Multi-UAV cooperation and control for load...
28
Journal of Intelligent and Robotic Systems manuscript No. (will be inserted by the editor) Multi-UAV cooperation and control for load transportation and deployment I. Maza · K. Kondak · M. Bernard · A. Ollero Received: date / Accepted: date Abstract This paper deals with the cooperation and control of multiple UAVs with sensing and ac- tuation capabilities. An architecture to perform cooperative missions with a multi-UAV platform is presented. The interactions between UAVs are not only information exchanges but also physical cou- plings required to cooperate in the joint transportation of a single load. Then, the paper also presents the control system for the transportation of a slung load by means of one or several helicopters. Experimental results of the load transportation system with one and three helicopters are shown. On the other hand, the UAVs considered in the platform can also deploy small objects, such as sensor nodes, on different locations if it is required. This feature along with the whole platform architecture are illustrated in the paper with a real multi-UAV mission for the deployment of sensor nodes to repair the connectivity of a wireless sensor network. Keywords multiple UAVs · multi-UAV load transportation · sensor deployment · multi-UAV distributed decision 1 Introduction The progress on miniaturization technologies, together with new sensors, embedded control systems and communication, have fuelled the development of many new small and relatively low cost Unmanned Aerial Vehicles (UAVs). However, constraints such as power consumption, weight and size plays an important role in UAVs, and particularly in small size, light and low cost UAVs. Then, the cooperation of many of these vehicles is the most suitable approach for many applications. A single powerful aerial vehicle equipped with a large array of different sensors of different modalities is limited at any one time to a This work was partially funded by the European Union AWARE Project (IST-2006-33579), the CONET Network of Excellence (INFSO-ICT-224053) and the ROBAIR Project of the Spanish Research and Development Program (DPI2008-03847). I. Maza · A. Ollero Robotics, Vision and Control Group, University of Seville, 41092 Seville (Spain) E-mail: [email protected],[email protected] K. Kondak · M. Bernard Technische Universit¨at Berlin, Einsteinufer 17, 10587 Berlin, E-mail: kondak, [email protected] A. Ollero Center for Advanced Aerospace Technology (CATEC), Seville (Spain) E-mail: [email protected] The original publication is available at www.springerlink.com in this link: http://dx.doi.org/10.1007/s10846-009-9352-8
Transcript of Multi-UAV cooperation and control for load...

Journal of Intelligent and Robotic Systems manuscript No.(will be inserted by the editor)
Multi-UAV cooperation and control for load transportation anddeployment
I. Maza · K. Kondak · M. Bernard · A. Ollero
Received: date / Accepted: date
Abstract This paper deals with the cooperation and control of multiple UAVs with sensing and ac-
tuation capabilities. An architecture to perform cooperative missions with a multi-UAV platform is
presented. The interactions between UAVs are not only information exchanges but also physical cou-
plings required to cooperate in the joint transportation of a single load. Then, the paper also presents the
control system for the transportation of a slung load by means of one or several helicopters. Experimental
results of the load transportation system with one and three helicopters are shown. On the other hand,
the UAVs considered in the platform can also deploy small objects, such as sensor nodes, on different
locations if it is required. This feature along with the whole platform architecture are illustrated in the
paper with a real multi-UAV mission for the deployment of sensor nodes to repair the connectivity of a
wireless sensor network.
Keywords multiple UAVs · multi-UAV load transportation · sensor deployment · multi-UAV
distributed decision
1 Introduction
The progress on miniaturization technologies, together with new sensors, embedded control systems and
communication, have fuelled the development of many new small and relatively low cost Unmanned Aerial
Vehicles (UAVs). However, constraints such as power consumption, weight and size plays an important
role in UAVs, and particularly in small size, light and low cost UAVs. Then, the cooperation of many
of these vehicles is the most suitable approach for many applications. A single powerful aerial vehicle
equipped with a large array of different sensors of different modalities is limited at any one time to a
This work was partially funded by the European Union AWARE Project (IST-2006-33579), the CONET Networkof Excellence (INFSO-ICT-224053) and the ROBAIR Project of the Spanish Research and Development Program(DPI2008-03847).
I. Maza · A. OlleroRobotics, Vision and Control Group, University of Seville, 41092 Seville (Spain)E-mail: [email protected],[email protected]
K. Kondak · M. BernardTechnische Universitat Berlin, Einsteinufer 17, 10587 Berlin,E-mail: kondak, [email protected]
A. OlleroCenter for Advanced Aerospace Technology (CATEC), Seville (Spain)E-mail: [email protected]
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

2
single view point. However, a team of aerial vehicles can simultaneously collect information from multiple
locations and exploit the information derived from multiple disparate points to build models that can be
used to take decisions. Team members can exchange sensor information, collaborate to track and identify
targets and perform detection and monitoring activities among other tasks [19]. Thus, for example, a
team of aerial vehicles can be used for exploration [16], detection, precise localization, monitoring and
measuring the evolution of natural disasters, such as forest fires. Furthermore, the multi-UAV approach
leads to redundant solutions offering greater fault tolerance and flexibility.
Unmanned aerial vehicles are mainly concerned with environment sensing and perception activities,
with limited ability to react against environment changes. The above mentioned surveillance and detec-
tion applications lie in this category. If the environment is considered known and static, or quasi static
with low dynamic behaviour when comparing with the UAVs motion, then the coordination problem
can be solved before the real-time execution of the mission. Then, the multi-UAV mission planning,
task allocation and trajectory generation could be done before the mission execution. However, envi-
ronment perturbations (e.g. in a disaster management scenario) or a lack of environmental data require
real-time coordination efforts. Furthermore, applications in non segregated aerial spaces where other
non-cooperative aircrafts may operate, also require collision detection and avoidance capabilities.
Other applications, such as tracking the motion of a mobile ground target, require the real-time
computation of the trajectory from environment perception, and, in general, the closing of real-time
control loops by means of environment perception in the aerial robot [20]. The same happens when
considering the monitoring of dynamic events such as forest fires. In this case, the application of real-
time coordination and cooperation methods is required.
However, notice that, up to now, in all the above mentioned applications, the aerial robots, as many
other mobile robots, are mainly considered as platforms for environment sensing. Then, the aerial robots
do not modify the state of the environment and there are no physical interactions between the UAV and
the environment. Furthermore, the interactions between the UAVs are essentially information exchanges,
without physical couplings between them.
This paper deals with the cooperation and control of multiple aerial robots with sensing and actuation
capabilities for the deployment of loads, and particularly, sensor nodes. Furthermore, the paper considers
the multi-UAV load transportation when an object is too heavy to be carried by one single UAV. The
latter requires the consideration of physical interactions between the aerial robots.
On the other hand, Wireless Sensor Network (WSN) technologies have experienced an important
development in the last ten years. Research work includes node mobility using robots and the navigation
of mobile robots by using wireless sensor network information (see survey in [1]). Connectivity is a main
issue in wireless sensor networks. Then, the application of robots for the deployment and connectivity
repair of wireless sensor networks has been also proposed. In [6] the application of an UAV for deployment
and connectivity repair of a wireless sensor network is proposed and demonstrated by using a single
autonomous helicopter. In this paper, the deployment and connectivity repair of a wireless sensor network
in a multi-UAV context is proposed and shown experimentally.
The transportation of a load by several ground robots has been an active subject of research and
development for many years. The coordinated control of the motion of the vehicles should consider the
involved forces. Thus, each robot could be controlled around a common compliance center attached to the
transported object. Under the assumption that each robot holds the object firmly, the real trajectories
of all of the robots are equal to the real trajectory of the object. Both centralized and decentralized
compliant motion control algorithms have been proposed, including the consideration of non-holonomic
constraints [14]. The method has been implemented in an experimental system with three tracked mobile
robots with a force sensor. In [23] the decentralized control of cooperating mobile manipulators is studied
with a designated lead robot being responsible for task planning. The control of each robot is decomposed
(mechanically decoupled) into the control of the gross trajectory and the control of the grasp. The
excessive forces due to robot positioning errors and odometry errors are accommodated by the compliant
arms. In [4] the Omnimate system which uses a compliant linkage platform between two differential drive
mobile robots is presented. In [9] distributed coordinated control of two rovers carrying a 2.5 meters long
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

