Mili_Bad Data Identification Methods in PS State Estimation_A Comparative Study

of 6
-
Upload
abhijeet-sahu -
Category
Documents
-
view
214 -
download
0
Transcript of Mili_Bad Data Identification Methods in PS State Estimation_A Comparative Study
-
8/20/2019 Mili_Bad Data Identification Methods in PS State Estimation_A Comparative Study
1/13
I E E E
T r a n s a c t i o n s
o n
P o w e r
A p p a r a t u s
a n d
S y s t e m s ,
V o l .
P A S - 1 0 4 ,
N o .
1 1 ,
N o v e m b e r
1 9 8 5
B A D
D A T A
I D E N T I F I C A T I O N
M E T H O D S
I N P O W E R
S Y S T E M
S T A T E
E S T I M A T I O N
-
A
C O M P A R A T I V E
S T U D Y
T h .
V a n
C u t s e m
M . R i b b e n s - P a v e l l a
D e p a r t m e n t
o f E l e c t r i c a l
E n g i n e e r i n g ;
U n i v e r s i t y
o f L i e g e
S a r t - T i l m a n ,
B - 4 0 0 0 L i e g e ,
B e l g i u m
Abstract
The
identification
techniques
available
today
are
first classified
into three broad classes. Their
behaviour
with
respect to
selected
criteria
are then
explored
and
assessed.
Further,
a series
of simulations
are carried
outwith
various
types
of
bad data.
Investig-
ating th e
way
these
identification
techniques
be -
h av e a ll ow s
completing
and
validating
th e theoretical
comparisons
and
conclusions.
l a
I N T R O D U C T I O N
In
the
list
of a power
system
s t a t e
e3timator
soft-
ware
routines, bad
data
identification
is
th e
last
but
not
least
-
satellite
function.
Its task is to
guarantee
th e reliability
of
the data
base
generated
through th e
estimator.
I n d e e d ,
despitethe
preprocessing
data validation
techniques
used
to
clear the
d a t a
re-
ceived at
a
control
center,
gross
anomalies
(suchas
bad
data,
modelling
and
parameter
e r r o r s )
may
still exist
d u ri n g e sti matio n.
To avoid
corrupting
the
resulting
data
base, it
i s
of great
importance
t ha t t he se
anoma-
lies
are
identified
and
further
eliminated
from
the
set
of
measurements.
This explains
why
t h e need for
a
func-
tion
capable
to
identify ba d
data has
been
felt almost
simultaneously
with th e need
for
the
state
estimation
function
i t s e l f .
It
also explains
the number
and
diver-
sity
of
research works
carried out
on
th e
subject.
This paper
aims
at providing a
comparative
assess-
ment
of
th e post-estimation
identification
methods(1)
available
today.
More specifically
it concentrates
on
evaluating
th e
techniques
able to identify
bad
data
( B D ) ,
i . e . grossly
erroneous
measurements.
T h e s e
tech-
niques
are
first
classified,
then
explored and
compared.
Three
broad
classes are
distinguished
:
the class of
i d e n t i f i c a t i o n
b y
e l i m r r n a t i o n
( I B E )
( 1 - 1 4 ] ,
that of
the
n o n - q u a d r a t i c c r i t e r i a
( N Q C )
[ 3 , 1 5 - 2 0 ] ,
and
th e
h y p o -
t h e s i s
t e s t i n g
i d e n t i f i c a t i o n
( H T I ) [ 2 1 1 .
The
investi-
gations
are
based
upon
both theoretical
considerations
and
practical
experience.
Th e
latter
has been
acquired
through
simulations performed
on
four different
power
systems.
T he
results
reported
here
concern
simulations
performed
on
the IEEE
30-bus
system,
with th e
three
possible
types
of multiple
BD
:
noninteracting,
inter-
acting,
an d
unidentifiable
ones.
The
paper
is
organized
as
follows.
Section
2
gathers
th e
material
necessary fo r
th e
intended
explo-
ration.
The
reader
is
supposed
to be familiar at
least
with
state
estimation
and BD
detection
techniques;
s o
this
Section
focuses essentially
on
topological
identi-
fiability
aspects
and
selection
of identifiability
criteria.
Section
3
gives
a
brief description
of
the
various
identification
methods within
their
correspond-
in g
categories,while
Section
4
investigates further
and
compares
th e three
main
methodologies.
Finally,
th e
ex-
ploration
is completed
an d validated
through
the simu-
lation
results
of
Section
5 .
85
WM
060-9
A
paper
r e c o m m e n d e d
a n d
approved
by
the
IEEE
Po w er
System
Engineering
C o m m i t t e e
o f
the
I EEE
P o w e r
Engineering
Society
f or
presentation
at th e
IEEE/PES
1985
Winter
Meeting,
New
York,
New
York,
February
3
-
8 ,
19 8 5 .
Manuscript
submitted
January
1 9 ,
1 9 8 4 ;
made
available
f o r
printing
November 1 9 ,
1984.
2 ,
MISCELLANIES
Somewhat
hybrid,
this S e c t i o n
groups
the
various
pieces
of
information n e c e s s a r y
for
t h e
subsequent
developments.
The
degree
of
the
authors'
personal
per-
ception
and interpretation
g oes
increasing
along
the
paragraphs.
Starting
w i t h
d e f i n i t i o n s
o f
t h e
usual
symbols
in
§ 2 . 1 ,
one is
l ed
up
t o
some
u s e f u l
topo-
logical
considerations
an d definitions
in
§
2.3 and
2.4
and finally
to
the
selection
of
relevant identifiability
criteria
to
be used
in the
comparative
a s s e s s m e n t
of
the
various
identification
methodologies.
2.1. STATE
E ST IM ATIO N:
DEFINITIONS
AN
SYMBOLS
N. B .
W i t h o m e
o b v i o u z
e x c e p t i o n 2 ,
f o w e L
c a 6 e
i t a & & c
Z e t t e A 6
i n d i c a t e
v e c t o 4 ,
c z a p i t a
ittc
a n d
c a p i t a t
G ' t e e k
t e t t e A
d e n o t e
m a t i c e a .
On e
s e e k s
the
e s t i m a t e
I
of
the
true state
x
which
best
fits
the
measurements
z
r e l a t e d
to
x
through
the
model :
a
4
_
)
where th e
customary
notation
is used:
z :
th e
m-dimensional
measurement
vector;
x
:
the
n-dimensional
state
vector
o f
voltage m a g-
nitudes
and
phase
angles;
n
=
2 N-
1 ,
N
being
the
nu m b e r o f
system
nodes;
e
the
m-dimensional
m e a s u r e m e n t
error
vector;
it s
i-th component
i s 2 :
a normal
noise
N(0,Ui)
if
t h e
corresponding
measurement
i s
valid,
-
an
unknown
quantity
otherwise.
Moreover
use will
be
made
of
the
variable
ei
v i -
E [ e i J ,
w h e r e
E
stands
f o r
expectation.
The
weighted
least
s q u a r e s
( W L S )
e s t i m a t e
satisfies
the
optimality
condition
H T ( . 1 )
R- [z-
h ( ± ) I
=
H T ( e )
R
1
r
=
0
( 2 )
where
H A
ah/ax
denotes
the
Jacobian
matrix,
R =
d i a g ( a t )
an d
the
measurement
residual
vector
i s
b y
definition
.
A
where
W=
IBEHTR
1
an d
E -
( H T R - l H ) 1
( 3 ' )
In
th e
absence
of
B D ,
the
measurement
residual
vector
i s
distributed
:
N ( 0 , W R W T T ) =
N ( O , W R )
The
presence
of
BD
i s currently
detected
through
one
of
th e
variables below
:
the
weighted
residual vector
rW
R - r r
(4 )
th e
normalized
residual
vector
rN
=
r
with
D
iag WR)
5
-
th e
quadratic
cost
function
J ( e )
=
r T R - U
r
=rWrW
( 6 )
2.2.
DETECTABILITY
OF BA D
DATA
F or any
detection test,
th e probability
6
of non-
detecting
BD
i s given
by
6
=
prob
(ji|
-
8/20/2019 Mili_Bad Data Identification Methods in PS State Estimation_A Comparative Study
2/13
3 0 3 8
where
; i s
th e
statistical
variable of c o n c e r n
( r w i ,
rNi
o r
J
)
with meanvalue
1 p
and
variance
C 2
;
X i s
the
detection
threshold.
Hence,detecting
the
presence
of
BD
requires
that
[ 2 4 1
| 1 |
>
X-N
N 7 )
Let us
now
consider th e
case of a
s i n g l e
B D .
D e f i n i t i o n .
Given
a n
error
probability B
t h e
d e t e c t a -
b - i Z l i t y t h r e s h o l d
o f t h e
i-th
measurementis
defined
as
t h e
minimal
m a g n i t u d e
of th e
corresponding
w e i g h t e d
error
e
necessary
to
detect th e
presence
of
BD with
a
probability
Pd =
1-S
of success
( t h e
other
measurements
being affected b y g a u s s i a n
n o i s e s ) .
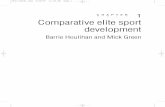
F i g .
1
shows
th e
value
of
th e
relative
d e t e c t a b i l i t y
threshold
corresponding
to
th e
rw, rN
and
J
tests
as
a function
of th e
W i i
coefficient.
These
curves,
p l o t -
ted
via e q .
( 7 )
, -
i n s p i r e
th e
following
comments
( i )
i n
presence
of
a
s i n g l e
BD
( a n d
in th e absence
of
c r i t i c a l p a i r s
[ 2 1 ] ) ,
t h e most
p o w e r f u l
test i s
the
on e based
on
r N ;
recall moreover
that within
th e
linear-
ized
approximation
an d
p r o v i d e d
that
e j
=
0
( V j
i ) ,
the
largest
normalized residual,
I r N i l m a x ,
c o r r e s p o n d s
to
th e
erroneous
measurement.
