
Robust Graph-Cut Scene Segmentation and Reconstruction for ...

1
Motion Segmentation andDense Reconstruction of Scenes
Containing Moving Objects Observed by a Moving Camera
Chang Yuan
Institute of Robotics and Intelligent Systems
Computer Science Department
Viterbi School of Engineering
University of Southern California2/49
Problem Definition
• Scenario: rigidly moving objects + moving camera
• Goal• 2D motion segmentation: motion regions / background area
• 3D dense reconstruction: object shape / background structure
3/49
2D Motion Segmentation
4/49
3D Shape + Trajectory Reconstruction

2
5/49
Challenges & Applications
• Information sources
• Pixel colors + 2D coordinates
• No object model information is available
• Difficulties
• Camera motion
• Multiple moving objects
• 3D static structures (parallax)
• Applications
• Video surveillance
• Image synthesis
• …
6/49
Overview of the Approach
Dynamic voxel
coloring scheme (CVPR’07, Journal(?))
My contributions:
2D => 3D
Sparse => Dense
Sparse => Dense
Parallax rigidity constraint
(ICCV’05, PAMI)
Planar-motion constraint
(CVPR’06, PAMI(?))
7/49
Outline
• Introduction
• 2D Shape Recovery
• Multi-image registration
• Motion segmentation
• Object tracking
• 3D Shape Recovery
• Sparse reconstruction
• Dense volumetric reconstruction
• Summary and Discussion
Math background:
• Linear algebra
• Optimization
8/49
Outline
• Introduction
• 2D Shape Recovery
• Multi-image registration
• Motion segmentation
• Object tracking
• 3D Shape Recovery
• Sparse reconstruction
• Dense volumetric reconstruction
• Summary and Discussion

3
9/49
Motion Segmentation – Overview
• Task: to detect moving objects and track them
• Assumptions• General camera motion
• Distant scene
• Textured background
10/49
Motion Segmentation – Related Work
• Detecting moving objects from static cameras
• Background modeling
• Frame subtraction
• Optical flow based segmentation
• Motion layers (not necessarily a moving object)
• Point clustering
• Divide sparse feature matches into different motion groups
• “Plane+Parallax” approaches
• A constant reference plane + off-plane structure (parallax)
11/49
Feature Extraction & Matching
• Salient parts of the scene
• Extraction• Harris corners
• Multi-scale
• Multi-orientation
• Sub-pixel accuracy
• Matching• Small inter-frame motion
• Gray-scale windows
• Cross correlation
• Large viewpoint change
• Gradient histogram
• Vector angle
12/49
Multiple Image Registration
• Frame motion model
• Assumptions:
• Small inter-frame motion
• Distant planar scene
• 2D affine transform
• Robust estimation
• Random Sample Consensus
(RANSAC)
• Keep the model with the
largest number of inliers
• Non-linear refinement over
the inliers
=
11100
2
2
1
1
232221
131211
v
u
v
u
AAA
AAA
21 pAp =

4
13/49
Frame t-w Frame t+w
Frame t
t: reference framew: half size of the window
Initial Motion Segmentation (1)
• Two-frame pixel-level segmentation?
• Segmentation within a temporal window
• Accumulate the pixels warped from adjacent frames
• K-Means to find the most representative pixel
• Frame differencing and thresholding: |Ioriginal-Imodel|>ΔI
14/49
Initial Motion Segmentation (2)
• Residual pixels
• Motion regions
• Parallax pixels
• Parallax filtering
• Estimate additional geometric constraints
• Epipolar constraint
• Parallax rigidity constraint
• Evaluate the disparities w.r.t. the constraints
• Parallax or motion?
15/49
Epipolar Constraint (1)
1C1e 2e
2C
2l
P
1p
2/)''( 2211 plpl ⋅+⋅=epidDisparity (pixel-to-line distances):
[ ] 0
1
1 1
1
1222 =
v
u
vu F
1'l
2'p
'P
Fundamental matrix:
16/49
Epipolar Constraint (2)
2D: pixels move on the epipolar lines
3D: camera and object are co-planar
Which happens sometimes!