3
mockup of a photovoltaic tent is presented and demonstrated as an example of the CAMPOUT behavior-
based control architecture.
The transportation of a single load by means of several helicopters has been also proposed in the
literature. In experiments with two manned helicopters it was determined that the piloting of two coupled
helicopters is a very challenging task, so at least, an automatic stabilization of the helicopters is required.
The motivation for using two or more small helicopters instead of one with bigger load capacity are:
– Like in the case of real manned transport helicopters, the costs for two small helicopters are often
less than for one with double load capacity.
– Whatever load capacity an existing helicopter has, there will be always a task where a higher load
capacity is required. In this case the control software could allow to couple existing helicopters in
order to form a system with sufficient load capacity.
Particularly, research on lifting and transportation of loads by means of two helicopters (twin lift)
was presented in e.g. [18,21]. However, this research work has been done only in simulation. In this
paper real flight experiments for load transportation with one and three helicopters are presented. We
describe an automatic control system which allows the usage of one or multiple small size helicopters for
slung load transportation. The number of helicopters should be configurable depending on helicopters’
capabilities and the load to be transported.
The research and developments presented in this paper have been conducted in the framework of the
AWARE project. The general objective of this project is the design, development and experimentation of
a platform providing the middleware and the functionalities required for the cooperation among UAVs
and a ground sensor-actuator wireless network, including mobile nodes. The platform will enable the
operation in sites with difficult access and without communication infrastructure. Then, the project
considers the self-deploying of the network by means of autonomous helicopters with the ability to
transport and deploy loads (communication equipment and nodes of the ground network).
This paper is organized as follows. Section 2 presents the multi-UAV distributed architecture de-
veloped for the AWARE platform, that allows different levels of cooperation and coordination among
the UAVs and between the UAVs and the environment, including both sensing and actuation. Section
3 is devoted to the transportation of a single load by means of multiple joined helicopters, and includes
experiments with one and three helicopters. Section 4 presents the multi-UAV deployment of multiple
loads and particularly the deployment of the sensor nodes of a wireless sensor network for connectivity
repairing. The last sections are devoted to the Conclusions and References.
2 Architecture for aerial robots cooperation in the AWARE platform
This section addresses specifically the architectural aspects linked to the necessary coordination and
cooperation issues induced by the operation of several AWARE subsystems, such as the aerial robots.
A global mission for the AWARE platform is specified by the user using the Human Machine Interface
(HMI) software. Each mission M will consist in a set of tasks (possibly ordered) that must be executed
by the platform. The task allocation process to the different UAVs could be done by the user or may be
autonomously performed in a distributed way. The latter might be necessary in situations where large
numbers of UAVs have to interact, where direct communication with a central station is not possible, or
where the local dynamics of the situation require timely reaction of the UAVs involved in it.
The tasks that will be executed by the AWARE platform involve coordination, mainly for sharing
space, and cooperation, for example for the surveillance at different altitudes or from different viewpoints
of the same object, or when an UAV plays the role of a radio re-transmitter from/to other UAVs and
the central station. Cooperation includes coordination, but there is role sharing between the subsystems
to achieve a global common task.
In the following, a general framework that addresses the operation of the AWARE multi-UAV plat-
form is described. Let us consider a team of UAVs that plan their motions according to a set of de-
centralized and cooperative rules R. In particular, we assume that the set R defines k possible tasks
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

4
T = τ1, τ2, . . . , τk that UAVs can perform, and specifies n logical conditions requiring a change of task
in the current plan. Let E = e1, e2, . . . , en be a set of discrete events associated with such conditions.
Each task has a set of m parameters Π = π1, π2, . . . , πm defining its particular characteristics.
Aerial robotic systems composed of a physical plant and a decisional and control system implementing
such kind of cooperation rules R can be modeled as hybrid systems [8,5,15]. The general components
of a simplified hybrid model H are explained in the following. Let qi ∈ Q be a vector describing the
state of the i-th UAV in the configuration space Q, and let τ ∈ T be the task that the UAV is currently
executing. The i-th UAV’s configuration qi has a continuous dynamics
qi = f(qi, ci, γi), (1)
where ci ∈ C are control inputs and γi ∈ Γ models the influence of the possible physical coupling
with other UAVs and transported objects.
The i-th UAV’s current task has a discrete dynamics δ : T × E → T , i.e.
τ+ = δ(τ, e), (2)
where e ∈ E is an event (internal or external) requiring a change of task from τ to τ+, both from
the set of tasks T .
Event activation is generated by
e = A(qi, ε, X, µ), (3)
where ε represents the internal events (such as changes in the execution states of the tasks), X is a
vector with information about external events in the environment and µ is a vector µ = (µ1, µ2, . . . , µNm)
containing the messages coming from Nm UAVs cooperating with the i-th UAV. Those messages are
used for example in the negotiation processes involved in the intentional cooperation mechanisms and
are generated in each robot by a decisional module D. This module encompasses high level reasoning and
planning, synchronization among different robots, negotiation protocols for task allocation and conflict
resolution purposes, task management and supervision, complex task decomposition, etc.
In the following section, the particular details of the architecture adopted for the AWARE multi-UAV
platform are described.
2.1 Architecture
The main objective in the design of the architecture was to impose few requirements to the execution
capabilities of the autonomous vehicles to be integrated in the platform. Basically, those vehicles should
be able to move to a given location and activate their payload when required. Then, autonomous vehicles
from different manufacturers and research groups can be integrated in the AWARE architecture easily.
The global picture of the AWARE distributed UAV system is shown in Fig. 1. In each UAV, there
are two main layers: the On-board Deliberative Layer (ODL) and the proprietary Executive Layer. The
former deals with high-level distributed decision-making whereas the latter is in charge of the execution
of the tasks. In the interface between both layers, the ODL sends task requests and receives the execution
state of each task and the UAV state. For distributed decision-making purposes, interactions among the
ODLs of different UAVs are required. Finally, the HMI software allows the user to specify the missions
and tasks to be executed by the platform, and also to monitor the execution state of the tasks and the
status of the different sub-systems of AWARE.
A more detailed view of the Deliberative Layer architecture is shown in Fig. 2. As it has been
mentioned above, the ODL has interactions with its executive layer and with the ODL of other UAVs as
well as with the HMI. The different modules shown in the ODL supports the distributed decision-making
process involving cooperation and coordination. After presenting the task model in the next section, the
operation of each module will be detailed.
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

5
Fig. 1 Global overview of the distributed UAV system architecture.
Fig. 2 Detailed view of the internal On-board Deliberative Layer (ODL) architecture.
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

6
2.2 Task model
Let us consider a mission M specified by the AWARE platform user. This mission is decomposed (au-
tonomously or manually) in a set of partially ordered tasks T . Those tasks can be allocated to the UAVs
manually from the HMI or autonomously in a distributed way (see Sect. 2.5). Let us define a task with
unique identifier k and type λk allocated to an UAV i as τ ik = (λk,−Ωk, Ω+
k , εk, Πk), where −Ωk and
Ω+k are respectively the set of preconditions and postconditions of the task, and εk is the event associated
to the task evolution (see Table 1). Finally, Πk = π1k, π2
k, . . . , πmk is the set of m parameters which
characterizes the task. As an example, see Table 2, which shows the parameters considered in a task
consisting in covering a given area for surveillance.
Table 1 Possible events considered in the status evolution of a task τ ik.
Event (εk) DescriptionEMPTY No task
SCHEDULED The task is waiting to be executedRUNNING The task is in executionCHECKING The task is being checked against inconsistencies and static
obstaclesMERGING The task is in the plan merging process to avoid conflicts with
the trajectories of other UAVsABORTING The task is in process to be aborted. If it is finally aborted, the
status will change to ABORTED, and otherwise will return toRUNNING.
ABORTED The task has been aborted (the human operator has abortedit or the UAV was not able to accomplish the task properly)
ENDED The task has been accomplished properly
Table 2 Parameters of a task with type λk = SURV.
Parameters (Πk) Descriptionπ1 (Polygon) The set of vertices defining the polygon
of the area to be covered by the UAVπ2(Altitude) Altitude (m) ellipsoid-based datum
WGS84 for the flightπ3(Speed) Desired speed (m/s) for the flight
Regarding the type of task (λk) at the ODL level of the architecture, the list shown in Table 3 has
been considered in the AWARE platform.
On the other hand, preconditions and postconditions are event-based mechanisms that can deal with
events related to the evolution of the tasks states (see Table 1), to the reception of messages, to the
detection of a given event by the Perception System (see Sect. 2.8), the elapsing of a certain time period,
etc. Then, the execution of a task starts when all the associated preconditions are satisfied. On the other
hand, it is also possible to specify postconditions, i.e. conditions which satisfaction triggers the abortion
of a task. If a task does not have any precondition or postcondition, then τ ik = (λk,−Ωk = ∅, Ω+
k =
∅, εk, Πk).
An example of a precondition or a postcondition related to the evolution of the tasks is the “end
of task” event of a different task. Furthermore, thanks to the synchronization manager module (see
Sect. 2.3), it is possible to specify preconditions between tasks of different UAVs. Finally, it should be
mentioned that perception events (not related to the execution of a task) such as the detection of a fire
or a fireman in a disaster scenario, could be also the precondition of a task (i.e. a tracking task).
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

