Moving Object Tracking and Avoidance Algorithm for Differential Driving AGV Based on Laser...

of 16
-
Upload
pandu-sandi-pratama -
Category
Documents
-
view
224 -
download
4
Transcript of Moving Object Tracking and Avoidance Algorithm for Differential Driving AGV Based on Laser...
-
8/12/2019 Moving Object Tracking and Avoidance Algorithm for Differential Driving AGV Based on Laser Measurement Technol
1/16
-
8/12/2019 Moving Object Tracking and Avoidance Algorithm for Differential Driving AGV Based on Laser Measurement Technol
2/16
-
8/12/2019 Moving Object Tracking and Avoidance Algorithm for Differential Driving AGV Based on Laser Measurement Technol
3/16
-
8/12/2019 Moving Object Tracking and Avoidance Algorithm for Differential Driving AGV Based on Laser Measurement Technol
4/16
-
8/12/2019 Moving Object Tracking and Avoidance Algorithm for Differential Driving AGV Based on Laser Measurement Technol
5/16
-
8/12/2019 Moving Object Tracking and Avoidance Algorithm for Differential Driving AGV Based on Laser Measurement Technol
6/16
-
8/12/2019 Moving Object Tracking and Avoidance Algorithm for Differential Driving AGV Based on Laser Measurement Technol
7/16
-
8/12/2019 Moving Object Tracking and Avoidance Algorithm for Differential Driving AGV Based on Laser Measurement Technol
8/16
-
8/12/2019 Moving Object Tracking and Avoidance Algorithm for Differential Driving AGV Based on Laser Measurement Technol
9/16
-
8/12/2019 Moving Object Tracking and Avoidance Algorithm for Differential Driving AGV Based on Laser Measurement Technol
10/16
-
8/12/2019 Moving Object Tracking and Avoidance Algorithm for Differential Driving AGV Based on Laser Measurement Technol
11/16
78
Moving Object Tracking and Avoidance Algorithm for Differential Driving
AGV Based on Laser Measurement Technology
Pandu Sandi Pratama1, Sang Kwun Jeong
2, Soon Sil Park
3, Sang Bong Kim
*,1
1Department of Mechanical and Automotive Eng., Pukyong National University, Busan 608-739, Korea
2Han Sung Well Tech Co, Ltd, Busan 720-20, Korea3Ranault Samsung Motors, Busan 618-722, Korea
*Corresponding author, Tel: +82-51-629-6158, E-mail: [email protected]
ABSTRACT
This paper proposed an algorithm to track the obstacle position and avoid the moving objects fordifferential driving Automatic Guided Vehicles (AGV) system in industrial environment. Thisalgorithm has several abilities such as: to detect the moving objects, to predict the velocity anddirection of moving objects, to predict the collision possibility and to plan the avoidance maneuver.For sensing the local environment and positioning, the laser measurement system LMS-151 and lasernavigation system NAV-200 are applied. Based on the measurement results of the sensors, thestationary and moving obstacles are detected and the collision possibility is calculated. The velocityand direction of the obstacle are predicted using Kalman filter algorithm. Collision possibility, time,and position can be calculated by comparing the AGV movement and obstacle prediction resultobtained by Kalman filter. Finally the avoidance maneuver using the well known tangent Bugalgorithm is decided based on the calculation data. The effectiveness of proposed algorithm is verifiedusing simulation and experiment. Several examples of experiment conditions are presented using
stationary obstacle, and moving obstacles. The simulation and experiment results show that the AGVcan detect and avoid the obstacles successfully in all experimental condition.
1. INTRODUCTIONIn factory environment, Automatic Guided
Vehicles (AGV) is common equipment totransport the materials in production process. Toguarantee the safety of workers while the AGVmoves around inside the factory, the movingobject tracking and avoiding algorithm should
be applied on AGV. This algorithm works whenobjects suddenly pass in front of moving AGVand block the AGVs path. To avoid the collisioncondition the AGV should detect the movingobject in time and make reasonable decision toavoid the obstacle.
