MOTIVATING PERSISTENCE IN THE FACE OF FAILURE: THE …yw409rc6957/Chase_Dissertatio… · Figure...
206
MOTIVATING PERSISTENCE IN THE FACE OF FAILURE: THE IMPACT OF AN EGO-PROTECTIVE BUFFER ON LEARNING CHOICES AND OUTCOMES IN A COMPUTER-BASED EDUCATIONAL GAME A DISSERTATION SUBMITTED TO THE SCHOOL OF EDUCATION AND THE COMMITTEE ON GRADUATE STUDIES OF STANFORD UNIVERSITY IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY Catherine Chase August 2011
Transcript of MOTIVATING PERSISTENCE IN THE FACE OF FAILURE: THE …yw409rc6957/Chase_Dissertatio… · Figure...

MOTIVATING PERSISTENCE IN THE FACE OF FAILURE: THE IMPACT OF
AN EGO-PROTECTIVE BUFFER ON LEARNING CHOICES AND OUTCOMES
IN A COMPUTER-BASED EDUCATIONAL GAME
A DISSERTATION
SUBMITTED TO THE SCHOOL OF EDUCATION
AND THE COMMITTEE ON GRADUATE STUDIES
OF STANFORD UNIVERSITY
IN PARTIAL FULFILLMENT OF THE REQUIREMENTS
FOR THE DEGREE OF
DOCTOR OF PHILOSOPHY
Catherine Chase
August 2011

http://creativecommons.org/licenses/by-nc/3.0/us/
This dissertation is online at: http://purl.stanford.edu/yw409rc6957
© 2011 by Catherine Chi Chase. All Rights Reserved.
Re-distributed by Stanford University under license with the author.
This work is licensed under a Creative Commons Attribution-Noncommercial 3.0 United States License.
ii

I certify that I have read this dissertation and that, in my opinion, it is fully adequatein scope and quality as a dissertation for the degree of Doctor of Philosophy.
Daniel Schwartz, Primary Adviser
I certify that I have read this dissertation and that, in my opinion, it is fully adequatein scope and quality as a dissertation for the degree of Doctor of Philosophy.
Paulo Blikstein
I certify that I have read this dissertation and that, in my opinion, it is fully adequatein scope and quality as a dissertation for the degree of Doctor of Philosophy.
Carol Dweck
I certify that I have read this dissertation and that, in my opinion, it is fully adequatein scope and quality as a dissertation for the degree of Doctor of Philosophy.
Deborah Jane Stipek
Approved for the Stanford University Committee on Graduate Studies.
Patricia J. Gumport, Vice Provost Graduate Education
This signature page was generated electronically upon submission of this dissertation in electronic format. An original signed hard copy of the signature page is on file inUniversity Archives.
iii

iv
ABSTRACT
This research begins to explore motivational supports for learning from failure
situations. Failure often presents a valuable learning opportunity, and in fact, many
instructional models have capitalized upon it. However, in order to learn from their
mistakes, students may need motivational scaffolds to protect them from the negative
psychological ramifications of failure.
This work explored the effectiveness of a motivation-based intervention called
an ego-protective buffer (EPB), that was designed to enhance persistence after failure.
An ego-protective buffer (EPB) maintains a stable sense of competence by lessening
the impact of failure on one’s psyche. The specific instantiation of an EPB tested here
was designed to elicit a combination of internal and external attributions for failure.
External attributions protect one’s sense of competence by averting the blame for
failure away from the self. This should discourage one from quitting the task. At the
same time, this ego-protective buffer invites some internal attributions, which
encourages students to take some responsibility for remedying the failure situation.
Based on this theory, we embedded an EPB into the rule structure of a
computer-based genetics game and unleashed it on 143 seventh graders. In the EPB
condition, students were told that winning in the game was a probabilistic outcome,
dependent on a combination of chance and skill on the part of the students. In the
Control condition, students were told that winning in the game was a deterministic
outcome, dependent on students’ skill only. Students played the game during two
class periods. Measures include pre- and posttests, motivational survey measures, and
in-game behaviors.
The EPB did have an effect on learning, but only amongst high-failing
students. High-failing EPB students learned just as much as their low-failing
counterparts. This was not so in the Control condition, where high-failing students
learned far less than their low-failing counterparts. So the high-failing EPB group was
behaving as if they were “buffered” from the effects of failure. We also found
evidence of a possible mechanism behind this learning effect. In the high-failing EPB
condition, students were equally likely to persist after success and failure, while in the

v
Control condition, students were far more likely to persist after success, exhibiting risk
averse behaviors. This difference was more exaggerated in a within-subjects
comparison, contrasting the same individuals in situations of high and low failure.
Finally, persistence after failure was associated with learning across the full sample of
subjects. Regardless of condition or failure rate, students who persisted more after
failure also learned more. This study, together with the author’s related body of work,
provides compelling evidence that the EPB is a viable intervention for encouraging
persistence in the face of failure.
This study also made some headway in pioneering new measures of learning
process and motivational behaviors. In this study, behavioral measures of persistence
after failure were able to predict learning gains. However, no motivational survey
measures could predict the persistence after failure behaviors. This suggests that these
behavioral measures can provide us with some unique functional measures of
motivation that adaptable learning environments could target for intervention.

vi
ACKNOWLEDGEMENTS
This dissertation was the work of many fine people. I would like to thank my
advisor, Daniel Schwartz, for his undying support in every single aspect of this work!
And certainly this research could not have been completed without the help of Doris
Chin and Ilsa Dohmen, who provided feedback in the design of the game, helped to
administer the study, and helped to code some of the data. The game would not have
been possible without Henry Kwong, our trusty programmer, who magically built and
maintained the game, the database, and a data-searching interface. My dissertation
support group (Marily Oppezzo, Karin Chapin, Kathleen O’Connor, Lindsay Oishi,
Maryanna Rogers, and Heidy Maldonado) offered incredible feedback and unfailing
support throughout the entire process. My family and friends (especially Adam
Royalty) were essential in helping me get through this monster of a dissertation.
Finally, I would like to thank Kimi Schmidt and her students, who were gracious
enough to participate in this study!

vii
TABLE OF CONTENTS
Chapter 1 Introduction 1 Chapter 2 Relevant prior research 21 Chapter 3 Methods 34 Chapter 4 Effects of treatment on learning and persistence: A four-
pronged analysis 51
Chapter 5 Behaviors before and after success and failure 78 Chapter 6 Pre-existing individual differences as predictors of in-game
behaviors and learning outcomes 90
Appendix to Chapter 6 114 Chapter 7 Choices of discrete events 120 Appendix to Chapter 7 129 Chapter 8 Discussion 132 Chapter 9 Reflections, implications, and future directions 142 Appendix 158 References 192

viii
LIST OF TABLES
Number Title Page
Table 2.1 Partial correlations with posttest for the Unscaffolded condition, removing variance due to pretest and number of fails
33
Table 3.1 Condition assignment by period and day 43 Table 3.2 Interview questions 44 Table 4.1 Average scores on pretest, posttest, learning gains, and transfer
items 55
Table 4.2 Calculation of learning gain scores 56 Table 4.3 Correlations between learning gains and rates of success- and
fail-abandon, overall and split by condition 59
Table 4.4 Correlations between the rates of success- and fail-abandon and
learning gain scores, broken out by condition and high- and low-failers
65
Table 4.5 Summary of findings from four data analyses, addressing three
research questions 75
Table 5.1 Rates of various types of responses to success and failure, split
by condition and high/low failers 80
Table 5.2 Rates of actions preceding success and failure, split by
condition and high/low failers 83
Table 5.3 Correlations between learning gains and events preceding
success and failure 86
Table 6.1 Reliability analyses for each motivation scale 94 Table 6.2 Average ratings on motivation measures given prior to
treatment 95
Table 6.3 Correlations between motivation measures, prior achievement,
and learning gains 95

ix
Table 6.4 Correlations between motivation measures and persistent behaviors in the game
114
Table 6.5 Correlations between measures of motivation and pre- and post-
treatment learning measures, split by condition 98
Table 6.6 Correlations between motivation measures and persistent
behaviors in the game, split by condition 114
Table 6.7 Average ratings on motivation measures, split by high and low
learners 99
Table 6.8 Correlations between motivation measures and pre and post
learning measures, broken out by high and low failers 115
Table 6.9 Correlations between motivation measures and persistent
behaviors, split by high and low failers 115
Table 6.10 Correlations between motivation measures and learning
measures, split by condition and high/low failers 116
Table 6.11 Correlations between motivation measures and in-game
behaviors, split out by condition and high/low failers 117
Table 6.12 Means and SEs of prior achievement and prior knowledge
measures, split by condition and high/low failers 104
Table 6.13 Correlation matrix relating pre- and post-treatment learning
measures 105
Table 6.14 Correlations between persistence behaviors and pre- and post-
treatment measures of learning 106
Table 6.15 Correlations matrix of pre- and post-treatment learning
measures, split by condition 107
Table 6.16 Regression results testing condition, science grade, and their
interaction 107
Table 6.17 Regression results testing condition, failure rate, and their
interaction 108
Table 6.18 Correlations between learning measures and behaviors
preceding success and failure, split by condition 109

x
Table 6.19 Correlation matrix between pre- and post-learning measures, split by high and low failers
110
Table 6.20 Correlations between persistence behaviors and pre- and post-
treatment learning measures, split by high/low failers 118
Table 6.21 Correlation matrix of pre- and post-learning measures split by
condition and high/low failers 111
Table 6.22 Correlations between pre and post learning measures and
responses to failure, split by condition and high and low failers 119
Table 7.1 Sums and proportions of choices and failures 122 Table 7.2 Correlations between choice types and learning learning gains 129 Table 7.3 Sums and proportions of in-game choices and failures, split by
condition 129
Table 7.4 Correlations between proportions of discrete choices and
learning gains 129
Table 7.5 High and Low failers’ mean sums and proportions of choices 125 Table 7.6 Correlations between proportions of discrete choices and
learning gains, for low and high failers 130
Table 7.7 Proportions of various activities by high/low failers and
condition 130
Table 7.8 Correlations with learning gain score by high/low failers and
condition 131

xi
LIST OF ILLUSTRATIONS
Number Title Page
Figure 1.1 Achievement attributions categorized by locus, stability, and controllability 5
Figure 2.1 Screenshot of Betty’s Brain concept-mapping interface 23 Figure 2.2 Screenshot of the Triple-A Game Show and chat window 24
Figure 2.3 Posttest scores broken out by item type, achievement level, and condition 26
Figure 2.4 Set-up of learning choices for the Scaffolded condition 31 Figure 3.1 Homepage of Mendel’s Galaxy 37 Figure 3.2 Example puzzle 38 Figure 3.3 Hierarchy of game choices 39 Figure 3.4 Failure message screens for EPB and Control conditions 42 Figure 3.5 Sample post-test items 47 Figure 4.1 Rates of fail-abandon and success-abandon by condition 58 Figure 4.2 Histograms of failure rates by condition 61 Figure 4.3 Learning gain scores by condition by high- versus low-failers 62 Figure 4.4 Scatterplots of failure rate by learning gain for each condition 63
Figure 4.5 Abandonment after success and failure by condition and high- versus low-failers 64
Figure 4.6 Learning gains by high/low failure situations by condition 67
Figure 4.7 Rates of abandonment after success and failure split by condition and high/low failure situations 69
Figure 4.8 Learning gain by condition and high/low prior knowledge situations 72

xii
Figure 4.9 Rates of abandonment after success and failure split by condition and high/low prior knowledge situations 73

1
CHAPTER 1: INTRODUCTION
Students encounter many learning failures throughout their school careers.
Whether solving a math problem, coming up with an idea for an essay, or writing a
computer program, students’ first attempts often fail. Learning failures, however
small, are an inevitable part of education.
To learn from these failure situations, students must persist, and they must
persist productively. We consider these two issues separately. The first half of this
chapter explores the motivational mores of why people do or do not persist after
receiving negative evaluations. According to attribution theory, persistence after
failure is strongly influenced by the perceived cause of the failure. While much of the
literature in this space has defined stark dichotomies between attribution types, we
argue that people can assign multiple causes to outcomes, and that this can be a
healthy response to failure. We suggest a possible intervention (the ego-protective
buffer) based on this idea and propose an experiment to test its effect on persistence.
But even when students do persist after failure, they may not engage in the
kind of persistence that is productive for learning. If students perseverate on failing
strategies or select poor learning behaviors, their learning will stagnate and they will
continue to confront failure. The second half of this chapter attempts to characterize
the types of learning behaviors that comprise productive persistence. Models of self-
regulated learning offer some guidance in this effort, however there is little evidence
connecting specific self-regulated learning behaviors to learning outcomes.
Computer-based measures of help-seeking behaviors have made headway in this
regard, but they are limited in scope because the computer exerts a high level of
control over students, which restricts opportunities for self-regulated learning.
Moreover, help-seeking and self-regulated learning have not been studied from the
perspective of failure. To fill this gap, we propose a descriptive analysis to
characterize the types of behavioral moves students make following failure in a
choice-filled environment. We will then attempt to empirically derive which
behaviors are productive by relating specific behaviors to learning outcomes.

2
What is failure?
Failure comes in many shapes and sizes, but it always begins with a goal.
Failure occurs when the goal is not met. The goal can be self-adopted (e.g. I want to
learn Chinese) or assigned (e.g. homework). It can be large (e.g. completing high
school) or small (e.g. getting this question right). And, of course, the goal can be
situated in different contexts like sports or shopping. This dissertation considers
failure in the context of learning and achievement. We further confine the discussion
to “micro” failures that occur at the level of answering a question incorrectly, solving
a problem incorrectly, or failing a low-stakes quiz.
A situation becomes a failure only when one perceives that the goal has not
been met. Both external (e.g. a grade) and internal (e.g. I don’t know how to begin
this problem) feedback can indicate failure. Also, failure is not always black and
white; there are different degrees of failure. Scoring 10 points out of 100 on a quiz is
a far more catastrophic failure than scoring 75 points. This adds issues of relative
standards and expectations to the perception of failure. Some students view a score of
75 as a failure, while others see it as a triumph. This paper simplifies the discussion of
failure to an all-or-nothing outcome and deals largely with failure that is defined by
salient external feedback.
Learning from failure
Failure can provide useful feedback for learning. Failure denotes a problem in
meeting the learning objective. It draws one’s attention to a knowledge gap, a flaw in
understanding, or a computational mistake. Failure can also serve as a call-to-action,
triggering the learner to remedy the error, modify one’s understanding, or revise one’s
work. In the view advanced in this paper, failure can be a valuable learning
opportunity.
Some even use failure as a productive learning tool. For instance, scientists
often make new discoveries when experiments come out differently than predicted. In
a study of a molecular biology lab, Dunbar (1999) found that biologists paid particular

3
attention to evidence that indicated their theories were failing. Asking why these
results had occurred often pushed them to generate novel theories and innovations in
their field. The same principle applies for children learning in school. Japanese math
teachers make students’ problem-solving mistakes a focal part of their instruction
(Stigler & Hiebert, 1999). Likewise, Italian math teachers encourage students to self-
correct their errors rather than give them the answer, as American teachers are wont to
do (Santagata, 2005).
Learning activities can be designed to capitalize on the idea that students learn
from making or analyzing mistakes. For instance, Siegler (2002) found that asking
students to explain both incorrect and correct solutions led to greater rates of transfer
than explaining correct solutions alone. Schwartz & Martin (2004) and Kapur (2008)
have created activities that lead to productive failure, where students generate several
solutions to a complex, open-ended problem. While students rarely generate workable
solutions, they are well prepared to learn the correct solution and its attendant
concepts, when they are later explained to them. Blair (2009) found that students
learn through “implication feedback” where students see the consequences of their
errors and begin to diagnose the misconception in their mathematical problem-solving.
Finally, Vanlehn et al. (2003) found evidence for “impasse-driven learning”, where
students learn more from tutor explanations given after they have reached an impasse
compared to before. This body of work points to the idea that failure can produce
fertile grounds for robust learning. But in order to learn from failure, students must be
able to cope with the failure itself and persist, despite difficulty.
Motivating Persistence after Failure
Failure is almost never enjoyable. The experience of failure is associated with
negative emotion, lowered self-esteem, reduced intrinsic motivation, and lower
expectancies of future success (Covington & Omelich, 1981; Reeve, Olson, & Cole,
1985; Vallerand, Gauvin & Halliwell, 1986). Repeated failure can lead to learned
helplessness and even depression (Bandura, 1997; Peterson, Maier, & Seligman,
1993). A common self-protective response to failure is to quit the task entirely,

4
avoiding the risk of future failure and all its negative ramifications. But quitting the
task impedes learning. People need motivational resources to support persistence after
failure, so they can continue to learn.
Persistence has been explored by several different motivational theories and
constructs, each of which has a different explanation and set of predictions for
persistence in the face of failure. For instance, Bandura’s social cognitive theory
predicts that individuals who are high in self-efficacy are more resilient after failure
because they believe they are capable of performing the tasks necessary for success
(Bandura, 1997). Likewise, theories of intrinsic motivation claim that individuals with
high levels of intrinsic motivation for a given task will persist after failure because
they enjoy the task in its own right (Deci & Ryan, 1985). Achievement goal theories
predict that relative to performance-oriented individuals, individuals who adopt a
mastery goal will be less likely to give up after failure because they are less interested
in “looking good in the eyes of others” and are more interested in learning the material
(Ames & Archer, 1988; Dweck, 1986). While these theories all make valid points, we
contend that the perceived cause of failure is critical in shaping the choice to persist or
quit. Attribution theory provides the most direct theoretical account of the perceived
cause of failure.
Attribution theory and the perceived cause of failure
Attribution theory works on the assumption that individuals are motivated to
master tasks in their environment (Weiner, 1986). To gain control over their
environment and themselves, they try to understand why outcomes occur by
generating attributions, which are hypothesized causes for past events. People tend to
make causal attributions for events that are unexpected, significant, or negative. These
attributions have psychological consequences such as altered expectancies of success,
self-efficacy, and emotions, which in turn affect behaviors like persistence, effort, and
choice.
Attributions can be characterized along three dimensions: locus, stability, and
controllability (Weiner, 1986). The locus of the attribution designates whether the

5
cause of an outcome is internal or external to the person. The stability dimension
refers to whether the cause is permanent or likely to change. Controllability refers to
whether the individual has the power to change the outcome. Each attribution has
characteristics along all three dimensions and can be classified in the 2 x 2 x 2 matrix
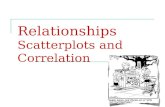
shown in Figure 1.1. Most attributions in achievement situations fall into one of four
categories: luck, effort, task difficulty, and ability.
Internal External Controllable Uncontrollable Controllable Uncontrollable
Stable long-term effort
fixed ability teacher bias* task difficulty
Unstable short-term effort, skill, strategy
illness help from others*
luck
Figure 1.1. Achievement attributions categorized by locus, stability, and controllability. These dimensions have been confirmed through both rational and empirical (e.g. factor) analyses (Weiner, 1986). We have italicized the four most common attributions for achievement. *The starred causes are controllable by others (i.e. the teacher) but are not controllable by the person making the attribution. Figure adapted from Weiner, 1979.
The dimensions of an attribution determine persistence in the face of failure.
For instance, if a student believes she earned a bad grade on her physics test because
physics is a hard subject, then she has attributed the poor grade to an external, stable,
and uncontrollable cause. The subject of physics is external to the student, she cannot
control it, and it is not going to change. In this case, the student can do nothing to
improve her grade, so there is no logical recourse other than to give up trying.
However, if instead, she believes her bad grade was due to low short-term effort on
her part, then the attribution is internal, unstable, and controllable. In this situation the
student would be likely to persist by studying harder for the next test.
How do people generate attributions? The attribution an individual forms for a
past event depends on a number of environmental and personal factors (Weiner,
1986). For instance, there are individual differences in attributional styles, such that
some individuals may be more prone to attribute negative outcomes to internal,
uncontrollable, and stable causes (Peterson et al., 1982). Other individual differences
that could affect attributions are prior knowledge and causal schemas and scripts.

6
Environmental factors that include social norms and the specifics of a given situation
can also influence attributions. For instance, if many people in a class perform poorly
on a test, a student is likely to attribute her failure to the difficulty of the test rather
than to her own ability. Given that both individual differences and environmental
factors affect attributions, interventions can target either the person or the situation.
The intervention proposed here uses aspects of the environment to influence students’
perception of failure.
What kinds of attributions will enhance or hinder persistence?
What kinds of attributions for failed outcomes hinder persistence? Most
attribution theorists agree that attributions to uncontrollable causes should be avoided.
In a classic experiment by Seligman & Maier (1967), one group of dogs received
inescapable shocks while another group learned to avoid the shocks by pressing a bar.
Twenty-four hours later, both groups received shocks that could be avoided by
jumping. The bar-pressing group tried many different behaviors to avoid shock and
eventually learned to jump. The other group did not attempt to escape the shock;
many of the dogs lay there passively and accepted it. Learned helplessness occurs
when individuals perceive no relationship between their behavior and the negative
event, rendering the outcome uncontrollable. Learned helplessness can also be
provoked in humans by exposing them to unsolvable problems. In one study, adults
worked on either unsolvable problems, solvable problems, or no problems (Hiroto &
Seligman, 1975). They were then exposed to an uncomfortable loud noise that could
be turned off by the push of a button. Subjects in the unsolvable problem condition
failed to escape the noise, while the other subjects readily pressed the button.
Supposedly, the learned helplessness individuals did not attempt to press the button
because they believed that their behaviors were independent of the negative outcome.
One uncontrollable attribution that is fairly common in achievement situations
but also incredibly maladaptive, involves blaming aptitude or fixed ability. Fixed
ability is stable, uncontrollable, and internal. This means there is nothing the student
can do about it, the situation is not going to change, and the child is stuck with her

7
inborn intelligence. Diener and Dweck (1978) compared helpless and mastery
children’s response to failure at discrimination problems. The helpless children
attributed failure to uncontrollable factors like lack of ability or task difficulty, used
less effectual strategies, and engaged in fewer self-monitoring behaviors. In contrast,
the mastery children made very few attributions and instead made more strategy-
monitoring statements. Diener and Dweck concluded that mastery children were less
interested in dwelling on past failures and more interested in ensuring future mastery
of the task. The helpless children’s attributions to uncontrollable causes, on the other
hand, gave them little incentive to exert effort, which produced undesirable learning
behaviors.
If attributions to uncontrollable causes hinder persistence, which attributions
enhance it? Most attribution theorists agree that effort is the healthiest attribution for
people to make after failure. It diverts the cause of failure away from low ability
while still placing responsibility on the self and encouraging continued work on the
task (Schunk, Pintrich, & Meece, 2008; Weiner, 1979). In other words, effort is an
internal, controllable, and unstable attribution; it contains all the ingredients for
persistence after failure. Dweck (1975) taught helpless children to attribute failure to
effort and compared them to children who only experienced success. The success-
only group’s performance deteriorated after failure, but the helpless children’s
performance either improved or stayed the same. Other interventions that encourage
effort or strategy attributions have enhanced children’s learning and performance as
well (Relich, Debus, & Walker, 1986; Schunk, 1982). Presumably, attributing failure
to effort encourages students to exert greater effort in the future, which often translates
to persistence.
Some scholars argue that the healthiest attribution to make is the most credible
one. Schunk, Pintrich, & Meece (2008) advise teachers to give students realistic
feedback for failure outcomes because students may discount the feedback if it is not
plausible. For instance, if a student does poorly despite exerting tremendous effort,
and the teacher tells the student to try harder, this can lead the student to disregard the
teacher’s feedback altogether. Blumenfeld et al. (1982) also argue for clear and

8
accurate feedback that will allow students to focus on the skills and knowledge they
need to improve. We contend that realistic attributions – which often fall into multiple
categories – can be healthy for learning and persistence.
Blended attributions
Attribution theory has made a significant contribution to our understanding of
motivational responses to success and failure. The dimensions of locus, stability, and
controllability have predictive power, and they aptly classify attributions along three
distinct characteristics. At the same time, the elegance of the framework has led to
interventions that treat categories within a dimension as mutually exclusive when, in
real life, they are not.
One reason attribution categories are not mutually exclusive is that a single
event can have many causes, which even young children know (Leddo, Abelson, &
Gross, 1984). In many surveys that measure attributions, children are asked to rate the
likelihood of several different causes for the same achievement outcome. They often
rate each of these causes as likely or even highly likely (Elig & Frieze, 1979; Frieze &
Bar-Tal, 1980). And of course, most adults and children by the age of twelve believe
that their performance in school is largely a result of both effort and ability (Nicholls,
1990). This evidence suggests that people naturally make multiple attributions for an
outcome, which is sensible given that in reality, all outcomes have multiple causes.
One study of failure attributions found that experts assign both internal and
external causes to failure when working within their domain of expertise (Chase, in
press). In this study, experts in math and English attempted difficult tasks in both
math and English domains. As expected, the experts persisted less and also made less
progress at the out-of-domain task. While working out-of-domain, experts
spontaneously made internal attributions for failure. Prototypical comments include “I
don’t have the skills to do this” and “I’ve never been good at math.” But when
working in-domain, they made a mixture of internal and external attributions for
failure, including “I should know this” and “this poem is horribly written”. These data

9
suggest that people do, under some circumstances, spontaneously attribute failure to
multiple causes simultaneously.
Experts are an interesting case for the study of persistence. They are not only
experts at what they do; they are also motivational experts at what they do. Experts
put in 10,000 hours of effortful, deliberate practice, where they strategically place
themselves in failure situations and learn from them (Bereiter & Scardamalia, 1992;
Chase & Simon, 1973; Ericsson, 2002). If the experts in this study made a
combination of internal and external attributions for failure – then perhaps this is a
productive motivational behavior. Of course, there are probably many reasons why
the experts persisted longer at the task in their domain, including high self-efficacy,
intrinsic interest, and prior knowledge. However, we would like to consider the
possibility that a combination of internal and external attributions also helped these
experts to persist in the face of failure.
Can a combination of internal and external attributions enhance persistence?
Why might a combination of internal and external attributions enhance
persistence? Let us begin by discussing the beneficial effects of external attributions.
Attributing failure to external causes is a common response to failure, and some have
argued that it is serves to protect the self. The locus of attribution is known to affect
self-esteem or self-worth (Weiner, 1986; Covington & Omelich, 1981). Attributing
failure to internal causes tends to lower self-esteem, and people tend to avoid
situations that lower their feelings of self-worth (Rhodewalt et al., 1991). On the other
hand, attributing failure to external causes maintains self-esteem and should decrease
the likelihood that a learner will avoid the failure situation by giving up on the task.
For example, giving “excuses” for negative personal outcomes – the purest form of
which is an external attribution – is beneficial for maintaining self-esteem and positive
affect while reducing anxiety and depression (Snyder & Higgins, 1988; Schlenker,
Pontari, & Christopher, 2001). Snyder and Higgins (1988) argue that external
attributions take the focus off the self and free up attentional resources that can be
used towards the task.

10
Attributing failure to external causes is part of the naturally occurring “self-
serving bias.” The self-serving bias is the tendency to attribute failure externally
while attributing success to internal sources. A recent meta-analysis (Mezulis, et al.,
2004) found that the self-serving bias is widespread and fairly consistent across many
cultures, ages, and various demographics. The self-serving bias has been associated
with increased happiness, less depression, better physical health, and enhanced
problem-solving (Taylor & Brown, 1988). In fact, Allport (1937) called it “nature’s
eldest law” – a natural response to success and failure that helps us maintain a positive
outlook on life.
While external attributions have many advantages for protecting a sense of
self, they do not promote persistence. External attributions take responsibility for
failure away from the learner, making personal strivings unlikely to impact future
success. For instance, some learned helpless individuals will attribute failure to task
difficulty – an external cause over which the learner has no control (Dweck, 1975).
As we have seen, this type of fatalistic attitude can be particularly damaging to
persistence. Internal attributions, on the other hand, place the responsibility for failure
on the learner’s shoulders. Some internal attributions, like effort, can drastically
enhance persistence and performance (Dweck, 1975; Relich, Debus, & Walker, 1986;
Schunk, 1982).
Is there a way to balance internal and external attributions? Ideally, students
would assign some responsibility for a failure to the environment to protect
themselves. At the same time, they would also take responsibility for the failure with
an eye towards effort, so there is a reason for them to take action and persist. These
balanced situations do exist. For instance, when authors receive a “reject-resubmit”
review on a journal submission, they can simultaneously blame the reviewers while
taking responsibility for writing the revision. By placing the blame on an external
source, the author is “freed” from the shackles of failure and all the negative
consequences that come with it. Rather than focus on protecting the self from the
unwelcome ramifications of failure, the author’s mental resources are available to
focus on the task of revision. But at the same time, the author perceives the cause for

11
failure as partially internal and remediable. This spurs persistence in the face of
failure.
It may also be possible to create school environments that support a sweet-spot
of balanced attributions that lead to more effort and persistence. In the next section,
we describe learning conditions that invite students to make a combination of internal
and external attributions for failure, which we call a type of “ego-protective buffer.”
The ego-protective buffer
An ego-protective buffer (EPB) maintains a stable sense of competence by
lessening the impact of failure on one’s psyche. There are many types of ego-
protective buffers. For instance, high self-efficacy could protect one from feeling the
negative ramifications of failure (Bandura, 1997). Attributing failure to effort can act
as an ego-protective buffer by shielding the learner from an attack on her sense of
intelligence (Dweck, 2000).
In this study, we propose that a combination of internal and external
attributions for failure could provide an EPB. External attributions for failure protect
the learner from negative self-thoughts like “I simply don’t have the ability to do this”
or “I’m stupid.” This is important because when learners focus on negative self-
thoughts, their cognitive resources are pulled away from the task at hand, and learning
is much less likely to occur. External attributions can also dissuade the learner from
engaging in self-protective behaviors like quitting the task or selecting tasks that prove
their competencies rather than grow them.
It is important to note that an EPB is not a barrier but a buffer, so it does not
entirely shield the learner from making internal attributions for failure. However,
these internal attributions serve an important function. By placing some of the
responsibility for failure in the learner’s lap, internal attributions can encourage the
learner to take action to fix the failure.
One example of this type of internal-external ego-protective buffer is found in
games. In most games, winning requires an element of luck (an external cause) but
still gives players some internal control over the outcome (using strategies or gaining

12
skills). For instance, black jack players can increase their odds of winning by using
heuristics and strategies, though there is still a huge element of chance involved. So
when players lose a round they can attribute it to bad cards, but they can also take
actions to avoid failure in the future (e.g. “stay” when cards sum to 16 or higher). This
may explain why games can be so addictive, even when people fail.
The implementation of an EPB in this study is a function of the environment
rather than a direct manipulation of students’ attributions. Many attribution-based
interventions have an adult (the teacher or experimenter) make attributions for a
student (Relich, Debus, & Walker, 1986; Schunk, 1982; Schunk, 1983). For instance,
in a study by Schunk (1983), the experimenter occasionally told students “You’ve
been working hard” as they worked on math problems. Rather than directly make the
desired attributions for the child, a situational EPB invites the child to make the
desired attributions herself, by setting up situations where both internal and external
causes for failure seem plausible.
One caveat is that the internal-external ego-protective buffer may only be
successful in environments that make two things explicit: (1) the learner has many
options to control her own performance and (2) the learner’s performance is expected
to change. These two criteria could encourage partial internal attributions to effort
rather than ability. Effort, as discussed earlier, is a much healthier internal attribution
because it is unstable and controllable, while ability, which is stable and
uncontrollable, should not enhance persistence. The learning environment used in this
dissertation study makes the controllability and instability of outcomes explicit.
In the next chapters of this dissertation, we will give concrete examples of ego-
protective buffers that were provided to students in the context of learning
interventions. The intervention we propose is designed to elicit attributions for failure
that are simultaneously internal and external, which should act as a type of ego-
protective buffer, protecting students’ sense of competence. We hypothesize that
provision of an ego-protective buffer will discourage students from giving up after
failure.

13
Understanding Productive Persistence
Persistence in the face of failure is critical, but sometimes students exert effort
on the wrong things. Often when students are motivated to persist in the face of
failure, they simply “try harder” or “work longer,” when it might be more effective to
try a new tack (Kluger & DeNisi, 1996). Intuitively, we know that good learners
persist productively after learning setbacks. When trying again or trying harder
doesn’t work, they may attempt a new strategy, seek help, or switch to a more
achievable learning goal. Productive persistence occurs when, after failure, students
choose the strategies and behavioral moves that drive towards successful completion
of the learning goal. But knowing which learning path to choose following failure is
not a simple task; it requires more than the desire to persist. It takes a sophisticated set
of self-regulated learning skills.
Self-regulated learning
The literature on self-regulated learning – though not focused on failure, per se
– explores the space of possible learning moves one can take when directing her own
learning. Self-regulated learning (SRL) is the process by which learners regulate their
cognition, behavior, and affect to meet their learning goals (Zimmerman, 1989). Self-
regulated learners plan and set goals, monitor their progress towards them, deploy and
adjust strategies accordingly, and reflect on the outcomes (Pintrich, 2004). For
example, when writing an essay, a good self-regulated learner might begin by defining
the main point of the paper, setting a goal of writing to support this point. The learner
might then select a strategy of writing a meticulous outline, planning the overall flow
of the argument and the content of each paragraph. As the learner progressed in her
writing, she would monitor her progress towards the goal of the paper and change her
process accordingly. For instance, if she noticed that the argument of the paper didn’t
quite hang together, she might redefine the main point of the paper. Finally, a good
self-regulated learner would evaluate and reflect on her final writing product. If the
final essay was not as persuasive as she had hoped, the learner might set herself a new
goal of gathering more evidence for her argument and begin the SRL cycle again.