7
Table 3 Several type of tasks (λk) considered at the ODL level.
Type of task (λk) DescriptionTAKE-OFF The UAV takes off and stabilizes at a default safe height, then
switches to a secured wait mode, waiting for further instruc-tions.
LAND The UAV starts landing procedures, lands, and is set to aground secured mode.
GOTO The UAV moves from its current location to a point P (or toits vicinity).
GOTOLIST The UAV moves from its current location to each of the pointsof the waypoints list, following the order of the points.
WAIT The UAV is set to a secured waiting mode: hover or pseudo-hover, during a given period.
SURV The UAV covers a given area defined by a polygon at a certainaltitude.
DETECT The perception system of the UAV starts to operate in detec-tion mode, providing an alert if a given event in the environ-ment (fire, persons, etc.) appears.
TRACK The perception system of the UAV starts to operate in track-ing mode, providing (if possible) estimations of a given eventlocation (fire, persons, etc.). The UAV moves accordingly tofollow the event.
HOME The UAV is commanded to return home.
The ODL processes the tasks received and generates simpler tasks, called elementary tasks, that are
finally sent to the executive layer of the UAV. Let us define an elementary task with unique identifier k
and type λk allocated to the i-th UAV as τ ik = (λk, Πk, εk) where Πk = π1
k, π2k, . . . , πm
k is the set of
m parameters which characterizes the elementary task and εk is the event associated to the elementary
task evolution. It should be mentioned that RUNNING and ENDED are the only events considered for the
elementary tasks. On the other hand, as an example, Table 4 shows the seven parameters that are
considered in an elementary task consisting in visiting a given location.
Table 4 Elementary task with type λ = GOTO: list of parameters.
Parameters (Π) Descriptionπ1(Latitude) Latitude ellipsoid-based datum WGS84
π2(Longitude) Longitude ellipsoid-based datum WGS84π3(Altitude) Altitude (m) ellipsoid-based datum WGS84π4 (Speed) Desired speed (m/s) along the way to the waypoint
π5(Force heading) 1: force to the specified heading, 0: Not forceπ6(Heading) Desired heading (degree) along the way (N is 0 , E is
90 , W is −90 and S is 180 )π7(Payload) 1: to activate the payload around the location of the
waypoint, 0: not to activate
Then, the vehicles to be integrated in the AWARE platform should be able to receive elementary
tasks, report their associated execution events and execute them. A small set of elementary tasks have
been considered in order to allow the integration of a broader number of vehicles from different manu-
facturers and research groups. Basically, those vehicles should be able to move to a given location and
activate their payload when required.
In the next section, the module in charge of the management of the tasks following the model
presented above is described.
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

8
2.3 Task and synchronization managers
The task manager module (see Fig. 2) receives the planned tasks from the plan builder module. Those
tasks can have preconditions and/or postconditions and the task model assumed is based on elementary
events processing, which are expected to occur whenever the states of the tasks and the environment
evolve. The starting event is the only controllable event: all other kind of events related to a task are
contingent, i.e. the system can neither guarantee that such an event will occur nor when exactly it may
occur.
In each task request for the task manager, the operation to be applied should be one of the following
two alternatives:
– Dynamic task insertion (INSERT operation): this allows to request tasks insertion in the UAV’s cur-
rent plan, according to the relative order specified for the newly inserted task, versus the current
partial order of the tasks already scheduled. It allows to insert a task with preconditions and/or
postconditions.
Preconditions can be specified either as mandatory or optional. If it is mandatory and the precon-
dition happens not to be satisfiable anymore, then the task is aborted. On the contrary, if it is
specified as optional, the precondition is considered as satisfied (and hence removed from the task’s
list of preconditions) if it is actually satisfied or if its own satisfiability becomes unsatisfiable (and
in this case the task is not aborted). An example of task precondition is the “end of task” event of
a different task.
On the other hand, it is also possible to specify postconditions, i.e. conditions which satisfaction
triggers the abortion of a task. For example, it allows to interrupt a given task when another one is
achieved: during a surveillance task, once a sequence of waypoints covering an area have been visited,
we might want to interrupt also the DETECT task being carried out by the Perception Sub-System
(PSS) on-board.
– Dynamic task abortion (ABORT operation): this mechanism allows to dynamically request task abor-
tion in the current plan, while the plan is being executed. If the task is already running, then the
abortion of the task is an interruption. If the task is not yet running, then the abortion is a cancella-
tion (the task is de-scheduled). The abortion triggers a propagation mechanisms, that checks which
of the scheduled tasks depends on the aborted task (i.e. the tasks having a precondition expecting an
event from the aborted task, like an “end of task” event): if the dependence is a mandatory precon-
dition, then this task is also aborted and so on. If it is an optional precondition, then the dependence
is removed as if the precondition was satisfied, and the corresponding task is not aborted.
On the other hand, the task manager also interfaces with the executive layer of the UAV. It sends
elementary tasks to the executive, which reports the state of both those tasks and the UAV itself.
The management of the preconditions and postconditions is carried out together with the task
synchronization module. In the interface between both, there is a simple protocol based on messages.
The synchronization manager is in charge of keeping the dependencies coherent among the different tasks
in the current plan of the UAV, and also with the tasks of other UAVs.
When a new task request with preconditions and/or postconditions arrives to the task manager
module, it sends a REPORT_DEPS message with the dependencies to the synchronization manager, which
saves it in a local database.
The synchronization manager is always checking the state of the tasks in the distributed UAV system
and, if there is any change, it updates the dependencies database. For instance, if a given task changes
its status to ENDED and if this event is precondition for other tasks, those preconditions are changed to
satisfied. On the other hand, if all the postconditions of a task are satisfied, an INFO message is sent to
the task manager module that will proceed with the corresponding task abortion.
Before requesting an elementary task to the executive layer, the task manager sends a QUERY message
with the sequence number of the task to the synchronization manager. The satisfiability is checked and
the answer is sent back with an INFO message. If all the preconditions are not satisfied, the task manager
will ask again periodically.
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

9
2.4 Plan builder / optimizer
In the plan building stage of the AWARE platform, there are two different possibilities:
– Offline planning: previous to the mission execution, the AWARE platform user can plan a mission
to tune its parameters and check its feasibility using the EUROPA framework developed at NASA’s
Ames Research Center.
– Online planning: it is based on a plan builder / optimizer module integrated in the ODL architecture
(see Fig. 2) and programmed to solve the specific planning problems of the UAVs in the AWARE
platform.
Both options are described in the next subsections.
2.4.1 Plan builder / optimizer: offline planning
The EUROPA framework developed at NASA’s Ames Research Center is available under NASA’s open
source agreement (NOSA) since 2007. NOSA is an OSI-approved software license accepted as open source
but not free software. EUROPA (Extensible Universal Remote Operations Planning Architecture) is a
class library and tool set for building planners (and/or schedulers) within a Constraint-based Tempo-
ral Planning paradigm and it is typically embedded in a host application. Constraint-based Temporal
Planning (and Scheduling) is a paradigm of planning based on an explicit notion of time and a deep com-
mitment to a constraint-based formulation of planning problems. This paradigm has been successfully
applied in a wide range of practical planning problems and has a legacy of success in NASA applications.
As a simple application example in the AWARE project context, a deployment mission for an au-
tonomous helicopter will be considered in the following. EUROPA is used offline before the mission
execution to tune the parameters of the tasks and test its feasibility. The particular application domain
model and problem definition has to be provided to the planner, which will generate a plan to solve
the problem. In our example, the main entity application domain is the helicopter. The next decision is
to identify the entities that will describe changes in the state of the helicopter as it moves around the
environment performing a mission. Each entity is called a timeline in the EUROPA framework. Then,
the following stage is to identify the states (called predicates) in which each timeline can be. Figure 3
shows the set of predicates identified on each timeline along with the variables in each state.
Analyzing the components of the helicopter produces the following breakdown of timelines (see Fig.
3) and states:
Navigator: controls the motion of the helicopter between locations and hovers at a location. States: The
helicopter can be hovering at a location or going between locations.
Instrument: controls the instrument for dropping sensor nodes. States: the instrument can be on or off.
Commands: manages instructions from the HMI and checks the communication link after dropping a
node. States: the helicopter can be instructed to drop a node and has to check the communication
link in order to evaluate if the sensor network connectivity is repaired.
Then, the application domain description is encoded in NDDL (an acronym for New Domain De-
scription Language) along with its initial state. The locations of the waypoints where the sensor nodes
should be dropped, the initial location and battery level of the UAV and the different paths (with their
associated costs computed by the plan refining toolbox) between the locations of interest are specified.
Finally, let consider that the goal of the mission is to deploy three sensor nodes in different waypoints:
– wp1 at time 30.
– wp4 at time 60.
– wp3 at time 90.
It can be also easily encoded in NDDL in the following way:
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

10
Fig. 3 Timelines and Predicates with Transitions between Predicates on each Timeline.
goal(Commands.DropNode drop_node_1); drop_node_1.start.specify(30);
drop_node_1.wp.specify(wp1);
goal(Commands.DropNode drop_node_2); drop_node_2.start.specify(60);
drop_node_2.wp.specify(wp4);
goal(Commands.DropNode drop_node_0); drop_node_0.start.specify(90);
drop_node_0.wp.specify(wp3);
With the model and the initial state specified, the planner can be started to compute the solution.
Figure 4 shows a screenshot with the visualization of the results obtained with PlanWorks.
From the solution obtained, the AWARE platform user can check the feasibility of the mission and
tune its parameters properly.
2.4.2 Plan builder/optimizer: online planning
In general, the plan builder/optimizer module running during the mission execution generates a plan
P as a set of partially ordered tasks. In the AWARE platform, the main function of the online planner
will consist in ordering the motion tasks allocated to the UAV. Let us consider the i-th UAV with a set
of nm motion tasks to be executed. The planner will compute the order of the tasks τ ik/k = 1 . . . nm
that minimizes the execution cost:
Ci =
nm−1∑
k=1
cik,k+1 (4)
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