5
17/49
Epipolar Constraint (3)
• Degenerate motion cannot be detected by epipolar constraint
• This is the best we can do in 2 views
• Solution
• Three or more views
• Trilinear Constraint• Hard to estimate
• Large camera baseline
• Sensitive to image noise
• Solution• A novel parallax rigidity constraint
C1
C2
p1
I1
P
C3
p2
I2
I3p3
18/49
Parallax Rigidity Constraint (1)
Plane+Parallax decomposition
[ ]Tkvuk 121112112 1);( == pP
C1
A12p1
C2
e12
I1
P
I2
p2
Projective 3D structure:
Parallax term:
Hz
Hk ∝
[ ]Tkvu 121112 1=P
[ ]Tkvu 232223 1=P
relationship?
19/49
Parallax Rigidity Constraint (2)
• Bilinear relationship:
• The G matrix
• 4×4 matrix
• 10 unknowns (rank-2): camera motion and plane variation
• Disparity computation:
• Estimation: RANSAC (15 points) + non-linear refinement
1223 PGPG
T
d =
[ ] 01
1
12
1
1
2322 =
k
v
u
kvu G[ ] 0
1
1 1
1
1222 =
v
u
vu F
Similar to the
epipolar constraint:
20/49
Sequential Motion Segmentation (1)
• Geometric constraints
• Affine: 2-view
• Epipolar: 2-view
• Parallax: 3-view
• Sequential classification scheme
• Consistency w.r.t. constraints
• Based on a decision tree
• Motion probability

6
21/49
Sequential Motion Segmentation (2)
Frame 55 Frame 60 Frame 65
Epipolar constraint disparity Parallax rigidity disparityBefore parallax filtering After parallax filtering
Initial motion mask
22/49
Sequential Motion Segmentation (3)
• Degenerate cases
• Camera motion and object motion are both co-planar and proportional
Which happens rarely!
23/49
Spatial-temporal Object Tracking
• Graphical representation
• Likelihood (edge weights) of motion regions (nodes)
• Appearance
• 2D velocity
• Motion probability (disparities)
• Finding paths to maximize joint likelihood
• Viterbi algorithm
Frame 45 Frame 50 Frame 55
[Kang’05]
24/49
Experimental Results (1)
Original
Images
Tracking Results
Initial Detection
Results
Motion
Prob. Maps

7
25/49
Experimental Results (2)
Initial Detection
Results
Motion
Prob.
Maps
Tracking
Results
Original
images
26/49
Experimental Results (3)
Framesubtraction
Initial
detectionTracking
results
Original
images
27/49
Experimental Results (4)
A synthesized video without motion regions 28/49
Experimental Results (5)
• Time complexity: O(ImgW*ImgH*W)
• Video frame size: e.g. 720*480
• Temporal window size: e.g. 90 frames
• ~1 frame per second (after GPU acceleration by Qian Yu)
• Quantitative evaluation
• Hand-labeled ground truth (~100 frames per sequence)
Filtered motion mask Labeled motion regionsRecall (detection rate); Precision (1-false alarm rate)

8
29/49
2D Motion Segmentation - Summary
• Geometric representation of motion vs. depth (parallax)
• Contributions
• Sequential motion segmentation
• A novel parallax rigidity constraint
• Applicable sequences
• Distant cluttered background with moving objects
• Future directions
• Region based motion segmentation
• Shadow removal
30/49
Outline
• Introduction
• 2D Shape Recovery
• Multi-frame registration
• Motion segmentation
• Object tracking
• 3D Shape Recovery
• Sparse reconstruction
• Dense volumetric reconstruction
• Summary and Discussion
31/49
3D Shape Recovery - Overview
• Task
• Recover the 3D shape of both moving objects and the static background
• Estimate the 3D motion trajectory of the camera and the objects
• Assumptions
• General camera motion and rigid object motion
• Textured background with a constant ground plane
32/49
Sparse Reconstruction – Related work
• Structure from/and Motion
• A moving camera + a static scene
• Well-developed methods
• Reconstruction of moving objects
• A moving camera + moving objects
• Relative camera-object motion
• Object motion estimation
• Linear trajectory
• More general trajectories
Vidal & Sastry, CVPR’03
Avidan & Shashua, PAMI ‘00