14
The above example illustrates the four phases that are most common in SRL
models: forethought/planning/activation, monitoring, control, and reaction/reflection
(Pintrich, 2004). During the first phase, self-regulated learners set their goals, activate
prior knowledge and metacognition, and plan how they will spend their time. In the
monitoring phase, they take stock of their prior knowledge and determine whether it
will be appropriate for the task. In the control phase, learners select appropriate
strategies for meeting the goal. Finally, during the reaction/reflection phase, learners
evaluate their progress and perhaps cycle through the SRL phases again. Of course,
these phases are not always attempted in a linear fashion, and effective regulation of
learning may require adaptive selection of the appropriate phase, depending on the
outcome of the learner’s evaluation.
We are interested in self-regulated learning when the outcome of the learner’s
evaluation is negative. Once a student has reflected on the outcome and discovered
that she did not meet her learning goal, what does she do next? SRL models are not
clear on how a “good” self-regulated learner responds to negative feedback. How
does she go about navigating the phases? Does she choose to reset her goal, adopt a
new strategy, or continue to monitor her performance, in an attempt to diagnose the
problem? Does she engage in certain patterns of phase shifts? Unfortunately, few
models focus on self-regulated learning following failure, though some have attempted
to incorporate the processing of feedback (Butler & Winne, 1995). What students
actually do after failure is an open question, and this research aims to answer it.
Another question is how should students regulate their own learning after
failure in order to maximize learning? It is difficult to answer this question because
much of the SRL literature is focused on the elaboration of theoretical models rather
than empirical data collection (Winne, 2001). And of the empirical studies that do
exist, relatively few of them measure actual self-regulated learning behaviors. The
most common measures of SRL are surveys and interviews that rely on self-reports,
which may drastically differ from what people actually do in the moment (Pintrich et
al., 1993; Weinstein, Schulte, & Palmer, 1987; Zimmerman & Martinez-Pons, 1986).
There are a few think-aloud (Azevedo, Guthrie, & Siebert, 2004) and observational

15
measures (Perry, 1998; Turner, 1995) that capture actual SRL behaviors made in the
moment, but they are rare (Winne & Perry, 2000).
Computer-based measures of SRL: Examples from the help-seeking literature
A relatively new type of SRL measure involves tracking student actions in
computer-based learning environments. These new measures may lead to new
discoveries of how students regulate their learning after failure. Computer-based
measures of SRL show promise for several reasons. First, they measure actual SRL
behaviors rather than self-reports of behaviors. Second, they track SRL behaviors as
they occur, rather than retrospectively or prospectively. Third, they add a level of
precision to measures of SRL, since every “click” can be captured, documenting very
precise behavioral moves rather than general study habits. Fourth, they can capture
sophisticated sequences of behaviors that may comprise complex patterns of SRL
(such as navigating between the SRL phases). Most importantly, these measures can
tie behaviors during the learning activity to actual learning outcomes, allowing for
very precise titration of the relationship between SRL and learning. Computer-based
measures of SRL could prove very fruitful for describing the types of learning moves
students make after failure and determining which ones are productive. Moreover,
these findings could inform the design of interactive learning environments, where the
computer system could detect and respond to SRL behaviors.
The best example of successful computer-based measures of SRL comes from
the literature on help-seeking in intelligent tutoring systems. While help-seeking is
not the focus of the current work, the literature can clarify how computer learning
environments can advance our understanding of SRL. Help-seeking can be viewed as
a self-regulatory skill that involves all the components of self-regulated learning such
as monitoring progress to determine when to seek help, setting a goal for help-seeking
outcomes, selecting an appropriate help-seeking strategy, and evaluating the
effectiveness of the help (Nelson-LeGall, 1981; Newman, 1994). While most studies
of help-seeking in interactive learning environments have found that relatively few
students actually engage in help-seeking behaviors, findings have revealed some

16
interesting new phenomena (Aleven & Koedinger, 2000; Aleven et al., 2003; Mandel,
Grasel, & Fischer, 2000).
Most computer-based studies of help-seeking take place in the context of
intelligent tutoring systems. An intelligent tutoring system is a computer-based
learning environment where a learner is coached by a computer tutor as she solves
multi-step problems, usually in math domains. Most tutors offer on-demand help
systems, which allow the learner to ask for a “hint” at any time during the problem-
solving process. Hints get progressively more explicit as the student continues to ask
for help on the same problem. For instance, in an algebra tutor, the first hint might
refer the student to the relevant equation, a second level hint might show the student
an operation on that equation, and the final, “bottom out” hint would plug in the
numbers to the equation and show the correct answer. The term help-seeking, as
discussed here, encompasses all the intricacies of when, how, and why the student
requests a hint while solving a problem in an intelligent tutoring system.
Behavioral measures of this self-regulated learning skill have run the gamut
from very basic to extremely sophisticated. Regardless of where they sit on this
spectrum, measures of help-seeking behavior have proven to be fairly precise
predictors of learning outcomes. To illustrate the variety of help-seeking measures
and their predictive power, we review a selection of studies from the help-seeking
literature.
Wood and Wood (1999) examined the help-seeking behaviors of 14 and 15
year-olds as they worked with an algebra tutor called QUADRATIC. They found that
63% of the variance in posttest scores was predicted by a combination of number of
errors made, number of helps requested, and time spent per operation. When pretest
scores were partialled out, time per operation and time spent before asking for help
predicted post-test scores. An analysis of when the help occurred found that seeking
help after failing a problem step was associated with greater gains from pre to posttest.
Moreover, low gainers used the help less effectively; they often asked for help before
attempting a step, even though help after failure benefited them more. This work
showcases various types of help-seeking measures, such as number of helps, time

17
spent before help, and when help is sought. It also demonstrates how nuanced
measures of SRL behaviors can begin to uncover the complex interplay between SRL
and learning. Finally, it hints at the importance of considering failure in conjunction
with SRL.
Other work has demonstrated the importance of individual differences in help-
seeking. For instance, Renkl (2002) had adults work with a probability tutor called
SEASITE which offered both minimal and extensive explanations. He used cluster
analysis to identify four types of help users. Successful rare users had high prior
knowledge and scored well on the posttest, even though they accessed the help
features infrequently. Unsuccessful rare users had average prior knowledge but scored
poorly on the post-test and so presumably would have benefited from greater use of
the help. Mediocre users started off with average prior knowledge, asked for mostly
minimal explanations, and scored average on the post-test. Finally, successful users
started off with very low prior knowledge but asked for frequent extensive
explanations and reached an average score on the posttest. These analyses underscore
the importance of individual differences, such as prior knowledge, which are critical
factors in defining appropriate help-seeking behavior. Moreover, they add complexity
to the help-seeking picture – the type of help-seeking one engages in (e.g. seeking
minimal versus extensive explanations) influences learning.
Other work has found that progressions in help-seeking behavior indicate use
of broader self-regulated learning skills. For instance, in a study by Wood (2001),
children who used “frequent and deep levels” of hints in the EXPLAIN tutor learned
less than children who used the help as a scaffold, starting with deep level hints and
then fading this help-seeking as they became more practiced in problem-solving.
Likewise, Shute and Gluck (1996) had adults learn about electricity with the Ohm
Tutor, which offers a variety of different help tools. They found that a pattern of high-
then-low tool use was most productive, such that students who started with high tool
use and later progressed to low tool use had the greatest learning gains.
Finally, these types of behavioral measures of learner actions can reveal some
surprising findings. For instance, while many studies have found very low rates of

18
help-seeking behavior, Baker et al. (2004) discovered that a significant portion of
students engaged in what he called “help abuse.” These students “gamed the system”
by rapidly asking for every single problem hint until the tutor gave them the answer.
Baker et al. (2004) originally measured “gaming” behaviors (among other types of
behaviors) by observing students in the classroom for 20-second intervals. They
found that gaming and “talking on-task” behaviors were negatively correlated with
posttest scores, even when pretest scores were accounted for. In later work, Baker’s
group used a machine-learning algorithm to automatically detect gaming behaviors in
real time (Baker, Corbett, & Koedinger, 2004). In this case, computer-based measures
of SRL revealed some unanticipated and very poor SRL behaviors that greatly reduced
learning.
Based on Baker et al.’s work and other related findings (e.g. Aleven McLaren,
Roll, & Koedinger, 2004), Roll, Aleven, McLaren, & Koedinger (2007) built the Help
Tutor, which provides students with help-seeking hints as they solve geometry
problems. Unfortunately, the Help Tutor did not improve learning nor impact future
help-seeking behaviors. This is perhaps because the design of the Help Tutor did not
address student motivation in response to negative feedback about help-seeking errors.
A critique of help-seeking studies in intelligent tutoring systems
One critique of intelligent tutoring systems is that they do not take affective
variables like motivation into account when designing their systems. For instance,
help abuse may be a type of self-defensive behavior where students avoid failure by
simply asking for the answer (in these environments students cannot opt out of
problems they are assigned). The Help Tutor does not attempt to boost students’
motivation after receiving negative feedback nor does it encourage risk-taking. It
simply gives “cold” metacognitive hints without regard for the “hot” aspects of an
environment that may affect learning, including attributions of success and failure.
Therefore, in this study, we will compare SRL behaviors in a computerized learning
environment both with and without an ego-protective buffer. By hypothesis, this will
permit an investigation of how failure attributions influence productive persistence.

19
Another limitation of the computer tutoring studies is that they are confined to
one particular self-regulatory skill: help-seeking. This is partly an artifact of the
intelligent tutoring environment. Like a human tutor, an intelligent tutor provides
guidance by selecting problems for the student and even constraining her problem-
solving steps. A side effect of this guidance is that it greatly restricts the amount of
self-regulated learning the student can engage in. Apart from requesting hints, the
student has very little control over her own learning. However, most self-regulated
learning necessitates a tremendous amount of choice for the learner. According to
Zimmerman (1994, p. 7), “the criterion of personal choice or control is essential to the
exercise of self-regulation.” Environments that provide students with more learning
choices should provide a more complete picture of self-regulated learning that go
beyond single skills like help-seeking. For this study, we have designed a computer-
based learning environment that provides the learner with an extensive array of
choices ranging from the topic to the method of learning to the frequency of
evaluation. This will make it possible to look at sequences of choices rather than the
mere frequency of a particular choice, which in turn, should yield patterns of
productive persistence.
Conclusions
We have argued that failure is an inevitable part of learning that has both a
positive and a negative side. On the positive side, people can learn a great deal from
their mistakes, and some pedagogical styles and classroom interventions have
capitalized on this idea. On the negative side, failure can have negative consequences
for student motivation and may lead students to quit the task entirely, which impedes
learning.
Persistence after negative evaluations is critical for continued learning. One
factor that affects resilience after a learning setback is how people perceive the failure.
For instance, attributing failure to uncontrollable and internal causes like innate ability
provides no incentive for students to persist. Many attribution retraining studies
encourage students to attribute failure to low effort. We have argued for a different

20
type of attribution-based intervention in the form of an ego-protective buffer. An ego-
protective buffer helps an individual maintain a stable sense of competence in the face
of failure. The type of ego-protective buffer tested in this study invites students to
attribute failure to a combination of internal and external sources. We hypothesize
that external attributions will shield the learner’s ego from blame while internal
attributions will place the onus of remedying the failure on the student herself,
particularly in an environment that provides explicit ways to exert effort towards the
task (i.e. many learning resources and choices) and expectations that performance will
change. This study tests the impact of an ego-protective buffer on persistence after
failure.
Despite being persistent, learners may still select unproductive learning paths
or perseverate on ineffective strategies. The literature on self-regulated learning,
while not focused on failure per se, provides some guidance in describing the types of
learning behaviors students might take after negative evaluations. For instance, the
SRL literature offers many detailed models of how learners set goals, monitor their
progress, and select strategies for learning. Unfortunately, there is little empirical
evidence linking specific self-regulated learning behaviors with learning outcomes, in
part because of the lack of behavioral measures of SRL. Computer-based learning
environments offer precise, in-the-moment measures of SRL behaviors and have been
used extensively to measure help-seeking – a specific self-regulatory skill. Findings
from this research reveal some interesting relationships between SRL and learning,
though they do not relate directly to failure and the scope of the findings is limited by
the lack of student choice in many learning environments.
The study we describe in Chapter 3 explores students’ self-regulated learning
behaviors in a computer-based learning environment riddled with learning choices.
Analyses will focus on identifying which post-failure SRL behaviors are productive,
by relating them to learning outcomes. Furthermore, we will examine whether
provision of an ego-protective buffer can reduce one particularly unproductive
behavior – quitting after failure.

21
CHAPTER 2: RELEVANT PRIOR RESEARCH
In this chapter, we describe three experiments that provide the rationale for the
hypotheses in the proposed study. In the first two experiments, we contrasted two
conditions. In the Teachable Agent (TA) condition, children were given the goal of
teaching a digital pupil (a Teachable Agent) in the context of the Betty’s Brain
software learning environment. In the Self condition, students were given the goal of
learning with the aid of the same software. In Study 1, TA students chose to spend
more of their time on learning activities and they also learned more. In Study 2, TA
students were more likely to express negative affect and made a mix of internal and
external attributions for failure. They also persisted longer at the learning task,
particularly after receiving negative feedback. We hypothesize that TA students were
more persistent in the face of failure because the agent (the digital pupil) provided an
ego-protective buffer, which allowed students to blame some of the failure on the
agent, while accepting some of the blame themselves. In this dissertation study, we
explicitly test the effect of an ego-protective buffer on persistence after failure.
In study 3, eighth grade students engaged in self-regulated learning in the
context of a choice-filled genetics game. The game was carefully designed to provide
learners with many learning choices, which would allow them to engage in
unrestricted self-regulated learning. In this exploratory study, we asked which self-
regulated learning behaviors were most closely associated with learning outcomes.
An interesting finding was that the number of times students failed a level and then
abandoned it entirely (without checking a relevant help resource or playing the same
level again) was negatively predictive of learning outcomes. We hypothesize that
students who fail-abandon are attributing failure to internal, uncontrollable causes
(like low aptitude), and this leads them to give up the task entirely. Provision of an
ego-protective buffer – if effective at increasing persistence – should decrease this
fail-abandon behavior and increase learning gains. The current study will explore this
hypothesis and attempt to replicate the findings of Study 3.

22
Studies 1 and 2: Teachable Agents and the Ego-Protective Buffer
A Teachable Agent called Betty’s Brain
In both studies 1 and 2, students were learning in the context of Betty’s Brain.
Betty’s Brain is a type of Teachable Agent software where students learn by teaching
a graphical character on the computer (Biswas et al., 2005; Schwartz et al., 2007).
Each student creates her own “agent” or digital pupil and then populates its “brain”
with knowledge. Students teach their agents by building concept maps of nodes
connected by qualitative causal links; for example, ‘heat production’ increases ‘body
temperature’ (see Figure 1). Betty’s Brain is designed to help students learn causal
thinking in science domains.
A Teachable Agent (TA) is equipped with an artificial intelligence reasoning
engine which enables it to reason logically through the links it has been taught. For
instance, a TA can answer questions about the relationship between two concepts, as
demonstrated in Figure 2.1. In response to a query, the TA will respond by
successively highlighting each node and link in a causal chain as it reasons through
them. This makes the TA’s “thinking” visible to the student, who can revise her
agent’s knowledge by editing its concept map; meanwhile, the student herself learns
along the way.

23
Figure 2.1. Screenshot of Betty’s Brain concept-mapping interface. In the bottom left corner is Rockstar, a student’s agent. A sample student concept map of fever mechanisms is in the center of the frame. In the pop-up to the right of the screen, the student has asked her agent a question about the relationship between ‘temperature set point’ and ‘heat production.’ The agent has responded by highlighting its reasoning in the concept map and stating its answer in the Talk Log box.
Betty provides students with several optional learning activities that are
designed to help students understand the science content. A reading resource provides
background information on the causal relationships in the map. The map-building
features enables students to construct a diagram of their knowledge. In addition to the
query feature discussed above, there is also a quiz feature which allows students to
receive feedback on their maps. These various features are meant to engage students
in a cycle of reading, map-building, feedback, and revision.
Betty also comes with some play features like the Triple-A Game Show
displayed in Figure 2.2 – a Jeopardy-like game where students’ agents play against
one another. During the game show, the host poses a series of questions. Students
wager points on their agent’s answer while the host provides right/wrong feedback and
awards points. Betty also contains a chat feature where students can carry on a written
conversation with one another while working in the Betty software.

24
Figure 2.2. Screenshot of the Triple-A Game Show and chat window. Agents play against other agents in a Jeopardy-like game. The host poses questions which the agents answer based on their maps. The students participate by wagering points on their agent’s answer. The bottom of the screen displays the chat feature, which students can access anytime they are in Betty’s Brain.
Past studies found that Betty’s Brain led to greater learning gains than standard
practice, standard concept-mapping tools, and intelligent tutor versions of Betty
(Biswas et al, 2005; Chin et al., 2010). Anecdotal evidence from these studies
indicated that students were highly motivated to use the Betty’s Brain software and
perhaps cultivated a sense of responsibility for their agents’ learning. We wondered
whether this sense of responsibility towards another motivated students’ learning.
Studies 1 and 2 sought to address the motivational impact of social interaction with a
tutee during the process of learning. Are students more motivated to learn when they
learn for the sake of another than for themselves, and will this affect learning? Will
students respond differently to feedback when it goes toward an agent?

25
Study 1: Do students learn more for the sake of another?
In this study, 8th grade students used the Betty’s Brain software to learn how
the body generates a fever (Chase, Chin, Oppezzo, & Schwartz, 2009). The main
difference between conditions was merely the goal we gave to students on the first day
of instruction: teaching versus learning. One group of students (the TA group)
believed they were teaching their digital pupils while a second group (the Self group)
believed they were learning for themselves. TA students were told: “today you are
going to teach your agent about how the body generates a fever.” They were
instructed to “teach” their agents by creating a concept map that would represent the
“agent’s brain.” In contrast, the Self group was told: “today you are going to learn
about how the body generates a fever” by building concept maps, which was a fairly
typical learning activity for these students. Both groups used nearly identical versions
of the Betty software with an on-screen character who represented either the tutee or
the student herself, depending on condition. Sixty-two students from four different
classes participated in the experiment; intact classes were randomly assigned to
condition.
Students used Betty in the classroom over two days of instruction. For the
most part, students were given free reign to regulate their own learning; they chose
how to spend their time in the system. They could read the resources, edit the map,
take quizzes, query the map, play the game show, or use the chat tool whenever they
wanted. Students tended to bounce back and forth between these activities. Every
student action within the system was logged on a server, leaving a record of student
behaviors and time spent using various Betty features.
Students in the TA group chose to spend more of their time on learning
activities. About 50% of their time in the system was spent taking quizzes, asking
questions, editing the map, and reading. In contrast, the Self group spent most of their
time playing the game show and chatting; only 20% of their time was spent on
learning activities. Looking at reading times alone, the TA group spent significantly
more time reading (MTA = 13.4 mins, MSelf = 8.4 mins), which is particularly
impressive given the presence of other, more attractive options (e.g. games, quizzes)

26
in their environment. These results demonstrate that TA students persisted longer at
Betty’s learning activities which suggests that they were also more motivated to learn.
Moreover, on a paper-and-pencil post-test of factual, integration, and
application problems, the TA group significantly outperformed the Self group on the
“harder” questions – the integration and application problems. In Figure 2.3, the
groups are split into high and low achievers based on prior science grades,
demonstrating that the TA was particularly effective for low-achieving students. In
fact, on harder questions, the low achieving TA students performed at the same level
as the high achieving Self students.
Figure 2.3. Posttest scores broken out by item type, achievement level, and condition. The low-achieving TA students performed as well as the high-achieving Self students on inference and application questions. Figure adapted from Chase, Chin, Oppezzo, & Schwartz, 2009. In this study, learning on behalf of a TA inspired persistence at learning-
relevant activities and resulted in greater learning gains. The next study explored
possible motivational mechanisms behind this effect. We believed that part of these
effects were a function of watching feedback go to another versus oneself. We
wondered whether the agent could act as some sort of buffer for the negative
ramifications of failure. This would explain why low achievers, who experience
frequent failure and stand to gain more from an ego-protective buffer, showed greater
learning gains. So in this next study, we paid special attention to students’ reaction to
failure feedback while playing the game show.

27
Study 2: Does learning for the sake of another impact motivation in the face of failure?
Twenty-four 5th grade students were pulled from class for individual think-
aloud sessions, while they worked with Betty’s Brain (Chase, Chin, Oppezzo, &
Schwartz, 2009). This study contrasted the same two conditions and taught the same
science content. But this time, students provided think-alouds while they worked with
the software, which were analyzed for evidence of affect and attributions for failure.
Persistence times were collected and it was noted whether students chose to revise
their agent’s (or their own) knowledge following feedback.
The study took place in an hour-long session comprised of three phases: Study,
Play, and Revise. During the Study phase, students read a passage about fever
mechanisms then built concept maps to organize their knowledge on the topic. The
TA group was told that the purpose of building the map was to teach their agent, while
for the Self group, the object of the concept mapping activity was to learn (for
themselves).
After students built their maps they moved on to the Play phase where they
played one round of the game show alone. In the TA group, the agents answered the
host’s questions based on their maps, while in the Self group, the students themselves
answered the questions by selecting answers from a drop-down menu. Game show
questions ranged in difficulty, ensuring that each student would experience a
combination of success and failure.
Think-aloud protocols during game show play revealed that TA students were
much more likely to acknowledge failure than Self students. After getting a question
wrong in the game show, TA students made far more spontaneous statements of
negative affect (“I’m sorry Diokiki” or “Ungh!! Why does he keep answering large
increase!?!”). They also made more attributions of blame for the failure (“I didn’t
know this one” or “He got it wrong”) whereas the Self students rarely mentioned
failure. The TA students showed greater attention to failures by expressing negative
affect and making attributions.
An examination of how the TA students spontaneously apportioned blame for
failure revealed an even spread of attributions across the student and the TA. About

28
28% of attributions were made towards the TA (“He got it wrong”), 32% were
directed to the self (“I didn’t understand that question”), and 40% were ascribed to
some combination of both (“I, err… he didn’t know this one”). In contrast, Self
students, who did not have the luxury of an agent scapegoat to take the fall for them,
made 100% of attributions to themselves. For TA students, the agent created an outlet
for failure blame, yet the students themselves took some responsibility by making just
as many self-attributions.
Furthermore, TA students acted on this sense of responsibility by choosing to
revise their understanding. After receiving feedback in the game show, students had
the option of revising their understanding in preparation for a second, harder round of
the game. During revision, students were allowed to review the passage, view and edit
the concept map, or look over the game show feedback. A full 100% of TA students
chose to revise after the game show compared to only 64% of Self students.
In some sense, TA students’ drive for revision is not surprising, given that the
TA’s performance is dependent on the maps. But this aspect of teaching a TA is an
important part of moving beyond failure. For persistence to seem fruitful, there must
be clear actionable paths or possible approaches for improvement. For the TA
students, it is obvious how to increase the TA’s knowledge – fix the links in its brain.
For the Self students, it may not be so obvious how they can increase their own
knowledge, especially for young children who do not have well-developed SRL skills.
It is notable that 36% of Self students did not choose to revise at all; they did not even
see the value in glancing at the reading again. And of the Self students who did
choose to revise their knowledge, they spent a mere 1.5 minutes doing so, compared to
the TA students’ average of 8.6 minutes. Perhaps by having the means for repairing
the failure at their fingertips, TA students were willing to put in the effort to persist.
We posit that presenting students with the narrative of teaching an agent
provided them with an ego-protective buffer that motivated persistence after failure.
The agent occupies a unique social space of part self, part other. As a product of the
child’s tutelage, the agent is a reflection of the child’s knowledge. But by taking
independent actions (e.g. answering questions, taking quizzes, playing the game

29
show), the agent takes on a life of its own. In failure situations, this in-between-self-
and-other quality of the agent makes causal attributions ambiguous.
Since the TA was the one performing in the game show, not the students
themselves, the TA could absorb part of the blame for failure, sparing students’ sense
of competence. At the same time, students felt responsible for their agents’
performance, since it was enacting their teachings. This combination of internal and
external attributions may have spurred the students to continue work on the task.
Moreover, students have explicit control over their TA’s performance by
essentially programming its knowledge. Also, Betty’s Brain stresses the unstable and
changeable performance of the agent. After all, students literally edit their agent’s
“brain,” watching it change and grow. So in addition to the ego-protective buffer, the
conditions of controllability and instability – two dimensions of causal attributions
that provoke persistence – are incorporated into the teaching narrative of Betty’s
Brain.
Perhaps a confluence of these three elements – an ego-protective buffer, clear
control over outcomes, and an expectancy that performance will change – ultimately
led the TA students to acknowledge failures and attend to those failures by persisting
at the task. Since all three of these elements were simultaneously provided by the
agent, this study does not isolate the effect of the ego-protective buffer on persistence.
The dissertation study (described in Chapter 3) manipulates the presence of the ego-
protective buffer only, while holding other variables constant.
Study 3: Fail-abandon – A Poor Self-Regulated Learning Behavior
Study 3 was designed to achieve two broad goals that relate to the proposed
study: (1) to measure and explore self-regulated learning behavior and (2) to
empirically derive the types of self-regulated behaviors that lead to learning. To allow
for complete self-regulation of learning, we designed a new learning environment that
provided students with a tremendous number of learning choices. Students could
choose both the topic they wanted to work on and the resources that would help them
learn. They could also choose when to continue learning about a topic and when to

30
move on to another topic. Students were pulled from class in groups of 6 to play the
game independently for one 35-minute session.
The environment we designed was an educational game about genetics. The
game contained 5 different cumulative levels. Each level was designed to address a
different, but related genetics topic, including Punnett squares, probability, family
trees, co-dominance, and the inheritance of multiple genes. Levels were cumulative
and became increasingly more difficult, such that Level 5 was the hardest and tested
information from levels 1-4. Each level of the game contained several rounds of equal
difficulty, which allowed students to play the same level several times.
Each round of a game contained several genetics questions. When students
completed a round, the experimenter checked their answers and returned the marked
round back to students so they could see which answers were right and wrong.
Students were awarded points for rounds that earned a score of 75% or more questions
correct. When students got fewer than 75% of the questions correct in a round, they
lost a “life”. Points and lives were included to give the task a more game-like feel and
to motivate students to make choices carefully. For the purpose of our analysis,
winning points was treated as a “success” while losing a life was treated as a “failure.”
Throughout the game, students were free to make many choices. For instance,
they could select which level they wanted to play or whether they wanted to inspect a
help resource. Help resources included level-specific readings, solutions from rounds
played, and a glossary of vocabulary terms. Another choice included a distractor task
in which students could draw their own alien.
Each “choice” was represented by a different sheet of paper. Each student had
her own set of folders containing rounds for each level of the game, readings for each
game level, solutions to game rounds played, a glossary of terms, and the alien-
drawing task (see Figure 2.4). Every time a student wanted to make a different
“choice,” she would pick a new sheet of paper, and when she was finished with that
choice, she would place the sheet of paper face down in a “discard” pile. At the end of
the session, we collected these piles of paper, which represented our “clickstream”
data of the sequence of choices that were made.

31
Figure 2.4. Set-up of learning choices for the Scaffolded condition. Each folder contained sheets of readings, solutions, and game rounds specific to each level of the game. “Help” resources are outlined in bold. In the Unscaffolded condition, the “levels” were not labeled.
A side question, which proved to be less interesting in the end, was whether
provision of scaffolding would affect students’ choices within the environment and
resulting learning outcomes. Students in the Scaffolded group were told about the
cumulative leveling of the game. For them, the various levels of the game were
labeled with the level number (e.g. Level 1, Level 2, etc.). The Unscaffolded
condition was not told about the game’s built-in levels. Their folders were labeled
only with the game topic (e.g. Punnett squares, etc.). The game instructions sheet
explained that some topics were more difficult than others, but it gave no indication of
which ones were harder or easier. A Control condition did not play the game but
received regular instruction (on an unrelated topic) from their classroom teacher. All
three conditions took pre and posttests on the genetics content taught in the game. We

32
hypothesized that the Scaffolded group would learn the most from playing the game
because they would play the prescribed levels in order, and a more sequenced
presentation of the information should help students build a better conceptual
understanding of the material.
Both Scaffolded and Unscaffolded groups learned from playing the game, as
evidenced by their superior test performance in comparison to the non-treatment
control group. However, there were no learning differences between Scaffolded and
Unscaffolded conditions. We also did not find any drastic differences in students’
self-regulated learning behaviors across the conditions. The only major difference
between groups was in their leveling behavior. As predicted, the Scaffolded group
tended to “level up” by starting at level 1 and moving their way up to level 5
sequentially, one level at a time. In contrast, the Unscaffolded group, which was
unaware of the leveling scheme, jumped randomly from level to level, not following
any particular pattern. This difference in choice patterns was expected, given the
design of the learning environment, however, we did not find significant differences in
any other choices, such as the number of games played, the number of help resources
accessed, or the number of game failures.
However, we did find differences between conditions in how their use of help
features related to learning outcomes. In the Scaffolded condition, use of the help
features was unrelated to performance on the posttest. But in the Unscaffolded
condition, several measures of help usage were correlated with learning outcomes (see
Figure 5). For instance, the number of “relevant helps” (accessing either a reading or
a solution on the same level as a recent game) was moderately correlated with posttest
scores (r = .52), even when pretest and number of in-game failures were partialled
out. When the relevant helps category was further subdivided into time-ordered
transitions of “help-game” and “game-help” counts, only the game-help frequency was
correlated with learning (r = .42). Finally, we broke the game-help category into helps
accessed after failure (fail-help) and after success (success-help). Only the number of
fail-helps was significantly correlated with posttest scores (r = .47). This suggests
that help-seeking after failure is particularly important for learning.

33
Table 2.1. Partial correlations with posttest for the Unscaffolded condition, removing variance due to pretest and number of fails. No. of Relevant Helps .52** No. of Relevant Help-Game transitions .22 No. of Relevant Game-Help transitions .42* No. of Relevant Success-Help transitions .18 No. of Relevant Fail-Help transitions .47* No. of Success-abandon transitions .02 No. of Fail-abandon transitions -.45*
* p < .05, ** p < .01
Moreover, when we examined what Unscaffolded students did after failure
when they were not accessing a relevant help resource, we found that 91% of the time,
they abandoned the failed level and jumped to a new level entirely. This fail-abandon
behavior was negatively correlated with post-test scores (r = -.45). Furthermore,
when the variables listed in the Table 2.1 (along with pre-test scores and total number
of failures) were placed in a stepwise regression, the only variable that entered the
equation was the number of fail-abandons (ß = -.14, p < .001). This variable alone
explains 56% of the variance in post-test scores. Interestingly, of the 21 students in
the Unscaffolded condition who experienced failure, about half of them (10 students)
engaged in at least one fail-abandon behavior, and these 10 fail-abandon students
learned considerably less than the 11 fail-persist students (t (19) = 2.50, p = .03).
We became interested in the utter lack of persistence that some learners in the
Unscaffolded condition displayed in response to failure while others engaged in
productive persistence by adopting healthy SRL behaviors like help-seeking. One
hypothesis is that learners who abandoned a game after failure were engaging in self-
protective behavior. Perhaps they attributed failure to low aptitude and therefore, had
no hope of ever succeeding in the game, and so avoided future failure by abandoning
the level altogether. This type of ego-protective response might be blocked by
provision of an ego-protective buffer. The next study asks whether provision of an
ego-protective buffer embedded in the game could reduce this fail-abandon behavior,
encourage healthier SRL behaviors, and improve learning outcomes. The next study
also engaged students in longer periods of game play in hopes of uncovering longer
sequences of behaviors which could map onto larger-scale SRL patterns.