11
Fig. 4 Screenshot with the visualization of the results obtained with PlanWorks.
where cik,k+1 is the motion cost between the locations associated to the tasks τ i
k and τ ik+1. This
problem is an instance of the Travelling Salesmen Problem, often referred as TSP, which is NP-hard. The
simplest exact algorithm to solve it is based on a brute force search that tries all the ordered combinations
of tasks. The running time for this approach lies within a polynomial factor of O((nm − 1)!), so this
solution is only feasible when a small number of tasks are allocated to the UAVs, which is the case in
most of the AWARE platform missions.
But, if the user delegates the allocation process of tasks to the ODLs, each UAV will have to run
many times the planning algorithm during the autonomous negotiation with other UAVs. Then, when
the autonomous distributed allocation is launched, another algorithm with a lower computational cost
is required. Each time a new task is received, the plan builder runs an algorithm that inserts the new
task in all the possible and feasible locations in the current plan and chooses the order with lowest plan
cost.
In the next Section, the module driving the autonomous distributed task allocation process is de-
scribed.
2.5 CNP manager
The CNP manager module (see Fig. 2) operation is based on the Contract Net Protocol [22] and it
manages the distributed task allocation process among the different UAVs.
The multi-robot task allocation (MRTA) problem has become a key research topic in the field of
distributed multirobot coordination in recent years. In the AWARE project, three algorithms (SIT, SET
and S+T) have been developed and implemented to solve the distributed task allocation problem among
the UAVs in the platform. All of them apply a market-based approach in which the UAVs consider their
local plans when bidding and multiple tasks can be allocated to a single UAV during the negotiation
process. The second one (SET) is based on the negotiation of subset of tasks and can be considered as a
generalization of the former (SIT), which only negotiates single tasks. Both algorithms have been tested
in simulation with good results in multiple missions involving the execution of random GOTO tasks [25].
The latter algorithm (S+T) solves the MRTA problem in applications that require the cooperation
among the UAVs to accomplish all the tasks. If an UAV cannot execute a task by itself, it asks for
help and, if possible, another UAV will provide the required service. In the AWARE platform, tasks
such as surveillance, that could involve transmitting data in real-time to a given location are considered.
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

12
For those tasks, communication relay services could be required if the communication range of a single
UAV is not enough. On the other hand, the parameters of the S+T algorithm can be adapted to give
priority to either the execution time or the energy consumption in the mission. The potential generation
of deadlocks associated to the relation between tasks and services have been studied and a distributed
algorithm that prevents them have been also implemented [26].
In the following, the SIT algorithm used during the mission execution described in Section 4 is
detailed.
2.5.1 Dynamic Single Task Negotiations With Multiple Allocations To A Single Robot (SIT)
As our goal was to find solutions close to the global optimum (minimize the sum of all the individual costs
assuming independent tasks), the approach presented in [7] was taken as a starting point. In the same
manner, robots with a local plan and multiple tasks allocated to a single robot during the negotiation
were considered. But in the implementation of the SIT algorithm, several differences with the work in
[7] can be pointed out: revenues are not used, a different synchronization method is applied and there is
an agent acting as an entry point for the tasks.
In the negotiation process, each UAV bids for a task with the cost of inserting this task in its local
plan (marginal cost). Let us assume that the i-th UAV has a local plan Pi consisting in a set of n ordered
tasks τ1, τ2, . . . , τn with cost Ci and receives a new task. If this task is inserted at the position j in the
plan Pi, then a new plan Pi(τj) with cost Ci(τj) is generated. In that case, the associated marginal cost
µj is given by:
µj = Ci(τj)− Ci (5)
The plan builder module of each UAV will compute the optimal insertion point of the new task in its
current plan. Taking into account the local plan of each UAV in the negotiation leads to better solutions
as it will be shown later.
The SIT algorithm is based on two different roles played dynamically by the UAVs: auctioneer and
bidders. In each auction there is only one auctioneer which is the UAV that has the token. The auction
is opened for a period of time and all the bids received within it are considered. When the auction
is finished and the task allocated, the auctioneer considers to pass the token to another UAV. If that
happens, the auctioneer changes its role to a bidder role and the UAV with the token becomes the new
auctioneer. These basic steps of the algorithms executed by the auctioneer and the bidders are given
in Algorithms 1 and 2. In Algorithm 1, the best bid collected by the auctioneer is increased by a given
percentage (usually 1%) to avoid transactions that will not significantly improve the solution.
Algorithm 1 SIT auctioneer algorithm
if there is any task to announce thenannounce taskwhile timer is running do
receive bidsend whilecalculate best bidif best bid is smaller than the auctioneer bid then
send task to best bidderend ifdelete task from announcement list
end if
The main difference with the basic CNP protocol is that the bid of each UAV depends on its current
plan and every time the local plan changes, the negotiation continues until no bids improve the current
global allocation. When the initial negotiation is over, the mission execution can start, but new tasks
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

13
Algorithm 2 SIT bidder algorithm
a new message is receivedif new message is a task announcement then
calculate the optimal position of the task in the local plancalculate bid (marginal cost)send bid to the auctioneer
else if new message is a task award theninsert task in the local plan in the position calculated beforeintroduce task in announcement list
end if
can be generated at any moment. Therefore, the negotiation is dynamic in the sense that new tasks are
handled also during the mission execution. All the UAVs take part in the negotiation of those new tasks
with the only restriction that the current tasks in execution are not re-negotiated.
The SIT algorithm has been tested in multi-UAV missions consisting in visiting waypoints and
returning to the home location. In this case, the local plan cost for an UAV i visiting a set of nw ordered
waypoints P1, P2, . . . , Pnw can be expressed as:
Ci = d(P (xi), P1) +
nw∑
l=2
d(Pl−1, Pl) + d(Pnw , P (hi)), (6)
where P (xi) are coordinates corresponding to the current state of the i-th UAV, P (hi) is its home
location and d(A, B) is the Euclidean distance between the points A and B. In this particular missions,
each UAV should build its own local plan visiting the waypoints in an order that minimizes the total
distance travelled. This problem is equivalent to the TSP problem which is a well known NP-hard
problem. In our implementation, a greedy approach has been applied to solve it, inserting the new task
in the position which minimizes its insertion cost.
Hundreds of simulations with different number of UAVs and waypoints have been run to compare the
SIT algorithm with the global optimal solution. Additionally, another algorithm has been implemented
in order to evaluate the relevance of the local plans computed by the plan builder module in the quality of
the solutions. This second algorithm, that will be called NoP (No local Plan), uses a basic CNP protocol
where UAVs only participate in the auction when they are idle. Furthermore, a brute force algorithm has
been used to compute the global optimal solutions when the sum of UAVs and tasks is below a certain
value.
In particular, for each given number of UAVs and waypoints, one hundred missions have been run
in a virtual scenario of 1000x1000 meters using random positions for the UAVs and the waypoints.
Each mission has been simulated with the two algorithms implemented and Table 5 shows the different
solutions compared with the global optimum. In each cell the first number is the arithmetic mean of the
global cost for the 100 random missions, the value between brackets is its standard deviation (in meters)
and the third number is the difference in percentage with the optimal solution. The global cost is given
by the sum of the individual costs of the UAVs.
From the results, it should be noted that using a local plan during the auction process improves
the solutions significantly. On the other hand, the SIT algorithm achieves very good results, with a
maximum difference of 4.7% w.r.t. the optimal solution. Also, it is important to point out that the
standard deviation values are high because missions are calculated at random, i.e., the global cost of the
different random missions can differ very much among them.
2.6 Plan merging module
When considering the different plans of the UAVs, the main resource they share is the airspace. Therefore,
a plan merging module (see Fig. 2) has been included in the architecture to detect potential conflicts
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

14
UAVs Tasks NoP SIT Optimum3 3 2371, 22
(742, 4)65, 18%
1453, 44(369, 63)1, 25%
1435, 4(362, 36)
3 5 4144, 7(923, 42)101, 23%
2097, 83(414, 52)1, 74%
2061, 8(396, 3)
3 7 5073, 2(788, 75)114, 73%
2473, 65(385, 46)4, 7%
2362, 6(335, 81)
3 9 6070, 8(850, 46)129, 13%
2816, 59(398, 16)6, 3%
2649, 5(332, 58)
5 3 1764, 36(627, 87)39, 49%
1274, 88(365, 74)0, 79%
1264, 78(356, 04)
5 5 3808, 55(921, 45)112, 37%
1842, 96(363, 62)2, 76%
1793, 35(337, 56)
5 7 5407, 59(1238, 38)150, 15%
2225, 67(384, 74)2, 96%
2161, 68(365, 82)
Table 5 Solutions computed with the distributed task allocation algorithms implemented and the optimal result.The first number is the arithmetic mean of the global cost, the value between brackets is its standard deviation(both values in meters) and the third number is the difference in % with the optimal solution.
among the different trajectories and also to follow a policy in order to avoid them. Then, this module
has to interact with the plan builder module and also with other UAVs to interchange the different 4D
trajectories.
A distributed collision avoidance method (see Algorithm 3) for the helicopters of the AWARE plat-
form has been designed and implemented. The method is based on the hovering capabilities of the
helicopters and guarantees that each trajectory to be followed by the UAVs is clear of other UAVs before
proceeding to the execution.
This algorithm has been applied in the execution of the mission described in Section 4.
2.7 Plan refining toolbox
The plan refining toolbox (see Fig. 2) provides services to the plan builder module and can also interact
with the Perception Sub-System (see Sect. 2.8) depending on the UAV mission.
The main services provided are:
– Task decomposition rules.
– Path planning algorithms to avoid static obstacles.
– Task and mission costs computations for the planner module.
Those services are based on the decomposition of the tasks received by the ODL into an ordered set
of elementary tasks. Then, once a task τ ik = (λk,−Ωk, Ω+
k , εk, Πk) is received, it is processed following
a set of decomposition rules D and an associated set of ne elementary ordered tasks 1τ ik,2 τ i
k, . . . ,ne τ ik
is obtained. This set of tasks inherits as a whole, the preconditions −Ωk and postconditions Ω+k from
the task τ ik.
In the AWARE platform, there are several predefined decomposition rules D for the different possible
tasks. For example, for a surveillance task, consisting in covering a given area defined by a polygon at a
certain altitude, an algorithm based in [16] is applied to decompose it into elementary GOTO tasks:
τ ik = (λk = SURV,−Ωk, Ω+
k , εk, Πk) −→ j τ ik = (λk = GOTO, εk, Πk)/j = 1 . . . ne (7)
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

