
Mechanical Steerable Lens for Wireless Communications · uma lente dieléctrica oscila sobre uma...
107
Mechanical Steerable Lens for Wireless Communications Eduardo Jorge da Costa Brás Lima Master’s Degree Dissertation in Electrical and Computer Engineering Jury President Prof. António Luís Campos da Silva Topa, IST Supervisor Prof. Carlos António Cardoso Fernandes, IST Co-supervisor Prof. Jorge Rodrigues da Costa, ISCTE Member Prof. António Alves Moreira, IST November of 2008
Transcript of Mechanical Steerable Lens for Wireless Communications · uma lente dieléctrica oscila sobre uma...

Mechanical Steerable Lens for Wireless Communications
Eduardo Jorge da Costa Brás Lima
Master’s Degree Dissertation in
Electrical and Computer Engineering
Jury
President Prof. António Luís Campos da Silva Topa, IST
Supervisor Prof. Carlos António Cardoso Fernandes, IST
Co-supervisor Prof. Jorge Rodrigues da Costa, ISCTE
Member Prof. António Alves Moreira, IST
November of 2008


Acknowledgment
Above all I want to thank my close family, for the caring and strong support I always felt on all my
decisions along the research process that led to this Master thesis.
My trajectory on the antennas research field and especially dielectric lens antennas was initially
induced by Prof. Carlos Fernandes, from Instituto Superior Técnico. He and Prof. Jorge Costa, as my
research project coordinators significantly influenced my work, by presenting new ideas and
alternative research paths. This serves to show my appreciation for all the time spend and concern
they always showed in relation to the work development.
Considering all prototypes manufacturing and measurements, I would also like to thank to Vasco Fred
for his commitment on the antennas and related structures’ fabrication, as well as to thank to António
Almeida for all the time spend with antenna performance measurements.
I also want to state that all the research work was performed at Instituto de Telecomunicações, where
all conditions were met in order to fully accomplish this project, namely the antennas’ prototypes
fabrication and measuring facilities as well as all specialized collaborators help, which I already
mentioned before.


Abstract
This thesis presents a new concept of a steerable beam antenna, where a dielectric lens antenna is
tilted and/or rotated in relation to a stationary feed. The dielectric lens is properly shaped and
positioned accordingly to two requirements: high gain and beam tilt capability. In this way, the beam is
mechanically steered in elevation and azimuth. The arrangement is very simple, it requires no rotary
joints and it represents a compact and low-cost solution.
The fabricated prototype adopts a circular horn antenna with moderate gain as the feed (13 dBi). The
shaped dielectric lens allows performing beam steering while it also increases the entire structure gain
to 21dBi. The mechanical steerable beam antenna presents a broadband behaviour, including the
entire international unlicensed spectrum from f = 57 GHz to f = 66 GHz. The antenna is able to tilt the
beam from -45º to 45º for all azimuths with gain scan loss below 1.1 dB and radiation efficiency above
95%. The entire antenna structure volume is around 3×3×3 cm3, the lens weighting 8 g.
As a complementary task to enable the experimental evaluation of the lens performance, an existing
software application that controls the millimetre wave antenna measurement set-up in the anechoic
chamber of Instituto de Telecomunicações was updated. The application functionalities were improved
and two extra antenna positioners were added to the system. The available and fully functional
antenna positioners allow a complete automation of the antenna azimuth rotation and roll axis as well
as probe polarization control.
Keywords: mechanical steerable beam antenna, shaped dielectric lens, antenna prototype,
broadband antenna, anechoic chamber remote control, mm-wave measurements.

Resumo
É apresentado um novo conceito de antena com orientação mecânica do feixe de radiação, em que
uma lente dieléctrica oscila sobre uma fonte primária fixa. A lente é projectada de forma a cumprir
com dois requisitos essenciais: ganho elevado e capacidade para orientar o feixe de radiação, quer
em elevação, quer em azimute. A estrutura é bastante simples, não necessita de juntas rotativas e
representa uma solução compacta e de baixo custo.
O protótipo da antena é composto por uma corneta cónica fixa com ganho moderado (13 dBi). A lente
dieléctrica permite orientar o feixe de radiação e aumentar o ganho de toda a estrutura para 21 dBi. A
antena apresenta uma grande largura de banda, englobando parte do espectro de frequências não
sujeito a licenciamento, que vai de f = 57GHz a f = 66 GHz. Consegue-se uma inclinação do feixe de
-45º a 45º em elevação, com perdas de varrimento inferiores a 1.1 dB e com eficiência de radiação
superior a 95%. A estrutura formada pela corneta mais a lente possui um volume de 3x3x3x cm3, com
a lente a pesar 8 g.
Como tarefa complementar para possibilitar a avaliação experimental da antena, foi actualizada a
aplicação que controla os equipamentos de medida instalados na câmara anecóica localizada no
Instituto de Telecomunicações. Para além de acrescentar novas funcionalidades na aplicação, foram
ainda adicionados dois posicionadores de polarização, permitindo assim controlar remotamente a
rotação da antena sobre os seus dois eixos e a polarização da antena em recepção.
Palavras-chave: antena de seguimento mecânico, lente dieléctrica, protótipo da antena, antena
de banda larga, controlo remoto das medidas na câmara anecóica, medidas em ondas milimétricas.

Table of Contents
List of Figures ......................................................................................................................................... i
List of Tables ....................................................................................................................................... vii
List of Acronyms .................................................................................................................................. ix
1. Introduction .................................................................................................................................... 1
1.1. State of the art ........................................................................................................................... 1
1.2. Applications ............................................................................................................................... 4
1.3. Mechanical steerable lens ........................................................................................................ 7
1.4. Thesis structure ....................................................................................................................... 10
2. Lens tilted accordingly with its focal arc ................................................................................... 11
2.1. Abbe lens (Bifocal design) ...................................................................................................... 14
2.1.1. Lens formulation .............................................................................................................. 14
2.1.2. Lens design ...................................................................................................................... 16
2.2. Modified Abbe lens.................................................................................................................. 23
2.2.1. PO lens analysis with Gaussian feed .............................................................................. 26
2.2.2. Circular horn feed ............................................................................................................ 29
3. Lens tilted in relation to its focal point ...................................................................................... 37
3.1. Steerable elliptical dome lens ................................................................................................. 39
3.2. Solution with two refraction surfaces ...................................................................................... 50
3.2.1. L2 lens analysis with CST software ................................................................................. 52
3.2.2. L2 lens analysis with ILASH software .............................................................................. 56
4. Mm-wave antennas measurements ............................................................................................ 67
4.1. Measurement facility description ............................................................................................. 67
4.2. Antennas’ prototypes and measurements .............................................................................. 70
4.2.1. Steerable elliptical dome lens .......................................................................................... 72
4.2.2. Solution with two refraction surfaces ............................................................................... 75
5. Conclusions .................................................................................................................................. 79
6. References .................................................................................................................................... 81
A. Annexes ....................................................................................................................................A-1
A.1. Prototype structure ................................................................................................................. A-1
A.2. Manufactured Prototypes' Photos .......................................................................................... A-2


i
List of Figures
Figure 1.1 – Dual Lens Antenna with Mechanical and Electrical Beam Scanning, [7] ........................... 2
Figure 1.2 - Low-Profile Lens Method and Apparatus for Mechanical Steering of Aperture Antennas, [11] ........................................................................................................................................................... 3
Figure 1.3 – Wireless HD example (based on [14]). ............................................................................... 4
Figure 1.4 – HAP communication system example (based on [15]). ...................................................... 5
Figure 1.5 – Coverage areas in HAP systems ........................................................................................ 5
Figure 1.6 – Collimating lens ................................................................................................................... 8
Figure 1.7 – Scanning lens antenna ........................................................................................................ 9
Figure 2.1 – Example of the directivity obtained for a scanning lens with the feed being displaced along the x and z axis. The dashed line represents the geometrical optics focal arc. .......................... 11
Figure 2.2 – Mechanical beam steerable lens using scanning lens approach ...................................... 12
Figure 2.3 – Lens tilt configuration: a) Real model; b) ILASH model. ................................................... 13
Figure 2.4 – Bifocal design .................................................................................................................... 14
Figure 2.5 – Abbe sine lens ................................................................................................................... 15
Figure 2.6 – Abbe lens made of polyethylene: a) lens profile; b) lens surface. .................................... 17
Figure 2.7 – Abbe lens’ ray tracing: a) on-axis position (0, 0) mm; b) maximum feed offset position (-12.7, 7.5) mm. ..................................................................................................................................... 18
Figure 2.8 – Feed tilt angle. ................................................................................................................... 18
Figure 2.9 – Abbe lens’ radiation pattern (ϕ = 90º) at f = 62.5 GHZ: a) on-axis position (0, 0) mm; b) maximum feed offset position (-12.7, 7.5) mm. ................................................................................. 19
Figure 2.10 – 3D radiation pattern for feed tilt of θfeed = 40º. ................................................................. 20
Figure 2.11 – Radiation pattern (ϕ = 90º) accordingly with the feed axis, for a lens tilt of θlens = -61º, achieving a beam tilt of θbeam = -40º. ................................................................................... 20
Figure 2.12 – Abbe lens with a spherical base with centre at (-12.7, 0) mm, source is located at off-axis position: a) ray tracing b) surface currents. .............................................................................. 21
Figure 2.13 – Radiation pattern (ϕ = 90º) obtained for the off-axis feed position with the Abbe lens with a close to spherical base with centre at (-12.7, 0) mm. ......................................................................... 22
Figure 2.14 – Modified Abbe lens intersection curve compared to the Abbe lens curve. ..................... 23
Figure 2.15 – Modified Abbe lens made of polyethylene: a) lens profile; b) lens surface. .................... 24
Figure 2.16 – Modified Abbe lens’ ray tracing: a) on-axis position (0, 0) mm; b) maximum feed offset position (-7, 5.1) mm. ............................................................................................................................. 24

