
Modélisation pour la simulation de l'intégration verticale et virtuelle ...

Modélisation des interactions vagues / solide
Stéphane Abadie
Contribution : C. Mokrani (post-doc), B. Ducassou (doc), M. Roboam (M1)

ISABTP
Campus Montaury - Anglet
SIAME EA 4581 – IPRA
Equipe Mécanique (17 EC) Groupe IVS

13 Octobre 2014 Groupe de travail Math-Océan 3
1. Introduction

13 Octobre 2014 Groupe de travail Math-Océan 4
1. Introduction1.1 Positionnement du problème
Interface complexe
Solide fixe
eau
air

13 Octobre 2014 Groupe de travail Math-Océan 5
1. Introduction1.1 Positionnement du problème
Ω
FiM i
solide mobileInterface complexe
Torseur externe

13 Octobre 2014 Groupe de travail Math-Océan 6
1. Introduction1.2 Applications : Houlomoteur
Colonne d'eau oscillante Houlomoteur Système Oyster (Aquamarine)

13 Octobre 2014 Groupe de travail Math-Océan 7
1. Introduction1.2 Applications : Sollicitations/survivabilité
Blocs mobiles ?
Digue verticale Digue à talus Houlomoteur Mutrilu

13 Octobre 2014 Groupe de travail Math-Océan 8
1. Introduction1.2 Applications : Tsunamis

13 Octobre 2014 Groupe de travail Math-Océan 9
1. Introduction1.2 Applications : Tsunamis
Transport de structures et débris
Potentiel d'évènements historiques

13 Octobre 2014 Groupe de travail Math-Océan 10
1. Introduction1.2 Applications : Tsunamis
Tsunamis générés par glissement de terrain

13 Octobre 2014 Groupe de travail Math-Océan 11
1. Introduction1.2 Applications : Ballottement
Atténuation de la résonance

13 Octobre 2014 Groupe de travail Math-Océan 12
2. Le modèle numérique

13 Octobre 2014 Groupe de travail Math-Océan 13
2. Le modèle numérique2.1 Généralités
● Développé à l'I2M Bordeaux depuis 20 ans● Solveur Navier-Stokes multifluide● Vitesse/pression sur grille décalée● Volumes finis● Lagrangien augmenté ou projection● VOF● Parallèle MPI

13 Octobre 2014 Groupe de travail Math-Océan 14
2. Le modèle numérique2.2 Navier-Stokes multifluide & domaines fictifs
ρ(M )(∂U∂ t
+(U⋅∇)U )+Bu(U−U∞)+μUK
=ρ(M ) g−∇ P+∇ ((μ(M )+μT (M ))(∇ U+∇ t U ))
∇⋅U=0
slide ,
slide
air
, air
water
, water
M
Densité : Moyenne arithmétique
Viscosité : Moyenne harmonique ?
Formulation Brinkman
Poreux ou solide fixe
RANS ou LES (mixte)Terme de pénalisation (CL ou interne)

13 Octobre 2014 Groupe de travail Math-Océan 15
2. Le modèle numérique2.3 Méthode VOF
F=0.5
F=1
F=0.03 F=0
F=0F=0.5
F=0.5F=0.85F=1
PLIC
∂ f∂ t
+∇ (a∇ f )=0
Pianet et al., 2010
Épaisseur de régularisation

13 Octobre 2014 Groupe de travail Math-Océan 16
3. Interaction vague/solide mobile

13 Octobre 2014 Groupe de travail Math-Océan 17
3. Interaction vague / solide mobile3.1 Position du problème
Ω
FiM i
solide mobile
Torseur externe
Champ de vagues C
Centre de rotation
1. Problème de l'interaction

13 Octobre 2014 Groupe de travail Math-Océan 18
3. Interaction vague / solide mobile3.2 Méthode de pénalisation par la viscosité
Ω
Maillage externe à
∬S
P n dS=m γS

13 Octobre 2014 Groupe de travail Math-Océan 19
3. Interaction vague / solide mobile3.2 Méthode de pénalisation par la viscosité
Ω
Maillage déformable !