15
Algorithm 3 Distributed collision avoidance algorithm running in the i-th UAV
while (true) doa new message is received from UAV jif new message is a path clearance (∆j) request with timestamp then
if a task is running with path ∆i thenif there is no conflict between paths ∆i and ∆j then
send a path grant ∆j message to UAV jelse if then
add the new request to the list of pending path clearance requestsend if
elseif there is no conflict between current UAV i location and path ∆j then
send a path grant ∆j message to UAV jelse if then
add the new request to the list of pending path clearance requestsend if
end ifelse if new message is a ∆k path grant message AND elementary task τk is ready to be executed then
if ∆k path grant messages have been received from all the UAVs thenexecute corresponding GOTO elementary task τk
else if then∆k path grant messages counter is increased
end ifend ifcheck again the clearance state of the pending path requests previously received
end while
2.8 Perception subsystem (PSS) module
The main purpose of the Perception System (PS) of the AWARE platform is to build and update a con-
sistent representation of the environment. A fully distributed probabilistic framework has been developed
in order to achieve detection and tracking of events using the sensors provided by the AWARE platform:
visual and infrared images from UAVs and ground cameras, scalar measures like temperature, humidity,
CO or node signal strength from the sensor nodes of the WSN. It allows reducing the network bandwidth
requirements on data transmission and dividing the processing load among different computers. As a
result, the scalability of the whole system will be improved. In addition, the ability of separately process
the information increases the robustness of the architecture.
Then, the whole PS system is divided in several software instances called perception sub-systems
(PSS) modules, each attached to an AWARE platform element with perception capabilities. Then, there
are PSS modules for the UAVs with cameras on-board (see Fig. 2), ground cameras, and the wireless
sensor network (WSN). Each of them processes locally the environment information (images, sensors,
...) in order to reduce the amount of data transferred through the network. All the PSSs share their
beliefs about specific events. The variety of events to be detected and tracked by the PSS is large but a
common representation based on a probabilistic representation has been considered [24,17]. The events
are related with the real world by means of their position and velocity in a global coordinate frame.
This information is always accompanied by the error estimation represented as an information matrix.
In order to disambiguate among different events located in the same place (or close), general information
about the event is also included: mean color, histogram, intensity and received signal strength indication
(RSSI) when available. Finally, in order to fuse the different estimations, an Information Filter has been
applied due to its properties for distributed implementation.
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

16
3 Multi-UAV load deployment
The transportation of loads by a single UAV is strongly limited by the payload constraint of the UAV.
Then, when using small UAVs, this constraint may preclude the transportation and deployment of
communication equipment or loads required for the application, as for example first aid supplies required
for victims in search and rescue operations. The system designed in the AWARE project allows the
transportation of a single load by means of several helicopters. The number of helicopters is configurable
depending on helicopters capabilities and the load to be transported. The multi-UAV cooperation in
the load transportation task is characterized by the physical coupling between the members of the
team. Then, the individuals are connected by physical links transmitted through the common load. The
dynamic behaviour of the state variables qi of the i-th helicopter is given by equation (1).
In terms of motion planning and collision avoidance, all the members of the team and the load can be
considered as a single entity. Let τ be the task being executed by this single entity, such as for example
GOTO or GOTOLIST in the above section. Then, the control law can be expressed as
ci = g(qi, qi, τ), (8)
In general the control law ui applied to each helicopter depends not only on qi but also of the state
variables qi of the other Nc helicopters linked to the load. However, as will be shown in this section, in
some cases the problem can be decoupled.
3.1 Modeling
The model of a small size helicopter is a key component for behavior description of the whole system
composed of one or several helicopters coupled to a load by means of ropes. Here we use the model
presented in our previous work [12,13]. The small size model helicopter shows some specific effects which
are not presented or are negligible small in case of the full-size helicopter and vice versa. For that reason,
it is impossible to use the models derived for full-size helicopters (see e.g. [10]) without any adaptation.
As it was pointed out in our previous work the main differences between model and full size helicopters
in respect of modeling and control are:
– a model helicopter has a much higher ratio of the main rotor mass to the fuselage mass
– the main rotor rotation speed of a model helicopter is higher compared to most full-size helicopters
– a very stiff main rotor without flapping hinges (for almost all commercially available helicopters)
Due to these differences, the inertial effects of the main rotor make a significant contribution to the
rotational dynamics of the system and can not be neglected. Therefore, the mechanical model should be
considered as composed of two rigid bodies: the main rotor and the fuselage. For the considered class of
model helicopters, the dominant component is the main rotor and not the fuselage. Unfortunately, the
main rotor is very often neglected in papers related to modeling and control of small-size helicopters and
only one rigid body – the fuselage – is accounted for in the dynamical equations.
The complete model of a model helicopter is composed of two main components: the mechanical
model and the model for generation of aerodynamic forces and torques. From experimental results
with helicopters we concluded that the generation of aerodynamic forces and torques, at least for the
considered class of helicopters, can be approximated with simple algebraic relations (corresponding time
delay should be taken into account). Therefore, the dynamics of one small-size helicopter or of a system
composed of several coupled helicopters are mostly determined by its mechanical model. The lifting
forces FMR3 and torques TMR
1,2 generated by the main rotor of each helicopter, see Fig. 5, and the forces
FTR2 generated by the tail rotors will be considered as abstract control inputs c in the above equation.
The important issue for the control of a helicopter coupled to a load is illustrated in Fig. 5. The
mechanical model of the helicopter is composed of two rigid bodies: the fuselage F and the spinning
main rotor MR. The load, denoted as mass point cmL, is connected to the helicopters fuselage by means
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

17
1n
3n
2n no
MR
F
N
_r
cm
p
1f
3f
2f
3
MRF
1
MRT2
MRT3
MRT
MRcmcm
Fcm
r
Lcm
rF
Fig. 5 Mechanical model of the helicopter connected to the load
of a rope in the point r. The motion of the whole system is considered in respect to a Newtonian frame
N . The points cmF , cmMR and cm are the center of mass (CoM) of the fuselage, of the main rotor
and of the complete helicopter respectively. For a real system it is difficult to place the point r at the
helicopter CoM cm, so the vector pr−cm connecting these two point is not zero and the rope force Fr
causes a non zero torque Tr = Fr × pr−cm on the helicopter fuselage F . As we have shown in [12,
13] the rotation dynamics of the helicopter modeled as two rigid bodies is quite complicated, but is not
coupled with the translation dynamics which means that equations for rotational dynamics depend only
on generalized speeds describing the rotation of the helicopter. Because the lifting force FMR3 generated
by the main rotor is approximately perpendicular to the main rotor plane or to the fuselage plane f1− f2,
the translational accelerations are always given by the absolute value of FMR3 and the orientation of the
helicopter. Therefore, the relationship between rotation and translation dynamics for a single helicopter
can be expressed as follows: rotation ⇒ translation.
In the case where one or several helicopters are connected by means of rope to a load, the rope force
Fr and, therefore, an additional torque Tr acts on the fuselage of the helicopter. This torque depends
on orientation of the helicopter and its translational motion in the frame N (e.g. if helicopter and load
are in free fall, Fr and Tr are zero). Here we have a more complicated relationship between rotation
and translation dynamics for each helicopter: rotation ⇔ translation. If several helicopters are connected
to the load, the translational and rotational motion of one particular helicopter has direct influence on
the rotational dynamics of all other helicopters in the compound. Even the translation with constant
acceleration, e.g. to the right in the Fig. 5, can cause oscillation of the angle θ between the rope and the
helicopter axis. Then, the coupling in equation (1) can be expressed as
γi = h(qi,pqi,
p ˙qi), (9)
with vector pqi = (qi1 , qi2 , . . . , qiNc) containing the configurations of the Nc neighbors physically
connected to the i-th helicopter.
The strong mutual coupling between rotation and translation makes the usage of an orientation
controller, which was designed for a single helicopter, problematic (even if the techniques for robust
control design were used). Please note that in many practical cases the absolute value of torque Tr is
similar or even larger than the values of torques needed to control the rotation of a single helicopter
without the rope.
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

