
Multi-Channel Assignment in Wireless Sensor Networks: A ...
22
Downloaded from engine.lib.uwaterloo.ca on 19 February 2022 Multi-Channel Assignment in Wireless Sensor Networks: A Game Theoretic Approach Qing Yu, Jiming Chen, Yanfei Fan, Xuemin Sherman Shen, Youxian Sun Date Submitted: 23 November 2009 Date Published: 24 November 2009 Updated information and services can be found at: https://engine.lib.uwaterloo.ca/ojs- 2.2/index.php/pptvt/article/view/590 These include: Subject Classification Vehicular Technology Keywords Channel assignment and reservation;; Submitting Author's Comments this paper has been accepted by IEEE INFOCOM 2010 Comments You can respond to this article at: https://engine.lib.uwaterloo.ca/ojs- 2.2/index.php/pptvt/comment/add/590/0 Copyright Copyright © Date Submitted: 23 November 2009 Qing Yu et al. This is an open access article distributed under the Creative Commons Attribution 2.5 Canada License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Transcript of Multi-Channel Assignment in Wireless Sensor Networks: A ...

Downloaded from engine.lib.uwaterloo.ca on 19 February 2022
Multi-Channel Assignment in WirelessSensor Networks: A Game TheoreticApproach
Qing Yu, Jiming Chen, Yanfei Fan, Xuemin Sherman Shen,Youxian SunDate Submitted: 23 November 2009Date Published: 24 November 2009
Updated information and services can be found at:https://engine.lib.uwaterloo.ca/ojs-2.2/index.php/pptvt/article/view/590
These include:
Subject Classification Vehicular Technology
Keywords Channel assignment and reservation;;
Submitting Author'sComments
this paper has been accepted by IEEE INFOCOM 2010
Comments You can respond to this article at:https://engine.lib.uwaterloo.ca/ojs-2.2/index.php/pptvt/comment/add/590/0
Copyright Copyright © Date Submitted: 23 November 2009 Qing Yu et al.This is an open access article distributed under the CreativeCommons Attribution 2.5 Canada License, which permitsunrestricted use, distribution, and reproduction in any medium,provided the original work is properly cited.

1
Multi-Channel Assignment in Wireless Sensor
Networks: A Game Theoretic Approach
Qing Yu†, Jiming Chen†‡, Yanfei Fan‡, Xuemin(Sherman) Shen‡
and Youxian Sun†
† State Key Lab of Industrial Control Technology, Zhejiang University,
Hangzhou, 310027, P.R.China
Email: [email protected]; jmchen,[email protected]
‡ Department of Electrical and Computer Engineering, University of Waterloo,
Waterloo, ON, N2L 3G1, Canada
Email:yfan, [email protected]
Abstract
In this paper, we formulate multi-channel assignment in Wireless Sensor Networks (WSNs) as an
optimization problem and show it is NP-hard. We then propose a distributed Game Based Channel
Assignment algorithm (GBCA) to solve the problem. The GBCA takes into account both the network
topology information and the transmission routing information. We prove there exists at least one
Nash Equilibrium in the channel assignment game. Furthermore, we analyze the suboptimality of Nash
Equilibrium and the convergence of the Best Response in the game. Simulation results show that GBCA
can reduce interference significantly and achieve satisfactory network performance in terms of delivery
ratio, throughput, packet transfer delay and energy consumption.
I. INTRODUCTION
Wireless Sensor Networks (WSNs) with low-cost, low-power and multi-functionality, make
their applications with large scale and dense deployments possible. However, traditional ways
to use a single channel among the whole WSNs in the same geographical region, can not work
Downloaded from engine.lib.uwaterloo.ca on 19 February 2022 Page 1 of 21

2
properly when the WSNs become larger and denser since frequent interference among the WSNs
will decrease the network performance dramatically. The half-duplex radio transceiver in current
available sensor node is already able to operate on multi-channel. Thus, using the available
multiple channels efficiently to exploit parallel transmission in WSNs becomes very attractive.
There already exist a considerable number of multi-channel protocols for wireless networks
[1], [2], [3], [4], [5]. However, most of them have strong assumptions that the transceivers
either use the frequency hopping spread spectrum wireless cards or can operate on multiple
channels simultaneously. Unfortunately, these protocols are not applicable to WSNs, because
current available sensor node with only one simple half-duplex radio transceiver can not satisfy
these strong assumptions. Besides, the extra overhead of some protocols caused by dynamic
channel negotiations or RTS/CTS packets, poses major challenge on both constrained energy
and limited bandwidth in WSNs.
Recently, some multi-channel protocols have been proposed specially for WSNs. Most of
them dynamically assign channels to links according to the transmitting flows in the network
[6], [7], [8], [9], [10]. Although these protocols can reduce interference to some degrees, the
requirements of frequent negotiations and highly accurate time synchronization cause extra large
overhead. Alternatively, static channel assignment protocols are based on network topology [11],
[12]. They work with less overhead than the dynamical protocols, but can not reduce interference
efficiently because they neither take full advantage of the routing information nor dynamically
track the transmitting flows. For example, MMSN [11] uses the network topology information
to balance the channel usage among two-hop neighbors. Without routing information, it may
make the channel usage in the links which are not involved in the routing excess but the channel
usage in the links which are involved in the routing tight. In this paper, observing that the
interference in the network depends to a large extent on the routing, we take into account both
the Topology Information and the Routing Information (TIRI) to reduce the interference more
efficiently. However, in general, it is difficult to fully exploit the TIRI in WSNs. For example,
PMIT [12] statically divides the whole network into mutually exclusive single-channel subtrees,
which takes advantage of the inter-tree routing information but does not exploit the intra-tree
routing information. In order to fully exploit TIRI, all the autonomous sensor nodes must be
involved in the channel assignment and share information dynamically.
Game theory is the study of the interaction of autonomous agents. The features of WSNs—
Downloaded from engine.lib.uwaterloo.ca on 19 February 2022 Page 2 of 21