This
i s
g e n e r a l l y
not
true
fo r
I r W .
I m a x
*
Hence
th e
advantage
of
r e l y i n g
on
normal-
ized
r a t h I r than
on
w e i g h t e d r e s i d u a l s ;
( i i ) when th e
local
redundancy
d e c r e a s e s ,
W i i
decreases
t o o ; ,
h e n c e ,
in order
to
be
d e t e c t a b l e ,
t h e
e r r o r s
m us t b e
l a r g e r ;
( i i i )
critical
measurements
a re characterized
b y
W i i =
0:
their
errors
are
thus
undetectable.
Indeed such measure-
ments
have
a l w a y s
n u l l
r e s i d u a l s ;
( i v )
i n
t h e
p r e s e n c e
o f
r i u l t i p l e B D , p r o p e r t y ( i )
d o e s
not
hold
anymore. I n d e e d ,
i n
this
case,
E [ r N i ]
i s
a
linear combination
of
the
gross
e r r o r s
( e . g .
s ee
( 2 . 1 1 )
in
[ 2 1 1 ) ;
( v ) d e s p i t e
th e
above risk
o f erroneous
j u d g e m e n t ,
th e
rN
criterion
s t i l l
remains t he m o s t reliable one;
i t will
t h e r e f o r e
b e
u s e d
t o
determine t h e
s u s p e c t e d
m e a s u r e -
ments :
these ar e
measurements
p o s s e s s i n g
normalized
residuals
larger
than
the fixed threshold.
2 . 3 . TOPOLOGICAL
IDENTIFIABILITY
OF
BA D DAT A
Given
a se t of
BD
i t i s
i n t e r e s t i n g
to
determine
whether
th e measurement
c o n f i g u r a t i o n
is
rich
e n o u g h
to
allow
their
proper
identification.
D e f i n i t i o n .
A s e t o f
B D i s
s a i d
t o be
t o p o Z o g i c a Z Z y
i d e n t i f i a b l e
i f t h e i r
s u p p r e s s i o n
does
n ot c aus e
-
s y s t e m ' s
u n o b s e r v a b i l i t y ,
-
creation
of
critical
measurements.
P r o p o s i t i o n .
To b e
identifiable
a
set
of
BD
must
neces-
s a r i l y
be
t o p o l o g i c a l l y
identifiable.
This
proposition expresses
th e
f o l l o w i n g
evidence
in order
to
i d e n t i f y
f
BD
among
m'
measurements,
i t i s
necessarythat
f
<
m ' - n '
,
where
n ' i s
t h e number
of unknows
to be estimated.
Note
t ha t t hi s
i s a
necessary
but not
suffi-
cient
condition
fo r
proper
i d e n t i f i c a t i o n ;
indeed numer-
i c a l
aspects
have
also
to
b e taken into
account.
A reliable
identification
p r o c e d u r e
should
b e
able
to
recognize topologically
unidentifiable
B D ;
i n such
cases, i t s ho ul d d ec la r e the
problem
unsolvable
an d w a r n
th e
operator
a g a i n s t
th e
lackof
reliabilityof
th e
avail-
able
state
e s t i m a t e ,
rather
than
g i v e
unusable r e s u l t s .
2 . 4 .
MEASUREMENTS
B E CO MI N G C R IT I CA L
D U R I N G
ELIMINATION
Id en tif i catio n me tho d s
based
on
( s u c c e s s i v e )
elimin-
ations
of
measurements
may
lead
to situations
where t h e
remaining
measurements
a re critical : the detection
tests
a r e then
n e g a t i v e ,
since
e rr or s o n critical measurements
a r e undetectable. Now
i t
i s
p o s s i b Z e
that e r r o r s
remain
o n these critical
measurements,
which
would
h e a v i l y
affect
th e
accuracy
of
the final
state estimate
( t h e
r e -
maining
errors
being
no
l o n g e r f i l t e r e d ) .
In
such
c a s e s
neither
of
th e first two
o b j e c t i v e s
of
§
2 . 5 i s attained.
Note
that
n e w
critical
measurements
may
be
gener-
a te d b ec aus e
o f :
th e
presence
of
t o p o l o g i c a l l y
unidentifiable
BD,
-
the
undue
e li mi na ti on o f valid
measurements.
w
-
a i s
th e
false
°
alarm
p r o b a b i l i t y
0 0 2
0 . 4 0 . 6 0 . 8 1 . 0
F i g . 1 :
D e t e c t a b i l i t y
t h r e s h o Z d s
v s .
W i j
In
order to enhance the
r e l i a b i l i t y
of
the
final
data
base,
we
propose
th e
f o l l o w i n g p o s t - e l i m i n a t i o n
procedure
:
( i )
search fo r
al l
measurements
become
critical
after
elimination;
( i i )
ad d
these critical measurements
to the list
of
th e
measurements
declared
f a l s e ;
( i i i )
determine
th e
estimates which
would
be
affectedby
possible
errors
on th e
critical measurements
and
j o i n
this
qualitative
information to the
f in al d at a
base.
Step
( i )
c an be
carried out
by s i m p l y
c o m p a r i n g t h e
lists of critical measurements
b efor e a nd
after
elimina-
t i o n .
The
above
procedure may apply
to
any
identification
m et ho d w hi ch i nv ol ve s
elimination
o f m e a su re m e nt s .
2 . 5 .
P E R F O R M A N C E
A S S ES S M E N T C R I T E R IA
F iv e c ri te ri a
are
selected f o r
a s s e s s i n g t h e q u a l i t y
of th e v ario us i d en tif i cati on
methods.
Th e
first
three
of them
ar e
th e
main
objectives s o u g h t by any
identifi-
cation
approach
as
s u c h .
Th e
two others concernits
prac-
tical
f e a s i b i l i t y ,
i . e . th e
a p p l i c a b i l i t y
r e q u i r e m e n t s .
L o c a c U z a t i o n
o i
t h e
B V
:
a b i l i t y
t o
l o c a l i z e e xa c t -
l y
th e
BD,
or
at least
to
furnish
a list
of
suspected
measurements
which includes
al l
the
BD
and
as
fe w
a s
possible
valid data.
C o t e c t i o n
o J _ t h e _ n a . t
d a t a o bae
: t h e
a p t i t u d e
fo r
c l e a r i n g
th e final d at a b as e
i s
of
great p r a c t i c a l
i m p o r t a n c e
and one of
th e most
essential
tasks
of t h e
overall state
estimation
process.
R e o S o n i i o
o _ p a g e g c a y _ u n d e n t i e a b t e
BD:
whenever
such
BD
a r i s e ,
th e
a l g o r i t h m
should
be
able
to
draw
up
an
as reduced as
possible
list
of
suspected
mea-
surements while
containing
al l th e
B D ;
moreoverit
should
w a r n th e
operator
of
it s
unability
to
i d e n t i f y
the sus-
pected
data
which
have
become
critical and
t h e r e b y
th e
p o s s i b l e
existence
o f
e r r o n e ou s estimates
rather
than
provide
him with
misleading
results.
T m p t e m e n t a t i o n _ & e q y W L e m i e n t s
:
p r a c t i c a l
consider-
ations
o n
th e
i m p l e m e n t a t i o n
and
d e s i g n
should
be
taken
into
account,
such
as
s i m p l i c i t y ,
a d a p t a b i l i t y t o
s y s t e m
m o d i f i c a t i o n s ;
to
a
lesser
e x t e n t ,
memory
s t o r a g e .
C o m p y , t e x t
Ve
i t
s h o u l d b e a s short
as
p o s s i b l e
so
as
to
c o m p l y
with th e real-time
r e q u i r e m e n t s
of
th e
overall
o p e r a t i o n .
3 . BAD DATA
I D E N T I F I C A T I O N .
BRIEF
OVERVIEW
Tw o criteria
a r e
used
to
c l a s s i f y
the various
BD
i d en tif i catio n me thod s
:
-
the nature of th e statistical
tests
of concern,
deter-
mined
b y
the variables
t h e y i m p l y ,
-
the
way
of
e l i m i n a t i n g
BD an d
c l e a r i n g
the data
base.
The first criterion
leads to
d i s t i n g u i s h
H TI
from th e
other
m e t h o d s ,
whereas the
second
leads to
r e g r o u p i n g
th e
various
nonquadratic
criteria
in
a
class
distinct
from
that of
the
elimination
p r o c e d u r e s .
Authorized licensed use limited to: to IEEExplore provided by Virginia Tech Libraries. Downloaded on January 16, 2010 at 13:31 from IEEE Xplore. Restrictions apply.
-
8/20/2019 Mili_Bad Data Identification Methods in PS State Estimation_A Comparative Study
3/13
3 . 1 .
IDENTIFICATION
BY ELIMINATION
( I B E )
Conceptually,
this
identification i s
th e continua-
t i on of t h eB D
d et ec ti on s te p
which
i s
a
global
criterion
implying
th e
residual vector
r . T he
leading
idea i s
that
in
th e event of
a
positive
detection
test,
a
first
list of
candidate BD
i s
drawn
up
on
th e
basis of an rN
( o r
r W
test,
t he n s uc ce ss iv e
cycles
of elimination-
reestimation-redetection are
performed
until the
detec-
tion test
becomes
negative.
Two
subclasses
may be
distinguished corresponding
to th e elimination of
single
or of
grouped
BD .
I ntro-
duced
by
Schweppe et a l .
[ 1 ]
almost
at the
same
time
with th e state estimation
i t s e l f ,
the
f or me r c on s is t s
in
eliminating at
each
cycle th e
measurement
having
the
largest magnitude of the
normalized or
weighted
residu-
a l .
As fo r
th e
grouped elimination,
a
grouped
residual
s ea rc h h as been
p ro po se d b y
Handschin
et a l .