There are two ways to deal with movingobject in the obstacle avoiding process, the firstone does not consider the motion of object, butimprove the motion planning ability andresponding ability of AGV such as ArtificialPotential Field [1-2] and grid algorithm [3-4].Those algorithms need computation time to
replan the trajectory and only work in known
environment. The second one is to forecast therelative motion of object to AGV, and then adaptreasonable avoiding policy according to theanticipated collision time and position such as in[5-7], which is more effective for quick motionof AGV and the object. Those algorithms dontconsider the path planning but only track thegiven path. Therefore, the new algorithm is
needed.This paper proposes an algorithm based on themotion planning ability to avoid the movingobstacle using motion prediction while find theoptimal path and works even in unknownenvironment. The object tracking algorithmbased on the laser measurement result canestimate the current state and future state ofmoving obstacle using accurate distanceinformation. The data process and respondingspeed are quick. The obstacles are assumed aslinear system and the system noise is fit asGaussian distribution. Therefore, Kalman filter
based tracking is suitable for this application.
-
8/12/2019 Moving Object Tracking and Avoidance Algorithm for Differential Driving AGV Based on Laser Measurement Technol
12/16
79
For avoiding policy, the tangent Bug algorithmis proposed to avoid the obstacles and finds theshortest path to the goal position.
To verify the effectiveness of proposedalgorithm, the simulation and experiment are
done. Experiments are presented usingstationary obstacle, and moving obstacles.
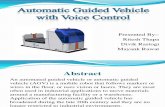
2. SYSTEM DESCRIPTIONThe AGV hardware configuration system used
in this experiment is shown in Fig.1.
NAV-200
LMS-151
Monitor
Industrial PC
BLDC motor
Battery
Fig. 1 AGV system
This AGV has dimension 60 cm x 100 cm x190 cm. This system uses differential drivesystem, powered by two 24V/300W/3000RPMBLDC motors. The laser measurement systemLMS-151 is used for measuring the environmentcondition. It has high sensitivity over the first 20m, and is suitable for measuring contours andchecking the projections of the obstacle. Thelaser navigation system NAV-200 is used forpositioning the AGV. It is free maintenance,flexible and high precision. All of the sensorsand actuator controlled by Industrial PC, and
touch screen monitor. This system is powered by
2 x 12 V 80 AH batteries. The configuration ofthe system is shown in Fig. 2.
Differential Drive
CastorWheel
LMS-151
NAV-200
Fig. 2 Configuration of AGV system
3. OBSTACLE AVOIDANCE ALGORITHM3.1 Obstacle Detector
To detect the local environment, the lasermeasurement system LMS-151 is applied toAGV as shown in Fig. 2. This sensor scans theenvironment by transmitting and receiving thelaser signal over desired area. The definition ofthis area W (R, , ) is given by R=20m, =0,=180 where R is the radius of scanning area, the start angle, and the end angle. Theresolution of laser scanning is 0.5 and scanningfrequency is 50 Hz.
AGV
0
30
60
90
120
150
180
R
x
i
d i
y
O =(d , )i ii
Object
Laser
Measurement
system
Laser
Navigation
system
Fig. 2 LMS-151 scanning area
where y is the center of laser scanner, i isthe angle between the object iO and x horizontalaxis. The detected object can be expressed withpolar coordinate as ( id , i ), or with Cartesiancoordinates as:
)s i n,c o s( iiiii ddO for ni ,...1 (1)
-
8/12/2019 Moving Object Tracking and Avoidance Algorithm for Differential Driving AGV Based on Laser Measurement Technol
13/16
80
The positioning method using NAV-200 isshown in Fig. 3.
Y
X
y x
X,Y = Absolute coordinate
system of the plant
x,y = Local coordinate
system of the AGV
D
A(A ,A )X Y
A
A
X
Y
O ix O iy
reflector
i
Fig. 3 Positioning using NAV-200
The reflector positions in absolute coordinatesystem of the plant are saved inside the AGVsmemory. By comparing the reflector scanningresult and the reflector coordinate in AGVsmemory, the absolute coordinate and orientationof AGV are obtained.
Using coordinate transformation, the absoluteposition of obstacle iO is obtained:
iy
ix
Y
X
iY
iX
O
O
A
A
O
O
cossin
sincos
s i nc o s
D (2)
where A is the absolute position of AGV, andDis distance between NAV-200 and LMS-151.
3.2 Moving Object Tracking Based onKalman Filter
In factory environment, the moving objects
are mainly persons that their accelerationschange slowly. Therefore, an uniform motionmodel can be set up with acceleration as whiteGaussian noise. The state vector of the object is
Tyx vyvx ][X and the observation
vector is Tyx ][Y where x, y are position ofthe obstacle, and yx vv , is obstacle velocities indirections of x, y, respectively.
