Computational Photography: Image Registration Jinxiang Chai.
date post
21-Dec-2015Category
view
243download
0
Motion Representation & forward Kinematics
Jinxiang Chai

Topics
• Representing charactersRepresenting characters
• Transformation hierarchiesTransformation hierarchies
• Skeleton file (.asf file)Skeleton file (.asf file)
• Motion data file (.amc file)Motion data file (.amc file)

Assumptions
Linear algebraLinear algebra
• matrix multiplication, linear transformationsmatrix multiplication, linear transformations

b da c
i
m
f
l
q
he
j k
pon
Px
Py
Pz
1
Transformation Matrix

01 0
1
1
1
00
0 0
000
Ty
Tz
Tx
Translation along x, y and z axis
Translation Matrix

We know how to rotate about the global axes
1 0 00 cos() -sin()0 sin() cos()
cos() -sin() 0sin() cos() 0 0 0 1
cos() 0 sin() 0 1 0-sin() 0 cos()
Rotate θ around x axis
Rotate θ around z axisRotate θ around y axis
Rotation matrices

Character Models are rich, complexCharacter Models are rich, complex
• hair, clothes (particle systems)hair, clothes (particle systems)
• muscles, skin (FFD’s muscles, skin (FFD’s etc.etc.))
Focus is rigid-body Degrees of Freedom (DOFs)Focus is rigid-body Degrees of Freedom (DOFs)
• joint anglesjoint angles
• what we can currently obtain from motion capture datawhat we can currently obtain from motion capture data
Character Representation

Simple Rigid Body Skeleton
Copyright © Squaresoft 1999
Who wins? You decide.Who wins? You decide.
vs.vs.

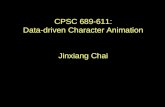
Human Motion Representation
How to represent right leg motion?

Representing a Skeleton
Model & connect each boneModel & connect each bone
• difficult to formulate joint limitsdifficult to formulate joint limits
• not very efficient either not very efficient either
– explicit constraints for jointsexplicit constraints for joints
– many wasted DOFsmany wasted DOFs
xh,yh,zh,h,h,h
xt,yt,zt,t,t,t
xc,yc,zc,c,c,c
xf,yf,zf,f,f,f

Efficient Skeleton: Hierarchy
Implicitize joint constraintsImplicitize joint constraints
• each bone relative to parenteach bone relative to parent
• easy to limit joint angleseasy to limit joint angles
• very efficientvery efficient
– # angles = # DOFs# angles = # DOFs
– no constraints to enforceno constraints to enforce
– leverages graphics libraries leverages graphics libraries and hardwareand hardware
xh,yh,zh,h,h,h
t,t,t
c
f,f
hips
r-upper leg
r-lower leg
r-foot
left-leg ...

Operations on Hierarchies
Specify posesSpecify poses
Draw the character in a given poseDraw the character in a given pose
Compute positions and orientations on bodyCompute positions and orientations on body
for example...

Computing a Sensor Position
Forward kinematicsForward kinematics
• uses vector-matrix multiplicationuses vector-matrix multiplication
• transformation matrix is composition of all joint transformation matrix is composition of all joint transforms between sensor/effector and roottransforms between sensor/effector and root
xh,yh,zh,h,h,h
t,t,t
c
f,f
vs
y
x
z
w =vsv( , )
ffq fTR( )cqTR( , , )
t t tq f sTR( , , ) ( , , )
h h h h h hx y z q f sT R
vsvs

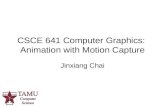
Joints = Rotations
To specify a pose, we specify the joint-angle rotationsTo specify a pose, we specify the joint-angle rotations
Each joint can have up to three rotational DOFsEach joint can have up to three rotational DOFs
1 DOF: knee1 DOF: knee 2 DOF: wrist2 DOF: wrist 3 DOF: arm3 DOF: arm

Representing Motions
animation = Pose(time)animation = Pose(time)
See demo using maya!See demo using maya!