34
CHAPTER 3: METHODS
Study Overview
The current study was designed to follow up on two findings from prior
research. The first finding was that giving students the goal of teaching an agent
increased their learning, persistence, and attention to failure, relative to students who
were learning for themselves. One explanation for this effect is that the agent
provided an ego-protective buffer, which enabled students to persist in the face of
failure. However, in these prior studies, provision of an ego-protective buffer was
confounded with many other differences across conditions. The current study is meant
to isolate the effect of the ego-protective buffer on persistence and learning.
Moreover, it tests the generalizeability of this effect by instantiating the ego-protective
in a different context and a novel implementation. We hypothesized that the ego-
protective buffer would increase persistence after failure by reducing the fail-abandon
behavior exhibited in prior work.
The second finding, from the prior SRL study, was that persistence after failure
was a strong predictor of learning outcomes. The prior study was implemented with
paper-based choices and close oversight by the experimenter. In the dissertation
study, the same genetics game was implemented on the computer and played in a more
ecologically valid classroom setting. These two differences could have a large impact
on students’ learning choices, but still, we expected the fail-abandon behavior to be
robust. We also sought to gather a larger corpus of students’ self-regulated learning
choices, to allow fuller exploration of productive persistence.
To summarize, the dissertation study was designed to answer the following
research questions:
1. Does an ego-protective buffer promote persistence after failure?
2. Does persistence after failure influence learning? (Is the fail-abandon behavior
negatively correlated with learning?)

35
3. What constitutes productive persistence after failure? (What kinds of self-
regulated learning behaviors facilitate learning from failure?)
4. Does an ego-protective buffer promote productive persistence?
To test these questions, the current study engaged students in self-regulated learning as
they played a choice-filled, educational computer game. Students played a modified
version of the Unscaffolded game from the prior SRL study. As before, students had
access to multiple rounds of games on different topics in addition to multiple learning
resources. There were two conditions. In the Ego-Protective Buffer (EPB) condition,
students were told success and failure in the game was a probabilistic outcome. The
more questions they got right in a game round, the more likely they were to win, but
there was still an element of chance involved. We hoped this would invite students to
make a combination of internal and external attributions for failure. In the Control
condition, students were told that success and failure in the game was a deterministic
outcome. To win a game round they needed to get 75% percent of answers correct.
We hoped this would incite largely internal attributions for failure. In reality, wins in
both conditions required students to get 75% correct, we only manipulated the EPB
students’ perceived causes of success and failure.
Students in both conditions played the game for two class periods. Internal
and external attributions were measured by interviewing a subset of the students in the
study while they worked with the genetics game. Student “click” data provided a
measure of SRL behaviors including fail-abandon. Pre- and posttests assessed
learning gains due to the treatment. We also collected surveys that measure self-
regulated learning skills and motivational constructs to determine the relationship
between these self-reported individual differences, behaviors in the game, and
learning.
Design of Learning Environment
To address the research questions, we designed a learning environment that
enables students to regulate their own learning, experience frequent success and
failure, and learn complex genetics content. The final product was a genetics game

36
called Mendel’s Galaxy, which was based on the paper prototype game used in the
prior SRL study. To encourage self-regulated learning and to give students a sense of
control over learning outcomes, we provided students with many learning choices. In
addition to choosing learning resources, students selected both the topic(s) they
wanted to learn and the sequence of these topics. To investigate persistence in the
face of failure, we created topics of varying difficulty, to ensure a mixture of success
and failure in the game. We also produced multiple game rounds per topic, to give
students the option of trying again after losing. This was also meant to stress the
malleable nature of student performance in the game, and to create an expectation of
continued improvement. Also, because we were interested in the fail-abandon
behavior that appeared in the pilot study’s Unscaffolded condition, we chose not to
label the implicit “levels” of the game, replicating the Unscaffolded condition.
Instead, we allowed students to explore the topics on their own, hoping they would be
able to discover the levels for themselves.
Mendel’s Galaxy is built around an alien genetics narrative. Players take on
the role of geneticists-for-hire who travel the galaxy, hopping from planet to planet,
helping aliens unlock the secrets of their heritage by solving a series of genetics
puzzles (i.e. leveled games). Figure 3.1 shows a screenshot of the game homepage
and its seven planets, each of which covers a different genetics topic.

37
Figure 3.1. Homepage of Mendel’s Galaxy – an alien genetics game for middle schoolers. Each planet addresses a different topic and contains resources to help students learn the topic. There are a total of 4 isomorphic puzzles for each topic, which are similar to rounds of a game. The on-screen placement of planets was randomized for each player, to ensure that any pattern in the sequence of “levels” attempted was not driven by a planet’s location.
Mendel’s Galaxy was designed to teach students about the mechanics of
dominant and co-dominant inheritance. The game covers seven different topics
including: Punnett squares, probability, prediction, family trees, co-dominance,
Punnett squares with two genes, and family trees with 2 genes. Students can
investigate each topic by traveling to a planet. We developed a different puzzle for
each topic to give students practice in applying various genetics concepts. The topics
are leveled, such that information from previous topics is necessary to solve the
puzzles of a later topic, making some topics’ puzzles much harder than others. To
mimic the Unscaffolded condition from the pilot study, students were not told about
these implicit “levels.”

38
Each planet (topic) contains 4 isomorphic puzzles or game rounds, to provide
students with multiple chances to master a topic. Each puzzle contains a set of
questions or “challenges.” The number of questions on a puzzle ranges from 4 to 10,
depending on the topic. Figure 3.2 contains an example puzzle on the topic of family
trees. In this puzzle, students must enter the phenotypes and genotypes for the missing
individuals in the family tree. More example puzzles are available in the Appendix.
The game contains a hierarchy of choices, with some choices nested within
others (see Figure 3.3). On the first choice tier, students choose which of the 7 topics
(or planets) they want to work on. Next, students go to the second choice tier, where
they can select from a set of four resources to help them learn about that topic. They
can “preview” a practice puzzle for a given topic to determine whether they want to
Figure 3.2. Example puzzle from Planet Scila on the topic of family trees.

39
play. They can “read” a textbook-style passage about the topic. They can “play” or
attempt a puzzle (though once all 4 puzzles on a planet are played, students cannot
play any more puzzles on that topic). Or, they can see the correct “answers” to
puzzles already played.
Figure 3.3. Hierarchy of game choices. On Tier 1, students choose a topic. On Tier 2, students choose a resource. Some resources “unlock” access to additional resources on a Tier 3. After each selection, students can return to the homepage to begin the cycle again.
A third tier of choices is unlocked when students select the “play” or
“answers” resources. After students play a puzzle, they are presented with
success/failure feedback and are given the option of viewing the “feedback” resource
that details which problems they got right and wrong. If students choose to view the
correct “answers” to the puzzle, they receive the additional choice of reading
“explanations” for those correct answers. After selecting a resource, students are
typically sent back to the homepage to begin the choice cycle again. Examples of each
of these learning resources are shown in the Appendix. We chose this particular set of

40
resources, because we believed they would support learning of the complex genetics
content and provide a comprehensive data set on self-regulated learning in open-ended
learning environments.
The game allows for frequent experiences of success and failure. For each
puzzle the players win, they are awarded 10 points or “zorks”. Each time players lose
a puzzle, 1 of their “crew” is taken away. The total number of crew and points are
tracked in the score box, located in the upper right hand corner of every screen (see
Figure 1). Once all the crew are gone, the game is over. When the game ends,
students can restart the game. Their point total will return to zero and their crew will
be replenished, but they cannot attempt puzzles they tried in previous rounds of the
game.
The game presented in the current study differed in a few ways from the
prototype game in the SRL study. First, the number of topics was increased from 5 to
7 because we noticed that students had difficulty making certain conceptual “jumps”
between some topics, so we added extra topics to act as conceptual bridges. Second,
we added some additional resources to assess more complex patterns of self-regulated
learning. For instance, we wanted to include some “deep” (answer explanations) and
“shallow” (correct answers only) strategies. Moreover, we wanted to give students the
option to diagnose their errors by viewing the right/wrong feedback. Finally, we
removed a couple of choices that were rarely used in the prior SRL study, such as the
design-an-alien task and the glossary.
Participants
Study participants were 153 seventh-grade students from an extremely
ethnically diverse public school in California (35% Asian, 25% Latino, 22% Filipino,
11% White, 4% African-American and 3% other; 37% qualify for free lunch
programs). Of the 153 study participants, 143 of them completed both days of the
intervention, and of those we received permissions and pre- and posttest data for 130.
Participants were drawn from five different classes taught by the same science teacher.
Participants were assigned to condition through random stratified sampling within

41
class, based on science class grades and gender. It is important to note that students
had some prior knowledge in the domain; they had recently learned the basic
mechanics of dominant inheritance.
Study Design
Manipulation
The study contrasted two conditions: an ego-protective buffer (EPB) condition
and a Control condition. The main difference between conditions was the cover story
explaining how puzzles were won and lost. Even though the computer calculated wins
and losses in exactly the same way, we manipulated students’ perception of how
success and failure occurred.
In the EPB condition, students were told that the outcome of a puzzle was
probabilistic; winning a game was a function of both chance and the player’s
performance. The more questions students answered correctly in a game, the better
their chances of winning. Figure 3.4 shows the page displayed to students after
completing a puzzle. It shows the number of correct answers and the total number of
questions (challenges). To determine the outcome of the puzzle, an alien host throws
green and red balls into a bag. The number of green balls is equal to the number of
correct answers, and the number of red balls is equal to the number of incorrect
answers. The alien host then shakes the bag and randomly picks one ball. If he selects
a red ball, the player loses. If he selects a green ball, the player wins the puzzle. We
hoped this scheme would encourage students to blame failure on a combination of
external (bad luck) and internal sources (their own performance). Moreover, it gives
students an incentive to learn. If they were to get more questions right on the quiz,
their chances of winning would improve.

42
EPB condition Control condition
Figure 3.4. Failure message screens for EPB and Control conditions. The EPB condition believed that the outcome of the game was probabilistic. The Control condition believed the outcome was deterministic.
In the Control condition, students were told that the outcome of a puzzle was
deterministic, based solely on their personal performance in the game. Winning is
determined by a simple 75% rule. If more than 75% of the questions in a puzzle are
answered correctly, the players win. If 75% or less of the questions are answered
correctly, they lose. Since winning and losing in this scenario are entirely dependent
on the player’s performance, we expected students in this condition to make
predominantly internal attributions.
In reality, the computer followed the 75% rule to determine wins for both
groups. However, students were led to believe the cover story in their respective
conditions. Cover stories were explained to students via Powerpoint presentation on
the first day of game play, were reiterated on the second day of the game play, and
were further reinforced by the alien host’s actions in the game.
Another difference between conditions was the circumstances of the alien
host’s dance. In the EPB condition, the alien does a victory dance after a win. In the
Control condition, the alien host throws an equal number of red and green balls into a
bag and randomly chooses one. If he picks a green ball, he will do the dance. This
extraneous detail was included so that both conditions would have an element of
randomness, which often adds to the “fun factor” of games.

43
Condition Assignment
The study was implemented in 5 different science classes. Classes were split
in half based on the random stratified sampling procedure. Half of each class played
the game Tuesday-Wednesday, while the other half played Thursday-Friday. Each
half-class was assigned to a condition as shown in Table 3.1. Conditions alternated by
period to ensure an equal amount of variation in time of day and day of week. Half-
class groups ranged in size from 12 to 17 students.
Table 3.1. Condition assignment by period and day.
Period Tues-Wed Thurs-Fri 1 EPB Control 2 Control EPB 3 EPB Control 4 Control EPB 5 EPB Control
Procedure
Classroom Study
The study took place over the course of one full week of school, in students’
regular classroom. On Monday, all students completed the pretest and presurveys.
Next, students played the game for two 35-minute sessions, spread out over two
consecutive days. Some students played the game Tues-Wed while others played the
game Thurs-Fri. On the days when students were not playing the game, they received
regular instruction on unrelated content, from their classroom teacher. On the
following Monday, all students took the posttest and postsurvey.
On the first day of game play, the experimenter explained the game narrative
and game instructions to the entire treatment group with a Powerpoint presentation.
Each condition received a different explanation of how to win a puzzle. Afterwards,
students logged into the game on individual laptops and played for approximately 35
minutes. To ensure that their self-regulated learning choices were made
independently, students were discouraged from talking to one another.

44
On the second day of game play, the experimenter reiterated the game
instructions and further explained how to win a puzzle. Again, these explanations
differed depending on condition. In the EPB condition, it was explained to students,
through the use of a few examples, that the likelihood of picking a green ball would
increase as the proportion of correct answers rose. In the Control condition, the 75%
rule was reiterated and then demonstrated on the same set of examples.
After the brief explanation, students logged into the game and again played for
about 30 minutes. This time, students started the game afresh. Their scores were reset
to zero, crew were replenished, and all puzzles (including ones the students had
completed the day before) were available for play. This provided a measure of the
topics students would choose on the second day of game play. Would students
attempt puzzles they had failed the day before or would they merely try to repeat their
successes?
Pull-out Study
Two students were pulled from each classroom session to participate in video-
taped interviews as they played the game. These students were pulled after instructions
were given to the whole class, so they heard the same instructions as the students in
the larger classroom study. A total of 20 students, 10 per condition, were interviewed
as they played the game.
Experimenters trained in the interview protocol conducted the one-on-one
sessions. While students played the game, the experimenters occasionally interrupted
with questions that focused on attributions and learning choices. Questions were
asked whenever a student made a new choice, and whenever she experienced success
or failure. Table 3.2 describes the interview protocol.
Table 3.2 Interview Questions Condition Question
Success: puzzle won “Why was that a win?” Failure: puzzle lost “Why was that not a win?” Topic choice “Why did you choose this planet?” Resource choice “Why did you come to this page?”

45
Measures (see Appendix for complete measures)
Pretest
The pretest contained seven items. Each item was designed to address the
content from different planet. The items were very similar to the game puzzles but
used different surface features (i.e. different genetic traits and species) and were
presented in word problem form (rather than the graphic presentation used in the
game). Each item contained several questions using a fill-in-the-blank format. Most
questions asked students to derive the correct genotype or phenotype of a potential
child, given the genotype/phenotype of its parents. Other questions asked students to
calculate the probability that two parents would have a child of a particular genotype.
The first row of figure 7 contains a sample test item.
Each of the seven items contained several sub-questions. Each question was
given a score of 1 for a correct answer and a score of 0 for an incorrect answer.
Because each item contained varying numbers of sub-questions (ranging from 2-8),
scores for each item were converted to proportions (on a scale of 0-1) so that each
item would be weighted equally when aggregated with other items on the test.
Posttest
The posttest contained 7 questions that were identical to the pretest questions
except they differed on the surface features of species and genetic traits. Pre- and
posttests were coded by three separate coders who compared students’ answers to an
answer key. Given the low-inference coding scheme (i.e. answers were either right or
wrong), reliability between coders was not necessary.
Transfer Test
The transfer test contained 4 items, targeting two big ideas that ran throughout
the game: models of inheritance and probability. The 4 transfer items were further
subdivided into near and far transfer items. The 2 near transfer items were word
problems that asked students to apply what they had learned in new ways, but still
within the domain of genetics. The 2 far transfer items also asked students to apply

46
their understandings in new ways, but outside the domain of genetics. Items required
a combination of fill-in-the-blank answers (similar to those on the pretest) and short
answers. See example item types in Figure 3.5.
Once again, items were scored on various scales, ranging from 0-2 to 0-8,
depending on the number of genotypes or probabilities that needed to be calculated for
each item. For the sake of analysis, scores for each question were converted to a 0-1
scale. 25% of the items were scored independently by two coders, and reliability was
very high (92%). Given the high reliability, the remaining 75% of the data were coded
by a single coder.

47
Item Type
Sample Item
Posttest (nearly
identical to
pretest)
Near Transfer
Far Transfer
Figure 3.5. Sample post-test items

48
Pre-survey
The pre-survey assessed several different constructs. A portion of the survey
assessed two constructs of self-regulated learning strategies: cognitive strategy use and
self-regulation. There were 8 items for each construct selected from the Motivated
Strategies for Learning Questionnaire (Pintrich and De Groot, 1990; Pintrich, Smith,
Garcia, & Mckeachie, 1993).
The survey also assessed several other motivational constructs including
mastery, performance-approach, and performance-avoid goals, self-efficacy, interest,
and fixed intelligence. There were 4 survey items per construct, with the exception of
the fixed intelligence scale, which contained 3 items. Items were taken from the
Patterns of Adaptive Learning Scales (Midgley et al., 2000), Dweck (2000), and Lau
& Roeser (2002). All items were adapted to apply to science class work (e.g. in the
following item “an important reason I do my school work is because I like to learn
new things” I substituted “science work” for “school work”). See the Appendix for
complete surveys.
Post-survey
The post-survey included two open-ended questions that were designed to
assess students’ attributions for winning and losing in the game. However, this
measure was unsuccessful, as students tended to respond with the rules for winning
and losing in the game. In the end, this question served as a manipulation check,
demonstrating that 87% of EPB students and 95% of Control students correctly
understood how winning worked in the game, in their respective conditions.1 There
were also 6 Likert-scale items created for this study to assess students’ attitudes and
motivations towards the game. Questions focused on intrinsic motivation, self-
efficacy, and judgment of learning.
1 Two primary coders coded 25% of the manipulation check data and achieved 90% agreement. Due to this high level of reliability, a single coder coded the remaining 75% of the manipulation check responses.

49
Interview
The interview data will not be part of the analysis in this dissertation. This will
be reserved for future analyses.
Log Data
A database logged many of students’ discrete choices in the game, creating a
sequential record of students’ actions. It tracked the topics students attempted, and all
learning resources used. It also logged the amount of time students spent on each of
these resources.
Several two-event sequences were coded in the log data to explore the
relationship between failure, success, and persistence. Our measures of persistence
included “fail-abandon” and “success-abandon”. A “fail-abandon” behavior occurred
when a student failed a game and then immediately moved to a different planet (topic).
When students did not fail-abandon, they stayed on the same game level after failure.
“Success-abandon” was coded similarly to “fail-abandon,” but it occurred after a
successful game.
Measures of productive persistence explored what students did when they
persisted on a level. A “fail-play-again” behavior occurred when a student failed a
game and then immediately played another game on the same level. A “fail-resource”
behavior occurred when a student failed a game and then immediately checked a
resource on the same level. “Success-play-again” and “success-resource” were coded
the same way, except they occurred after successful games.
In all of these measures, viewing “feedback” was counted as part of the game
play process. For example, sequences of fail-play-again and fail-feedback-play-again
were both coded as “fail-play-again” behaviors. This was done because students
checked the “feedback” fairly frequently after failure (about 50% of the time) and also
because it was a qualitatively “easy” choice to make. To check any of the other
resources after playing a game, students would have to return to the homepage before
clicking on the desired resource. The feedback option was offered to every student
immediately after they played a game, and it was displayed as a special button at the

50
bottom of the win/lose page. In other words, since “feedback” only required 1 click,
while every other resource required 2-4 clicks, this was a more inviting resource that,
we decided, did not require the same amount of effort that went into checking the
other resources. Therefore, “feedback” was not treated as a diagnostic choice.

51
CHAPTER 4: EFFECTS OF TREATMENT ON LEARNING AND
PERSISTENCE: A FOUR-PRONGED ANALYSIS
Overview of findings
This chapter explores the main hypotheses of the study. We originally
predicted that students in the EPB condition would learn more than those in the
Control condition. This hypothesis was not supported. However, we did find that
high-failing students in the Control group learned less than their low-failing
counterparts, while high-failing EPB students learned just as much as their low-failing
EPB counterparts. In search of a mechanism for these learning effects, we explored
differences in persistence after failure across low- and high-failing groups in each
condition. While not statistically significant, the high-failing Control students were
relatively more likely to abandon a game after failure and persist on a game after
success. Finally, abandonment after failure was a negative predictor of learning -- the
less students persisted after failure, the less they learned. To hone in on the specific
locale of these effects, we investigated these same questions as a within-subjects
analysis, where we compared students in high and low failure situations (rather than
high and low failing students). The findings were similar, though the learning
differences between high and low failure situations were not as sizeable. Finally, we
explored these same hypotheses in the context of high and low challenge situations,
when students encountered games for which they had low and high prior knowledge.
This analysis showed that the effects of the ego-protective buffer on learning were
really a response to failure vs. success rather than a response to high vs. low challenge.
Overall, it seems that the ego-protective buffer is most effective under conditions of
high failure, particularly for high-failing students. See Table 5 on page 69 for a
summary of the main findings.

52
Analysis logic
The main analyses in this chapter were driven by three central research
questions, which relate to the original hypotheses:
Question 1: Does provision of an ego-protective buffer affect learning from the
game?
It was hypothesized that the EPB condition would have higher overall gain
scores than the Control group.
Question 2: Does provision of an ego-protective buffer affect persistence after
failure or success?
It was hypothesized that the ego-protective buffer would allow students to
persist after failure, which would lead to a lower rate of abandonment after
failure. However, we predicted that the ego-protective buffer would not
affect students’ response to success. To control for the rate of
abandonment, we compared persistence after failure to persistence after
success across conditions.
Question 3: Does persistence after failure or success affect learning from the
game, and does this effect differ by condition?
It was hypothesized that persistence after failure would increase learning
gains, on the assumption that abandonment after failure indicates a lost
opportunity to learn. If persistence after failure has an impact on learning,
then students who do not persist after failure should learn less from the
game, regardless of condition.
To investigate the above questions, four different types of analyses were
carried out. Each analysis examines the effect of the ego-protective buffer on learning
behaviors and outcomes from slightly different angles.
Analysis 4.1: Treatment effects
The first analysis examines treatment effects using the student as the unit of
analysis. Students’ choices and behaviors across the full game were related to

53
their overall learning gains. These effects were explored across Control and
EPB conditions.
Analysis 4.2: Treatment effects for high and low failers
This second analysis, also on the subject level, examines whether the effects of
the ego-protective buffer differ based on individual characteristics of the
student. This analysis asks whether students who experience a high rate of
failure in the game differ from students who experience a low rate of failure in
the game and whether this difference interacts with condition. Given that the
ego-protective buffer was designed to protect students from the negative
motivational consequences of failure, the EPB may only affect those students
who experience a high rate of failure.
Analysis 4.3: Treatment effects for high and low failure situations
The third analysis examines the effect of failure as a within-subjects variable.
The unit of analysis here is the situation rather than the student. In Analysis 2,
we asked whether the treatment would affect high and low-failing students
differently. In this analysis, we ask whether the treatment would have
differential effects on students’ responses to high and low failure situations.
For example, do students show greater rates of abandonment for games where
they fail often compared to those where they do not? Another interesting
difference between this analysis and the prior analyses is that it makes a tighter
connection between actions taken on specific levels of the game and learning
outcomes on those levels (because it is possible to match items on the posttest
to each game individually).
Analysis 4.4: Treatment effects for high and low prior knowledge situations
A final analysis examines the question of persistence from a different angle.
Rather than investigate the effects of failure on persistence, this analysis
examines the effect of high challenge (as a situation-level variable) on
persistence. When students know little about the topic covered in a game, they
may be less likely to persist after failure because the game is too challenging
for them. In this analysis, high challenge situations were defined as games for

54
which students had low prior knowledge. Provision of an ego-protective
buffer may moderate the effect of challenge on in-game behavior by providing
students, prospectively, with a lower risk of the negative ramifications of
failure.
There are advantages to testing the research questions with several different
analyses. First, it allows us to separate real effects from “fluke” effects that may
appear when the data are sliced one way but not another. Second, it allows us to
investigate these effects when either the situation or the person is the unit of analysis,
to gain more precision in understanding the conditions under which the effects take
place. Third, it allows us to investigate the effects at different degrees of specificity.
Some effects are investigated on the broad scope, examining how behaviors across the
entire game relate to overall learning, while others are investigated more precisely,
tying specific behaviors on levels of the game to learning gains on those levels.
Analysis 4.1: Treatment effects
This first analysis focuses on the effect of treatment on learning gains, in-game
choices, and the relationship between in-game choices and learning outcomes. Before
addressing each of these pieces of the analysis, we explore whether students learned
from the game, regardless of condition.
All analyses in the dissertation include students who were in the main
classroom and the pullout study. Their behaviors looked quite similar and there were
no mean differences in behaviors across pullout and classroom students. Note that the
number of students in each analysis presented below may change. 143 students
completed the full two days of instruction, but only 130 of them had pre- and post-test
data. Analyses that describe students’ in-game behaviors only used the full set of 143
subjects, though in some cases, students had missing data for a certain behavioral
outcomes, so the N may drop. In other analyses, the unit of analysis is at the level of
the observation rather than the student, so the degrees of freedom could become larger
than N.

55
Learning Scores from Pre- to Posttest
The first two rows of Table 4.1 display pre- and posttest scores for the full
sample and split by condition. Because some students never visited a level of the
game, their pre- and posttest scores on the unvisited levels were not included in their
average pre- and posttest scores. Because students were given the choice of what to
learn, it only seems sensible to test them on what they attempted to learn.
Furthermore, this should tighten the relationship between in-game behaviors and
learning outcomes. The number of levels visited was equal across EPB and Control
groups (MControl = 6.88, SDControl = 0.38; MEPB = 6.77, SDEPB = 0.55), so this alteration to
the learning scores did not bias the analysis in favor of either condition2.
Pretest scores were similar across conditions, demonstrating equivalent prior
knowledge across the groups, t(128) = .34, p = .74. To test whether students learned
from the game, students’ average question scores were compared from pretest to
posttest. On a paired sample t-test, pre- and post-test scores differed significantly,
t(127) = 10.40, p < .001, d = . 48. On average, students’ scores increased from pre- to
posttest by 10 percent, a moderate improvement.
Table 4.1. Average scores on pretest, posttest, learning gains, and transfer items. Throughout, parenthetical values are standard errors of the group means.
All Control EPB Pretest 0.52 (.02) 0.51 (.03) 0.53 (.03) Posttest 0.63 (.02) 0.62 (.03) 0.64 (.03)
Gain Score 0.16 (.02) 0.15 (.02) 0.17 (.02) Near Transfer 0.19 (.02) 0.19 (.03) 0.19 (.03) Far Transfer 0.33 (.03) 0.30 (.04) 0.36 (.04)
Learning Gain Scores
To measure learning from the game, a gain score was derived from pre- and
posttest scores. Rather than a simple difference score, which disadvantages high pre- 2 Even when we do not alter the learning scores in this way, the results comparing pretest, posttest, and learning gain scores across conditions are the same. However, removing the scores for unvisited levels does tighten the connection between actions taken in the game and learning outcomes (i.e. most correlations between in-game behaviors and learning outcomes become slightly more significant).

56
test scorers, the difference score was divided by the possible gain or possible loss.
This gives all participants equal “room” to gain or lose from pre- to posttest. To
normalize the distribution of gain scores, the square root of the denominator was
taken. In cases where the difference score was 0, the gain score also became 0. Table
4.2 shows the formula applied to compute gain scores.
Table 4.2. Calculation of learning gain scores. Post-Pre Gain Score Formula
> 0 (Post – Pre) / √(1 – Pre) < 0 (Post – Pre) / √ Pre 0 0
4.1.a Question 1: Does provision of an ego-protective buffer affect learning from the
game?
The key hypothesis was that the ego-protective buffer would facilitate learning.
To test this prediction, we compared EPB and Control conditions on average learning
gains from pre- to posttest. The effect of condition on learning gain was not
significant, t(126) = .89, p = .37 (see Table 1).
After taking the posttest, students completed an additional test containing near
and far transfer items that were not part of the pretest. Transfer items focused on two
main concepts that ran throughout the game: probability and models of inheritance.
Near transfer items required application of these concepts to novel situations within
the domain of genetics. Far transfer items required application of these concepts to
novel situations beyond the genetics domain.
To test the effect of condition on near and far transfer items, a repeated
measures ANOVA crossed the within-subjects factor of transfer type (near vs. far)
with condition on test scores. There was no effect of condition, F(1, 139) = .52, p =
.47 and no interaction, F(1, 139) = 1.21, p = .27. However, there was a significant
effect of transfer type, F(1, 139) = 32.31, p < .001, demonstrating that students scored
lower on the near transfer items. Given that the near transfer items were designed to
be easier than the far transfer questions, this result suggests that the transfer items

57
were not assessing the appropriate constructs. In light of this, the transfer measures
will not be used as outcome measures in the remainder of the analyses.
4.1.b Question 2: Does provision of an ego-protective buffer affect persistence after
failure or success?
Another main hypothesis was that the EPB manipulation would discourage the
behavior of abandoning after failing a level of the game. To test this prediction, the
rate at which students abandoned a level after success was compared to the rate of
abandonment after failure across high and low failing students in both conditions. The
rate of fail-abandon was computed by dividing the total number of abandonments3
after failure by the total number of failures in the game. Dividing by the number of
fails ensures that any effects are due to abandonment rather than failure per se. To
compute the success-abandon rate, the number of abandonments after success was
divided by the total number of successes. Rates of success-abandon and fail-abandon
created a simple within-subjects comparison that controls for the effect of overall rate
of abandonment regardless of failure.
The frequency and time spent on various behaviors across each day of game
play were highly correlated (all r’s > .46), indicating that students behaved similarly in
both game sessions. Given this, all in-game behaviors such as the rate of fail-abandon
and the rate of success-abandon were collapsed across both days of game play in all
analyses.
To test the effect of condition on abandonment after success and failure, a
repeated measures ANOVA crossed the between-subjects factor of condition on the
within-subjects factor of success-abandon vs. fail-abandon. There was a marginal
main effect of success- vs. fail-abandon, F(1,129) = 3.07, p = .08, indicating higher
rates of abandonment after failure. There was no effect of condition, F(1,129) = .11, p
3 An abandonment occurred when a student played a game and then immediately moved to another level of the game, abandoning the prior level. An abandonment was coded when students either (a) played a game and then changed levels or (b) played a game, viewed feedback on that game, and then changed levels. Feedback was treated as part of failure because it occurred quite frequently after failure (approximately 50% of the time) and because it was too tempting of a resource choice to be diagnostic.

58
= .74. However, there was a significant interaction of condition by success- vs. fail-
abandon, F(1,129) = 6.00, p = .02, d = .2. As shown in Figure 1, and confirmed by
Tukey’s post hoc tests, the EPB students were equally likely to abandon after a
success or failure, while the Control students were far more likely to abandon after
failure than after success, p < .05. By this analysis, the hypothesis that the Control
condition would fail-abandon more was partially confirmed. The Control students did
not fail-abandon at a significantly lower rate than the EPB group, but the Control
students’ rate of fail-abandon was lower than their own rate of success-abandon. So,
the ego-protective buffer of the EPB condition did not simply reduce the incidence of
fail-abandon. Rather, it equalized the likelihood of abandonment after success and
failure. Figure 4.1 shows this pattern of results.
Figure 4.1. Rates of fail-abandon and success-abandon by condition.
4.1.c. Questions 3: Does persistence after failure or success affect learning from the
game, and does this effect differ by condition?
To examine the effect of fail-abandon and success-abandon on learning, simple
correlations with the gain scores were computed for the full sample and for each

59
condition (see Table 4.3). There were no significant correlations between success-
abandon and learning. However, there was a significant negative correlation between
fail-abandon and learning in the full sample. When broken out by condition, both
Control and EPB groups showed small, negative, non-significant correlations between
fail-abandon and learning gains. These results indicate that the more students
abandoned after failure, the less they learned from the game, regardless of condition.
This is a rather weak effect, but nonetheless it shows that students’ response to failure
had an impact on learning.
Table 4.3. Correlations between learning gains and rates of success- and fail-abandon, overall and split by condition. All Control EPB Success-abandon -.05 -.06 -.08 Fail-abandon -.18* -.14 -.23
* significant at p < .05
Analysis 4.1 Summary
Analysis 1 demonstrated that students across both conditions learned complex
genetics material by playing the game. However, there were no effects of treatment
on learning gains. An examination of in-game persistence behaviors revealed that
students in the Control condition were more likely to abandon a game topic after
failure than after success, while EPB students were equally likely to abandon after
success and failure. One interpretation of this result is that the EPB is acting in two
ways. First, it eliminates the avoidant reaction to failure. Second, an ego-protective
buffer also affects the prospective treatment of failure, whereby it reduces the
tendency (displayed by the Control group) to “play it safe” and stay in one’s comfort
zone, rather than venture out and risk failure on a new challenge. Persistence in the
face of failure has consequences for learning. The more students abandon a topic after
failure, the less they learn, whether or not they have access to an ego-protective buffer.

60
Analysis 2: Treatment effects for high and low failers
The ego-protective buffer of the EPB condition was designed to support
students in persisting after failure, so one potential hypothesis is that the EPB will
have stronger effects on students who experience more failure. Reciprocally, the EPB
may not provide a learning benefit for students who rarely fail. To test this prediction,
students were binned into high- or low-failers based on failure rates (number of fails
divided by number of games played). Categorizing people into the dichotomous
categories of high and low failers provides a simple way to conceptualize the effect of
failure on learning in each condition.
Groups were split on the median to ensure equal sample size in the high and
low failing groups. Both the median and mean failure rates were nearly identical
across conditions (MedianControl = .50, MeanControl = .52, SDControl = .29; MedianEPB = .50,
MeanEPB = .48, SDEPB = .29). On average, students failed 50% of the games they
played4. Figure 4.2 shows that the distribution of failure rates is relatively normal
across conditions, so there is no danger that the median split obscures the effects of a
non-normal distribution.
4 Recall that failure occurs when a student scores at or below 75% on a single game.