3
decentralized operation, self configuration, and energy awareness—result in that each sensor
node in WSNs behaves as an autonomous agent, and thus make game theory as a promising
way to solve the competitive problems in WSNs, such as coverage [13], routing [14], sensor
activation [15], etc. To the best of our knowledge, this paper is the first attempt to use game
theory to cope with the channel assignment problem in WSNs. Based on the observations that
the interference suffered by the sender is positively related to the number of links heard by the
receiver, and the routing in applications of WSNs is generally static and of tree/forest structure,
the whole network can be considered to be composed of lots of parent-children sets which are
constructed from TIRI. In order to fully exploit TIRI, we model the channel assignment among
these sets as a game with the total interference of the whole network as the social objective.
Specifically, parent in each set is modelled as player, and its payoff is the sum of the interference
suffered by the set and the interference caused by the set. The channel assignment game is evolved
according to the Best Response (BR) dynamic, i.e., each player chooses the channel to minimize
its payoff according to the channels chosen by the other players. Furthermore, we prove that
BR converges into a Nash Equilibrium (NE), and analyze the social efficiency of NE. Based on
BR, we propose a Game Based Channel Assignment algorithm (GBCA) to handle the NP-hard
channel assignment problem in WSNs in a distributed way. The main contributions of this paper
are summarized as follows:
• We analyze the relationship between the number of links heard by the receiver and the
interference suffered by the sender, and prove that this relationship is linear. We formulate
the channel assignment in WSNs as an optimization problem and prove that it is NP-hard.
• The channel assignment in WSNs is modelled as a channel assignment game to fully exploit
TIRI. We prove that the game is an exact potential game and there exists at least one NE
in the game. We analyze the price of anarchy of the game and bound it by c−1c
where c is
the number of available channels, which means any NE is suboptimal. We adopt BR as the
evolution rule of the channel assignment game and prove that BR converges into a NE in
finite iterations.
• We propose the GBCA, which is a distributed algorithm, based on BR. GBCA can provide
a suboptimal solution to the channel assignment problem in polynomial time, and it is com-
patible with both scheduling based and contention based medium access control schemes.
Downloaded from engine.lib.uwaterloo.ca on 19 February 2022 Page 3 of 21

4
Simulation results show that GBCA reduces interference significantly and achieves better
network performance in terms of delivery ratio, throughput, packet transfer delay and energy
consumption than MMSN [11] does.
The remainder of the paper is organized as follows. Section II analyzes the interference
and formulates the optimization problem for channel assignment. We propose the game based
algorithm to solve this problem and analyzes the convergence and suboptimality of the algorithm
in Section III. The performance of the algorithm is evaluated by simulations in Section IV.
Finally, we conclude our paper in Section V.
II. PRELIMINARIES AND PROBLEM FORMULATION
A. Interference Analysis
In wireless communication, whether a message gets corrupted or not is closely related to
whether other links, which are heard by the receiver, are transmitting message. In general, as
long as there is another message being transmitted simultaneously through some of these links,
there is a collision at the receiver and the message may be corrupted. We analyze the relationship
between the number of links heard by the receiver and the interference suffered by the message
transferred to the receiver in a similar way as in [16] in the following.
Assume that there are I links heard by the receiver and the probability that a message
is transmitted through a link at a given time is q. Therefore, the probability of a successful
transmission with one try is
p = (1− q)I−1. (1)
If there is no maximum number of retries constraint, the average number of retries before a
successful transmission is
R =+∞∑k=1
kp(1− p)k−1 − 1 =1
p− 1. (2)
Apparently, the equation above usually holds because the MAC layer allows relatively large
number of retries. Substituting Equation (1) into Equation (2), we have
R = (1 +q
1− q)I−1 − 1. (3)
Downloaded from engine.lib.uwaterloo.ca on 19 February 2022 Page 4 of 21

5
Since q is very small for the light load in WSNs, an approximate R can be obtained as follows.
R.=
q
1− q(I − 1). (4)
Equation (4) reveals that the more links the receiver hears, the more retries a message needs
to be successfully received. Furthermore, the more times the sender retries, the more energy it
consumes and the longer delay the transmission suffers, which in turn results in both throughout
and delivery ratio decrease. Thus, the average number of retries, i.e., R, is a key metric to
characterize the interference suffered by the sender. Furthermore, according to Equation (4), I is
approximately linear with R, so we adopt I as the interference metric and call it the interference.
B. Problem Formulation
The links towards a receiver can be divided into two categories: intersecting links and interfer-
ing links [17]. The transmissions in intersecting links aim to the receiver, while the transmissions
in interfering links do not aim to the receiver but can be overheard by the receiver. If only
single channel is used, then both intersecting links and interfering links will interfere with
the transmission aiming to the receiver. Though we can not reduce the interference caused by
intersecting links because there is only one half-duplex radio transceiver in sensor node and thus
the receiver can not receive multiple messages simultaneously, we can reduce the interfering
links by using multiple channels. In this paper, we assign channel in a receiver-centric way,
i.e., each sensor node is assigned one channel to receive message. If providing enough non-
overlapping channels, we can make all interfering links use different channels from the ones
their receivers use. In this case, the receiver can not overhear the transmissions in interfering
links, and the interference in the network can be remarkably reduced. However, the number
of non-overlapping channels is usually fixed and limited in practice [12]. Hence, the problem
becomes to optimally assign the limited channels to minimize interference. We first define some
notations in Table I and make some useful assumptions as follows: 1) The network routing is
of tree/forest structure, i.e., the children deliver their messages to their parents in the network;
2) Channels are all non-overlapping and do not interfere with each other; 3) The links between
two sensor nodes are symmetric, i.e., given that sensor nodes i and j are connected, if i uses
j’s channel to transmit then i can be heard by j, and vice versa.
Downloaded from engine.lib.uwaterloo.ca on 19 February 2022 Page 5 of 21

