Memory Organization. Data Organization Big endian –Most significant byte stored in first memory...
32
Memory Organization
-
date post
21-Dec-2015 -
Category
Documents
-
view
226 -
download
3
Transcript of Memory Organization. Data Organization Big endian –Most significant byte stored in first memory...
Memory Organization
Data Organization
• Big endian– Most significant byte stored in first memory
location each additional n bytes stored in next n locations
• Little endian– Least significant byte stored in first memory
location each additional n bytes stored in next n locations
• Alignment
Memory Organization/Interfacing
• Types– ROM
• Masked ROM
• PROM
• EPROM
• EEPROM
Memory…
– RAM• DRAM
• SRAM
• Organization– Linear– Two-dimensional
Memory Configuration
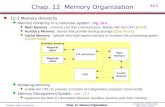
• Single chip– Address bus, data bus, control bus are
connected to the memory chip
• Multiple chips– Address bus and control bus connected to the
chips– Different bits of data bus connected to data pins
Computer Architectures
• von Neumann– Instructions and data stored in same memory
module
• Harvard– Separate memory modules for each
• Modern PCs – von Neumann– Harvard used in cache memory
Memory Hierarchy
• Hierarchical memory system– Registers– Cache– Main memory– Secondary memory
Memory Hierarchy Terminology• Hit - Requested data resides in a given level of
memory• Miss - Requested data not found in the given level
of memory• Hit rate – percentage of memory accesses found in
a given level of memory• Miss rate – percentage of memory accesses not
found in a given level of memory (1- Hit rate)• Hit time – time required to access the requested
data in a given level of memory• Miss penalty – time required to process a miss
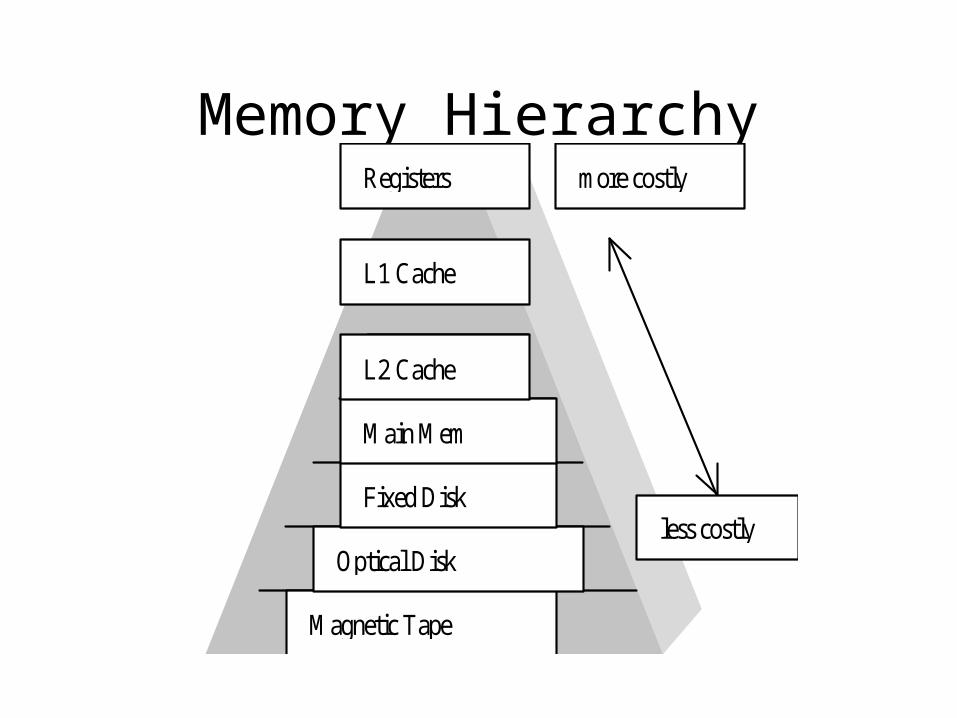
Memory Hierarchy
Magnetic Tape
Optical Disk
Fixed Disk
Main Mem
L2 Cache
L1 Cache
Registers
less costly
more costly
Locality of Reference
• Temporal locality – recently accessed items tend to be accessed again in the near future
• Spatial locality – accesses tend to be clustered in the address space (arrays or loops)
• Sequential locality – instructions tend to be accessed sequentially
Cache
• Small
• High speed
• Temporarily stores data from frequently used memory locations
• Connected to main memory
Cache Mapping Schemes
• The mapping scheme determines where the data is placed when it is originally copied into cache and provides a method for the CPU to find previously copied data when searching cache– Direct mapped cache– Fully associative cache– Set associative cache
Direct Mapped Cache
• Modular approach
• Block X of main memory is mapped to block Y of cache, mod N, where N is the total number of blocks in cache.