61
Figure 4.2. Histograms of failure rates by condition (failures divided by number of games played).
4.2.a. Question 1: Does provision of an ego-protective buffer affect learning
differentially for high and low-failing students?
To test this question, a factorial ANOVA crossed the factors of condition by
high/low failers to predict learning gain. There was no main effect of condition F(1,
126) = .34, p = .56, but there was a significant main effect of high- versus low-failers
F(1, 126) = 17.75, p < .001, demonstrating a lower gain score for the high-failers.
Most importantly, there was a significant interaction effect F(1, 126) = 5.86, p = .02, d
= .2. As shown in Figure 4.3, students in the Control condition who had a high rate of
failure learned far less than their low-failing counterparts. However, in the EPB
condition, high- and low-failers made the same learning gains, demonstrating the kind
of buffer effect the EPB was designed to maintain. Post-hoc comparisons using
Tukey’s HSD indicated that the gain score of high- and low-failers in the Control
conditions differed significantly, p < .05, but this was not the case in the EPB group.

62
Figure 4.3. Learning gain scores by condition by high- versus low-failers.
Similarly, when removing the binning, the rate of failure had a stronger
relationship with learning gains in the Control condition (r = -.50, p < .001) than in the
EPB condition (r = -.28, p = .03). In the Control condition, each additional failure was
associated with a larger decrement in gain score than in the EPB condition (see Figure
4.4). Taken together, the results of the ANOVA and correlations indicate that failure
had a stronger effect on learning in the Control condition than in the EPB condition.
This fits the overall hypothesis that providing students with a psychological buffer
protects them from the negative ramifications of failure that can interfere with
learning. However, it suggests a modification to the original hypothesis. The
protection offered by an EPB is most important for students who experience high rates
of failure.

63
Control EPB
Figure 4.4. Scatterplots of failure rate by learning gain for each condition.
4.2.b. Question 2: Does provision of an ego-protective buffer affect persistence after
failure or success differently for high and low-failers?
Given the learning differences between high and low-failers by condition, the
next analysis examined whether the rate of fail-abandon and success-abandon differed
across high- and low-failers within each condition. To test this, a repeated measures
ANOVA crossed the between-subjects factors of condition and high/low failers on the
within-subject factor of success- vs. fail-abandon. Once again, the interaction of
success- vs. fail-abandon by condition was significant, F(1,127) = 5.99, p = .02,
replicating the earlier finding that Control students were more likely to fail-abandon
than success-abandon, and EPB students were equally likely to abandon after either
game outcome. There was also a significant effect of high/low failers on
abandonment, F(1,127) = 16.59, p < .001, demonstrating that high-failers were more
likely to abandon. There was a marginal effect of success vs. fail-abandon, F(1,127) =
2.87, p = .09, which indicates higher rates of abandonment after failure than success.
There was a marginal interaction of condition by high/low failers, F(1,127) = 2.88, p =
.09, which indicates a larger difference in abandonment rates between high and low

64
failers in the EPB condition than the Control condition. There were no other
significant effects, all F’s < 2.0. The lack of a significant three-way interaction shows
that abandonment behaviors were not drastically different across low and high-failers
by condition. However, Figure 4.5 shows that, descriptively, the Control group
exhibited lower rates of success-abandon than fail-abandon, while EPB students were
equally likely to success- and fail-abandon. Control students who were failing
frequently tended to abandon a level they had failed and stayed on a level they could
pass rather than risk failure on a new level.
Figure 4.5. Abandonment after success and failure by condition and high- versus low-failers.
4.2.c. Question 3: Does persistence after failure and success affect learning from the
game, and does this effect differ by condition and high- and low-failer students?
To examine whether condition affects learning differently for high and low-
failers, correlations between fail-abandon and success-abandon rates and learning
gains were computed and listed in Table 4.4. None of the correlations is significant
when partitioned to this level.

65
Table 4.4. Correlations between the rates of success- and fail-abandon and learning gain scores, broken out by condition and high- and low-failers. Control EPB
Low Failure High
Failure Low Failure High
Failure Success-abandon -.05 -.01 .003 -.14 Fail-abandon -.04 .03 -.15 -.22
Analysis 4.2: Summary
The analysis of failure-rate as a person-level characteristic demonstrated that
without an ego-protective buffer, the Control students who failed at a high rate learned
less from the game than low failers. In contrast, high-failure students in the EPB
condition did not show a learning decrement relative to low failers. We suspected that
this difference in learning gains could have been caused by students’ differential
responses to failure across the two conditions. Analysis 1 demonstrated that, overall,
EPB students were just as likely to abandon a level after success and after a failure,
while Control students abandoned after failure at a higher rate than they abandoned
after success. These differences were even more pronounced for the high failure
Control group, though not significantly so. However, at this level of partitioning, fail-
abandon did not correlate significantly with learning. Thus, the chain of effects is that
a lack of an ego-protective buffer influences high-failure students to abandon
relatively often. The missing link in the chain is the effect of fail-abandon on learning.
When analyzing the larger sample this link is present -- students who fail-abandoned
learned less – which completes the full chain of inference, though not at the same level
of analyis.
Analysis 3: Treatment effects for high and low failure situations
The prior analyses suggest that the ego-protective buffer has a greater impact
on high-failing students. This next section asks whether the ego-protective buffer
makes a stronger impact in high-failing situations, across all students. For this
analysis, persistence and learning were compared across levels of the game where

66
students experienced high and low rates of failure regardless of whether students were
high- or low-failers.
For each student, each level of the game was classified as a high or low failure
situation based on a cut-off of 50% failure. Given that 50% failure was the median
split used in the previous analysis to categorize students as high- or low-failers, the
same cut-off of 50% failure was set to classify each level as a high or low failure
situation. In other words, levels on which students lost more than 50% of the games
were considered high-failure situations. Classifications of levels into high and low
failure situations were done independently for each student. The average behaviors
and learning gains were computed for each students’ high- and low-failure situations.
This analysis allows us to examine behavior and learning when students fail more
often than they succeed and when they succeed more often than they fail.
This type of analysis occurs on a more narrow scope than the former analyses;
it ties level-specific behaviors to level-specific learning outcomes. In the earlier
analyses, overall in-game behaviors were related to the overall gain scores. In this
analysis, actions on a level will be related to posttest questions for that level.
Not every student had both high and low rates of failure. However, the
number of students with low failure situations and the number of students with high
failure situations were equal across conditions (NHighControl = 69, NHighEPB= 69; NLowControl =
57, NLowEPB = 54), so splitting the data by high and low failure situations did not favor
one condition over another. Mixed model regressions will be used to analyze these
data. Mixed models can account for multiple observations of subjects, in unbalanced
designs with missing data, such as this one.
4.3.a. Question 1: Does provision of an ego-protective buffer affect learning from the
game differently in high and low failure situations?
A mixed model regression tested the effect of condition by high/low failure
situations on learning. The factors of failure situation (high vs. low) and condition
were entered in a factorial design with average learning gain score on high and low
failure levels as the outcome measure. The model uncovered a significant main effect

67
of failure situation, F(1, 221) = 8.59, p = .004 with a beta estimate of .07 for low
failure situations. This suggests that students learned more from low-failing
situations; students’ gain score in low-failing situations is .07 units, almost half a
standard deviation higher than their learning gain from high-failing situations. The
effect of condition and the interaction between condition and failure rate were not
significant, F’s < 1.5. However, descriptively, the results are in the same direction as
in analysis 4.2.a. As shown in Figure 4.6, the difference in learning outcomes between
high and low failure situations is greater in the Control condition.
Figure 4.6. Learning gains by high/low failure situations by condition.
4.3.b. Question 2: Does provision of an ego-protective buffer affect persistence after
failure or success differently in high and low failure situations?
To assess the effect of high/low failure situations on abandonment after
success and failure, a repeated measures ANOVA was run, crossing the factors of
condition and high/low failure situations on success- vs. fail-abandon. There was a
significant main effect of failure situation, F(1, 189) = 13.95, p < .001, indicating
higher overall abandonment on high failure levels. There was also a significant
interaction between success- vs. fail-abandon and high/low failure situation, F(1, 189)

68
= 15.62, p < = .001, demonstrating that students were more likely to abandon after
failure than success when the failure rate was high but they did the opposite when the
failure rate was low. Just as in the first analysis, there was a significant interaction of
success- vs. fail-abandon by condition, F(1, 189) = 5.74, p = .02, showing that the
Control condition was far less likely to abandon after success than after failure, while
the EPB condition was equally likely to do either. Most importantly, there was a
significant three-way interaction between success- vs. fail-abandon, high/low failure
situation, and condition, F(1, 189) = 6.34, p = .01. The pattern is clearly depicted in
Figure 7. When Control students were in high-failure situations, the rate of success-
abandon was much lower than the rate of fail-abandon, whereas for EPB students in
high-failure situations, these rates were equivalent. Moreover, rates of fail-abandon in
high failure situations were higher in the Control group than the EPB group, while
rates of success-abandon in high failure situations were lower in the Control group
than the EPB group, as confirmed by Tukey’s test, p’s < .05.
So, when students were failing less than 50% of the time, they were more
willing to “stick with” a level when they failed but were quick to leave when they
passed, regardless of the condition they were in. But when they were failing more
than 50% of the time, condition mattered. Students in the EPB group, who were
experiencing high failure on a level, were just as likely to give up on a level after
success as after failure. However, Control students in the same situation were far
more likely to give up after failure and “stick with” a level they could pass. These
findings dovetail nicely with the results from the person-level failure analysis, which
showed the same pattern of results.

69
Figure 4.7. Rates of abandonment after success and failure split by condition and high/low failure situations.
4.3.c Question 3: Does persistence after failure affect learning from the game, and
does this effect differ by condition? Do these effects differ across high and low failure
situations?
To test the effect of abandonment after failure on learning in Control and EPB
groups during high and low failure situations, a linear mixed model was run. The
factors of failure situation (high vs. low), condition, fail-abandon rate, and their
interactions were entered into a model predicting learning gain scores. There was a
marginal interaction between failure situation and rate of fail-abandon, F(1, 202) =
3.72, p = .06, indicating that fail-abandon had a stronger effect on learning in high
failure situations. However, no other effects were significant, F’s < 2.22. This
analysis suggests that the rate of fail-abandon does affect learning in high failure
situations. A second mixed model was run with the same predictors but with success-
abandon rates as the outcome measure. There were no significant effects, F’s < 2.50,
suggesting that success-abandon rates do not explain learning gains.

70
Analysis 4.3 Summary
An analysis at the within-subjects level did not find a significant interaction
between high/low failure situations and condition on learning outcomes. However, the
pattern of results was descriptively similar, with the Control group showing a greater
loss of learning in high failure situations compared to the EPB group. This suggests
that rate of failure is an important pre-condition for the ego-protective buffer to protect
learning, but the effect of failure has a stronger impact at the subject level (as shown in
Analysis 2) than the situation level. This analysis did find that in high failure
situations, the Control group was more likely to fail-abandon than success-abandon,
while the EPB group was equally likely to do both. These results are quite similar to
those uncovered in Analysis 2. Finally, there was a near-significant effect where fail-
abandon was a better predictor of learning in high-failing situations. This suggests
that persistence after failure is particularly important with respect to learning, when
students are failing more than 50% of the time.
Analysis 4.4: Treatment effects for high and low prior knowledge situations
A final analysis examined the effect of the ego-protective buffer in challenging
situations. Perhaps the effects of the ego-protective buffer are not specific to failure
situations but can be generalized to any situation of great difficulty. We hypothesized
that the ego-protective buffer could encourage persistence in high challenge situations.
A ‘high challenge’ situation occurred when a child played a game for which he had a
low pretest score. Our assumption was that students would feel challenged when they
encountered a game topic they knew little about.
In this within-subjects analysis, each student’s set of game levels was
classified as a high or low prior knowledge level based on pre-test scores. Once again,
we chose a 50% criterion. Levels where students scored higher than 50% on the level-
specific pretest item were classified as high prior knowledge levels. Likewise, a score
of 50% or below on the pretest item classified a level as low prior knowledge. In

71
other words, high and low prior knowledge situations were defined as levels of the
game where a given student knew more or less than half of the material.
Not every student had both high and low prior knowledge levels. However,
the number of students with high and low prior knowledge levels was equal across
conditions (NHighControl = 57, NHighEPB= 60; NLowControl = 65, NLowEPB = 63). Mixed model
regressions will be used for this analysis, to account for missing data.
4.4.a. Question 1: Does provision of an ego-protective buffer affect learning
differently in high and low prior knowledge situations?
To test the effect of condition by prior knowledge within subjects on learning,
a mixed model regression was run. Prior knowledge (high or low) and condition and
their interaction were entered into the model to predict learning gain. Figure 4.8
shows the pattern of results. There was a large main effect of prior knowledge, F(1,
241) = 30.89, p < .001 with a beta estimate of .17 for low prior knowledge. There
were no other significant effects, F’s < 1. This suggests that the gain score is favoring
improvement on levels where students began with low prior knowledge. Moreover,
there is no interaction with condition. This finding suggests that the ego-protective
buffer acts on students’ response to failure rather than the general experience of
difficulty, such as encountering a game that is challenging.

72
Figure 4.8. Learning gain by condition and high/low prior knowledge situations.
4.4.b. Question 2: Does provision of an ego-protective buffer affect persistence after
failure or success differently for high and low prior knowledge situations?
To test the effect of treatment by prior knowledge on abandonment after
success and failure, a repeated measures ANOVA was run. Condition, success- vs.
fail-abandon, and prior knowledge (high vs. low) were entered into the model to
predict rates of abandonment. There was a main effect of prior knowledge, F(1, 178)
= 8.17, p = .005, d = .2, demonstrating higher overall rates of abandonment in the low
prior knowledge situations. There was a marginal effect of game outcome, F(1, 178)
= 2.70, p = .10, indicating slightly higher rates of abandonment after failure than after
success. There was also a condition by game outcome effect, F(1, 178) = 8.41, p =
.004, demonstrating that as before, the Control group was more likely to abandon after
failure than success, while the EPB group was equally likely to abandon after success
and failure. Finally, there was a small but significant interaction of game outcome by
prior knowledge, F(1, 178) = 3.84, p = .05, d = .14, revealing higher rates of
abandonment after failure as compared to success in the low prior knowledge group.
The high prior knowledge group was equally likely to engage in abandonment after

73
failure and success. The three-way interaction was not significant. Descriptively, the
pattern is the same as before. Figure 4.9 shows that students in the Control condition
experiencing high challenge, which in this case is the low prior knowledge group, the
discrepancy between the rates of fail-abandon and success-abandon is quite large in
comparison to the other three groups.
Figure 4.9. Rates of abandonment after success and failure split by condition and high/low prior knowledge situations.
4.4.c. Questions 3: Does persistence after failure affect learning from the game, and
does this effect differ by condition or situations of high and low prior knowledge?
The factors of condition, prior knowledge (high vs. low), and fail-abandon
rates were crossed in a mixed model regression to predict learning gain scores. There
was a main effect of prior knowledge, F(1, 220) = 10.64, p = .001, such that situations
of low prior knowledge resulted in greater learning gains, with a beta estimate of .11,
more than one third of a standard deviation. There was also a main effect of fail-
abandon rate, F(1, 219) = 6.97, p = .009, with a beta estimate of -.22, about three
quarters of a standard deviation, suggesting that in all groups, fail-abandon was a

74
significant predictor of learning. There were no other main effects or interactions, all
F’s < 2.6. As seen in Analysis 1, this model confirms that fail-abandon behaviors
impact the learning of all students.
To test the effects of success-abandon rates by condition and prior knowledge
on learning gains, an identical mixed model was run, except success-abandon rates
were entered into the model in lieu of fail-abandon rates. Only the main effect of prior
knowledge was significant, F(1, 183) = 18.72, p < .001, with a beta estimate on low
prior knowledge of .23, about three quarters of a standard deviation. All other main
effects and interactions were non-significant, F’s < 1.39. As before, success-abandon
is not explaining a significant amount of the variance in learning gain scores.
Analysis 4.4 Summary
In contrast to the interaction effects between failure rates within and across
subjects, a challenging situation, conceptualized as low prior knowledge, did not affect
learning gains differentially by condition. Consistent with prior analyses, there was a
descriptive (though non-significant) trend for the Control group in low prior
knowledge situations to abandon more frequently after failure than success. In
addition, fail-abandon rates did predict learning gains, and this did not interact with
condition or prior knowledge. This reiterates the findings from Analysis 1, where fail-
abandon has a negative effect on learning for all students.

75
Table 4.5. Summary of findings from four data analyses, addressing three research questions.
Discussion
Taken together, these four sets of analyses define the conditions under which
the ego-protective buffer does and does not affect persistence and learning. Moreover,
using each analysis as a different test of the main hypotheses helps to identify the
robust findings and weed out those that might simply appear by a lucky partitioning of
the data.
With respect to our three central research questions, some of them are more
clearly answered by these four sets of analyses. The first question asked whether
provision of an ego-protective buffer affects learning and under what conditions.
There were no general effects of treatment on learning, however, high-failing students
in the Control group learned less than their low-failing counterparts. Descriptively,
high-failing situations were also associated with lower learning gains in the Control
group, though this finding was not statistically significant. This suggests that the

76
effect of failure by treatment on learning is stronger on the person level than the
situation level. Low prior knowledge situations, on the other hand, did not interact at
all with condition to affect learning. This suggests that the effect of the EPB on
learning is moderated largely by failure rather than the general experience of
difficulty.
The second research question focused on the behavioral effects of the ego-
protective buffer under various conditions. Here, the effects were fairly consistent
across analyses, suggesting that this finding is robust. Students in the Control group
tended to abandon a level of the game at a higher rate after failure than after a success,
while students in the EPB group were just as likely to persist after failure and success.
This effect was magnified in high-failing individuals, high-failing situations, and low
prior knowledge situations, though this pattern was only significant in failure
situations. Overall, the ego-protective buffer encourages persistence under times of
difficulty, particularly when subjects experience a high rate of situational failure.
Finally, we asked whether behaviors of persistence after success and failure
impacted learning and how this effect might be moderated by conditions of failure and
challenge. On the whole, students who did not persist after failure (by failing and then
abandoning) learned less from playing the game, regardless of condition or failure
rates.
While none of these analyses tell a perfect story by themselves, taken together,
they tell a clear story (see Table 4.5 for summary of findings). Persistence after failure
is critical for learning; students who do not persist learn less from the game. An ego-
protective buffer enhances persistence after failure relative to success, particularly in
high failure situations. Perhaps because of this5, students with an ego-protective
buffer who experience high failure learn just as much as their low-failing counterparts,
while high-failing students who do not have access to an ego-protective buffer learn
far less than their low-failing counterparts. Interestingly, students in the Control
5 It should be noted that we have not found a clear relationship between the difference in persistence behaviors across conditions and learning outcomes. While persistence after failure is related to learning, the EPB and Control groups differ on persistence after failure only as it relates to persistence after success.

77
condition were also more likely to make safer choices after success, by choosing to
play games they knew they can win. These effects also occur, but to a lesser degree,
in situations of high failure.
Why are the effects significant in some analyses and not others? One
possibility is that condition by failure has a small effect on learning. So partitioning
the data in one way leads to significant results, while partitioning the data another way
creates consistent, but not quite significant results. Moreover, because the data are
sometimes at the person-level and sometimes at the level of the observation, different
statistical tests were run. Because some statistical tests were more powerful than
others, they might create discrepancies in statistical significance across analyses. A
third possibility is that the measure of learning is changing from one analysis to the
next. On the person-level analyses, learning gain is based on the average question
score across all test items. On the within-subjects analyses, learning gain is based the
average question score across all items on a certain type of level (e.g., high/low failure
situation). This slight change in measures may have affected the findings.
So far, we have examined the effects of treatment on persistence and
persistence on learning gains. We have shown that an EPB can enhance persistence
under conditions of high failure relative to success and that persistence after failure
can influence learning. However, persistence after failure (as measured here – fail-
abandon) had a very small effect on learning. It only explains about 4% of the
variance in learning gains. It is possible that the type of persistence or more complex
behavioral patterns in the game will have a greater impact on the learning of high-
failing students. The next section will explore productive persistence and other in-
game behaviors, in hopes of uncovering other possible causes of the learning effects.
The subsequent analyses take place at the level of Analysis 2 (between-subjects failure
by condition), since it was most productive in explaining learning outcomes.

78
CHAPTER 5: BEHAVIORS BEFORE AND AFTER SUCCESS AND FAILURE
Overview of findings
In this chapter, we examine how behaviors both before and after success and
failure predict learning, and how they differ by condition, high/low failers, and their
interaction. Of the behaviors following success and failure, fail-abandon was the most
predictive, so persistence itself had a large effect on learning. How students persisted
had less of an impact on learning in this study. However, some interesting behavioral
patterns emerged from these analyses. For instance, students were more likely to
check resources after failure than after success, particularly amongst low failers. Also,
students in the control group were more likely to play another game on the same level
after experiencing success than after failure. One interpretation of this result is that
the Control students were more risk-averse than the EPB students, and so they were
more likely to stay on a level they knew they could win. However, this success-play-
again behavior was not significantly correlated with learning.
Analyses of behaviors preceding game play show that high failers were more
likely to switch levels before game play. One interpretation is that these students were
jumping from level to level, in search of a game they could win. However, we also
found that level-change-fail (i.e., switch to a new level of the overall game and then
fail) is more common than level-change-success, suggesting that switching levels may
have caused these students to become high failers. Findings must be interpreted with
caution, since we cannot determine the direction of the causal arrows. Future analyses
could explore other measures of preparation for game play that would more precisely
titrate these effects.
Analyses
The prior chapter examined how the experimental treatment affected
persistence and how persistence affected learning. This chapter looks beyond simple
persistence to explore other types of behaviors that precede and follow failure. The
purposes of this section are three-fold. First, we aim to better define the term

79
“productive persistence” by understanding what kinds of responses to failure are
associated with enhanced learning. Second, we explore the actions preceding success
and failure, in an attempt to further explain why the high-failers in the control group
learned less in the game. Third, all analyses are broken out by condition, high/low
failers, and their interaction, to explore the effect of each of these factors on
differences in failure-related behaviors and learning. Because rate of failure as a
between-subjects variable had the most significant effects on learning, we will confine
our analyses to treatment by high/low failers only, and forgo the analyses of high/low
failure situations and prior knowledge.
Analysis 5.1: Productive Persistence
This section explores what students did when they chose to persist. After
students played a game on a level and chose to persist with that level, they could
persist in two ways. Students could either play another game at the same level, or they
could check a relevant resource such as a reading, solution, explanation, or preview.
This section examines whether one of these types of persistence is more productive by
exploring which one is associated with greater learning gains. We expected that
checking a resource after failure would constitute more productive persistence. Rather
than solving the problem through trial and error by playing repeatedly, the students
would be attempting to remediate their faulty understandings through explanations of
the content. If the high-failers in the Control group engaged in less productive
persistence, it could further explain their relatively lower learning gains.
The following analyses will examine two central questions. The first is
whether the rate of each type of persistence differs by condition, by high/low failers,
and their interaction. The second question we test is whether each type of persistence
has consequences for learning, and whether this differs by condition, high/low failers,
and their interaction.
Once again, the measure of each type of persistence was calculated as a rate.
For instance, the rate of checking a relevant resource after failure (“fail-resource”) was
calculated by dividing the total number of fails-followed-by-resource by the total

80
number of fails. Likewise, the rate of persisting by simply playing another game on
the same level (“fail-play-again”) was computed by dividing the total number of fail-
play-again sequences by the total number of fails. We compared these rates to the
“success-resource” and “success-play-again” rates, to effectively control for any
differences in the overall rate of accessing resources or playing continuous games.
Table 5.1 displays the rates for each of these persistence measures, broken out by
condition and high/low failers.
Table 5.1. Rates of various types of responses to success and failure, split by condition and high/low failers. Low Failers High Failers Control EPB Control EPB Success-abandon .39 (.04) .38 (.04) .41 (.04) .60 (.04) Fail-abandon .45 (.05) .38 (.05) .59 (.05) .56 (.05) Success-play-again .58 (.04) .56 (.04) .52 (.04) .34 (.04) Fail-play-again .24 (.04) .32 (.04) .23 (.04) .26 (.04) Success-resource .03 (.02) .05 (.02) .07 (.02) .06 (.02) Fail-resource .32 (.05) .30 (.05) .19 (.05) .19 (.05)
5.1.a Rates of persistence after success and failure, broken out by condition and
high/low failers
To examine differences in resource use after game play, a repeated measures
ANOVA crossed the between-subjects factors of condition and high/low failers,
repeated on the within-subjects factor of success-resource vs. fail-resource. There was
a large main effect of game success- vs. fail-resource, F(1, 127) = 65.34, p < .001,
indicating that students were more likely to check a resource after failure than after
success. There was also a significant interaction of success- vs. fail-resource by
high/low failers, F(1, 127) = 8.83, p = .004, demonstrating that while both high and
low-failers were more likely to check a resource after failure than after success, the
discrepancy between rates was much smaller in the high-failer group. In other words,
high and low-failer students were equally likely to check a resource after success, but
the low-failer group was far more likely to do so after failure. There was also a

81
marginal main effect of failure rate, F(1, 127) = 3.50, p = .06, indicating that low
failers were more likely to check a resource after failure, in general. There were no
other significant effects, F’s < 1. Notably, there were no significant three-way
interactions that might account for the high-failer Control group’s unique learning
outcomes. The bottom two rows of Table 1 display rates of success- and fail-resource.
To explore differences in the rate of play-again persistence, a repeated
measures ANOVA crossed the between-subjects factors of condition and high/low
failers on the repeated, within-subjects factor of success-play-again vs. fail-play-again.
There was a large main effect of success- vs. fail-play-again, F(1, 127) = 125.87, p <
.001, showing that students were twice as likely to play again after success than after
failure. There was also a main effect of high/low failers, F(1, 127) = 7.51, p = .007,
demonstrating that low failers were more likely to play again, regardless of outcome.
There was a significant interaction of high/low failers by success- vs. fail-play-again,
F(1, 127) = 5.70, p = .02, revealing that low failers were more likely to play again
after success. Perhaps this is why they are low failers, because they kept playing
games when they won. There was also an interaction of condition by game outcome,
F(1, 127) = 12.59, p = .001, demonstrating that while both conditions were equally
likely to play again after failure, the Control condition was more likely to play again
after success. This is another indication that the Control students were risk averse,
preferring to play games when they knew they could succeed. Once again, there was
no significant three-way interaction that could contribute to the learning effects for the
high-failing Control students. The middle rows of Table 1 show the rates of game
play following success and failure.
5.1.b Correlations with learning gains, split out by condition, high/low failers, and
their interaction
To examine the relationship between learning and types of persistence, we
computed correlations between learning gains and persistence (play-again and
resource-use) partitioned by success and failure. None of the correlations were
significant (all r’s < .13), suggesting that neither one of these types of persistent

82
behaviors is instrumental for learning in the game. So far, only persistence after
failure (fail-abandon) has been significantly associated with learning outcomes.
5.1 Summary
These analyses showed that students were more likely to check a resource after
failure than after success, particularly amongst low-failer students. Common sense
says that this should be a productive behavior, since checking a resource is probably
an attempt to remediate understanding. However, failing and checking a resource was
not correlated with learning in any group of students. With respect to the play-again
type of persistence, students were more likely to play-again after a successful game,
especially in the Control condition, suggesting that these students were more risk
averse, avoiding potential failure situations. However, since none of these behavioral
measures correlates significantly with learning, we were unable to identify what
counts as productive persistence based on this analysis. So far, we have only been
able to demonstrate that persistence (fail-abandon) matters but not productive
persistence. Also, we did not find that any of these behaviors were related to the
poorer learning outcomes of the high-failer Control group.
Interestingly, these results suggest an alternative interpretation of the findings,
namely that behaviors before/after failure and success cause high or low failure rates
in the game. Since low failers were more likely to play again after success and were
also more likely to view a resource after failure, this suggests a different direction for
the causal arrow. Perhaps engaging in these behaviors causes students to fail less,
placing them in the category of low-failing students. So rather than interpreting these
behaviors as a response to failure, we could interpret them as a cause of failure. If this
were true, then one would expect these behaviors to have a significant association with
learning gains. But given that these behaviors are not correlated with learning,
perhaps they are really a response to failure rather than a cause.

83
Analysis 5.2: Behaviors preceding success and failure
This section examines the events preceding success or failure in the game.
There were no strong hypotheses. But, because the high-failing control group seemed
more sensitive to the effects of failure, it is plausible that this effect may be partially
caused by what students chose to do before game play. To examine this, we compared
conditions and high/low failers on their rates of various behaviors preceding success
and failure, and we also examined the relationship between these behaviors and
learning outcomes.
Events preceding success and failure were broken into three broad categories.
Game play could be preceded by another game played on the same level, checking of
a relevant resource, or a change of levels. Each of these behaviors was computed as a
rate against the total number of successes or failures. For example, the rate of “level-
change-success” is the total number of times students changed levels and then
immediately played a successful game divided by the total number of successful
games. Likewise, the rate of “game-success” is the rate that students played a game,
and then played another successful game in the same level divided by the total number
of successes. Finally, the rate of “resource-success” is the total number of successful
games preceded by relevant resource checks divided by the total number of successes.
Similar rates were computed for failure. Table 5.2 shows the rates of each type of
behavior preceding success and failure, split by condition and high/low failers.
Table 5.2. Rates of actions preceding success and failure, split by condition and high/low failers.
Low Failers High Failers Control EPB Control EPB
Level-change-success .26 (.04) .21 (.04) .31 (.04) .42 (.05) Level-change-fail .32 (.04) .31 (.04) .50 (.04) .53 (.05)
Game-success .54 (.04) .54 (.04) .43 (.04) .39 (.04)
Game-fail .34 (.04) .35 (.04) .24 (.04) .24 (.04)
Resource-success .19 (.04) .26 (.04) .26 (.04) .20 (.04) Resource-fail .34 (.05) .34 (.04) .25 (.04) .23 (.05)

84
5.2.a Test of mean differences by condition, by high/low failers, and their interaction
To test whether one condition or group of high- and low-failers differed in the
rate of level-changes before failure or success, a repeated measures ANOVA was
carried out. The between-subjects factors of condition and high/low failers were
crossed on the repeated, within-subjects measure of level-change-success vs. level-
change-fail. There was a significant effect of high/low failers, F (1, 128) = 16.97, p <
.001, indicating that high-failers were more likely to switch levels prior to playing a
game. One interpretation is that high-failers were switching levels in search of a game
they could pass. Another interpretation is that high-failers took more risks by jumping
straight into game play on new levels, which in turn, causes them to become high-
failers. A significant main effect of success/failure, F (1, 128) = 34.03, p < .001,
demonstrated that failure was more commonly preceded by a level-change. This
makes sense given that students were probably more likely to be successful on a level
they had already worked on in some capacity (either played or examined a resource
beforehand). There was a marginal high/low failer by success/failure interaction, F (1,
128) = 3.45, p = .07, indicating that high failers were more likely to level-change-fail
than level-change-succeed, while low failers were equally likely to do either. Perhaps
high failers took more risks by jumping into harder or less familiar levels of the game,
or perhaps they were engaging in less methodical choices, simply jumping around
from level to level. There were no other significant effects, nor interactions by
condition, F’s < 2.44. The top two rows of Table 2 display the means for level-
change-success and level-change-fail.
To test the effects of continuous game play, a repeated measures ANOVA
crossed the between-subjects factors of condition and hi/lo failers on the within-
subjects factor of game-success vs. game-fail. The repeated measures ANOVA
yielded a large significant main effect of game-success vs. game-fail, F (1, 128) =
81.79, p < .001, showing that successes were more often preceded by game play than
failures. There was also a significant main effect of high/low failers, F (1, 128) =

85
13.20, p < .001, indicating that low failers were more likely to play two consecutive
games in a row. All other effects were insignificant, F’s < 1. See Table 2 for means.
To test the effect of resource use before game play, a repeated measures
ANOVA crossed the between-subjects factors of condition by high/low failers on the
within-subjects factor of resource-success vs. resource-fail. There was a significant
effect of resource-success vs. resource-fail, F(1, 128) = 13.54, p < .001, indicating that
students were more likely to check a resource before failure. There was also a
significant effect of high/low failers by resource-success/resource-fail, F(1, 128) =
8.34, p = .005, suggesting that while high failers were equally likely to check a
resource before success and failure, low failers were far more likely to check a
resource before failure. See Table 2 for means of resource-success and resource-fail.
5.2.b. Correlations with learning
To examine whether the events preceding success and failure affected learning
gains, correlations between learning gains and behaviors are shown in Table 5.3.
Correlations are split out by condition, high/low failers, and their interaction. There
are only three significant correlations. In the Control group, level-change-fail (i.e.,
switch into a level, immediately play a game and fail at that game) is moderately
negatively correlated with learning while it has no relationship in the EPB condition.
A much stronger and more interesting correlation is that high failers in the Control
group have a strong negative correlation between level-change-success and learning
gains. This correlation may reflect a tendency for the high-failer Control group to
leave hard levels and seek out levels they have already mastered, simply to experience
success. This connects with the earlier finding that high-failer Control students tended
to stay on a level where they have experienced success. Both are cases of
conservativism or avoidance of challenge. Finally, there is a positive correlation
between resource-and-then-fail and learning gains in the high-failer control group
only. There is also a positive correlation between resource-success and learning gains
in the same group, so checking resources before game play appears to have helped the
high-failer Control students.