9
33/49
Reconstruction of Static Background
• Perspective projection model
• SaM procedure
• 3D camera motion (R, t): decomposition of fundamental matrices
• Intrinsic parameters K: camera calibration
• 3D point positions P: triangulation
• Bundle Adjustment:
[ ]
≅
1
1z
y
x
v
u
tRKjkkj PMp ≅
2
,
min∑ −jk
jkkj PMp
1C 2C
1p 2p
P
34/49
Shape Recovery for Moving Objects
• Relative camera-object motion
Moving Object
Moving Camera (Real) Moving Camera (Virtual)
Static Objectvirtual camera motion = real camera motion – object motion
35/49
3D Alignment of Moving Objects
• 3D object motion estimation
• Rotation is solved uniquely
• Translation depends on the
object scale
• More constraints are needed!
v
k
r
k
b
k RRR 1)( −=
v
k
b
k
r
k
b
k CRCT σ−=
Object motion
Real & virtualcamera motion
k: frame number
b: object
r: real camera
v: virtual camera
object motion = real camera motion – virtual camera motion
virtual camera motion = real camera motion – object motion
36/49
Planar-motion Constraint (1)
• Object’s motion trajectory must be planar
• Known plane
• Solve the object translation at each frame
• Unknown plane
• The correct scale leads to rank-2-ness
0=⋅b
kTN
v
k
b
k
r
k
b
k CRCT σ−= 0CTCR =−× ) ()( r
k
b
k
v
k
b
k
0=⋅b
kTN
[ ][ ][ ]v
K
b
K
vb
r
K
r
b
K
b
CRCR
CC
TT
�
�
�
11
1
1
σ−
=