6
TABLE I
NOTATION DEFINITIONS
Symbol Definition
| · | | · | represents the cardinality of a set.
C the set of non-overlapping channels, i.e.,
C=1,2,...,c.
G(V,E) the topology graph of sensor network. It is a
directed graph and includes routing information.
V the set of sensor nodes including both normal
sensor nodes which know their parents and sink
sensor nodes which only collect messages.
parent(i) the parent of sensor node i in the tree/forest
structure.
Child(i) the set of children of sensor node i in the
tree/forest structure.
P the set of all non-leaf sensor nodes which
have children in the tree/forest structure, i.e.,
P=1,2,...,m.
f the channel assignment that assigns each non-
leaf sensor node one channel to receive mes-
sage, i.e., f : P → C.
E the set of links including both intersecting links
and interfering links. The links among sensor
nodes always appear in pairs and with different
directions.
s(e),r(e) the sender and receiver of link e.
Es the set of intersecting links, i.e., Es=e : e ∈ E
and s(e)∈ Child(r(e)).
Ef the set of interfering links, i.e., Ef=e : e ∈ E
and s(e) /∈ Child(r(e)).
ch(e) the channel of link e, i.e.,
ch(e)=f(parent(s(e))).
J(e) the potential interference that link e may yield
to the network, i.e., J(e)=|Child(r(e))|.
I(i, f) the interference suffered by sensor node i in
assignment f , i.e., I(i, f)=|e : e ∈ E, r(e) =
parent(i) and ch(e) = f(parent(i))|. Since
the sink sensor nodes just collect messages in
the network, they suffer no interference.
Lr(f), Lu(f) for a given f , Lr is the set of all the interfering
links that can not be heard by their receivers,
and Lu is the set of all the interfering links
that still can be heard by their receivers, i.e.,
Lr(f)=e : ch(e) = f(r(e)), e ∈ Ef and
Lu(f)=e : ch(e) = f(r(e)), e ∈ Ef.
Downloaded from engine.lib.uwaterloo.ca on 19 February 2022 Page 6 of 21

7
We use the total interference suffered by all sensor nodes as the optimization objective, since
it is corresponding to the average number of retries over the network and in turn reflects the
network performance.
The primal optimization problem (PP): Given G(V,E) and C, the primal optimization problem
is to find a channel assignment f to minimize the total interference∑i∈V
I(i, f).
Furthermore, for a given G(V,E) and an assignment f , we have∑i∈V
I(i, f) =∑e∈Es
J(e) +∑
e∈Lu(f)
J(e). (5)
Since both the total potential interference that all the intersecting links may yield and the total
potential interference that all the interfering links may yield are constants in a given G(V,E),
we have ∑e∈Es
J(e) = A,∑
e∈Lu(f)
J(e) +∑
e∈Lr(f)
J(e) = B, (6)
where A and B are constants regardless of f . Substituting Equation (6) into Equation (5), we
have ∑i∈V
I(i, f) = A+B −∑
e∈Lr(f)
J(e). (7)
Hence PP can be equivalently transformed to a dual problem.
The dual optimization problem (DP): Given G(V,E) and C, the interference reduction problem
is to find a channel assignment f to maximize the total removed interference U(f) =∑
e∈Lr(f)
J(e).
III. GAME BASED CHANNEL ASSIGNMENT
In this section, we first analyze the hardness of the channel assignment problem in WSNs, then
model the problem as a channel assignment game, and finally provide a distributed algorithm
based on the game to handle the problem.
A. Problem Assessment
The minimum same-color edges coloring problem (MSCP): Given undirected graph G(V,E)
and integers 0< K ≤ |V|, 0≤ M < |E|, find a coloring (i.e., assign each vertex one of the K
colors) such that the number of same-color edges (i.e., the colors of its two vertexes are the
same) is not more than M .
Downloaded from engine.lib.uwaterloo.ca on 19 February 2022 Page 7 of 21

8
Lemma 1: MSCP is NP-complete.
Proof: we set M=0 in MSCP, thus MSCP is restricted to GRAPH K-COLORABILITY
problem [18] which is a typical NP-complete problem. Hence, we prove that MSCP is NP-
complete.
The relative decision problem (RP): Given G(V,E), C and a non-negative integer W , deter-
mine whether there exists a channel assignment f such that∑i∈V
I(i, f) ≤ W .
Theorem 1: PP is NP-hard.
Proof: To prove this theorem, it is sufficient to prove RP is NP-complete. It is easy to see
that RP is in NP. Then, we transform MSCP into RP. For an arbitrary G, we create a G in the
following way. For each node i in G, we create two normal sensor nodes in G, i.e., pi and si, and
pi is the parent of si. Two directed edges are added: one is from si to pi and the other is from
pi to si. For each edge eij in G, we create two directed edges in G: one is from si to pj and the
other is from pj to si. Finally, we create a sink sensor node r and |V| edges each of which is from
pi to r. Thus, we get a new graph G(V,E) where |V |=2|V|+1 and |E|=3|V|+2|E|. Apparently,
this transformation is polynomial time. Let the channel assigned to pi in G correspond to the
color assigned to i in G and the interfering links heard by the non-leaf sensor nodes to the
same-color edges. Thus, MSCP with K, M and G is transformed, in polynomial time, into RP
with |C|=K, W=|V|2+|V|+M and G. According to Lemma 1, MSCP is NP-complete, hence RP
is also NP-complete. Therefore, PP is NP-hard.
Obviously, DP is also NP-hard as DP is completely equivalent to PP.
B. Channel Assignment Game
Since DP is NP-hard, it is hard to find a solution with both polynomial execution time and
optimal result. Instead, we model the channel assignment game to cope with DP with polynomial
execution time and suboptimal result in this subsection.
Recalling the assumption of tree/forest structure, we construct parent-children sets from the
network to exploit its TIRI, i.e., each non-leaf sensor node in the network and its children
constitute a Parent-Children Set (PCS). We define interfering PCSs as a pair of PCSs such that
the message sent by some child in one PCS may be heard by the parent in the other, e.g., PCS3
and PCS4 in Fig.1, and PCS1 and PCS4. Correspondingly, the parents in the pair of PCSs are
called interfering parents, e.g., player3 and player4 in Fig.1. All the interfering parents of parent
Downloaded from engine.lib.uwaterloo.ca on 19 February 2022 Page 8 of 21

