Motion Algorithms: Planning, Simulating, Analyzing Motion of Physical Objects Jean-Claude Latombe...
36
Motion Algorithms: Motion Algorithms: Planning, Simulating, Analyzing Planning, Simulating, Analyzing Motion of Physical Objects Motion of Physical Objects Jean-Claude Latombe Computer Science Department Stanford University
-
date post
21-Dec-2015 -
Category
Documents
-
view
233 -
download
0
Transcript of Motion Algorithms: Planning, Simulating, Analyzing Motion of Physical Objects Jean-Claude Latombe...

Motion Algorithms:Motion Algorithms:Planning, Simulating, Analyzing Planning, Simulating, Analyzing
Motion of Physical ObjectsMotion of Physical Objects
Jean-Claude Latombe
Computer Science DepartmentStanford University

About Myself
Born a long time ago in South-East of France
Pernes-les-Fontaines

About MyselfAbout Myself
Born a long time ago in South-East of France
Studied in Grenoble(Eng. EE, MS EE, PhD CS 1977)
CS Professor, Grenoble (1980-84)
CEO, ITMI (1984-87)
Stanford (1987-…)
Research InterestsResearch Interests
1980-84: Artificial Intelligence, Computer Vision, Robotics
1987-92: Robot Motion Planning 1993-98: Motion Planning 1998-…: Motion Algorithms


Fundamental QuestionFundamental QuestionAre two given points connected by a path?

How Do You Get There?How Do You Get There?
?

How Do You Get There?How Do You Get There?
Problems:• Geometric complexity• Space dimensionality

Increasing ComplexityIncreasing Complexity
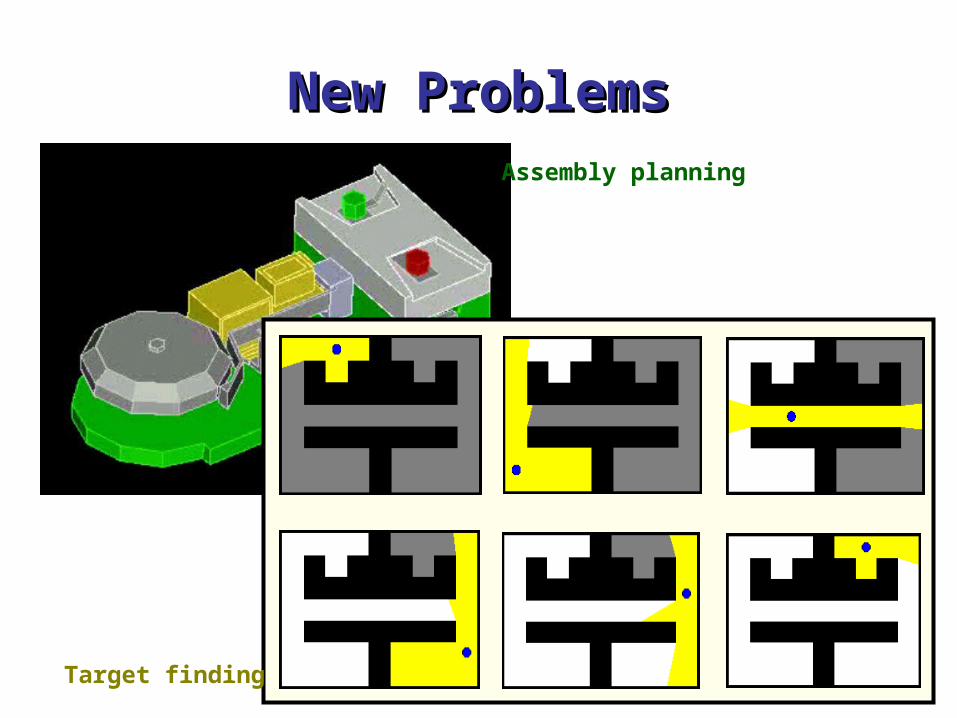
New ProblemsNew ProblemsAssembly planning
Target finding

From Simulation to Real RobotsFrom Simulation to Real Robots

Space RobotsSpace Robots
air bearing
gas tank
air thrusters
obstacles
robot

Modular Reconfigurable Modular Reconfigurable RobotsRobots
Xerox, ParcXerox, Parc
Casal and Yim, 1999


Humanoid RobotHumanoid Robot[Kuffner and Inoue, 2000] (U. Tokyo)
Stability constraints

RadiosurgeryRadiosurgery

From Robots to Other Agents: From Robots to Other Agents: Digital ActorsDigital Actors

