The Simulation Study of Sensor Less Control for IM Drives Based on MRAS
Upload
felipepalmeiroCategory
view
230download
2description

Pergamon Mech. Mach. Theory Vol. 30, No. 6, pp. 929-942, 1995
Copyright © 1995 Elsevier Science Ltd 0ID4-114X(95)00008-9 Printed in Great Britain. All rights reserved
0094-114X/95 $9.50 + 0.00
M O D E L I N G A N D S I M U L A T I O N O F S E L F - L O C K I N G D R I V E S
A. A. OLI~DZKI Warsaw University of Technology (Politechnika ITLiMS), 00-663 Warsaw,
AI. Niepodleg[o~ci 222, Poland
(Received 7 February 1992; in revised form 24 October 1994; received for publication 7 February 1995)
Abstract---Classification of self-locking drives of any kind is described and a physical model of a self-locking kinematic pair, common for all them is proposed, together with a mathematical model suitable for computer simulation purposes. That model was used in a typical kinematic chain of a drive and dynamic behaviour studied on an example of a servomechanism driven by an electric d.c. motor. Four different drives (worm gears, crossed helical gears, screw drives and twinworm gear) were studied and selected results of simulation are presented in this paper.
1. I N T R O D U C T I O N
Recent development of computer simulation techniques caused my return to old problems which I was not able to solve satisfactorily in the past ([1-3]) mostly because of a lack of proper computational tools. First attempt to model a self-locking kinematic pair in application to high efficiency twinworm drive (invented more than 30 years ago by B. Popper [4, 5]) was presented during the VIII IFToMM Congress [6].
In this paper a more universal and improved model of such a pair is presented. It may be used in any kind of a self-locking drive, thus necessity for a kind of classification arises. There is no sufficient classification of self-locking drives in books on gears (cf. [7-9]). And so an attempt to classify self-locking gears is given in Section 2. Efficiency formula needed generalization (Section 3) since different authors are proposing it different variants.
One of the examples concerns here again the bright idea of B. Popper's high efficiency self-locking gears (twinworm drive)---the only up to now known self-locking drive with the theoretical efficiency up to 90%. Together with D. W. Pessen they described (1960) several models with practical applications and derived basic equations for a new drive. Later only N. P. Chironis (1965)--as far as it is known to me--included their results in his book (pp. 170-171). From that time it is hard to find any other information in the technical literature about the fate of this invention. Simulation techniques at the time when twinworm drive was invented were not as advanced as they are now. Thus, the evaluation of dynamic properties of a new drive by simulation was rather difficult. An attempt to evaluate that drive in comparison with classical drives is described in Section 7.
2. C L A S S I F I C A T I O N OF SELF-LOCKING DRIVES
There are four possible cases of drives. They are described in Table 1. Gears in self-locking drives might be with the same and/or different hands of helices. Assuming
two helical racks in mesh (case 4), one can obtain 8 different configurations of a drive consisting of a left-handed, with fixed lead angle ~1, lower rack (driver) and an upper rack (follower) with hand and lead angle ~b2 depending on the value of shaft angle ~. Pitch planes of both racks move along x axes. Axes z indicate eventual axes of rotation in cases, when radius of pitch cylinder becomes finite.
Configuration 1 in Fig. 1 is initial. Axes x and z are parallel and shaft angle ~ equals 0. For all the remaining configurations shaft angle u increases up to 180 °.
All eight configurations (configuration 9 is equivalent to configuration 1) are described in Table 2 and extended on cases with finite values of pitch radii r.
929