9
i is denoted by a set Θ(i). In fact, the interference suffered by any child in a PCS is determined
by the channel usage among the PCS and its interfering PCSs, i.e., the more parents in Θ(i) use
the same channel as parent i uses, the more interference the children of parent i suffer. Thus,
in order to minimize the interference suffered by their children, the PCSs should autonomously
compete and interact with each other for the channel usage. In this case, the channel assignment
among the PCSs can be naturally modelled as a channel assignment game.
In the channel assignment game, the players are all parents of the PCSs, i.e., P . Each player i
chooses a channel si ∈ C as its strategy. The strategies of all players make a channel assignment
s=(s1, s2, ..., sm), and we denote the strategies of all players except for player i by s−i. The
payoff of player i is a function of s and denoted by ui(s). To minimize the total interference
of the network, we consider both the interference suffered by the children of player i and the
interference caused by its children when constructing ui(s). When choosing a channel, player
i must try its best to choose a channel different from its interfering players to minimize the
interference suffered by its children; On the other hand, player i should bring as less interference
as possible to the children of its interfering players because excessive selfishness may result in
extra interference to each other’s children. Therefore, we define ui(s) in two parts as follows:
ui(s) =∑
e∈X(i,s)
J(e) +∑
e∈Y (i,s)
J(e), (8)
X(i, s) = e : e ∈ Lu(s), s(e) ∈ Child(i),
Y (i, s) = e : e ∈ Lu(s), r(e) = i.
For example, in Fig.1, the payoffs of player1, player2, player3 and player4 are 3, 4, 4 and 3,
respectively.
The channel assignment game is designed to be a repeated game, and players negotiate the
channel usage according to the Best Response (BR) dynamic. In each iteration of the game,
each player chooses the channel to minimize its payoff based on the channel assignment in
last iteration, but the interfering players can not change their channels simultaneously. However,
BR does not guarantee convergence in all kinds of games and the stable state is not always
with optimal social utility. Hence, we study the characteristics of our channel assignment game
in terms of convergence and suboptimality in the remaining subsection. We begin with the
definition of the famous stable state in game theory—Nash Equilibrium (NE), and then discuss
Downloaded from engine.lib.uwaterloo.ca on 19 February 2022 Page 9 of 21

10
c2 c1 c2
PCS1 PCS2 PCS3
player1 player2 player3
c1
player4
PCS4
Fig. 1. An example of channel assignment among interfering PCSs, where player2 and player3 use channel c1 to receive
message, and player1 and player4 use channel c2 to receive message. The solid arrows represent intersecting links, while the
dashed arrows represent interfering links.
200 300 400 5000
0.2
0.4
0.6
0.8
1
number of nodes
(a)
2 4 6 80
0.2
0.4
0.6
0.8
1
number of channels
resi
dual
inte
rfer
ence
rat
io
(b)
200 300 400 50010
20
30
40
50
60
number of nodes
itera
tions
to c
onve
rge
(c)
2 4 6 8
20
30
40
50
number of channels
itera
tions
to c
onve
rge
(d)
GBCAMMSNbound
GBCAMMSNbound
GBCA GBCA
Fig. 2. Numerical results of GBCA in terms of convergence and suboptimality
the convergence of BR to NE and the suboptimality of NE.
Nash Equilibrium: In a game, a strategies profile s∗ is called NE iff. for each player i and an
arbitrary strategy si in its strategy space, the following inequality is always satisfied,
ui(s∗) ≤ ui(si, s
∗−i). (9)
To exploit the convergence of BR, we have the following theorem.
Theorem 2: The channel assignment game is an exact potential game [19].
Proof: We construct the potential function as follows:
φ(s) =1
2
∑i∈P
ui(s). (10)
Downloaded from engine.lib.uwaterloo.ca on 19 February 2022 Page 10 of 21
11
20 40 600.8
0.85
0.9
0.95
1
number of flows
(a)
20 40 60200
250
300
350
400
450
500
number of flowsth
roug
hput
(kbp
s)
(b)
20 40 600.008
0.01
0.012
0.014
0.016
0.018
0.02
number of flows
pack
et tr
ansf
er d
elay
(s)
(c)
20 40 602
2.2
2.4
2.6
2.8x 10
−6
number of flows
ener
gy c
onsu
mpt
ion
per
byte
(mW
hr) (d)
MMSNGBCA
MMSNGBCA
MMSNGBCA
MMSNGBCA
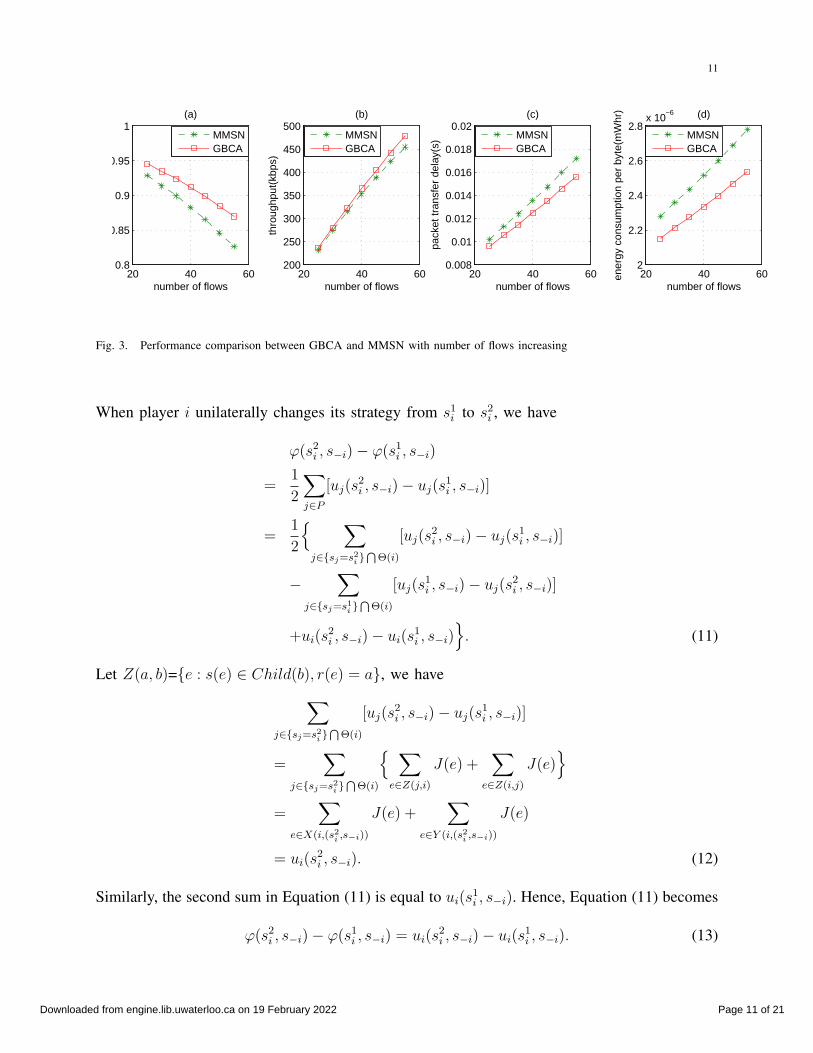
Fig. 3. Performance comparison between GBCA and MMSN with number of flows increasing
When player i unilaterally changes its strategy from s1i to s2i , we have
φ(s2i , s−i)− φ(s1i , s−i)
=1
2
∑j∈P
[uj(s2i , s−i)− uj(s
1i , s−i)]
=1
2
∑j∈sj=s2i
∩Θ(i)
[uj(s2i , s−i)− uj(s
1i , s−i)]
−∑
j∈sj=s1i ∩
Θ(i)
[uj(s1i , s−i)− uj(s
2i , s−i)]
+ui(s2i , s−i)− ui(s
1i , s−i)
. (11)
Let Z(a, b)=e : s(e) ∈ Child(b), r(e) = a, we have∑j∈sj=s2i
∩Θ(i)
[uj(s2i , s−i)− uj(s
1i , s−i)]
=∑
j∈sj=s2i ∩
Θ(i)
∑e∈Z(j,i)
J(e) +∑
e∈Z(i,j)
J(e)
=∑
e∈X(i,(s2i ,s−i))
J(e) +∑
e∈Y (i,(s2i ,s−i))
J(e)
= ui(s2i , s−i). (12)
Similarly, the second sum in Equation (11) is equal to ui(s1i , s−i). Hence, Equation (11) becomes
φ(s2i , s−i)− φ(s1i , s−i) = ui(s2i , s−i)− ui(s
1i , s−i). (13)
Downloaded from engine.lib.uwaterloo.ca on 19 February 2022 Page 11 of 21