13 Octobre 2014 Groupe de travail Math-Océan 20
3. Interaction vague / solide mobile3.2 Méthode de pénalisation par la viscosité
Ω
Domaines fictifs
Navier-Stokes Navier-Stokes + pénalisation

13 Octobre 2014 Groupe de travail Math-Océan 21
3. Interaction vague / solide mobile3.2 Méthode de pénalisation par la viscosité
Ω
ρ(∂U∂ t
+(U⋅∇)U )=ρ g−∇ P+∇(μ(∇ U+∇ t U))
∞
Si résolution converge
0 !Contrainte de
rigidité

13 Octobre 2014 Groupe de travail Math-Océan 22
3. Interaction vague / solide mobile3.2 Méthode de pénalisation par la viscosité
● Ritz (1998), Abadie et al. (2010), Vincent et al., (2014)
● Mouvement solide autorisé (translation et rotation)
● Interaction « naturelle » (pas de calcul de P à l'interface)
● ~ 105-1010 Pa.s
Ω
ρ(∂U∂ t
+(U⋅∇)U)=ρ g−∇ P+∇ (μ(∇ U+∇ t U))
0 !

13 Octobre 2014 Groupe de travail Math-Océan 23
3. Interaction vague / solide mobile3.2 Méthode de pénalisation par la viscosité
● Critère de rigidité ?
- borne sup taux déformation local
- paramètre de contrôle
● =5.107
→ D <10-3
Ω
M
E (M )=√(ϵI (M )2+ϵII (M )2)
D=∫t=0
t simul
maxΩ(E (M ))dt

13 Octobre 2014 Groupe de travail Math-Océan 24
3. Interaction vague / solide mobile3.2 Méthode de pénalisation par la viscositéExemples d'application : tsunamis généré par un glissement rigide
t=0.5s t=1 s
Vertical Slide displacement
t=0.5s

13 Octobre 2014 Groupe de travail Math-Océan 25
3. Interaction vague / solide mobile3.2 Méthode de pénalisation par la viscositéExemples d'application : tsunamis généré par un glissement rigide
Abadie et al., CENG, 2010.

13 Octobre 2014 Groupe de travail Math-Océan 26
3. Interaction vague / solide mobile3.3 Torseur des forces extérieures
Rappel + amortissement
Torseur externe ponctuel
∫Ω
f dΩ≡R
∫Ω
OM ^ f dΩ≡M
Pour un solide rigide :
??

13 Octobre 2014 Groupe de travail Math-Océan 27
3. Interaction vague / solide mobile3.3 Torseur des forces extérieures
ρ(∂U∂ t
+(U⋅∇)U )+Bu(U−U∞)=ρ g−∇ P+∇ (μ(∇ U+∇ t U ))
Rappel + amortissement
Ω
f e
Rappel + amortissement
Torseur externe ponctuel
∞0 !
+ f e

13 Octobre 2014 Groupe de travail Math-Océan 28
3. Interaction vague / solide mobile3.3 Torseur des forces extérieuresMouvement en translation
ρ(∂U∂ t
+(U⋅∇)U )+Bu(U−U∞)=ρ g−∇ P+∇ (μ(∇ U+∇ t U ))+ f e
f e=−1Ω (k x+ν x ) x
x (t )=∫Ω
u(M , t)dΩ
x (t )=x0+∫t0
t
u(M ,t )dt

13 Octobre 2014 Groupe de travail Math-Océan 29
3. Interaction vague / solide mobile3.3 Torseur des forces extérieuresMouvement en translation
Sous critique
critique
Comparaison THETIS / eqt diff + runge Kutta

13 Octobre 2014 Groupe de travail Math-Océan 30
3. Interaction vague / solide mobile3.3 Torseur des forces extérieuresMouvement en translation – Application : atténuation du sloshing

13 Octobre 2014 Groupe de travail Math-Océan 31
3. Interaction vague / solide mobile3.3 Torseur des forces extérieuresMouvement en translation – Application : atténuation du sloshing
Projet ECOS – SUD en cours d'analyse ...