18
*
1,2iq
3
MR
iF
1,2
MR
iT
oriR
system:
helis+
load
1 Ftrans
RiF
-
*( )x t
( )x t
Fig. 6 General control scheme for control of coupled helicopters
For modeling we consider the general case where n helicopters are connected to one load. To get
the dynamical equations of motion we used the Kane-method, see e.g. [11], which allows to generate
the equations for systems with an arbitrary number of helicopters. The coupling between equations for
different helicopters is established by adding of one motion constraint (the length of the rope does not
change during the time) for each helicopter in the compound. The resulting equations are used for control
design as well as for simulation. For more on modeling see [13,3]. The aerodynamics of the load and
ropes are currently neglected, but will be considered in future work for flights with high velocity.
3.2 Controller design
The general scheme of the proposed control algorithm for one or several helicopters coupled with the load
is composed of two loops: the outer loop for translation control and inner loop to control the orientation
of each helicopter, see Fig. 6.
The input of the control scheme in Fig. 6 is the desired trajectory x∗(t) for helicopters or for the
load. The translational motion of each helicopter is controlled in the outer loop by controller Rtrans.
Using the deviations from the desired trajectories the controller Rtrans calculates for each helicopter
i the forces Fi which should be generated by its rotors. The helicopter i can realize the force Fi by
adjusting the absolute value of the main rotor lifting force FMRi3 and adjusting the orientation of the
main rotor plane or fuselage q∗i1,2. The desired orientation of the main rotor plane is controlled in the
inner loop by controller Rori. The values FMRi3 and q∗i1,2 are calculated using algebraic relations in
block F−1.
As mentioned above, the rope can not be connected to the center of mass of the helicopter and
the force in the rope produces torques imposed on the helicopter fuselage. Therefore the influence from
the load or from the other helicopters transmitted to the helicopter fuselage by the rope, makes the
orientation control a challenging task [12,13]. The developed approach for control of coupled helicopters
is based on following three ideas:
– The design of the orientation controller (for each helicopter) accounts for the complete dynamics
(translational and rotational) of the whole system, all coupled helicopters and the load. This is
required due to the strong mutual coupling between translation and rotation of each helicopter and
the load.
– The design of the translation controller is based on simplified model and accounts only for the
translational dynamics of the whole system. In this simplified model the helicopters are modeled as
mass points which can produce forces in direction perpendicular to current orientation of the main
rotor plain.
– The usage of the force sensor in the ropes simplifies the design of orientation controller and makes it
robust against variations of system parameters and disturbances.
The usage of the force sensor in the rope is a key issue in the proposed controller design. The force
measured in the rope can be easily recalculated into resultant force and torque acting on the fuselage
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

19
1T
W
1q
1u
Q
6u
1u
D2
u2
T
uK
1Q
qK
1q
*
1q
uK
qK
2q
2q
*
2q
2u
--
- 1e
2e
-
rF
1,2,3q
-
-
2rT
1rTC
*
1u
*
2u
Fig. 7 Scheme for the orientation control
from the rest of the system. These two values are used in the feedback loop of orientation controller.
The usage of the force sensor signal in the feedback loop has three main advantages:
1. the closed loop system becomes very robust against variation of system parameters and disturbances
2. the orientation controller for such complicated systems becomes quite simple
3. the orientation controller does not depend on the number of helicopters connected to the load.
As shown in [13], the rotation dynamics for a single helicopter, represented by two rigid bodies for
the fuselage and the main rotor, can be expressed by the following equations:
TMR1 + K12u2 + K11u1 = 0 (10)
TMR2 + K21u1 + K22u2 = 0 (11)
Where TMR1,2 are the torques generated around the longitudinal and lateral axes of the fuselage, u1,2
are rotation speeds of the fuselage and the coefficients Kxx are constant parameters of the helicopter
and of the main rotor speed. We assume here that the influence of the rotation around the vertical
axis (rotation speed u3) on u1,2 is small and can be considered as disturbance. This assumption is true
if u3 is hold on zero or on constant values using additional tail rotor controller with a time constant
much smaller compared to the time constant of the orientation controller for u1,2. Equations (10, 11)
are coupled through u1,2. This coupling leads to oscillations (for the parameters of typical small size
helicopter) once the system has been stimulated. The scheme for the control of roll and pitch angles
q1,2 for a single helicopter is shown in Fig. 7, where the gray block denotes the model of helicopter
rotational dynamics and kinematics. The controller is composed of blocks Q−1, D and two feedback
loops with gains Ku, Kq for rotation speeds u1,2 and orientation angles q1,2 respectively. The rotation
dynamics described by Eqs. (10), (11) are represented in Fig. 7 by the block W. The block D of the
controller is used to decouple the plant between TMR1,2 and u1,2. The decoupling can be performed by
means of known techniques from linear control theory, e.g. using matrix composed of compensating
transfer functions. This orientation controller shows a good performance and robustness in simulation
and real flight experiments with different types of helicopters as we have shown in [12,13].
The rotational dynamics of a helicopter coupled to the load by means of a rope are strongly influenced
by the motion of the whole system. To account for this influence, block D should be replaced by the
inverse rotational dynamics D not of a single helicopter, but of the whole system (considering both,
the rotation and translation of each helicopter). With this new block D, the orientation controller for
helicopter coupled to the load shows equal performance as the orientation controller with block D for a
single helicopter without load in case for nominal values of all system parameters ρi:
ci = g(qi, qi, ρi), (12)
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

20
Load Transportation Device (LTD)
IMU
Realtime Computer
WLAN
GPS Antenna Magnetic
Field Sensor
GPS
Magnetic Encoder
Magnetic Encoder
Cardan Joint
ForceSensor
Motor
Rope Mounting
Bolt
Release Pin
Fig. 8 UAV component diagram
The simulation experiments have shown that, unlike in the case of a single helicopter, the orientation
controller with inversion block D for coupled helicopter is quite sensitive to variation of the system
parameters ρi(5% variation could be critical). To overcome this problem, we propose to use a force
sensor in the rope. The force Fr, measured in the rope, will be used to calculate the influence on
the rotational dynamics of the coupled helicopters from the remainder of the system. This influence is
expressed by means of torque Tr = Fr × pr−cm, where pr−cm is the position vector connecting rope
attaching point r and helicopter CoM. The resulting orientation controller
ci = g(qi, Fr), (13)
is composed of the orientation controller for a single helicopter and the compensator block C, see
Fig. 7, where Tr is calculated and subtracted from torques calculated in D. The usage of the compensator
C allows us to decouple the control of each helicopter from the rest of the system and to use the same
controller independent of the number of helicopters coupled together via the ropes.
There are two reasons for the robustness of the proposed orientation controller: First, the actual
influence of the load on the fuselage is measured through Fr and, therefore, the compensation becomes
independent from the mass of the load and the length of the rope. Second, as long as the orientation of
the helicopter is known, the calculated compensation torque is always in the correct phase.
The details of the presented control algorithms can be found in [12,13,3,2].
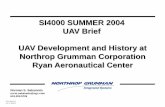
3.3 System description
In Fig. 8 one of the TUB UAVs, used for the slung load transportation experiments, is shown during
flight. The UAVs are based on commercially available small size helicopters. The helicopters have a
rotor diameter of 1.8m, a main rotor speed of approximate 1300 rpm and are powered by a 1.8KW
two-stroke engine. The UAVs can carry about 1.5 kg of additional payload, whereas the weight of the
UAV itself is 12.5 kg. The different components necessary to achieve autonomous flight capabilities are
mounted to the helicopters, using a frame composed of strut profiles. Through the use of these profiles,
the location of hardware components can be altered and new hardware can be installed easily. This allows
quick reconfiguration of the UAVs for different applications, easy replacement of defective hardware and
alteration of the position of different components to adjust the UAVs center of gravity. The components
necessary for autonomous operation are shown in Fig. 8: A GPS, an IMU, a control computer and a
communication link. Due to the strong magnetic field of the engine a magnetic field sensor is mounted on
the tail. All UAVs are equipped with Load Transportation Devices (LTD), which are specially designed
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