86
Table 5.3. Correlations between learning gains and events preceding success and failure.
*significant at p < .05, ** p < .01
5.2 Summary
This section examined how behaviors preceding success and failure differed by
condition, high/low failers, and their interaction. With respect to level-change
behaviors, one interesting finding is that when students changed levels immediately
before playing a game, they were more likely to fail than succeed. This indicates that
when students did not prepare for a game (either by checking a resource or playing a
game on that level), they were more likely to fail. Also, high-failers were more likely
than low-failers to switch levels and play a game. Again, this suggests that switching
levels before game play leads to failure. However, another interpretation is that high-
failers were desperate to find a level they could pass, so they jumped around from
level to level, playing games along the way, in search of a game they could win.
Unfortunately, the simple measure of transitions from level-change to failure or
success will not allow us to differentiate between these two explanations, and since the
data are correlational, we cannot know which factor is the causal agent.
Analyses of behaviors preceding success/failure revealed that when students
played two games in a row, on the same level, the second game was more often a
success than a failure. Also, low-failers were more likely than high-failers to play two
Low Failers High Failers
All Control EPB Low
Failers High
Failers Control EPB Control EPB Level-change-success -.11 -.22 .01 .07 -.14 .04 .08 -.49** -.01 Level-change-fail -.16 -.26* -.03 -.02 -.01 .01 -.06 -.19 .11 Game-success .17 .22 .11 .04 .14 .05 .02 .22 .19 Game-fail .15 .15 .15 .14 -.06 .11 .19 -.16 .04 Resource – success -.04 .03 -.14 -.12 .03 -.11 -.09 .36 -.20 Resource – fail .03 .14 -.10 -.09 .07 -.09 -.11 .34* -.17

87
consecutive games in a row. Checking a resource before failure occurred more often
than checking a resource before success, especially in the low-failing group. This
suggests that the low-failer students were employing more metacognition. They were
more likely to check a resource when they realized they had low knowledge, but
unfortunately, because they had low knowledge and the resources were difficult, they
were still likely to fail at the game, despite their resource use. However, it is also
possible that students who were low-failers actually failed less because they engaged
in less risky behaviors by continually playing games on the same level (rather than
trying something new).
The relationship between learning and behaviors preceding failure and success
showed some differences by condition and high/low failers. Interestingly, level-
change-fail is negatively correlated with learning, in the Control group. This suggests
that changing levels before failure, which occurs quite frequently, is only instrumental
for learning in the Control condition. Also, level-change-success is negatively
correlated with learning gains, while resource-fail is positively correlated with
learning, in the high-failing Control group only. It is unclear why these behaviors are
only significantly correlated with learning in the high-failing Control group.
Discussion
Other behaviors surrounding success and failure (beyond simple persistence)
did not reveal additional factors that might have contributed to the decrement in
learning gains for the high-failer Control group. The close examination of types of
persistence after failure yielded some interesting results, but it did not help to define
the term “productive persistence” since none of the persistent behaviors was
significantly related to learning outcomes. The exploration of behaviors preceding
success and failure also did not clearly explain the learning effects. However, both
analyses provided some interesting data describing patterns of behaviors around
success and failure. For instance, students were more likely to check a resource before
and after failure than before or after success, especially amongst low-failers. Students
were also more likely to fail than succeed immediately after changing levels.

88
However, students were more likely to succeed when playing another game on the
same level.
There were some interesting findings with respect to condition differences. In
chapter four, we found that Control students, particularly those experiencing high
failure, were more likely to stay on a level they could pass. To corroborate this
finding, analyses in this chapter showed that students were more likely to play again
after experiencing success, particularly in the Control condition. This could occur
because students in the Control condition were more risk-averse than the EPB
students. Without the ego-protective buffer, Control students might have been
protecting their own egos by continuing to play games they knew they could win.
Because this is correlational data, we can only speculate about the cause
behind the relationships in the data. For instance, high-failers were more likely to
switch levels before playing a game. One interpretation is that high failure caused
level-switching; high-failing students were clicking from level to level, in search of a
game they could win. An alternative interpretation which reverses this causal arrow is
that level-switching itself caused high failure because students who were level-
switching were not practicing or checking resources before playing games. Of course,
level-switching and failure could be in a reciprocal relationship as well. In any case,
the interpretations here are provisional and cannot be duly tested without more
sophisticated analyses that take into account whether students return to prior levels
where they have had success.
Moreover, more accurate behavioral measures of what students do prior to
game play are needed to secure some of these claims. For instance, a student could
switch levels and immediately play a game, which we would interpret as a lack of
preparation for game play. However, this student might have checked several
resources on this level much earlier in the sequence of “clicks”, but our measures
would not have captured this. Also, these measures blur the line between behaviors
following game play and behaviors preceding game play. For instance, a student may
play a game, check a resource, and then play another game, all on the same level. It is
unclear whether the resource check was in response to the first game played or in

89
preparation for the next game. Examining what students do before they attempt the
first round on a game level would help eliminate some problems of interpretation here.
There are countless ways to code for behaviors around success and failure; in this
dissertation, we have chosen only one way to assess them (simple transitions between
two events).
In the next chapter, we examine how persistence behaviors can be predicted by
pre-existing differences like motivation and prior achievement in science class. Given
the potential overlap in events preceding and following game play (and the risk of
double-counting), we will constrain our focus to events that occur after success and
failure. Moreover, behaviors after game play are more closely tied to learning
outcomes (especially fail-abandon).

90
CHAPTER 6: PRE-EXISTING INDIVIDUAL DIFFERENCES AS
PREDICTORS OF IN-GAME BEHAVIORS AND LEARNING OUTCOMES
Overview of Findings
This section examines how well pre-intervention measures of individual
differences, including motivation and prior learning, predict learning outcomes and
persistence. It examines these effects across the full sample of subjects, by condition,
by high/low failers, and by their interaction. The results show that pre-existing
differences in global, motivational traits do not predict learning gains, while more
proximal measures of in-game persistence (i.e. fail-abandon) do. This suggests that
examining measures of in-game behaviors does have some predictive power. Another
interesting marginal finding is that prior achievement and failure in the game are better
predictors of learning in the Control condition than in the EPB condition. This
suggests that the EPB manipulation somehow “levels the playing field” for high and
low achievers and also reduces the impact of failure on learning. Finally, failure is
more predictive of both prior achievement and prior learning for the high-failing
group, compared to the low-failing group. This suggests that failure is perhaps more
instrumental for learning amongst students who experience a great deal of it.
Introduction
Many educational outcomes can be largely explained by individual differences
such as prior achievement, prior knowledge, gender, motivation, and so on. Because
these differences exist prior to the educational treatment, this leaves very little room
for the effect of an educational intervention. Educators hope that changeable, state-
like characteristics can have an effect on learning because they offer suggestions for
educational reform. With this in mind, this section examines how pre-existing
individual differences predict in-game behaviors and learning outcomes and whether
more proximal measures, like in-game behaviors add any predictive power. We have
chosen to focus on two individual differences that are particularly critical, given the
context of the work: motivation and prior learning. Because the intervention is

91
designed to affect students’ situational motivation (in response to failure), it is
important to examine whether other, more stable and global aspects of motivation
have an effect on student behavior and learning. For instance, rather than focus on
attributions given in response to failure, the motivational measures collected prior to
treatment assess general motivational traits such as interest in science class and beliefs
about inborn intelligence. One of the questions we pose in this section is how well
pre-existing individual differences in motivational traits predict in-game behaviors and
learning outcomes. If specific behaviors in the game (like fail-abandon) add some
predictive power above and beyond pre-existing differences, then they may prove
useful as measures of persistence that have an impact on learning processes and
outcomes.
Another interesting question is whether the effect of individual differences
differs by our factors of interest. In keeping with the structure of the prior chapter, we
will first conduct our analysis with the full sample of data. Next, we will compare
differences across condition, then across high and low failers. Finally, we will
examine the interaction of condition by high and low failers. Within each of these
analyses, we will examine the relationships between (1) pre-existing differences and
behaviors in response to failure, and (2) pre-existing differences and learning
outcomes.
Given the tremendous number of statistical tests that were conducted for these
analyses, the alpha level for significance has been set to p < .01. For the most part,
correlations that do not meet this criterion will not be discussed as noteworthy effects.
This should help avoid the problem of spurious correlations and lower the chances of a
Type 1 error, plus it renders the number of significant correlations to a tractable level.
We will begin with an analysis of the motivation measures and then move on
to measures of prior learning. The analyses in this section are quite exploratory, and
many of the effects do not have ready explanations relevant to the thesis of the
dissertation. However, they do provide a fuller description of the factors affecting
game play and learning outcomes.

92
Measures of motivation and prior learning
There were seven measures of motivation: self-regulated learning6, mastery
orientation, performance-approach orientation, performance-avoid orientation,
interest, self-efficacy, and fixed intelligence. Each measure was geared towards
motivation in science class (e.g. “I like to show others how smart I am in science
class”).
There were several measures of learning, taken both before and after the
treatment. Measures of learning taken prior to the treatment are used to predict
learning outcomes, measured after treatment. There were two measures of learning
prior to the treatment: science class grades and pretest scores. Science class grades
serve as a measure of prior achievement in science class, while the pretest is a more
specific measure of content knowledge covered in the game. The two post-measures
include failure rate in the game itself, which is the most proximal measure of learning
from the game, and learning gain scores from pre- to posttest.
Hypotheses
There were no specific hypotheses for this section. However, we did make
some educated guesses as to what students with high and low levels of each
motivational type would do, with respect to failure-response behaviors:
• Students high in self-regulated learning or mastery motivation should be more
likely to use resources after failure because they are motivated to learn and
master the content.
• Students with a performance-approach orientation should be more likely to
play again after success because they want to show what they know. They
may also be more likely to change levels after failure, because they primarily
want to demonstrate their ability to succeed.
• Performance-avoid students should be more likely to fail-abandon because
they tend to avoid situations that show their lack of competence.
6 Self-regulated learning is both a motivational and metacognitive measure.

93
• Students with high fixed intelligence beliefs should behave similarly to the
performance-approach and performance-avoid students, because both
orientations are based in a belief of static intelligence that mitigates attempts to
improve.
• Students high in self-efficacy should be less likely to fail-abandon since they
believe they can succeed.
• Depending on the situation, one condition’s individual differences may
correlate more strongly with behaviors and learning. For instance, if the
treatment is decreasing the level of fail-abandon in all EPB students, then
individual differences should have little effect on their rate of fail-abandon.
However, individual differences should have a greater impact in the Control
condition, where the treatment is not pushing all students to engage in a
particular behavior.
• The effects of motivation on behavior and learning may be stronger in the
high-failer group, because motivational resources are often recruited in times
of difficulty.
• Because they are more proximal measures, in-game behaviors should explain
some unique variance in learning gain scores, above and beyond pre-existing
individual differences.
Reliability analyses for motivation and learning measures
Reliability analyses were carried out on each of the seven motivation scales.
Cronbach’s alpha was moderately good on most measures (α ranged from .51 to .84,
Table 6.1). The least reliable scale is the one for fixed intelligence, which makes
sense, given that it has the fewest items. On the whole, the items of each scale are
fairly internally consistent.

94
Table 6.1. Reliability analyses for each motivation scale
Scale Number of
Items Cronbach's
Alpha Self-regulated learning 14 0.84 Mastery orientation 4 0.72 Performance-approach orientation 4 0.68 Performance-avoid 4 0.61 Interest 4 0.78 Self-efficacy 4 0.69 Fixed Intelligence 3 0.51
Because of a lack of item-specific data, it was impossible to do reliability
analyses for science class grades, failure rates, and learning gain scores. However,
both pre- and posttest measures were reliable (αpretest = 0.79, αposttest = 0.83).
Motivation analyses
6.1: Analyses of the full data sample
6.1.a. Average levels of pre-existing motivation
To get an idea for students’ pre-existing motivation, Table 6.2 displays the
means and standard errors for each motivational measure. The self-regulated learning
scale was measured on a different scale (1-7) from the others (1-5). A score of 1
signified that a student “disagreed a lot” with the statement, while a score of 5 or 7
indicated they “agreed a lot.” A rating of 4 (in the case of self-regulated learning) or a
rating of 3 for the other scales indicates the midpoint of the scale or “neutral”
agreement with the statement. On average, students were just above “neutral” on all
scales except for fixed intelligence, where they were closer to a rating of 2 or
“disagree a little.”

95
Table 6.2. Average ratings on motivation measures given prior to treatment Mean SE Self-regulated Learning (1-7) 4.34 0.08 Mastery (1-5) 3.18 0.07 Performance approach (1-5) 3.28 0.07 Performance avoid (1-5) 3.22 0.07 Interest (1-5) 3.28 0.07 Self-efficacy (1-5) 3.51 0.06 Fixed intelligence (1-5) 2.33 0.08
6.1.b. Relationship between individual differences in motivation and pre- and post-
learning measures
How does pre-existing motivation predict learning from the game? How does
it predict prior knowledge and achievement? To answer these questions, Table 6.3
displays correlations between motivation measures and learning measures. Only two
motivational measures correlate with any measure of pre- or post-treatment learning.
Fixed intelligence is negatively correlated with pretest scores and positively correlated
with failure rate. Individuals who more heavily endorsed a model of fixed intelligence
knew less content knowledge before playing the game and experienced more failure
during the game. As Dweck’s (2000) work suggests, beliefs of fixed intelligence can
have many negative impacts on learning behaviors and outcomes because they
discourage students from making an effort.
Table 6.3. Correlations between motivation measures, prior achievement, and learning gains Pre-treatment learning Post-treatment learning
Science grade Pretest Failure rate Learning
Gain Self-regulated learning -.18 .14 -.15 .07
Mastery .09 .02 .00 .00 Performance approach -.02 -.07 .08 .00
Performance avoid -.11 -.16 .16 .01 Interest .02 .03 -.08 -.07 Self-efficacy .21 .22 -.26* .07 Fixed intelligence -.22 -.24* .32* -.04 * significance at p < .01

96
Self-efficacy was a negative predictor of failure. Students who were high in
self-efficacy for science also experienced less failure in the game. Self-efficacy is
often a good predictor of achievement and learning, showing that what students
believe they are capable of doing contributes to learning and performance. Other
motivational measures like self-regulated learning, performance and mastery
orientations, and interest were not significantly associated with any learning measures.
Interestingly, none of the motivation measures were significantly correlated
with learning gain scores, our favored measure of learning from the game. This
suggests that pre-existing motivational measures leave room for in-game measures of
motivation (like persistence) to explain some of the variance in learning gains.
6.1.c. Relationship between pre-existing motivation and in-game behaviors in
response to failure
Even though motivation measures do not predict learning from the game, they
may predict in-game behaviors, some of which do predict learning outcomes. Table 4
in the Appendix displays the correlations between the various persistence type
behaviors that could follow success or failure in the game: abandonment, game play,
or resource use. The only correlation that meets the alpha criterion of .01 is between
self-regulated learning (SRL) and fail-resource (r = .23, p < .01). Students with high
SRL were more likely to check a resource after failure. SRL is also positively
correlated with success-resource but this is not a significant correlation. This suggests
that students who are good self-regulated learners were likely to check resources after
playing a game and especially after a failed game. Perhaps students who were able to
regulate their own learning realized the need to remediate their knowledge after failing
a game.
Interestingly, none of these motivation measures predicted the fail-abandon
behavior. Recall that fail-abandon is negatively correlated with learning gains. The
functional data of fail-abandon may serve as a better learning-relevant motivation
measure for this game-situation than survey data.

97
6.2 Condition Differences
6.2.a. Average levels of pre-existing motivation
To determine whether conditions differed on pre-existing motivation measures,
a multivariate ANOVA tested the effect of condition on all 7 motivation measures:
self-regulated learning, mastery, performance-approach, performance-avoid, interest,
self-efficacy, and fixed intelligence. There was no effect of condition, F(7, 128) = .20,
p = .99, indicating their equivalence at the start of the study.
6.2.b. Relationship between individual differences in motivation and pre- and post-
treatment learning measures
Correlations with pre- and post-treatment learning measures indicate that self-
regulated learning, self-efficacy, and fixed intelligence are all more strongly correlated
in the Control condition (see Table 6.5). These patterns are similar to the ones found
in the full sample of data, but they appear to be driven by the Control condition. Self-
efficacy is a positive predictor of prior learning measures and a negative predictor of
failure in the game, while fixed intelligence predicts in the opposite direction.
Contrary to the analyses from 6.1.a, self-regulated learning is a positive predictor of
science grade and pretest and a negative predictor of failure. These correlations are
only significant in the Control group. However, because these differences between
treatments occur on measures taken prior to the treatment (i.e science grade, pretest),
the correlations between these motivation measures and post-treatment learning
outcomes become suspect. It suggests that these are pre-existing differences in the
way motivation relates to learning/knowledge in the Control group, rather than
differences that occurred as a result of the treatment.

98
Table 6.5. Correlations between measures of motivation and pre- and post-treatment learning measures, split by condition. Pre-treatment learning Post-treatment learning Science Grade Pretest Failure Learning Gain Control EPB Control EPB Control EPB Control EPB
Self-regulated Learning .42* -.02 .34* -.04 -.31 .00 .26 -.15
Mastery .28 -.09 .14 -.11 -.06 .06 .16 -.21
Performance approach -.004 -.02 -.08 -.05 .14 .02 -.10 .12
Performance avoid -.08 -.14 -.17 -.15 .17 .14 .09 -.10
Interest .18 -.12 .19 -.10 -.15 -.02 .15 -.32 Self-efficacy .51* -.08 .39* .04 -.43* -.04 .26 -.19
Fixed intelligence -.32* -.11 -.36* -.13 .41* .23 -.15 .09
* significance at p < .01
6.2.c. Relationship between pre-existing motivation and persistence behaviors
To examine possible differences in how motivation predicts behaviors across
conditions, Table 6.6 in the Appendix demonstrates correlations between motivational
measures and in-game behaviors in response to failure, broken out by condition.
There are two significant correlations that meet the .01 criterion. The first is a small,
negative correlation between performance avoid motivation and the success-play-
again (r = -.37, p < .01) behavior in the EPB condition, while the correlation in the
Control group is close to zero. We predicted that performance avoid would be
negatively correlated with fail-play-again because students would avoid negative
performance situations. However, this was not the case.
Another interesting correlation occurs in the Control condition between
mastery motivation and fail-play-again (r = -.33, p < .01). Students who frequently
failed and then played another game on the same level had lower mastery scores. One
would expect mastery-oriented students, who strive to understand the content and
master the skills necessary for the task, to attempt to rectify any misunderstandings
that led to a failed game. So rather than play again after failure, they might be more
likely to view a resource, and in fact the correlation between fail-resource and mastery

99
is positive (though not significant), corroborating this hypothesis. It is unclear why
this correlation only appears in the Control condition.
6.3 High and low failers
6.3.a. Average levels of pre-existing motivation
To assess group differences in motivation, a multivariate ANOVA tested the
effect of high/low failers on all 7 motivation measures: self-regulated learning,
mastery, performance-approach, performance-avoid, interest, self-efficacy, and fixed
intelligence. There was a significant overall effect of between-subjects failure rate,
F(7, 122) = 3.37, p = .003. Separate univariate ANOVAs revealed that the low-failers
had higher self-efficacy, F (1, 128) = 9.64, p = .002 and endorsed ideas of fixed
intelligence to a lesser degree, F (1, 128) = 10.58, p = .001. Low-failers were
marginally less performance-avoid-oriented, F (1, 128) = 3.35, p = .07, and marginally
higher on self-regulated learning, F (1, 128) = 3.00, p = .09. There were no
differences between students’ endorsement of mastery motivation, performance-
approach motivation, or interest, F’s < 1.42. We predicted that the low-failers would
be higher in most motivation measures in general, so these results are not surprising.
Table 6.7 shows means and standard errors on each motivation measure, for low and
high failers.
Table 6.7. Average ratings on motivation measures, split by high and low learners Low Failers High Failers Mean SE Mean SE Self-regulated Learning 4.46 0.10 4.21 0.11 Mastery 3.20 0.09 3.17 0.09 Performance approach 3.22 0.11 3.35 0.10 Performance avoid 3.09* 0.11 3.35 0.09 Interest 3.37 0.09 3.20 0.10 Self-efficacy 3.69* 0.09 3.33 0.08 Fixed intelligence 2.09* 0.10 2.57 0.11
* significance at p < .05, low-failers vs. high-failers.

100
6.3.b. Relationship between individual differences in motivation and pre and post
learning measures
Once groups were broken out by high- and low-failers, there were no
significant correlations between pre-existing motivational differences and measures of
learning, either pre- or post-treatment (see Table 6.8 in appendix). This suggests that
the majority of the correlations that occurred in the full data sample are picking up
differences between high and low-failers, which essentially controls for the rate of
failure in these analyses.
6.3.c. Relationship between pre-existing motivation and in-game behaviors in
response to failure
Similarly, there were no significant correlations between motivational
measures and post-game behaviors such as fail-abandon, within either the high- or
low-failers (see Table 6.9 in appendix). Once again, the variance between high and
low failing students may be explaining the correlations between motivation measures
and persistence behaviors seen in the Control and EPB groups, so once that variance is
removed by splitting students into high and low failers, the correlations disappear.
This suggests that the motivation measures are really driven by failure; once failure is
controlled for, measures of pre-existing motivation no longer have an impact on
learning and behavior in the game.
6.4. Condition differences and their interaction with high/low failers
In this section we explore the possibility of interactions between condition and
high/low failers in their relationship between motivation and in-game behaviors and
learning measures.
6.4.a. Average levels of pre-existing motivation
To assess pre-existing differences in motivation across groups, a multivariate
ANOVA tested the effect of condition, high/low failers, and their interaction on the 7
motivation measures. As before, the effect of between-subjects failure rate was

101
significant, F (7, 126) = 3.39, p = .002, but condition effects and interactions were not,
F’s < 1.04. So high-failers had different levels of motivations from low-failers, but
high-failers in the Control condition did not look different from high-failers in the
EPB condition prior to the intervention.
6.4.b. Relationship between individual differences in motivation and pre and post
learning measures
There are two significant relationships between learning measures and
motivation measures, when the data are split out by condition and high/low failers.
The low-failer Control group shows a positive correlation between mastery motivation
and science grade (r = .45, p < .01). Students who have a mastery orientation and fail
less also have higher science grades, in the Control condition only. The high-failer
EPB group shows a negative correlation between interest and learning gains (r = -.48,
p < .01). Students who were more interested in the science content but failed a great
deal actually learned less in the EPB condition. There are no obvious explanations for
these effects. See Table 6.10 in appendix for all correlations.
6.4.c. Relationship between pre-existing motivation and in-game behaviors in
response to failure
Table 6.11 (in appendix) displays correlations that examine the relationship
between pre-existing motivation and behaviors in response to failure split by condition
and by high/low failers. Performance-avoid motivation has a moderate, negative
correlation with success-play-again, but only in the high-failing EPB group (r = -.55, p
< .01). This correlation was seen before in the EPB group as a whole, but this finding
suggests that it was driven by the high-failers. Perhaps performance-avoid-oriented
individuals avoid all opportunities for performance, even after a success. This may be
exaggerated in the high-failing EPB condition because motivation comes to bear in
situations of difficulty (high failure) and when there are no other forces pushing
behavior in one way (i.e. the Control “treatment” may be pushing everyone to engage
in performance-avoid behaviors). There is also a negative correlation between interest

102
and fail-play-again in the high-failer Control group (r = -.46, p < .01). This is
counterintuitive because interest should encourage students to continue engaging with
the subject of their interest.
Summary of Motivation Analyses
This analysis revealed that our most robust measure of learning from the game
– learning gain score – was not well-predicted by popular motivation measures or pre-
existing individual differences in motivation as measured by several scales. One
implication of this finding is that educational interventions can focus on changing
situation-specific, in-game behaviors (like persistence) which have an impact on
learning, rather than attempt to change global motivational traits (like interest).
Furthermore, none of the motivational measures were strong predictors of the
fail-abandon behavior which is important for learning from failure. This suggests that
in-game measures of behavior have the capability of explaining interesting
motivational phenomena, such as persistence after failure, that are not captured in
many popular motivational scales. Though perhaps another motivation scale, for
instance, one focused more on attributions, would have shown a stronger relationship
to persistence after failure in the game.
Measures of pre-existing motivation did make some predictions about
behaviors in response to failure. For instance, students who are good self-regulated
learners were more likely to check a resource after failure, presumably to remediate
their understanding. Self-regulated learning encouraged a healthy response to failure
in the game.
Somewhat troublingly, motivation measures were stronger predictors of prior
knowledge, prior achievement, and failure in the Control condition than in the EPB
group. This suggests that there were some pre-existing differences across conditions
in how initial motivation affected their prior learning. This casts some doubt on the
interpretation of any between-condition differences in the relationship between
motivation measures and in-game behaviors and post-treatment learning. These

103
differences may not have been caused by the treatment because they might have
existed prior to the treatment.
Many of the relationships between motivation and prior learning and between
motivation and in-game behaviors disappeared once the sample was split into high-
and low-failers. This suggests that these relationships were really driven by failure
itself (and motivation certainly does correlate with failure). So, failure is a significant
event that has a strong relationship to motivation and behavior, as we shall see in the
next section on prior learning.
Comparison of conditions and high/low failers by condition revealed a few
sporadic significant relationships between in-game behaviors and motivation
measures. However, none of these findings were particularly revealing with respect to
the main foci of the study, nor were they easily explained by motivational theory. It is
possible that due to the enormous number of statistical tests performed the
significance of these correlations was spurious.
Prior learning analyses
Having examined the relationship between pre-existing motivation and
learning outcomes and in-game behaviors, we now turn to explore the association with
prior learning. Once again, we want to determine whether in-game behaviors and
learning can be predicted by prior learning, and whether in-game behaviors have
predictive power for explaining learning outcomes.
There were two major measures of prior learning. The first is students’ end-of-
semester science class grades, given by their classroom teacher (since all students had
the same teacher, we expected science grades to be comparable across subjects).
Another, more proximal measure is pretest score; the pretest was given the day before
the treatment and directly assessed the skills and concepts covered in the game.

104
6.5: Analyses of the full data sample
6.5.a. Average levels of prior learning
To test the differences in prior learning measures between condition, high/low
failers, and their interaction, a separate two-way ANOVA was conducted for each
outcome measure: science grade and pretest score. Each ANOVA showed main
effects of high/low-failers, demonstrating higher science grade and scores for the low-
failers. There was no main effect of condition and no interaction. Results are
displayed in Table 6.12.
Table 6.12. Means and SEs of prior achievement and prior knowledge measures, split by condition and high/low failers.
Low Failers High Failers
Control EPB Control EPB Significant
Effect
Science Grade
92.39 (2.35) 91.47 (2.31) 75.20 (2.16) 71.85 (2.28)
Main effect of failure, p < .001
Pretest 0.66 (0.03) 0.67 (0.03) 0.38 (0.03) 0.37 (0.03)
Main effect of failure, p < .001
6.5.b. Relationship between pre- and post-treatment learning measures
The correlation matrix in Table 6.13 shows that pre and post-treatment
learning measures are closely related. For instance, pretest scores have a large,
negative correlation with failure, suggesting that prior knowledge is explaining a good
deal of the variance in failure rates across individuals. This also means that prior
knowledge is an excellent predictor of performance in the game.
Interestingly, learning gains are not strongly correlated with other measures,
particularly prior learning measures like science grade and pretest. Part of this is by
design, since the learning gain score was supposed to remove the relationship between
pretest and posttest so that it would measure pure learning gain and not differences in
post-test that could be explained by prior knowledge.

105
Table 6.13. Correlation matrix relating pre- and post-treatment learning measures
Science Grade Pretest Failure
Pretest .55* Failure -.62* -.81* Learning Gain .24* .18 -.39*
6.5.c. Relationship between prior learning and in-game behaviors in response to
failure
How does prior learning relate to persistence behaviors in the game? Table
6.14 shows correlations between persistence behaviors in the game and measures of
pre-treatment learning. For comparison’s sake, it also includes measures of post-
treatment learning. Both success and fail-abandon are negatively correlated with
pretest. One interpretation of this result is that students with low prior knowledge
were more likely to abandon a topic. An alternative interpretation is that students who
abandoned in the game were less persistent during learning in general, which has
caused them to learn less from prior instruction. Success and fail-abandon are both
positively correlated with failure. This could mean that students who abandoned were
more likely to fail in the game, or alternatively, students were more likely to abandon
when they experienced more failure.
Another finding is that success-play-again is positively correlated with science
grade and pretest and negatively correlated with failure. Fail-play-again is also
positively correlated with pretest and negatively correlated with failure (though not
significantly so). This suggests that individuals with high prior knowledge or low
failure in the game were more likely to continuously play games. Of course, the same
alternative interpretation applies as before. Students who were likely to persist by
trying again may have learned more from prior instruction.
Correlations with resource use are less clear. There is one significant
correlation between fail-resource and failure rate. Students who frequently checked a
resource after failing also failed less often. If students were learning from the
resources, then we would expect this to decrease their rate of failure.

106
It is interesting that many of these behaviors were predicted by pretest and that
many of these behaviors predicted failure, but the only behavior that predicted
learning gains is fail-abandon (at α = .05, since this was an a priori hypothesis), which
suggests that persistence after failure is critical for learning.
Table 6.14. Correlations between persistence behaviors and pre- and post-treatment measures of learning Pre-treatment Learning Post-treatment Learning Science Grade Pretest Failure Learning Gain Success-abandon -.15 -.24* .29* -.05 Success-play-again .22 .30* -.34* .09 Success-resource -.20 -.19 .15 -.12 Fail-abandon -.17 -.35* .35* -.18+ Fail-play-again .00 .28* -.13 .08 Fail-resource .17 .13 -.25* .13
* significant at p < .01; + significant at p < .05
6.6 Condition Effects
6.6.a. Relationship between pre- and post-treatment learning measures
One interesting difference in the relationship between pre- and post-treatment
learning measures is that in the EPB condition, both science grade and failure are less
predictive of learning gains (see Table 6.15). This suggests that there is something
about the ego-protective buffer intervention that “levels the playing field”, or divorces
the relationship between prior achievement and learning gains. Likewise, failure is
less consequential for learning gains, suggesting that the EPB really does “buffer” the
impact of failure.

107
Table 6.15. Correlations matrix of pre- and post-treatment learning measures, split by condition
Science Grade Pretest Failure
Pretest .57* Failure -.65* -.79* Control Learning Gain .37* .18 -.50* Pretest .54* Failure -.60* -.83* EPB Learning Gain .12 .17 -.28
* significant at p < .01
Regression analyses were run to follow up on these condition differences.
Learning gains were regressed on science grade, condition, and their interaction. As
shown in Table 6.16, the EPB condition and science grade were both significant
positive predictors, while the interaction term was a marginal, negative predictor. This
suggests that when science grade and the interaction between science grade and
condition are controlled for, the EPB condition has a much higher learning gain score.
Also, the “slope” of the relationship between science grade and learning gain is much
less steep in the EPB condition. However, this model only explains 6.4% of the
variance in learning gains. Because the interaction effect is only marginally
significant, the differences between conditions in the relationship between prior
achievement and learning gains are descriptive only.
Table 6.16. Regression results testing condition, science grade, and their interaction. (EPB dummy coded as 1 and Control as 0.)
B Std. Error t Sig. (Constant) -0.23 0.12 -1.93 0.06
EPB 0.31 0.16 1.95 0.05 Science Grade 0.01 0.00 3.24 0.00
EPB * Science Grade 0.00 0.00 -1.85 0.07
Table 6.17 displays the regression results for condition, failure rate, and their
interaction on learning gains. Failure rate is a significant negative predictor of
learning gain, while there is a marginal interaction, showing that failure rate has less
of an impact on learning in the EPB condition. This model explains 16% of the

108
variance in learning gain scores. Once again, these results should be taken with a
grain of salt, since the interaction of failure by condition is only marginally significant.
Table 6.17. Regression results testing condition, failure rate, and their interaction. (EPB dummy coded as 1 and Control as 0.)
B Std. Error t Sig. (Constant) 0.31 0.04 7.83 0.00 Treatment -0.06 0.06 -1.16 0.25 Failure rate -0.32 0.07 -4.67 0.00 Trtmnt * Failure rate 0.17 0.10 1.76 0.08
6.6.c. Relationship between prior learning and in-game behaviors in response to
failure
Correlations between prior learning and behaviors in response to failure show
stronger relationships in the EPB condition (see Table 6.18). Most behaviors in the
EPB condition are predicted by pretest scores and failure rates. For instance, both
success and fail-play-again are positively correlated with pretest, suggesting that high-
pretest scorers were more likely to play games continuously. Conversely, fail-
abandon was negatively correlated with pretest, suggesting that students with low
prior knowledge were more likely to abandon failed levels of the game. The same
relationships occurred with failure rates (though in the opposite direction). Both fail-
abandon and success-abandon were positively correlated with failure in the EPB
condition, which suggests that high-failing EPB students were more likely to abandon.
It is unclear why these behaviors are better predicted in the EPB condition. Finally,
one interesting relationship is that science grade negatively predicts success-resource
in the Control condition only.