930 A.A. Ol~dzki
Table 1. Classification of self-locking drives
Kind of motion Radius of pitch cylinder Case No. driver follower r I r 2
1 rotary rotary finite finite 2 rotary translatory finite infinite 3 translatory rotary infinite finite 4 translatory translatory infinite infinite
Let us return now to Table 1 and discuss all four cases. Case 1. This is the case of worm gears and/or crossed helical gears. Most common drives are
with shaft angle ~ = 90 °. The other values of ~ might be used here, but they are seldom encountered in practice. The only exception concerns the case, when ~ is made very small on purpose, like in the twinworm drive of Popper.
Case 2. Very practical case of the screw drivers. Case 3. Might be used in hydraulic and/or pneumatic drives. It is theoretically possible but
rather with not so many practical applications. Case 4. Like case 3. In both cases the idea of Popper might be used. In all four cases there is a self-locking kinematic pair present. The common model of such a pair
will be described in Section 4.
3. BASIC K I N E M A T I C AND DYNAMIC F O R M U L A S
Denoting by v~ and v2 velocities of a mesh point along the axes xt and x2, respectively (Figs 1 and 2) one has velocity ratio
v2/v ) = sin t,b)/sin ~b 2 = a (1)
(the same ratio concerns accelerations and displacements). Relative (sliding) velocity equals
sin(q~2 T- ~b, ) (2) v21 = vl sin q~2
with upper sign for the opposite hands, and lower sign for the same hands. It is obvious from (2) that gears with the same hands will have much higher sliding velocity, for the same values of ~b, and ~b2, than gears with the opposite hands.
If external forces at the mesh point of racks (Fig. 2) are Pra long x~, and P2 (P2 < 0)-along x2, then their ratio equals
sin(~b 2 4- p') P2/P, = (3)
sin(q~t + p')
and this ratio multiplied by ratio (1) gives efficiency for any drive
1 + g ' / tan 4~2 (4) r /= 1 + kt'/tan ~b~
where tan p ' = g ' = g/cos ~,--reduced coefficient of friction; ~,--pressure angle in the normal direction of the rack. Upper signs in (3) and (4) are for the opposite hands, and lower signs for the same hands of rack.
4. M A T H E M A T I C A L M O D E L OF T H E R I G I D S E L F - L O C K I N G K I N E M A T I C P A I R
In all the cases described in Table I a common self-locking kinematic pair is present. In many practical cases its rigid physical model might be used. Such a model will be described first.
Two basic opposite-hands elements of the positive-motion kinematic pair with the linear displacement are depicted in Fig. 2. Backlash here, for the sake of simplicity, is not taken into account but the two links may contact each other on side A or on the B. Lead angles of the two elements are denoted ~b~ and q52.

Self-locking drives 931
03
I ra. za
" - - . j
,C l -
I: S:4-L [ i
. ~ zl
®
X I
® ~z a
®
1800 ,,,
~z t
ze
Fig. 1. Hands of helices for the shaft angles between 0 and 180°; helices: " R " - - r i g h t hand, "L"- - l e f t hand.
Table 2. Configuration o f drives
Follower Configuration Shaft Description o f the possible
in Fig. 1 angle ~ Hand Lead angle drive; (remarks)
1 2 OI - - 02 Opposite
(right here)
3 Spur gear
4
5 - (O~ + 4)2)+ 180° The same (left here)
6
7
8 (4)t - 02) + 180° Opposite
O: = 4)t Regular helical gears Crossed helical gears;
O~ < • 2 < 90 ° twinworm drive
• = 90 ° (Further increase o f causes change of hand)
Worm gears; crossed @l < 02 < 90° helical gears
Regular worm and/or 02 = 90 ° - Ot crossed helical gears;
screw drives 0 < @ 2 < 90 ° - 0~ (High sliding velocity)
(Border case; increase • 2 = 0 of ~ changes hand)
Crossed helical gears 0 < 4) 2 < • t twinworm drive
MMT 30/6~L

932 A. A. Oklxlzki
,)//////////)//,iC-> ~ ._ ~ ~ \
,
' - - - ~'ide ~ ~ / /
(1 ~ / / / / / / / / / ~ / ] / / / / / / z Fig. 2. Self-locking kinematic pair.
4.1. Dynamics
For external forces P1 and P2 acting upon elements 1 and 2, respectively, contact is at side B when
am2P1 - ml P2 > 0 (5)
else contact is at A (for the straight and reverse motion) m~ and m2 denote masses of the two elements.
A simplified free-body diagram of the driving and driven link is shown in Fig. 3(a) for contact at B and in Fig. 3(b) for contact at A. All the diagrams presented here are in exaggerated form which the assumption of self-locking: 4~ < p ' (but ~b 2 > p') where p ' denotes angle of friction. Absolute value of the reaction R2~ for velocity 2 > 0 (condition of the straight motion) can be found in the form
= [ am2 Pl - ml P2 R21
am2 sin(p; ~ ~ i ~ ~ sin(~b2 _+ P') (6) [
upper signs are here for contact at B and lower signs for contact at A. The projection of R2t upon x~ axis: xl R2t is always negative for the both cases---contact at B or contact at A- -and equals
xlRn = - R n sin(p' +_ ~bl).
Acceleration of the member 1, 5~ can be found from the following formula
5~, = (P, + .~, R2, )/m, (7)
(a) (b) Nol~2
P.-m. ~. % y" z P.-m.~. l \
I ~ x a ~- ~1 ,e~, ¢~ . I ¢,,-v'/C"~ \ \ c , , ~ - ' ~ r~ol l "//'~p/4",//F/////" Pz-- m 2 ~t 2 ~///,"/,e/,'¢~
~ P ~ P~ r n ~ \
/
x(
Fig. 3. The system of forces acting on self-locking kinematic pair (straight motion; x~ > 0, P2 > 0). (a) Contact at side B; (b) contact at side A.

