Multi Flying Vehicle Control for Saving Fuel - m-hikari.com · Multi Flying Vehicle Control for...
10
Applied Mathematical Sciences, Vol. 8, 2014, no. 15, 733 - 742 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/10.12988/ams.2014.312690 Multi Flying Vehicle Control for Saving Fuel R. Heru Tjahjana Department of Mathematics Faculty of Science and Mathematics, Diponegoro University Jl. Prof. Sudarto, SH Tembalang, Semarang 50275 Indonesia Priyo Sidik Sasongko Department of Informatics Engineering Faculty of Science and Mathematics, Diponegoro University Jl. Prof. Sudarto, SH Tembalang, Semarang 50275 Indonesia Copyright ©2014 R. Heru Tjahjana and Priyo Sidik Sasongko. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Abstract This paper describes flying multi-vehicle control strategies and its benefit for saving fuel. Exposition starts from inspiration of flying multi-vehicle in daily life. Furthermore, from model of single flying vehicle, we construct the model of multi-vehicle and cost functional model that describe the state of the cost to be met the flying vehicle. The flying multi-vehicle control designed with optimal control strategy. The design of optimal control is done through the Pontryagin Maximum Principle, brings the model to a system of equations consisting of state equations and costate equations. In the system of states equations, each having initial and final condition, in the costate equations system has no requirements at all. The next problem is converted to the initial value problem and search for the approximate initial condition equation of costate equations system which has no requirements using a modified method of steepest descent. Thus, the control of multi-vehicle successfully performed and the simulation results presented on the results and discussion section. In addition, we also calcute the fuel which used by multi-vehicle, compared by the fuel which used by each vehicle in solo flying. The result can be conclude that the fuel more efficient if the flying vehicles in formation flying. Keywords: flying vehicle, multi-vehicle, fuel saving
Transcript of Multi Flying Vehicle Control for Saving Fuel - m-hikari.com · Multi Flying Vehicle Control for...

Applied Mathematical Sciences, Vol. 8, 2014, no. 15, 733 - 742
HIKARI Ltd, www.m-hikari.com http://dx.doi.org/10.12988/ams.2014.312690
Multi Flying Vehicle Control for Saving Fuel
R. Heru Tjahjana
Department of Mathematics
Faculty of Science and Mathematics, Diponegoro University
Jl. Prof. Sudarto, SH Tembalang, Semarang 50275 Indonesia
Priyo Sidik Sasongko
Department of Informatics Engineering
Faculty of Science and Mathematics, Diponegoro University
Jl. Prof. Sudarto, SH Tembalang, Semarang 50275 Indonesia
Copyright ©2014 R. Heru Tjahjana and Priyo Sidik Sasongko. This is an open access article
distributed under the Creative Commons Attribution License, which permits unrestricted use,
distribution, and reproduction in any medium, provided the original work is properly cited.
Abstract
This paper describes flying multi-vehicle control strategies and its benefit for saving fuel. Exposition starts from inspiration of flying multi-vehicle in daily life. Furthermore, from model of single flying vehicle, we construct the model of multi-vehicle and cost functional model that describe the state of the cost to be met the flying vehicle. The flying multi-vehicle control designed with optimal control strategy. The design of optimal control is done through the Pontryagin Maximum Principle, brings the model to a system of equations consisting of state equations and costate equations. In the system of states equations, each having initial and final condition, in the costate equations system has no requirements at all. The next problem is converted to the initial value problem and search for the approximate initial condition equation of costate equations system which has no requirements using a modified method of steepest descent. Thus, the control of multi-vehicle successfully performed and the simulation results presented on the results and discussion section. In addition, we also calcute the fuel which used by multi-vehicle, compared by the fuel which used by each vehicle in solo flying. The result can be conclude that the fuel more efficient if the flying vehicles in formation flying.