12
Thus, we prove that the channel assignment game is an exact potential game and one of its
potential functions is φ(s).
Since φ(s) is bounded and only gets integral values, Equation (13) indicates that φ(s) will
continue decreasing in BR until it reaches a local minimum point. The number of iterations to
converge is finite. From this finite improvement property [19], we have the following conclusions.
Corollary 1: The channel assignment game always has NE, and the assignment minimizing
φ(s) must be a NE.
Theorem 3: In the channel assignment game, BR always converges to a NE, the number of
iterations to converge is less than (|V | − 1)2.
Proof: The potential function, as defined in Equation (10), can be calculated as follows.
φ(s) =1
2
∑i∈P
∑e∈X(i,s)
J(e) +∑
e∈Y (i,s)
J(e)
=∑
e∈Lu(s)
J(e) =∑i∈P
∑e∈Y (i,s)
J(e) (14)
For each i ∈ P , |Y (i, s)| ≤ |V | − 1− |Child(i)| and∑i∈P
|Child(i)| ≤ |V | − 1. Thus,
φ(s) ≤∑i∈P
|Child(i)|(|V | − 1− |Child(i)|) (15)
= (|V | − 1)∑i∈P
|Child(i)| −∑i∈P
|Child(i)|2
< (|V | − 1)2 (16)
Hence, we have 0 ≤ φ(s) < (|V | − 1)2.
According to BR, each player tries to choose the channel to minimize its own payoff in each
iteration. Thus, in iteration k, the situation is always one of the following two cases:
Case 1: none of the players changes channel, i.e., for each player i and an arbitrary si,
ui(sk) ≤ ui(si, s
k−i). According to the definition of NE, sk is a NE.
Case 2: at least one player changes channel. Suppose that there are m ≥ 1 such players and
denote them by a set Ω(k). According to BR, these players must not be interfering players,
hence,
φ(sk)− φ(sk−1) =∑
i∈Ω(k)
[ui(sk)− ui(s
k−1)]. (17)
Moreover, each term in the sum of Equation (17) is no more than -1. Thus,
φ(sk)− φ(sk−1) ≤ −m ≤ −1. (18)
Downloaded from engine.lib.uwaterloo.ca on 19 February 2022 Page 12 of 21

13
Therefore, before satisfying Case 1, each iteration will make φ decrease at least one. Since
0 ≤ φ < (|V | − 1)2, BR will take at most (|V | − 1)2 iterations to converge to a NE.
Remark 1: According to Theorem 3, the number of iterations to converge to a NE is O(|V |2).
In Section III-C, it will be shown that each iteration can be executed in polynomial time. Thus,
the channel assignment can be handled in polynomial time.
Remark 2: In Inequalities (15) and (16), the upper bound of φ(s) is very relaxed. The number
of links towards a sensor node is usually bounded by a constant K, which is related to the node
density. The children of a non-leaf sensor node are usually comparable in number to its interfering
links. Let 0 < δ < 1 be the upper bound of the ratio of interfering links to all links towards a
non-leaf sensor node. Then φ(s) ≤ Kδ(|V | − 1). Moreover, φ(s) usually decreases more than
one in one iteration because many players could change their channels simultaneously if they
are not interfering players. Hence, the number of iterations to converge is usually much less
than (|V | − 1)2.
From Equation (14), φ(s) is equal to the total interference caused by the unremoved interfering
links. Thus, from Equation (6), φ(s) also reflects the social objective in DP. According to
Corollary 1, the optimal assignment must be a NE. Based on these observations, we study the
social efficiency of NE as follows.
Corollary 2: Any NE of the channel assignment game is locally optimal, i.e., in a NE, all
non-leaf sensor nodes can not reduce the interference unilaterally and thus DP reaches a local
maximum point.
Theorem 4: The Price of Anarchy [20]: let so be the optimal solution of DP and s∗ be an
arbitrary NE, then we have c−1c
≤ U(s∗)U(so)
≤ 1.
Proof: According to the definition of NE, each player chooses a channel from C to make
its current payoff as less as possible in the Nash Equilibrium s∗. Thus, we have the following
inequality.
ui(s∗) =
∑e∈X(i,s∗)
J(e) +∑
e∈Y (i,s∗)
J(e)
≤ 1
c
∑e∈s(e)∈Child(i)
∩Ef
J(e)
+∑
e∈r(e)=i∩
Ef
J(e). (19)
Downloaded from engine.lib.uwaterloo.ca on 19 February 2022 Page 13 of 21