• In direct mapping the binary main memory address is partitioned into the fields shown:
Tag Block Word
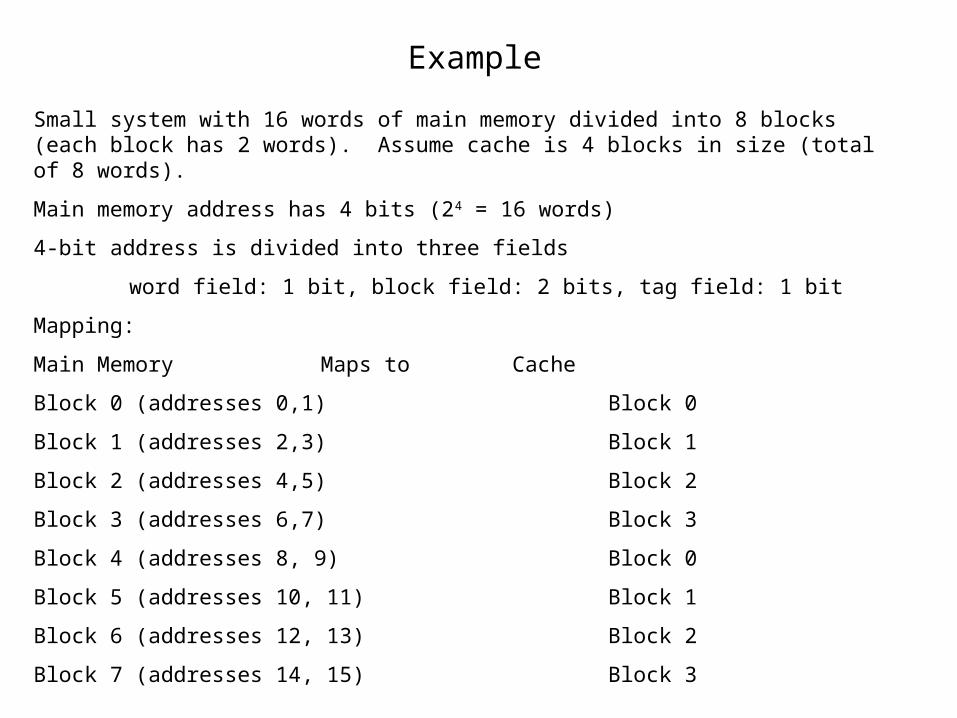
Example
Small system with 16 words of main memory divided into 8 blocks (each block has 2 words). Assume cache is 4 blocks in size (total of 8 words).
Main memory address has 4 bits (24 = 16 words)
4-bit address is divided into three fields
word field: 1 bit, block field: 2 bits, tag field: 1 bit
Mapping:
Main Memory Maps to Cache
Block 0 (addresses 0,1) Block 0
Block 1 (addresses 2,3) Block 1
Block 2 (addresses 4,5) Block 2
Block 3 (addresses 6,7) Block 3
Block 4 (addresses 8, 9) Block 0
Block 5 (addresses 10, 11) Block 1
Block 6 (addresses 12, 13) Block 2
Block 7 (addresses 14, 15) Block 3
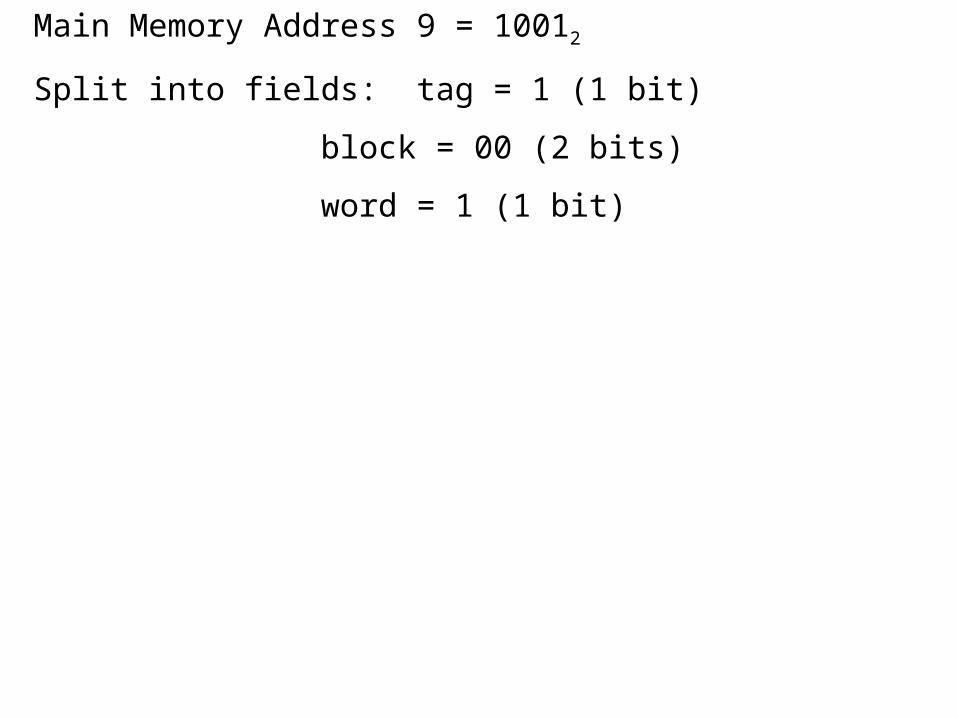
Main Memory Address 9 = 10012
Split into fields: tag = 1 (1 bit)
block = 00 (2 bits)
word = 1 (1 bit)
Fully Associative Cache
• Built from associative memory so it can be searched in parallel.– A single search must compare the requested tag
to all tags in cache to determine if the block is present.
• Special hardware required to allow associative searching (expensive).
Set Associative Cache
• N-way set associative cache mapping– Combination of direct mapped and fully
associative
• The address maps the block to a set of cache blocks
• Address is partitioned into three fields: tag, set, and word.
Main Memory
• Medium speed
• Much larger than cache
• Complemented by a very large secondary memory
Secondary Memory
• Very large
• Slower access
• Hard disk
• Removable media
Virtual Memory
• Virtual Address• Physical Address• Mapping• Page Frames• Pages• Paging• Fragmentation• Page Fault
Paging
• Allocate physical memory to processes in fixed size chunks
• Page table – in main memory (typically)– N rows (N = # of virtual pages in the process)– valid bit
• 0 page is not in main memory
• 1 page is in main memory
How Paging Works
• Extract the page number
• Extract the offset
• Translate page number into physical page frame number using page table
How Paging Works cont’d