10
37/49
Planar-motion Constraint (2)
• Degenerate motion
• Object motion is both parallel and proportional to camera movement
• Can be easily detected
2rank 111=
v
K
b
K
r
K
vbr
CRC
CRC
�
�
[ ][ ][ ]v
K
b
K
vb
r
K
r
b
K
b
CRCR
CC
TT
�
�
�
11
1
1
σ−
=
Which happens rarely!
38/49
Experimental Results – Sparse Reconstruction (1)
39/49
Experimental Results – Sparse Reconstruction (2)
40/49
Experimental Results – Sparse Reconstruction (3)
• Quantitative results
• Average re-projection errors: ∑∑= =
−K
k
N
j
jkkjKN 1 1
1PMp
Reconstruction of Static Background
Reconstruction of Moving Objects
Motion Trajectory Estimation
Unit: pixel
11
41/49
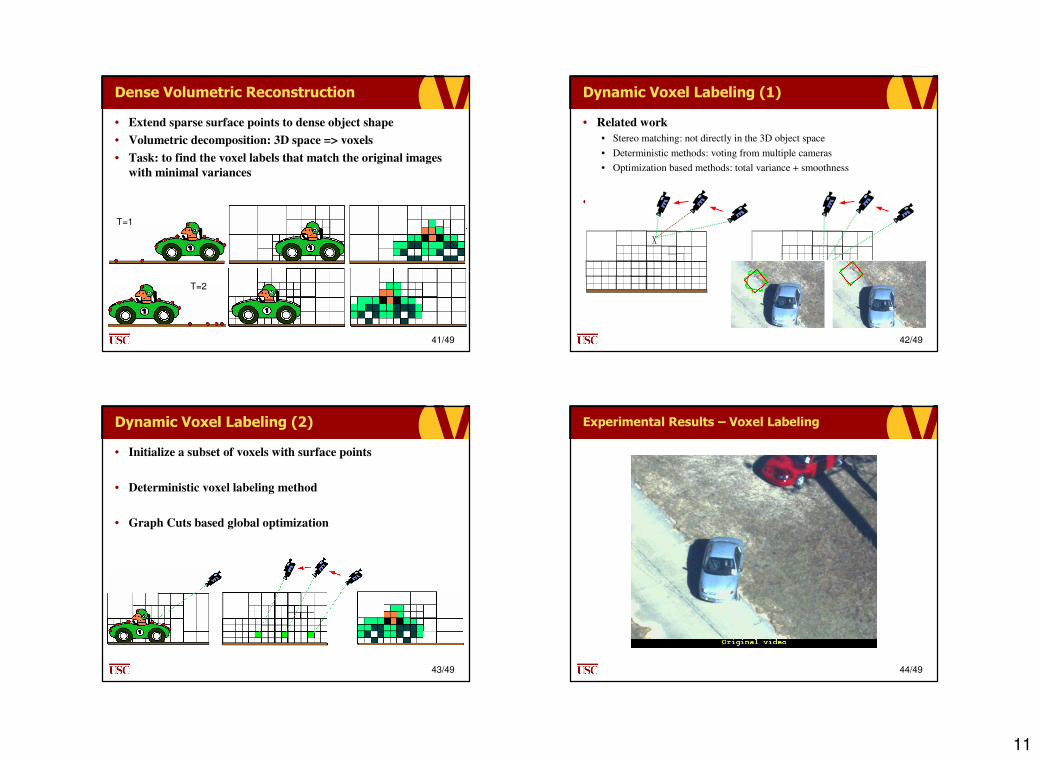
Dense Volumetric Reconstruction
• Extend sparse surface points to dense object shape
• Volumetric decomposition: 3D space => voxels
• Task: to find the voxel labels that match the original images
with minimal variances
T=1
T=2
42/49
• Related work
• Stereo matching: not directly in the 3D object space
• Deterministic methods: voting from multiple cameras
• Optimization based methods: total variance + smoothness
• Photo-motion variance measure
• Color variance:
• Multi-oriented 2D patches projected from 3D voxels
• Normalized correlation
• Motion variance
• Overlap of voxels
Dynamic Voxel Labeling (1)
X
43/49
Dynamic Voxel Labeling (2)
• Initialize a subset of voxels with surface points
• Deterministic voxel labeling method
• Graph Cuts based global optimization
44/49
Experimental Results – Voxel Labeling

12
45/49
3D Shape Recovery - Summary
• A complete 3D replica of dynamic scenes
• Shape + motion trajectories
• Contributions
• 3D alignment process based on the planar motion constraint
• Voxel labeling process with the photo-motion variance measure
• Applicable scenes
• Cluttered background + large-size moving objects
• Future directions
• Surface mesh generation
• Non-rigid object motion
46/49
Outline
• Introduction
• 2D shape recovery
• Multi-frame registration
• Motion segmentation
• Object tracking
• 3D shape recovery
• Sparse reconstruction
• Dense volumetric reconstruction
• Summary and Discussion
47/49
Summary & Discussion
• Geometric analysis of dynamic scenes
• Moving camera + rigid moving objects
• 2D and 3D shape of both static background and moving objects
• Highlights
• Theoretical contributions: linear algebra-based derivations
• Methodological contributions: a multi-stage process
• Encouraging results
• Future directions
• Multi-view geometry + object recognition
• Automatically determination of applicable tasks
48/49
Acknowledgement
• Prof. Gérard Medioni
• Prof. Ram Nevatia and Prof. Isaac Cohen
• Prof. James Moore II and Prof. Alexander Tartakovsky
• Colleagues: Jinman Kang, Douglas Fidaleo, and Qian Yu
• My wife Lan Jiang, my family and Lan’s family
• VACE program

13
49/49
Q&A
Thank you!

