Keywords: flying vehicle, multi-vehicle, fuel saving
734 R. Heru Tjahjana and Priyo Sidik Sasongko
1 Introduction
Swarming behavior is naturally clustered behavior shown by animals and occurs
on land, sea, or air (Liu and Passino, 2000). Example of the phenomenon of
swarming on the ground is a bunch of hyenas in pursuit of prey. With swarming,
pursuit of prey by a bunch of hyenas are more likely to get results than a hyena
who pursue their prey alone (Wiesel, 2006). Example of the phenomenon of
swarming in the ocean occurs in herring horde. When swimming, herring fish
releasing little mucus to reduce turbulence, consequently herring fish that swim
behind others will benefit because the energy required to fight the turbulence
becomes smaller (Huse et al., 2002). Bunch of wild geese when flying together is
an example of swarming phenomenon that occurs in the air. Swarming
phenomenon with the formation of this particular motion is specifically referred to
as flocking. Flocking phenomena that happens to a group of geese forming
inverted V formation. With inverted V formation, geese form a particular vortex
field, the birds of the most swan as a "leader" and the aerodynamic gain a greater
distance to fly farther and higher cruising speed (Seiler, 2003).
Beside shown by the animals, flocking phenomenon also appears in the transport
vehicle. In carrying out its mission, aircraft fly together. The fighter planes
engaged with leading aircraft as a leader do flocking with inverted V-formation
will give the effect of better efficiency in terms of fuel and the speed of the
aircraft are moving solo (Thien et al., 2007). The paper authored by Thien et al.
(2007) shows the efficiency through wing of aircraft design. In conducting its
operations, naval warship convoy consisting of aircraft carriers and other small
ships sail together. Moving ships clustered with certain formations will provide
better communication networks and efficient in monitoring the surrounding
conditions (Borhaug et al., 2006). The next studies related to multi-vehicle control,
published by Børhaug et al., (2006), Arrichiello et al., (2006), Gazi et al., (2007),
Breivik et al.,(2008), Ahmadzadeh et al., (2009) , Moshtagh et al., (2009), Shi et
al. (2009), Su et al. (2009), but these papers do not discuss about the flying
vehicle.
The recent research on multi flying vehicle that has been published, for example,
by Michael, et al. (2011), which uses multi- vehicle flew for surveillance activities,
further Kaliappan, et al. (2011) examined the multi helicopter mini models are
used for the benefit of search and surveillance. The other research conducted by
Fink, et al. (2011) worked on controlling the flying robot lifting together. While
Turpin, et al. (2012) published their work on the spacecraft formation flying
quadrotors used to attack the opponent. The other publications authored by
Lindsey, et al. (2012) explored the quadrotors team together to build
three-dimensional objects.

Multi flying vehicle control for saving fuel 735
2 Multi Vehicle Model
Either in mathematics or in engineering, flight dynamics of the single vehicle can
be modeled in general as a model of non-linear dynamic system as follows
=f(x(t),u(t)). (1)
In equation (1), the state vector x contains the state variables that determine the
flying vehicle dynamics. In general, the state vector here is a vector that describes
the position and orientation of flying vehicle. Vector field f in equation (1)
contains something that explain the link between the state vector x and input or
control u. When construct as a model of multi-vehicle, then from equation (1) can
be presented as
=f1(x1(t),u1(t))
=f2(x2(t),u2(t))
(2)
=fk(xk(t),uk(t)).
In the system of equations (2), the dynamics of the first flying vehicle modeled by
the first equation, the second flying vehicle modeled by second equations, and
each row in the equation (2) describe a flying vehicle, until the last flying vehicle
modeled by the last row in equation (2).