[ 3 1 ;
it
consists i n eliminating a group of suspected measure-
m en ts w hi ch s up po se dl y i nc lu de s
al l
B D , and
reinserting
them afterwords
one-by-one.
A no th er v ar ia nt
of these procedures
consists
in
solving eqs.
( 3 )
with
respect to on e or several suspected
measurement
e rr ors , t he n
in
c or r ec t in g t h em b y substract-
ing
t he s e e rr or s.
This
measurement error estimation
has
f ir st b ee n proposed b y A bo yt es and
Cory
[ 6 ] .
Later
o n ,
Garcia
et
a l .
[ 7 , 8 ]
have
explored
th e
simplified
way
o f
correcting
one measurement
at
a
time ( t h e one having at
each
step
the largest
I r N i l
)
a nd k ee pi ng the
W
matrix
constant
during
the
subsequent computations of
r N .
Note
that this
technique
has also been
a pp li ed b y Simoes-
Costa
et
a l . [ 1 4 ]
to
the
orthogonal row processing
sequential
estimator.
The work
b y Xi ang
Nian-de
e t a l .
[ 9 - 1 1 ]
has significantly
contributed to e l u c i d a t e
this
question.
These a ut ho rs h av e
brought up
the
singular
character of W , have proposed
it s partitioning so as
to estimate
only
s
( s <
m - n )
out of th e
m
measurement
errors.
Moreover,
they
have
clearly pointed outthe fact
t h a t
c o r r e c t i n g t h e s e
s
m e a s u r e m e n t s
a m o w n t s t o e Z i m i n -
a t i n g
t h e m .
A t t e m p t i n g
t o
i m p r o v e
t h i s
t e c h n i q u e ,
MaZhi-
q ui ang p roposed to
process
combinatorial
sets
of
sus-
pected
measurements
and
to
identify
th e
BD
through a
detection test
based
on an
interesting
formula
he e st ab -
lished
in R e f .
[ 1 2 1
( s e e
§
4 . 1 .
3
b e l o w ) .
Now,
becauseof
th e
equivalence
between
correction
and
elimination,
th e
fact
remains
that a ll th es e
techniques
belong
to
the
class of
the
procedures by
elimination.
3 . 2 .
N ON QU AD RA TI C CR I TE RI A ( N Q C )
Almost in parallel
with th e a b ov e a pp ro ac h,
theNQC
h av e s ta rt ed
b e ing de ve loped
and
explored.
The
idea of
this
m e t h o d o l o g y
differs
t o t a l l y
from th e
preceding
o n e :
here th e
identification-elimination of BD i s
part of th e
state
estimation
itself.
Th e
r e j e c t i o n
of
the
suspected
measurements
depends
upon
the
magnitudes
of th e
( n o r m a l -
ized or
w e i g h t e d )
residuals :
th e
larger
th e
residual,
th e
smaller
th e
weight
allocated to
th e
corresponding
measurement, an d th e
larger th e degree of it s
r e j e c t i o n .
Initiated
by Me rr il a nd S ch we ppe
[ 1 5 1
th e NQ C meth-
ods have been
further
developed
and
analyzed by Handschin
et
a l . [ 3 ]
and
by
Muller
[ 1 7 1 .
More
r e c e n t l y ,
a
compara-
tive
study
of some of
them
has
been carried
out
by
Lo et
a l . [ 1 9 1
an d
by
Falcao et a l . [ 2 0 ] .
3 . 3 .
HYPOTHESIS T E S T I N G IDENTI FICATION ( H T I )
Unlike the
two
previous methodologies,
H TI uses in -
dividual
c r i t e r i a , particularized
to
each
suspected
mea-
surement.
The variables of concern here
are th e error
estimates,
e s
,
of
some
of
th e
suspected measurements;
these
are
evaluated
through
a
suitable
partitioning
of
e q . ( 3 )
an d
a
linear
estimation. Exploiting
th e s ta ti s-
tical
properties
of
each e
through
an individual
identification
testing
allows
deciding
whether
the cor-
responding measurement
i s
erroneous
or not.
T hi s m et ho d
along
with tw o s tr at eg ie s f or t ak in g d ec i si on s
i s devel-
oped
i n
R e f . [ 2 1 ] .
3 0 3 9
4 .
BA D
DATA
IDENTIFICATION. C R I T I C A L . ANALYSIS
4.1.
IDENTIFICATION
BY
ELIMINATION
( I B E )
4.1.1.
Description
The
me th od s o f
this class re ly
on
th e
r W
or the
rN test.
The
c ho ic e b et we en
r W
and rN
implies a
trade-
off
between good applicability features
(simplicity,time
an d c or e saving s)
and
reliability. Generally, the po or
performances of
r W
(apart from
the
special
c a s e of
high
r ed un da nc y a nd
single B D ) make th e rN test wort h-con -
ceding
th e additional implementation effort.
Neverthe-
less,
th e la tt er
i s
no t reliable e n ou gh e it he r;
i n d e e d ,
in
case
of multiple
interacting
BD , th e one-to-one cor-
respondence
between
largest
I r N
and e rro ne ous m ea -
surement
stops
being
guaranteed
: valid
m e a s u r e m e n t s
may
thus be declared
f als e a nd
vice-versa.
Note
that th e decision is
taken on
a
global
basis
given
by the sole detection
test,
which
just
informs
about
th e existence of BD among th e measurements, but
does
n ot i nd ic at e
whether
the
eliminated
o n e s are
actu-
ally
erroneous.
4.1.2. Assessment
P u o s
*
it
is sim ple , since the
only
computation
it
needs
be-
sides
estimation
i s
that of
residuals;
*
it i s capable to wa r n
th e operator
that
the
BD are
topologically
u n i d e n t i f i a b l e ,
provided
th e
method
of
§ 2 . 4
i s implemented.
*
it
i s
heavy since it requires a
series of reestima-
tion-detection a ft er e ac h
elimination;
this
m ay lead
to computer times incompatible
with
th e on-line
re -
quirements;
*
it
may
lead
to a
degradation of the measurement
c o n -
figuration
and a
subsequent
drop
of th e
power
of
th e
detection
test
( s e e
f i g . 1 ) ; t h i s in t ur n ma y
cause
an
important probability of
non-detecting remaining
BD
(especially w he n they be com e
critical);
*
it
can
provoke an undue elimination
of valid m e a s u r e -
ments causing not only
a
rough identification
but
also a
drop of th e detection test
power.
When
using
the rN test,
this
situation
arises in th e
case of
m ul ti pl e i n te r ac t in g
BD or of
BD located
in regions
with lo w local
r e d u n d a n c y , i . e .
i n the
case
o f s tr in-
gent
identification conditions.
On the other
hand,
th e
r w
test
ma y
lead to a degradation even
i n
mild
situations.
4 . 1 . 3 .
R em ar ks o n th e correction of measurements
Within t h e
p ro c ed ur e b y e li mi na ti on ,
two variants
may be distinguished.
The first
consists in
correcting,
after each
reestimation, th e
measurement
having
th e
largest
trNi[
by substracting
from
i t s
value th e
esti-
mate
e
- 1
e i
=
wi
r i
( 8 )
ii1
while
keeping
c on st an t t he
W
matrix.
The second v ar i an t c o ns i st s i n
correcting a group
of
s
selected measurements among th e
suspected
ones by
subtracting
from
their values
th e
estimates
where :
es
=5e
rs
= r r 5
( 9 )
s
:
denotes
th e selected measurements,
i s
t h e
corresponding
( s Xs )
-dimensional
sub-
matrix of W
r s
: i s
th e
corresponding
s-dimensional
subvector
of
r . .
To avoid
successive reestimations
of
th e
state
vector,the
following
correction
formula of
J ( ' )
pro-
posed
by Ma
Zhi-quiang
[ 1 2 ]
can
be
used
J(XC)=
J(x)
- s r s
es ' ( 1 0 )
H e r e
xc
i s
the new s ta te v ec to r
obtained
from
the mea-
surements corrected
b y
e s
( i . e . e l i m i n a t e d ) .
T h e r e f o r e ,
2
J
x c
has
a
x
_ d is t ri b ut i o n w i t h
( m - n - s )
degrees
of
freedom.
Authorized licensed use limited to: to IEEExplore provided by Virginia Tech Libraries. Downloaded on January 16, 2010 at 13:31 from IEEE Xplore. Restrictions apply.
-
8/20/2019 Mili_Bad Data Identification Methods in PS State Estimation_A Comparative Study
4/13
3 0 4 0
The advantages
an d
d ra wb ac ks o f th e
a bo ve te ch -
niques are
summarized hereafter.
P U 4 o
*
The
main
attractiveness of t hese
techniques
i s
that
th e
correction
does
not
affect
the
measurement
con-
figuration. Hence,
th e
gain
matrix can be
kept
con-
stant
during
th e
successive
reestimations of
the whole
ide nt ific a t ion pr oc e dur e , w hi le k ee pi ng
th e
goodness
of the minimization procedure convergence.
On th e con-
trary,
eliminating
BD
ma y
deteriorate
this convergence.
It ma y even happen
that
such a procedure which
con-
verges properly through th e above t e c h n i q u e , diverges
when
eliminating
th e
BD .
C o n s
I n addition
to the
weaknesses
of
thevery procedure
by
elimination
listed
a b o v e ,
t h es e c or r ec t io n
techniques
induce th e
following
disadvantages
As
fo r th e
single
correction-elimination
*
there is a risk
that
some measurements
previously
cor-
r ec te d b ec om e
erroneous
a ga in . I nd ee d, in
order
that
correction and elimination
to be
equivalent
at
each
step, al l
th e ( s - 1 )
previously c o r r e c t e d
measurements
must be c o rr ec t ed a ga i n
along
with the lastone
through
e q . ( 9 )
( s e e Ref. [ 2 1 ] ) ;
*
there is
a
greater risk to declare f a l s e a
valid
mea-
surement
because
of th e
approximation
of
the
normal-
ized residual.