ii
Figure 2.17 – Beam tilts evolution with lens’ tilts for the Modified Abbe lens. ....................................... 25
Figure 2.18 – Modified Abbe lens’ radiation pattern (ϕ = 90º) with Gaussian feed at f = 62.5 GHZ, positioned at: a) on-axis position; b) (-1.9, 0.25) mm; c) (-3.675, 0.985) mm; d) (-5.46, 2.43) mm; e) (-6.49, 3.9) mm; f) (-7, 5.1) mm. ........................................................................................................ 27
Figure 2.19 – 3D radiation pattern of the Modified Abbe lens fed by the Gaussian feed with θfeed = 62º tilt. ......................................................................................................................................... 28
Figure 2.20 - Circular horn and waveguide. .......................................................................................... 29
Figure 2.21 – Horn far-field radiation pattern for f = 62.5 GHz. ............................................................. 29
Figure 2.22 - Horn far field radiation pattern for the 57 GHz to 66 GHz frequency spectrum: a) ϕ = 0º; b) ϕ = 90º. .............................................................................................................................. 30
Figure 2.23 – Simulated amplitude of the input reflection coefficient of the horn antenna. .................. 30
Figure 2.24 – CST model of the modified Abbe lens with circular horn and waveguide. ...................... 31
Figure 2.25 – Far field of the Modified Abbe lens with circular horn and waveguide. ........................... 31
Figure 2.26 – Evolution of the beam tilt with the lens tilt; CST antenna model and far field radiation pattern from not tilted to θlens = -62º of lens tilt with a step of closely 15º. ............................................. 32
Figure 2.27 – Antenna S11 parameter on the interval 50 GHz to 70 GHz for non tilted lens. ............... 33
Figure 2.28 – Antenna S11 parameter on the interval f = 50 GHz to 70 GHz for lens tilt angles from θlens = 15º to 72º. .................................................................................................................................... 33
Figure 2.29 – Modified Abbe lens’ radiation pattern with circular horn feed at f = 62.5 GHZ for several tilted angles of the lens along the ϕ = 90º plane, lens tilted (θlens) of: a) 0º; b) -15º; c) -30º; d) -48º; e) -62º; f) -72º. ....................................................................................... 34
Figure 3.1 – Mechanical beam steerable lens with lens tilted in relation to its phase centre. .............. 37
Figure 3.2 – Lens tilt configuration: a) Real model; b) ILASH model. ................................................... 38
Figure 3.3 – Ray tracing for steerable elliptical dome lens with non-tilted and tilted lens (extracted from [26]). ............................................................................................................................. 39
Figure 3.4 – L1 lens of polyethylene (ILASH model): a) lens profile; b) lens surface. .......................... 40
Figure 3.5 - Ray tracing for a lens tilt of θt=20º with a full beam-width of the feed of 70º. .................... 41
Figure 3.6 – L1 lens of polyethylene (CST model). ............................................................................... 42
Figure 3.7 - Input reflection coefficient amplitude with L1 lens for tilting lens angles from θlens = 0º to 40º: a) ϕ = 0º; b) ϕ = 90º. .................................................................................................... 42
Figure 3.8 – 3D radiation pattern for the non-tilted elliptical lens configuration. ................................... 43
Figure 3.9 – Far field radiation pattern with L1 lens for tilting lens angles from θlens = 0º to 40º: a) ϕ = 0º; b) ϕ = 90º. .................................................................................................... 44
Figure 3.10 – Far field radiation pattern with L1 lens covering the Wireless HD spectrum (f = 57 GHz to f = 66 GHz): a) ϕ = 0º; b) ϕ = 90º. .................................................................................. 45

iii
Figure 3.11 – Far field radiation pattern with L1 lens for the Wireless HD spectrum (f = 57 GHz to f = 66 GHz) for θlens = 40º along the ϕ = 0º plane. ......................................................... 45
Figure 3.12 – Incident angle at the outer lens surface in function of the departure angle from the feed in relation to the lens axis. ..................................................................................................................... 46
Figure 3.13 – Near field for a lens tilt of θlens = 20º. ............................................................................... 46
Figure 3.14 – Radiation pattern for the non tilted L1 lens: a) ϕ = 0º; b) ϕ = 90º. .................................. 47
Figure 3.15 – L1 lens radiation pattern for θlens = 10º along ϕ = 90º: a) Amplitude; b) Phase. .............. 47
Figure 3.16 – L1 lens radiation pattern for θlens = 20º along ϕ = 90º: a) Amplitude; b) Phase. .............. 48
Figure 3.17 – L1 lens radiation pattern for θlens = 30º along ϕ = 90º: a) Amplitude; b) Phase. ............. 48
Figure 3.18 – L1 lens radiation pattern for θlens = 40º along ϕ = 90º: a) Amplitude; b) Phase. ............. 49
Figure 3.19 - Geometry for the design of two-refraction surface collimated beam lens (extracted from [26]). ............................................................................................................................. 50
Figure 3.20 – L2 lens, ILASH model I: a) lens profile; b) lens surface. ................................................. 51
Figure 3.21 – Ray tracing ...................................................................................................................... 52
Figure 3.22 – L2 CST model ................................................................................................................. 52
Figure 3.23 – a) Incident angle at the outer lens surface in function of the departure angle from the feed in relation to the lens’ axis; b) near field for a lens tilt of θbeam = 20º. ............................................ 53
Figure 3.24 - Input reflection coefficient amplitude with L2 lens for tilting lens angles from θlens = 0º to 50º along: a) ϕ = 0º; b) ϕ = 90º. .......................................................................................... 54
Figure 3.25 – Far field radiation pattern with L2 lens for tilting lens angles from θlens = 0º to 50º along: a) ϕ = 0º; b) ϕ = 90º. .......................................................................................... 55
Figure 3.26 – Spherical double shell lens: a) lens surface; b) radiation pattern compared to feed radiation pattern (single mode feed) ...................................................................................................... 56
Figure 3.27 – L2 lens, ILASH model with spherical base: a) lens profile; b) lens surface, inner shell (blue) – air, outer shell (green) – polystyrene........................................................................................ 57
Figure 3.28 – Surface currents - front view: a) no reflections; b) 1st order reflections. ......................... 58
Figure 3.29 – Surface currents - base view: a) no reflections; b) 1st order reflections; c) 2nd order reflections ..................... 59
Figure 3.30 - Radiation pattern for the non-tilted feed (lens) configuration with 1st order reflections: a) ϕ = 0º; b) ϕ = 90º. .............................................................................................................................. 60
Figure 3.31 - Radiation pattern for the non-tilted feed (lens) configuration with 2nd order reflections: a) ϕ = 0º; b) ϕ = 90º. .............................................................................................................................. 61
Figure 3.32 - Radiation pattern phase for the non-tilted feed (lens) configuration with 1st order reflections: a) ϕ = 0º; b) ϕ = 90º............................................................................................................. 62

iv
Figure 3.33 - Radiation pattern phase for the non-tilted feed (lens) configuration with 2nd order reflections: a) ϕ = 0º; b) ϕ = 90º............................................................................................................. 63
Figure 3.34 – Surface currents – tilted feed on the ϕ = 90º plane: a) θfeed = 10º; b) θfeed = 40º. .......... 63
Figure 3.35 – Radiation pattern for the θlens = -10º lens configuration along the ϕ = 90º plane: a) Amplitude; b) Phase. ......................................................................................................................... 64
Figure 3.36 – Radiation pattern for the θlens = -20º lens configuration along the ϕ = 90º plane: a) Amplitude; b) Phase. ......................................................................................................................... 64
Figure 3.37 – Radiation pattern for the θlens = -30º lens configuration along the ϕ = 90º plane: a) Amplitude; b) Phase. ......................................................................................................................... 65
Figure 3.38 – Radiation pattern for the θlens = -40º lens configuration along the ϕ = 90º plane: a) Amplitude; b) Phase. ......................................................................................................................... 65
Figure 3.39 – Radiation pattern for the θlens = -50º lens configuration along the ϕ = 90º plane: a) Amplitude; b) Phase. ......................................................................................................................... 65
Figure 3.40 - Gain variation of the L2 lens versus tilt angle computed for three frequencies within the Wireless HD band. ................................................................................................................................. 66
Figure 4.1 – Mm-wave anechoic chamber. ........................................................................................... 67
Figure 4.2 – Devices: a) Initialization; b) Selection. .............................................................................. 68
Figure 4.3 – Field measuring window. ................................................................................................... 69
Figure 4.4 – Geometry of the horn plus lens antenna: a) non-tilted lens; b) tilted lens (based on [15]). ..................................................................................................................................... 70
Figure 4.5 – Structure of the mechanical scanning lens (taken from [15]). ........................................... 71
Figure 4.6 – Manufactured circular horn feed. ...................................................................................... 71
Figure 4.7 - Measured and simulated co- and cross-polar radiation pattern of the standalone conical horn at 62.5 GHz. .................................................................................................................................. 72
Figure 4.8 - Measured amplitude input reflection coefficient of the horn antenna superimposed on CST simulations. ............................................................................................................................................ 72
Figure 4.9 - Manufactured L1 lens and feeding horn, assembled in a lab test set-up. ......................... 73
Figure 4.10 – Measured amplitude input reflection coefficient of the horn antenna when placed in the centre of the spherical air cavity of the L1 lens. .................................................................................... 73
Figure 4.11 - Measured and simulated radiation patterns of the L1 lens antenna at f =62.5 GHz for θlens = 0º to θlens = -40º along ϕ = 90º. ................................................................................................... 74
Figure 4.12 - Manufactured L2 lens plus horn feed. ............................................................................. 75
Figure 4.13 – Measured amplitude input reflection coefficient of the horn antenna when placed in the centre of the spherical air cavity of the L1 lens. .................................................................................... 75

v
Figure 4.14 - Measured and simulated radiation patterns of the L2 lens antenna at f =62.5 GHz for θlens = 0º to θlens = 50º. ........................................................................................................................... 76
Figure A.1 – Prototype structure. ......................................................................................................... A-1
Figure A.2 – Solution with two refraction surfaces (L2 lens) ................................................................ A-2
Figure A.3 – Steerable elliptical dome lens (L1 lens) ........................................................................... A-3
Figure A.4 – Horn antenna photos: a) front view; b) top view. ............................................................. A-4
Figure A.5 – Mechanical Beam Steering structure, without the feed attached: a) side view; b) front view. .................................................................................................................... A-4