13 Octobre 2014 Groupe de travail Math-Océan 32
3. Interaction vague / solide mobile3.3 Torseur des forces extérieuresMouvement en translation – Application : atténuation du sloshing
13 Octobre 2014 Groupe de travail Math-Océan 33
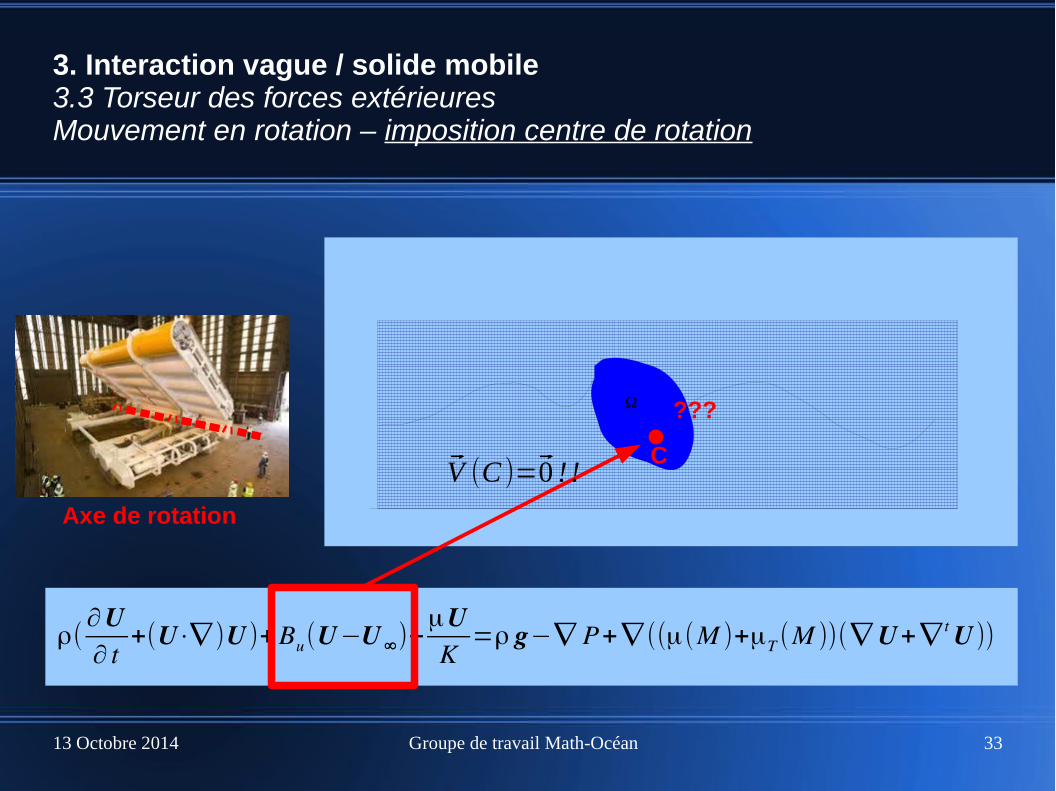
3. Interaction vague / solide mobile3.3 Torseur des forces extérieuresMouvement en rotation – imposition centre de rotation
Ω
Axe de rotation
C
???
ρ(∂U∂ t
+(U⋅∇)U )+Bu(U−U∞)+μUK
=ρ g−∇ P+∇((μ(M )+μT (M ))(∇ U+∇ t U ))
V (C )=0 ! !

13 Octobre 2014 Groupe de travail Math-Océan 34
3. Interaction vague / solide mobile3.3 Torseur des forces extérieuresMouvement en rotation
Rappel + amortissement Mvt en rotation
Fv (M ) = Fv t(M ) + Fv r(M )= [− k x .δx − c x . δ x
− k y .δ y − c y . δ y
0 ] + [−
γ .θrot .sin (θM)
rM
− c . ˙θrot . sin (θM )
rM
− γ .θrot . cos(θM)
rM
− c . ˙θrot . cos(θM)
rM
0]
¯θrot = ∑nM
√δx (M )² + δ y (M )²
RM
nM
θrot = θinit + ¯θrot .δ t

13 Octobre 2014 Groupe de travail Math-Océan 35
3. Interaction vague / solide mobile3.3 Torseur des forces extérieuresMouvement en rotation

13 Octobre 2014 Groupe de travail Math-Océan 36
3. Interaction vague / solide mobile3.3 Torseur des forces extérieuresMouvement en rotation
Rappel Rappel + amortissement
Comparaison THETIS / eqt diff + runge Kutta

13 Octobre 2014 Groupe de travail Math-Océan 37
3. Interaction vague / solide mobile3.3 Torseur des forces extérieuresMouvement en rotation
Projet EMACOP : étude rendement = f(k,c) et survivabilité système Oyster