Simulation of Deformable Simulation of Deformable ObjectsObjects

Study of Molecular MotionStudy of Molecular Motion
Ligand bindingProtein folding

Basic Tool: Configuration SpaceBasic Tool: Configuration Space
Approximate the free space by random sampling
Probabilistic Roadmaps
[Lozano-Perez, 80]
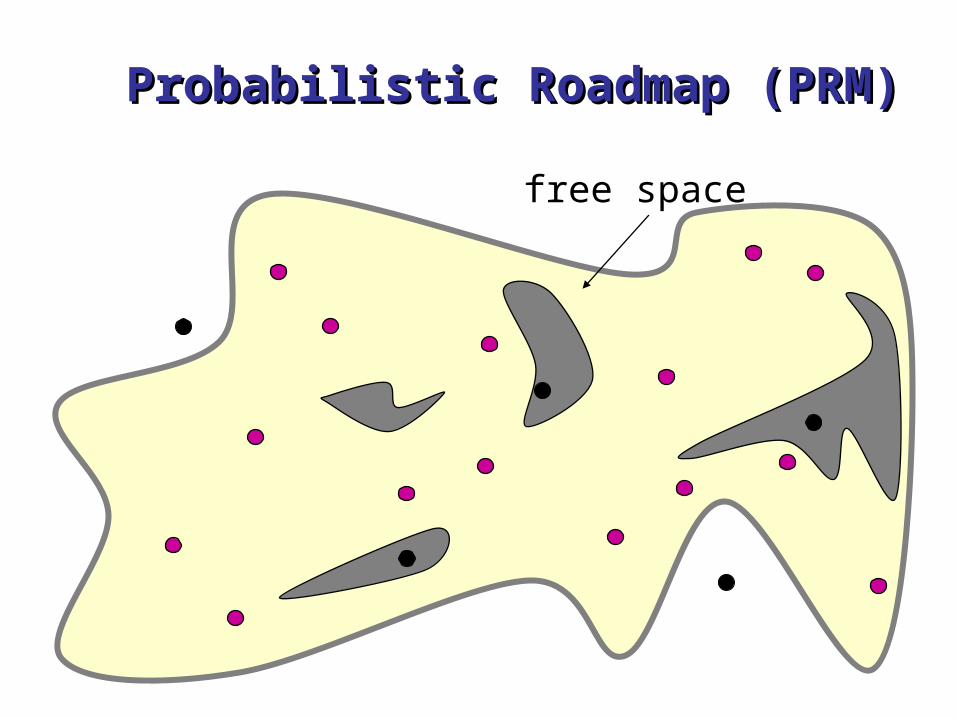
Probabilistic Roadmap (PRM)Probabilistic Roadmap (PRM)
free space

Probabilistic Roadmap (PRM)Probabilistic Roadmap (PRM)
free space
mmbb
mmgg
milestone
local path
First Assumption of PRM First Assumption of PRM PlanningPlanning
Collision tests can be done efficiently.
[Quinlan, 94; Gottschalk, Lin, Manocha, 96]
Several thousand collision checks per second for 2 objects of 500,000 triangles each on a 1-GHz PC
ProblemProblem

Exact Collision Checking Exact Collision Checking of Path Segmentsof Path Segments
• Idea: Use distance computation in workspace rather than pure collision checking
D = 2Lx|dq1|+L|dq2| 3Lxmax{|dq1|,|dq2|}
d
q1
q2
If D d then no collision