14
Therefore, the potential function can be bounded as:
φ(s∗) ≤ 1
2c
∑i∈P
∑e∈s(e)∈Child(i)
∩Ef
J(e)
+∑i∈P
∑e∈r(e)=i
∩Ef
J(e)
(20)
=1
2c× 2
∑e∈Ef
J(e) =B
c(21)
Thus, according to Equations (6) and (14), we have
U(s∗) = B −∑
e∈Lu(s∗)
J(e) = B − φ(s∗) (22)
≥ B − B
c≥ c− 1
cU(so) (23)
Apparently, U(s∗) ≤ U(so), thus,
c− 1
c≤ U(s∗)
U(so)≤ 1. (24)
Remark 3: According to Theorem 4, any NE is a suboptimal solution of DP. Taking Micaz
for example, there are 8 non-overlapping channels available [12]. According to Inequality (23),
in a NE, at least 87.5% of the interference caused by interfering links is reduced. According to
Inequality (24), the NE is at most 12.5% worse than the optimal assignment.
Remark 4: Since φ(s) can only get integral values, and it is not always true that all the
interfering players of a player use different channels and have the same potential interference to
it, then the relaxations in Inequalities (19) and (20) are usually a little excessive. Thus, NE is
usually much closer to the optimal assignment than the given bound.
Since the suboptimality of NE is closely related to c, we have an encouraging corollary as
follows when c is large enough.
Corollary 3: When c > maxi∈V
|Θ(i)|, any NE is optimal and removes all the interference caused
by interfering links.
Proof: Since c > maxi∈V
|Θ(i)|, in an arbitrary NE, any player i can and have to choose a
channel s∗i which is different from its interfering players’s. Hence, ui(s∗i , s
∗−i) = 0. Furthermore,
φ(s∗i , s∗−i) = 0. According to Equation (22), we have U(s∗) = B. Moreover, U(s∗) ≤ U(so) ≤ B.
Therefore, U(s∗) = U(so) = B.
Downloaded from engine.lib.uwaterloo.ca on 19 February 2022 Page 14 of 21

15
Algorithm 1 Game Based Channel Assignment Algorithm1: Input: the initial channel assignment s0
2: Output: the stable channel assignment NE s∗
3: for each iteration k=1,2,... do
4: for any non-leaf sensor node i ∈ P do
5: //window RTC:
6: compute the channel to minimize the non-leaf sensor node i’s payoff: ch = arg minsi∈C
ui(si, sk−1−i );
7: if ch is not equal to sk−1i then
8: broadcast a REQ message with i’s id;
9: else
10: ski = ch;
11: end if
12: collect messages in window RTC;
13: //window PTC:
14: if node i has received REQs in window RTC then
15: find the max id in REQs and reply a PER message to it;
16: end if
17: collect messages in window PTC;
18: //window STC:
19: if node i has broadcasted REQ in window RTC then
20: if node i has received PERs from all its neighbors in window PTC then
21: set both its rcv ch and ski to ch;
22: broadcast a CHA message with ch and its id;
23: else
24: set both its rcv ch and ski to sk−1i ;
25: end if
26: end if
27: collect messages in window STC;
28: //window RCC:
29: if node i has received CHAs in window STC then
30: if the id of one CHA is its parent then
31: set its snd ch to the ch in this CHA;
32: end if
33: rebroadcast the CHAs with i’s id added;
34: end if
35: collect messages in window RCC;
36: if node i receives CHAs in window RCC and the CHAs are not from itself then
37: update channel information in its RNNT according to the ch and id of the CHAs;
38: end if
39: end for
40: if sk is equal to sk−1 then
41: The NE s∗ = sk is reached;
42: break;
43: end if
44: end for
Downloaded from engine.lib.uwaterloo.ca on 19 February 2022 Page 15 of 21

16
In summary, in the channel assignment game, BR will converge to a NE after at most (|V |−1)2
iterations, and the suboptimality of NE is guaranteed by c−1c
≤ U(s∗)U(so)
≤ 1.
C. Game Based Channel Assignment Algorithm
The payoff of a player depends only upon the channels chosen by its interfering players,
so players only need to exchange information with their interfering players to implement BR.
Hence, based on BR, we propose a distributed Game Based Channel Assignment algorithm
(GBCA) to cope with DP. For the channel assignment game, the most important elements are
the payoff functions of players, which reflect the benefit of players and further determine the
NE of the game and its performance, and the BR dynamic of players, which determines the
dynamic evolution of the game. The payoff functions and BR also constitute GBCA. Thus,
according to Section III-B, the existence of stable state, the convergence of BR to stable state
and the suboptimality of stable state are guaranteed in GBCA. We state the detail of GBCA as
follows:
Assume that each sensor node knows its parent, its children and the sensor nodes which have
interfering links towards it. Each sensor node has a structure (rcv ch, snd ch, id) (i.e., the
channel it uses to receive, the channel it uses to send and its ID number) and a Related Non-leaf
Nodes Table (RNNT) which is used to record information about its interfering parents: their
channels, their number of children and the corresponding intermediate sensor nodes. GBCA is
divided into two phases: the interfering parents discovery phase and the channel negotiation
phase.
In the first phase, each sensor node broadcasts twice. In the first broadcast, each sensor node
broadcasts a message with its id and its number of children; In the second broadcast, each sensor
node rebroadcasts the messages, which it received in the first broadcast, with its id added. After
these broadcasts, each non-leaf sensor node knows its interfering parents, their number of children
and the intermediate sensor nodes. All these information can be used to calculate payoff in the
next phase.
In the second phase, BR is implemented and the channel negotiation is conducted in iterations.
Each iteration occupies a time slot and is divided into four time windows: the RTC window,
the PTC window, the STC window and the RCC window. This phase is the core of GBCA, we
present its pseudo-code in Algorithm 1.
Downloaded from engine.lib.uwaterloo.ca on 19 February 2022 Page 16 of 21