vi

vii
List of Tables
Table 1.1 – Required ground station gain for HAP communication systems .......................................... 6
Table 1.2 – Millimetre-Wave Communication Systems Specifications ................................................... 7
Table 2.1 – Directivity and beam tilt for both on-axis and off-axis feed positions ................................. 21
Table 2.2 – Feed positions and lens tilted angles for sequentially beam tilt values using ray tracing method ................................................................................................................................................... 25
Table 2.3 – Directivity of the radiation pattern obtained for the several lens tilts with Gaussian feed .. 27
Table 2.4 – Directivity of the radiation pattern obtained for several lens tilts with the circular horn as the feed .................................................................................................................................................. 35
Table 3.1 – Performance parameters of L1 lens for ILASH and CST software tools. .......................... 49
Table 3.2 – Performance parameters of L2 lens for ILASH and CST software tools. .......................... 66
Table 4.1 - Measured performance of the L1 lens at f = 62.5 GHz. ∆G is the gain scan loss, XPol is the higher cross polarization level in the main beam full width at -10 dB and η is the CST simulated radiation efficiency. ................................................................................................................................ 74
Table 4.2 - Measured performance indicator values of the L2 lens at f = 62.5 GHz. ∆G is the scan loss value, XPol is the higher cross polarization level in the main beam full width at -10 dB and η is the CST simulated radiation efficiency. ....................................................................................................... 77

viii

ix
List of Acronyms
CST Computer Simulation Technology
GA Genetic Algorithms
GO Geometrical Optics
HAPs High Altitude Platform stations
ILASH Integrated Lens Antenna Shaping
IST Instituto Superior Técnico
IT Instituto de Telecomunicações
L1 Prototype lens 1
L2 Prototype lens 2
PO Physical Optics
RAC Rural Area Coverage
SAC Suburban Area Coverage
UAC Urban Area Coverage
Wireless HD High definition wireless communication system

x

1
1. Introduction
Nowadays the demand for millimetre wave steerable beam antennas is gaining a new interest due to
the desire of higher transmission bit rates between fixed and mobile terminals. The growing interest in
using the unlicensed spectrum around 60 GHz for high data rate applications, such as high speed
internet access, has motivated the development of highly integrated compact antennas [1]. At these
frequencies the free space attenuation is significantly high even when just considering a few hundred
meters communication link. In order to ensure acceptable system performance and range, such
antennas must achieve high gain while being capable of directing the electromagnetic energy to the
intended target/user.
The main objective of this study is to provide a small, inexpensive and efficient beam steerable
antenna for millimetre wave communication systems.
1.1. State of the art
Since the development of the first directional antenna, many different methods were employed to point
the main antenna radiation beam in a specific direction. In the beginning, antennas were simply
moved mechanically, rotating an antenna with a fixed radiation pattern in any direction, making use of
rotary joints. A typical example of such antennas is a radar antenna. Following this first step, an array
of antenna elements were used, shifting the phase of each element in order to steer the beam
electronically. In the past few years several solutions were presented for steerable antennas, including
electronically and mechanical scanning antennas or both.
More recently, new approaches for electronic beam-steering were developed, still considering array
antennas, [2]-[5]. In [2] a planar array antenna is presented for f = 60 GHz, using varactor diodes to
replace the ordinary phase shifters, making it possible to be fabricated at low cost. It is stated that the
antenna gain is more than 16 dBi and a bandwidth of about 4 GHz is achieved, however, the beam
steering angle is just ±7º which is insufficient. Another attempt to produce an affordable planar beam
steerable antenna array is found in [3]. In this case the focus is placed on a novel feed network and
array architecture for implementing a planar phased array of microstrip antennas. Although the
antenna represents a more compact solution with lower manufacturing costs, the achieved maximum
beam steering angle and antenna efficiency are quite low, ±10º and 33-36%, respectively. Besides,
the antenna is designed for the X-band (7 GHz to 12.5 GHz), far from the desired working frequency,
f = 60 GHz. A similar approach as in [2], considering varactor diodes, is shown in [4], although the
phased array is now based on the extended-resonance power-dividing method, eliminating the need
for separate power splitter and phase shifters. This approach results in a substantial reduction in
circuit complexity and cost. However, the concept is shown just for f = 2 GHz with a limited 10º beam
steering. A more recent study is presented in [5], showing the first beam steering antenna based on
MEMS technology. The low-loss performance when compared to the typical MMIC technology still
presents very low efficiency, around 25%. Most of the presented solutions have a narrow scanning

2
angle and/or very low efficiencies. The antennas shown in [2]-[5] have a scanning angle of ±7º, ±10º,
±10º and ±12º, just allowing a fine adjustment of the beam direction. On top of all this, the associated
costs with the millimetre wave circuits are quite critical, especially when using MMIC technology. The
phased-array system requires a complex integration of many circuits, being an expensive and lossy
solution, commonly used in radars due to its scanning speed. Since this system is expensive, the use
of phased arrays is limited to a few sophisticated military and space systems.
Three different methods are presented in [6], summarizing some new developed techniques for beam
steering that avoid the use of conventional phase shifters. The first method is a microstrip patch
antenna array fed by a dielectric image line controlled by a reflector plate. At Ka-band (26.5 GHz to
40 GHz) a scan angle of 20º is achieved. Using the second method, a multimicrostrip line fed Vivaldi
antenna array controlled by piezoelectric transducers, a very broadband beam steering has been
achieved from f = 7.6 GHz to f = 26.5 GHz with a scan angle from -34º to +26º. The third method
corresponds to a moveable grating film fed by dielectric image line. The movement alters the grating
spacing and thus changes the radiation angle. It represents a low cost solution with impressive results,
with up to 53º scanning (from -5º to +48º) at f = 35GHz.
The mechanical steerable beam antenna is a slower tracking device when compared to electronically
one; however, it represents a low-cost and efficient solution when considering a fixed or slowly moving
terminal. The use of rotary joints is very common, of which the radar antenna is a good example.
Recently, new solutions without the need of expensive and fault prone rotary joints have been
approached and many patents were developed all over the years related with mechanical steering
antennas [7]-[11].
The example shown in Figure 1.1 corresponds to a combination of electronical and mechanical
beam-steering. The mechanical tilt of the lens works in cooperation with the implemented phase
shifters in order to increase the maximum beam steering angle [7]. For a 50º scan, the resulting scan
loss is –0.85 dB, which demonstrates a very stable radiation pattern for a ±50º beam steering. The
mechanical motion minimizes the required electronic scan angles, thus minimizing the number of
phase shifters. This solution presents some benefits, as wider scanning angle, but the electronic
handicap, the circuits’ complexity and cost, remains a difficulty to overcome.
Figure 1.1 – Dual Lens Antenna with Mechanical and Electrical Beam Scanning, [7]
Active lens
Collimating lens

3
A scanning array antenna, producing a directional beam by differentially rotating two, co-axial, flat
phasing plate assemblies is presented in [8]. A different mechanical beam steering is shown in [9],
with a rotatable combination of a dielectric lens and a reflective surface being used to replace the
common electronic phase shifters. Another example in [10] considers an angled reflector deflecting
the incident energy from the feed into a dielectric lens, which focuses it into a collimated beam. In
Figure 1.2 a mechanical steerable antenna method is shown, corresponding to the US patent [11]. In
this case, above the primary feed, represented by a circular horn, lays (but not in contact with) one or
more dielectric plates that include a number of discrete portions for differentially delaying adjacent
discrete portions of a beam in order to change its direction. Although it may seem a good solution, the
antenna is very frequency dependent (narrowband antenna) and polarization is greatly affected by the
relative position of the plates.
Figure 1.2 - Low-Profile Lens Method and Apparatus for Mechanical Steering of Aperture
Antennas, [11]
All the presented mechanical beam steering solutions require no rotary joints, which for such high
frequencies would be extremely complex. For these frequencies the wavelength is so small that it
becomes impractical or overly expensive to fabricate all the components of a typical waveguide rotary
joint. Despite all the work and concepts being developed at the moment, there is no compact and low
cost solution with a good beam steering performance that is able to fulfil with all the requirements for a
low cost mass production product.
Dielectric lens surface
Dielectric lens

4
1.2. Applications
There are different fields where beam steerable antennas are of major importance; amongst them two
are addressed here: high definition wireless communication system (Wireless HD) and high altitude
platform stations (HAPs), with HAPs frequency spectrum slightly below 60 GHz.
A new wireless communication system is being developed, Wireless HD, as an initiative of several
leading technology and consumer companies in order to create an industry standard that will define
the next generation of wireless systems related with consumer electronics [12]. The system is
intended to use the unlicensed spectrum from f = 57 GHz to f = 66 GHz, which allows a very high
communication bit rate. In these frequencies, atmospheric attenuation is very high, due to oxygen
absorption (it causes a 15 to 30 dB/Km loss [13], which translates to over 1.5 dB loss at 100 m), being
more suited for home entertainment, with radio links distances smaller than 10 m, as presented in
Figure 1.3. This makes Wireless HD technology especially tailored for streaming high definition
content between source devices and high-definition displays. Wireless HD sets itself apart from other
wireless standards because it can transmit high definition signals without the need for compression.
The target of the Wireless HD high-speed radio communication standard for data rates of up to
4 Gbps is defined as handling full HD (1080p) video without high-efficiency coding [12].
Figure 1.3 – Wireless HD example (based on [14]).
The free space attenuation in the available frequencies band is of extreme relevance when
considering a communication link with 10 m length. In order to overcome this difficulty, high gain
antennas are required to improve the connection link and ensure acceptable system performance and
range as well as prevent multipath interference. As a result of a narrower beam, steerable beam
capability is mandatory to automatically point the main beam into the transmitting device direction.
One major difficulty is to avoid temporary blockage of the signal, meaning that no line of sight is
possible. Eventually, the link could be established considering the signal reflections, however, for
simplicity, just the line of sight case was considered.

