MOTION DYNAMICS OF EXPLORATION ROVERS ON …yoshida/paperlist/FSR01-yoshida.pdf · MOTION DYNAMICS...
6
MOTION DYNAMICS OF EXPLORATION ROVERS ON NATURAL TERRAIN: EXPERIMENTS AND SIMULATION Kazuya Yoshida, Hisafumi Asai, and Hiroshi Hamano Department of Aeronautics and Space Engineering, Tohoku University, Sendai, Japan [email protected] Abstract: The goal of this research is to establish a physical model of wheel traction in the relation- ship of the motion dynamics, and thereby derive a traction control law to maximize the efficiency and to avoid critical trap or stack on uneven natural terrains. As an initial step, the experiments are carried out to observe the physical phenomena and extract essential parameters, and the dynamic simulations are developed to be compared with the experimental data. An illustrative simulation shows that the motion of the vehicle, including the adaptive response of the rocker-bogie suspension to rough terrain, is successfully modeled and simulated with the in-house software dynamics simulator. Keywords: planetary exploration, rover test bed, rocker-bogie suspension, slip ratio, articulated body dynamics 1. INTRODUCTION The advantage of a surface locomotion rover in planetary exploration has been proven by NASA’s Pathfinder mission in 1997 [1]. NASA recently an- nounced its 2003 Mars Exploration Program will include a couple of rovers in a larger scale with much longer traveling distance and more challeng- ing terrain comparing with those of the Pathfind- er rover [2]. In Japan, exploration rovers are dis- cussed under the NASDA/ISAS joint mission to Moon, named SELENE [3]. Corresponding to such growing attention and technology requirements, there are an increasing number of research papers on exploration rovers being published. The research area is very broad from mission design and analysis [4][5], rover de- signs [6][7][8], sensing and navigation, obstacle avoidance, traversal and path planning [9], motion kinematics and slip model [10], to field test [11][12], and so on. However, very few papers deal with motion dynamics based control. This is because the rovers are so far considered to move very slow- ly to experience dynamic effect, and also the dy- namic analysis seems so complicated as requiring sophisticated models of tire-soil traction mechan- ics and the body-suspension-wheel dynamics. But recently, some papers report advantage of physics based motion control that involves a model of trac- tion mechanics with quasi-static force distribution [13][14][15]. The approaches in this direction deal with the wheel-soil contact angle, which makes influence on the static force distribution tangent and normal to the surface at the contact point [10][13]. Howev- er, it is considered more essential to discuss the ratio of the tangent and normal forces involving the traction force as a function of the slip ratio at each dynamic situation, in addition to the stat- ic projection of the gravity force by the contact angle. The goal of this research is to establish a model to appropriately evaluate the traction force ratio in the relationship of the motion dynamics, and thereby derive a traction control law to maximize the efficiency and to avoid critical trap or stack. As an initial step, the experiments are carried out to observe the physical phenomena and extract essen- tial parameters, and the dynamic simulations are developed to be compared with the experimental data. This paper is organized as follows. In section 2, the rover test bed with 6 wheels connected by a Rocker-Bogie type link suspension is introduced. In section 3, the experimental data obtained with the test bed on dry sand are presented, then the profile of the tire slip is characterized. In section 4, the motion dynamics of an articulated rover is for- 1
Transcript of MOTION DYNAMICS OF EXPLORATION ROVERS ON …yoshida/paperlist/FSR01-yoshida.pdf · MOTION DYNAMICS...

MOTION DYNAMICS OF EXPLORATION ROVERS ONNATURAL TERRAIN:
EXPERIMENTS AND SIMULATION
Kazuya Yoshida, Hisafumi Asai, and Hiroshi HamanoDepartment of Aeronautics and Space Engineering,
Tohoku University, Sendai, [email protected]
Abstract: The goal of this research is to establish a physical model of wheel traction in the relation-ship of the motion dynamics, and thereby derive a traction control law to maximize the efficiency andto avoid critical trap or stack on uneven natural terrains. As an initial step, the experiments are carriedout to observe the physical phenomena and extract essential parameters, and the dynamic simulationsare developed to be compared with the experimental data. An illustrative simulation shows that themotion of the vehicle, including the adaptive response of the rocker-bogie suspension to rough terrain,is successfully modeled and simulated with the in-house software dynamics simulator.
