Modeling and Control of Tower Crane Motions
47
Modeling and Control of Tower Crane Motions Lobna Tarek 1 & Ayman El-Badawy 1 & Horst Schulte 2 1 German University in Cairo (GUC) Mechatronics Department Control & Dynamical Systems Group 2 University of Applied Sciences Berlin (HTW) Department of Engineering I Control Engineering Group October 29, 2019
Transcript of Modeling and Control of Tower Crane Motions

Modeling and Control of Tower Crane Motions
Lobna Tarek 1 & Ayman El-Badawy 1 & Horst Schulte 2
1German University in Cairo (GUC)Mechatronics Department
Control & Dynamical Systems Group2University of Applied Sciences Berlin (HTW)
Department of Engineering IControl Engineering Group
October 29, 2019
Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Crane’s accidents
Cranesare widely used to transport heavy loads in shipyards, factories and construction sites.
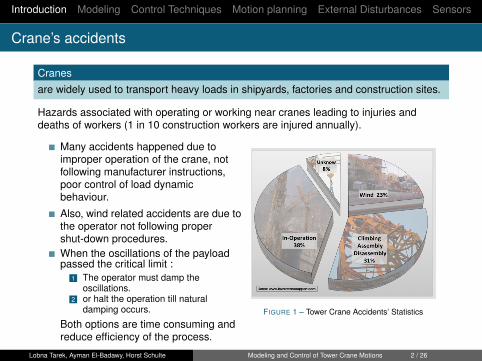
Hazards associated with operating or working near cranes leading to injuries anddeaths of workers (1 in 10 construction workers are injured annually).
Many accidents happened due toimproper operation of the crane, notfollowing manufacturer instructions,poor control of load dynamicbehaviour.
Also, wind related accidents are due tothe operator not following propershut-down procedures.When the oscillations of the payloadpassed the critical limit :
1 The operator must damp theoscillations.
2 or halt the operation till naturaldamping occurs.
Both options are time consuming andreduce efficiency of the process.
FIGURE 1 – Tower Crane Accidents’ Statistics
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 2 / 26
Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Crane’s accidents
Cranesare widely used to transport heavy loads in shipyards, factories and construction sites.
Hazards associated with operating or working near cranes leading to injuries anddeaths of workers (1 in 10 construction workers are injured annually).
Many accidents happened due toimproper operation of the crane, notfollowing manufacturer instructions,poor control of load dynamicbehaviour.
Also, wind related accidents are due tothe operator not following propershut-down procedures.When the oscillations of the payloadpassed the critical limit :
1 The operator must damp theoscillations.
2 or halt the operation till naturaldamping occurs.
Both options are time consuming andreduce efficiency of the process.
The proposed solution :Automated Tower Cranes
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 2 / 26

Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Automated Tower Cranes
Objective :
1 Precise trajectory tracking.
2 Reduced transfer time.
3 Elimination of the payload oscillations.
4 Regardless to the working conditions(wind).
FIGURE 1 – Tower Crane in Construction Site [1]
Safety issues on construction sites areno longer a concern.
Raising the efficiency and productivityof the construction process.
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 3 / 26
Process Automation Evolution
Intelligent Process Automation
Labor-intensive repetitive tasks are replicated following predeterminedpath while handle structured data and standardized processes.High level of human intervention and operating.
Semi-structured data processing through predefined algorithms to handledynamic processes. Human takes over when necessary.
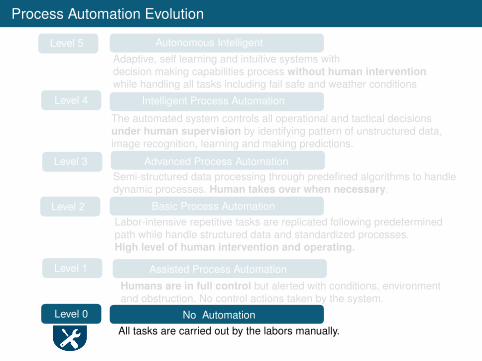
Level 5 Autonomous IntelligentAdaptive, self learning and intuitive systems withdecision making capabilities process without human interventionwhile handling all tasks including fail safe and weather conditions
Humans are in full control but alerted with conditions, environmentand obstruction. No control actions taken by the system.
The automated system controls all operational and tactical decisionsunder human supervision by identifying pattern of unstructured data,image recognition, learning and making predictions.
Advanced Process AutomationLevel 3
Basic Process AutomationLevel 2
Assisted Process AutomationLevel 1
All tasks are carried out by the labors manually.No AutomationLevel 0
Level 4