I nd ee d, t he variances
of
th e residuals
computed
on th e basis
of
th e
i n i t i a l
W
matrix
are no
longer valid
s inc e the
residuals
of
the
non corrected
measurements are
equal
to those
resulting
from the
actual
elimination
of th e corrected measurements and
th e residuals of th e corrected ones are zero ( i f th e
correction
is
carried
out o nl y t h ro ug h
e q .
( 1 0 ) ) .
Concerning
the
grouped correction-elimination
*
th e
computation
time m ay
increase
significantly ( a n d
even
become
prohibitive with
the
n um be r o f
tim es the
linear system
g iven b y ( 8 ) and ( 9 ) i s solved), even
if
a
grouped residual search
i s
used.
4 . 2 .
IDENTIFICATION BY
N W C
4 .2 .1 . D es c ri pt i on
The NQ C
methodology
consists
in
minimizing
the
cost
function
m
J
( x )
=
f i
( r i / a i )
( 1
1 )
i = 1
where
f i
i s
equal
to
r l / 4 G
when
I
r X i
-
8/20/2019 Mili_Bad Data Identification Methods in PS State Estimation_A Comparative Study
5/13
3 0 4 1
E [ 6 s i ]
=
esi
( 1 4 )
The
H TI
method
may
b e e xp lo it ed
through either
of
the t wo strategies
proposed
in
Ref.[21]
:
S t A a t e g y _ q
:
the decision is taken
witha
fixed
type
a
error
probability
of
declaring
false
a measurement
w h i c h
is valid.
S t A a t e g y _ _
th e
decision is
t a k e n with a f ix ed t ype
6
error
probability
of declaring valid
a measurement
w h i c h
is
false.
More
explicitly,this
strategy
consists
in
ad-
justing
the
parameter Vi
fo r each
selected
m e a s u r e m e n t
and
in
refining the successive
s
lists by
selecting
at
each cycle
only th e
measurements
which have
yielded
a
positive hypothesis
testing.
4.3.2. A s s e s s m e n t
Puz :
*
The
H T I
method is
generally
able to
identify
all
BD
within
a
si ng le s te p
( o r
at
w o rs t w it h in
two
steps).
This
is especially
true for
strategy
6
.
Concerning
strategy
a
,
experience
h as
s ho wn t ha t,
when all
th e
BD
have
not
b e en i d en t if i ed
by
the
first
test, a
sec-
ond one, performed
after
a
reestimation,
is
sufficient
to
complete
th e identification.
Note that
in both
strategies,
situations
where
all
BD have n ot b een
se-
lected
may
lead
to a
slightly larger
number
of r e e s t i -
mations.
*
This method
i s
able
to
identify strongly interacting
BD .
This important
advantage
results from
eq.(14)
which
shows
that,
unlike
the
residuals,
th e estimate
e s i
is
n o t
affected
by
th e
presence
of
BD
among
t h e
other
measurements.
In other
words,
the
very
n o t i o n
of interacting
BD
becomes
meaningless.
*
The
method
treats
properly topologically
unidentifi-
able
BD. Indeed,
the
procedure
of
§
2. 4
applies
to
the H IT method
as
well.
C o n z :
*
There
is a r isk
of
poor
identification,
corresponding
to
the
case w h e r e
one
or
several
BD are n o t s el ec te d.
This risk
can
however
be alleviated
through
appropri-
ate techniques
[ 2 1 ] .
*
T he m et ho d requires
the
computation
of
the
W s s
matrix,
whereas
the other procedures
merely
need
th e
diagonal
of
the
W
matrix.
Note
h ow ev er t ha t
t h e
technique
pro-
posed
in
[ 2 1 1
avoids necessity
of computing
the
com-
plete
E
matrix.
5 .
COMPARING
SIMULATION
RESULTS
5 . 1 .
SIMULATION
CONDITIONS
5 .1.1.
T h e test
systems
All the identification
methods
have
b ee n t es te d
on
two
test networks and
two
real
systems,
namely
the
IEEE
30-bus
an d
118-bus
n et wo rk s, a nd
a
B e lg i an 4 00 / 22 5 /
150/70
k V and the Tunisian 220/150/90
kV
power
systems.
F o r
the former
two,
the
m e a s u r e m e n t configurations
have
b ee n f ix ed randomly
a nd f ur th er adjusted
so
a s t o
comply
with observability
constraints
while keeping
an
overall
redundancy
of
about
2
. As for
th e
two others,
their
(actual)
configurations have
a
redundancy
of
1.9
( B e l -
gian)
and 2.8
(Tunisian).
The
variety
of
the
systems
characteristics (with respect
to size, topology,
elec-
trical
parameters and
measurement
locations)
allows
drawing
valid conclusions as
regarding BD
analysis.
F o r
purposes
of illustration,
the
well-known
IEEE
30-bus system is chosen
here;
its d ia gr am along with
the
adopted
measurement
configuration
and
characteris-
tics
are
shortly
described
in
the Appendix.
5 .1.2. The
tested
methods
T h e
results
reported
b e l o w
are
merely
concerned
with
the
most
important
v a r i a n t s o f
e a c h
of
th e
t h r e e
identification
methodologies.
S om e
specific
implementa-
tionquestions
are also
discussed.
I B E .
Because
o f
the
inappropriatness
o f th e
grouped
elimination,
only
t h e
single
e l i m i n a t i o n
scheme
is
con-
sidered
here.
However,
in o r d e r t o d e c r e a s e
th e
n u m b e r
of
successive
reestimations
(and hence
to save computer
time),
the
a ct iv e an d
reactive
m e a s u r e m e n t subsets
are
processed
in
parallel,
i.e. an a ct iv e a nd
a reactive
measurements
are eliminated a t the
same time
( a s
pro-
posed
in
Ref.
[ 7 ] ) . This
shortening
is based
on
the
hy-
pothesis
of
decoupling between
active
and reactive
vari-
ables
in E. H. V .
power systems.
NQC. When
th e detection
tests reveal
presence
of
BD
among
the measurements,
a
new estimation
is performed
based
on one
of
the
proposed
NQC.
T o overcome
th e diffi-
culty of
local minima, th e
s t ar ti n g p oi n t
of the itera-
tive
procedure
i s
th e
estimate
given by the WLS
estima-
tor ( a s proposed
i n Ref. [ 3 ] ) .
The
threshold
y -
which determines
the
transition
from
quadratic
to nonquadratic
estimation
has b e e n
taken equal
to
5 .
Experience h as sh own
that this
choice
i s
reasonable;
indeed a t o o
s ma ll v al ue
fo r this thres-
hold leads
to the
rejection
of
to o many measurements
a nd h en ce
to convergence
problems,
whereas a
to o large
v al ue r e su lt s in a
poor
BD
rejection.
The
study of NQC h as
n ot
b ee n e xt en de d
to the case
of
a threshold varying
during
th e iterative
process;our
experience
makes us think
that this
refinement
is no t
capable
of
significant improvements.
H T I . The
elements of
the
W ma trix n e e d e d
fo r th e com-
putation
of the
n o rm a li z e d r e si d ua ls
and for
the
Wss ,
submatrix
are
obtained
from the
available jacobian H
and gain
G
matrices.
In
practice,
H and G
are kept
constant
after th e first two iterations
i.e.
they
are
computed
and/or factorized
only
twice). Experience
has
shown th at th is does
no t
affect
the accuracy
of
W s s
provided
that
H
and
G are
kept
constant
at th e
same
iteration
step.
T he number
s
of selected
m e a s u r e m e n t s
is arbi-
trarily limited
to 3 0 but -when
the
test
on J(Xc)
( s e e
§
4.1.3)
detects
the presence
of BD
among
the remaining
measurements, groups
of 1 0 additional
m e a s u r e m e n t s
are
successively
appended
to
the
previous
selection.
Concerning
th e strategy
a
,
th e pa ra me te r
V has
been t ak en e qua l to
2
(a=
4.6 ).
The
choice of
a
h i g h e r
value
( 3 . 0
fo r example)
could
result
i n
an
incomplete
BD
identification;
indeed,
in the presen ceo f inaccurate
estimates
& S i
,
the corresponding
S error probability
is
to o
high.
This
is
one
of the
reasons
for
considering
strategy
6
.
As
fo r
strategy
$
,
the
parameters
of
concern
take
on the f o ll o wi n g v a lu e s
H e n
I e s . I =
40
,
5=
1
N=
-2.3 2 and
(N
Ia)max=
3
-
1
15
4 u
-
2 . j
v3
l I i i _ l
i
=
with
0<
vi<
3
I
( 1 5 ' )
5 . 1 . 3 .
The test cases
I n
o rd er for an
identification method
to
be prac-
tically effective,
it
has to
pass
the
e x a m on
multiple
BD .
The
cases
chosen
to be
reported
below pertain
to
th e three
possible
types
of
such
BD
1 s t case
:
multiple
interacting
BD
located
around
th e
same n o d e ;
2nd
case
: multiple
noninteracting
BD
having
very
dif-
ferent
m a g n i t u d e s
and
belonging
to
poor
an d rich
areas;
3 r d
case
:
topologically
unidentifiable
BD.
The above
list
is certainly no t
exhaustive
but nevertheless
suffi-
cient
to illustrate th e
considerations
of
Section
4 .
5 . 2 . F I R S T
C A S E
: M U L T I P L E
I N T E R A C T I N G
B A D D A T A
Four
interacting
BD
s u r r o u n d i n g
node
1
have
been
introduced.
Their
degree
o f i nt er ac ti on
is low
to
moder-
T A B L E
I C H A R A C T E R I S T I C S
O F
T H E
F O U R I N T E R A C T I N G
B D
B a d
d a t a
A c t u a l V a l u e
M e a s u r e d V a l u e
e 1 = z
- h j ( x )
e |
h i
( x )
z
e
F L P
1 - 2
1 7 7 . 3
0 . 0
- 1 7 7 . 3
1 1 8 . 2
F L Q
1 - 2 .