The state equation of moving object is givenas follows:
)1()1()( kkk WAXX (3)
and measurement equation is:
)()()( kkk VCXY (4)
where W is Gaussian process noise and V isGaussian measurement noise.The state parameters for dead reckoning can
be given as:
1000100
0010001
T
T
A ,
1000
0010
C
Since measurement parameters are distanceand directional angle, the real measurementequation can be expressed as:
)(s i nc o s
)()(
)( kdd
kykx
kii
iiVY
(5)
For the human motion, the covariance matrixof process noise can be determined by thefollowing [8]
a
T
Tk
T
TT
T
TT
2
22
2
3
32
2
2
2
3
3
00
00
00
00
)(W (6)
where a is factor determined by acceleration,and T is observation period. The covariancematrix of direct observation is:
2
2
0
0)(
kV (7)
Then following the Kalman filter equationsthe next step motion state of object can beestimated using prediction and update laws asfollowing.
Prediction:
)1|1()1()1|( kkXkAkkX (8)
)1()1|1()1()1|( kAkkPkAkkP T
)1( kQ (9)
-
8/12/2019 Moving Object Tracking and Avoidance Algorithm for Differential Driving AGV Based on Laser Measurement Technol
14/16
81
Update:
)1|()|( kkXkkX )]1|()()()[( kkXkCkZkK (10)
)()1|()( kCkkPkK T
1)]()()1|()([ kRkCkkPkC T (11)
)1|()]()([)|( kkPkCkKIkkP (12)
3.3 Collision Possibility Prediction
Based on the obstacle movement prediction byKalman filter, the collision possibility ispredicted. When the AGV velocity is AV , andthe predicted obstacle velocity is OV , therelative velocity between the obstacle and the
AGV is:
AOOA VVV (13)
The collision condition estimates byprojecting the obstacle to the AGV dimension.To simplify the calculation, only the edges ofobstacle and the nearest point from the obstacleto AGV are calculated.
AB
C
D
EF
G
x
y
VOA
AGV
A
B
C
d
d
d
1
2
3
ll
l
12
3
1 2 3
Fig. 4 Obstacle projection
The obstacle line projection equation isobtained by:
iiii
O A x
O A yddx
V
Vy s i n)c o s( (14)
for ,...3,2,1i
If one of three line projections intersects with
one of AGV dimension line (DE, EF, FG, GD),
the collision possibility is high. The shortestdistance between AGV and obstacle is:
),,m i n ( 321m i n llll (15)
The anticipated collision time is:
OA
cV
lt min (16)
and anticipated collision position is:
),( cAycAxc tVtVP (17)
3.4 Obstacle Avoidance Policy
Based on the collision possibility calculation,the obstacle avoidance policy is generated. Toavoid the obstacle and find the shortest path tothe goal, the tangent bug algorithm is applied.This algorithm is suitable for AGV using lasermeasurement system and also it guarantees theAGV so as to reach the goal position. Onlybased on the start position and goal positioninformation, the AGV can find the path andavoid the obstacles efficiently. In Fig. 5 whenthe AGV finds the stationary obstacle, thealgorithm calculates the distance between thepoint iO and goa l
q. The AGV then goes to the
shortest point to get the optimal path.
goalq
O1
O2
O3
O4
W1
W2
startq
Planed Path for
obstacle avoidance
Fig. 5 Tangent Bug algorithm
When the moving obstacle is detected, theAGV reduces or increases the speed. Theincreasing speed policy is adopted if thefollowing condition
LACtVV cAnowA )( max (18)
where maxAV is AGVs maximum velocity,
AnowV is AGVs current velocity, ct collision
time, AC obstacle size, and L save distance.
-
8/12/2019 Moving Object Tracking and Avoidance Algorithm for Differential Driving AGV Based on Laser Measurement Technol
15/16
82
When this condition is not satisfied, the AGVstops to avoid the collision condition.
4. SIMULATION AND EXPERIMENTALRESULTS
4.1 Simulation Results
The simulation environment of obstacleavoidance using stationary obstacle and movingobstacle are shown in Fig. 6.
Moving
Obstacle
StationaryObstacle
Start Goal
AGV
Fig. 6 Simulation environment
Fig. 7 shows the simulation results usingstationary and moving obstacles when the AGVreaches the goal position.
Start
Goal
Stationary
obstacle
Stationary
obstacle
Moving
obstacle
Start Goal
(a) (b)
GoalStart
Moving
obstacle
(c)
Fig. 7 simulation results for stationary and
moving obstacles
Fig. 7 (a) shows the simulation result using 2static obstacles. Fig. 7 (b) shows the result usingmoving obstacle with transversal direction. Fig.7 (c) shows the result using moving obstaclewith longitudinal direction.