Self-locking drives 933
and bearing normal reactions (friction in bearings neglected) from formulas
N0~ = + R21 cos(p' + 4'1); N02 = + R21 cos(4,2 + p') (8)
Reverse motion of the kinematic pair takes place when velocity of the member 1 is negative and in the conditions of the steady state of motion the external force P2 remains negative. The self-locking property of the kinematic pair causes then that external force P~ must be negative also and so the positive work must be done on the driving link. Expression for R2~ for the reverse motion is
J am2 Pl - m l P2 R2, = _ am2 s i n ( p - - r ~ ~ ~ ~ sin(~b2 -T- P') (9)
Here again, upper signs are for contact at B and lower signs for contact at A. Comparison between equations (6) and (9) shows that identical expressions were interchanged now.
For a steady state conditions of s t ra igh t and/or rever se motion the contact is at side B. The change of sides--from B to A--takes place when the external forces are changing
temporarily their signs. Equations (6), (8) and (9) are valid in the case when the velocities of the two members are
different from zero. It holds true when the following conditions written in the form convenient for the future computer program are fulfilled
or
[(sign PI = sign 1'2) and (IPll ~> IP2 Isin(po- ~ )/sin(~b2- Po)]
[(sign P, = - s i g n / 2 ) and (IP, [/> IP2 Isin(p0 + ~b~ )/sin(~b2 + P0)] (lO)
where Po > P' denotes angle of static friction. When conditions (10) are not fulfilled then :~ = x2 = 0 and temporary stop takes place. Direction
of kinematic pair's motion after such a stop will depend on the side of contact and relations between Pl and P2. It will be in the positive direction of x~ axis when first condition (10) takes place for contact at A and second for contact at B (both for Pt > 0). Otherwise it will be in the negative direction of x~ axis.
5. S I M U L A T I O N S OF A R I G I D P A I R ALONE
Before the application of the model in more complex systems test simulations were performed first on the computer in order to check if its performance is satisfactory. It was assumed in those
' tests that force P2 is negative and constant and the driving force Pt (positive) is produced by a spring attached to member 1 whose free end moves with a constant velocity ~ > 0 (cf. Fig. 2).
Interesting phenomena were observed during those tests, and some selected results are presented in Fig. 4. For both straight and reverse motion of the rigid pair, a "stick-slip" phenomenon took place and oscillations of velocity and spring force occurred (zero values including). They were accompanied by changes in the contact side (B or A).
6. MODEL OF THE PAIR WITH THE ELASTIC CONTACT
Although it sounds curious, the modeling of self-locking kinematic pairs, where elasticity at contact point between two members is taken into account, is much easier than modeling of a rigid pair.
Modified model (cf. Fig. 2) of a pair is depicted in Fig. 5 where massless element 3 and two linear elements--stiffness kz2 and dash-pot c~2--are introduced. Displacement of member 3 is now Xl2 = a x j . Projection of reaction J~12 upon x2 axis, x2Rt2, may be calculated from the formula
x2R12 = k l2 (ax l -- X2) + cl2(aYcl -- x2) (12)

934 A.A. Ol~dzki
0
0
0
t%l
0
0
J O.O
~(a) ]
/ / _/ // / , [
1
~ / ~ ~ v J ~,, I time; scc
a
0.4 0.8
/~II/AI I/A/I~1 /l/Ill I/I fill AIII/ l lllllllltllllll\ll I IUIIVIIIVII \V
I.~ V
(b) l A ,,\
° X'S" ~ o \ \ ~, \ \ o
e \ \ , ~
1.2
\ ~r
\ V
\ \
0
s
0
s, 0 "
0 0
time; s ~ :ssp
0.0 0.4 0.8 :1.2
Fig. 4. Results of test simulations for a rigid pair: 1---displacement (5s; m); 2--velocity (10v; m/s); 3----spring force (F/5: N); 4--side B, 5--side A. (a) Straight motion, (b) reverse motion (values of parameters: P2 = - 8 5 N, m I = 0.5 kg, m2 = 1 kg; stiffness of the spring k = 1000 N/m, velocity of the
spring's end + 1 m/s; a sin q~/sin qb 2 = 0.503).
Fig. 5. Modified model of the self-locking pair.