- 2 5 . 7
3 0 . 0 5 5 . 7
3 7 . 1
I N P
1
2 6 1 . 2 0 . 0 - 2 6 1 . 2
1 7 4 . 1
I N Q
1
- 2 7 . 1 3 0 . 0
5 7 . 1 3 8 . 1
,w
Authorized licensed use limited to: to IEEExplore provided by Virginia Tech Libraries. Downloaded on January 16, 2010 at 13:31 from IEEE Xplore. Restrictions apply.
-
8/20/2019 Mili_Bad Data Identification Methods in PS State Estimation_A Comparative Study
6/13
3 0 4 2
T A B L E I I
S U C C E S S I V E
L I S T S
O F S U S P E C T E D
M E A S U R E M E N T S
I N
T H E S IM PL E
E L I M I N A T I O N P R O C E D U R E T H R O U G H T H E r N T E S T
l s t e s t i m a t i o n 2 n d e s t i m a t i o n 3 r d e s t i m a t i o n 4 t h e s t i m a t i o n 5 t h e s t i m a t i o n
A c t i v e R e a c t i v e
A c t i v e
r N I
J R e a c t i v e rN| A c t i v e
r N i
R e a c t i v e
r N i
A c t i v e
r N .
R e a c t i v e
r N i
A c t i v e
r N
N - R e a c t i v e r N i
F L P 2 - 1 - 8 1 . 7 F L Q 2 - 1 2 8 . 0 I N P 2 - 7 1 . 8 I N Q
2
2 9 . 3 F L P 1 - 3 3 9 . 5
F L Q
4 - 3 1 0 . 8
I N P
1 - 1 0 . 6
I N I )
1 - 7 4 . 1
F L Q 1 - 2
2 2 . 7
F L P
1 - 3
5 6 . 6 F L Q 1 - 2 1 5 . 7 I N P 1 - 2 3 . 6 F L Q 1 - 3 - 6 . 3 F L P 4 - 3
1 0 . 6
I r N I l
<
3
I r N i l
<
3
I r N i l
<
3
F L P
1 - 3 4 9 . 8
IN Q 1 1 8 . 2 IN P 1
- 4 0 . 5 I N Q
5 1 3 . 4
F L P
4 - 3 - 2 2 . 1 F L Q
6 - 2 - 4 . 0 F L P 1 - 2
1 0 . 6
F l P
1 - 2 - 4 6 . 7
I N Q 2
1 7 . 0
F L P 4 -3
- 2 8 . 7
F L Q
1 - 3
- 1 2 . 0 F L P
1 - 2 1 0 . 5
F L Q
1 - 2
3 . 2
IN P
2
- 4 1 . 6 F L Q 1 - 3 - 1 0 . 5 F L P 1 - 2 - 2 4 . 0 F L Q 4 - 3 1 0 . 6 F L P 2 - 6 - 7 . 8
J()=
1 5 2 1 1 . 6 >
8 7 . 0
J ( 2 ? = 7 6 9 3 . 8
>
8 4 . 5 J ( ± )
=
1 7 5 3 . 3
>
8 2 . 1 J ( 2 ) = 1 5 6 . 2
>
7 9 . 6 J ( £ )
4 3 . 5
<
1 8 . 3
ate.
Their
characteristics are
given
in
Table I
( v a l u e s
i n M W / M V a r ) .
They
are
of
both
t y p e s ,
IN
( i n j e c t i o n )
and
FL
( f l o w ) ,
of
P / Q
(active/reactive p o w e r ) .
5 . 2 . 1 . Identification by elimination
5 . 2 . 1 . 1 .
E t i i n a t i o n
b o 6 e d o n
r N
The identification procedure
requires four succes-
sive
elimination-reestimation
c y c l e s ,
after th e alarm of
th e
detection
test. They
are
summarized in Table I I . The
elimination
of
th e
fourth active measurement
makes
crit-
ical
two others. T he final list
of m e a s u r e m e n t s
labelled
false
i s
thus
the
following.:
-
eliminated : FLP
2 - 1 ,
FLQ
2 - 1 ;
I NP
2 ,
INQ 2 ;
F LP
1 - 3 ,
FLQ
4 - 3 ;
INP
1 ;
-
become
critical
: F L P
4 - 3 ,
F LP 1 - 2 .
T he final state estimate i s
th e
one
obtained
at
th e
en d of
the
fifth
estimation;
some characteristic
values
ar e
reported
in
column four of Table
IV ( s e e next
page).
The
r es ul ts i ns pi re the following comments.
( i )
Both
erroneous
active measurements
ar e
present
in
th e final
l i s t ,
even if
one
of them has
been
included
thanks
to
th e
critical
measurement analysis.
( i i )
T hr ee v al id
measurements
have
i nc or re c tl y b ee n
de-
clared false.
( i i i ) None
of
the
two
erroneous
reactive m e a s u r e m e n t s
has
been
identified.
Indeed the
improper
elimination
of
three
valid
( r e a c t i v e )
d at a c au se d
an
important
weaken-
in g
of the measurement
configuration.
This
in
turn
pro-
voked a
decrease
in the
value
of
th e
W i i
coefficients
and
hence
in the
detection
capability,
as described in
§
2 . 2 .
A
more
d e ta il e d a na ly si s
of
this
question
i s
given
below.
( i v )
The final state
estimate
i s
completely
e r r o n e o u s
in a certain
neighbourhood
of node
1 ,
since
F LP
1 - 2 ,
FLQ
1 - 2
an d
IN Q
i
have not been eliminated.
I t i s
interesting
to
explore
f ur th er t he mechanism
of detection
capability
decrease
by considering
the de-
gree
of BD
interaction.
Let
e i ( r e s p .
e 2
)
be
the
weighted
error
affecting FLQ
1 - 2
( r e s p . INQ
1 ) .
We
de -
termine
th e domain
D 1
of
the
two-dimensional
space
( e j , e 2 )
in
which the
probability
to detect the
presence
of
BD
i s
smaller
than
a
given
value
Pd
( P d =
0. 9 here-
a ft er , h en ce
NPd
=1.28
) .
Using eq . ( 7 )
and
taking
into
a cc ou nt t ha t
Npd
=-NS
yields
I v < W l
e
e 2
<
X + N P
( 1 6 )
½
I 1 =
I21 e j
+
2
e
<
X + N P d
( 1 7 )
Substituting
into
( 1 6 )
and
( 1 7 )
the values
of the
W i j
coefficients
before
any
elimination
( s e e
Table
I I I )
yields
-
_ 4 . 2 8
<
0.886e;
-
0 . 3 1 0
e
<
4 . 2 8
( 1 8 )
-4.28
<
- 0 . 3 8 0 e j
+
0.724 e2
<
4.28
( 1 9 )
These
inequalities define the domain
D 1
plottedin Fig.3.
T A B L E
I I I
-
S U C C E S S I V E V A L U E S
O F
W - M A T R I X T E R M S
R E L A T I V E
T O B D
B e f o r e A f t e r e l i m . o f
A f t e r
e l i m i n a t i o n o f
a n y
e l i m i n a t i o n
FL Q
2 - 1
a n d
I N Q
2
FL Q 2 - 1 ,
I N Q
2
a nd
F L Q
4 - 3
F L Q
1 - 2
I N Q
I
F L Q
1 - 2
I N Q
1
F L Q
1 - 2
I , N Q
1
F L Q
1 - 2
0 . 7 8 5 0 . 5 0 5 6 4 - . 4 3 0
. 3 4 4
0 . 0 3 3 0
I N Q
1 -
0 . 2 7 5 0 . 5 2 4
- . 4 3 0 0 . 3 8 2
-
4 . 3 3 0
0 . 3 3 6
P
>90
The relatively restricted extent of
D ,
denotes
a
good
ability
of
BD
detection.
On the
other
hand, substituting
th e
values
of
t h e
W i j
coefficients
after
elimination
of
F LQ 2 - 1 ,
INQ
2
and
FLQ
4- 3 ( s e e Table I I I )
gives
-4.28
<
0 . 5 8 7 e l
-
0.563 e2
<
4.28
-4.28
<
- 0 . 5 6 9 e i
+
0.580 e2
<
4.28
( 2 0 )
( 2 1 )
The corresponding
domain
D 2
i s
plotted
in
Fig.4.
On e
can
see that D2 i s
notably larger
than
D l
.
This
illus-
trates
th e
drop
of
th e
detection power test.
Note
that
th e
actual value
of
the
two
BD
( s e e
Table
I )
are
locat-
ed
j u s t
i n
D 2 ; this explains why
they
are
n o
l o n g e r
detected. Table
II I
shows
th e successive decrease
in
th e terms
of
concern
of
W matrix
resulting
from th e
successive eliminations,
and
hence
the
corresponding
increase
in the
degree
of
BD interaction.
5 . 2 . 1 . 2 .
E U i n a L t i o n
b o 6 e d
o n
r w
The results and
th e
conclusions
are
similar
except
that measurements
are not eliminated
in
th e
same order:
-
e l i m i n a t e d
:
F L P
2 - 1 , F L Q 2 - 1 ; F L P
1 - 3 , I N Q 2 ;
I N P
2 ;
F LP
1 - 2
F LQ 1 - 3 ;
-
become
critical :
I NP
1 ,
FLP 4 - 3 .
Moreover,
the
corresponding
domains D 1 and D 2
are
larger
than
in the-previous case.
5 . 2 . 2 .
I de n ti f ic a ti o n b y NQC
The
state estimates
g iven b y
th e
Q T ,
QL
and
QR
criteria through
the residuals
rW
ar e
reported
in
Table
IV
along
with
th e
a c t u a l
values of
th e
corresponding para-
meters.
