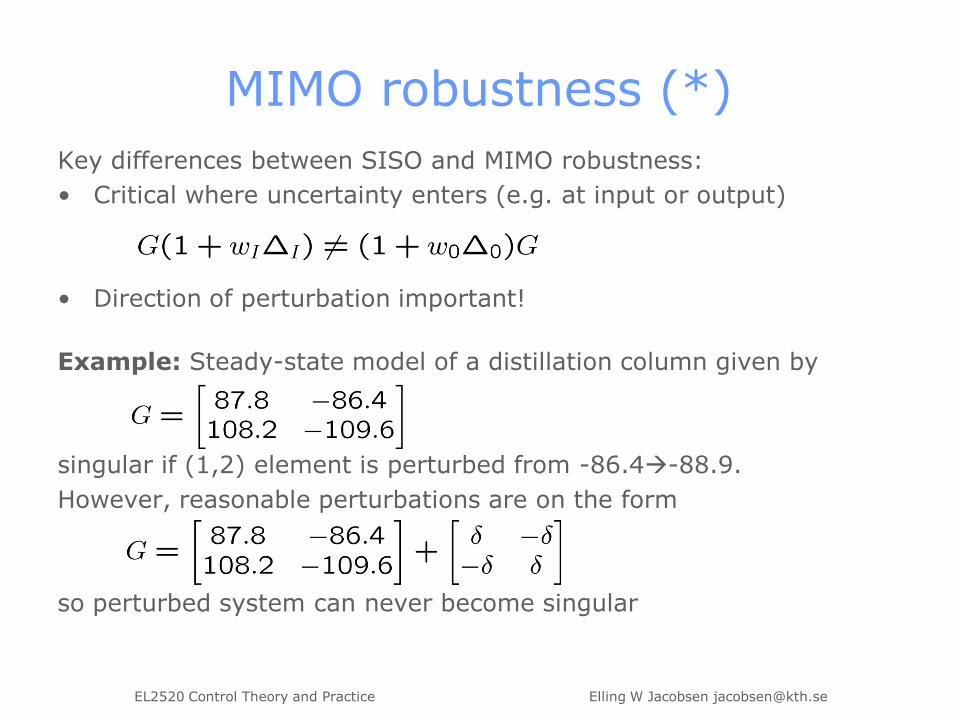
MIMO robustness (*)
Key differences between SISO and MIMO robustness:
• Critical where uncertainty enters (e.g. at input or output)
• Direction of perturbation important!
Example: Steady-state model of a distillation column given by
singular if (1,2) element is perturbed from -86.4-88.9.
However, reasonable perturbations are on the form
so perturbed system can never become singular
EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
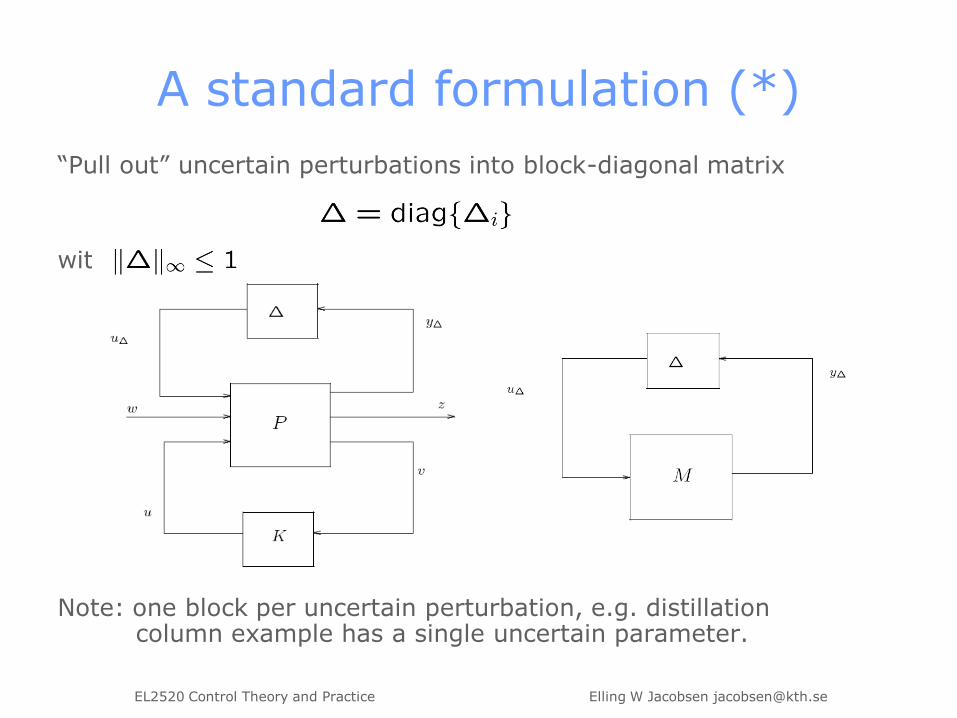
“Pull out” uncertain perturbations into block-diagonal matrix
with
Note: one block per uncertain perturbation, e.g. distillationcolumn example has a single uncertain parameter.
A standard formulation (*)

EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
The structured singular value (*)
Conservative to use small gain, e.g. require that
The structured singular value: find smallest structured perturbation
(in terms of ) that renders closed-loop unstable, i.e. causes
Then, the structured singular value
Powerful framework for analysis and design of robust MIMO controllers
• Details out of the scope of this course
• Learn more in our graduate (PhD-level) course on robust control!
EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
Multivariable systems cont’d
Last lecture…
• Transfer matrices and block diagram manipluations (order matters!)
• System gain and amplification (directions matter!)
• Poles and zeros of multivariable systems (from transfer matrices)
…continued on this lecture
• Recap of last lecture
• Fundamental limitations and robustness of MIMO systems
• Modern multivariable loop shaping

EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
Mixed sensitivity design
Note: Now, WS are matrices, constraints on maximum singular values
Forbidden area
Forbidden area
Convenient to design controller by constraining critical transfer matrices

EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
Approximate design specifications
Problem: find controller that satisfies specifications
Computationally more convenient to use the approximate form
Can be viewed as the norm of an extended system
EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
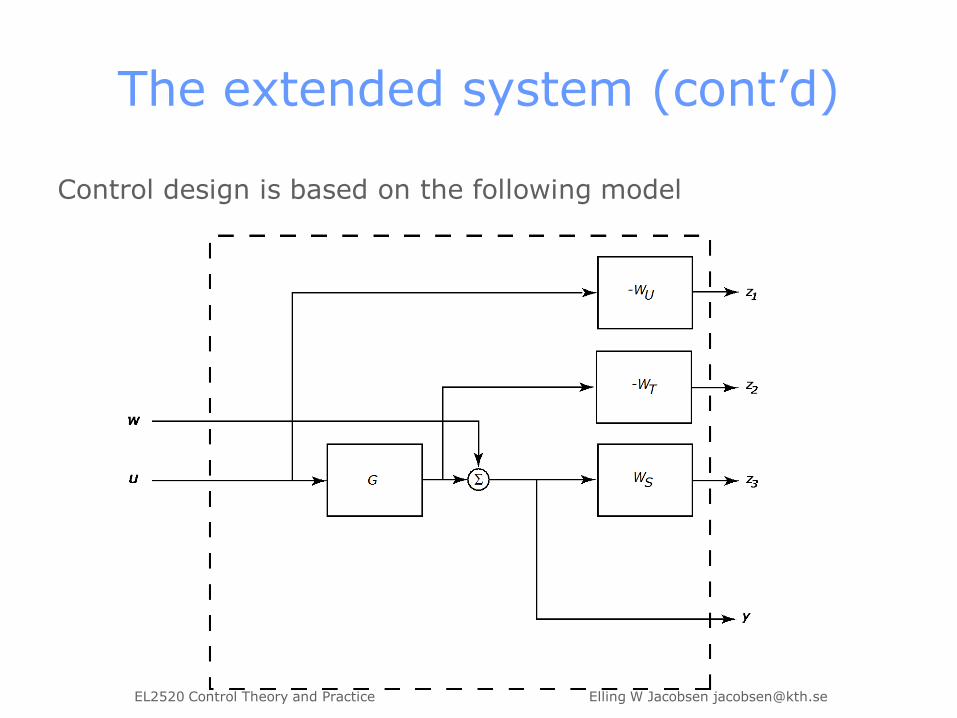
The extended system (cont’d)
Control design is based on the following model

EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
The control design problem
Find controller that minimizes (some) norm of closed-loop
system from w to z,
Model:
Assumption:
Note: Dynamics of weights WS, WT, WU part of system dynamics.

EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
H1 optimal control
Finding a controller that satisfies
can be done by solving a Riccati equation
with =1. If solution P satisfies P¸ 0, A-BBTP stable, the controller
fulfills the specifications (note: observer+state feedback)

EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
How to select weights
Useful to constrain weights, limit number of ”tuning knobs” in design
1. Start with scalar weights (only use matrix-weights when needed).Make sure weights are stable and minimum phase (why?)
2. Use simple weights with easy interpretation.
Ex.
3. Start shaping most important transfer matrix, then add one by one
Ex.
4. When channels are very different, use diagonal weights
EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
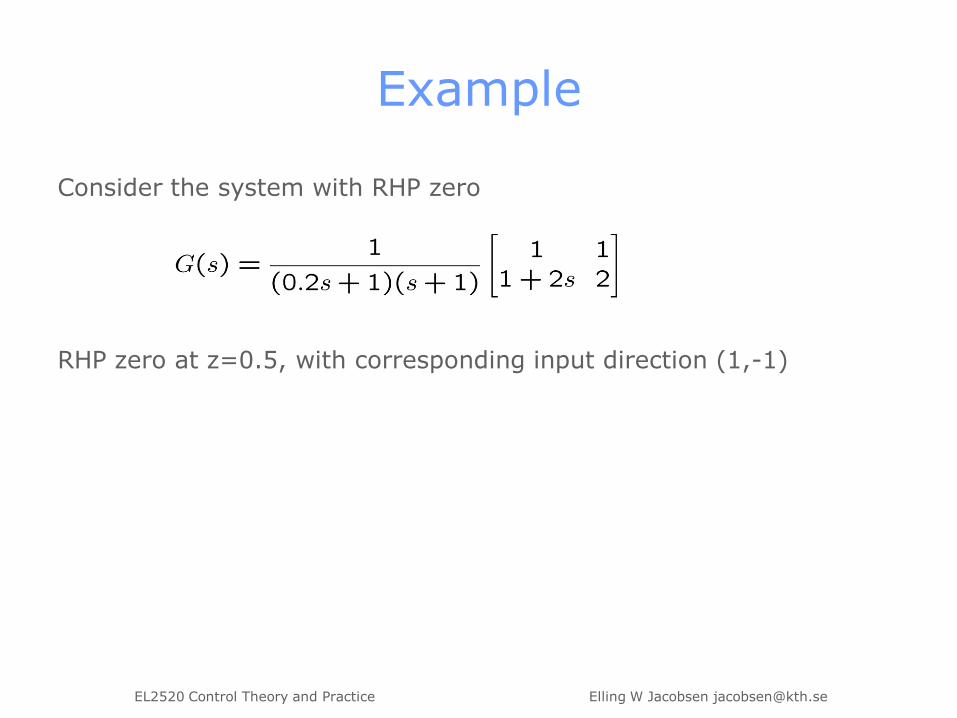
Example
Consider the system with RHP zero
RHP zero at z=0.5, with corresponding input direction (1,-1)

EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
A first design…
Since system has RHP zero at z=0.5, a reasonable weight is
The mixed sensitivity design achieves min=2.79.
Reasonable sensitivities, but poor time-domain performance.

EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
A second design…
Can shift bandwidth limitation from one channel to the other
(i.e. alter singular vectors; limitation on maximum singular value remains)
Time response on channel two much better, constraint on bandwidth
of maximum singular value of S still present.

EL2520 Control Theory and Practice Elling W Jacobsen [email protected]
Conclusions
More elements of multivariable system theory
• Multivariable frequency responses, gains, poles/zeros, directions
Key concepts from SISO analysis carry over
• fundamental limitations, robustness, loop shaping
Modern loop shaping
• Mixed sensitivity design: minimizing H1 norm of extended system
• Optimal solution is state-feedback plus observer
• Tuning knobs for design are weight functions
• Weight selection: part art, part science (must practice!)


