Self-locking drives 935
, X o x l
O1
Fig. 6. Self-locking kinematic pair (PS) in kinematic chains. Subscripts: 0--motor; 3--receiver.
When x2 Rt2 > 0 then contact is at side B, else contact is at A. Absolute value of reaction R2t is
R21 = sin(q~2 + 0" ) (13)
For the straight motion the upper sign in (1 3) is valid for the contact at side B and the lower sign for contact at A. For the reverse motion it is contrariwise but the formula remains valid. New expression of this reaction may be used in a mathematical model of self-locking kinematic pair instead of (6) and (9).
7. S E L F - L O C K I N G PAIR IN KINEMATIC CHAINS
Linear model of the whole drive with the self-locking pair (denoted PS) is presented in Fig. 6. It consists of the prime mover with mass m0 connected with PS by elastic coupling (stiffness k01, dash-pot c01 ) and the receiver with mass rn3 elastically connected (stiffness k23, dash-pot c23) to PS. Forces Pl and P2 of the basic model of PS are now as follows
P1 = k0t (x0 - xl ) + c01 0c0 - )el )
P2 = - - K 2 3 ( x 2 - x3) + c23(x2 -- -~3) (14)
differential equations of motion for the whole kinematic chain may now be written in a commonly known way (for the case of linear motion).
Both members 1 and 2 (cf. Fig. 1) in most cases are, however rotating. They have radii of basic circles equal to rl, and r2, respectively.
All the other members of the kinematic chain are rotating, as a rule, also. For such a case a similar set of equations as that for a linear motion of the chain may be derived. To avoid this it will be assumed, that the model for the rotary motion will be substituted by an equivalent model for the linear motion reduced e.g., to the axis xt. After finding, in a commonly known way, all the parameters of the equivalent to ro ta ry- -a linear model, where equivalent masses, stiffness and dash pots were used, all the formulas for the linear case might be used. Such a model might be used for modeling and simulation of all the cases described in Section 2.
The model derived here is linearized. There is no problem, however, in introducing nonlinearities of any kind into formulas (12) and (14).
8. S E L E C T E D A P P L I C A T I O N S
Let us assume now that the model described above will be used for investigation of a servomechanism with different kinds of self-locking gears, driven by an electric d.c. motor.
The electrical part of a d.c. motor may be described by a model which is present in numerous sources
d i r / d t = ( U - R r i r - KYco /r , ) / L r (15)
where: U--vol tage applied to the motor (V) Lr--inductanc¢ of the rotor windings (H) Rr--resistance of the rotor windings (fl)

936 A .A . Ol(~lzki
K-- a constant. In the system of SI units with the same numerical value for generating an e.m.f. (V/(rad/s)) and/or, a driving torque of the motor (Nm/A)
/r---current in the rotor windings (A)
For the mechanical part of the motor and a linear model of the drive it is easy to find that
5~o = ( K i t - PI ri)/morl (16)
Voltage applied to the electric motor in a typical servomechanism is proportional to the difference between reference and actual displacements; Xo, and Xo, and velocities: :to, and :t o, respectively• Thus
U = kL(Xor -- Xo) + kv (:to, - :to). (17)
The study presented here concerns the case where the output shaft of a servomechanism rotates
(a)
f ~
'
t~c; see I
~Om 0 0.2
\
I0 cssp 0.4 0.6 0.fl t .0 1.2 1.4 1.6 l .B 2.0
o
t o
o
o"1
(b)
J Bm mBBBBB
mnm m
0.4 0.6
c )
' 0.0 0.2
Jh|,,
I" time; see cssp I
0•8 1•0 1.2 1.4 1.6 !•B
Figs 7(a) and (b)--caption opposite.
2.0