5
HAPs represent a good alternative to terrestrial and satellite communications systems, providing
network flexibility and reconfigurability. It is a suited communications system structure for many
applications such as 3G networks [15], broadband services [16] and monitoring and navigation
applications [17], amongst many others. Figure 1.4 illustrates two HAPs applications: providing a
broadband service along a train trajectory, or communicating with a helicopter for traffic monitoring. It
is a promising technology which can serve a large number of users at low cost with modern wireless
communication services. The HAPs communication system consists on a high altitude platform
located on a quasi-stationary position in the lower stratosphere; between 21 Km and 25 Km. HAPs are
being designed in the form of aeroplanes, airships and aircrafts. Depending on the adopted solution,
concerning the power source and platform design, the HAP can stay aloft from just a few months to
several years.
Figure 1.4 – HAP communication system example (based on [14]).
According to the ITU-R recommendation documents [15] and [18], the available bands are
47.2 – 47.5 GHz and 47.9 – 48.2 GHz (around 300 MHz for each link), where the coverage area of a
stratospheric relay station is composed of three concentric areas, Figure 1.5:
• the urban area coverage (UAC);
• the suburban area coverage (SAC);
• the rural area coverage (RAC).
Figure 1.5 – Coverage areas in HAP systems
UAC SAC RAC
60º-75º 60º
75º-85º
36 Km 76.5 203
21 Km

6
Several studies about the best HAPs system structure [17], [19] show that HAPs requirements are still
difficult to satisfy, namely: materials, platform stability, the factors affecting the communication link
such as propagation losses [20] and particularly in this case, antenna design.
A multi-beam antenna will be adopted on the HAP station, similar to the one presented in [21] and, as
referenced in [22], a total of 700 beams in each of the coverage areas will be projected. For the
ground station or user terminal, the antenna must fulfil different requirements accordingly to the
intended coverage area, Table 1.1. Besides the presented gain and since the terminal can be moved
inside a specific coverage area, the antenna must be able to direct the beam into the HAP station,
forcing the use of a steerable beam antenna.
Table 1.1 – Required ground station gain for HAP communication systems
Coverage area Antenna gain [dBi]
UAC 23
SAC 38
RAC 38
Both Wireless HD and HAPs services, demand for steerable beam antennas with high gain. A new
antenna design method must be developed, considering all specifications regarding similar wireless
communication systems and thus leading to a compact and low cost antenna, since it is targeted for
mass applications.

7
1.3. Mechanical steerable lens
The objective of this research study is to provide a beam-steerable antenna for millimetre wave
communication systems, more specifically for Wireless HD and HAPs communication systems, being
the concept applicable for different services. The two possible applications presented in 1.2 indicate
the need of a very directive antenna (leading to high gain antenna when considering low losses), while
having a large scanning width, Table 1.2. The antenna scanning performance is evaluated considering
its gain beam steering loss. The gain loss is defined as the difference between the beam’s gain and
the gain of the more intense beam. The designed antenna for both services must present a beam tilt
higher than ±40º with gain loss lower than 2 dB, full azimuth scan and radiation efficiency above 95 %;
besides that, the antenna is required to be compact and adequate for low cost mass production.
Table 1.2 – Millimetre-Wave Communication Systems Specifications
Wireless HD HAP
Frequency spectrum [GHz] 57 - 66 47.2 – 47.5 ; 47.9 – 48.2
Antenna Gain [dBi] 20 23
Elevation Scanning Width [Deg] ± 40 ± 60 (UAC)
The adopted antenna solution corresponds to a mechanically steerable antenna, due to its low cost
and overall efficient performance. There are two main possibilities when considering mechanical
steering antennas: reflectors or dielectric lenses or even both together, as shown in 1.1. Due to size
restrictions, an axial symmetric dielectric lens with a single material was adopted (a more compact
solution). Axial symmetric lenses were selected instead of a 3D optimized lens because the design
and fabrication process is much simpler. The antenna is formed by an axial symmetric lens pivoting
over a static feed, with the capacity of elevation and azimuth scanning, avoiding the use of expensive
and fault prone millimetre wave rotary joints. The feed is intended to have moderate gain, as a result
of a compromise between its dimensions and an efficient lens illumination. On one side the feed must
be small enough to allow the lens to tilt (producing a wider beam) and, on other hand, a narrow beam
should efficiently illuminate the lens with low spillover, which increases the feed’s size. The primary
feed is responsible for narrowing the beam; however, in order to obtain the required output high gain,
the lens must be able to increase the antenna output directivity. The overall output gain,
corresponding to the far field radiation pattern gain of the antenna, as well as the low gain beam
steering loss can be accomplished by appropriate shaping of top and bottom lens surfaces.
At millimetre waves the classical solutions tend to be more complex, larger and more costly than the
proposed antenna. The lens design is based upon Geometrical Optics (GO), taking advantage of the
existing Integrated Lens Antenna Shaping software tool (ILASH) [23], [24].

8
Regarding the antenna requirements and its previously described structure, the designed lens must be
able to increase the overall gain and further steer the beam while pivoting in front of the fixed feed.
When considering high gain lenses, the best solution is a collimated lens with a reasonably large
surface, so the radiation departing from the lens is focused on a specific direction, increasing the
beam directivity. With collimating lenses, Figure 1.6, an incident beam travelling parallel to the lens
axis is converged into a specific point, defined by the lens focus, where the lens focal length
corresponds to the distance travelled beyond the lens till its focus.
Figure 1.6 – Collimating lens
The lens is supposed to tilt over a stationary feed, which indicates that the feed cannot be integrated
at the lens base, but it must be placed outside the lens body, in air. As seen in Figure 1.6, the lens has
two surfaces that can be appropriately shaped accordingly with specific desired targets. When
designing the lens the number of surfaces represents the available degrees of freedom available. In
this case, one of the desired targets is the collimation of the output beam. In this way, the rays always
exit parallel to the lens axis, fulfilling the high gain requirement. The degree of freedom that is left can
be used for several purposes: to impose a scanning condition, to establish a well defined lens phase
centre, to optimize the maximum beam steering angle, to increase the lens maximum power transfer,
or efficiency, amongst many others.
In the present case, the second design condition will depend on the lens tilting configuration, as will be
explained next. For a steerable beam antenna, a collimated lens with a scanning condition seems the
obvious choice. Scanning lenses are characterized by focusing the incoming beams that arrive at the
lens from different directions. The focal region is a parabolic surface, Figure 1.7. The concept is
described in section 2. The lens is rotated in such a way that the feed phase centre always lies over
the lens focal surface. This means that the lens tilt-axis is centred with respect to its focal arc.
Lens focus
Focal length

9
Another solution, described in section 3, corresponds to tilt a collimated beam lens about its central
focal point. By not imposing a scanning beam condition to the lens, the extra degree of freedom is
available for the lens profile optimization concerning the antenna beam tilt performance, increasing the
maximum beam steering angle. Both configurations allow azimuth scanning by rotating the tilted lens
in relation to the feed axis, being able to produce a beam tilt of 360º in azimuth.
Figure 1.7 – Scanning lens antenna
The lens design concept is intended to be proven against the Wireless HD communication system
requirements, being the design principles valid for the HAPs service or any other application with
similar antenna properties. For this purpose a central frequency of 62.5 GHz is assumed and the lens
dimensions are chosen accordingly with that specific frequency.
Lens performance analysis is made using ILASH and Computer Simulation Technology FTDT
electromagnetic solver (CST). ILASH analysis corresponds to the hybrid Geometrical Optics/Physical
Optics (GO/PO) method. Although the GO/PO method used in ILASH is a fast and suitable tool when
considering axial symmetric lenses, only a full wave analysis can provide accurate results for the
presented lens configuration where the lens is quite small and the feed is placed outside the lens.
The developed scanning antenna, due to its unique characteristics, resulted on a patent request [14],
pending for validation (PT 104108), an accepted article [25] in the IEEE Transactions on Antennas
and Propagation Special Issue on Antennas and Propagation Aspects of 60 – 90 GHz Wireless
Communications and a submitted abstract [26] to the European Conference on Antennas and
Propagation, Berlin, Germany, March 2009.
θt
− θt
Focal arc θt

10
1.4. Thesis structure
This thesis is organized in four main sections that concerns lens design, antenna tests facilities, lens
measurements and conclusions.
In chapter 2, the concept of tilting the lens in a way that its focal arc always contains the feed phase
centre is studied for two different kinds of lenses: Abbe lens and Modified Abbe lens.
Chapter 3 presents a different perspective for achieving a mechanical beam steerable lens, on which
the lens tilt axis is passing through the lens focal point. Two different approaches of collimated lenses
are used: a classical one that corresponds to an elliptical lens; and a second one where the two lens’
surfaces are optimized in order to increase both lens maximum scanning angle and radiation
efficiency.
Fabricated prototypes and measurement lens results are presented in chapter 4, as well as anechoic
chamber control and measurement software update.
Conclusions are drawn in chapter 5, describing the main achievements of this research study and
indicating possible future work in order to apply this design concept into other applications.