In this paper, for single vehicle model we follow Zheng et al. (2008), specially
selected flight dynamics of the vehicle in the form of non-linear
{
(3)
as a specific form or a specific incident of equation (1), then the equation (3)
include the state vector x(t) =[x(t), y(t), and the input vector or control
vector u(t) =[ . The control is airspeed rate and is turn
rate. Zheng et al. (2008) use the model which describe in (3) to control three
flying vehicles track the given desired path. From the single vehicle dynamics can
be formed as a multi-agent multi vehicle models as special form of the system of
equations (2) as follows
{
{
(4)

736 R. Heru Tjahjana and Priyo Sidik Sasongko
{
In this paper, we consider the system with three flying vehicles, so from equation
(4) can be obtained the model of multi flying vehicle as follows
{
{
(5)
{
Next, discussed the cost functional model that makes the vehicle cannot move
away from each other, and does not collide with each other and also includes a
model that represents the fuel from the vehicle to fly together, which is a subject
of interest in this study. Functional model is generally the cost is as follows
∫
(6)
Note the cost functional (6), the functional J consists of two parts, namely g and h
term. The first part, g repulsion tribes and tribal tribes load pull, which makes the
vehicle does not collide with each other and fly less away from each other. The
second part, h rate includes the cost of parts that states total control of the vehicle
or can also be interpreted as a special energy that is directly proportional to fuel
the vehicle. Functional costs are presented in (6) is the most common functional
costs. When are specified, then the tribe tribes containing g repulsion and
attraction term can be presented as
∑
‖ ‖ ∑
(‖ ‖) (7)
In equation (7), the first term is the repulsion term, γ is the repulsion constants,
this term will make the flying vehicles do not collide with each other.
Furthermore the second term in equation (7) is the atrractor term, with μ is a
atrractor constant, the presence of these terms make the flying vehicles do not
moving away from each other. Thus, in more detail the functional costs generally
presented in (6) can be expressed in the following equation
∫
∑
‖ ‖ ∑
(‖ ‖) ∑
‖ ‖ (8)
In equation (8), is actually still common also, because of the many vehicles that
set is k vehicles, whereas in this study was applied to the three vehicles then more
precisely model the cost functional used is as follows

Multi flying vehicle control for saving fuel 737
∫
∑
‖ ‖ ∑
(‖ ‖) ∑
‖ ‖ (9)
The third term in equation (9) is an energy tribe specific physical controls can be
claimed as something that is directly proportional to the fuel. In this paper, we
assume that airspeed rate or directly proportional to the fuel which used.
3 Simulation Result
The simulation starts with describe the simulation scenarios. Scenario of the
simulation is done to control three flying vehicles that flew from a particular
position and orientation toward a certain position by the end of orientation as a
goal. The vehicles are not allowed to move away and not collide. The
eexpectation of this simulation is with perform flying together, the fuel being used
more efficiently. Control design of the vehicle using the optimum control by
utilizing the Pontryagin Maximum Principle. From multi-vehicle model that
descrideb in (5) and the cost functional that defined in (9) can be obtained
Hamilton function. From the Hamilton function can be obtained the Hamiltonian
system. The Hamiltonian system consists of the state system and auxiliary system
or costate system. For optimality conditions, the Hamiltonian differentiated into
each control variable and then make the term equal to zero, the results obtained
control equations for each vehicle. Then, the equation of the vehicle control
system is put back into Hamilton System, and a system of differential equation is
obtained.
In this paper, the simulation is done with the initial condition
x(0)=[x1(0), x2(0), x3(0), y1(0), y2(0), y3(0), 1(0), 2(0), 3(0)]
=[7,3,9,7,5,3, /4, /4, /4]
and the final condition
x(1)=[x1(1),x2(1),x3(1),y1(1),y2(1),y3(1), 1(1), 2(1), 3(1)]
=[13,9,15,13,10,9,– /7,– /7,– /7].
Simulation is done with matlab software. In the simulation cannot be done with
just a simple as relying on software alone. In the next step, difficulties appear on
the system of differential equations, exactly, the system has excessive condition.
Usually on issues of differential equations encountered a problem with the
differential equation initial conditions, or the final terms problems, or problems
with initial and final conditions as well, but in the completion of this simulation is
obtained half of the members of Hamiltonian systems, systems equation of state
has the initial and final conditions, but the costate variables do not have any
conditions. This difficulty is resolved by changing the problem to the initial value
problem, and the approximation for initial value of the costate equations following
Algorithm 1 as follows.