Motion Capture Data
Each sequence of human motion data contains Each sequence of human motion data contains two files:two files:
• Skeleton file (.asf): Skeleton file (.asf):
Specify the skeleton model of characterSpecify the skeleton model of character
• Motion data file (.amc): Motion data file (.amc):
Specify the joint angle values over the frame/timeSpecify the joint angle values over the frame/time

.ASF file
Specify character skeletonSpecify character skeleton
• Individual boneIndividual bone
• Bone hierarchyBone hierarchy

.ASF file: Bones
For each bone
begin id bone_id //Unique id for each bone name bone_name //Unique name for each bone direction dX dY dZ //Vector describing direction of the bone in world coor. system length 7.01722 //Length of the bone axis 0 0 20 XYZ //Rotation of local coordinate system for //this bone relative to the world coordinate //system. In .AMC file the rotation angles //for this bone for each time frame will be //defined relative to this local coordinate //system dof rx ry rz //Degrees of freedom for this bone. limits (-160.0 20.0) (-70.0 70.0) (-60.0 70.0) end

. ASF file: Hierarchy
:hierarchy begin root lhipjoint rhipjoint lowerback lhipjoint lfemur lfemur ltibia ltibia lfoot lfoot ltoes rhipjoint rfemur rfemur rtibia rtibia rfoot rfoot rtoes lowerback upperback upperback thorax thorax lowerneck lclavicle rclavicle
lowerneck upperneck upperneck head lclavicle lhumerus lhumerus lradius lradius lwrist lwrist lhand lthumb lhand lfingers rclavicle rhumerus rhumerus rradius rradius rwrist rwrist rhand rthumb rhand rfingers end

. ASF file: Hierarchy
:hierarchy begin root lhipjoint rhipjoint lowerback
• Three bones connected to root
• Root is the parent node of lhipjoint, rhipjoint, and lowerback
root lhipjoint rhipjoint
lowerback

. ASF file: Hierarchy
rhips
rfemur
rtibia
r-foot
right-leg:hierarchy begin root lhipjoint rhipjoint lowerback lhipjoint lfemur lfemur ltibia ltibia lfoot lfoot ltoes rhipjoint rfemur rfemur rtibia rtibia rfoot rfoot rtoes lowerback upperback upperback thorax thorax lowerneck lclavicle rclavicle
lowerneck upperneck upperneck head lclavicle lhumerus lhumerus lradius lradius lwrist lwrist lhand lthumb lhand lfingers rclavicle rhumerus rhumerus rradius rradius rwrist rwrist rhand rthumb rhand rfingers end

Hierarchical Representation

.AMC file
i // frame numberroot -2.55317 16.3652 11.0758 -164.044 40.963 179.196 // root position and orientationlowerback -13.4812 3.58739 1.31326 // joint angles for lowerback jointupperback 2.71059 4.96065 -3.24804 // joint angles for thorax jointthorax 10.9583 2.59835 -3.13219lowerneck -13.4561 2.04484 3.87687upperneck 31.3081 7.2808 -9.21625head 13.2432 3.21452 -3.00079rclavicle -1.39845e-013 3.18055e-014rhumerus 13.7295 21.2853 -86.8555rradius 116.413rwrist -17.0142rhand -7.19777 10.0191rfingers 7.12502rthumb 18.6806 -19.1039
….
For each frame

Animation with .ASF and .AMC file
See demo!See demo!

• Representing charactersRepresenting characters
• Transformation hierarchiesTransformation hierarchies
• Skeleton file (.asf file)Skeleton file (.asf file)
• Motion data file (.amc fileMotion data file (.amc file
• Representing charactersRepresenting characters
• Transformation hierarchiesTransformation hierarchies
• Skeleton file (.asf file)Skeleton file (.asf file)
• Motion data file (.amc fileMotion data file (.amc file
Today’s topic

1) Create a 1) Create a handlehandle on body on body
• position or orientation position or orientation
2) Pull on the handle2) Pull on the handle
3) IK figures out how joint angles 3) IK figures out how joint angles should changeshould change
1) Create a 1) Create a handlehandle on body on body
• position or orientation position or orientation
2) Pull on the handle2) Pull on the handle
3) IK figures out how joint angles 3) IK figures out how joint angles should changeshould change
Next Lecture: Inverse Kinematics