17
2 4 6 80.8
0.82
0.84
0.86
0.88
0.9
0.92
number of channels
(a)
2 4 6 8320
330
340
350
360
370
number of channelsth
roug
hput
(kbp
s)
(b)
2 4 6 80.01
0.012
0.014
0.016
0.018
0.02
number of channels
pack
et tr
ansf
er d
elay
(s)
(c)
2 4 6 82
2.5
3
3.5
4
4.5x 10
−6
number of channels
ener
gy c
onsu
mpt
ion
per
byte
(mW
hr) (d)
MMSNGBCA
MMSNGBCA
MMSNGBCA
MMSNGBCA
Fig. 4. Performance comparison between GBCA and MMSN with number of channels increasing
Apparently, each iteration in the second phase could be completed in polynomial time. Addi-
tionally, (|V | − 1)2 iterations are sufficient to converge to a NE. Therefore, this algorithm will
converge in polynomial time.
In addition, the communications in these two phases use a designated channel. After the two
phases, the channel of each non-leaf node is assigned, then the network starts to use this channel
assignment to communicate. Time synchronization is only needed in the second phase but not
required when transmitting data. Conducting data transmission task, GBCA is compatible with
lots of medium access control schemes, including both scheduling based ones and contention
based ones. So we do not intend to design a medium access control scheme specially for GBCA.
Currently, IEEE 802.15.4 is very popular in WSNs, so we use its medium access control scheme
in the simulations of this study with just one modification: when performing CCA, the sensor
node should check both its channel to send and its parent’s channel to send to avoid colliding
with its siblings and parent.
IV. PERFORMANCE EVALUATION
A. Convergence and Suboptimality Evaluation
In Section III-B, we analyze the convergence and suboptimality of GBCA theoretically. In
this subsection, we evaluate these characteristics of GBCA numerically. We set the field to
200m×200m, and communication radius to 30m. Furthermore, the number of non-overlapping
Downloaded from engine.lib.uwaterloo.ca on 19 February 2022 Page 17 of 21

18
20 30 40 500.86
0.87
0.88
0.89
0.9
0.91
0.92
communication radius(m)
(a)
20 30 40 50345
350
355
360
365
370
communication radius(m)th
roug
hput
(kbp
s)
(b)
20 30 40 500.01
0.012
0.014
0.016
0.018
0.02
communication radius(m)
pack
et tr
ansf
er d
elay
(s)
(c)
20 30 40 502
2.5
3
3.5
4x 10
−6
communication radius(m)
ener
gy c
onsu
mpt
ion
per
byte
(mW
hr) (d)
MMSNGBCA
MMSNGBCA
MMSNGBCA
MMSNGBCA
Fig. 5. Performance comparison between GBCA and MMSN with communication radius increasing
channels is 2∼8 and the number of sensor nodes is 200∼500. According to Inequality (23), we
use 1/c as the upper bound of residual interference ratio (i.e., the ratio of the residual interference
to the total potential interference). We depict the numerical results in Fig.2, where each point is
the average result of 50 repeated computations.
From Fig.2.(a) and (b), we can observe: 1) GBCA always reduces more interference than
MMSN, and its residual interference is far less than the upper bound, which means NE is usually
much better than its lower bound and closer to the optimal solution in Inequality (24); 2) With
the number of sensor nodes increasing, the residual interference ratio of GBCA increases. That
is because the increasing number of sensor nodes in the same area exacerbates interference;
3) With the number of channels increasing, the residual interference ratio of GBCA decreases
quickly to zero since the increasing number of channels gives more choices to each non-leaf
sensor node and removes more interference.
From Fig.2.(c) and (d), we can see: 1) GBCA converges very fast and usually less than 50
iterations, which is far less than the bound (|V |−1)2; 2) Approximately, the number of iterations
needed for convergence increases linearly with the number of sensor nodes since more nodes
in the network cause more channel changes; 3) With the number of channels increasing, the
number of iterations first increases and then decreases since the number of sensor nodes to
change channel increases with the increase of the number of channels, when it is relatively
small, and the probability that sensor nodes become stable at early iteration increases with the
increase of the number of channels, when it is relatively large.
Downloaded from engine.lib.uwaterloo.ca on 19 February 2022 Page 18 of 21

19
B. Network Performance Evaluation
GBCA uses game theory as a tool to exploit TIRI as much as possible to reduce the interference
suffered by the network. In this subsection, we evaluate its network performance and compare it
with MMSN (this study implements the even-selection, which can be used when non-overlapping
channels are not sufficient and leads to less interference [11]) by simulations with OMNET++.
We conduct three groups of simulations. In all these simulations, the field is set to 200m×200m,
and 320 sensor nodes are uniformly distributed in the field. They form a forest with 16 sink
sensor nodes. The physical model of sensor nodes is in accordance with CC2430 [21], and the
modified CSMA mentioned in Section III-C is used to control medium access.
In the first group of simulations, we set the number of non-overlapping channels to 6 and
communication radius to 30m, and vary the number of flows from 25 to 55. The rate of each
flow is 25 packets per second. These flows are randomly generated in space but the number of
flows transmitting simultaneously is fixed according to the setting. The simulation results are
shown in Fig.3 where each point is the average result of 45 repeated simulations and so is for
the remaining two groups. From Fig.3, we can see: 1) GBCA outperforms MMSN in all these
metrics, i.e., it has larger delivery ratio and throughput but yields smaller packet transfer delay
(i.e., the time a sensor node spends competing for medium access and transmitting a packet) and
energy consumption; 2) These advantages get more remarkable with the increase of the number
of flows since GBCA takes full advantage of TIRI but MMSN just tries to balance the channel
usage in two-hop neighborhood. And when the load of the network gets heavier, the effect of
TIRI becomes more obvious.
In the second group of simulations, we set the number of flows to 40 and communication
radius to 30m, and vary the number of non-overlapping channels from 2 to 8. The way to
generate flows is the same as the first group and so is for the third group. The simulations results
are shown in Fig.4. We can see: 1) GBCA outperforms MMSN in all these metrics. 2) GBCA
achieves the near-best performance with fewer non-overlapping channels than MMSN does, e.g.,
it almost yields the largest delivery ratio and throughput when the number of channels is 5, while
MMSN may achieve this when the number of channels is 7 or more. That is because GBCA can
combine TIRI with the limited channels rationally to reduce the interference in the network. This
characteristic of GBCA makes it more practical than MMSN, as the non-overlapping channels
Downloaded from engine.lib.uwaterloo.ca on 19 February 2022 Page 19 of 21