Algorithm 1
Data

738 R. Heru Tjahjana and Priyo Sidik Sasongko
Step 0 : set i = 0
Step 1 : Calculate the search direction
Stop
Step 2 : Calculate the step- size ( )
Step 3 : Set
Substitution i with i +1 Go To Step 1.
The convergence of sequence go to the best approximation for
initial conditions of auxiliary state variables or costate variables shown in
Theorem 1 below.
Theorem 1
Suppose F has a derivative and { }
is the sequence constructed by algorithm
1, then for each point of convergence for q* and { }
will satisfy
Proof:
Suppose that sequence converges to and assume
. Let Lipschitz constants for on the ball with center
and the radius denoted by ( . Suppose again ( ] such
that
‖ ‖
‖ ‖
for every With the mean value theorem in calculus, then for an
applies
( ) ( ) ( ) [⟨ ( ) ( ) ⟩]
( ) ( )
( )
Note that
( ) ‖ ( )‖‖ ‖
Because satisfy the Lipschitz condition then
( ) ( ) ‖ ‖
For obtained
( ) ( ) ‖ ‖ ,
and consequently
( ) ( ) ‖ ( )‖‖ ‖ ‖ ‖ . (10)
Minimum of the right hand side of inequality (10) occurred in
‖ ‖
Multi flying vehicle control for saving fuel 739
with
‖ ‖
.
Suppose
= { }
and defined
‖ ‖ .
As a result – Since the value of the right hand side of inequality (10) for
‖ ‖ must be greater than the minimum value of the left hand side
inequality (10) for λ, then applies be
( ) ( ) (11)
Since sequence { ( )}
monotonically down and because F continuous
function, then the sequence { ( )} converges toward Follow the
monotonous nature of the line, then for i go to apply ∞ ( ) to . On the
other side of the inequality (11) to get, for i go to ∞ then apply ( ) to -∞. Up
here obtained two opposites or contradiction. Then the presuppositions must be
negated and we obtain that .
Utilize Algorithm 1, the best approximation for initial values of costates variables
are obtained. The method which proposed in Algoritm 1 here, more general than
the method which proposed in Tjahjana et al. (2009). The simulation result of
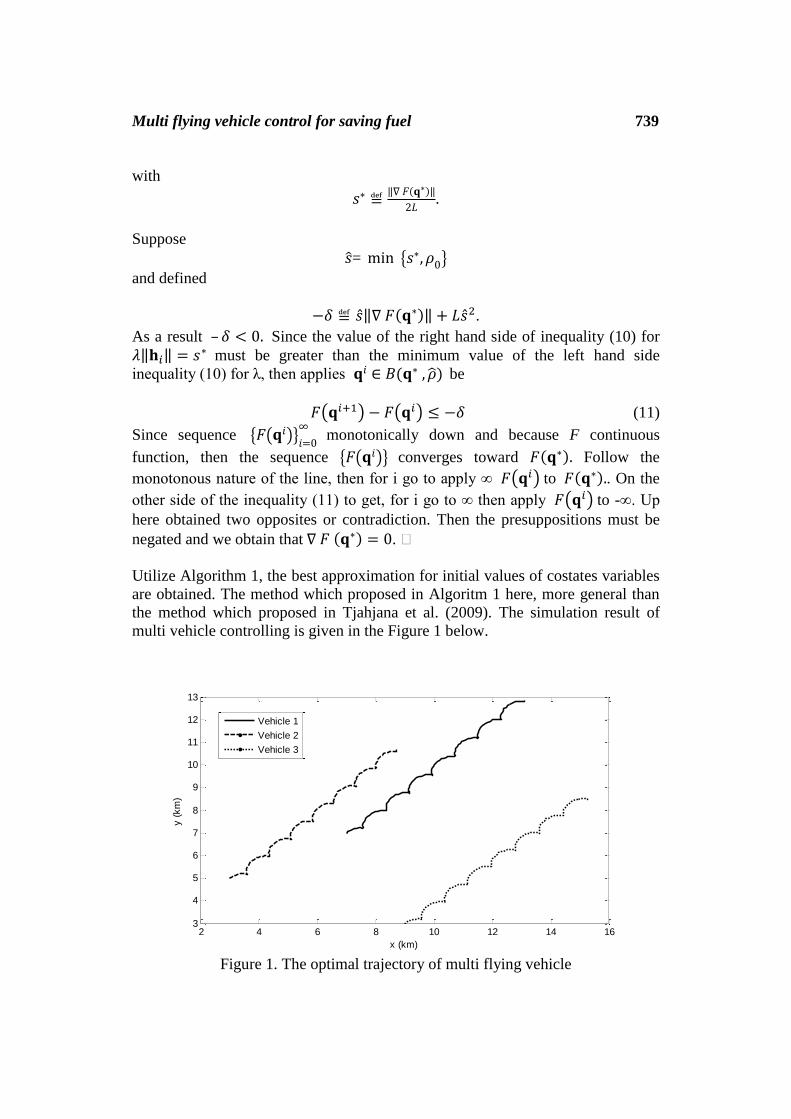
multi vehicle controlling is given in the Figure 1 below.