11
2. Lens tilted accordingly with its focal arc
Collimated lenses are often used for scanning purposes, because with proper design and proper feed
displacement, a high gain beam is able to cover a large angular interval with acceptable gain scan
loss. However, in order to obtain a good scanning characteristic, the lens design formulation must
include a scanning condition. There are many examples of scanning lenses, such as the Abbe sine
condition lens [27] (described ahead) or the Bifocal approach [28].
Figure 2.1 presents an example of a scanning lens, whit an inset representing the lens directivity
calculated for several feed positions in the x-z plane. The scanning lens evaluation was performed in
[29], which also presents design guidelines and assesses the performance of high dielectric constant
double-material integrated lens antennas intended for imaging or scanning applications. The double
shell lens was obtained using the Abbe design condition. The inner shell material is Alumina, with
permittivity εr = 9.8 and the outer shell is ECCOSTOCK with permittivity εr = 3.13. The feed is a
tapered dielectric-filled (εr = 8.8) TE10 waveguide with an aperture of 1.4 mm x 1.4 mm. The feed
radiation pattern is almost rotationally symmetric with 7.4 dBi directivity and linear polarization at
f = 62.5 GHz.
The image on the right of Figure 2.1 is a magnification of the coloured inset on the left.. The directivity
is calculated from the lens radiation pattern (PO simulations), therefore it is feed dependent. Directivity
is reasonably high and constant for a feed trajectory close to a parabola (the red coloured area). This
trajectory of the feed is called the lens focal arc. The dashed line superimposed on the directivity
results represents the GO approach (ray tracing analysis) for the theoretical shape of the lens focal
arc. The best directivity region closely follows the GO focal arc being the slight discrepancy explained
by diffraction effects and by the lack of axial symmetry of the feed radiation pattern.
Figure 2.1 – Example of the directivity obtained for a scanning lens with the feed being
displaced along the x and z axis. The dashed line represents the geometrical optics focal arc.
+

12
The classical approach for beam steering antennas (multi-beam antennas), where the lens is fixed
and an array of multiple feeds is distributed along the lens focal arc presents a severe difficulty at
millimetre waves. In fact, switching of phasing circuits are costly and introduce losses. To avoid the
use of several sensors, a different configuration is presented in this section. A single static feed is
centred with the lens focal arc and the lens is tilted in a way that its phase centre trajectory always
falls on the focal arc. The tilt axis passes through the focal arc centre, considering that the focal arc
can be closely approximated by a circumference. Figure 2.2 shows the concept.
The configuration and ray tracing of the lens is presented in Figure 2.2, where θlens is the lens tilt
angle, θbeam is the beam tilt angle in relation to the feed axis and θbl is the beam tilt angle in relation to
the lens axis. When the static feed scans the lens focal arc (by tilting the lens) an angular interval is
covered θbeam, which is not coincident in practice with the lens tilt angle θlens, being the |θbl| angle the
difference between both. As shown in Figure 2.2, the beam tilts in the opposite direction of the lens tilt
angle θlens, considering the lens symmetry axis as reference. In this way the beam tilt with respect to
the feed axis θbeam, is always smaller than the lens tilt, which represents a great disadvantage of this
approach: large lens tilt angles are required in this case, but this represents higher scan loss, due to
poor illumination of the lens.
Figure 2.2 – Mechanical beam steerable lens using scanning lens approach
The θbl angle is given by the lens scanning properties, corresponding to the lens scanning angle when
the lens is static and the feed is placed over the lens focal arc. When considering a static scanning
lens, the main goal is to obtain the highest maximum scanning angle possible, with the feed being
slightly displaced along the lens focal arc. As will be seen ahead, when using the proposed beam
steering antenna the scanning lens must present the opposite behaviour, with the smallest θbl angle
possible for a wide displacement of the feed.
θlens
θbl
Lens tilt axis
Lens trajectory
Lens focal arc
θbeam
Lens axis
Feed axis
Feed

13
The focal arc defines the lens tilting trajectory and therefore the maximum lens tilt angle θlens_max.
Together with the maximum scanning angle of the lens θbl_max, the maximum beam tilt angle θbeam_max
of the antenna is defined by:
����� = ���� + ��� (1)
The ILASH software tool [23] was used for lens design and analysis. The design procedure is based
on GO methods. This formulation derives from the asymptotic solution of Maxwell equations when
considering high frequencies. This is due to the fact that when the overall lens dimensions are large in
terms of wavelength, the wave propagation inside an homogeneous isotropic lens can be modelled as
ray tubes emanating from the phase centre of the source along straight rays, with amplitude weighted
by the radiation pattern of the source and decaying with path length in the inverse proportion of the
square root of the tube cross-section and the phase given by the electrical path length [30]. The
GO/PO analysis method makes use of the GO formulation to calculate the lens surface currents and
further integration of the surface currents through PO formulation allows obtaining the radiation
pattern.
The ILASH tool accepts only axial symmetric lenses and they cannot be tilted. But on the other hand,
the feed can be placed anywhere inside the lens and can be tilted at will. Considering this, it is
possible to simulate the lens tilt by appropriately placing and orienting the feed. Figure 2.3 presents
the equivalence between ILASH and real lens tilt models. In Figure 2.3 a) is presented the real model,
with the lens being tilted over the static feed and in Figure 2.3 b) the corresponding ILASH model.
With ILASH software tool, instead of tilting the lens by θlens angle, the feed is placed at the appropriate
off-axis position (moved by θlens angle along the focal arc) and it is tilted by θfeed = -θlens.
a) b)
Figure 2.3 – Lens tilt configuration: a) Real model; b) ILASH model.
θbeam
θbeam
θlens θlens
θbl
θbl
θfeed
θlens

14
The beam direction of the radiation pattern obtained with ILASH is relative to the lens axis and it
corresponds to the θbl angle. However, in the real lens tilt, when changing the axis from the lens to the
feed, the beam tilt angle is given by (1) and so, the far field radiation pattern for the tilted lens in order
to the feed axis can be obtained by simply shifting the ILASH radiation pattern by θlens.
An Abbe lens (with equivalent Bifocal input parameters) is studied as the first approach to evaluate the
viability of the scanning lenses for mechanical beam steering antennas and then an improvement is
made recurring to the Modified Abbe method, slightly different from the simple Abbe lens method.
2.1. Abbe lens (Bifocal design)
2.1.1. Lens formulation
Amongst the most common scanning lenses, the Abbe sine lens [27] is known to be free from comma
aberration for a small feed displacement away from the lens axis, representing a good candidate for
the beam steerable lens. However, when considering a scanning lens, the most convenient
formulation is the Bifocal one [28], because the input parameters already establish the lens maximum
scanning angle and the maximum feed offset, characteristics that define the scanning lens
performance. Equivalence between parameters from both methods is presented in [30], allowing one
to use the Bifocal input parameters together with the advantages of the Abbe sine lens formulation.
ILASH already integrates this feature and so the process is fully transparent to the user. Both methods
are described ahead.
The Bifocal design imposes that all rays originated at two symmetrical focal points x = a and x = - a,
located Fb below the lens surface, exit the outer lens surface parallel to θbl_max and – θbl_max maximum
scanning directions, respectively, see Figure 2.4. The formulation includes Snell’s laws, path length
conditions and scanning constraints. The lens analytical form is completely described in [28].
Figure 2.4 – Bifocal design
θbl_max
F
T
a -a
D
F
Fh
ε1
ε1
ε2

15
When using this method, just a small number of points on the lens profile is usually obtained and so,
intermediate points need to be interpolated. An adaptation was used in ILASH, based on a cubic
interpolation routine, in order to obtain a lens profile with a reasonable number of points. The lens
surfaces are generated from the calculated profiles using revolution symmetry. A more detailed
description is found in [30]. Lens axial depth is defined by F and T, while lens maximum diameter is
defined by D. The lens, with material permittivity ε2 is embedded in air ε1. The lens scanning
performance is characterized by the symmetrical focal points x = a, x = -a, the Bifocal focus distance
Fb and the maximum scanning angle θbl_max. The optimum path, with minimum aberrations, for the feed
displacement, corresponds to the parabolic arc, which defines the lens tilt angle when performing the
mechanical beam steering.
The Bifocal lens antenna formulation presents some limitations, which can be mitigated by obtaining
the equivalent Abbe lens. In this case, the Abbe lens antenna will inherit the scanning characteristics
from the Bifocal formulation with the advantage of a well discretized lens surface, minimizing refraction
errors at the lens interfaces. When relating Bifocal approach to Abbe sine condition, the focus distance
for on-axis position is defined by F = Fb + Fh. When travelling the feed along the lens focal arc, the ray
tracing is exactly the same as presented for the Bifocal design, Figure 2.4, since both lenses are
identical. A full description of the relation between the Bifocal and Abbe design parameters are
presented in [30].
The Abbe sine condition, explained ahead, is satisfied when the intersection points of the extended
rays departing from the on-axis sensor and the corresponding extended transmitted rays all lay on a
circumference centred at the sensor [27] - [30]. The Abbe sine lens geometry is presented in
Figure 2.5. As previously indicated on Bifocal lens, its height is given by F and T, being the focus
distance and the lens thickness respectively. The inner lens shell is defined by r (θ) while the outer
shell is represented by the length l (θ) and the angle γ (θ). The Abbe sine condition imposes that the
extended rays r (θ) departing from the source and the corresponding extended transmitted rays s (θ)
intersect on a circumference centred at the source, with radius fe.
Figure 2.5 – Abbe sine lens
s
γ
l
fe
r
θ F
T
Abbe
circumference
ε2
ε1
ε1

16
The Snell law condition at the inner shell interface leads to:
�� ��
�� = √�������� ���√�������� ����� � �� (2)
When imposing an electrical path length condition we get:
� + √��� = � �� + √��� �� + �� (3)
with
�� = � + � − � ��"# �� − � ��"# �$ ��� (4)
The Abbe sine condition, regarding the geometry presented in Figure 2.5, can be written as:
%&� − � ��' () �� = � �� ()%$ ��' (5)
The presented equations (2)-(6) are solved simultaneously in order to obtain both lens interfaces. A
more detailed description of the Abbe sine lens is made in [30].
When travelling the feed along the lens focal arc, with the lens fixed, the lens is able to scan between
– θbl_max and θbl_max. By rotating the lens by θlens angle accordingly with its focal arc centre, considering
the lens focal arc approximately spherical, a mechanical beam steering θbeam is achieved, negatively
influenced by the scanning angle of the lens θbl. The best result would correspond to a wide tilt of the
lens with a small scanning angle.
2.1.2. Lens design
A lens was then designed considering the stated formulation to cope with the Wireless HD
communication system. To ensure good radiation efficiency, the low loss polyethylene material
(εr = 2.35, tan δ = 0.0004) was chosen. Due to the limited size of available polyethylene material at the
IT laboratory and regarding material losses, a lens was designed with the following dimensions: lens
Bifocal focus distance of Fb = 24.5 mm, lens thickness equal to T = 12.7 mm with a diameter of
D = 27 mm. The maximum feed offset, that defines the wider move of the feed, is placed near the lens
border, equal to a = 12.7 mm, with a maximum scanning angle of θbl_max = 21º. With ILASH software
tool, the obtained Bifocal lens [28] is internally adapted to the Abbe lens [27] equivalent, presenting a
focal height of Fh = 7.5 mm. The equivalent input parameters of the Abbe lens are given by the focal
distance, defined by F = Fb + Fh = 32 mm, the lens thickness T = 12.7 mm and the Abbe
circumference radius fe = 40.6 mm. The lens is presented in Figure 2.6. Expression (1), together with
Figure 2.3, shows that the beam tilt angle θbeam is negatively influenced by the lens scanning angle
(equivalent to the θbl angle). When using a scanning lens rotating about its focal arc centre, the best
beam steering performance is achieved for a small maximum scanning angle and a big maximum feed
offset.