Table
V lists
the suspected
measurements
( i . e .
those
characterized
by
I r W i J >
3 )
obtained
after
estima-
t i o n . The
s al ie nt r e su lt s
are
th e following.
Authorized licensed use limited to: to IEEExplore provided by Virginia Tech Libraries. Downloaded on January 16, 2010 at 13:31 from IEEE Xplore. Restrictions apply.
-
8/20/2019 Mili_Bad Data Identification Methods in PS State Estimation_A Comparative Study
7/13
3 0 4 3
T A B L E
I V
E S T I M A T I O N R E S U L T S
P R O V I D E D B Y
N Q C
A N D
B Y I B E
M ET H O D S ( M W , M V a r ,
p . u . ,
d e g r e e )
E l e c tr i c a l A c t ua l
I B E
N Q C
v a r i a b l e s
v a l u e s _ - - - - - - - - - - - - - T - Q - r -
Q
____
r w r N
Q T
Q L
Q R
M O D
1
1 . 0 6 0
1 . 0 5 2 1 . 0 5 8
1 . 0 6 5
1 . 0 6 3 1 . 0 5 8
F L P
1 - 2 1 7 7 . 3
- 1 9 . 9
0 . 0
1 5 5 . 9
1 6 6 . 5 1 7 4 . 6
F L Q 1 - 2
- 2 5 . 7
2 6 . 6
3 1 . 4
- 6 . 2 - 1 0 . 4
- 2 0 . 7
F L P
1 - 3 8 3 . 9 2 0 . 0
2 8 . 3 7 1 . 2
7 7 . 4
8 2 . 6
F L Q
1 - 3
- 1 . 4
6 . 3 - 2 . 7
7 . 6
4 . 9 0 . 9
I N P
1
2 6 1 . 2
0 . 0 2 8 . 3 2 2 7 . 1
2 4 3 . 9
2 5 7 . 1
I N Q
1
- 2 7 . 1 3 2 . 9 2 8 . 7
1 . 4
- 5 . 5 - 1 9 . 8
M O D 2 1 . 0 4 5
1 . 0 4 0
1 . 0 4 0 1 . 0 4 2
1 . 0 4 1
1 . 0 4 0
P H A
2 - 5 . 5
0 . 9
0 . 3
- 4 . 7
- 5 . 0
- 5 . 4
I N P
2 1 8 . 3 2 1 0 . 2
1 9 0 . 2 2 5 . 8 2 2 . 4
2 0 . 4
I N Q
2
3 1 . 9
- 3 6 . 6 - 4 0 . 2 2 0 . 2
2 0 . 6 2 9 . 7
M O D
3
1 . 0 3 3
1 . 0 2 9
1 . 0 4 8 1 . 0 2 5 1 . 0 2 6 1 . 0 2 7
P H A
3
- 8 . 1
- 1 . 7 5
- 2 . 7
- 6 . 7 - 7 . 4 - 8 . 0
I N P
3 - 2 . 4 5 9 . 1
5 1 . 1
9 . 7
3 . 8
- 1 . 4
i N Q 3
- 1 . 2 - 1 8 . 4
4 7 . 3 - 1 2 . 6
- 8 . 4 - 2 . 5
M O D
4
1 . 0 2 7
1 . 0 2 2
1 . 0 2 1
1 . 0 1 8
1 . 0 1 9
1 . 0 2 0
P H A
4 - 9 . 8
- 3 . 4 - 4 . 0
- 8 . 4 - 9 . 1 - 9 . 7
I N P
4 - 7 . 6 - 6 . 3 - 6 . 2
- 1 . 3 - 3 . 8
- 5 . 8
I N Q
4
- 1 . 6
- 4 . 5 - 6 1 . 2 - 1 1 . 2 - 8 . 1
- 6 . 5
T A B L E
V
S U S P E C T E D
M E A S U R E M E N T S
B Y
N Q C
A L O N G
W I T H T H E I R
r W i
O B T A I NE D A F T ER
E S T I M A T I O N
N Q C
S u s p .
m e a s u r t s .
r W l
S u s p .
m e a s u r t s .
r W _
I N P
1
- 1 5 1 . 4
F L Q
1 - 2
2 2 . 1
F L P
1 - 2 - 1 0 3 . 9
I N Q
1
1 9 . 1
F L P
2 - 1 - 1 1 . 8 F L Q
2 - 1 1 3 . 8
Q T
F L P
1 - 3
1 0 . 0 I N Q 2
7 . 9
I N P
2 - 4 . 4 F L Q 1 - 3 - 7 . 7
F L P
6 - 2
- 3 . 2
F L Q
4 - 2
3 . 7
F L P
2 - 5 3 . 1
I N P 1
- 1 6 2 . 6
F L Q
1 - 2
2 6 . 9
F L P
1 - 2
- 1 1 1 . 0 I N Q 1
2 3 . 7
Q L
F L P 1 - 3 5 . 9
F L Q 2 - 1
9 . 8
F L P
2 - 1
- 5 . 2 I N Q
2 7 . 7
F L Q
1 - 3
- 5 . 9
I N P
1 - 1 7 1 . 4 F L Q 1 - 2
3 3 . 8
O R
F L P
1 - 2
- 1 1 6 . 4
I N Q 1
3 3 . 2
F L Q 1 - 3
- 3 . 3
( i )
The
BD
have
not been
completely rejected
and th e
final
state estimate
i s still erroneous
in th e
vicinity
of
node
1
( s e e
Table
I V ) .
( i i )
Therefore,too many
valid measurements
are
suspect-
ed
at
the end of
th e
estimation. Note
that
th e
stronger
the
rejection ( a s
fo r
example
for the
QR
c r i t e r i o n ) ,
the smaller
the list of
suspected
measurements
( s e e
Table
V ) .
( i i i )
Except
f o r th e
QC
criterion
which has
shown un-
able
to
provide
an
estimation,
al l the
other
NQC
have
required
a
great
-
i f not
prohibitive
-
number of itera-
tions
( s e e
T ab le X b e l o w ) .
T hi s s low c on ve rg en ce
i s du e
to
the
r e j e c t i o n
of
al l measurements
around
nodel
which
in turn tends
to make th e network
numerically
unobserv-
able.
The
QC
criterion is
particularly
unreliable since
by
eliminating
al l th e
suspected
measurements
i t
makes
th e
network
topologically
unobservable.
( i v )
All th e
NQC diverge
if th e
gain
matrix i s
kept
constant
after
th e
first
two
iterations.
T h u s ,
unlike
for the WL S
estimation,
t hi s m at ri x
has been
computed
at
each
c y c l e .
5 . 2 . 3 .
Identification by
H TI
Among
th e 3 1
suspected
measurements
given
by
the
r N
test,
only
2 5
are
chosen
( s =
2 5 ) .
Indeed th e
6
re-
maining
ones
( I N P
2 ,
FLP
6 - 7 ,
INP
5 ,
F LP
4 - 3 , FLQ 4 - 3 ,
FLP
4 - 1 2 )
are
necessary
to ensure th e
observability
of
the
system ( i . e .
t h e y
would
become c ri ti ca l a ft er
elim-
inating
th e
2 5
above-mentioned
m e a s u r e m e n t s ) .
Computa-
T A B L E
V I
F I R S T
S E L E C T I O N R E S U L T S O F H T I
T H R O U G H
S T R A T E G I E S a
A N D
, B .
N U M B E R O F
S E L E C T E D
M E A S U R E M E N T S
2 5
1 s t S e l e c t i o n S t r .
a
S t r a t e g y
8
S e l e c t e d r .