4.2 Experimental Results
This experiment is given to demonstrate thealgorithm in real factory environment. Thestationary obstacle experiment is shown in Fig. 8.Fig. 8(a) shows that the AGV detects theobstacle and decides the next point. In Fig. 8(b)the AGV goes to the next shortest point to goal.In Fig. 8(c) the AGV passes the obstacle andgoes to the goal position.
(a) (b) (c)Fig. 8 Stationary obstacle avoidance
Fig. 9 shows the moving obstacle experimentin transversal direction. Fig. 9 (a) shows when
the obstacle approaches, the adopted Bugalgorithm calculates the velocity and decides theavoidance maneuver. The AGV decides to stopuntil the obstacle disappears as in Fig. 9 (b).Then AGV is moving continuously to goalposition as in Fig. 9 (c).
(a) (b) (c)Fig. 9 Moving obstacle avoidance in transversal
direction
Fig. 10 shows the moving obstacleexperiment in longitudinal direction. Fig. 10(a)shows when the obstacle approaches, thealgorithm calculates the velocity and decides theavoidance maneuver. The algorithm decides toavoid the obstacle as in Fig. 10(b). Then AGV ismoving continuously to goal position as in Fig.10(c).
-
8/12/2019 Moving Object Tracking and Avoidance Algorithm for Differential Driving AGV Based on Laser Measurement Technol
16/16
83
(a) (b) (c)Fig. 10 Moving obstacle avoidance in
longitudinal direction
Figs. 11-13 show the trajectory of the AGVafter reaching the goal position using simulationand experimental data.
0
1
2
3
0 1 2 3 4 5 6 7 8
Simulation
Experiment
m
m
Fig. 11 Simulation and experiment trajectories
for stationary obstacle avoidance
0
1
2
3
0 1 2 3 4 5 6 7 8
m
m
Simulation
Experiment
Fig. 12 Simulation and experiment trajectoriesfor moving obstacle in transversal direction
0
1
2
3
0 1 2 3 4 5 6 7 8
Simulation
Experiment
m
m
Fig. 13 Simulation and experiment trajectoriesfor moving obstacle in longitudinal direction
Figs. 11-13 show that the simulation andexperimental results are similar. The proposedalgorithm can get successfully the right decisionto avoid the obstacle. The reaction is fast enoughto prevent the collision condition.
5. CONCLUSIONSThis paper proposed an algorithm to detect the
environment quickly and reasonably to avoid the
stationary and moving obstacles in factoryenvironment such as human moving fordifferential AGV system. The Cartesiancoordinate of obstacle in absolute coordinatesystem is obtained from laser scanner LMS-151measurement data. The Kalman filter basedobject tracking method was considered for theprediction of the AGV and obstacle speeds,which can improves the accuracy and obstacleavoidance ability. Based on object trackingalgorithm, the collision possibility, collision timeand position were estimated. Finally, based onthe obstacle avoiding policy, the obstacleavoidance maneuver was generated. Thesimulation and experiment results show that theAGV can get successfully the right decision toavoid the obstacle. The reaction is fast enough toprevent the collision condition.
ACKNOWLEDGEMENT
This research was supported by a grant fromConstruction Technology Innovation Program(CTIP) funded by Ministry of Land,Transportation and Maritime Affairs (MLTM) ofKorean government.
REFERENCE
1. Y.X. He, S.P. Fan, Computer Engineeringand Applications, Vol. 41, (2005), pp. 66-68.
2. L. Tang, A Novel Potential Field Method forobstacle Avoidance and Path Planning ofMobile Robot, IEEE (2010).
3. Elfes, IEEE Journal of Robotics andAutomation, Vol. 3, (1987), pp.249-265.4. J. Borenstein, Y.Koren, Journal of Roboticand Automation, Vol. 4 (1988), pp. 213-218.
5. H.Y. Shi, C.Z. Sun, Robot, vol.26, (2004),pp. 27-31.
6. X.J. Shen, J.M. Pan, Computer Simulation,Vol.21, (2004), pp. 73-78.
7. R.A. Hamzah, H.N. Rosly, S. Hamid, AnObstacle Detection and Avoidance of AMobile Robot with Stereo Vision Camera(2011).
8. F. He, Z. Du, Laser Range Finder BasedMoving Object Tracking and Avoidance in
Dynamic Environment (2010).