Keywords: planetary exploration, rover test bed, rocker-bogie suspension, slip ratio, articulatedbody dynamics
1. INTRODUCTION
The advantage of a surface locomotion rover inplanetary exploration has been proven by NASA’sPathfinder mission in 1997 [1]. NASA recently an-nounced its 2003 Mars Exploration Program willinclude a couple of rovers in a larger scale withmuch longer traveling distance and more challeng-ing terrain comparing with those of the Pathfind-er rover [2]. In Japan, exploration rovers are dis-cussed under the NASDA/ISAS joint mission toMoon, named SELENE [3].
Corresponding to such growing attention andtechnology requirements, there are an increasingnumber of research papers on exploration roversbeing published. The research area is very broadfrom mission design and analysis [4][5], rover de-signs [6][7][8], sensing and navigation, obstacleavoidance, traversal and path planning [9], motionkinematics and slip model [10], to field test [11][12],and so on. However, very few papers deal withmotion dynamics based control. This is becausethe rovers are so far considered to move very slow-ly to experience dynamic effect, and also the dy-namic analysis seems so complicated as requiringsophisticated models of tire-soil traction mechan-ics and the body-suspension-wheel dynamics. Butrecently, some papers report advantage of physicsbased motion control that involves a model of trac-
tion mechanics with quasi-static force distribution[13][14][15].
The approaches in this direction deal with thewheel-soil contact angle, which makes influence onthe static force distribution tangent and normal tothe surface at the contact point [10][13]. Howev-er, it is considered more essential to discuss theratio of the tangent and normal forces involvingthe traction force as a function of the slip ratioat each dynamic situation, in addition to the stat-ic projection of the gravity force by the contactangle.
The goal of this research is to establish a modelto appropriately evaluate the traction force ratioin the relationship of the motion dynamics, andthereby derive a traction control law to maximizethe efficiency and to avoid critical trap or stack. Asan initial step, the experiments are carried out toobserve the physical phenomena and extract essen-tial parameters, and the dynamic simulations aredeveloped to be compared with the experimentaldata.
This paper is organized as follows. In section 2,the rover test bed with 6 wheels connected by aRocker-Bogie type link suspension is introduced.In section 3, the experimental data obtained withthe test bed on dry sand are presented, then theprofile of the tire slip is characterized. In section 4,the motion dynamics of an articulated rover is for-
1

Figure 1: The rover test bed (side view andfront view)
Figure 2: The rover test bed moving on rockyrough terrain
mulated for extensive simulations, and in Section5, an illustrative result of the simulation is present-ed. In the last two sections the motion of the vehi-cle, including the adaptive response of the rocker-bogie suspension to rough terrain, is successfullymodeled and simulated with the in-house softwaredynamics simulator, named the SpaceDyn
2. ROVER TEST BED
The rover test bed developed at Tohoku Universi-ty has the dimension about 350mm cube, weighs8.0 kg in total (Figures 1 and 2.) It has 6 wheel-s connected by a Rocker-Bogie type link system.Each wheel in the diameter of 90mm is original-ly for radio-controlled toys and covered with softrubber surface and small rubber spikes. Front andrear wheels have active steering DOF. Our Rocker-Bogie system uses parallel links unlike that is usedin the Pathfinder rover or other NASA’s Marsrover prototypes. In the main body, there mount-ed a Linux based computer system with a 233MHzK6 cpu (Figure 3) that communicates with a hostcomputer by wireless Ethernet link. Also mounteda H8-chip based PWM motor controller, an inde-
Figure 3: A Linux based on-board system (180mm× 120mm)
rover test bedoperator
NotePC
LinuxCard PC H8
LocalController
RS-232CData
logger
Motor Driver
Battery
Motor
Motor
tachometer
Motor
Motor
potentiometer
wirelessLAN
Figure 4: Control and measurement block di-agram
pendent data logging system, and a battery andpower supply unit.
The control and measurement system block di-agram is depicted in Figure 4. In the experimentspresented in the following section, an open loopcontrol for wheel velocities is performed along theremote command of the duty ratio for each PWMdriver. The state of the rover is monitored by thefollowing on-board sensors: each tachogeneratorfor 6 wheels, each potentiometer for 4 steering ax-es, total 4 potentiometers for the Rocker-Bogie linkstate measurement (right and left rockers, rightand left bogies.) These analog values are digitizedand recorded by an independent compact data log-ging system (Keyence NR-2000.)