Process Automation Evolution
Intelligent Process Automation
Labor-intensive repetitive tasks are replicated following predeterminedpath while handle structured data and standardized processes.High level of human intervention and operating.
Semi-structured data processing through predefined algorithms to handledynamic processes. Human takes over when necessary.
Level 5 Autonomous IntelligentAdaptive, self learning and intuitive systems withdecision making capabilities process without human interventionwhile handling all tasks including fail safe and weather conditions
Humans are in full control but alerted with conditions, environmentand obstruction. No control actions taken by the system.
The automated system controls all operational and tactical decisionsunder human supervision by identifying pattern of unstructured data,image recognition, learning and making predictions.
Advanced Process AutomationLevel 3
Basic Process AutomationLevel 2
Assisted Process AutomationLevel 1
All tasks are carried out by the labors manually.No AutomationLevel 0
Level 4

Process Automation Evolution
Intelligent Process Automation
Labor-intensive repetitive tasks are replicated following predeterminedpath while handle structured data and standardized processes.High level of human intervention and operating.
Semi-structured data processing through predefined algorithms to handledynamic processes. Human takes over when necessary.
Level 5 Autonomous IntelligentAdaptive, self learning and intuitive systems withdecision making capabilities process without human interventionwhile handling all tasks including fail safe and weather conditions
Humans are in full control but alerted with conditions, environmentand obstruction. No control actions taken by the system.
The automated system controls all operational and tactical decisionsunder human supervision by identifying pattern of unstructured data,image recognition, learning and making predictions.
Advanced Process AutomationLevel 3
Basic Process AutomationLevel 2
Assisted Process AutomationLevel 1
All tasks are carried out by the labors manually.No AutomationLevel 0
Level 4

Process Automation Evolution
Intelligent Process Automation
Labor-intensive repetitive tasks are replicated following predeterminedpath while handle structured data and standardized processes.High level of human intervention and operating.
Semi-structured data processing through predefined algorithms to handledynamic processes. Human takes over when necessary.
Level 5 Autonomous IntelligentAdaptive, self learning and intuitive systems withdecision making capabilities process without human interventionwhile handling all tasks including fail safe and weather conditions
Humans are in full control but alerted with conditions, environmentand obstruction. No control actions taken by the system.
The automated system controls all operational and tactical decisionsunder human supervision by identifying pattern of unstructured data,image recognition, learning and making predictions.
Advanced Process AutomationLevel 3
Basic Process AutomationLevel 2
Assisted Process AutomationLevel 1
All tasks are carried out by the labors manually.No AutomationLevel 0
Level 4

Process Automation Evolution
Intelligent Process Automation
Labor-intensive repetitive tasks are replicated following predeterminedpath while handle structured data and standardized processes.High level of human intervention and operating.
Semi-structured data processing through predefined algorithms to handledynamic processes. Human takes over when necessary.
Level 5 Autonomous IntelligentAdaptive, self learning and intuitive systems withdecision making capabilities process without human interventionwhile handling all tasks including fail safe and weather conditions
Humans are in full control but alerted with conditions, environmentand obstruction. No control actions taken by the system.
The automated system controls all operational and tactical decisionsunder human supervision by identifying pattern of unstructured data,image recognition, learning and making predictions.
Advanced Process AutomationLevel 3
Basic Process AutomationLevel 2
Assisted Process AutomationLevel 1
All tasks are carried out by the labors manually.No AutomationLevel 0
Level 4