17
a) b)
Figure 2.6 – Abbe lens made of polyethylene: a) lens profile; b) lens surface.
Since ILASH imposes that the feed is included inside the lens body (ILASH tool is tailored for
integrated lens antennas), a cylindrical base was added down to z = -10 mm. The cylindrical base has
two shells, an inner air shell and a very thin outer shell of polyethylene. This configuration is only valid
when the feed radiation is not illuminating the lens base. A ray tracing for on-axis and off-axis position
shows that the base corresponds to a total reflection area, which leads to a decrease in efficiency and
gain, however, the main beam is correctly calculated. This represents a major difficulty, since ILASH is
prepared to work with the feed integrated at the lens base, not outside the lens, in air, as it is the case.
The main points that define the lens focal arc are the central focal point, located at the lens origin (0,
0) mm, and the two extreme points of focusing (a, Fh), (-12.7, 7.5) mm and (12.7, 7.5) mm,
corresponding to the maximum feed offset defined with Bifocal parameters. As can be seen in Figure
2.7 a), the rays are exiting the lens parallel to the lens axis, when the feed is placed at the lens origin
and tilted by 21º for the offset position, as established during the design stage. The correspondent
parabolic focal arc is given by:
* = 0.046501 (6)
Assuming that the focal arc corresponds to a circle containing all three focal points presented, the
focal arc centre is placed at (0, 14.5) mm, wide below the lens. The Figure 2.7 presents the ray tracing
for centered and extreme position of the feed. The feed is moved around the drawn circle, which
represents the scanning lens focal arc. The configuration on Figure 2.7 b) represents the feed placed
at the maximum feed offset position a = -12.7 mm. When moving the feed along the lens focal arc, the
feed is tilted in the opposite direction, what may lead to a poor feed illumination of the lens. In
Figure 2.7 b) it is shown that when the feed is placed on the maximum feed offset position, its
radiation main beam is not pointing to the lens, as the feed axis is not crossing the lens. The ray
tracing enables one to say that the incident power at the lens surface is negligible when compared to
the feed total power. When tilting the lens or the feed as explained before to near the maximum feed
offset position, the lens spillover becomes truly relevant, leading to very high gain beam steering loss.

18
a) b)
Figure 2.7 – Abbe lens’ ray tracing: a) on-axis position (0, 0) mm; b) maximum feed offset
position (-12.7, 7.5) mm.
For both positions presented, the feed is illuminating the Abbe lens with a total angle close to 40º,
which means that rays are departing from - 20º to 20º for on-axis position and approximately from
-θfeed to 40º - θfeed for off-axis position. The feed tilt angle θfeed is given by the circle arc described by
the feed displacement along the lens focal arc, as shown in Figure 2.8. For the maximum feed offset
position, the lens tilt corresponds to:
�2��3 = sin�� 7�89 (7)
with a = -12.7 mm and the circumference radius R = 14.5 mm, θfeed = -θlens = 61º.
Figure 2.8 – Feed tilt angle.
R
a
θfeed
feed axis
40º
focal arc radius
40º

19
Using ILASH, being the lens fixed, the feed is positioned at the off-axis position, oriented accordingly
with the respective lens tilt θlens. From now on this corresponds to the off-axis position, or tilted position
of the lens. Considering Figure 2.7 b) and the calculated θfeed angle, the lens just manages to focus
the rays departing from -61º to -21º in relation to the feed axis. For the maximum lens tilt angle
θlens_max, the radiation pattern maximum is not even illuminating the lens, favouring very high scan loss.
As mentioned before, the lens is supposed to tilt over a static feed, specifically over a horn antenna.
Lens and horn antennas dimensions must be carefully obtained considering a compromise between a
reasonably small size of the overall structure and the intended gain of the antenna. A circular horn
antenna with moderate gain was designed in order to efficiently illuminate the lens with low spillover.
For this purpose a circular horn antenna with a full beam width of about 70º at -10 dB was adopted,
see 2.2.2. As the beginning start point, since the feed radiation pattern is approximately Gaussian, a
perfect Gaussian feed was used on the antenna evaluation. The Gaussian width of the feed was not
selected randomly; it corresponds to a moderate gain of about 13 dBi, closely to what is needed to
illuminate the lens in order to obtain an antenna gain higher than the 20 dBi recommended for the
Wireless HD standard.
ILASH radiation pattern simulations for f = 62.5 Ghz showed good agreement with what was expected
from the Bifocal formulation, a well defined off-axis beam at the intended angle position, θbl = 21º, with
similar directivity as for the on-axis feed position, around 24 dBi, suitable for the Wireless HD
standard. Figure 2.9 presents simulation results for on-axis and off-axis positions, both in the ϕ = 90º
plane. The low level of secondary lobes is explained by the lens structure adopted in ILASH
simulations, where all radiated power that is not illuminating the Abbe lens is not considered for the
lens radiation pattern, because, at the lens cylindrical base all incident rays are reflected back. Just
the top of the lens is contributing for the far field radiation pattern. Considering this configuration and
the results obtained for the off-axis position it is fair to say that at θfeed = 61º a new lobe should be
present, concerning the energy of the feed that passes outside the lens.
a) b)
Figure 2.9 – Abbe lens’ radiation pattern (ϕϕϕϕ = 90º) at f = 62.5 GHZ: a) on-axis position (0, 0) mm;
b) maximum feed offset position (-12.7, 7.5) mm.

20
A wide view of the radiated field for the off-axis position is shown in Figure 2.10, where the main
radiation lobe is visibly shifted on the ϕ = 90º plane, along the y-axis. This could be consider a good
result, although, as stated before, the presented radiation pattern is not accurate and a second lobe is
expected around 61º, the main direction of the feed’s far field radiation pattern.
Figure 2.10 – 3D radiation pattern for feed tilt of θθθθfeed = 40º.
The presented radiation pattern for the off-axis position is related to the lens axis, not to the feed axis.
Relative to the feed, that is stationary; the radiation pattern must be shifted by θlens = –61º,
corresponding to the lens tilt. Having the feed location as reference, for a lens tilt of θlens = - 61º, the
beam is tilted θbeam =- 40º, as shown in Figure 2.11.
Figure 2.11 – Radiation pattern (ϕϕϕϕ = 90º) accordingly with the feed axis, for a lens tilt of
θθθθlens = -61º, achieving a beam tilt of θθθθbeam = -40º.
The results for on-axis and off-axis positions are found in Table 2.1; however, as it is going to be
demonstrated ahead, the tilted case is severely affected by the radiated power that is not illuminating
the lens, because the main radiation beam of the feed is oriented in a way that it avoids the lens.

21
Table 2.1 – Directivity and beam tilt for both on-axis and off-axis feed positions
Lens Tilt [Deg] Directivity [dBi] Beam Tilt [Deg]
0 24.6 0
- 61 24.2 - 40
To suppress this erroneous ILASH results, due to the adopted lens structure, a different lens base was
used. When using the cylindrical base, the results are only valid for the lens itself, which means that
outside the feed illumination angle interval of -20 º to 20º for non-tilted lens and of -61º to -21º for
maximum tilted lens angle, the radiation pattern obtained is not correct and even inside that interval
the results are slightly different. Just the tilted case was studied, since it is the most affected. The
adopted shape corresponds to a circumference centered at the feed off-axis position, meaning that the
rays will pass through the lens base without suffering any direction refraction, although it suffers some
attenuation, but not very meaningful. This assumption is only valid for ϕ = 90º, because, as seen in
Figure 2.12, due to the fact that the lens is axial symmetric, the lens’s extension does not correspond
to a sphere. The rotation lens axis when drawn in ILASH is the z-axis, when it should be the axis
defined by the off-axis feed position. The ray tracing in Figure 2.12 a) shows the good behavior of the
lens base, however, this is just valid for the represented plane. Surface currents show a darker area
around θ = 60º, indicating the orientation of the feed. Since the surface currents are only correctly
estimated for ϕ = 90º, the far field radiation pattern must be considered a very rough approximation.
However, this should be enough to demonstrate the lens behavior when it is tilted.
a) b)
Figure 2.12 – Abbe lens with a spherical base with centre at (-12.7, 0) mm, source is located at
off-axis position: a) ray tracing b) surface currents.

22
By observing Figure 2.13, a significant side lobe level is seen around θ = 60º. For a lens tilt of
θlens = - 61º, which corresponds to a beam tilt of θbeam = – 40º, the radiated power that illuminates the
lens is very low, making this kind of lenses not a viable solution.
Figure 2.13 – Radiation pattern (ϕϕϕϕ = 90º) obtained for the off-axis feed position with the Abbe
lens with a close to spherical base with centre at (-12.7, 0) mm.
The shown radiation pattern gives a reasonable idea of the lens behavior, making it unnecessary a full
wave CST simulation. The presented results indicate a poor scanning performance of the antenna,
therefore, a different scanning lens design method was considered. In the next section the Abbe
design method is slightly modified in order to increase the lens collimation area and therefore its
aperture. The major difficulty when using the Bifocal lens method, adapted to the Abbe configuration is
to efficiently illuminate the lens with reduced spillover. When trying to produce a small sized lens, with
the feed reasonably close to the lens, the lens aperture is significantly diminished, increasing the lens
scanning loss, when tilting it.