Note here that the right and left rocker links areconnected so that these two links moves in a sym-metric way, like the Pathfinder rover, therefore theabove measurement is redundant. Note also thatthe rover is not equipped with an attitude sensoror an inclinometer. The orientation of the bodyis measured by an optical 3D motion tracking sys-tem in the following experiments. For this purposethere mounted four color cue markers on the top
2

of the base body.
3. EXPERIMENTS
Experiments are carried out on uneven surface ofdry sand with several rocks. In the experiments,the state variables such as wheel velocities andsuspension link angles are measured by on-boardsensors, as well as the motion of the body in theinertial frame is measured by a 3D visual track-ing system that uses a set of stereo cameras fixedto the experimental field (Figure 5). A map ofthe sand field (2m × 2.5m) is obtained by the 3Dmeasurement system as Figure 6.
Four sets of experiments are carried out in thisenvironment (Figure 7.)
EXP-1 Straight path locomotion from a flat areato a steep slope.
EXP-2 Skid steering in an almost flat area.
EXP-3 Negotiation with a single round rockwhich has a half diameter of the wheel.
EXP-4 Negotiation with several round rocks s-cattered randomly.
In EXP-1, the rover test bed is observed to looseits body velocity when it is climbing up a slope,and then stops at a certain inclination in spite thatall wheels are commanded to rotate at a constantvelocity. This yields tire slip and, finally, the ro-tating wheels dig a hole to sink themselves. Thisturns out a critical stack of the vehicle and difficultto get out.
The motion trace of the rover main body, mea-sured by the 3D camera system, is differentiatedto obtain the body velocity in the inertial framevb. The traveling velocity of each wheel vx is com-puted from the body velocity and the state of thesuspension links using a kinematic model. The cir-cumference velocity of each wheel vw is measuredby the tachogenerator, then the slip ratio of eachwheel is calculated.
Here the definition of the slip ratio s is followedby the convention in vehicle dynamics as:
s ={
(vx − vw)/vx (vx > vw : braking)(vx − vw)/vw (vx < vw : accelerating)
(1)where s is positive when the vehicle is braking andnegative when accelerating.
3D Measurement System
VideoProcessor PC
Figure 5: Test field and a 3D measurementsystem
Figure 6: Map of the test field obtained by the3D measurement system
Figure 7: A rover test bed moving on the testfield
3

0 5 10 15 20 25 30 35 40 45 500
50
100
body
vel
[mm
/sec
]
0 5 10 15 20 25 30 35 40 45 500
20
40
60
80
tire
vel [
mm
/sec
]
0 5 10 15 20 25 30 35 40 45 50-1
-0.5
0
0.5
time [sec]
slip
rat
io
Figure 8: Observation data for body veloci-ty (top), tire circumference velocity (middle),and slip ratio (bottom), when the rover testbed is climbing up an increasing slope.
An example of the data is depicted in Figure 8,in which the top is the body velocity vb, the mid-dle is one of the tire circumference velocity vw,and the bottom is the corresponding slip ratio s.In this example, the rover test bed travels straight-ly climbing up a smooth but gradually increasingslope.
It is observed that the both the body velocityand the tire velocity decrease along the slope, butin different profiles. The corresponding slip ratiois changing from near zero to minus one. FromT=11 to 23 seconds, the body seems to move ona flat floor with almost constant velocity, yieldingalmost zero or very small slip. After T=23 slopestarts and at T=35 seconds the body finally stopsdue to the excessive load, but the tire still keeprotating then yielding s = −1. At this moment,the tire digs down in the sandy surface vertically.
The physical observation and the transition pro-file of the velocities and the slip ratio are useful toinfer the tire traction model.
On the other hand, the effectiveness of therocker-bogie suspension system for bumpy terrainsis observed in EXP-4, in which the rover test bedtravels on the surface with randomly placed rock-s. Figure 9 depicts the profile of the rocker andbogie angles in one of such examples. In this casethe right side has more bumps. Note that the rightand left rockers have a symmetric profile becauseof the differential link to connect the both. Someasymmetric feature is observed due to the back-rash of the link connection.