Self-locking drives 937
e)
0 !
i
U";
I
I t ip
I
' 0.0 O.~ U , 4 U . ~ U . U I . U l , d 1 . 4
m m
z.~ 1.8 2.0
o ( d )
o
o
t ~
Q
o
o
7
o
o
0.0 0.2 0.4 0.5 O.B 1.0 1.2 1.4 t.fi 1.6
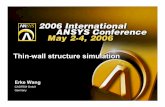
Fig, 7. Selected results of simulation for Example I. (a, b) Straight motion; (c, d) reverse motion, l--Reference displacement (x0~; m); 2--reduced displacement of the motor (x0; m); 3--reference velocity (vo~; m/s); 4--velocity of the motor (x0; m/s); 5~--current (i; A); 6--voltage (u/10; V); 7-- notvna} bearings
load divided by I00 (N m/100; N); 8--normal bearings load divided by 100 (N0z/100; N).
2.0
by angle ~ additional mass (say 10 kg) which is at a distance r 3 (0, 2 m) from the axis o f the shaft. Initial posit ion o f the mass is vertical.
Reference signals xor, 5:o~ used in (17) may be o f a different kind. It was assumed here that reference sinusoidal acceleration impulses (g0t) accelerate and/or decelerate the system in 1/4 o f the whole period of motion.

938 A.A. Ol~dzki
8.1. Simulation techniques
All the formulas presented above were used later in a simulation module (unit) written for IBM PC simulation program CSSP (author I. Siwicki--Poland). Name CSSP comes from: Continuous Systems Simulation Program. Model of a rigid self-locking kinematic pair was tested first and some results of test runs were presented in Section 5. That model was included next into kinematic chain from the Fig. 6.
Example l--twinworm drive
Servomechanism with rotary motion of all the members consists of PS with transmission ratio equal to art/r2 (twinworm) connected by an elastic shaft (K23) to a rigid gear box with transmission ratio 1/5. Gravitational forces produce here an equivalent torque on the input shaft of the box M3=4s in( t~3/5)Nm. Equivalent moment of inertia for this part of a chain equals 13 = 0.02 kg m 2, K23 = 5000 Nm/rad and C23 = 2 Nms/rad. Servomechanism consists also of a d.c. motor and coupling (K0t,C0t) with the estimated values: K0t = 4 0 0 N m / r a d and Cot = 0.08 Nms/rad. Moment of inertia of the d.c. motor equals I0 = 0.00038 kgm 2 and its data are: Rr = 1.05 t), K = 0.166 V/(rad/s) and/or Nm/A and Lr = 0.0004 H.
Data of the PS were assumed: q~l = 6°, (~2 = 12°, P' = 8°, and estimated: lj = 0.00005 kgm 2 and 12 = 0.000125 kgm 2. (Sum of the lead angles is close here to 2p' which gives almost the same values for the input power for both straight and reverse motion). All the data for the rotary motion were transformed next into the equivalent data for the linear model. External force P3 = M3/r2, for the assumed angular stroke (k3 = 5rt, the equivalent linear stroke x30 = 5~r2, and so on.
8.2. Selected results of simulation
Several diagrams obtained from simulation of the servomechanism described above are presented in Fig. 7. All of them were obtained for the amplifications in the feedback: kL = 1000 V/m and kv--100V/(m/s). In Fig. 7(a) the comparison is given between reference and real curves for displacement and velocity of the first member in the chain (with the index 0). This is the case of straight motion. A good agreement can be seen here for the two types of curves. In the same figure (bottom part) sides of contact are indicated. Constant side of contact (B) is present here for motion with positive and zero acceleration and with a low value of negative acceleration. Remaining part of motion is characterized by frequent changes of the sides of contact. Voltage diagram of Fig. 7(a) has a shape close to the reference velocity signal. Changes of contact's sides registered in Fig. 7(a) are causing oscillations and increase of the bearing loads. They are depicted in Fig. 7(b) and reach up to 350 N.
Results of simulation for the reverse motion of the servomechanism are F resented in Figs 7(c) and (d). They were obtained for the same conditions as in the case of the straight motion and concern the same physical values. Changes of contact's sides were this time more frequent as in the previous case. Those changes are reflected again in runs of bearing loads [Fig. 7(d) and in diagrams of current (5) and voltage (6)]. Dynamic loads on bearings were incredibly high--up to 6000 N.
Example 2--worm drive
It is assumed here that the total ratio of a servomechanism is the same as in Example 1 and equals i = ½at1/r2 = 0.0201; 1/i ,~ 50. Thus, only one gear box with worm gear is needed. For axial modulus m equal to 3mm, and z2=50: r z = 7 5 m m . For the assumed integer ratio 2rl /m=lO and z~ = 1, rt = 15 mm. Thus, ~b t = tan-t(ir2/rt)= 5.71 ° and ~b 2 = 90 ° - t, bt = 84.29 °. Torque M3 equals now 20sinc~3,(P3=M3/r2). If angular stroke ~b3 = l r, then equivalent linear stroke x30 = nr 2 = 235.62 mm. Values of all the other parameters are remaining the same as in Example 1.
Example 3--crossed helical gears
Here again, like in case 2 we have one gear box with transmission ratio i = 0.02. PS is now in a shape of a pair of crossed helical gears. Pinion with number of teeth equal to 3 resembles more a worm. The other member of PS (150 teeth) is a regular helical gear. For tot = 6 ° and a normal