13 Octobre 2014 Groupe de travail Math-Océan 38
4. Pressions générées par le déferlement sur un obstacle fixe

13 Octobre 2014 Groupe de travail Math-Océan 39
4. Impact du déferlement sur un obstacle fixe4.1 Position du problème – Engineering
Quelles sont les sollicitations sur la structure ??
Dimensionnement des structures (Digues, EMR, etc...)
13 Octobre 2014 Groupe de travail Math-Océan 40
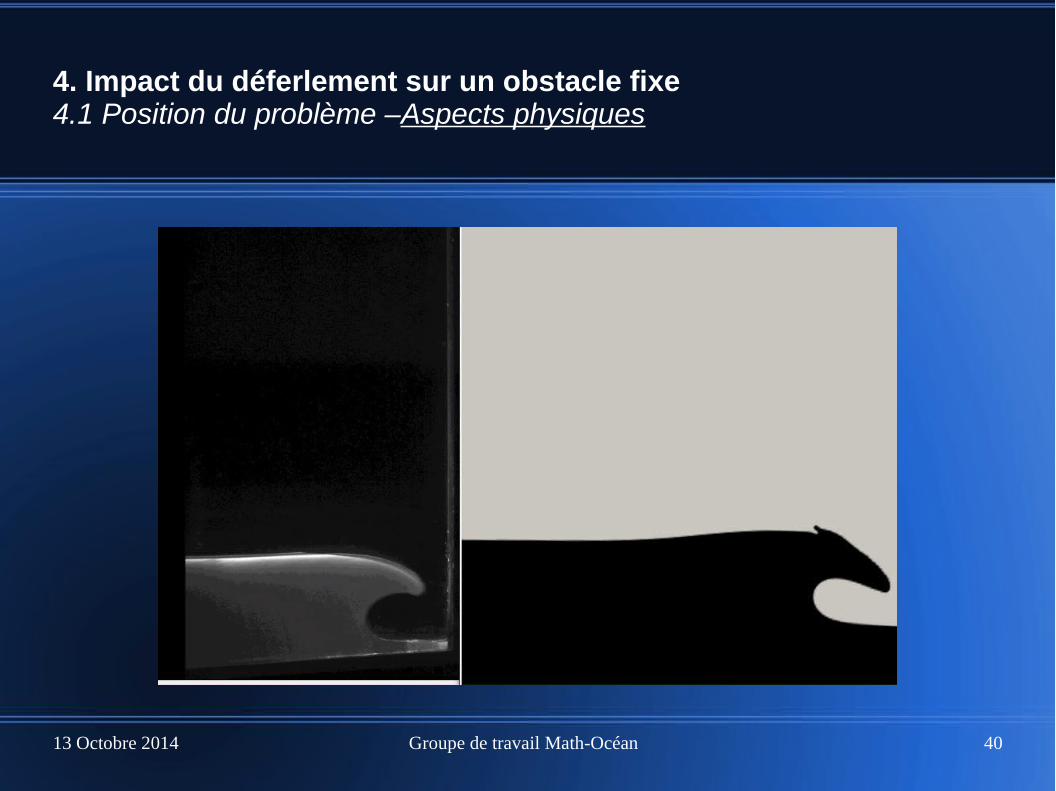
4. Impact du déferlement sur un obstacle fixe4.1 Position du problème –Aspects physiques

13 Octobre 2014 Groupe de travail Math-Océan 41
4. Impact du déferlement sur un obstacle fixe4.1 Position du problème –Aspects physiques
Air piégé
Effet de surface libre
Air dissous (compressibilité)
Pressions instantanées chaotiques
Impulsion de pression stable
(cf. Cooker & Peregrine)

13 Octobre 2014 Groupe de travail Math-Océan 42
4. Impact du déferlement sur un obstacle fixe4.2 Impacts faciles …. cas du soliton

13 Octobre 2014 Groupe de travail Math-Océan 43
4. Impact du déferlement sur un obstacle fixe4.3 Jet triangulaire

13 Octobre 2014 Groupe de travail Math-Océan 44
4. Impact du déferlement sur un obstacle fixe4.3 Jet triangulaire

13 Octobre 2014 Groupe de travail Math-Océan 45
4. Impact du déferlement sur un obstacle fixe4.3 Jet triangulaire

13 Octobre 2014 Groupe de travail Math-Océan 46
4. Impact du déferlement sur un obstacle fixe4.3 Jet triangulaire
=70°, rôle de la régularisation de phase