0 5 10 15 20 25 30 35 40 45-20
0
20
0 5 10 15 20 25 30 35 40 45-20
0
20
0 5 10 15 20 25 30 35 40 45-20
0
20
0 5 10 15 20 25 30 35 40 45-20
0
20
time [sec]
link
angl
e [d
eg]
right bogie
right rocker
left bogie
left rocker
Figure 9: Observation data for rocker-bogieangles when the test bed is moving on randomstones.
4. SIMULATION MODEL
In order for better understanding of the physicalphenomena and motion dynamics of the rover loco-motion, a computer simulation model is develope-d. In the simulation, the rover system is modeledas an articulated multibody system with a movingbase.
As an input to the simulation, the motor torqueor rotational velocity of each wheel is given. To-gether with the current body velocity, the slip ratiois obtained. The traction force of tire ft is assumedas a function of the slip ratio s in such way as:
ft = fn · f(s) (2)
where f(s) is a load-traction factor, taking a valuebetween -1 and 1, and fn is the force (load) inthe direction of the surface normal. In case of acompliant tire the normal load is modeled with astiffness coefficient Kw and a damping coefficientDw :
fn = −Kwh − Dw h (3)
where h is the deformation of the tire. Once thenormal and tangent forces, fn and ft are computedat each contact point, the forward dynamics of therover as a multiple brachiating system is computedby an in-house multi-purpose simulation softwarecalled the SpaceDyn [16]. After the numerical inte-gration, the state variables such as a body velocityand link angles at a next time step are obtained,then the simulation continues by repeating the cy-cle.
It should be noted that the SpaceDyn perform-s the forward dynamic computation based on the
4

−1 −0.8 −0.6 −0.4 −0.2 00.1
0.2
0.3
0.4
0.5
0.6
slip ratio
trac
tion
forc
e co
effic
ient
Figure 10: Experimental plots and an estimatedfunction for the traction force factor v.s. the tireslip ratio
Newton-Euler formulation for a multiple link sys-tem with multiple terminal branches, on which ex-plicit forces are given. The SpaceDyn does not usea Lagrangian multiplier and free from over or un-der constraint issues. If a part of the system con-tacts a ground, we just give appropriate forces. Ifa tire jumps up, set the corresponding forces zero.
5. SIMULATION RESULTS
Once those tire traction model is identified fromthe experiments, we can simulate the motion ofthe rover on any arbitrary surface.
From a careful examination of the experimen-tal data, the load-traction factor of a given tire inthe test environment is inferred. From our exper-iments presented in Section 3, we obtain the plotsfor the traction coefficient versus the slip ratio,as shown in Figure 10. As a tentative approxima-tion, a quadratic function is estimated by the leastsquare computation. The curve of the estimatedfunction is also shown in the same figure.
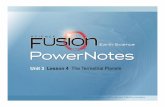
By using the procedure of dynamic simulationpresented in the previous section and this load-traction function model, the motion of the rocker-bogie type rover is simulated. As a typical exam-ple, the rover motion moving over a single bumpis depicted in Figure 11. In this simulation thetraveling velocity of the rover is set higher thanthe experimental values, in order to enhance thedynamic effect. The top graphics show that themotion of the rocker-bogie suspension is workingadaptively to the bump, as observed in experi-
ments. The bottom graphs show the time profileof the forces (normal force on left, tangent force onright) at front, middle and rear wheels. The dot-ted lines and arrows indicate the timing when thefront wheel is at the top of the bump, the middlewheel next, and finally the rear wheel. The graphscan read such that the front wheel is pushed back(negative tangent force exerted) when it is climb-ing up the bump, and the middle wheel is pushedforward (positive tangent force exerted) when therear wheel is climbing up the bump. Discontinu-ity of the graph suggests that the wheel sometimeslooses contact and flies in the air, which is observedonly by the dynamic simulation with the assump-tion of higher locomotion velocity or smaller grav-ity.
6. CONCLUSIONS ANDFUTURE WORK
In this paper, the physics and motion dynamic-s of a wheeled vehicle (rover) on uneven naturalterrains are studied. As an initial step, the experi-ments are carried out to observe the physical phe-nomena and extract a traction model from the mo-tion data profiles. The dynamic simulations are al-so developed to be compared with the experimen-tal results. An illustrative simulation shows thatthe motion of the vehicle, including the adaptiveresponse of the rocker-bogie suspension to roughterrain, is successfully modeled and simulated withthe in-house software dynamics simulator namedthe SpaceDyn.