Exact Collision Checker in Exact Collision Checker in ActionAction
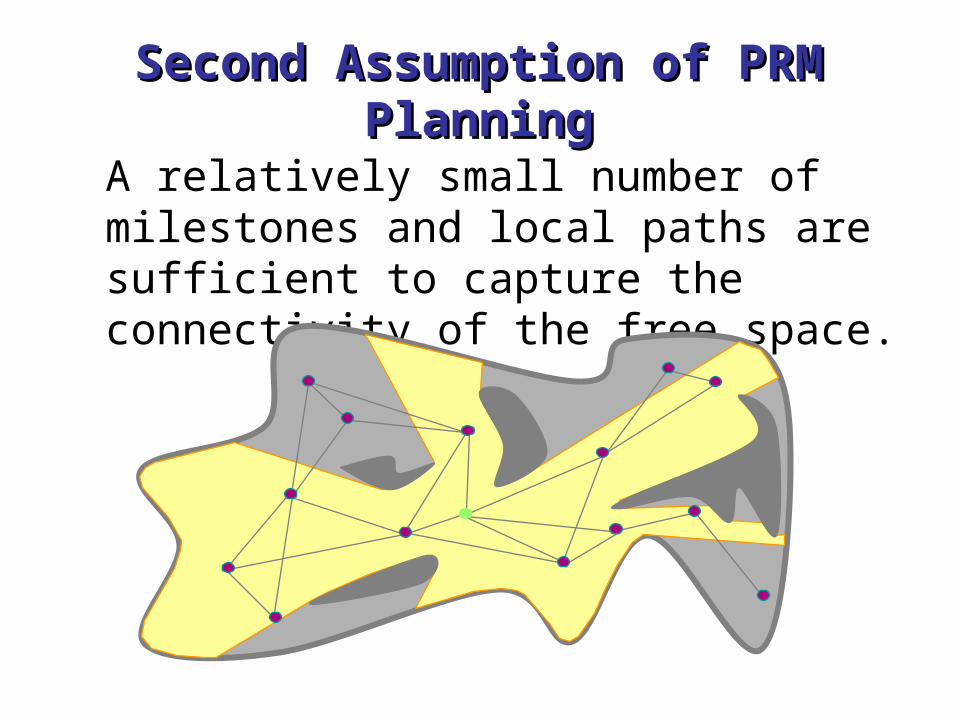
Second Assumption of PRM Second Assumption of PRM PlanningPlanning
A relatively small number of milestones and local paths are sufficient to capture the connectivity of the free space.
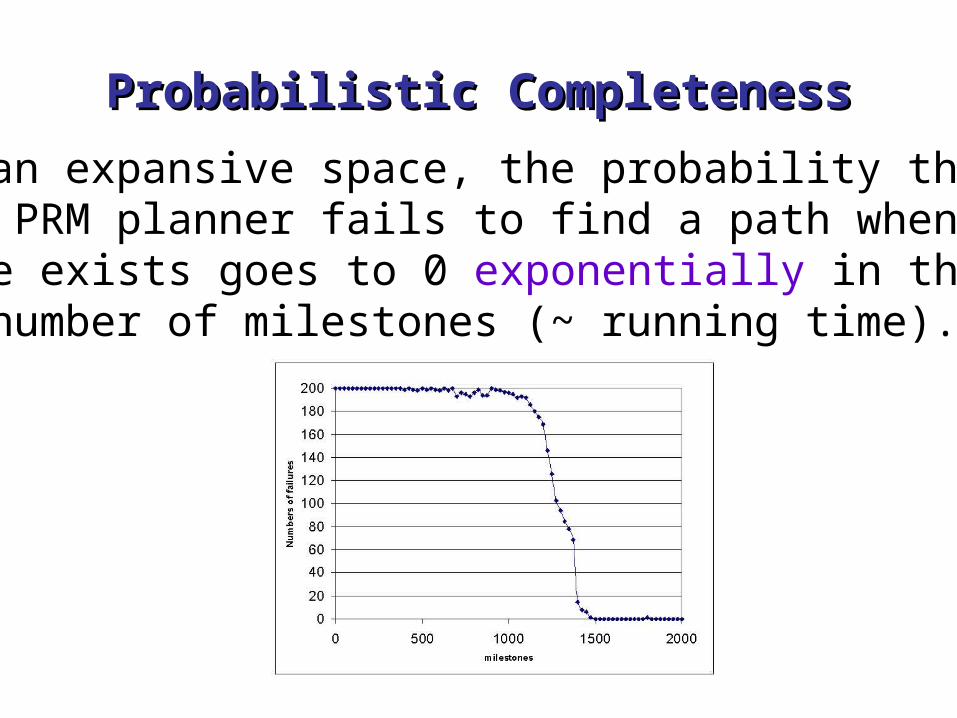
Probabilistic CompletenessProbabilistic Completeness
In an expansive space, the probability that a PRM planner fails to find a path when
one exists goes to 0 exponentially in the number of milestones (~ running time).
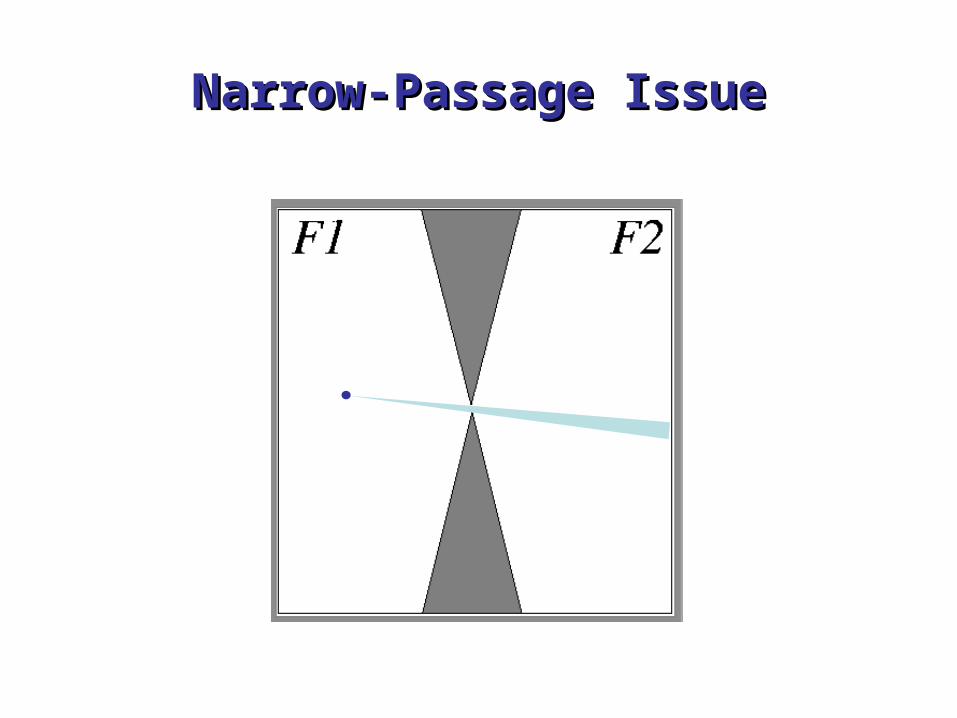
Narrow-Passage IssueNarrow-Passage Issue
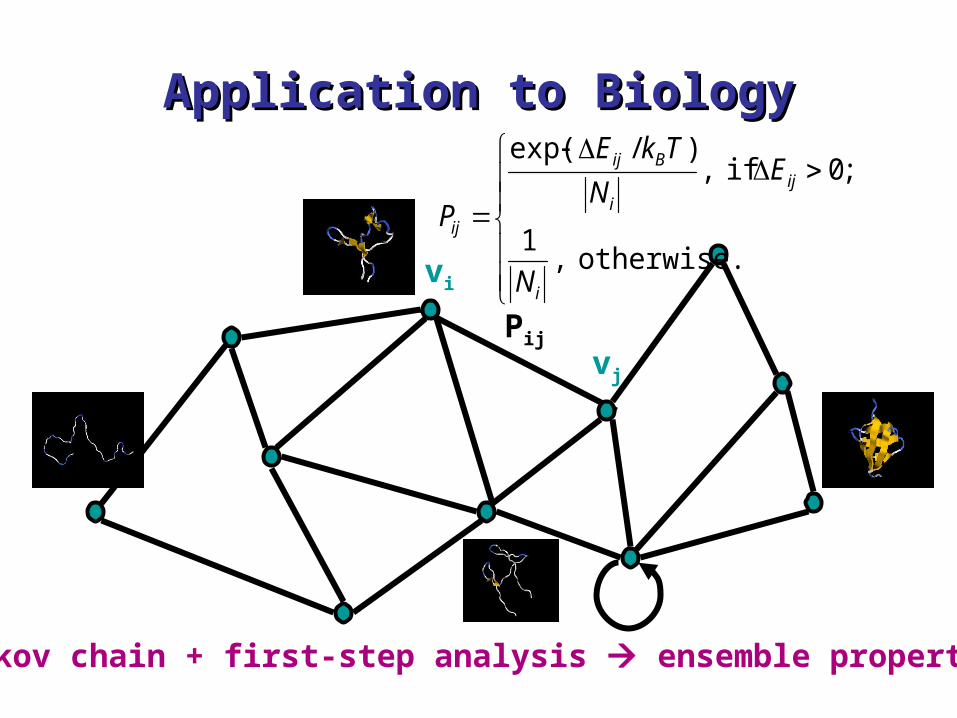
Application to BiologyApplication to Biology
vi
vj
Pij
otherwise. ,
1
;0 if ,)/exp(
i
iji
Bij
ij
N
EN
TkE
P
Markov chain + first-step analysis ensemble properties
Current ProjectsCurrent Projects
Robot motion planningFunding: General Motors, ABBCollaborator: Prinz (ME), Rock (AA)Study of molecular motions (folding, binding)Funding: NSF-ITR (with Duke and UNC), BioXCollaborators: Guibas (CS), Brutlag (Biochemistry), Levitt (Structural Biology), Pande (Chemistry), Lee (Cellular B.)Surgical simulation (deformable tissue, suturing, visual and haptic feedback)Funding: NSF, NIH, BioXCollaborators: Salisbury (CS+Surgery), Girod (Surgery), Krummel (Surgery)Modeling and simulation of deformable objectsFunding: NSF-ITR (with UPenn and Rice)Collaborators: Guibas (CS), Fedkiw (CS)

Pakistan Afghanistan Tadjikistan
Cho-Oyu, 8200m, ~27,000ft (Tibet)
Muztagh Ata, 7,600m, 25,000ft (Xinjiang, China)
Third Pillar of Dana(California)
Thailand

Rock-Climbing RobotRock-Climbing Robot
With Tim Bretl and Prof. Steve Rock

Half-Dome, NW Face, Summer of 2010 …
Tim Bretl