Self-locking drives 939
modulus m = l . 5 m m r l = 3 " l . 5 / ( 2 c o s 8 4 ° ) = 2 1 . 5 r a m and r2=150 •1.5/2cos6c) =113 .1mm. Values of all the other parameters are again the same as in Example 1.
8.3. Selected results of simulation (Examples 2 and 3)
Results of simulations for both Examples 2 and 3 were similar. Thus, only diagrams for Example 3; Fig. 8(a) straight motion and Fig. 8(b) reverse motion, are here presented. All the curves were smooth (bearings loads also). All the time the contact was at side B [the only exception is at the beginning of Fig. 8(b)]. Maximum value of bearings load N0, was equal to 260 N in Example 2 and 182 N in Example 3.
(a)
krJ
k~
0
/ / / / / /
~'o.o 0.2
N 9 , __
time; see cssp
0.4 0.6 O.O 1.0 1.2 1.4 1.6 1.8 2.0
(b)
,q. t i m e ; s e e
cssp ~J ' O.O 0.2 0.4 0.6 0.8 t.O 1.2 1,4 1.6 1.8 2.0
Fig. 8. Results of simulation for Example 3: (a) straight motion, (b) reverse motion (Legend the same as in Fig. 7).

940 A . A . Ol~dzki
Example 4--screw drive This is a special case of worm gear (Example 2) where r 2 goes to infinity• To compare both drives
all the parameters of Example 2 were used. The only difference was in force P3 which must be here constant (P3 = - 4 0 0 . 2 / ~ = -254 .6 N). It was reflected in simulation diagrams of Fig. 9(a) and (b) in the shape of the current's curve (5). Diagrams of N01 and N02 were also smooth like in Examples 2 and 3 with N02 .. . . = 340 N for the straight motion•
9. CONCLUSIONS
The model proposed in this paper of a self-locking kinematic pair seems to be satisfactory in application for modeling of different self-locking drives. Some simplifications in building physical
(a)
5 Q ~ . . - . _ , _ _ _ ~ _ J
6 .e f
°oo o2
time, s¢c
cssp 0•4 0 6 0 8 i•O 1.2 i 4 1•6 1.8 2 0
If) ¢v.}
Od
(b)
u ' }
r
u ' )
~ 0 . 0 0.2 0.4 0.6 0.8
6 " time; sec cssp |
1.0 i . 2 1.4 t . 6 t . 8 2 .0
Fig. 9. Results of simulation for Example 4: (a) straight motion, (b) reverse motion (Legend the same as in Fig. 7).