As a future research direction, a traction controllaw to maximize the efficiency and to avoid criti-cal trap or stack should be established and tested.From a careful examination of the slip profiles ob-tained by experiments, a critical threshold valuewill be suggested. If the slip ratio exceeds this val-ue the wheel starts slipping and digging. In orderto avoid this, the wheel velocity should be regulat-ed or the load condition should be changed.
Acknowledgements
The experiments are carried out at the Robotic-s Laboratory in Tsukuba Space Center, NASDA,Japan. The authors acknowledge their specialthanks to Mr. Hiroshi Ueno and the group mem-bers for kind assistance to carry out the experi-ments. The research is supported by the Ministryof Education, Science, Sports and Culture, Grant-
5

Figure 11: Simulated rover motion moving over a bump
in-Aid for Scientific Research (B), 10044113, 2000.
References
[1] http://mars.jpl.nasa.gov/MPF/ (as of Nov. 2000)
[2] http://mars.jpl.nasa.gov/mep/missions/announce2.html (as of Nov. 2000)
[3] http://yyy.tksc.nasda.go.jp/Home/Projects/ SE-LENE/http://www.isas.ac.jp/e/enterp/missions/selene/(as of Nov. 2000)
[4] C.R.Weisbin, D.Lavery, G.Rodriguez; “RoboticsTechnology for Planetary Missions Into the 21stCentury,” Proc. i-SAIRAS’97, Tokyo, Japan, Ju-ly, 1997, pp.5–10.
[5] C.R.Weisbin,et. al.; “Autonomous Rover Tech-nology for Mars Sample Return,” Proc. i-SAIRAS’99, ESTEC, The Netherlands, June,1999, pp.1–10.
[6] Paolo Fiorini; “Ground Mobility Systems forPlanetary Exploration,” Proc. 2000 IEEE Int.Conf. of Robotics and Automation, CA, USA,April, 2000, pp.908–913.
[7] J.Aizawa,N.Yoshioka, M.Miyata, Y.Wakabayashi; “Design-ing of Lunar Rovers for High Work Performance,”Proc. i-SAIRAS’99, ESTEC, The Netherlands,June, 1999, pp.63–68.
[8] Y.Kuroda, K.KOndo, K.Nakamura, Y.Kunii,T.Kubota; “Low Power Mobility System for Mi-cro Planetary Rover Micro5,” Proc. i-SAIRAS’99,ESTEC, The Netherlands, June, 1999, pp.77–82.
[9] M.Tarokh, Z.Shiller, S.Hayati; “A Comparison ofTwo Traversability Based Path Planners for Plan-etary Rovers,” Proc. i-SAIRAS’99, ESTEC, TheNetherlands, June, 1999, pp.151–157.
[10] J. Balaram; “Kinematic Observers for ArticulatedRovers,” Proc. 2000 IEEE Int. Conf. of Roboticsand Automation, CA, USA, April, 2000, pp.2597–2604.
[11] S.Hayati, R.Arvidson; “Long Range ScienceRover (Rocky7) Mojave Desert Field Tests,”Proc. i-SAIRAS’97, Tokyo, Japan, July, 1997,pp.361–367.
[12] W.R.Whittaker, D.Bapna, M.W.Maimone,E.Rollins; “Atacama Desert Trek: A PlanetaryAnalog Filed Experiment.” Proc. i-SAIRAS’97,Tokyo, Japan, July, 1997, pp.355–360.
[13] Farritor, S., Hacot, H., and Dubowsky,S.;gPhysics-Based Planning for Planetary Explo-ration,h Proceedings of the 1998 IEEE Interna-tional Conference on Robotics and Automation:278-283, 1998.
[14] Iagnemma, K., Burn, R., Wilhelm, E., andDubowsky, S.; gExperimental Validation ofPhysics-Based Planning and Control Algorithm-s for Planetary Robotic Rovers,hProc. of theSixth International Symposium on ExperimentalRobotics, ISER ’99, 1999.
[15] Iagnemma, K., and Dubowsky, S.; gVehicleWheel-Ground Contact Angle Estimation: withApplication to Mobile Robot Traction Control,hProc. 7th International Symposium on Advancesin Robot Kinematics, ARK 00, 2000.
[16] K. Yoshida; “The SpaceDyn: a MATLAB Tool-box for Space and Mobile Robots,” J. of Roboticsand Mechatronics, vol.12 no.4, pp.411–416, 2000.
6