Figure 1. The optimal trajectory of multi flying vehicle
2 4 6 8 10 12 14 163
4
5
6
7
8
9
10
11
12
13
x (km)
y (
km
)
Vehicle 1
Vehicle 2
Vehicle 3

740 R. Heru Tjahjana and Priyo Sidik Sasongko
In Figure 1, one can see that the vehicles were controlled to move meet the
simulation scenarios, from the trajectory of the vehicles can be seen that the
vehicles do not collide with each other. The vehicles also do not move away from
each other. This result indicates that the costs functional (9) described above, can
work well.
Furthermore, use the third term of functional costs functional (9) by using the
airspeed rate that associated with the fuel used for each vehicles, the fuel
used can be calculated. The fuel which used by the vehicles on the simulation
above can be calculated as follows, when the vehicle flying solo fuel that must be
spent by each vehicle is 9.4317e+004 volume units. Referring Ray, et al. (2002)
which states that the formation would reduce the inhibition of the (drag) by 20 %,
then the reduction in fuel or fuel savings can be claimed to be comparable with
the subtraction of this drag, when the vehicle flew together, the fuel which used
by each vehicle is 7.5454e+004 volume units.
4 Conclusion
Respectively associated with the process undertaken this publication is as follows,
from a single flying vehicle models, and mathematical modeling can be done
flying multivehicle. Furthermore, with the task of setting of the vehicle is flying
together with the formation, no collisions and not away from each other, then
drafted a functional model of the cost. From multi-vehicle models and functional
models can be obtained cost function which can then be expressed in Hamiltonian
Systems. By utilizing the Pontryagin Maximum Principle, obtained the over
determined system of differential equations. The strategy to solve this problem,
performed by bringing the problem to the completion of the initial value problem,
and apply Algorithm 1. Next, the control problem multi-vehicle successfully
satisfies the simulation scenario. Furthermore, the calculation of fuel have shown
that the fuel used to travel the same distance, when the vehicle flew alone
compared with when the vehicle flew in V-formation, the results show that the
fuel used in the formation more efficient or smaller than if the vehicle fly in Solo.
Acknowledgements. This research was funded by The Goverment of Republic of
Indonesia, throgh DIPONEGORO UNIVERSITY FUNDAMENTAL BOPTN
2013 RESEARCH GRANT, under contract number 302a-11/UN7.5/LT/2013.
References
[1] A. Ahmadzadeh, N. Motee, A. Jadbabaie and G. Pappas, Multi-vehicle path
planning in dynamically changing environments, Proceeding of IEEE
International Conference on Robotics and Automation, (2009), 2449-2454.

Multi flying vehicle control for saving fuel 741
[2] E. Børhaug, A. Pavlov, R. Ghabcheloo, K. Pettersen, K., A. Pascoal and C.
Silvestre, Formation control of underactuated marine vehicles with
communication constraints, Proceeding of IFAC Conference on Manuevering
and Control of Marine Craft, Lisbon, Portugal (2006).