Self-locking drives 941
model first and mathematical model next will need experimental verification on the laboratory rig in the future.
Test data of the servomechanism in the examples were of a random kind and served only for the purposes to test a simulation model. Only a rigid version of PS was tested (although it was more difficult to model it on the computer than the modified, elastic version). Simulation model of the modified version might be easily obtained from the rigid version after introducing minor changes.
Results of the preliminary tests of a twinworm drive indicated severe bearing loads. Thus, in the future, an improved model of PS without omitting friction in it's bearings must be taken into consideration. Behavior of twinworm drive in this particular test was only satisfactory in cases of straight motion. Lowering of the load (reverse motion) was accompanied by heavy oscillations and dramatic increase of bearings loads and current. Total energy needed for lifting the load was, however, about one-half of energy consumed by classical drives (Examples 2, 3 and 4).
First attempts to study properties of twinworm gear was made by the author of this paper as early as in 1989. A less mature simulation model than that described in this paper gave similar results. All the runs for the return motion obtained from numerous simulations were accompanied by heavy oscillations similar to those of Fig. 7(c,d). There was no way to avoid them by changes of parameters within a practically acceptable range. Improved model (after some improvements introduced into the CSSP program concerning simulation of systems with discontinuities) was more general and enabled to simulate regular self-locking drives also. Results of their simulations (cfo Figs 8 and 9) gave results which coincide with everybody's practical observations, thus one can assume that results of simulation are of practical value and need confirmation through experimental verification.
Twinworm, Popper 's invention, is already over 30 years old. Lack of the continuation of his ideas might be indicating that drawbacks of the twin worm gears, like heavy loads on bearings and high contact stresses between teeth (point contact) and low transmission ratio (in the Example 1, a =0 .503) - - i t can not be used as a high-reduction gear, put some limits on the practical applications of this drive. In the history of engineering were, however, cases of the return to the temporary abandoned ideas. Invention of Popper might belong to such cases. It is clear, that the twinworm gear can not be used for heavy loaded, high speed drives but it can find applications in fine drives where the property of self-locking together with a high efficiency is needed. An example of such an application might be a drive of a small-size gripper, where self-locking is necessary as an additional security measure in the case of the break in the supply of the electric power.
Readers of M e c h . M a c h . T h e o r y can obtain a listing of the program unit from the author of this paper. Simulation program CSSP was included on a floppy diskette in the textbook of Ref. [10].
Acknowledgement--Certain parts of the research work presented here were made during the author's stay at "La Sapienza'" University in Rome in 1989 where his host, Professor Adalberto Vinciguerra, was kind enough to create a congenial climate for the study of self-locking drives. His finest attitude to the problem (and to the visitor also) is highly acknowledged.
R E F E R E N C E S
I. A. Ol~dzki and T. Bogumil, Dynamik der Selbsthemmended Schneckengetriebe w/ihrend der Auslaufzeit, Wiss. zeitschr. "Technische Hochschule Ilmenau" (1963).
2. A. Ol~dzki and S. Bramski, "CSMP" model of certain kind of self-locking worm gear drive. Proc. CAD in Mechanical Engineering, Milan (1976).
3. A. Ol~dzki, Dynamics of permanent self-locking systems. J. Mech. 4, 105 (1965). 4. B. Popper and D. W. Pessen, Trans. ASME J. Engng Ind. August, 191 (1960). 5. N. P. Chironis, Mechanisms, Linkages and Mechanical Controls. McGraw-Hill, New York (1965). 6. A. Ol~dzki, High efficiency self-locking gears. VIII Worm Congress on TMM-Proc. 2, 601 (1991). 7. C. D. W. Dudley (Editor), Gear Handbook. McGraw-Hill, New York (1962). 8. Z. Kornberger, Przektadnie ~limakowe (Worm Gears). WNT, Warsaw (1973). 9. J. E. Shigley and C. R. Mischke (Editors), Standard Handbook o f Machine Design. McGraw-Hill, New York
(1986). 10. A. Ol~dzki, D. de Falco and S. della Valle, Simulazione Dinamica dei Sistemi Fisici. CUEN, Napoli (1991).

942 A.A. Ol~lzki
M O D E L L I E R E N U N D S I M U L A T I O N V O N S E L B S T H E M M E N D E N
G E T R I E B E N
Zusammenfassung--ln der vorherigen Arbeit des Verfassers die Eigenschaften yon selbsthemmenden Doppelschneekengtriebe zusammen mit einem einfachem Modell beschrieben waren.
In der vorligenden Arbeit ein verfeinerntes Modell beschrieben ist, welcher auch fiir die andere selbsthemmende Getrieben benutzt sein kann.
Eine Klassierung von selbsthemmender Getrieben ist auch gegeben. Selbsthemmendes kinematisches Paar wurde zuerst modelliert und simuliert. Result~iten "Stick-Slip"
Vorg/inge festgestellt haben. Dieses Paar war zun/ichst in dem typischen kinematischen Kette benutzt und ein Beispiel von Servomechanismus mit dem elektrischen Motor studiert. Vier, verschiede Getriebe (Doppelschneckengetriebe, Schneckengetriebe, geschr/inktes Schraubgetriebe und Schraubenantrieb) analysiert waren.