21
Driver Process IC
SMLDriver
Process ICSM
L
Real-Time Base System (RTBS)
sharedmemory
EmbeddedMatlabCode IC
SML Executive
LayerICSM
L
MW
InternalCommunication
ProcessICSM
L
Interprocess Communication and System Management
Library (ICSML)
eventsDriver Process IC
SML
Fig. 9 Real-Time Base System (RTBS)
for the transportation of slung loads using one or more UAVs (see Fig. 8). The LTD is composed of a
two axis cardan joint with two magnetic encoders attached to each axis. After the joint a force sensor
is mounted. After the force sensor a release mechanism for the rope is attached, which is composed of a
bolt, inserted into a tube. The bolt is fixed in the tube through a pin, which can be pulled out by a small
motor, to release the load. The release mechanism can be used for emergency decoupling of the UAV
from the load (or the other coupled UAVs), but also to release the load after successful transportation.
The magnetic encoders allow to measure the rope orientation relative to the UAV fuselage. With this
information and the measured force in the rope, it becomes possible to calculate the torque and force
imposed on the UAV through the load (and/or the other coupled UAVs), which are used in the feedback
loop of the compensator block C, see Sec. 3.2.
In Fig. 9 the concept of the software system running on the UAV board computers is shown. The
Real-Time Base System is of composed multiple separate modules, which are connected by a Interprocess
Communication and System Management Library (ICSML). The ICML offers, among other features,
convenient interprocess communication methods, using a shared memory design and a event system for
interprocess notifications (e.g. on the change of shared memory variables). The driver modules are used
to communicate with the peripheral devices of the UAV, such a compass, IMU or GPS. The device
specific protocol is encapsulated in the driver process and the sensor data are presented to the remaining
system through ICSML as generalized objects. The controller of the system was designed and tested in
simulation using Matlab/Simulink. The RTBS provides a generic wrapper module, to embed C-Code
generated by Matlab/Simulink. This allows fast implementation of new control algorithms and an error
free transition from Simulink models to real-time controller code. The internal communication process
is used for development and testing purposes and for experiments without the AWARE system. As
explained in Sec. 2 the executive layer is the proprietary interface to the AWARE On-Board Deliberative
Layer (ODL). The executive layer module provides the basic functionalities needed by the ODL. This
includes the commanding of the UAVs, reporting of the command execution progress and the UAV state.
Additionally the executive layer module provides a certain level of hardware abstraction: The relative
configuration of the UAVs during the load transportation is part of the control loop and shouldn’t be
altered by the ODL. Therefore, during the load transportation the coupled UAVs are presented to the
ODL as a single entity. This way the commanding interfaces for coupled and uncoupled UAVs are equal.
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

22
Fig. 10 Single and multiple UAV slung load transportation
3.4 Experimental results
The load transportation system has been used several times in different experiments, as stand alone
system as well as a part of AWARE platform. In Fig. 10 two load transportation tasks are shown. The
picture on the left with one helicopter transporting the load was taken in Utrera (Spain), April 2008.
The first successful experiment was conducted by the authors in Berlin, November 2007 (http://www.-
youtube.com/watch?v=J3gmzn0bSa4). The picture on the right with three helicopters transporting the
load was taken on our test ground near Berlin, December 2007 (http://www.youtube.com/watch?v=-
tl6DYWNe9ac). For these flight experiments three identical helicopters as described in Sec. 3.3 were
used. The helicopters are equipped with a multi-UAV modular autopilot system developed at TUB. The
rope is attached to the helicopter by means of the Load Deployment Device (LDD) which is mounted
between the landing skids.
In the first experiment one helicopter transported a load of 1 kg using a rope of 5m length. Fig. 11
(left) shows part of the system state during this experiment. All coordinates are given in an ground
fixed frame with the origin at the helicopter take-off position. Coordinate x3 represents the helicopter
altitude. Until the load was dropped the coordinates x1,2 show the position of the load and after the
load dropping, the position of the helicopter itself. The dropping is indicated by a vertical slashed line.
The gray line denotes the desired position given to the controller. We consider the performance of the
controller as quite good, despite the stormy weather conditions on that day. Even with steady wind of
30 km/h and wind gusts up to 40 km/h the controller was able to stabilize the helicopter and damp
upcoming oscillation of the load.
In the second experiment a load of 4 kg was transported by means of three helicopters. In this
experiment ropes with a length of 13m were used. The helicopters were arranged as a equilateral triangle
on the ground, with a distance of 8m between the helicopters. In Fig. 11 (right) the coordinates of all
three helicopters during the whole flight are shown. The coordinates of the helicopters are shown in
different ground fixed frames, which have the same orientation, but different origins (take-off position of
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

23
0 10 20 30 40 50 60 70 80−10
0
10
20
30
40
50
time [s]
dist
ance
[m]
X1
X3
X2 load
deployment
0 20 40 60 80 100 120 140 160 180 200−15
−10
−5
0
5
10
15
20
time [s]
dist
ance
[m]
x3
x1
x2
load in the airload on the ground
Fig. 11 Motion of the load (1 kg) during transportation using one helicopter (left) and motion of three helicopterstransporting one load of 4 kg (right)
each helicopter), therefore there are no offsets between the helicopter trajectories. The load was lifted
when the helicopters reached approximate 12.4 meters. The weight of the load was not considered in
the controller and therefore a small disturbance in the x3 trajectories can be observed at the moment
the load was lifted from the ground as well as during strong acceleration in x1,2-direction. A position
error of each helicopter in hovering was approx. ±0.3m During the whole flight the triangular formation
of the helicopters with a precision of about ±0.3 meters and the load was moved very smoothly. To
our knowledge these were the very first successful flight experiments to transport a load using multiple
autonomous helicopters.
4 Multi-UAV deployment of multiple loads: experimental results
In this section, in order to illustrate the architecture of the AWARE platform, the execution of a real
mission consisting in the deployment of sensor nodes and the monitoring of the scene by the helicopter
team is described. In this case, the helicopters are not physically coupled but at least one helicopter
carries a device that is able to deploy several sensor nodes.
This mission was performed in 2008 during the second year of the AWARE project (see www.aware-
project.net/videos/videos.shtml). The objective was to deploy a sensor node from an UAV in a given
location to repair the WSN network connectivity, whereas another UAV supervised the operation with
the on-board camera and also monitored the area for the deployment and a nearby building. During the
mission, a third UAV took-off to monitor the whole operation. It should be mentioned that all the UAVs
of the AWARE platform are autonomous helicopters.
The following systems were involved in the execution:
– HMI (Human Machine Interface) station: allowed to specify the mission (waypoints with their corre-
sponding headings, speeds, altitudes, etc). After that, there was a mission briefing with the operators
of the UAVs using a simulation of the execution in the HMI to tune several parameters of the mis-
sion using EUROPA. Once an agreement was met, the mission was ready to be executed. During the
execution, the HMI allowed to supervise the execution state of the different tasks allocated to the
UAVs. Figure 12 shows a screenshot of the HMI application during the experiment.
– ODL (On-board Deliberative Layer) software of the UAVs: performing the function described in Sect.
2.
– UAV supervisor and executive software components: allowed to supervise the elementary tasks sent
by the ODL in order to have another check point of their consistency. Finally, the executive software
on-board the helicopter was in charge of the final execution of the elementary tasks.
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

24
Fig. 12 The HMI screen during the experiment: visualization of the locations and status of the TUB helicopterswith their allocated elementary tasks.
– WSN gateway: In this experiment, the gateway was in charge of autonomously repairing the connec-
tivity of the network once a node was placed between two isolated networks. The system was able
to automatically re-compute the data routing and to send all the information from the nodes to the
HMI.
– Middleware: allowed to communicate the tasks status, telemetry and images, and also to send high
level commands from the HMI to the ODL and commands from the ODL to the UAV executive
layer.
4.1 Mission description
The mission was specified by the AWARE platform user using the HMI software. It was a node deploy-
ment mission to repair the WSN connectivity involving three UAVs:
– UAV 1: equipped with a fixed camera aligned with the fuselage of the helicopter and pointing down-
wards 45 .
– UAV 2: it has a device on-board for node deployment (see Fig. 13) and also a camera.
– UAV 3: equipped with a camera mounted inside a mobile gimbal to film the whole mission from
different point of views, transmitting images to the HMI through the middleware.
The AWARE platform user specified the following tasks to be executed (see Table 6):
– τ1: deploy a node in the waypoint wp_1 with GPS geographical coordinates (-5.79816709, 37.20502859)
after τ2 is completed. The goal was to repair the connectivity with the node with identifier 28
deploying the node 11 in wp_1.
– τ2: visit waypoint wp_2 (-5.79790241 37.20488147) to monitor a nearby building.
– τ3: During the node deployment, the corresponding WSN area should be also monitored with the
camera from wp_2.
– τ4: After node deployment, the building should be monitored again from wp_2.
In the next section, the role of the different modules in the ODL architecture is described.
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

25
Fig. 13 Detail of the device on-board the helicopter for the node deployment operation.
Table 6 Tasks specified for the mission. The values of the parameters (Πk) are detailed in Table 7.
τk λk−Ωk Ω+
k Πk
τ1 DEPLOY END(τ2) ∅ Π1
τ2 GOTO ∅ ∅ Π2
τ3 GOTO START(101τ1) ∅ Π3
τ4 GOTO END(103τ1) ∅ Π4
Table 7 Values for the tasks parameters (Πk).
Parameters (Πk) Π1 Π2 Π3 Π4
π1 -5.79816709 -5.79790241 -5.79790241 -5.79790241π2 37.20502859 37.20488147 37.20488147 37.20488147π3 67.0 67.0 67.0 67.0π4 1.1 1.1 1.1 1.1π5 1 1 1 1π6 90 0 -45 0π7 1 0 0 0
4.2 ODL modules during the mission
As the user did not allocate those tasks manually, the distributed task allocation process started from
the HMI software. The negotiation involved the CNP manager modules of UAV 1 and UAV 2, and due
to the different devices on-board each UAV, task τ1 was allocated to UAV 2 whereas the rest of tasks
were allocated to UAV 1 (bids with infinite cost for task τ1).
In this mission, the plan builder role was trivial: for both UAVs a take-off was required before
executing the allocated tasks and the ordering of the tasks was fixed by the preconditions.
Then, the plan refining module of UAV 2 decomposed τ1 as follows:
τ1−→1τ1,101 τ1,102 τ1,103 τ1 (14)
with:
– 1τ1: visit wp_1.
– 101τ1: descend to an altitude of 3 meters above the ground.
– 102τ1: activate the device for node deployment.
– 103τ1: ascend back to the initial altitude.
whereas in UAV 1, it computed the headings required for monitoring the WSN area and the node
deployment operation with the fixed camera from wp_2.
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