Process Automation Evolution
Intelligent Process Automation
Labor-intensive repetitive tasks are replicated following predeterminedpath while handle structured data and standardized processes.High level of human intervention and operating.
Semi-structured data processing through predefined algorithms to handledynamic processes. Human takes over when necessary.
Level 5 Autonomous IntelligentAdaptive, self learning and intuitive systems withdecision making capabilities process without human interventionwhile handling all tasks including fail safe and weather conditions
Humans are in full control but alerted with conditions, environmentand obstruction. No control actions taken by the system.
The automated system controls all operational and tactical decisionsunder human supervision by identifying pattern of unstructured data,image recognition, learning and making predictions.
Advanced Process AutomationLevel 3
Basic Process AutomationLevel 2
Assisted Process AutomationLevel 1
All tasks are carried out by the labors manually.No AutomationLevel 0
Level 4
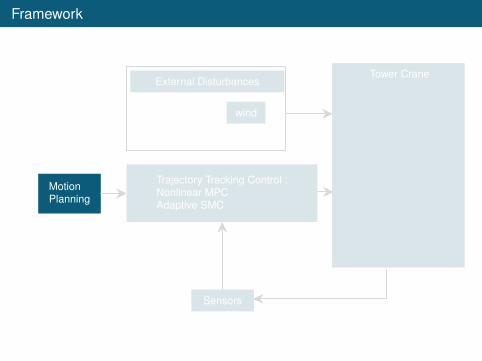
Framework
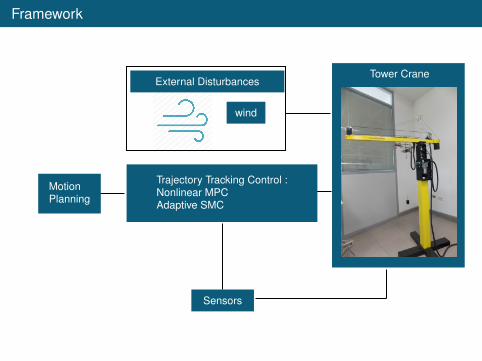
MotionPlanning
Tower CraneExternal Disturbances
Trajectory Tracking Control :Nonlinear MPCAdaptive SMC
wind
Sensors

Framework
MotionPlanning
Tower CraneExternal Disturbances
Trajectory Tracking Control :Nonlinear MPCAdaptive SMC
wind
Sensors

Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Tower Crane System
The Tower Crane is modeled as a five degree of freedom robotic arm : Trolley, Jib,Alpha, Beta and Cable.
A highly nonlinear underactuated MIMO system. Hence, controlling such a systemis hard compared to a fully actuated system since it has only two inputs forobtaining four outputs.
FIGURE 2 – Lab sized tower crane FIGURE 3 – Schematic Representations of Tower Cranes
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 6 / 26

Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Dynamics
The nonlinear model equations was based on Lagrangian method :
M(q)︸ ︷︷ ︸inertiamatrix
q + b(q, q)︸ ︷︷ ︸Centrifugal and
damping elements
+ g(q)︸︷︷︸Gravitational
forces
= F︸︷︷︸Motor’sinputs
The coupling between the Degrees of free-dom is considered.Including the coupling between the rotationof the jib and the payload oscillations, thatoccurs due to :
Coriolis acceleration
~ap = ~ao +bd2
dt2~r + 2~ωib ×
bddt~r
+ ~αib ×~r + ~ωib × (~ωib ×~r)
Centripetal accelerationFIGURE 4 – Double Pendulum System [2]
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 7 / 26

Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Dynamics
The nonlinear model equations was based on Lagrangian method :
M(q)︸ ︷︷ ︸inertiamatrix
q + b(q, q)︸ ︷︷ ︸Centrifugal and
damping elements
+ g(q)︸︷︷︸Gravitational
forces
= F︸︷︷︸Motor’sinputs
The coupling between the Degrees of free-dom is considered.Including the coupling between the rotationof the jib and the payload oscillations, thatoccurs due to :
Coriolis acceleration
~ap = ~ao +bd2
dt2~r + 2~ωib ×
bddt~r
+ ~αib ×~r + ~ωib × (~ωib ×~r)
Centripetal accelerationFIGURE 4 – Double Pendulum System [2]
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 7 / 26

Framework
MotionPlanning
Tower CraneExternal Disturbances
Trajectory Tracking Control :Nonlinear MPCAdaptive SMC
wind
Sensors

Framework
MotionPlanning
Tower CraneExternal Disturbances
Trajectory Tracking Control :Nonlinear MPCAdaptive SMC
wind
Sensors

Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Proposed Controllers
Robust Control Adaptive Control Optimal Control
UnmodeledDynamics
Parametricuncertainties
Nonlinear Constraints
Sliding ModeControl
Adaptive SlidingMode Controlwith varying gain
Model PredictiveControl
Reduce the controleffort demand
Control Design
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 9 / 26

Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Phases of Sliding Mode Technique
1st phase : reaching phase where states are moving from initial position to thesliding surface in finite time.2nd phase : sliding phase : the states slide on the surface till it reach its desiredoperating point and stays there using Lyapunov theory.
FIGURE 5 – Sliding Model Control [3]
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 10 / 26
Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Sliding Mode Control Procedure
Sliding Variable
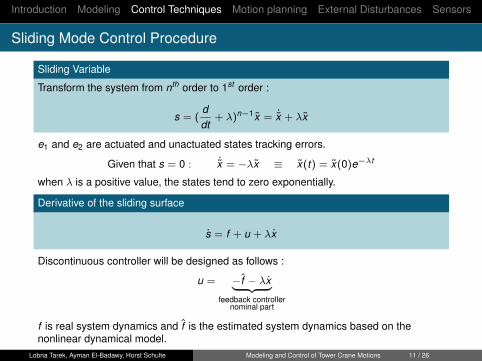
Transform the system from nth order to 1st order :
s = (ddt
+ λ)n−1x = ˙x + λx
e1 and e2 are actuated and unactuated states tracking errors.
Given that s = 0 : ˙x = −λx ≡ x(t) = x(0)e−λt
when λ is a positive value, the states tend to zero exponentially.
Derivative of the sliding surface
s = f + u + λx
Discontinuous controller will be designed as follows :
u = −f − λx︸ ︷︷ ︸feedback controller
nominal part
f is real system dynamics and f is the estimated system dynamics based on thenonlinear dynamical model.
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 11 / 26

Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Sliding Mode Control Procedure
Sliding Variable
Transform the system from nth order to 1st order :
s = (ddt
+ λ)n−1x = ˙x + λx
e1 and e2 are actuated and unactuated states tracking errors.
Given that s = 0 : ˙x = −λx ≡ x(t) = x(0)e−λt
when λ is a positive value, the states tend to zero exponentially.
Derivative of the sliding surface
s = f + u + λx = f − f − λx + λx
Discontinuous controller will be designed as follows :
u = −f − λx︸ ︷︷ ︸feedback controller
nominal part
f is real system dynamics and f is the estimated system dynamics based on thenonlinear dynamical model.
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 11 / 26

Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Sliding Mode Control Procedure
Sliding Variable
Transform the system from nth order to 1st order :
s = (ddt
+ λ)n−1x = ˙x + λx
e1 and e2 are actuated and unactuated states tracking errors.
Given that s = 0 : ˙x = −λx ≡ x(t) = x(0)e−λt
when λ is a positive value, the states tend to zero exponentially.
Derivative of the sliding surface
s = f + u + λx = f − f��−λx��+λx
Discontinuous controller will be designed as follows :
u = −f − λx︸ ︷︷ ︸feedback controller
nominal part
f is real system dynamics and f is the estimated system dynamics based on thenonlinear dynamical model.
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 11 / 26

Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Sliding Mode Control Procedure
Sliding Variable
Transform the system from nth order to 1st order :
s = (ddt
+ λ)n−1x = ˙x + λx
e1 and e2 are actuated and unactuated states tracking errors.
Given that s = 0 : ˙x = −λx ≡ x(t) = x(0)e−λt
when λ is a positive value, the states tend to zero exponentially.
Derivative of the sliding surface
s = f + u + λx = f − f − Ksgn(s)
Discontinuous controller will be designed as follows :
u = −f − λx︸ ︷︷ ︸feedback controller
nominal part
−Ksgn(s)︸ ︷︷ ︸corrective
term
f is real system dynamics and f is the estimated system dynamics based on thenonlinear dynamical model.
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 11 / 26

Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Stability Analysis
Lyapunov positive definite function
V =12
s2
u is substituted in derivative of Lyapunov function to get :
V = ss = s(f − f − Ksgn(s))
using s.sgn(s) = |s|.V = s(f − f )− K |s|
The model uncertainties with its constant upper bound given by :
|f − f | ≤ F = constant
V ≤ |f − f ||s| − K |s|
V ≤ (F − K )|s| where, K = F + η
V ≤ −η|s| < 0
Therefore, s → 0 as t →∞ which is Globally Asymptotically stable when η > 0.Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 12 / 26

Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Adaptive Sliding Mode Control
An adaptation law is added to calculate the varying parameters, to be used by thecontroller.
FIGURE 6 – ASMC Procedure
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 13 / 26

Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Nonlinear Model Predictive Control (NMPC)
Also named receding horizon control, relies on :
Solving an Optimal Control Problem (OCP) at each sampling instant.
Applying the first part of the optimal control input to the system.
The optimization horizon is shifted forward and the OCP is solved again with theactual (measured) system states as initial conditions [4]
FIGURE 7 – MPC Procedure [5]
FIGURE 8 – chess [6]
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 14 / 26

Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Optimal Control Problem Formulation
Modelx(k + 1) = fk (x(k), u(k))
x(k) is the state vector, and u(k) is the control input.Constraints (h(x(k), u(k)) ≤ 0) :
Physical constraints (i.e. limitations) on the states and/or inputs.Performance constraint.Safety constraint
Performance Objective
The performance of a system is evaluated quantitatively, the designer selects aperformance objective.An optimal control is defined to minimize the performance objective.
J∗0←N = min xTN P xN︸ ︷︷ ︸
Terminal Cost
+
N−1∑k=0
xTk Q xk + uT
k R uk︸ ︷︷ ︸Stage Cost
where N is the time horizon, the weighting matrices are P, Q and R .
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 15 / 26

Framework
MotionPlanning
Tower CraneExternal Disturbances
Trajectory Tracking Control :Nonlinear MPCAdaptive SMC
wind
Sensors
Framework
MotionPlanning
Tower CraneExternal Disturbances
Trajectory Tracking Control :Nonlinear MPCAdaptive SMC
wind
Sensors

Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Construction Site Simulation
FIGURE 9 – PathPalnning [7] FIGURE 10 – Smoother Path [7]
The high dynamic characteristics of construction site conditions often requirere-planning in real time the crane’s path to ensure safety and efficiency.
Any unpredicted objects or other conflicts related to the operations of the craneson site should be detected and tracked in real time.
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 17 / 26
Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
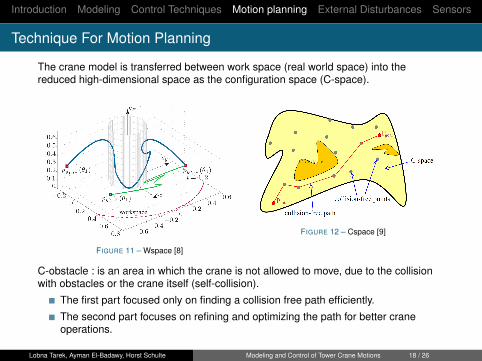
Technique For Motion Planning
The crane model is transferred between work space (real world space) into thereduced high-dimensional space as the configuration space (C-space).
FIGURE 11 – Wspace [8]
FIGURE 12 – Cspace [9]
C-obstacle : is an area in which the crane is not allowed to move, due to the collisionwith obstacles or the crane itself (self-collision).
The first part focused only on finding a collision free path efficiently.
The second part focuses on refining and optimizing the path for better craneoperations.
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 18 / 26

Framework
MotionPlanning
Tower CraneExternal Disturbances
Trajectory Tracking Control :Nonlinear MPCAdaptive SMC
wind
Sensors

Framework
MotionPlanning
Tower CraneExternal Disturbances
Trajectory Tracking Control :Nonlinear MPCAdaptive SMC
wind
Sensors

Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Fuzzy Logic Controllers
An intelligent control system, learning from experience that mainly apply knowledge tomanipulate the environment.
PID Control : IF temperature > 25 THEN turn A/C ON (24.9 won’t be accepted).Fuzzy Control : IF temperature is HOT THEN turn A/C ON (depends oncircumstances)
FIGURE 13 – Fuzzy Logic Toolkit From National Instruments
Takagi Sugeno-Fuzzy Observer
The external disturbances such as wind are estimated.
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 20 / 26

Framework
MotionPlanning
Tower CraneExternal Disturbances
Trajectory Tracking Control :Nonlinear MPCAdaptive SMC
wind
Sensors

Framework
MotionPlanning
Tower CraneExternal Disturbances
Trajectory Tracking Control :Nonlinear MPCAdaptive SMC
wind
Sensors

Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Estimators
The states are measured using encoders.The unmeasured states such as velocities will be estimated usingextended Kalman filter.
Prediction
Predict the statefrom the model
Predict the errorcovariance
Correction
Compute theKalman Gain
Estimate the statefrom the measurement
Update the errorcovariance
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 22 / 26
Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Summary
Tower cranes are widely-used and its operation is modified byapplying control theory.
It is crucial to properly suppress the oscillations of the payload toavoid dangerous situations.
Also, the rejection of external forces induced by wind.
The efficiency of the controllers are validated experimentally on alaboratory tower crane.
ASMC is used to handle system’s uncertainties.
The MPC controller is used taking into account the systemconstraints while minimizing the energy consumption.
A collision free path is to be calculated in real time for the load tofollow.
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 23 / 26

Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Summary
Tower cranes are widely-used and its operation is modified byapplying control theory.
It is crucial to properly suppress the oscillations of the payload toavoid dangerous situations.
Also, the rejection of external forces induced by wind.
The efficiency of the controllers are validated experimentally on alaboratory tower crane.
ASMC is used to handle system’s uncertainties.
The MPC controller is used taking into account the systemconstraints while minimizing the energy consumption.
A collision free path is to be calculated in real time for the load tofollow.
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 23 / 26

Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Summary
Tower cranes are widely-used and its operation is modified byapplying control theory.
It is crucial to properly suppress the oscillations of the payload toavoid dangerous situations.
Also, the rejection of external forces induced by wind.
The efficiency of the controllers are validated experimentally on alaboratory tower crane.
ASMC is used to handle system’s uncertainties.
The MPC controller is used taking into account the systemconstraints while minimizing the energy consumption.
A collision free path is to be calculated in real time for the load tofollow.
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 23 / 26

Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Summary
Tower cranes are widely-used and its operation is modified byapplying control theory.
It is crucial to properly suppress the oscillations of the payload toavoid dangerous situations.
Also, the rejection of external forces induced by wind.
The efficiency of the controllers are validated experimentally on alaboratory tower crane.
ASMC is used to handle system’s uncertainties.
The MPC controller is used taking into account the systemconstraints while minimizing the energy consumption.
A collision free path is to be calculated in real time for the load tofollow.
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 23 / 26

Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Summary
Tower cranes are widely-used and its operation is modified byapplying control theory.
It is crucial to properly suppress the oscillations of the payload toavoid dangerous situations.
Also, the rejection of external forces induced by wind.
The efficiency of the controllers are validated experimentally on alaboratory tower crane.
ASMC is used to handle system’s uncertainties.
The MPC controller is used taking into account the systemconstraints while minimizing the energy consumption.
A collision free path is to be calculated in real time for the load tofollow.
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 23 / 26

Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Summary
Tower cranes are widely-used and its operation is modified byapplying control theory.
It is crucial to properly suppress the oscillations of the payload toavoid dangerous situations.
Also, the rejection of external forces induced by wind.
The efficiency of the controllers are validated experimentally on alaboratory tower crane.
ASMC is used to handle system’s uncertainties.
The MPC controller is used taking into account the systemconstraints while minimizing the energy consumption.
A collision free path is to be calculated in real time for the load tofollow.
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 23 / 26

Introduction Modeling Control Techniques Motion planning External Disturbances Sensors
Summary
Tower cranes are widely-used and its operation is modified byapplying control theory.
It is crucial to properly suppress the oscillations of the payload toavoid dangerous situations.
Also, the rejection of external forces induced by wind.
The efficiency of the controllers are validated experimentally on alaboratory tower crane.
ASMC is used to handle system’s uncertainties.
The MPC controller is used taking into account the systemconstraints while minimizing the energy consumption.
A collision free path is to be calculated in real time for the load tofollow.
Lobna Tarek, Ayman El-Badawy, Horst Schulte Modeling and Control of Tower Crane Motions 23 / 26
References
[1] D. Qian and J. Yi, “Hierarchical sliding mode control for under-actuated cranes,”Heidelberg, Ber : Springer, 2016.
[2] A. V. Perig, A. N. Stadnik, A. I. Deriglazov, and S. V. Podlesny, “3 dof sphericalpendulum oscillations with a uniform slewing pivot center and a small angleassumption,” Shock and Vibration, vol. 2014, 2014.
[3] R. Ghazali, Y. M. Sam, M. F. Rahmat, A. W. I. M. Hashim, et al., “Performancecomparison between sliding mode control with pid sliding surface and pid controllerfor an electro-hydraulic positioning system,” International Journal on AdvancedScience, Engineering and Information Technology, vol. 1, no. 4, pp. 447–452, 2011.
[4] F. Allgöwer, T. A. Badgwell, J. S. Qin, J. B. Rawlings, and S. J. Wright, “Nonlinearpredictive control and moving horizon estimation—an introductory overview,” inAdvances in control, pp. 391–449, Springer, 1999.
[5] M. Morari, “Model predictive control,” Spring Semester 2014.
[6] F. Borrelli, A. Bemporad, and M. Morari, Predictive control for linear and hybridsystems.Cambridge University Press, 2017.
[7] G. Lee, H.-H. Kim, C.-J. Lee, S.-I. Ham, S.-H. Yun, H. Cho, B. K. Kim, G. T. Kim,and K. Kim, “A laser-technology-based lifting-path tracking system for a robotictower crane,” Automation in Construction, vol. 18, no. 7, pp. 865–874, 2009.

References (cont.)
[8] M. Böck and A. Kugi, “Real-time nonlinear model predictive path-following controlof a laboratory tower crane,” IEEE Transactions on Control Systems Technology,vol. 22, no. 4, pp. 1461–1473, 2013.
[9] S. Kang and E. Miranda, “Planning and visualization for automated robotic craneerection processes in construction,” Automation in Construction, vol. 15, no. 4,pp. 398–414, 2006.

Any Questions?Thank you