• look up page number in page table• check the valid bit
– valid bit = 0• system generates a page fault and OS must intervene• locate the page on disk• find a free page frame• copy the page into the free page frame• update the page table• resume execution of process
How Paging Works cont’d
– valid bit = 1– page is in memory
– replace virtual page number with actual frame number
– access data at offset in physical page frame
Example
• process has a virtual address space of 28 words
• physical memory of 4 page frames – 32 word in length
• Virtual address is 8 bits
• Physical address is 7 bits
Example cont’d
• 2 fields of virtual address– Page – 3 bits– offset – 5 bits
• system generates virtual address 13 (00001101 in binary)– Page 000– Offset 01101
• Physical address = 1001101
Access Time
• Time penalty associated with virtual memory– two physical memory accesses for each
memory access the processor generates
Disadvantages
• extra resource consumption – memory overhead for storing page tables
• special hardware and OS support required

Advantages
• Programs are no longer restricted by the amount of physical memory available
• Easier to write programs– don’t need to worry about physical address
space limitations
• Allows multitasking
Segmentation
• virtual address space divided into logical variable length units (segments)
• To copy a segment into memory OS looks for a chunk of free memory large enough
• Segment– base address – where located in memory– bounds limit – indicates its size
• Segment table – base/bounds pairs
Segmentation
• External fragmentation– as segments are copied into and out of memory
free chunks of memory are broken up– eventually many small chunks none big enough
for any segment
• Garbage collection combats external fragmentation

Paging and Segmentation
• Systems can use a combination• Virtual address space is divided into segments of
variable length• Segments are divided into fixed-size pages• Main memory is divided into the same size frames• Each segment has a page table• Physical address divided into 3 fields: segment,
page number, offset