109
Table 6.18. Correlations between learning measures and behaviors preceding success and failure Science Grade Pretest Failure Learning Gain
Control EPB Control EPB Control EPB Control EPB Success-abandon -.11 -.19 -.19 -.31 .19 .42* -.06 -.08 Success-play-again .23 .21 .18 .44* -.24 -.47* .10 .13 Success-resource -.37* -.05 .01 -.32 .18 .12 -.14 -.13 Fail-abandon -.10 -.25 -.24 -.46* .25 .47* -.14 -.23 Fail-play-again -.10 .09 .18 .37* .01 -.27 .05 .10 Fail-resource .17 .18 .11 .15 -.25 -.25 .11 .16
* significant at p < .01
6.7 High and low failers
6.7.a. Relationship between pre- and post-learning measures
An interesting difference between high- and low-failers is that for low-failers,
pretest is more closely related to science grades and learning gains, while for high-
failers, failure is more predictive of learning gains and science grades (see Table 6.19).
So, for students who experienced a great amount of failure in the game, that failure is
related to measures of prior learning but it also predicts future learning. Whereas, for
low-failers, failure did not have as large of an impact on prior and future learning. For
low-failers, pretest is the best predictor of learning gain, while for high-failers, failure
rate is most predictive of learning gain. Once again, failure is an important event for
students who experience a great deal of it.

110
Table 6.19. Correlation matrix between pre- and post-learning measures, split by high and low failers.
Science Grade Pretest Failure
Pretest .38* Failure -.15 -.42* Low Failers Learning Gain -.18 -.29 -.12 Pretest .21 Failure -.39* -.68* High Failers Learning Gain .20 .08 -.27
6.7.b. Relationship between prior learning and in-game behaviors in response to
failure
The only significant correlation here is between pretest and fail-play-again in
the low failers group (r = .37, p < .01). Low-failers with high pretest scores were
more likely to fail-play-again. Perhaps low-failers with high prior knowledge were
more likely to believe that they could succeed after failure if they tried again, whereas
students who experienced more failure were less likely to believe they could succeed.
See Table 6.20 in the appendix for the full table of correlations.
6.8. Condition by high/low failers
6.8.a. Relationship between pre- and post-treatment learning measures
There are two interesting relationships that emerged from this analysis. As
shown in Table 6.21, science grade is a strong negative predictor of failure in the high-
failer Control group. This suggests that high-failer Control students were following
the same pattern in the game as they do in science class (i.e. failure in science class
translates to failure in the game), while low-failers and to a lesser degree, high-failer
EPB students, were more likely to stray from that path. As usual, pretest is a strong
negative predictor of failure in most groups except for the low-failer Control group.
For them, pretest is a strong negative predictor of learning gain. This means that
students with low pretest scores in the low-failer Control group are making large gains
from pre- to post-test. There is no clear explanation for this effect.

111
Table 6.21. Correlation matrix of pre- and post-learning measures split by condition and high/low failers
Science Grade
Pretest Failure
Pretest .35 Failure -.19 -.31 Control Learning Gain
-.18 -.49* -.21
Pretest .40 Failure -.11 -.50*
Low Failers
EPB Learning Gain
-.21 -.08 -.02
Pretest .20 Failure -.42* -.61* Control Learning Gain
.30 -.09 -.13
Pretest .22 Failure -.34 -.76*
High Failers
EPB Learning Gain
.18 .21 -.45
* significant at p < .01
6.8.b. Relationship between prior learning and in-game behaviors in response to
failure
The one significant correlation appears between fail-play-again and pretest
scores in the low-failer EPB group (r = .51, p < .01). Students with more prior
knowledge about the content covered in the game were more likely to play again after
failure, particularly in the low-failer EPB condition. These correlations are more
attenuated in the other three groups. It is unclear why this correlation is stronger in the
low-failing EPB condition. See Table 6.22 in the appendix for the full table of
correlations.
Summary of Prior Learning Analyses
Some interesting new findings appeared when learning measures given prior to
the treatment are related to in-game behaviors and post-learning measures. First, prior
achievement is predictive of learning gains in the Control condition only. This
suggests that the EPB intervention reduces the relationship between pre-existing
learning differences and future learning outcomes. This is an exciting finding, given

112
that learning outcomes are usually very well-predicted by pre-existing differences that
are difficult to change. However, some measures of prior learning (pretest) were more
predictive of behaviors made in response to success and failure in the EPB condition.
It is unclear why measures of prior learning in the EPB condition do not predict future
learning but do predict in-game behaviors (like fail-abandon).
It also interesting to note that among the high-failers, failure in the game is a
strong predictor of both past and future learning. This suggests that failure is a critical
event for students who experience large amounts of it. These findings dovetail nicely
with the main finding in chapter 4, that high-failing students in the control condition
learn less than their low-failing counterparts.
Finally, as shown before, fail-abandon is the only persistence-related behavior
that predicts learning across the full sample of subjects. This means that persistence
after failure is critical, not simply persistence in general. The type of persistence,
whether consulting resources or playing another game, is less important for learning.
Discussion
There are many interesting findings from this chapter; we will discuss the
findings that are most meaningful with respect to the central foci of the research. One
question we posed in this section is how well in-game behaviors predict performance
and whether they add some predictive power, above and beyond measures of pre-
existing motivation and prior knowledge. We found that simple persistence after
failure (as embodied by the fail-abandon behavior) was the best predictor of learning
gains, when compared to other persistence type behaviors (e.g. success-abandon, fail-
resource, fail-play-again, etc.). Moreover, fail-abandon is a better predictor of
learning gains than more global, motivational measures. In fact, none of the
motivational scales were correlated with learning gains, nor did they predict the fail-
abandon behavior. This suggests that fail-abandon could serve as a behavioral
measure of persistence, and that this type of behavioral measure is more proximal to
learning than more global measures of motivational traits or perhaps more survey-
based measures of motivation. However, since fail-abandon is only weakly correlated

113
with learning and is less strongly correlated than other measures of prior learning,
such as science grade and failure in the game itself, fail-abandon is not the best
predictor of learning gains.
With respect to condition effects, the most interesting findings are that prior
achievement and failure in the game are marginally better predictors of learning in the
Control condition than in the EPB condition. This suggests that learning in the EPB
group is divorced from prior achievement; in a sense, the EPB manipulation has
“leveled the playing field” for high and low-achieving students. Also, learning in the
EPB condition is less sensitive to failure in the game; EPB students are more resistant
to the effects of failure on learning.
High-failers are extremely sensitive to failure. For high-failers, failure in the
game correlates with both prior achievement and prior knowledge. For high-failers,
failure is a meaningful event that, may consistently affect their learning in the past and
the present. For low-failers, prior knowledge is a critical measure that predicts both
prior achievement and failure in the game. What low-failers know predicts what they
learned before and how well they perform in the game. Given these results, it makes
sense that provision of an ego-protective buffer is more meaningful in the high-failing
group. For them, failure is most critical for learning.
Because these findings are based on correlational data, it is impossible to make
causal conclusions. We can speculate about the directions of the causal arrows, but
our interpretations must be taken with a grain of salt, because we cannot know the
cause of two variables that are associated with one another.

114
Appendix to Chapter 6
* significance at p < .01 in all tables below
Table 6.4. Correlations between motivation measures and persistent behaviors in the game
Success-abandon
Success-play-again
Success-resource
Fail-abandon
Fail-play-again
Fail-resource
Self-Regulated Learning
-.01 -.05 .16 -.15 -.11 .23*
Mastery .01 -.04 .10 -.06 -.14 .16
Performance Approach
.11 -.15 .11 .05 -.06 -.01
Performance Avoid
.17 -.22 .15 .22 -.12 -.13
Interest -.07 .01 .16 .03 -.17 .10
Self-efficacy -.01 -.01 .07 -.17 -.06 .22
Fixed Intelligence
.12 -.10 -.06 .17 -.03 -.15
Table 6.6. Correlations between motivation measures and persistent behaviors in the game, split by condition
Success-abandon
Success-play-again
Success-resource
Fail-abandon
Fail-play-again
Fail-resource
Ctl EPB Ctl EPB Ctl EPB Ctl EPB Ctl EPB Ctl EPB
SRL
-.05 .03 -.01 -.10 .14 .18 -.12 -.17 -.13 -.10 .21 .28 Mastery .07 -.06 -.12 .04 .14 .05 .07 -.20 -.33* .04 .16 .17
Perf. Approach -.01 .22 -.01 -.29 .05 .16 .07 .04 -.01 -.11 -.06 .06 Perf. Avoid .05 .29 -.08 -.37* .10 .20 .21 .24 .04 -.30 -.23 .02 Interest .04 -.15 -.08 .07 .11 .20 .13 -.07 -.27 -.07 .06 .14 Self-efficacy -.04 .01 .06 -.09 -.06 .20 -.10 -.25 -.13 .00 .19 .26 Fixed Intell. .08 .14 -.11 -.05 .10 -.21 .15 .21 .07 -.15 -.19 -.09

115
Table 6.8. Correlations between motivation measures and pre and post learning measures, broken out by high and low failers
Pre-treatment Learning Post-treatment Learning Science Grade Pretest Failure Learning
Low Failers
High Failers
Low Failers
High Failers
Low Failers
High Failers
Low Failers
High Failers
Self-regulated Learning .16 .10 .01 .12 .01 -.10 .02 .04
Mastery .28 .02 .05 -.03 -.07 .10 .13 -.16 Performance-approach .12 -.02 .06 -.08 .15 -.03 .07 -.02
Performance-avoid -.23 .10 -.18 .00 .24 -.10 .02 .10
Interest .21 -.16 .04 -.13 -.08 .07 .08 -.30 Self-efficacy .25 -.05 .17 -.06 -.13 .04 .02 -.08 Fixed Intelligence -.14 -.03 -.13 -.06 .09 .22 .12 -.02
Table 6.9. Correlations between motivation measures and persistent behaviors, split by high and low failers
SRL Mastery Perf.
Approach Perf. Avoid Interest Self-
efficacy Fixed Intell
Low Failers .08 .03 .09 .03 .07 -.02 -.18 Success-
abandon High Failers .01 .03 .12 .24 -.11 .16 .23
Low Failers -.12 -.07 -.12 -.09 -.13 .01 .12 Success-
play-again High
Failers -.09 -.06 -.16 -.29 .04 -.23 -.13
Low Failers .15 .15 .12 .18 .19 .03 .19 Success-
resource High Failers .20 .09 .10 .13 .17 .16 -.23
Low Failers -.17 -.13 .11 .26 .03 -.12 .10 Fail-
abandon High Failers -.04 .05 -.07 .06 .11 -.06 .09
Low Failers -.13 -.03 .06 .02 -.13 -.04 .17 Fail-
play-again High
Failers -.13 -.27 -.20 -.28 -.23 -.18 -.19
Low Failers .25 .14 -.14 -.25 .07 .13 -.22 Fail-
resource High Failers .16 .20 .26* .19 .09 .23 .08

116
Table 6.10. Correlations between motivation measures and learning measures, split by condition and high/low failers.
Control EPB Control EPB Control EPB Control EPB Control EPB Control EPB Control EPB Control EPB
Self-Regulated Learning .35 .01 .40* -.12 .17 -.11 .32 -.04 -.17 .20 -.28 .07 .08 -.06 .30 -.22
Mastery .45** .14 .30 -.19 .17 -.07 .14 -.16 -.11 -.03 -.02 .21 .22 -.01 .05 -.35Performance Approach .06 .17 .13 -.17 .14 -.01 -.10 -.06 .20 .09 -.01 -.05 .07 .11 -.21 .15Performance Avoid -0.40* -.05 .35* -.08 -.12 -.27 -.17 .11 .33 .12 -.13 -.08 .17 -.24 .16 .04
Interest .32 .12 .04 -.29 .37* -.32 -.08 -.16 -.19 .05 -.04 .15 .16 -.07 -.01 -.48**Self-efficacy .41 .13 .38* -.36 .29 .08 .00 -.13 -.29 .05 -.07 .14 .07 -.09 .06 -.33Fixed Intelligence -.24 -.05 -.17 .10 -.22 -.06 -.23 .09 .17 -.01 .40* .02 .22 .03 -.29 .19
Learning Gain
Low Failers High Failers
Pretest Failure Rate
Low Failers High Failers Low Failers High Failers Low Failers High Failers
Science Grade

117
Table 6.11. Correlations between motivation measures and in-game behaviors, split out by condition and high/low failers.
SRL Mastery Perf.
Approach Perf.
Avoid Interest Self-
efficacy Fixed Intell.
Control -.11 -.07 -.08 .02 -.03 -.26 -.13 Low Failers EPB .24 .13 .21 .05 .19 .18 -.22
Control .02 .19 .02 .06 .12 .22 .20 Success-abandon High
Failers EPB .00 -.10 .30 .38 -.27 -.01 .23 Control .05 -.02 -.02 -.10 -.01 .24 .06 Low
Failers EPB -.26 -.12 -.19 -.07 -.27 -.18 .19 Control -.09 -.21 .02 -.04 -.17 -.19 -.16
Success-play-again High
Failers EPB -.12 .06 -.50 -.55* .18 -.21 -.02 Control .25 .34 .37 .27 .16 .14 .30 Low
Failers EPB .10 -.01 -.06 .10 .26 -.01 .08 Control .18 .09 -.10 -.04 .16 -.04 -.05
Success-resource High
Failers EPB .23 .07 .33 .29 .17 .38 -.38 Control -.23 .00 .10 .19 .07 -.06 .16 Low
Failers EPB -.09 -.36 .15 .41 -.03 -.22 .04 Control .16 .21 -.05 .14 .34 .14 -.02
Fail-abandon High
Failers EPB -.20 -.09 -.10 .00 -.04 -.24 .21 Control -.09 -.25 .10 .30 -.13 -.04 .26 Low
Failers EPB -.17 .22 .00 -.37 -.14 .01 .05 Control -.19 -.43 -.12 -.40 -.46* -.33 -.10
Fail-play-again High
Failers EPB -.07 -.14 -.29 -.19 -.06 -.06 -.29 Control .26 .15 -.15 -.35 .02 .08 -.30 Low
Failers EPB .25 .13 -.14 -.04 .15 .19 -.08 Control .01 .19 .17 .23 .08 .16 .13
Fail-resource High
Failers EPB .30 .23 .37 .17 .10 .33 .03

118
Table 6.20. Correlations between persistence behaviors and pre- and post-treatment learning measures, split by high/low failers Science Grade Pretest Failure Learning Gain
Low
Failers High
Failers Low
Failers High
Failers Low
Failers High
Failers Low
Failers High
Failers
Success-abandon -.05 .00 -.10 -.09 .07 .25 -.02 .07
Success-play-again .08 .09 .15 .17 -.10 -.29 .05 -.02
Success-resource -.09 -.19 -.18 -.20 .12 .10 -.09 -.13
Fail-abandon -.12 .06 -.14 -.25 .28 .12 -.06 -.11 Fail-play-again .03 -.12 .37* .23 -.15 -.07 .04 .04
Fail-resource .10 .03 -.16 .07 -.15 -.07 .02 .09

119
Table 6.22. Correlations between pre and post learning measures and responses to failure, split by condition and high and low failers.
Control EPB Control EPB Control EPB Control EPB Control EPB Control EPB Control EPB Control EPB
Success-
abandon -.12 -.01 -.09 .16 -.26 .00 -.14 -.05 .28 -.10 .30 .19 -.05 .00 -.01 -.14
Success-
play-again .15 .03 .22 -.16 .26 .09 .08 .31 -.27 .03 -.28 -.32 .05 .04 .07 .22
Success-
resource -.10 -.07 -.357* -.02 .05 -.32 .19 -.407* -.07 .21 .03 .18 .00 -.14 -.20 -.13
Fail-
abandon -.13 -.14 .20 -.05 -.10 -.20 -.12 -.365* .29 .31 -.09 .33 -.04 -.15 .03 -.22
Fail-play-
again -.16 .17 -.14 -.09 .20 .506** .23 .24 .06 -.388* .03 -.19 .05 .09 .00 .05
Fail-
resource .22 -.03 -.09 .12 -.04 -.30 -.09 .19 -.31 .07 .07 -.20 .01 .05 -.03 .19
Low Failers High Failers Low Failers High FailersLow Failers High Failers Low Failers High Failers
Science Grade Pretest Failure Learning Gain

120
CHAPTER 7: CHOICES OF DISCRETE EVENTS
Overview of findings
This chapter explores discrete choice events and their correlation with learning
outcomes, split by condition, high/low failers, and their interaction. Unfortunately,
there were few correlations between discrete events and learning outcomes that met
our stringent .01 criterion, however there were some interesting findings. About 55%
of students’ choices in the learning environment were made up of game play, while
45% were resource use. The least used resources were reading, solutions, and
explanation. This is unfortunate, since the explanation resource was, arguably, the
most “helpful” of the bunch. Opposite our common sense predictions, resource use
tended to negatively predict learning, while game was a positive predictor. It is
possible that we need more refined measures of resource use (rather than just mere
counts) to find a benefit for resource use.
Time on task was the best predictor of learning, of all in-game measures of
behavior. The more time students spent on task, the more they learned. One
interesting finding is that high-failing Control students made more total “clicks” or
choices in the game compared to the other three groups. The total number of clicks
does not correlate with learning outcome, but it is an interesting difference. Perhaps
the high-failing Control group was engaging in more random clicking behaviors.
Analysis Logic
This analysis examines discrete events undertaken in the game and how these
events relate to pre-existing motivation and pre- and post-treatment learning measures.
The game was designed to contain six discrete learning choices: games, reads,
previews, feedbacks, solutions, and explains. This analysis examines the frequency
with which these choices occur and whether engaging in these actions relates to
learning. It also explores how discrete choice behaviors relate to pre-existing

121
differences of motivational traits and prior learning. Another goal of the analysis is to
examine the types of choices students make when they regulate their own learning.
Since this is a completely exploratory analysis, there are no a priori hypotheses
to guide this investigation. However, given the different learning gains for the high-
failing control group uncovered in the prior chapter, we chose to explore whether
choices and their effect on learning outcomes differ by condition, by high- and low-
failing individuals, and by their interaction.
This analysis will examine each factor separately and in the following order:
1. Full sample
2. Condition
3. High vs. low failers
4. Condition by high/low failers
Each analysis will explore two central questions:
(1) How does the factor of interest affect frequencies of choices? To test this,
simple t-tests and ANOVAs will be carried out to compare means across levels of
each factor.
(2) How does the factor of interest affect the relationship between choice
frequencies and learning outcomes? To test this question, correlations will be used to
gain a broad understanding of the relationship between learning and choices for each
level of the factor.
Given the exploratory nature of these analyses, we will use an alpha criterion
of .01 to designate significant effects. Since a large number of statistical tests are
being done (largely correlations), this alpha correction will reduce the number of
spurious effects that occur by chance.

122
7.1 Full sample
7.1.a Frequencies and proportions of discrete choices
To describe in-game behaviors, Table 7.1 displays the total number of choices
made across two days of game play7. Discrete choices include: playing a game,
reading, previewing, viewing feedback on a game played, viewing solutions for played
games, and reading explanations of those solutions. The “Any Resource” category
lumps together all choices except game play.
The frequency of each choice type was converted to a proportion out of the
total number of choices. Computing proportions essentially controls for the total
number of choices made by each individual. For instance the games proportion is the
total number of games played divided by the total number of choices made, over two
days of game play. On average, students made about 62 discrete choices. 55% of
these choices were constituted by game play, 45% were some type of resource.
Previews and feedbacks made up 39% and 35% of all resource use, respectively.
Reading, checking solutions, and viewing explanations of those solutions made up the
remaining 17% of resource use. Of these, explanations were visited the least
frequently.
Table 7.1. Sums and proportions of choices and failures
Sum Proportion
Games 32.18 (1.01) .55 (.02)
Reads 3.34 (0.42) .06 (.01)
Previews 11.39 (1.13) .16 (.01)
Feedbacks 10.25 (0.69) .16 (.01)
Solutions 3.21 (0.30) .05 (.005)
Explains 1.39 (0.17) .02 (.002)
Any Resource 29.58 (1.76) .45 (.02)
7 All choices were highly correlated across days 1 and 2 of the treatment, so they were collapsed.

123
Other interesting metrics of game behavior include the total number of choices
made (M = 61.77, SE = 2.09) and total time on task8 (M = 49.40, SE = .54).
7.1.a Correlations with learning gains
To get a feel for the relationship between discrete choices and learning,
proportions of each choice were correlated with learning gain scores. Proportions
were chosen for use in all analyses because they tend to be fairly normally distributed,
while the distributions of count data are often positively-skewed.
Table 7.2 in the appendix displays correlations between the proportions of
various choice types and learning gain score. None of the correlations are significant
at the .01 level, however, there are some surprising trends. Learning gain has a small
positive relationship with games played and very slight, non-significant negative
relationships with each type of resource. Summing across all resources (any resource)
reveals a negative correlation between resource use and learning gains. One might
suspect that resource use would be positively correlated with learning, since the intent
of the resources was to help students learn, so this is a puzzling result.
The total number of choices made is not correlated with learning. Total time
on task is one of the strongest predictors of learning gains, indicating that more time
on task was associated with greater learning gains (r = .34, p < .01).
7.1 Summary
These analyses revealed some interesting descriptions of in-game behavior.
First, the majority of students’ choices were made up of game play. Other choices
were comprised of various types of resources; the most often-used were previews and
feedbacks. The “explains”, which provided very specific advice on how to solve
problems and which required a deeper level of processing than many other resources,
were rarely used.
8 Total time on task is the total amount of time students spent across each of the six learning choices in the game. While all students spent the same amount of time at the computer, some students spent more of that time on the homepage (which was not included as one of the six learning activities).

124
Correlations between discrete, in-game choices and learning gains were small
and non-significant, suggesting that discrete choices were not excellent predictors of
learning from the game. Though non-significant, resources tended to negatively
predict learning, while game play was a positive predictor. The best behavioral
predictor of learning was time on task. The more time students spent engaging with
the game, the more they learned.
7.2 Condition effects
7.2.a Frequencies and proportions of discrete choices
This section examines whether in-game behaviors and their relationships with
learning gains differ by condition. Table 7.3 in the Appendix shows the total number
and proportion of discrete choice types split by control and EPB conditions. There
were no significant differences between conditions in either the sum or proportion of
each choice type.
7.2.b Correlations with learning gains
To determine whether the relationship between learning and choice patterns
differs by condition, correlations between each in-game behavior and learning were
computed, as shown in Table 7.4 in the Appendix. The only significant predictor is
time on task, which is a positive predictor of learning in both conditions (rControl = .33,
rEPB = .37, p’s < .01).
7.2 Summary
Analyzing choice patterns separately by condition did not reveal any strong
(nothing met the .01 criterion) differences between groups. Condition did not affect
the way students distributed their choices in the game nor the relationship between
choices and learning outcomes. Time on task is positively related to learning in both
conditions.

125
7.3 High and Low Failers
7.3.a Frequencies and proportions of discrete choices
High and low failers show many interesting differences in choice patterns, as
depicted in Table 7.5. Given that high failers make slightly more total choices (though
not significantly so), proportions should give a more accurate depiction of differences
between groups. For high failers, games make up a smaller proportion of their
choices, while feedbacks and solutions make up a slightly larger proportion. High
failers also spend less time on task. This is consistent with the general pattern that
learning gain correlates (which is correlated with failure) positively with game use and
time on task and negatively with solutions and explains.
Table 7.5. High and Low failers’ mean sums and proportions of choices. Sums Proportions Low Failers High Failers Low Failers High Failers Games 33.07 (1.12) 30.72 (1.49) 0.60(0.02)* 0.49 (0.02) Reads 3.16 (0.64) 3.27 (0.47) 0.05 (0.01) 0.06 (0.01) Previews 11.29 (1.31) 12.41 (1.73) 0.17 (0.02) 0.16 (0.02) Feedbacks 7.49 (0.65)* 13.39 (1.04) 0.12 (0.01)* 0.20 (0.01) Solutions 2.46 (0.35)* 4.19 (0.48) 0.04 (0.004)* 0.06 (0.01) Explains 1.04 (0.19) 1.81 (0.29) 0.02 (0.003) 0.03 (0.004) Any Resource 25.45 (2.17)* 35.07 (2.54) 0.40 (0.02) 0.51 (0.02) Total Choices 58.52 (2.44) 65.78 (3.11) 58.52 (2.44) 65.78 (3.11) Time on Task 52.40 (0.64)* 46.60 (0.72) 52.40 (0.64)* 46.60 (0.72)
7.3.b Correlations between choices and learning gains
Choice patterns of high and low failers were not very predictive of learning
gains, according to the correlations shown in Table 7.6 in the appendix. There is only
one significant, positive correlation between time on task and learning in the high-
failer condition (r = .31, p < .01).
7.3 Summary
High and low failers did have some interesting differences in the way they
approached the game. Low failers played more games and accessed fewer post-game
resources (solutions and feedbacks). They also invested more time into the game

126
overall, while high failers, by inference, must have spent more time on the homepage
(given that all students spent equal time on the computer). Perhaps high failers spent
more time deliberating between different levels of the game or choosing where to
click, or perhaps they were simply less engaged with the game overall. Given that
high failers experienced quite frequent failure (74% of games were lost), it is plausible
that this continued experience of failure would discourage time and effort spent on a
“losing battle.”
7.4 Condition by high/low failers
7.4.a Proportions of discrete choices
To examine differences in how students apportioned their “clicks” in the game,
Table 7.7 in the appendix displays mean proportions for various choice types, split by
high/low failers and condition. For the sake of simplicity, only proportions of choices
are depicted in Table 7. Given differences in the total number of choices across
groups, proportions seemed a more accurate measure for comparing discrete choices.
Two-way, factorial ANOVAs crossing the factors of condition by high/low failers
predicted each choice type or outcome measure listed below. Significant interactions
are marked with an asterisk. The only significant interaction occurred for the total
number of choices; the high failing control group made marginally more total choices
than any other group. One hypothesis is that high-failing control students who did not
have access to an ego-protective buffer, did more “clicking around” to either search
for a game they could actually pass or simply “kill time” until the end of the period.
Anecdotally, the experimenter noticed a set of students who seemed to be aimlessly
clicking on pages without engaging with them; this appeared to be a socially
acceptable way for these kids to opt out without actually quitting. Perhaps these were
the high failing control students, and this is showing up in their higher total number of
choices.

127
7.4.b Correlations with learning gains
Correlations between learning gains and discrete choices and in-game
behaviors do not reveal any striking differences across the four groups. There is only
one significant correlation: time on task is positively correlated with learning gain for
the high failing EPB group. See Table 8 in Appendix for all correlations.
7.4 Summary
A few insights were uncovered by this condition by high/low failers analysis.
The high-failing Control group made more total choices than the other three groups.
One explanation is that these students who were experiencing frequent failure
attempted to opt out of the game by randomly clicking, while high-failing EPB
students did not have the same failure avoidance tendency. Interestingly, time on task
is particularly predictive for the high-failing EPB group, where more time on task
predicts learning. This is the same pattern that was uncovered in the condition
analysis, though it seems to be more exaggerated in the high-failing group.
Discussion
This chapter uncovered some interesting patterns with respect to general
resource use. Students, on the whole, used a small proportion of each resource,
particularly explains, solutions, and reads. Oddly, resource use tended to be
negatively (though not significantly) related to learning gains. Even when pretest
scores and failure rates are partialled out, some of these negative correlations remain.
One interpretation is that the resources are not well-constructed. Another
interpretation is that our measures are not capturing nuanced enough behavioral
sequences. For example, it may be that resource use is only helpful if it lasts for
longer than 1 minute.
Not surprisingly, time on task was positively correlated with learning. No
measures were significant when the data were broken out by condition. Low failers
did show some interesting differences. They spent more time on task, were more
likely to play games and less likely to check a resource, relative to high failers.

128
Finally, the high-failing control group made significantly more total choices.
However, total choices is not correlated with learning gains. So this is not a plausible
explanation for the lower learning gains in the high-failing control group.

129
Appendix to Chapter 7
Table 7.2. Correlations between choice types and learning learning gains
Games .21 Reads -.08 Previews -.09 Feedbacks -.14 Solutions -.11 Explains -.01 Any Resource -.21
* significant at p < .01
Table 7.3. Sums and proportions of in-game choices and failures, split by
condition.
Sum Proportion Choices Control EPB Control EPB
Games 32.57 (1.13) 31.13 (1.52) 0.53 (0.02) 0.56 (0.02) Reads 3.10 (0.57) 3.34 (0.54) 0.04 (0.01) 0.06 (0.01) Previews 13.79 (1.74) 9.92 (1.30) 0.18 (0.02) 0.15 (0.02) Feedbacks 11.99 (1.02) 9.08 (0.83) 0.17 (0.01) 0.15 (0.01) Solutions 3.71 (0.47) 3.00 (0.39) 0.05 (0.01) 0.05 (0.01) Explains 1.67 (0.28) 1.21 (0.22) 0.02 (0.004) 0.02 (0.003) Any Resource 34.25 (2.69) 26.55 (2.06) 0.47 (0.02) 0.44 (0.02) Total Choices 66.82 (3.03) 57.68 (2.54) N/A N/A Time on task 49.90 (0.81) 48.89 (0.72) N/A N/A
* significant at p < .01
Table 7.4. Correlations between proportions of discrete choices and learning gains Control EPB Games .20 .22 Reads .13 -.26 Previews -.01 -.17 Feedbacks -.23 -.02 Solutions -.23 .04 Explains -.12 .14 Any Resource -.20 -.22 Total Choices -.03 .10 Time on Task .33* .37*

130
Table 7.6. Correlations between proportions of discrete choices and learning gains, for low and high failers Low Failers High Failers Game .15 .10 Read -.10 -.03 Preview -.16 -.07 Feedback .02 -.03 Solution -.07 -.01 Explain .07 .02 Any Resource -.15 -.10 Total Choices .00 .12 Time on Task .11 .31*
* significant at p < .01
Table 7.7. Proportions of various activities by high/low failers and condition
Low Failers High Failers Significant
interactions? Choices Control EPB Control EPB
Games .61(.03) .59
(.03) .46
(.02) .52
(.03)
Reads .05(.01) .05(.01) .04
(.01) .08
(.02)
Previews .16
(.02) .18
(.02) .19
(.03) .13
(.03)
Feedbacks .12
(.01) .12
(.01) .22
(.02) .18
(.02)
Solutions .04
(.01) .04
(.01) .07
(.01) .06
(.01)
Explains .02
(.004) .01
(.004) .03
(.01) .02
(.01) Any Resource
.39 (.03)
.41 (.03)
.54 (.03)
.48 (.03)
Total Choices 58.55 (3.69)
58.50 (3.28)
73.82 (4.38)
56.83 (3.94) p = .05*
Time on Task 53.45 (1.04)
51.44 (.77)
46.89 (1.00)
46.27 (1.07)
* significant at p < .05

131
Table 7.8. Correlations with learning gain score by high/low failers and condition Low Failers High Failers Control EPB Control EPB Games .10 .20 -.24 .21 Reads -.04 -.20 .34 -.27 Previews -.13 -.17 .23 -.24 Feedbacks .18 -.13 -.11 .13 Solutions -.17 .05 -.14 .11 Explains -.07 .26 .05 .07 Any Resource -.10 -.20 .24 -.21 Total Choices .09 -.14 .17 .26 Time on task .06 .13 .21 .46*
* significant at p < .01

132
CHAPTER 8: DISCUSSION
This study explored the importance of persistence in the face of failure with
respect to learning. Seventh grade students were immersed in a computer-based
genetics game that contained a plethora of learning choices. Students could choose
what game topic to learn, what resource(s) would help them learn it, and when to
move on to a different topic. Given the opportunity to regulate their own learning,
persistence was predicted to be a crucial factor in moderating students’ learning
outcomes. On the assumption that failure can signal an opportunity to learn, we
predicted that persistence after failure would be particularly instrumental in facilitating
learning.
Prior work by the author suggested that making a combination of internal and
external attributions for failure might help students persist. We designed an
intervention to invite students to attribute failure to both internal and external causes.
We call this an ego-protective buffer (EPB), because the external attributions are
meant to protect students’ egos from the negative psychological ramifications of
failure. However, we expected students to make some internal attributions as well,
which should help them take responsibility for remedying the failure situation. The
mixed attributions encouraged by an EPB are meant to increase persistence after
failure, which should, ultimately, enhance learning from the game. We also
speculated that an EPB might encourage more productive persistence, whereby
students would choose to engage in better learning strategies.
Review of empirical findings
There were two strands of analyses. One strand focused on the effects of the
EPB intervention, asking the following central research questions: (1) Does an EPB
promote persistence after failure? (2) Does persistence after failure influence learning?
(3) What is productive persistence after failure? (4) Does an ego-protective buffer
promote productive persistence?