v
x
m e a s u r e m n e n t
e s i
e s i
i
r 1 1 1 i
x i
F L P 2 - 1
2 . 3 0 - 2 3 . 2 7
9 7 . 4 7 1 0 5 6 . 0 0
0 . 0 0 0 . 0 0
I N P
1 - 2 6 1 . 2 0
- 2 1 1 . 6 5 1 7 3 . 5 1
3 3 4 5 . 0 0 0 . 0 0
O . 0 0
F L P
1 - 3 2 . 3 3
2 3 . 5 1
7 3 . 8 6
6 0 6 . 2 0
0 . 0 0 0 . 0 0
F L P
1 - 2
- 1 7 7 . 3 0 - 1 4 8 . 8 9 9 9 . 7 5 1 1 0 6 . 0 0 0 . 0 0 0 . 0 0
F L Q
2 - 1
- 2 . 8 6
1 9 . 3 4 4 4 . 7 5
2 2 2 . 5 0 0 . 3 7
8 . 2 8
F L Q 1 - 2 5 5 . 6 9
4 1 . 8 4 3 9 . 3 9
1 7 2 . 4 0 0 . 7 3 1 4 . 3 8
F L P
4 - 2 1 . 0 9 - 9 . 6 7
4 1 . 9 4 1 9 5 . 4 0
0 . 5 5
1 1 . 5 3
F L P
6 - 2 - 0 . 6 4 - 8 . 7 9 3 4 . 3 7
1 3 1 . 2 0
1 . 1 8 2 0 . 2 8
I N Q 1
5 7 . 0 6 3 9 . 7 4
5 3 . 5 1 3 1 8 . 1 0
0 . 0 0 0 . 0 0
F L P
2 - 6 - 1 . 8 3 7 . 0 3
3 5 . 6 4
1 4 1 . 1 0 1 . 0 6
1 T . 8 9
I N Q
2
- 0 . 7 8 1 7 . 6 3 4 2 . 9 9 2 0 5 . 3 0
0 . 4 8 1 0 . 3 2
F L P
2 - 5 1 . 6 1 5 . 9 2 1 9 . 7 0
4 3 . 1 2 3 . 0 0 2 9 . 5 5
F L Q 1 - 3 - 2 . 6 7
- 6 . 1 5 1 6 . 1 2 2 8 . 8 9 3 . 0 0
2 4 . 1 9
F L Q
4 - 2 0 . 2 3 4 . 9 5
1 5 . 1 5 2 5 . 5 0
3 . 0 0 2 2 . 7 2
F L Q 6 - 2 - 1 . 5 9
2 . 9 4 1 5 . 5 4
2 6 . 8 3 3 . 0 0
2 3 . 3 1
F L P 6 - 8
1 . 2 9 1 . 3 7 1 1 . 7 6 1 5 . 3 7
3 . 0 0 1 7 . 6 4
F L Q
6 - 7
0 . 7 0
- 6 . 7 2 2 1 . 0 6
4 9 . 3 0 3 . 0 0
3 1 . 6 0
I N Q
5 1 . 8 2
- 6 . 3 1 2 2 . 3 6
5 5 . 5 5 3 . 0 0
3 3 . 5 4
F L Q
2 - 6 0 . 3 0 - 2 . 1 4
1 2 . 3 2 1 6 . 8 8
3 . 0 0 1 8 . 4 9
F L P
4 - 6 - 0 . 3 0 - 1 0 . 1 2
2 9 . 0 1 9 3 . 5 2
1 . 8 3 2 6 . 5 5
F L Q 6 - 8
- 0 . 7 9
- 0 . 1 8 1 1 . 7 1 1 5 . 2 4
3 . 0 0 1 7 . 5 7
F L P 6 - 4
- 0 . 4 2
9 . 2 2 2 8 . 5 0
9 0 . 2 3 1 . 8 3
2 6 . 0 7
F L Q
2 - 5
- 0 . 0 1
0 . 3 8 8 . 3 2
7 . 6 8 3 . 0 0
1 2 . 4 8
F L Q
4 - 6
1 . 3 1
1 . 2 5
4 . 5 6 2 . 3 1
3 . 0 0 6 . 8 4
F L P 6 - 9 1 . 2 2
1 . 0 2
4 . 3 3 2 . 0 8 3 . 0 0 6 . 4 9
T A B L E V I I
S t r a t e g y a : 2 n d
S e l e c t i o n
S e l e c t e d m e a s u r e m e n t s
e S i
X
F L P 2 - 1 4 . 4 7
4 . 9 1
I N P
1 - 2 6 1 . 2 3
6 . 6 4
F L P
1 - 2 - 1 7 7 . 2 8 4 . 9 8
F L Q 2 - 1 4 . 9 1
2 0 . 7 2
F L Q 1 - 2
5 4 . 3 2 2 0 . 6 8
IN Q
1
5 7 . 4 2
2 6 . 6 3
I N Q 2 7 . 8 6 2 3 . 3 0
F L Q
1 - 3
- 0 . 9 4
7 . 0 4
F L Q
4 - 2 1 . 3 7 3 . 8 4
F L Q 6 - 7 - 3 . 5 7
5 . 4 6
- F L Q
2 - 6
0 . 3 2
3 . 7 8
T A B L E
V I I I
S t r a t e g y
B:
2 n d
s e l e c t i o n S t r a t e g y
8 : 3 r d
s e l e c t i o n
S e l e c t .
e s r j vi
X i
S e l e c t .
d s
|
r i j
v i
X i
M e a s .
M
i~i~
e a s .
j
1 1
1
F L P 2 - 1
0 . 8 0 4 . 3 4 3 . 0 0
9 . 3 8
I N P 1
- 2 5 9 . 0 4
3 . 0 3
3 . 0 0
7 . 8 3
IN P
1 - 2 5 4 . 7 3
9 . 1 9
3 . 0 0
1 3 . 6 4
F L P 1 - 2
- 1 7 2 . 7 9 2 . 0 4 3 . 0 0
6 . 4 3
F L P 1 - 3 5 . 0 3
2 . 1 7
3 . 0 0
6 . 6 3
IN P
2
- 0 . 8 3 4 . 0 1 3 . 0 0 9 . 0 1
F L P 1 - 2 - 1 7 3 . 5 0
4 . 5 0
3 . 0 0 9 . 5 5 F L Q
1 - 2
6 0 . 5 1 1 . 6 0 3 . 0 0
5 . 6 9
F L Q 2 - 1 1 0 . 1 8 4 7 . 4 5
3 . 0 0 3 1 . 0 0 I N Q 1
6 4 . 5 1
2 . 4 5 3 . 0 0
7 . 0 4
F L Q
1 - 2
4 9 . 3 1 4 6 . 9 9
3 . 0 0 3 0. 8 5 F L P 4 - 3
- 2 2 . 3 9 3 0 . 0 8 3 . 0 0
2 2
I N Q
1
5 3 . 3 5 4 7 . 9 9 3 . 0 0
3 1 . 1 7
I N Q
2 1 4 . 7 2
5 2 . 9 7
3 . 0 0 3 2. 7 5 S t r a t e g y
8 :
4 t h s e l e c t i o n
F L P 6 - 7 3 . 7 6 4 . 6 8
3 . 0 0 9 . 7 4
1
IN P
5
7 . 0 7 9 . 6 3 3 . 0 0
1 3 . 9 6
I N P
1
- 2 5 7 . 2 5
2 . 5 4 3 . 0 0 k
7 . 1 8
F L Q
4 - 3
8 . 5 1 1 2 1 . 0 0
1 . 3 3 2 1 . 9 4 F L P
1 - 2
- 1 7 4 . 5 1
1 . 6 5
3 . 0 0
I 5 . 7 9
F L P
4 - 1 2
2 . 0 0
2 . 2 4 3 . 0 0
6 . 7 4 F L Q 1 - 2 6 0 . 3 4
1 . 6 0
3 . 0 0 5 .
6 9
IN Q 1 6 4 . 9 1
2 . 4 4 3 . 0 0
7 . 0 3
tion
of
J ( ; c )
relative
to th e corresponding
( m - s )
m e a -
surements
gives
J G u c )
=
15211.6-
15178.3
=
3 3 . 3
J ( : i E c )
is
c h i - s q u a r e d
with
( m - n ) - s
=
118-59-25= 3 4 de-
grees
of
freedom.
The
threshold
corresponding
to
a risk
a=
1 %
i s
55.3
Hence
the test
on
J ( 2 c )
i s
n e g a t i v e
on e concludes
( w i t h
o f c our se
a
certain
error probabi-
lity )
that
there are no
m ore BD
among
th e
remaining
redundant measurements
( b u t
not
necessarily
among
the
six
above-mentioned o n e s ) .
T he r es ul ts
corresponding
to strategy
C a are
re-
ported
in
Tables VI
and
VII.
As can
be
seen,
only
three
BD have
been i de nt if ie d b y
th e
first
test.
The
fourth
one ( I N Q
1 )
has
not,
because
of
a too
h i g h
e r r o r
p r o b a -
bility
(ii
=
3 1 8 . 1
,
hence
=
45
)
.
These
three
measurements
are eliminated
and
the state
i s
estimated
ag ain. T he
s e co n d s e le c ti on i s
co mpo sed of ei gh t
new
s u s p e c t e d
measurements
a l o n g
with
th e
three
p r e v i o u s l y
eliminated ones .
The
identification
i s now
c o r r e c t l y
p e r f o r m e d .
Authorized licensed use limited to: to IEEExplore provided by Virginia Tech Libraries. Downloaded on January 16, 2010 at 13:31 from IEEE Xplore. Restrictions apply.
-
8/20/2019 Mili_Bad Data Identification Methods in PS State Estimation_A Comparative Study
8/13
3044
T A B L E I X
C H A R A C T E R I S T I C S
O F T HE E I G H T
N O N I N T E R A C T I N G B D
A c t u a l M e a s u r e d
v a l u e
v a l u e
e i
=
z i - h i ( x )
l e s i l W i i
h i ( x )
Z i
F L P
2 - 5
8 2 . 6 1 8 4 . 6 1 0 2 . 0 6 8 . 0
0 . 8 4
F L Q 2 - 5 2 . 8
1 0 1 . 7
9 8 . 9
6 5 . 9 0 . 8 5
F L P
1 2 - 1 5 1 7 . 6
6 9 . 2
5 1 . 6 6 4 . 5
0 . 1 5
F L Q
1 2 - 1 5
7 . 0
5 6 . 1
4 9 . 1 6 1 . 4
0 . 1 6
F L P 2 4 - 2 5 - 0 . 5 1 9 . 0 1 9 . 5 2 4 . 4
0 . 6 2
F L Q 2 4- 25
2 . 5
2 2 . 4
1 9 . 9
2 4 . 9
0 . 6 4
I N P
2 9
- 2 . 4
- 1 2 . 1
- 9 . 7
1 2 . 1
0 . 4 7
I N Q
2 9
- 0 . 9
- 1 0 . 2 - 9 . 3
1 1 . 6 0 . 4 7
Tables V I
an d VIII
summarize th e
results
of
strat-
egy 6
.
Four
cycles
of
selection
were
n ee de d. T he
si x
suspected
measurements
which w e r e
not
inserted
in
th e
f ir st s e le ct i on
( f o r
observability
r e a s o n s )
are intro-
duced
i n
the
se co nd a nd third
o n es.
Note that
fo r
th e
first
test,
th e value of
' i
i s equal to
zero
for five
measurements
:
this r es ul ts f ro m
th e
poor
accuracy
of
th e
correspondinq
estimates.
However,
fo r most of th e
measurements,
V i
reaches it s m ax im al v al ue
( 3 . 0 ) atthe
second
test.
This shows th e
rapid
increase
in-accuracy
of th e estimates
a nd h en ce
in
power
of
th e
identifica-
tion test.
Finally,
th e f ou rt h s el ec ti on i s
simply
com-
posed of th e four BD.
5 . 3 . SECOND
CASE
:
MULTIPLE
NONINTERACTING
BA D DATA
E i gh t n o ni n te r ac t in g
BD
h av e b ee n s im ul at ed .