20
are very limited in practice [12].
In the third group of simulations, we set the number of non-overlapping channels to 6 and
the number of flows to 40, and vary the communication radius of sensor nodes from 20m
to 50m, which means the number of neighbors of sensor node increases and generates more
interference. We depict the simulation results in Fig.5. From Fig.5, we can see: 1) GBCA
outperforms MMSN in all these metrics; 2) These advantages become more significant with the
communication radius increasing; 3)When the radius is small, the delivery ratio and throughput
of GBCA increase faster than MMSN with the communication radius increasing, and when the
radius is large, the delivery ratio and throughput of GBCA decrease slower than MMSN with
the communication radius increasing. It is also because GBCA exploits TIRI more fully than
MMSN does. The increment in delivery ratio and throughput with the increase of radius when
the radius is relatively small results from the following reason: the sensor nodes get shorter path
to deliver message when the simulation builds the forest.
V. CONCLUSIONS
In this paper, we have studied how to assign channels in WSNs to reduce interference
and improve network performance. Unlike previous static assignment protocols, we take full
advantage of both the network topology information and the routing information to assign
channels in WSNs. We formulate channel assignment in WSNs as an optimization problem,
and propose a distributed game based algorithm GBCA, which inspires the dynamic interactions
between non-leaf sensor nodes and fully exploits both the network topology information and
the routing information, to solve this problem. We prove that GBCA can converge to a NE in
finite iterations, and provide bounds on the suboptimality of NE theoretically. The convergence
and suboptimality of GBCA are further testified numerically. Network performance simulations
show that GBCA achieves better network performance than MMSN in terms of delivery ratio,
throughput, packet transfer delay and energy consumption.
REFERENCES
[1] Z. Tang and J.J. Garcia-Luna-Aceves. Hop-reservation multiple access (hrma) for ad-hoc networks. In Proc. IEEE
INFOCOM 1999, pages 194–201, New York, NY, USA, 1999.
Downloaded from engine.lib.uwaterloo.ca on 19 February 2022 Page 20 of 21

21
[2] A. Raniwala and T. Chiueh. Architecture and algorithm for an ieee 802.11-based multi-channel wireless mesh network.
In Proc. IEEE INFOCOM 2005, pages 2223– 2234, Miami, Florida, USA, 2005.
[3] J. So and N. Vaidya. Multi-channel mac for ad-hoc networks: Handling multi-channel hidden terminal using a single
transceiver. In Proc. ACM MOBIHOC 2004, pages 222–233, Roppongi Hills, Tokyo, Japan, 2004.
[4] R. Vedantham, S. Kakumanu, S. Lakshmanan, and R. Sivakumar. Component based channel assignment in single radio,
multi-channel ad hoc networks. In Proc. ACM MOBICOM 2006, pages 378–389, Los Angeles, CA, USA, 2006.
[5] Y. Bi, K.H. Liu, L. X. Cai, X. Shen, and H. Zhao. A multi-channel token ring protocol for qos provisioning in inter-vehicle
communications. IEEE Transactions on Wireless Communications, to appear.
[6] X. Chen, P. Han, Q.S. He, S.L. Tu, and Z.L. Chen. A multi-channel mac protocol for wireless sensor networks. In Proc.
IEEE CIT 2006, 2006.
[7] J.B. Zhang, G. Zhou, C.D. Huang, S.H. Son, and J.A. Stankovic. Tmmac: An energy efficient multi-channel mac protocol
for ad hoc networks. In Proc. IEEE ICC 2007, pages 3554–3561, Glasgow, Scotland, 2007.
[8] Y. Kim, H. Shin, and H. Cha. Y-mac: An energy-efficient multi-channel mac protocol for dense wireless sensor networks.
In Proc. IPSN 2008, pages 53–63, St. Louis, Missouri, USA, 2008.
[9] H.K. Le, D. Henriksson, and T.F. Abdelzaher. A practical multi-channel media access control protocol for wireless sensor
networks. In Proc. IPSN 2008, pages 70–81, St. Louis, Missouri, USA, 2008.
[10] X.D. Wang, X.R. Wang, X. Fu, G.L. Xing, and N. Jha. Flow-based real-time communication in multi-channel wireless
sensor networks. In Proc. EWSN 2009, pages 33–52, Cork, Ireland, 2009.
[11] G. Zhou, C.D. Huang, T. Yan, T. He, J.A. Stankovic, and T.F. Adbelzaher. Mmsn: Multi-frequency media access control
for wireless sensor networks. In Proc. IEEE INFOCOM 2006, pages 1–13, Barcelona, Catalunya, Spain, 2006.
[12] Y.F. Wu, J.A. Stankovic, T. He, and S. Lin. Realistic and efficient multi-channel communications in wireless sensor
networks. In Proc. IEEE INFOCOM 2008, pages 1193–1201, Phoenix, AZ, USA, 2008.
[13] X. Ai, V. Srinivasan, and C.K. Tham. Optimality and complexity of pure nash equilibria in the coverage game. IEEE
Journal on Selected Areas in Communications, 26(7):1170–1182, September 2008.
[14] R. Kannan and S.S. Iyengar. Game-theoretic models for reliable path-length and energy-constrained routing with data
aggregation in wireless sensor networks. IEEE Journal on Selected Areas in Communications, 22(6):1141–1150, August
2004.
[15] V. Krishnamurthy, M. Maskery, and G. Yin. Decentralized adaptive filtering algorithms for sensor activation in an unattended
ground sensor network. IEEE Transactions on Signal Processing, 56(12):6086–6101, December 2008.
[16] X. Ling, Y. Cheng, J.W. Mark, and X. Shen. A general analytical model for the ieee 802.15.4 contention access period.
In Proc. IEEE WCNC 2007, pages 316–321, Hong Kong, China, 2007.
[17] O.D. Incel and B. Krishnamachari. Enhancing the data collection rate of tree-based aggregation in wireless sensor networks.
In Proc. IEEE SECON 2008, pages 569–577, San Francisco, California, USA, 2008.
[18] M.R. Garey and D.S. Johnson. Computer and intractability: a guide to the theroy of NP-completeness. W.H. Freeman,
New York, 1979.
[19] D.Monderer and L. Shapley. Potential games. Games and Economic Behavior, pages 124–143, 1996.
[20] E. Koutsoupias and C. Papadimitriou. Worst-case equilibria. In Proc. STACS 1999, pages 404–413, 1999.
[21] TI. A True System-on-Chip solution for 2.4 GHz IEEE 802.15.4 / ZigBee(TM), http://focus.ti.com/lit/ds/symlink/cc2430.pdf
edition.
Downloaded from engine.lib.uwaterloo.ca on 19 February 2022 Page 21 of 21


