[3] F. Arrichiello, S. Chiaverini, and T.I Fossen, Formation Control of Marine
Surface Vessels using the Null-Space-Based Behavioral Control, Lecture
Notes in Control and Information Systems series, Springer-Verlag, Vol. 336,
(2006).
[4] G. Huse, S. Railsback and A. Ferno, Modeling changes in migration pattern
of herring: collective bahaviour and nerical domination, Journal of Fish
Biology, 60, (2002), 571 - 582.
[5] H. Shi, L.Wang and T. Chu, Flocking of multi-agent systems with a
dynamic virtual leader, International Journal of Control, 82, (2009). 43-58.
[6] H. Su, X. Wang and G.Cheng, A Connectivity-preserving flocking
algorithm for multi-agent systems based only on position measurements,
International Journal of Control, 82, (2009), 1334-1343.
[7] H. Tjahjana, I. Pranoto, H. Muhammad and J. Naiborhu, On The Optimal
Control Computation of Linear Systems, Journal of the Indonesian
Mathematical Society, 15, (2009), 13-20.
[8] I. Weisel, Predatory and Foraging Behaviour of Brown Hyenas at cape fur
Seal colonies, Ph.D. Thesis, University of Hamburg, Germany, 2006.
[9] J. Fink, N. Michael, S. Kim and V. Kumar, Planning and Control for
Cooperative Manipulation and Transportation with Aerial Robots, The
International Journal of Robotics Research, 30, (2011), 324-334.
[10] M. Breivik, V.E. Hovstein, and T.I Fossen, Ship Formation Control: A
Guided Leader-Follower Approach, Proceeding of IFAC World Congress
Seoul (2008).
[11] M. Turpin, N. Michael, and V. Kumar, Trajectory design and control for
aggressive formation flight with quadrotors, Autonomous Robots, 33, (2012),
143-156.

742 R. Heru Tjahjana and Priyo Sidik Sasongko
[12] N. Michael, E.Stump and M.K Kartik, Persistent Surveillance with a
Team of MAVs, Proceeding of International Conference on Intelligent
Robots and Systems, San Francisco, CA, USA, (2011), 2708-2714.
[13] N. Moshtagh, N. Michael, A. Jadbabaie and K. Daniilidis, Vision-Based,
Distributed Control Laws for Motion Coordination of Nonholonomic Robots,
IEEE Transactions on Robotics, 25, (2009), 851-860.
[14] P. Seiler, A. Pan and K.Hedrick, A systems interpretation for observations
of bird v-formations, J. Theory Biology, 59221, (2003), 279 - 287.
[15] Q. Lindsey, D. Mellinger and V. Kumar, Construction with quadrotor teams,
Autonomous Robots, 33, (2012), 323-336.
[16] R.J. Ray, B. R. Cobleigh, M. J. Vachon and C.S. John, Flight Test
Techniques Used To Evaluate Performance Benefits During Formation
Flight, NASA Dryden Flight Research Center, California, 2002.
[17] T.I. Fossen, Guidance and control, Lecturer Note, Norwegian University of
Science and Technology, Trodheim, Norway, 2009.
[18] V. Gazi, B. Fidan, Y.S.Hanay and M.I. Koksal, Aggregation, foraging, and
formation control of swarms with non-holonomic agents using potential
functions and sliding mode techniques, Turk J Elec Engin, 15, No.2 (2007).
[19] V.K. Kaliappan, H. Yong, D. Min and A. Budiyono, Behavior-based
decentralized approach for cooperative control of a multiple small scale
unmanned helicopter, Proceeding of International Conference on Intelligent
Systems Design and Applications, Córdoba, Spain, (2011), 196-201.
[20] Y. Liu, and K. Passino, Swarm Intelligence: Literature Overview, The Ohio
State University, Neil Ave, Columbus, 2000.
[21] Z. Zheng, S.C. Spry and A.R. Girard, Leaderless Formation Control Using
Dynamic Extension and Sliding Control, Proceeding of The IFAC World
Conggres, 2008.
Received: December 10, 2013