Table
IX
lists
their
characteristics along with th e
values
of
th e diagonal
terms
of
W
matrix, w hi ch i nf or m about th e
quality of th e
corresponding
local
redundancy ( p o o r
fo r
1 2 - 1 5 ,
moderate fo r
2 9 ,
moderate
to
high
fo r the
o t h e r s ) .
5 . 3 . 1 . Identification b y e l im in a ti on
5 . 3 . 1 . 1 .
I B E
b a z e d
o n r N
The procedure has required
5
successive
c yc le s c or -
responding
to the
following final list :
-
eliminated
:
INP
5 , FLQ 2 - 5 ;
F LP
2 - 5 , FLQ
1 2 - 1 5 ;
F LP
1 2 - 1 5 ,
FLQ 2 4 - 2 5 ;
FLP 2 4 - 2 5 , IN Q
2 9 ; INP
2 9 ;
-
become
critical :
INP
2 .
All
th e BD have b e en e li mi na te d.
The incorrect elimina-
tion of
INP
5
has made
INP
2
critical. Note
that
the
latter measurement i s not
e r ro ne ou s; h o we v er this cannot
be
verified a posteriori.
5 . 3 . 1 . 2 . I B E
b a e d
o n
r w
The
identification has
required
7
s uc ce ss iv e r e es -
timations.
The f in al list
o f m e as ur e me n ts declaredfalse
i s th e
following.:
-
eliminated
:
F LP & F LQ
2 - 5 ;
FLP&FLQ
2 4 - 2 5 ;
F LP
1 2 - 1 4 ,
FLQ 1 2 - 1 5 ;
FLP
1 2 - 1 6 , INQ 2 9 ;
FLP&FLQ
4 - 1 2 ;
F L P 1 0 - 1 7 ;
MODV
1 3 ;
IN P
2 9 ,
MODV
1 2 ;
-
become
critical
: FLP
1 2 - 1 5 ,
INP
1 6 ,
INP 1 7 .
Seven valid
measurements
have improperlybeen
eliminated.
These undue eliminations
are
essentially caused
by FLP
&
FLQ 12-15,
which
are
located in a region of
lo w lo ca l
redundancy
( W i i =
0.15).
Moreover,
the final
estimate
is
erroneous
since
one
BD has
not been rejected;
indeed,
the l at te r h as
become
critical ( i t
has
been
labelled
false
as
i s
explained in § 2.4).
5 . 3. 2. I d en t if i ca ti o n
by NQC
Conclusions ar e similar
to
those drawn
for
th e pre-
ceding
case, even if
th e
ide ntific a tion c ondit ions
are
l es s s tr in ge nt here.
As in th e
interacting
case, the
QC
has been
unable to provide an
estimation.
Note
that,
because of a lo w
local redundancy,
th e
quality of
th e
state estimation in
th e
vicinity of node
1 5 i s
rather
bad for
al l
the NQC
( s e e Table X ) .
It
i s
worth-mentioning that the NQC
efficiency
i s
found to
vary
with
th e
noise
attached
to th e
valid measurements. This gives NQ C
a capricious
behaviour.
5.3.3. Identification by H TI
Both
s tr at eg ie s h av e i de nt if ie d
in one step
all the
8
B D .
This
identification has required a
s ing le t es t for
strategy
o t ,
and
4
successive
cycles fo r
strategy
a
.
5 . 4 .
T H I R D
CASE
: TO PO LOG IC A L L Y U N IDE N T I F IA BL E
BA D DA TA
A
g ro ss e rr or
has
been
introduced i n
th e
value of
F LP
1 0 - 2 0 .
This measurement
is
redundant
only
with F LP
1 9 - 2 0 .
The elimination method has drawn
up a
list
com-
prising
both
measurements.
The
H TI method has led to th e
same conclusion.
On the
contrary some
NQC
tendto
reject
F LP 19-20
and
to
keep
F LP 10-20.
5 . 5 . SUMMING
U P
S IM U LA T ION R E S U LT S
Table X summarizes
the
salient
simulation results
of
this Section,
along
with
computer
times
given
here
f o r
information only. I ndeed, m an y pa ra me te rs
- and
es-
pecially system's
size
-
influence
significantly
the
speed
of the various
identification
methods.
F or e x a m -
p l e ,
in
th e cases considered
here th e
reduced
s y s t e m ' s
size
is to
th e
advantage
of
th e
IBE
methods since
gener-
ally
t he y r eq ui re
many
state
reestimations.
Note
that
fo r
the
IB E
method based
on
rN ,
th e
Sherman-Morison formula
and
th e
sparse
inverse
matrix
method
proposed
in
[ 4 , 2 2 ]
have
been
used.
Note
also that
th e number
of th e
Z
matrix
' t e r m s
necessary
to be com-
puted fo r t h e
ET I
method
has been
assessed with
respect
to
1 7
and 49
state variables
respectively
for
th e inter-
acting
and
noninteracting
BD cases.
The
latter
should
be
regarded
as an
upper
bound.
The
simulations
h ave b ee n
performed
on
a
DEC 2 0
computer.
T A B L E
X S A L I E N T
S I M U L A T I O N
R ES U L T S O F
T H E
V A R I O U S
I D E N T I F I C A T I O N
M E T H O D S
4
I n t e r a c t i n g B D
8
N o n i n t e r a c t i n g
B D
M E T H O D
PERFORMANCE
I B E N Q C H T I
I B E N Q C
H T I
C R I T E R I A
\
W
r N
Q T
Q L
Q R
a
8
r w
r N
Q T
Q L
Q R
a
8
M e a s u r e m e n t s
A c t u a l B D
2
2
4
4
4
4
4
8
8
8 8
8 8
8
l a b e l l e d
f a l s e V a l i d d a t a
7 7
9 5
1 0
0
9
2
1 5 2
2
0
0
Q u a l i t y t o f
b a d
b a d b a d
r a t h e r
f a i r l y
g u d
g
b
go
a d
r a t h e r r a t h e r
g o o d
g o o d
s t a t e
e s t i m a t i o n
b a
a
a
a
o d g b a d
o o d
a godbd
b a d b a d
god
od
[
[ T ;
N u m b e r
o f
| 4
4
1
|
2
1
7 5
1 1
1
1
1
s t a t e
r e e s t i m a t i o n s
E
N u m b e r o f
___ __ _ __
.__ _____
_
_ _ __
u b e r o f
2
2 2 3 2 4
5 3 3
3
3 8 8
1 0 3 3
c r
i t e r a t i o n s / e s t i m a t i o n
m
T i m e
i n
s e c .
C P U
1 . 8
2 . 5
5 . 0
5 . 5
1 1 1 . 9
1 . 4
3 . 2 3 . 1
1 . 7 1 . 7 2 . 2 1 . 5
1 . 7
N u m b e r
o f
Q
t h e
Z
m a t r i x t e r m s
4 5 5
-
5 6 0 5 6 0
4 5 5
1 3 6 0 1 3 6 0
t o b e
c o m p u t e d
:___.
Authorized licensed use limited to: to IEEExplore provided by Virginia Tech Libraries. Downloaded on January 16, 2010 at 13:31 from IEEE Xplore. Restrictions apply.
-
8/20/2019 Mili_Bad Data Identification Methods in PS State Estimation_A Comparative Study
9/13
3 0 4 5
6 . CONCLUSION
The identification techniques
available t od ay h av e
been
classified i nto t hr ee
broad c la ss es ; t he ir capabi-
lityto face various type s of BD has
b ee n f oun d to differ
significantly
from
one
class
to another.
The NQC
exhibit
th e most
poor performances;
they
are
very
sensitive to
lo w
local
redundancy
and
to
inter-
action of BD;
they
have a slow
convergence
and
a
vi -
c i o u s . b e h a v i o u r .
In
brief, they
don't
show
to
be suit-
able
enough.
On th e other
h a n d ,
th e
IB E
techniques are attrac-
tive
with respect to implementation
considerations:
they are easy to
use a nd s im pl e to
implement.
T he y show
to
be
quite interesting as
long
as
the BD are non-
( o r
w e a k l y )
interacting
and located
in regions
of
moderate
redundancies. They
start
being
unefficient, however,
when th e
number
of BD and their spreading increase and
when
th e local
redundancy
decreases. Although
much more
reliable
than
th e NQC, th e IBE
m et ho ds l ea d to
inaccu-
rate BD
identification results at a c e rt a in l ev el
of
severity of
th e
identifiability conditions.
The
HTI
method, finally,
seems to combine effec-
tiveness,
reliability
and
compatibility with
on-line
implementation requirements.
T h is l at te r a s pe c t r e ce i ve s
at
p r e s e n t
further
consideration.
REFERENCES
[ 1 ] F.C.
Schweppe, J . Wildes,
D.B.
Rom,
Power
System
Static
State
Estimation. Parts
I ,
I I , I I I ,
IEEE
Trans.
on
PAS, v o l . P A S - 8 9 , N o . 1 , J a n . 1 9 7 0 , p p . 1 2 0 - 1 3 5 .
[ 2 1 J.F.
Dopazo,
O.A.
Klitin, A.M. Sasson, S t a t e Esti-
mation
for
Power Systems :
Detection and
Identifica-
tion
of
G r o s s Measurement
E r r o r s ,
Proc. of
th e
8th
PICA
C o n f . , Minneapolis, 1 9 7 3 , pp .
3 1 3 - 3 1 8 .
[ 3 ] E . Handschin, F.C. Schweppe, J .
Kohlas,
A.
Fiechter,
Ba d
Data
Analysis
fo r Power
System
State
Estima-
t i o n ,
IEEE
Trans. on
PAS, v o l . P A S - 9 4 , N o . 2 ,
M a r c h /
April
1 9 7 5 ,
pp.
3 2 9 - 3 3 7 .
[ 4 1 A . Merlin,
F.
Broussole,
F a s t
Method
fo r Ba d
Data
Identification in