133
A second strand of analyses explored the possibility of using students’ learning
choices to measure self-regulated learning and motivation. Here we focused on
behaviors related to persistence and other discrete learning choices in the game (i.e.
which learning resources students chose). In-game behaviors may assess constructs
that are not captured by traditional motivation or self-regulated learning measures but
which are, nonetheless, consequential for learning. Analyses focused on the following
exploratory research questions: (1) Do pre-existing individual differences predict
persistence behaviors? (2) Do persistence behaviors explain some variance in learning
that cannot be explained by pre-existing individual differences? (3) More generally,
which learning choices (beyond persistence) predict learning outcomes?
Below, we summarize the current findings around these research questions,
discuss theoretical and practical implications of the work, and propose future
directions for the research.
The effect of the ego-protective buffer on persistence behaviors and learning outcomes
A four-pronged analysis investigated the central hypotheses. Visiting the
hypotheses by partitioning the data in different ways helps to separate real effects
from “fluke” effects.
The first analysis explored treatment effects on learning, persistence behaviors,
and the relationship between persistence behaviors and learning. The results indicated
that a lack of persistence after failure (represented by the fail-abandon behavior) was
associated with lower learning gains for all subjects. Moreover, the association was
not just between persistence and learning, but persistence after failure specifically.
Persistence after success had no relation to learning gains. We interpret this to mean
that persistence after failure is critical for learning.
With respect to treatment, students in the Control condition, who did not have
access to an ego-protective buffer, were more likely to quit after failure and persist on
a level of the game where they experienced success. One interpretation of this result
is that without an ego-protective buffer, students tended to flee from past failures and
avoid future failures. In other words, they displayed less persistence after failure and

134
they made choices that reduced their risk of future failure. In contrast, students
provided with an EPB tended to quit at the same rates after both successes and
failures. EPB students behaved as if they were “buffered” from the negative
ramifications of failure. However, the higher rate of persistence after failure in the
EPB condition did not translate into overall learning differences by condition.
Students in the EPB and Control conditions made similar learning gains from pretest
to posttest. Given that the persistence after failure was a correlate of learning gains
across the full sample, and the EPB condition showed more persistence, this raised the
question of why there was not an overall learning advantage for the EPB condition.
Given that the ego-protective buffer was designed to protect students from the
negative psychological ramifications of failure, we speculated that the intervention
might have been most effective under conditions of high failure. So we examined
learning and behavioral outcomes for high- and low-failing students across both
conditions. High-failing students in the Control condition learned far less than their
low-failing counterparts. In contrast, high- and low-failing students in the EPB
condition learned the same amount. The ego-protective buffer did influence learning,
but only for those students who experienced a great deal of failure.
To explore the mechanism behind this effect, we examined persistence after
failure and success for the high- and low-failing students in each condition. Once
again, Control students tended to flee from failure but persist after success. This
pattern was exaggerated in the high-failing Control students. While this was only a
descriptive pattern, it offers some explanation for the learning effects. High-failing
Control students were less likely to persist after failure than their low-failing
counterparts, and so they learned less.
Given that the effect of the EPB was particularly strong for students who
experienced more failure, we conducted similar analyses on a within-subjects level, to
see whether all students would show similar effects when they encountered a high
failure situation. The within-subject results were parallel. The pattern of persistence
behaviors that occurred across conditions (i.e. Control students are more likely to flee
failure and persist after success) was particularly robust in high-failing situations.

135
However, the learning effects were weaker and non-significant. In other words, the
ego-protective buffer was more effective at increasing learning in high-failing students
than in high-failing situations.
To further isolate the significance of the response to failure, we examined
whether there were similar results when the data were partitioned by hard and easy
game levels. It may have been the case that the key variable was not failure per se,
but rather the challenge of the problem. For example, students with low prior
knowledge for a particular game level might have abandoned the level after
discovering how hard the game was. In this case, the effect would be based on the
experience of challenge, rather than the experience of failure. To find out, we did one
last analysis to compare students’ persistence and learning gains in situations of high
and low challenge, across conditions. High challenge situations were those game
levels for which students had done poorly on the pretest. We found no learning
differences across high and low challenges situations. However, we did find the same
pattern of persistence behaviors that occurred in previous analyses. Compared to EPB
students, Control students showed less persistence after failure and higher rates of
risk-averse choices in high challenge situations. However, these effects were
generally more modest than the effects gained by partitioning the data according to
failure rates.
Generalizing across these four analyses, which occurred at both person and
situation levels, and which examined learning across the entire game and learning on
specific game levels, we came to the following conclusions. The most robust finding,
which occurred either descriptively or significantly in every analysis, was the effect of
the EPB on behaviors in response to and in anticipation of failure. An ego-protective
buffer encouraged persistence following failure and risk-taking (i.e. EPB students are
more likely to try a different game level after success). We also found that the ego-
protective buffer had an impact on learning, particularly for high-failing students,
though the trends were the same for high-failing situations. Students who were not
provided an ego-protective buffer and who failed often learned far less than low-
failing students who were given the same buffer. An ego-protective buffer may not be

136
necessary for students who experience a small amount of failure. Perhaps low-failers
are more resilient to failure and do not need an external source of motivational
support.
Another interesting finding is that prior achievement and failure in the game
are marginally better predictors of learning in the Control condition than in the EPB
condition. This suggests that learning in the EPB group is divorced from prior
achievement; in a sense, the EPB manipulation has “leveled the playing field” for high
and low-achieving students. Also, learning in the EPB condition is less sensitive to
failure in the game; EPB students were more resistant to the effects of failure on
learning.
It is important to note that the effects of the ego-protective buffer with respect
to learning are relatively small compared to the effects of prior knowledge.
Persistence after failure accounts for about 4% of the variance in learning gain scores.
Plus, the effect of the EPB on the high-failing students versus the low-failing students
also explains 4% unique variance in learning gains. At the same time, 4% is worthy of
attention, especially when it comes to models of instruction that can reach millions of
children.
An exploration of productive persistence and treatment effects
When students do persist after failure, what kinds of behaviors do they engage
in, and which ones are productive for learning? The analyses in Chapter 5 were
designed to answer these questions, while investigating how productive persistence
might differ across conditions and students who experience more or less failure. (We
focused on high and low-failing students, rather than situations, because this was the
locale of the strongest effects in the prior analyses.) Persistence behaviors were broken
into two categories: playing the game again or checking a relevant resource. While we
had predicted that checking a resource would be productive, neither of these categories
of persistence was a significant predictor of learning gains. Only persistence after
failure itself, as indicated by not abandoning the level after failure, had a significant
impact on learning.

137
We also discovered that what students did when they persisted did not differ
between conditions or between the high- and low-failing students across conditions.
Nor did it have a differential effect on persistence type behaviors. So, while the EPB
does encourage high-failing students to persist after failure, it does not encourage any
particular type of persistence.
Additional analyses were conducted to examine the behaviors preceding
success and failure, however these will not be discussed, because the findings do not
shed light on the main research questions.
The effect of pre-existing individual differences on persistence and learning
A second line of analysis was focused on the more practical concern of
whether in-game behaviors could be used as measures of motivation or self-regulated
learning. One idea is that micro-behavioral measures may capture some aspects of
situational motivation that cannot be predicted by pre-existing differences in more
global, trait-focused scales of motivation. For instance, persistence after failure,
which was captured by the reciprocal behavior of leaving a game level after failing,
was correlated with learning gains. However, persistence after failure was not
predicted by any of the seven motivational survey measures that were given before the
treatment. The motivational scales were not capturing this persistence behavior, even
though many of these motivational constructs are associated with persistence after
failure. For example, intrinsic motivation, self-efficacy, and mastery motivation
theories claim that students high in each construct should be more likely to persist
after failure. The fact that these measures do not predict the fail-abandon behavior
shows that measures of actual behaviors can capture useful aspects of situational
motivation, like persistence after failure. Moreover, persistence in the face of failure
has consequences for learning. So in addition to measuring situational motivation, the
fail-abandon behavior captures behaviors that are indicative of learning outcomes.

138
Discrete choices in the game as predictors of behaviors and learning
The next analysis examined discrete choices in the game, in an effort to (1)
examine students’ self-regulated learning in an open-ended environment and (2)
explore whether students’ learning outcomes could be predicted by their behaviors in
the game. The proportion of in-game choices dedicated to each type of learning
activity is not significantly predictive of learning gains. However, the general trend is
that high resource use predicts low learning gains, even when failure and pretest
scores are partialled out. In contrast, high frequency of game play predicts high
learning gains. Also, time on task is one of the strongest predictors of learning gains.
Given that the resources were designed to teach the content covered in the
games, these results are fairly surprising. Perhaps other measures of resource use
would show a different relationship with learning. For instance, if instead of counting
resource “clicks,” we counted “meaningful clicks,” where students went to a resource
and spent a reasonable amount of time there, then perhaps resource use would
positively predict learning. Of course, it is possible that the resources simply did not
help students learn the complex genetics content and that, instead, students learned
more effectively through practice and trial and error (i.e. game play).
The analysis of discrete choices did give us some idea of how students regulate
their own learning in a choice-filled environment. In general, students spent
proportionately very small amounts of time on the resources that we would expect to
improve learning. On average, 6% of all choices were reading choices, and only 2%
of choices were deep-level explanations of the correct answers to a game. Similar to
findings from past research on help-seeking, students rarely sought help (in the form
of resources), and they were less likely to seek help that involved deep processing
(Aleven et al., 2003). It is somewhat surprising that students rarely chose to receive
an ‘explanation,’ which provided context-sensitive help for specific aspects of a game.
A priori, one would assume that these are the most pointed and efficient resources for
learning how to win a game. Thus, whatever the case about resource use, these
students did not seem particularly high on the metacognition needed to decide on the

139
best resources for their learning, which may help explain why persistence after failure,
rather than persistence with the use of a resource, predicted learning.
Our interpretation of the findings
With respect to the research questions around ego-protective buffers and their
impact on learning and behavior, many of the original hypotheses were either
supported or qualified. As predicted, the ego-protective buffer did encourage
persistence after failure. However, we did not predict that it would be exaggerated
under conditions of high failure nor that it would encourage risky behaviors.
We had original predicted that the ego-protective buffer group would learn
more than the Control group. Provision of an ego-protective buffer did lead to greater
learning gains, but only amongst high-failing students. The one hypothesis that was
clearly refuted is that an ego-protective does not encourage more productive
persistence, only more persistence overall.
What is the mechanism behind the ego-protective buffer? The idea for the
ego-protective buffer was originally borne from our belief that a combination of
internal and external attributions would enhance persistence after failure. The results
are consistent with the attribution-related theory that predicted them, but it is
impossible to link the results directly to attributions as the mechanism. The interview
data, which we have not presented as part of the thesis, focused on attributions for
winning or losing a game and may provide more direct evidence. In future research, it
would be wise to embed attribution-related, Likert scale survey measures within the
game, to get reliable, situation-focused attributions in response to success and failure
in the game, without having to code verbal data.
Alternative interpretations
Beyond our attribution-based theory, there are certainly alternative
interpretations of the results and the mechanisms at work behind them. For instance,
one slightly alternative explanation is that students become high-failers precisely
because they abandon. In this scenario, it is not students’ response to high failure that

140
drives the learning effects. Rather, it is their, perhaps pre-existing tendency to not
persist that causes them to experience high failure. In general, this is one of the
problems of correlational data; it is impossible to determine which is the cause and
which is the effect. In any case, this alternative explanation is not completely at odds
with the attribution theory explanation, it just changes the story a bit. Instead of high
failure being a cause of fail-abandon, fail-abandon is a cause of high failure.
An alternative interpretation is that students’ behavior and learning in the EPB
condition is better explained by the nature of gambling than by attribution theory. For
instance, the element of chance in the game may lead students to view it as a gambling
type activity. In the EPB condition, where students believe it is possible to win with
only one correct answer in a game, students may be more willing to try games they
have previously failed because there is a chance they could win. Likewise, they may
be more willing to risk a different level of the game, even when they have found a
level where they can succeed, because their odds of winning a new game are based on
chance. However, it is unclear why high-failing students would buy more into this
gambling idea in the EPB condition. So this explanation does not hold up under closer
scrutiny.
The most plausible alternative explanation is that the Control condition has
been primed to adopt a performance-avoid goal. By providing them with the 75% rule
for winning, we have essentially given the Control group a concrete standard to shoot
for – a goal for their performance. In addition, the game provides rewards (points)
when students meet the 75% standard and punishes (takes away a “life”) when
students do not. This environment contains strong negative consequences for losing a
game, which may have primed students in the Control condition to adopt a
performance-avoid orientation. (In contrast, the EPB group did not have a fixed
performance goal, because of the chance element.) Students who adopt performance
avoid goals often persist less after failure and choose less challenging tasks. However,
these behavioral effects usually appear in challenging situations, such as high failure.
This could explain why the high-failing Control students persisted less after failure
and ultimately, learned less. In this scenario, the EPB condition does not have a buffer

141
to protect them from failure, but rather, they do not have a clear performance goal.
However, if this were true, we would expect the performance-avoid survey measures
to correlate positively with fail-abandon behaviors, particularly in the EPB condition,
but this was not the case. So this explanation does not adequately fit the findings.
This chapter reviewed the main findings, our basic interpretation of them, and
presented some alternative hypotheses. The next chapter explores the broader
implications of this work and future directions.

142
CHAPTER 9: RELFECTIONS, IMPLICATIONS, AND FUTURE
DIRECTIONS
This research begins to explore motivational supports for learning from failure
situations. Failure often presents a valuable learning opportunity, and in fact, many
instructional models have capitalized upon it. However, in order to learn from their
mistakes, students may need motivational scaffolds to protect them from the negative
psychological ramifications of failure.
This work explored the effectiveness of a motivation-based intervention called
an ego-protective buffer, that was designed to enhance persistence after failure. An
ego-protective buffer shields one’s sense of competence from the negative
ramifications of failure. The particular kind of EPB tested in this study was designed
to work by eliciting a combination of internal and external attributions for failure.
External attributions protect one’s sense of competence by averting the blame for
failure away from the self. This should discourage one from quitting the task. At the
same time, this ego-protective buffer invites some internal attributions, which
encourages students to take some responsibility for remedying the failure situation.
Based on this theory, we embedded an EPB into the rule structure of a game-
like learning environment. In the EPB condition, students were told that winning in
the game was a probabilistic outcome, dependent on a combination of chance and skill
on the part of the students. In the Control condition, students were told that winning
in the game was a deterministic outcome, dependent on students’ skill only. The EPB
did have an effect on learning, but only amongst high-failing students. High-failing
EPB students learned just as much as their low-failing counterparts. This was not so
in the Control condition, where high-failing students learned far less than their low-
failing counterparts. So the high-failing EPB group was behaving as if they were
“buffered” from the effects of failure. We also found evidence of a possible
mechanism behind this learning effect, though the exact connection between behaviors
and learning outcomes is not clear. In the high-failing EPB condition, students were

143
equally likely to persist after success and failure, while in the Control condition,
students were far more likely to persist after success. This was a descriptive
difference that occurred more strongly within subjects in high failure situations.
Finally, persistence after failure was associated with learning across the full sample of
subjects, suggesting that regardless of condition or failure rate, students who persisted
more after failure also learned more.
This study adds to the growing body of evidence in support of the persistence-
provoking and learning-boosting effects of ego-protective buffers that invite internal-
external attributions. Three sets of studies – the Teachable Agent (TA) studies, the
expert study, and the dissertation study – all set in drastically different settings, with
different types of failure, and different age groups – have shown the same result: an
ego-protective buffer is associated with greater persistence after failure. Since these
three studies all took place in drastically different contexts, they attest to the generality
of this type of internal-external EPB. In the TA studies, students were led to believe
they were teaching a digital pupil, which invited them to place some of the blame for
failure on their tutees. In the expert study, experts failing on a task in their domain of
expertise spontaneously attributed failure both to themselves and to the environment.
In the dissertation study, students believed that winning in the game was due to a
combination of skill and chance. Each of these studies contains a different
instantiation of the EPB, and yet the results are fairly consistent. Taken as a whole,
these studies provide compelling evidence that the EPB is a useful motivational
support that does enhance persistence.
The dissertation study attempted to isolate the effect of the EPB and test its
effectiveness in a new context and with a new implementation (chance-based).
Unfortunately, the attributions students made towards failure in the game were not
analyzed, so we cannot claim that the designed ego-protective buffer successfully
elicited mixed attributions for failure. However, we did find that the intervention
evoked persistence after failure and encouraged more risk-taking, particularly under
conditions of high failure. And both the current study and the pilot study showed that
persistence after failure is critical for learning.

144
The next section discusses some reflections on the game context in which the
study is set and the use of chance as an external cause of a failure outcome. Then, the
work’s many implications for theory-building, the design of instruction, and the
design of behavioral learning measures will be discussed. Finally, the remainder of
this chapter will explore potential future directions.
Reflections
The game context
Because the study took place in the context of a game rather than a more
realistic school learning activity, it must be acknowledged that the effects might be
unique to the game context. For instance, if the same study were done in the context
of taking a test, where students often attribute the outcome to ability, students might
be far less likely to make external attributions to chance, and hence, the effect of the
EPB on persistence could be lessened. In general, caution must be used when
interpreting the results, since these findings may not generalize beyond the context of
this particular genetics game.
However, the game context could also be dampening the effects. An ego-
protective buffer is probably most necessary when students are highly ego-involved in
the task. That is, the ego needs to stand a chance of being boosted or hurt by the
outcome for students to become ego-invested. A game is low stakes; since it is not
impacting students’ grades, loss of the game could easily be shrugged off as “no big
deal.” Whereas, had the failure been more consequential, where it affected students’
grades or somehow had the potential of affecting one’s ego in a more demonstrative
way, the effect of the ego-protective buffer might have been even more pronounced.
Another alternative would be to make students more ego-invested in the game
itself by making the game more like real life. Currencies instead of points, real-world
tasks instead of alien puzzles, and interaction with other students in the game might
have served to make the game more realistic. If students had cared more about how
they performed in the game, they might have had a greater need for an EPB.

145
The game context could be an interesting place to house an assessment. The
data described in this dissertation show that behaviors engaged in during game play do
predict learning outcomes. Failure rate in the game itself is also an excellent predictor
of learning. These data suggest that performance and behaviors in the game can
forecast performance on a paper-and-pencil test. However, it is possible that if we
told students they were being assessed in the game that they would behave or perform
differently. This would be an interesting study to conduct. In one condition, students
could be told that they are playing a game, while in another condition, they are told
they are taking a test. Behaviors would undoubtedly change but the same types of
behaviors may still be predictive of learning, in both contexts. If behaviors in the
game turned out to be fairly good predictors of student performance on more standard
assessments, then educational games could be a relatively stress-free way to assess
students’ knowledge.
Attributions to chance
This study’s particular instantiation of the EPB used chance as an external
cause for the outcome. However, many other types of external causes could be used.
For instance, the Teachable Agent studies used another person (the agent) as the
external cause. A common external attribution for performance in school contexts is
the difficulty of the task. Chance has particular properties that make it different from
other kinds of external attributions. Chance is both uncontrollable and changeable.
While almost all external attributions are uncontrollable by definition, one’s
luck can change. The possibility of change could provide some hope that things will
get better, if students try again. This could explain why the EPB affected persistence
in this study but not productive persistence. It makes sense that the chance outcome
would not encourage more productive persistence, since it does not point to effort or
strategy as a source for the failure outcome. Whereas, if students believed that the
outcome was malleable and might change by chance, they might have been driven to
persist by simply trying again, without taking up more productive learning actions.

146
Are attributions to chance healthy for students? Most attribution researchers
argue that effort is the healthiest attribution to make because it makes the student
responsible for remedying the outcome and encourages persistence at the task.
However, there are times when the outcome is partially due to chance, and in those
cases, it might be better for students to understand that a failure is not totally their
fault. For instance, when graduate students submit a paper for publication, the
reception of their paper partially depends on the particular reviewers who are chosen
to assess the paper’s readiness for publication. In that sense, there is an element of
luck involved in whether the paper is rejected or accepted. Other outcomes, like
scientific experiments are also influenced by random variation. In these examples,
making a failure attribution to effort alone could bruise a student’s ego, so partial
attributions to chance are warranted.
Attributing failure to chance alone (or any external cause) would be an
unhealthy attribution to make in a school context, since it gives no responsibility to the
student. For instance, learned helpless individuals often perceive that external,
uncontrollable factors (like chance) have a strong impact on their performance, and
they display extremely negative learning behaviors (Diener & Dweck, 1978). Thus, it
is important that students make only partial attributions to chance. Making some
attributions to internal causes (like effort or knowledge) is critical for persistence. The
internal-external EPB thrives on this balance.
Implications
Implications for theory-building
This dissertation study had the potential to contribute to three pieces of theory
related to the ego-protective buffer concept: the mechanisms behind the effect, the
conditions under which the EPB is effective, and a more precise understanding of the
behavioral outcomes. With respect to mechanisms, we originally proposed that the
EPB used in this study would elicit a combination of internal and external attributions.
By simultaneously shielding students from negative self-blame and encouraging them
to take responsibility for remedying the failure, mixed attributions would enhance

147
persistence after failure. This is a plausible story, but without attributional data, it is
impossible to provide support for this hypothesis. However, there are two pieces of
indirect evidence that make the attribution theory seem probable. First, two other
studies which also contained situations where the ownership of outcomes was
ambiguous – the TA study and the expert study -- demonstrated that a combination of
internal and external attributions coincided with greater persistence after failure.
Second, all the predictions that were derived from the attribution-based theory of the
EPB were either directly supported or mildly qualified by the dissertation study’s
findings. Looking at the evidence as a whole, it is surely feasible that the type of EPB
tested here supports persistence by encouraging blended attributions for failure.
If we assume that the EPB did work as intended, then this dissertation study
further refines the conditions under which the EPB works. We originally predicted
that all students would benefit from the support of an EPB, but in this study, the
internal-external EPB was most effective under conditions of high failure. High
failing students showed the strongest learning effects from the EPB, while students in
high failure situations showed stronger persistence effects from the EPB. These
effects need to be teased apart. Do high-failing students always persist less in failure
situations? Are they more prone to engage in fail-abandon behaviors and thus, stand
to benefit more from the support of an EPB? Or do high-failing students have some
other trait, like low motivation, that is causing them to benefit more from the EPB?
To explore this alternative interpretation in the current data set, we could test this by
comparing students with high and low motivation (based on a composite of pre-survey
measures) and determine whether they show the same pattern of persistence and
learning as high and low-failing students. To do a more controlled study that would
test the effects of high-failing students against high-failure situations, we could split
students into groups of high and low-failing students based on one session of game
play (with no EPB). Each of those groups of students could then be exposed to high
or low failure situations (25% vs. 75% failure) in the game, with and without access to
an EPB. The resultant patterns of persistence behaviors and learning outcomes in each
group might help tease apart the effect of failure on the effectiveness of the EPB.

148
Another interesting question raised by the dissertation study is whether certain
external attribution types are more effective at promoting persistence after failure. In
this dissertation study, the internal-external EPB provided to students was designed to
invite partial external attributions to chance. In the TA study, students were invited to
make external attributions to another person (the Teachable Agent character). How
does blaming failure on chance differ from blaming another person? Without the
attributional data, we can only speculate.
However, children should have an easier time reasoning about less abstract
external causes, such as the actions of another person, while probabilistic or chance-
influenced outcomes are more difficult to conceptualize, even for adults (Nisbett,
1987). This might explain why the between-condition learning effects were stronger
in the TA study than in the dissertation study. Perhaps an EPB that provides more
concrete external causes for outcomes can support all individuals and not just the high-
failing ones. A simple experiment could test this by contrasting an abstract and a
concrete cause of failure (e.g. the weather vs. chaos theory) embedded in an EPB.
This work also further refines the behavioral outcomes of an EPB. Though we
had originally predicted the EPB would enhance persistence after failure, this was only
one of the positive impacts it had on students’ behavior in this study. The EPB also
discouraged risk-avoidance behaviors by moving students away from “safe” choices
that would prove their competencies rather than grow them, particularly under
conditions of high failure. This may be unique to EPBs that use chance as an unstable
external attribution. If there is always a chance that students can do well, they might
be more willing to take that chance. Whereas, if the external attribution were to the
difficulty of the subject, which is a stable, external cause, the risk-taking effect might
disappear. This could be tested in a study with two comparable EPBs, which
encouraged external attributions to either stable or unstable causes.
A related possibility is that the internal-external EPB, which was designed to
affect students’ perception of and response to failure, could also be altering students’
perception and response to success. Are combined internal and external attributions to
success a good thing? Some researchers argue that attributing success to the self is a

149
healthy behavior that builds self-efficacy and a sense of competence (Schunk, Pintrich,
& Meece, 2008). Does attributing part of that success to an external cause mitigate
this effect? Or are students so unlikely to make attributions for success that the EPB
would have no impact on self-efficacy? This is an empirical question that remains to
be explored. In this study, post-survey data showed that EPB and Control students
had similar levels of self-efficacy for the game, suggesting that combined attributions
to success did not impact students’ sense of competence at the task. Future analyses
of the interview data could shed light on the types of attributions students make for
success.
In sum, this study contributed to our understanding of the conditions under
which this type of internal-external EPB is effective, it found new behavioral
outcomes of this EPB, and it raised the possibility of several new research directions.
More empirical work and analyses of the current data will begin to scratch the surface
of these theoretical questions.
Implications for instruction
Three studies have now shown that situations which contain an internal-
external EPB are in some way associated with greater persistence after failure. And
two studies have demonstrated a clear link between persistence after failure and
learning. This evidence suggests that the internal-external EPB has potential as an
instructional support that could enhance persistence and learning, particularly under
conditions of high failure.
What are possible instantiations of an EPB? There are two ways to provide an
EPB. The first is to build an EPB into the learning environment. Examples already
discussed include the Teachable Agent online learning environment, where students
can partially blame failure on the agent they are programming, and the genetics game
in the dissertation study, where students believed that outcomes were partially due to
chance. Other common educational practices have built-in internal-external EPBs,
like peer tutoring, collaboration, and educational games. In each of these instructional
situations, responsibility for failure can be distributed across the self and an external

150
cause. This might help explain why these instructional methods are believed to be
effective for motivation and learning.
What other ways could internal-external EPBs be built into the structure of a
learning activity? Computer-based learning environments might trigger EPB-like
attributions for failure, when a high degree of failure is detected. For instance, in a
math-based learning environment, if a student is failing more than 50% of the
problems, this could prompt an on-screen character to make failure attributions to a
combination of internal causes (student effort or strategy) and external causes (like the
difficulty of the task).
In addition to environmentally-based EPBs, students might be able learn to
self-generate an ego-protective buffer under conditions of high failure. In the expert
study, the experts made a combination of internal and external attributions for failure
during the task in their domain. But during the task outside their domain, they made
largely internal attributions. Other research has shown that experts have an excellent
understanding of how external conditions affect their performance (Ericsson, 2002).
For instance, expert tennis players are constantly aware of wind conditions, which
they practice adapting to. One possibility is that experts are able to generate external
attributions for failure because they have developed the ability to perceive the external
conditions that affect their performance in their domain of expertise. In addition to
noticing external causes, the experts in this study also worked around or changed the
external conditions that were hindering their performance (e.g. by eliminating time
constraints, consulting resources, etc.) in order to succeed. This might be a worthy
goal for students to reach.
One possible intervention that might help students notice external causes is to
ask students to reflect on a negative outcome. Students could list all the possible
reasons for the negative outcome, both internal and external. It may also be
productive to have students brainstorm and discuss ways they could adapt to or
prepare for external causes for negative outcomes. The focus of the intervention
would be to help students to (1) learn to recognize when and how external conditions
are affecting their performance and (2) learn how to adapt to these external

151
circumstances. Of course, this intervention (and variants of it that do/do not include
factors 1 and 2) could be tested in the classroom.
These interventions are speculative and need empirical evidence before they
can be unleashed on the classroom. In particular, clear evidence of the attributional
mechanism behind the internal-external EPB is important for designing instruction
that buffers the effects of failure or teaches students to create their own buffers.
Implications for measurement
This study, along with the pilot study that preceded it, provides an existence
proof for the possibilities of behavioral-based measures of learning process and
motivational behaviors. The “fail-abandon” behavior captured in the dissertation study
is a measure of persistence after failure, which is often a behavioral outcome of
motivation. While many different motivational constructs should promote persistence
after failure, in the dissertation study, motivational constructs did not predict
persistence. Behaviors like fail-abandon provide information about motivated
behaviors that (1) are not necessarily captured by survey measures of motivation, (2)
may provide more situational measures of motivation that are more predictive of
learning than global, trait-like measures of motivation, and (3) can be changed by
interventions.
The current research points to the value of capturing motivational behaviors
(like persistence or risk-taking) which occur during the learning activity. Even though
we may not know what motivational construct caused these outcomes, they may still
be worth measuring if they help us predict learning. Moreover, functional measures of
learning behaviors also describe the process of learning. Process data often points out
possible mechanisms or raises new questions about the theory behind the research.
Moreover, having good measures of learning behaviors, particularly ones that
are changeable via interventions, could be very useful in the development of adaptable
learning environments. Computer-based data mining techniques are becoming
increasingly more sophisticated, and it is now possible to collect and process students’
behavioral “clickstream” in real time. For instance, an adaptable learning environment

152
could detect when a student is failing and abandoning too frequently and intervene
with an EPB in the middle of the learning activity. Adaptable learning environments
have enormous potential to impact learning, but to intervene in refined ways, we must
be able to identify and measure healthy and unhealthy learning behaviors. This
dissertation research takes us one step closer in the direction of creating measurements
of critical behaviors that relate to learning and motivation.
Future Directions
This body of work raises a number of questions that suggest three different
lines of future work. The first line of research could shore up several theoretical
claims about the mechanisms behind the internal-external EPB and the importance of
persistence after failure for learning. A second line of work could follow up on the
possibilities of creating computer-based measures of learning and motivational
behaviors. Finally, a third direction would explore the idea of promoting productive
persistence after failure.
Confirm theoretical claims
Three pieces of the theoretical story behind the EPB need better evidence.
First, we need to know whether an internal-external EPB provided to a student during
learning actually does elicit a combination of internal and external attributions.
Second, we need more definitive evidence that a combination of internal and external
attributions can spur persistence. Finally, we need to test the effect of fail-abandon on
learning more directly.
To get at the first link in the chain of reasoning about the internal-external
EPB, there are several possible approaches. One is to code and analyze the interview
data from the current study, to determine whether students given access to an ego-
protective buffer make a combination of internal and external attributions, as
predicted. A second approach is to run another study, this time embedding survey
measures of attributions in the task. For instance, if we were to run the same study
again, survey items could occasionally appear on-screen following success and failure

153
in the game. Survey items add precision to the measure of attributions because they
can get at more specific attributions like fixed intelligence or long-term effort. These
may not be easily identified in verbal data, when kids are wont to make ambiguous
attributions like “I don’t get this” or “I didn’t read the right thing”.
To gather stronger evidence for the claim that combined internal-external
attributions scaffold persistence, a simple study would make the attributions directly
for the students. For instance, students could use the same genetics game, only each
time they won or lost a game, a message would appear on-screen making either an
internal (“Try harder next time.”), external (“This task was really hard.”), or a
combined internal-external attribution (“This task was really hard. Try harder next
time). This could also be implemented in a lab-like setting where an experimenter
verbally states the attribution while students work on math problems, for instance. In
any case, we would expect the combined attribution condition to show the greatest
persistence after failure.
In the dissertation study, we established a correlational link between fail-
abandon behaviors and learning. Any number of other person-level variables that we
did not measure in the study could be co-occurring with fail-abandon, which casts
doubt on fail-abandon as the cause of learning gains. To more carefully establish this
link, we could do a simple study where one group is forced to abandon after every
failure, another group is forced to play again after every failure, and yet another group
is forced to check a resource after every failure. If the fail-play-again and fail-
resource groups make greater learning gains than the fail-abandon group, then we
would have more definitive evidence of fail-abandon’s effect on learning. Moreover,
it would be interesting to see how the fail-resource group fares, given that we expected
them to make the greatest learning gains, but in the current study the fail-resource
behavior does not correlate with learning, and more generally, resource use tends to be
a negative predictor of learning.
These three experiments would provide strict tests of the claims behind the
mechanisms by which the internal-external EPB works and the link between failure
and learning.