26
During the mission, the interface with the executive layer was the task manager. For example, once
the executive layer changed the status of 1τ1 from RUNNING to ENDED, the task manager sent the next
task (101τ1) for its execution. Moreover, the dependencies between tasks of different UAVs were also
handled by the task manager with the assistance of the synchronization module. On the other hand, the
plan merging modules running the algorithm shown in Section 2.6 did not detect any conflict between
the planned 4D trajectories of the UAVs and no change in the plan was inserted.
The resulting evolution of the tasks during the mission is shown in Figure 14, where the different
preconditions have been represented by arrows.
Fig. 14 Tasks executed by each UAV. The arrows represent the different preconditions summarized in Table 6.
Finally, it should be mentioned that this experiment represents the first test of the AWARE platform
integrating the three helicopters and the wireless sensor network in the same mission. Regarding the
WSN, the connectivity with node 28 was achieved a few seconds after node 11 was deployed. Figure 15
shows several photographs taken during the experiment.
Fig. 15 Coordinated flights during the sensor node deployment mission (see http://www.aware-project.net/videos/videos.shtml).
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

27
5 Conclusions
The cooperation of multiple autonomous aerial vehicles is a very suitable approach for many applica-
tions, including detection, precise localization, monitoring and tracking in emergency scenarios. In these
applications the UAVs do not modify the state of the environment and there are no physical interactions
between the UAV and the environment. Furthermore, the interactions between the UAVs, are essentially
information exchanges without physical couplings between them. This paper demonstrates the possi-
bilities of the cooperation and control of multiple aerial robots with sensing and actuation capabilities
allowing load deployment (in particular sensor nodes deployment).
Furthermore, the paper presents the multi-UAV load transportation, which requires the consideration
of physical interactions between the aerial robots. The paper has presented a multi-UAV architecture
developed in the AWARE project that allows different level of interaction among the UAVs and between
the UAVs and the environment, including both sensing and actuation. The interaction between all the
systems in this architecture can be represented by means of an hybrid system formulation coping with
both discrete events associated to the tasks to achieve a given mission and the continuous dynamic
interactions between physically coupled UAVs.
Particularly, the paper has presented results obtained in the AWARE project demonstrating the
lifting and transportation of a slung load by means of one helicopter and also by three coupled helicopters,
which has been the first demonstration of this challenging application. Finally, the paper also presents
a multi-UAV mission consisting of the deployment of the sensor nodes of a WSN.
The proposed methods open many different new opportunities in missions involving the cooperation
of multiple UAVs for applications such as search and rescue and interventions in disaster management
and civil security. The transportation of loads by means of the UAVs can be also considered as a first
step toward the cargo transportation by means of UAVs.
Acknowledgements The authors would like to thank the AWARE Project reviewers Fernando Lobo Pereiraand Ørnulf Jan Rødseth for their very constructive advice and orientation in the project.
References
1. Banatre, M., Marron, P., Ollero, A., Wolisz, A.: Cooperating Embedded Systems and Wireless Sensor Net-works. John Wiley & Sons Inc. (2008)
2. Bernard, M., Kondak, K.: Generic slung load transportation system using small size helicopters. In: Pro-ceedings of the IEEE International Conference on Robotics and Automation, pp. 3258–3264 (2009). DOI10.1109/ROBOT.2009.5152382
3. Bernard, M., Kondak, K., Hommel, G.: Load transportation system based on autonomous small size heli-copters. In: 23rd Int. Unmanned Air Vehicle Systems Conf. (2008)
4. Borenstein, J.: The Omnimate: A guidewire- and beacon-free AGV for highly reconfigurable applications.International Journal of Production Research 38(9), 1993–2010 (2000)
5. Chaimowicz, L., Kumar, V., Campos, M.F.M.: A paradigm for dynamic coordination of multiple robots.Autonomous Robots 17(1), 7–21 (2004)
6. Corke, P., Hrabar, S., Peterson, R., Rus, D., Saripalli, S., Sukhatme, G.: Autonomous deployment and repairof a sensor network using an unmanned aerial vehicle. In: Proceedings of the IEEE International Conferenceon Robotics and Automation, pp. 3602–3608 (2004)
7. Dias, M.B., Stenz, A.: Opportunistic optimization for market-based multirobot control. In: ProceedingsIEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 2714–2720. Lausanne, Switzwer-land (2002)
8. Fierro, R., Das, A., Spletzer, J., Esposito, J., Kumar, V., Ostrowski, J.P., Pappas, G., Taylor, C.J., Hur,Y., Alur, R., Lee, I., Grudic, G., Southall, B.: A framework and architecture for multi-robot coordination.International Journal of Robotics Research 21(10–11), 977–995 (2002)
9. Huntsberger, T.L., Trebi-Ollennu, A., Aghazarian, H., Schenker, P.S., Pirjanian, P., Nayar, H.D.: Distributedcontrol of multi-robot systems engaged in tightly coupled tasks. Autonomous Robots 17(1), 79–92 (2004)
10. Johnson, W.: Helicopter Theory. Dover Publications, Inc. (1980)11. Kane, T., Levinson, D.: Dynamics: Theory and Applications. McGraw-Hill Book Company (1985)12. Kondak, K., Bernard, M., Losse, N., Hommel, G.: Elaborated modeling and control for autonomous small
size helicopters. In: ISR/ROBOTIK 2006 Joint conference on robotics (2006)
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8

28
13. Kondak, K., Bernard, M., Meyer, N., Hommel, G.: Autonomously flying VTOL-robots: Modeling and control.In: IEEE Int. Conf. on Robotics and Automation, pp. 2375 – 2380 (2007)
14. Kosuge, K., Sato, M.: Transportation of a single object by multiple decentralized-controlled nonholonomicmobile robots. In: Proceedings of the IEEE International Conference on Intelligent Robots and Systems,vol. 3, pp. 1681–1686 (1999)
15. Li, H., Karray, F., Basir, O., Song, I.: A framework for coordinated control of multiagent systems and itsapplications. IEEE Transactions on Systems, Man, and Cybernetics Part A:Systems and Humans 38(3),534–548 (2008)
16. Maza, I., Ollero, A.: Multiple UAV cooperative searching operation using polygon area decomposition andefficient coverage algorithms. In: Proceedings of the 7th International Symposium on Distributed AutonomousRobotic Systems, pp. 211–220. Toulouse, France (2004)
17. Merino, L.: A cooperative perception system for multiple unmanned aerial vehicles. Application to the coop-erative detection, localization and monitoring of forest fires. Ph.D. thesis, University of Seville (2007)
18. Mittal, M., Prasad, J.V.R., Schrage, D.P.: Nonlinear adaptive control of a twin lift helicopter system. IEEEControl Systems Magazine 11(3), 39–45 (1991)
19. Ollero, A., Maza, I.: Multiple heterogeneous unmanned aerial vehicles. Springer Tracts on Advanced Robotics.Springer-Verlag (2007)
20. Ollero, A., Merino, L.: Control and perception techniques for aerial robotics. Annual Reviews in Control28(2), 167–178 (2004)
21. Reynolds, H.K., Rodriguez, A.A.: H∞ control of a twin lift helicopter system. In: Proceedings of the 31stIEEE Conference on Decision and Control, pp. 2442–2447 (1992)
22. Smith, G.: The Contract Net Protocol: High-level communication and control in a distributed problem solver.IEEE Transactions on Computers 29(12) (1980)
23. Sugar, T., Kumar, V.: Decentralized control of cooperating mobile manipulators. In: Proceedings of the IEEEInternational Conference on Robotics and Automation, vol. 4, pp. 2916–2921 (1998)
24. Sukkarieh, S., Nettleton, E., Kim, J.H., Ridley, M., Goktogan, A., Durrant-Whyte, H.: The ANSER Project:Data Fusion Across Multiple Uninhabited Air Vehicles. The International Journal of Robotics Research22(7-8), 505–539 (2003). DOI 10.1177/02783649030227005
25. Viguria, A., Maza, I., Ollero, A.: SET: An algorithm for distributed multirobot task allocation with dynamicnegotiation based on task subsets. In: Proceedings of the IEEE International Conference on Robotics andAutomation, pp. 3339–3344. Rome, Italy (2007)
26. Viguria, A., Maza, I., Ollero, A.: S+T: An algorithm for distributed multirobot task allocation based onservices for improving robot cooperation. In: Proceedings of the IEEE International Conference on Roboticsand Automation, pp. 3163–3168. Pasadena, California, USA (2008)
The original publication is available at www.springerlink.com in this link:http://dx.doi.org/10.1007/s10846-009-9352-8