13 Octobre 2014 Groupe de travail Math-Océan 47
4. Impact du déferlement sur un obstacle fixe4.3 Jet triangulaire
From Lugni et al. 2006
Validité de la Condition limite
P=cste à la surface libre ??
Où est la réalité ??
13 Octobre 2014 Groupe de travail Math-Océan 48
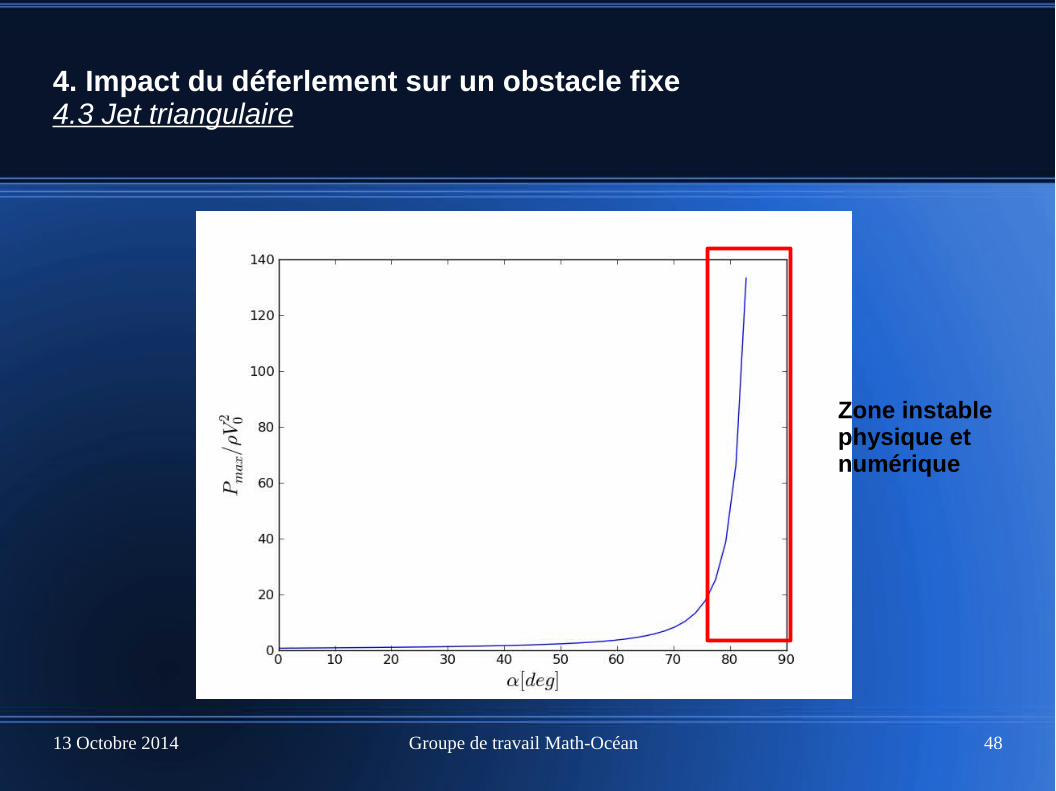
4. Impact du déferlement sur un obstacle fixe4.3 Jet triangulaire
Zone instable physique et numérique

13 Octobre 2014 Groupe de travail Math-Océan 49
4. Impact du déferlement sur un obstacle fixe4.4 Conséquences
??

13 Octobre 2014 Groupe de travail Math-Océan 50
4. Impact du déferlement sur un obstacle fixe4.4 Conséquences

13 Octobre 2014 Groupe de travail Math-Océan 51
4. Impact du déferlement sur un obstacle fixe4.5 Analogie du jet triangulaire










![[Progettazione curricolare verticale ] · [Progettazione curricolare verticale ] [2012-2013] 2 “The object of education is to ... della scuola primaria e della scuola secondaria](https://static.fdocuments.us/doc/165x107/5c6627ba09d3f2c14e8ba860/progettazione-curricolare-verticale-progettazione-curricolare-verticale.jpg)