154
Measurement of learning and motivational behaviors
One of the limitations of the dissertation study is the lack of constraints in the
design of the environment and behavioral measures. In our zeal to provide students
with the utmost choice and control in their learning, we created a noisy data collection
environment with many uninterpretable sequences of learning choices. To get cleaner
measures of specific types of learning and motivational behaviors, it would be better
to clearly define the behaviors we want to measure and the conditions under which
they are likely to be elicited, a priori. For instance, if we were interested in capturing
functional measures of motivation, we might first create a list of broad behavioral
constructs like persistence, risk-taking, or risk-avoidance, and then operationalize
them as specific behaviors in the context of the learning task and environment.
Similarly, the task should be designed to elicit these behaviors, and even better, we
should have strong hypotheses about how exactly these behaviors will affect learning.
Starting with a strong theoretical model, well-defined hypotheses, clear
operationalizations of behavioral constructs, and an environment designed to measure
them would, hopefully, increase our chances of building effective, computer-based
measures of meaningful process data. Having clear hypotheses and measures would
guide us in finding meaningful sequences of behaviors that are likely to correlate with
learning or motivation.
A second limitation of the dissertation study is that the measures of behavior
are very simplistic. Simple two-event sequences provide a very limited snapshot of
the learning behaviors students engage in. For instance, when a student leaves a level
after failing, this is classified as a fail-abandon behavior, but that student may come
back much later in the sequence. Developing and applying more sophisticated data
mining procedures to the current data set would allow us to capture a whole host of
more complex learning behaviors (like eventually revisiting a game level) that are
more indicative of students’ strategies and self-regulated learning.
Another interesting avenue to pursue is to classify students (rather than their
behaviors) into types. For instance, perusal of the data revealed broad three categories
of game starters. There are explorers, who preview several levels before settling down

155
and playing one. There are researchers, who read and view other resources before
attempting to play a game. And, there are gunners, who jump right into playing a
game, without any preparation or deliberation. It is possible that these different
learner types have very different learning outcomes or different responses to failure.
Initial analyses could be done with the current data set, however, this would require
more sophisticated data mining techniques.
Exploring triggers of productive persistence
Unfortunately, the current study proved to be uninformative with respect to the
idea of productive persistence. The internal-external EPB affected persistence after
failure but not any particular type of persistence. Moreover, the instrumental behavior
in this study was persistence alone; the type of persistence (at least based on the
current measures) did not have an effect on learning. However, there are certainly
situations where persistence alone is not enough and perseverating strategies do not
work. How can we motivate students to embark on a path of productive persistence?
The current study offers little help in this regard, but prior work with the Teachable
Agents (TA) provides some suggestions for future work. In the TA study, one group
was learning in order to teach their agents, while another group was learning for
themselves, with identical software. The TA students spent far more time on learning
activities, while the Self group squandered their time on game play and chat.
Moreover, the TA group engaged in behaviors (map-building) that we know are
productive for learning in that environment. We speculate that students in the TA
group engaged in productive persistence because they felt a sense of social
responsibility towards their tutees. For example, when the TA fails in the game show,
students engage in many effective learning strategies to remediate their TA’s
knowledge. Whereas, when the students themselves get questions wrong in the game
show (in the Self condition), they do not engage in such effective learning strategies,
and they ultimately learn less.
This explanation assumes that students know the learning strategies and tactics
that are going to be effective, but they choose when to implement them. Beyond

156
Teachable Agents, how can we harness a sense of social responsibility to encourage
productive persistence in students, particularly after failure? Do students know what
productive persistence is or do they lack the SRL and metacognitive knowledge?
It might be interesting to explore these questions in our dream computer-based
learning environment, one where we knew exactly what constitutes productive
persistence. There would be three conditions. In one condition, students would be
given a social responsibility manipulation. They are told that each time they lose a
game, they will lose a “crew member” from their ship, and they can win crew
members back by winning a game. In another condition, students would simply be
told a good SRL strategy that constitutes productive persistence. A third condition
could be given both manipulations. This might begin to answer the question of
whether students need metacognitive guidance to engage in these strategies and
whether this particular instantiation of a sense of responsibility could trigger more
productive persistence.
Conclusion
Providing students with an ego-protective buffer by inviting them to make a
combination of internal and external attributions for failure was a productive
intervention in the context of an educational game. This work has interesting
implications for building a theory of the ego-protective buffer, designing educational
interventions that will help students deal with failure in productive ways, and creating
new measures of functional behaviors. However, more research must be done to fully
understand the phenomenon. This work has raised many interesting questions for
future study in the areas of productive persistence, behavioral measures of motivation
and learning, and the mechanisms by which an internal-external EPB affects
persistence.

157
APPENDIX
Contents of Appendix materials
A. Pretest
B. Posttest
C. Presurveys
D. Postsurvey
E. Example puzzle for each topic
F. Example set of resources for Family Tree topic

158
Appendix A: Pretest
Please work alone and try hard. If you don’t know the answer to a question, give your best guess. Good luck! 1. Have you ever noticed that some people have dimples when they smile?
The gene for dimples has two forms or alleles:
• D = dominant allele for dimples • d = recessive allele for no dimples
(1a) Two dimpled parents have children. Fill in the Punnett square below to show the possible sets of alleles their children could inherit.
Parent 1
D d
D Parent 2
D
(1b) In the Punnett square above, circle the children that will have dimples.

159
2. There are three basic hair types: straight, wavy, and curly. The gene for hair type has two co-dominant alleles: S = co-dominant allele for straight hair C = co-dominant allele for curly hair (2a) Write in the hair type (straight, wavy, or curly) for each missing individual from this family tree. (2b) When you see “probability?”, write in the chances that a child of this hair type would be born from its parents. (Hint: probability is a number.)

160
3. What is the probability that two Dd parents would have….
(3a) a child with genotype DD? _________
(3b) a child with genotype Dd? _________
(3c) a child with genotype dd? _________
(3d) a child with dimples? _________
(3e) a child with no dimples? _________ 4. The family tree below shows the inheritance of two separate traits: hair type and dimples. For each missing individual from this family tree…
(4a) Write in its hair type (straight, wavy, or curly) (4b) Write in its dimple genotype (DD, Dd, or dd) (4c) When you see “probability?” write in the chances that this type of child would be born to its parents.

161
5. A Dd parent and a dd parent plan to have 12 children. (5a) How many DD children would you expect them to have? _________ (5b) How many Dd children would you expect them to have? _________ (5c) How many dd children would you expect them to have? _________ (5d) A DIFFERENT SET of parents has 5 children. All the children are genotype Dd. Predict the most likely genotypes of these parents.
Parent 1 genotype ________ Parent 2 genotype ________ (5e) There are OTHER sets of parents that could have 5 Dd children, though it would be less likely. What is one possible set? (It’s OK to use one of the parents from 5d).
Parent 1 genotype ________ Parent 2 genotype ________ 6. The gene for dimples comes in two forms:
D = dominant allele for dimples d = recessive allele for no dimples
The gene for hair type comes in two co-dominant forms:
S = co-dominant allele for straight hair C = co-dominant allele for curly hair
Suppose the following two parents plan to have children: DdSC and DDSC. (6a) Fill in the Punnett square below to show the possible sets of alleles these parents could pass on to their children. DS dS DC dC
DS
DC
(6b) In the Punnett square above, circle the children that would have both dimples and wavy hair.

162
(6c) What is the probability that these parents would have a DDSC child? ___________ (6d) What is the probability that these parents would have a DdCC child? ___________ 7. The family tree below traces the inheritance of dimples. (7a) Write in the genotype (DD, Dd, or dd) for each missing individual in this family tree. (7b) When you see “probability?”, write in the chances that this type of child would be born from its parents. (Hint: probability is a number.)

163
Appendix B: Post-test
Please work alone and try hard. If you don’t know the answer to a question, give your best guess. Good luck! 1. Some lizards have different coat patterns.
The gene for coat pattern has two forms or alleles:
• R = dominant allele for spotted coat • r = recessive allele for plain coat
(1a) Two spotted lizard parents have children. Fill in the Punnett square below to show the possible sets of alleles their children could inherit.
Parent 1
R r
R Parent 2
r
(1b) In the Punnett square above, circle the children that will have spotted coats.

164
2. There are three lizard tail lengths: short, medium, and long. The gene for tail length has two co-dominant alleles: L = co-dominant allele for long tail S = co-dominant allele for short tail (2a) Write in the tail type (short, medium, or long) for each missing individual from this family tree. (2b) When you see “probability?”, write in the chances that a child of this tail type would be born from its parents. (Hint: probability is a number.)

165
3. What is the probability that two Rr parents would have….
(3a) a child with genotype RR? _________
(3b) a child with genotype Rr? _________
(3c) a child with genotype rr? _________
(3d) a child with a spotted coat? _________
(3e) a child with a plain coat? _________ 4. The family tree below shows the inheritance of two separate traits: tail type and coat pattern. For each missing individual from this family tree…
(4a) Write in its tail type (short, medium, or long) (4b) Write in its coat pattern genotype (RR, Rr, or rr) (4c) When you see “probability?” write in the chances that this type of child would be born to its parents.

166
5. An Rr parent and an rr parent plan to have 12 children. (5a) How many RR children would you expect them to have? _________ (5b) How many Rr children would you expect them to have? _________ (5c) How many rr children would you expect them to have? _________ (5d) A DIFFERENT SET of parents has 5 children. All the children are genotype Rr. Predict the most likely genotypes of these parents.
Parent 1 genotype ________ Parent 2 genotype ________ (5e) There are OTHER sets of parents that could have 5 Rr children, though it would be less likely. What is one possible set? (It’s OK to use one of the parents from 5d).
Parent 1 genotype ________ Parent 2 genotype ________ 6. The gene for coat pattern comes in two forms:
R = dominant allele for spotted coat r = recessive allele for plain coat
The gene for tail type comes in two co-dominant forms:
L = co-dominant allele for long tail S = co-dominant allele for short tail
Suppose the following two parents plan to have children: RrLS and RRLS. (6a) Fill in the Punnett square below to show the possible sets of alleles these parents could pass on to their children. RL rL RS rS
RL
RS
(6b) In the Punnett square above, circle the children that would have both spots and medium tails.

167
(6c) What is the probability that these parents would have a RRLS child? ___________ (6d) What is the probability that these parents would have a RrSS child? ___________ 7. The family tree below traces the inheritance of coat pattern. (7a) Write in the genotype (RR, Rr, or rr) for each missing individual in this family tree. (7b) When you see “probability?”, write in the chances that this type of child would be born from its parents. (Hint: probability is a number.)

168
8. Ms. Schmidt is holding two raffles: one for a cupcake and one for a cookie. Students have purchased tickets for these raffles. Ms. Schmidt puts the raffle tickets into 2 separate bowls. She stirs up the tickets and picks one winner from each bowl. What is the probability that Sarah will win both the cupcake and the cookie? Show your work. 9. In sorghum plants, red stem is dominant over green stem.
• R=dominantalleleforredstem• r=recessivealleleforgreenstem
1,000 seeds from 2 parent sorghum plants grow to become 759 red-stemmed plants and 241 green-stemmed plants. Which genotypes are the plant parents most likely to have? Explain why. 10. The alleles for fish egg coat are:
• T = dominant allele for thin egg coat • t = recessive allele for thick egg coat
Raffle tickets

169
A rare breed of fish cannot be born with two recessive alleles for thick egg coat. A pair of recessive egg coat alleles is deadly because it prevents the fish from hatching from its egg. (10a) Fill in the Punnett square below to show all the possible sets of alleles that 2 parent Tt fish could pass on to their children.
T t
T
t
(10b) In the Punnett square above, circle the genotype(s) that cannot be born. (10c) What is the probability that a TT fish will be born to 2 Tt parents? 11. Your friend plays a card game called Stanford solitaire. There are 4 kinds of Stanford solitaire cards:
You watch your friend play the game and try to figure out the rules. Here’s what she does:
1. At the beginning of each round, she deals herself four cards and places them in two different groups, face down on the table. She does not look at the cards.
2. She randomly picks one card from each group and places each one face up on
the table. These cards are called the “pair.”

170
3. She calls the round a “win” or a “loss”. Below are some winning and losing pairs.
(11a) What is the rule for winning a round? What kind of pair wins a round?
(11b) What is the rule for losing a round? What kind of pair loses a round?

171
(11c) Which of the following group cards would have the greatest chances of producing a win?
a.
b.
c.
d. Options (a) and (c) have the same chance. e. Options (a) and (b) have the same chance.

172
Appendix C: Pre-surveys
Motivational Constructs
Tell us how much you agree with the following sentences by circling one number for each. Please give us your honest opinion for each statement. There are no right or wrong answers, and your teacher will not see them.
Stro
ngly
D
isag
ree
Dis
agre
e
Neu
tral
Agr
ee
Stro
ngly
A
gree
1. An important reason I do my science work is because I like to learn new things. 1 2 3 4 5
2. What I learn in my science class is interesting. 1 2 3 4 5
3. If I could choose an easy or hard science assignment, I would choose an easy one. 1 2 3 4 5
4. I am certain I can figure out how to do difficult work in science. 1 2 3 4 5
5. I like the work in my science class best when it really makes me think. 1 2 3 4 5
6. I would feel successful in science if I got better grades than most of the other students. 1 2 3 4 5
7. How well I do in science depends on how smart I was when I was born. 1 2 3 4 5
8. I enjoy the activities in my science class. 1 2 3 4 5
9. I can do almost all the work in science class if I do not give up. 1 2 3 4 5
10. I have to be really smart to do well in science.
11. I want to do better than other students in my science class. 1 2 3 4 5
12. An important reason I do my science work is so other students won’t think I’m stupid. 1 2 3 4 5
13. I like science work that I will learn from even if it is hard to learn at first. 1 2 3 4 5
14. If I have enough time, I can do a good job on all my science work. 1 2 3 4 5
15. It is important to me that the other students in my 1 2 3 4 5

173
Stro
ngly
D
isag
ree
Dis
agre
e
Neu
tral
Agr
ee
Stro
ngly
A
gree
science class think I am smart.
16. I find science interesting. 1 2 3 4 5
17. It is very important to me that I do not look stupid in my science class. 1 2 3 4 5
18. I feel most successful in science class when I learn something I didn’t know before. 1 2 3 4 5
19. I am certain I can master the skills taught in science class this year. 1 2 3 4 5
20. I don’t like doing difficult science work because I might fail. 1 2 3 4 5
21. I can’t change how smart I am in science 1 2 3 4 5
22. I like learning about science concepts. 1 2 3 4 5
23. I like to do science work that lets me show how smart I am. 1 2 3 4 5
Thank you very much!

174
Self-regulated learning skills survey
Instructions: Please circle the number that best describes what you think about each sentence.
Not
at a
ll tru
e So
mew
hat
true
Ver
y tru
e
24. I ask myself questions to make sure I know the science material I have been studying. 1 2 3 4 5 6 7
25. When I study for a science test, I try to put together the information from class and from the book.
1 2 3 4 5 6 7
26. I work on practice science exercises and answer end of chapter questions even when I don’t have to.
1 2 3 4 5 6 7
27. When I do science homework, I try to remember what the teacher said in class so I can answer the questions correctly.
1 2 3 4 5 6 7
28. Before I begin studying for science I think about the things I will need to do to learn. 1 2 3 4 5 6 7
29. When I study for science I put important ideas into my own words. 1 2 3 4 5 6 7
30. When I study for a science test, I try to remember as many facts as I can. 1 2 3 4 5 6 7
31. I work hard to get a good grade even when I don’t like science. 1 2 3 4 5 6 7
32. I use what I have learned from old homework assignments and the textbook to do new science assignments.
1 2 3 4 5 6 7
33. When I am solving a science problem, I stop once in a while to go over what I have done. 1 2 3 4 5 6 7
34. Even when my science work is dull and boring, I keep working until I finish. 1 2 3 4 5 6 7
35. I outline the chapters of my science book to help me study. 1 2 3 4 5 6 7
36. I often find that I have been doing all the work for science class but don’t know what it is all about.
1 2 3 4 5 6 7

175
Not
at a
ll tru
e So
mew
hat
true
Ver
y tru
e
37. I always try to understand what my science teacher is saying, even if it doesn’t make sense. 1 2 3 4 5 6 7
38. When I read for science class, I try to connect the things I am reading about with what I already know.
1 2 3 4 5 6 7
39. When my science work is hard, I either give up or study only the easy parts. 1 2 3 4 5 6 7

176
Appendix D: Post-survey
Think back to the genetics game you played recently. How much do you agree with the following statements about the game? Circle one answer for each.
Dis
agre
e a
lot
Dis
agre
e a
little
Neu
tral
Agr
ee a
lit
tle
Agr
ee
a lo
t
40. I enjoyed playing the game. 1 2 3 4 5
41. I was skilled at playing the game. 1 2 3 4 5
42. I would like to play another game like this, if I could. 1 2 3 4 5
43. I was successful at playing the game. 1 2 3 4 5
44. The game was fun. 1 2 3 4 5
45. I learned from the game. 1 2 3 4 5
46. Imagine that your friend Tai plays a puzzle. He gets 7 out of 10 challenges
right and loses the puzzle. Why was this game lost? 47. Imagine that your friend Tai plays a different puzzle. This time, he gets 9 out
of 10 challenges and wins the puzzle. Why was this game won?
9. Did you have a strategy for playing the game? Tell us about it.
Thank you very much! We really appreciate your help!

177
Appendix E: Example Puzzle for each Topic
Punnett squares

178
Probability

179
Prediction

180
Family Trees

181
Co-dominance

182
Punnett squares with 2 genes

183
Family trees with 2 genes

184
Appendix F: Example Set of Resources for Family Tree Topic
Preview
The preview is a practice puzzle. Students can input answers but they will not get
“graded.”

185
Reading

186
Feedback

187
Answers

188
Explanation of Answers

189
References
Aleven, V., & Koedinger, K. R. (2000). Limitations of student control: Do students
know when they need help? In C. F. G. Gauthier & K. VanLehn (Eds.), Proceedings of the 5th International Conference on Intelligent Tutoring Systems, ITS 2000 (pp. 292–303). Berlin: Springer-Verlag.
Aleven, V., McLaren, B., Roll, I., & Koedinger, K. (2004). Toward tutoring help seeking: Applying cognitive modeling to meta-cognitive skills. In J. C. Lester, R. M. Vicario, & F. Paraguaçu (Eds.), Proceedings of Seventh International Conference on Intelligent Tutoring Systems (pp. 227-239). Berlin: Springer Verlag.
Aleven, V., Stahl, E., Schworm, S., Fischer, F., & Wallace, R. (2003). Help seeking and help design in interactive learning environments. Review of Educational Research, 73(3), 277-320.
Allport, G.W. (1937). Personality: A psychological interpretation. New York: Holt. Ames, C. & Archer, J. (1988). Achievement goals in the classroom: Students’
learning strategies and motivation processes. Journal of Educational Psychology, 80(3), 260-267.
Azevedo, R., Guthrie, J.T., & Seibert, D. (2004). The role of self-regulated learning in fostering students’ conceptual understanding of complex systems in hypermedia. Journal of Educational Computing Research, 30(1&2), 87-111.
Bandura, A. (1997). Self-efficacy: The exercise of control. New York: W.H. Freeman.
Baker, R.S., Corbett, A.T., & Koedinger, K.R. (2004). Detecting student misuse of intelligent tutoring systems. Lecture Notes in Computer Science, 3220, 54-76.
Baker, R.S., Corbett, A.T., Koedinger, K.R., Wagner, A.Z. (2004) Off-Task Behavior in the Cognitive Tutor Classroom: When Students "Game The System". Proceedings of ACM CHI 2004: Computer-Human Interaction, 383-390.
Bereiter, C., & Scardamalia, M. (1992). Surpassing ourselves: An inquiry into the nature and implications of expertise. Chicago: Open Court.
Biswas, G., Leelawong, K., Schwartz, D. L., Vye, N., & TAG-V (2005). Learning by teaching: A new agent paradigm for educational software. Applied Artificial Intelligence, 19, 363-392.
Blair, K. P. (2009). The neglected importance of feedback perception in learning: An analysis of children and adult’s uptake of quantitative feedback in a mathematics simulation environment. Unpublished dissertation.
Blumenfeld, P.C., Pintrich, P.R., Meece, J., & Wessels, K. (1982). The formation and role of self perceptions of ability in elementary classrooms. The Elementary School Journal, 82(5), 400-420.
Butler, D.L., & Winne, P.I. (1995). Feedback and self-regulated learning: A theoretical synthesis. Review of Educational Research, 65(3), 245-281.
Chase, C.C. (In press). Motivating expertise: Equipping novices with the motivational tools to move beyond failure. To appear in J.J. Staszewski (Ed.), Expertise and

190
skill acquisition: The impact of William G. Chase. New York: Psychology Press.
Chase, C.C., Chin, D.B., Oppezzo, M.A., & Schwartz, D.L. (2009). Teachable Agents and the Protégé Effect: Increasing the effort towards learning. Journal of Science Education and Technology, 18(4), 334-352.
Chase, W.G., & Simon, H.A. (1973). The mind’s eye in chess. In W.G. Chase (Ed.), Visual information processing (pp. 215-281). New York: Academic.
Chin, D.B., Dohmen, I.M., Cheng, B.H., Oppezzo, M.A., Chase, C.C., & Schwartz, D.L. (2010). Preparing students for future learning with Teachable Agents. Educational Technology Research and Development, 58(6), 649-669.
Covington, M.V., & Omelich, C.L. (1981). As failures mount: Affective and cognitive consequences of ability demotion in the classroom. Journal of Educational Psychology, 73(6), 796-808.
Deci, E.L., & Ryan, R.M. (1985). Intrinsic motivation and self-determination in human behavior. New York: Plenum Press.
Dunbar, K. (1999). How scientists build models: In vivo science as a window on the scientific mind. In L. Magnani, N. Nersessian, & P. Thagard (Eds.), Model-based reasoning in scientific discovery (pp. 89-98). New York: Plenum Publishers.
Diener C. & Dweck, C. (1978). An analysis of learned helplessness: Continuous changes in performance, strategy, and achievement cognitions following failure. Journal of Personality and Social Psychology, 36, 451-462.
Dweck, C.S. (1986). Motivational processes affecting learning. American psychologist, 41(10), 1040-1048.
Ericsson, K.A. (2002). Attaining excellence through deliberate practice: Insights from the study of expert performance. In M. Ferrari (Ed.), The pursuit of excellence through education (pp. 21-55). Mahwah, New Jersey: Lawrence Erlbaum Associates.
Elig, T.W., & Frieze, I.H. (1979). Measuring causal attributions for success and failure. Journal of Personality and Social Psychology, 37(4), 621-634.
Ertmer, P.A., & Newby, T.J. (1996). The expert learner: Strategic, self-regulated, and reflective. Instructional Science, 24(1), 1-24.
Frieze, I.H., & Bar-Tal, D. (1980). Developmental trends in cue utilization for attributional judgments. Journal of Applied Developmental Psychology, 1(2), 83-94.
Hiroto, D.S., & Seligman, M.E. (1975). Generality of learned helplessness in man. Journal of Personality and Social Psychology, 31(2), 311-327.
Kapur, M. (2008.) Productive failure. Cognition and Instruction, 26, 379-424.
Kluger, A.N., & DeNisi, A. (1996). Effects of feedback intervention on performance: A historical review, a meta-analysis, and a preliminary feedback intervention theory. Psychological Bulletin, 119(2), 254-284.

191
Lau, S., & Roeser, R. W. (2002). Cognitive abilities and motivational processes in high school students' situational engagement and achievement in science. Educational Assessment, 8(2), 139-162.
Leddo, J., Abelson, R.P., & Gross, P.H. (1984). Conjunctive explanations: When two reasons are better than one. Journal of Personality and Social Psychology, 47(5), 933-943.
Mandl, H., Gräsel, C., & Fischer, F. (2000). Problem-oriented learning: Facilitating the use of domain-specific and control strategies through modeling by an expert. In W. J. Perrig & A. Grob (Eds.), Control of human behavior, mental processes and consciousness (pp. 165–182). Mahwah, NJ: Erlbaum.
Mezulis, A.H., Abramson, L.Y., Hyde, J.S., Hankin, B.L. (2004). Is there a universal positivity bias in attributions? A meta-analytic review of individual, developmental, and cultural differences in the self-serving attributional bias. Psychological Bulletin, 130(5), 711-747.
Midgley, C., Maehr, M. L., Hruda, L. Z., Anderman, E., Anderman, L., Freeman, K. E., Gheen, M., Kaplan, A., Kumar, R., Middleton, M. J., Nelson, J., Roeser, R., & Urdan, T., (2000). Manual for the Patterns of Adaptive Learning Scales (PALS), Ann Arbor, MI: University of Michigan.
Nicholls, J. (1990). What is ability and why are we mindful of it? A developmental perspective. In R. Sternberg & J. Kolligian, Jr. (Eds.). Competence considered (pp. 11-40). New Haven: Yale University Press.
Nelson-Le Gall, S. (1981). Help-seeking: An understudied problem-solving skill in children. Developmental Review, 1, 224–246.
Newman, R. S. (1994). Adaptive help seeking: A strategy of self-regulated learning. In D. H. Schunk & B. J. Zimmerman (Eds.), Self-regulation of learning and performance: Issues and educational applications (pp. 283–301). Hillsdale, NJ: Erlbaum.
Nisbett, R.E. (1987). Teaching reasoning. Science, 238(4827), 625-631. Perry, N.E. (1998). Young children’s self-regulated learning and contexts that support
it. Journal of Educational Psychology, 90, 715-729. Peterson, C., Semmel, A., von Baeyer, C., Abramson, L.Y., Metalsky, G., &
Seligman, M. (1982). The attributional style questionnaire. Cognitive Therapy and Research, 6(3), 287-299.
Peterson, C., Maier, S.F., & Seligman, M.E. (1993). Learned helplessness: A theory for the age of personal control. New York: Oxford University Press.
Pintrich, P.R. (2004). A conceptual framework for assessing motivation and self-regulated learning in college students. Educational Psychology Review, 16(4), 385-407.
Pintrich, P.R., Smith, D.A.F., Garcia, T. & Mckeachie, W.J. (1993). Reliability and predictive validity of the Motivated Strategies for Learning Questionnaire (Mslq). Educational Psychology and Measurement, 53(3), 801-813.

192
Pintrich, P.R., & De Groot, E.V. (1990). Motivational and self-regulated learning components of classroom academic performance. Journal of Educational Psychology, 82(1) 33-40.
Relich, J.D., Debus, R.L., & Walker, R. (1986). The mediating role of attribution and self-efficacy variables for treatment effects on achievement outcomes. Contemporary Educational Psychology, 11(3), 195-216.
Reeve, J.M., Olson, B.C., & Cole, S.G. (1985). Motivation and performance: Two consequences of winning and losing in competition. Motivation and Emotion, 9(3), 291-298.
Renkl, A. (2002). Learning from worked-out examples: Instructional explanations supplement self-explanations. Learning & Instruction, 12, 529–556.
Rhodewalt, F., Morf, C.C., Hazlett, S., & Fairfield, M. (1991). Self-handicapping: The role of discounting and augmentation in the preservation of self-esteem. Journal of Personality and Social Psychology, 61, 122-31.
Roll, I., Aleven, V., McLaren, B. M., & Koedinger, K. R. (2007). Can help seeking be tutored? Searching for the secret sauce of metacognitive tutoring. In R. Luckin, K. R. Koedinger, & J. Greer (Eds.), Proceedings of the international conference on artificial intelligence in education (pp. 203-210). Amsterdam: IOS Press.
Santagata, R. (2005) Practices and Beliefs in Mistake-Handling Activities: A Video Study of Italian and U.S. Mathematics Lessons. Teaching and Teacher Education, 21, 491-508.
Schlenker, B.R., Pontari, B.A., Christopher, A.N. (2001). Excuses and character: Personal and social implications of excuses. Personality and Social Psychology Review, 5(1), 15-32.
Schunk, D.H. (1982). Effects of effort attributional feedback on children’s perceived self-efficacy and achievement. Journal of Educational Psychology, 74, 548-556.
Schunk, D. H. (1983). Ability versus effort attributional feedback: Differential effects on self-efficacy and achievement. Journal of Educational Psychology, 75, 848-856.
Schunk, D.H., Pintrich, P.R., & Meece, J.L. (2008). Motivation in education: Theory, research, and applications. Upper Saddle River: Pearson/Merrill Prentice Hall.
Snyder, C.R., & Higgins, R.L. (1988). Excuses: Their effective role in the negotiation of reality. Psychological Bulletin, 104(1), 23-35.
Schwartz, D. L., Blair, K. P., Biswas, G., Leelawong, K., & Davis, J. (2007). Animations of thought: Interactivity in the teachable agents paradigm. In R. Lowe & W. Schnotz (Eds). Learning with animation: Research and implications for design (pp. 114-40). UK: Cambridge University Press.
Schwartz, D.L., & Martin, T. (2004). Inventing to Prepare for Future Learning: The hidden efficiency of encouraging original student production in statistics instruction. Cognition and Instruction, 22(2), 129-184.
Seligman, M., & Maier, S. (1967). Failure to escape traumatic shock. Journal of Experimental Psychology, 74, 1-9.

193
Shute, V. J., & Gluck, K. A. (1996). Individual differences in patterns of spontaneousonline tool use. Journal of the Learning Sciences, 5, 329–355.
Siegler, R.S. (2002). Microgenetic studies of self-explanation. In N. Granott & J. Parziale (Eds). Microdevelopment: Transition processes in development and learning (pp. 31-58). UK: Cambridge University Press.
Stigler, J. W. & Hiebert, J. (1999). The teaching gap: Best ideas from the world’s teachers for improving education in the classroom. New York: The Free Press.
Stipek, D.J., & Weisz, J.R. (1981). Perceived personal control and academic achievement. Review of Educational Research, 51(1), 101-137.
Taylor, S.E., & Brown, J.D. (1988). Illusion and well-being: A social psychological perspective on mental health. Psychological Bulletin, 103(2), 193-210.
Turner, J.C. (1995). The influence of classroom contexts on young children’s motivation for literacy. Reading Research Quarterly, 30, 410-441.
Vanlehn, K., Siler, S., Murray, C., Yamauchi, T., & Baggett, W. B. (2003). Why do only some events cause learning during human tutoring? Cognition and Instruction, 21(3), 209-249.
Vallerand, R.J., Gauvin, L.I., & Halliwell, W.R. (1986). Effects of zero-sum competition on children’s intrinsic motivation and performance. The Journal of Social Psychology, 126(4), 465-472.
Weiner, B. (1979). A theory of motivation for some classroom experiences. Journal of Educational Psychology, 71(1), 3-25.
Weiner, B. (1985). An attributional theory of achievement motivation and emotion. Psychological Review, 92, 548-573.
Weiner, B. (1986). An attributional theory of motivation and emotion. New York: Springer-Verlag.
Weinstein, C.E., Schulte, A., & Palmer, D. (1987). LASSI: Learning and study strategies inventory. Clearwater, FL: H&H Publishing.
Winne, P.I. (2001). Self-regulated learning viewed from models of information processing. In B.J. Zimmerman & D. Schunk (Eds). Self-Regulated Learning and Academic Achievement: Theoretical Perspectives. (pp. 153-190). Mahwah, NJ: Lawrence Erlbaum Associates.
Winne, P.I., & Perry, N.E. (2000). Measuring self-regulated learning. In M. Boekaerts, P. Pintrich, & M. Zeidner (Eds). Handbook of Self-Regulation. (pp. 531-566). San Diego: Academic Press.
Wood, D. (2001). Scaffolding, contingent tutoring, and computer-supported learning. International Journal of Artificial Intelligence in Education, 12, 280–292.
Wood, H., & Wood, D. (1999). Help seeking, learning and contingent tutoring. Computers and Education, 33, 153–169.
Zimmerman, B.J. (1989). A social cognitive view of self-regulated academic learning. Journal of Educational Psychology, 81(3), 329-339.
Zimmerman, B.J. (1994). Dimensions of academic self-regulation: A conceptual framework for education. In D.H. Schunk & B.J. Zimmerman (Eds). Self-regulation of Learning and Performance: Issues and Educational Applications. (pp. 3-24). Hillsdale, NJ: Lawrence Erlbaum Associates.

194
Zimmerman, B.J. (2002). Becoming a self-regulated learner: An overview. Theory into Practice, 41(2), 64-70.
Zimmerman, B.J., & Marinez-Pons, M. (1986). Development of a structured interview for assessing student use of self-regulated learning strategies. American Educational Research Journal, 23, 614-628.