23
2.2. Modified Abbe lens
The Bifocal approach, used in the previous section, is very convenient when considering its input
parameters, allowing designing the lens accordingly with specific desired scanning characteristics,
however, by imposing two symmetrical focal points and respective scanning angles, the number of
available solutions is very limited. By using the Abbe lens design method, the control over the lens
scanning performance is not straight forward and the input parameters do not directly relate with its
scanning behaviour, however, the lens shape and aperture size is easily controlled.
To increase the number of degrees of freedom when designing an Abbe sine lens, the Abbe sine
condition was modified in such a way that the rays’ intersection curve could have other shapes instead
of a circumference; however, the scanning effect is slightly affected, with an increased comma
aberration. ILASH tool presents different shapes to replace the circumference from the Abbe sine
condition and those lenses are called Modified Abbe lenses. After several tests and simulations, the
curve that presented better results in terms of scanning corresponds to the ILASH formulation called
linear function defined by:
&� �� = &�: − ∆&� cos >�� (8)
where fe0, ∆fe and Q are free parameters to be optimized.
For the same reasons stated for the previous lens, the polyethylene material (εr = 2.35, tan δ = 0.004)
was chosen for the Modified Abbe lens. The lens dimensions are defined by a lens diameter equal to
30 mm, a focal distance of 12.5 mm and a lens thickness of 12.5 mm, Figure 2.15. The focal distance
is half of the obtained on the Bifocal lens, Figure 2.16, meaning that the feed is much closer to the
lens. The parameters values that define the intersection curve for the Abbe sine condition correspond
to:
• fe0 = 19.5 mm;
• ∆fe = 0.425 mm;
• Q = 1.06.
The intersection curve is closely approximated by a circumference of radius 19.075 mm, Figure 2.14;
however, by slightly lifting the curve, it allows a wider angle of incident rays, leading to wider scan
angles and better efficiency.
Figure 2.14 – Modified Abbe lens intersection curve compared to the Abbe lens curve.
circumference
linear
function

24
a) b)
Figure 2.15 – Modified Abbe lens made of polyethylene: a) lens profile; b) lens surface.
The maximum feed offset, located at (-7, 5.1) mm with θbl = 24º (orientation of the rays exiting the
lens), is closer to the lens, which improves the lens performance when tilted, in comparison to the
Bifocal lens, Figure 2.16. Considering the focal arc points, its shape can be described by:
* = 0.10401 (9)
The focal arc center, for a circumference approximation, is positioned at (0, 7.35) mm. The feed
illumination of the lens is much wider than for the Bifocal lens, covering the θ = -50º to θ = 50º angular
interval for on-axis position; twice of the obtained with the previous method.
a) b)
Figure 2.16 – Modified Abbe lens’ ray tracing: a) on-axis position (0, 0) mm; b) maximum feed
offset position (-7, 5.1) mm.

The maximum feed offset corresponds to a maximum scanning angle of
focal arc rotation, to a lens tilt equal to
was performed along the focal arc, using ray tracing analysis and the obtained results are presented in
Table 2.2.
Table 2.2 – Feed positions and lens tilted angles for sequentially beam tilt
Feed position [mm] Beam tilt relative to lens axis
(-1.9, 0.25)
(-3.675, 0.985)
(-5.46, 2.43)
(-6.49, 3.9)
(-7, 5.1)
Figure 2.17 illustrates the linear relation between the lens tilt and the
making a full GO/PO analysis. The curve is approximately close to
with θbeam as the beam tilt and θlens as the lens tilt.
Figure 2.17 – Beam tilts
The Modified Abbe lens performance, when just considering the ray tracing analysis, presents a great
improvement in comparison to the Bifocal
does not allow to obtain accurate simulations, therefore, a complete CST simulation had to be
considered in order to properly evaluate the Modified Abbe lens scanning properties. The lens was in
first place studied with ILASH, considering the same Gaussian feed used for the
and, afterwards, CST and ILASH simulations were made using a real
25
The maximum feed offset corresponds to a maximum scanning angle of θbl = 24º and, c
focal arc rotation, to a lens tilt equal to θlens = – 72º, corresponding to a beam tilt of θbeam
was performed along the focal arc, using ray tracing analysis and the obtained results are presented in
Feed positions and lens tilted angles for sequentially beam tilt values using ray
tracing method
Beam tilt relative to lens axis (θbl) [Deg] Lens tilt (θlens) [Deg] Beam tilt
5.5 - 15
11 - 30
17 - 48
21.5 - 62
24 - 72
linear relation between the lens tilt and the beam tilt, confirmed ahead when
curve is approximately close to:
����� = 0.63����
as the lens tilt.
tilts evolution with lens’ tilts for the Modified Abbe lens.
The Modified Abbe lens performance, when just considering the ray tracing analysis, presents a great
improvement in comparison to the Bifocal (Abbe) one. As seen before, the ILASH lens model adopted
btain accurate simulations, therefore, a complete CST simulation had to be
considered in order to properly evaluate the Modified Abbe lens scanning properties. The lens was in
first place studied with ILASH, considering the same Gaussian feed used for the Bifocal
and, afterwards, CST and ILASH simulations were made using a real feed, a circular horn antenna.
24º and, considering the
beam = - 48º. A run
was performed along the focal arc, using ray tracing analysis and the obtained results are presented in
values using ray
Beam tilt (θbeam) [Deg]
- 9.5
- 19
- 31
- 40.5
- 48
, confirmed ahead when
(10)
for the Modified Abbe lens.
The Modified Abbe lens performance, when just considering the ray tracing analysis, presents a great
As seen before, the ILASH lens model adopted
btain accurate simulations, therefore, a complete CST simulation had to be
considered in order to properly evaluate the Modified Abbe lens scanning properties. The lens was in
Bifocal (Abbe) lens
feed, a circular horn antenna.

26
2.2.1. PO lens analysis with Gaussian feed
As for the Bifocal (Abbe) lens, a Gaussian feed with 70º of full beam width at -10 dB was used.
Figure 2.18 illustrates the radiation pattern at f = 62.5 GHZ calculated with ILASH tool for several feed
locations along the focal arc. The lens base model adopted is similar to the one used on the previous
section (cylindrical base), which also indicates that the lens far field radiation pattern is not accurately
calculated. The spherical base was not adopted here since no improvement is guaranteed with such
configuration. The Gaussian feed width, allied to an increasing feed tilting angle indicates that the far
field radiation pattern presents a higher side lobe level than was simulated, especially on the direction
of the feed tilt angle θfeed. ILASH is not the most appropriate tool for this kind of lenses, with the feed
placed outside the lens, however it can present reasonable results with very short computation time.
By considering a Gaussian feed, that closely approximates the radiation pattern of a known real feed,
important information about the lens performance can be anticipated through very easy procedures
requiring very short computation time. The main beam position, or beam tilt, as will be seen ahead,
closely agrees with the results from CST simulations. This is the reason why ILASH tool was selected
for lens design, making it possible to optimize a final solution within acceptable lap of time.
a) b)
c) d)

27
e) f)
Figure 2.18 – Modified Abbe lens’ radiation pattern (ϕϕϕϕ = 90º) with Gaussian feed at f = 62.5 GHZ,
positioned at: a) on-axis position; b) (-1.9, 0.25) mm; c) (-3.675, 0.985) mm; d) (-5.46, 2.43) mm;
e) (-6.49, 3.9) mm; f) (-7, 5.1) mm.
The radiation pattern main beam is coincident with was predicted by the ray tracing analysis, for all
feed positions tested along the focal arc. Table 2.3 represents the directivity evolution by tilting the
lens and therefore the beam. Directivity changes from 25.8 dBi to 24.28 dBi, representing a significant
1.52 dB scan loss. However, when the lens is tilted (or in this case, the feed) the radiated power that
illuminates the cylindrical base increases significantly. But its influence is not considered on the ILASH
simulations, which makes it mandatory the use another application to obtain a more accurate analysis,
namely the CST FDTD electromagnetic solver.
Table 2.3 – Directivity of the radiation pattern obtained for the several lens tilts with Gaussian
feed
Lens tilt (θlens) [Deg] Beam tilt relative to lens axis (θbl) [Deg]
Beam tilt (θbeam) [Deg] Directivity [dBi]
0 0 0 25.8
15 5.5 -9.5 25.74
30 11 -19 25.26
48 17 -31 25
62 21.5 -40.5 24.73
72 24.5 -48 24.28

28
When the feed is tilted by θfeed = 62º, the feed main beam axis hits the lens surface at x = 9.7 mm,
close to the border (the lens radius is around 15 mm), meaning that a high fraction of the incident
power spills over the lens border. The 3D radiation pattern for a beam tilt of θbeam = 40.5º is shown in
Figure 2.19.
Figure 2.19 – 3D radiation pattern of the Modified Abbe lens fed by the Gaussian feed with
θθθθfeed = 62º tilt.

29
2.2.2. Circular horn feed
Although the design decision pointed to a circular horn as the lens feed, printed feed solutions
integrated at the base of a small hiper-hemispheric lens could also be considered good candidates.
The hiper-hemispheric lens would be responsible for increasing the printed feed gain.
The horn antenna was designed to have circular polarization and a full beam width at -10 dB of about
70º. Circular polarization was used in order to minimize polarization mismatch that can occur in
line-of-sight links with linear polarization portable equipment. The feed was designed in CST [31], and
the resulting dimensions are presented in Figure 2.20. The diameter of the circular waveguide was
determined by to the desired directivity and overall size of the feed.
Figure 2.20 - Circular horn and waveguide.
The circular horn far field radiation pattern for f = 62.5 GHz is shown in Figure 2.21, presenting a gain
of 13.7 dBi. For f = 57 GHz and f = 66 GHz simulations, the gain is 13.3 dBi and 14.4 dBi, respectively.
Figure 2.21 – Horn far-field radiation pattern for f = 62.5 GHz.
10mm
10mm
7.8mm
3.9mm

30
In Figure 2.22 the main planes of the far field radiation pattern are shown for the frequency interval
from f = 57 GHz to f = 66 GHz (Wireless HD standard spectrum). The beam width is close to 64º in the
ϕ = 0º plane and 78º in the ϕ = 90º plane for the three frequencies presented.
a) b)
Figure 2.22 - Horn far field radiation pattern for the 57 GHz to 66 GHz frequency spectrum:
a) ϕϕϕϕ = 0º; b) ϕϕϕϕ = 90º.
The input reflection coefficient of the horn antenna is presented in Figure 2.23. It can be seen that the
bandwidth of this antenna includes the entire spectrum of the Wireless HD standard, with the |s11|
parameter always below -20 dB. According to the simulations, radiation efficiency is always above
98% for the entire bandwidth. These results show that the circular horn antenna is appropriate for the
whole spectrum of the Wireless HD standard.
Figure 2.23 – Simulated amplitude of the input reflection coefficient of the horn antenna.
The next step was to include the horn into the ILASH and CST simulations. The horn radiation pattern
is used as the feed for the ILASH lens model, while with CST the full horn model is included on the
lens antenna analysis.

31
In order to improve the preliminary prediction from the ILASH simulation, CST tool was used in order
to obtain an accurate lens analysis, although the total computation time in CST is considerably larger
than in ILASH. The CST model is shown in Figure 2.24 (non tilted position presented).
Figure 2.24 – CST model of the modified Abbe lens with circular horn and waveguide.
The far field radiation pattern of the antenna is presented in Figure 2.25 for non tilted lens position.
The directivity is about 24.13dBi, largely complying with the Wireless HD requirements.
Figure 2.25 – Far field of the Modified Abbe lens with circular horn and waveguide.
Figure 2.26 presents the far field radiation pattern for each tilted angle of the lens, using CST. To
achieve a high scanning angle, the lens must tilt by a large angle, leading to high scan loss, since the
horn antenna radiated power spills over the lens border. It is seen that by tilting the lens, a second
lobe gains relevance on the direction of the feed main beam.

32
Figure 2.26 – Evolution of the beam tilt with the lens tilt; CST antenna model and far field
radiation pattern from not tilted to θθθθlens = -62º of lens tilt with a step of closely 15º.

33
The antenna S11 parameter for non tilted lens is shown in Figure 2.27 on the interval from f = 50 GHz
to f = 70 GHz, including the entire bandwidth available for Wireless HD communication systems. The
results are slightly worst when compared to the free space feed. However, the lowest transmitted
power occurs around f = 60 GHz, and is still -13 dB of reflected power. When the lens is tilted, |s11|
parameter is always below -15 dB, see Figure 2.28; the non-tilted lens case is not so affected by the
presence of the lens because the reflected power at the lens base surface for the main beam direction
is not oriented back to the feed.
Figure 2.27 – Antenna S11 parameter on the interval 50 GHz to 70 GHz for non tilted lens.
Figure 2.28 – Antenna S11 parameter on the interval f = 50 GHz to 70 GHz for lens tilt angles
from θθθθlens = 15º to 72º.

34
The radiation pattern obtained with ILASH in the ϕ = 90º plane for the six feed positions with specific
tilted angles (with the feed position as reference) is superimposed on the CST simulations in Figure
2.29. Both tools consider the circular horn feed described before. The differences between both
software tools are explained by the lens extension adopted in ILASH and also by neglecting internal
reflections when using ILASH.
a) b)
c) d)
e) f)
Figure 2.29 – Modified Abbe lens’ radiation pattern with circular horn feed at f = 62.5 GHZ for
several tilted angles of the lens along the ϕϕϕϕ = 90º plane, lens tilted (θθθθlens) of:
a) 0º; b) -15º; c) -30º; d) -48º; e) -62º; f) -72º.

35
When tilting the lens the side lobe level increases significantly, deteriorating the lens scanning
performance. Directivity, as demonstrated in Table 2.4, is slightly smaller than predicted by ILASH.
Considering the directivity variation with the lens tilt angle and the 2 dB margin established as the gain
scanning loss limit, the beam tilt interval where this lens suites the Wireless HD standard is less than
±30º; besides, the side lobe level for this maximum tilt is of the order of -12 dB, which can be
considered relatively high.
Table 2.4 – Directivity of the radiation pattern obtained for several lens tilts with the circular
horn as the feed
Lens tilt (θlens) [º]
Beam tilt (θbeam) [º] Directivity [dBi] Gain [dBi] (CST)
ILASH CST ILASH CST
0 0 0 25 24.13 24.02
-15 -9.5 -9.5 24.8 23.83 23.45
-30 -19 -19 24.11 23.29 23.18
-48 -31 -30 23.62 21.98 21.89
-62 -40.5 -38.5 23.24 20.62 20.52
-72 -48 -46 22.88 18.59 18.49
Although the antenna radiation efficiency is above 95% for the entire scanning interval, the antenna
performance is severely affected by the high gain scan loss due to the adopted lens configuration.
This sort of scanning lenses require very large lens tilt in order to produce a reasonable beam tilt,
leading to a high gain beam steering loss when trying to comply with Wireless HD requirements.

36

37
3. Lens tilted in relation to its focal point
In the previous section it was seen that in order to provide high scanning angles, the beam tilt should
closely follow the lens tilt, because wide lens’ tilts lead to high gain scan loss. A new antenna
configuration is presented in this section to address this problem. The main goal of this antenna
configuration is to obtain a steerable lens that is able to focus accordingly with the direction of the
lens, which means that the radiated beam follows the lens axis. As previously mentioned, collimating
lenses focus all incident rays along the lens axis direction, when the feed is placed at the lens phase
centre; considering this, by tilting the lens in relation to its phase centre, the rays immerging from the
lens are still parallel to the lens axis, focusing the beam into the desired direction. In Figure 3.1 it is
shown the lens tilt configuration, demonstrating that the lens phase centre is always coincident with
the lens tilt axis. With this configuration the rays exit the lens with an inclination θbeam, which
corresponds to the lens tilt angle θlens. Considering just GO, one can say that the antenna beam tilt
exactly matches the lens tilt angle.
Figure 3.1 – Mechanical beam steerable lens with lens tilted in relation to its phase centre.
With this lens configuration the same problem is found for ILASH simulations as for the previous
section. Since one cannot tilt the lens with ILASH software tool, the feed must be tilted appropriately.
Since the feed position corresponds to the lens phase centre, in relation to which the lens is tilted, by
observing Figure 3.2 it is visible that by tilting the feed by θfeed, a lens tilt of -θlens is obtained. In a very
simple way, the following relations are considered, strictly for the geometrical optics analysis:
����� = ���� = −�2��3 (11)
and, to obtain the far field radiation pattern considering the lens tilt, instead of the feed tilt, the ILASH
results must be shifted by θlens.
θbeam
θlens
Lens tilt axis
Lens trajectory
Lens axis
Feed axis

38
a) b)
Figure 3.2 – Lens tilt configuration: a) Real model; b) ILASH model.
In the former section, when tilting the lens accordingly with its focal arc, the second shaped lens
interface was used to fulfil the lens scanning condition, while for the configuration presented here no
scanning condition is needed, leaving the extra degree of freedom to optimize any of the lens
performance characteristics.
Two lens geometries are presented: a first one based on a single refraction surface, which allows
understanding the concept configuration and a second one, a double refraction lens, optimized in
order to improve its performance. The first choice when considering collimated lenses was the
elliptical lens, a very well know lens with good focusing properties, although used more with integrated
feeds. The second lens was designed considering its two shaped interfaces and therefore an extra
degree of freedom is available, allowing optimizing the lens beam steering performance when
mechanically tilted. While one interface enables to focus the rays in the direction of the lens axis, the
other can be used in order to increase the antenna scanning performance. For simplicity the designed
lenses are onward referenced also as L1 and L2.
θbeam
θbeam θlens
θlens
θfeed

39
3.1. Steerable elliptical dome lens
An elliptical lens is a common example of a collimating lens [32]. With the feed integrated at the lens
base, placed at the ellipse focal point, all rays emerging from the lens surface are parallel to the lens
axis. This means that by tilting the lens accordingly with the feed phase centre position, Figure 3.3, the
rays exit parallel to the lens axis, showing an almost exact correspondence between the lens tilt and
the beam tilt. The linear relation found in this case (considering GO) between θlens and θbeam is
approximately unitary, making it a more suitable solution.
In an usual elliptical lens the feed is integrated inside the lens or at the lens base and so, in order to
allow the lens movement, while the horn is static, the same approach was adopted as in [33] for a
LEO satellite application. A spherical air dome concentric with the ellipse focal point is opened at the
lens to allow it to be tilted and rotated without impairment from the feed, as seen in Figure 3.3. The
dome spherical shape eliminates refraction at the inner interface of the lens and thus no significant
change is produced on the lens’s outer surface illumination by the feed and consequently no relevant
modification appears in the lens far field radiation pattern.
Fixed feed
Fixed feed
α
Figure 3.3 – Ray tracing for steerable elliptical dome lens with non-tilted and tilted lens
(extracted from [25]).
The last focused ray in the edge of the elliptical lens exits the feed with an angle θmax in relation to the
lens axis. The maximum incidence angle θmax, defines the collimating region of the lens and for an
ellipse, considering GO, is defined till:
���A = B"# 7 �√��
9 (12)
where εr represents the lens material permittivity. Outside that region the rays are refracted away from
the main beam direction, increasing the side lobe level.

40
When the lens is tilted, the rays exiting the conical horn antenna (with a specific aperture) will
illuminate a smaller area of the lens outer surface collimating region, which will affect the lens gain
scan loss; a wider area outside the -θmax to θmax angle of incidence is strongly illuminated, contributing
for higher side lobe level.
When considering this lens tilting configuration, if the feed was omni-directional, the far field radiation
pattern obtained by tilting the lens would be exactly the same as if the entire structure formed by the
lens plus feed was rotated together.
The earlier presented feed (circular horn), was specifically designed for an elliptical dome lens. When
designing the feed aperture, two constraints had to be considered: the required gain to avoid
excessive spill over and the available space for the air cavity at the lens base that had to be large
enough to allow the lens tilt up to the specified maximum scanning angle without touching the feed.
The elliptical lens size is determined by the intended antenna gain, while the maximum scanning angle
is determined by the feed power at θmax angle of incidence. The maximum incidence angle of the lens,
when using the polyethylene material is θmax = 49.3º. In order to take advantage of the collimating
region, the feed power at θmax had to be negligible, which led to 13 dBi or 14 dBi directivity feed.
Using ILASH, an elliptical lens of polyethylene with an inner hemispherical shell of air was designed in
order to obtain a focused beam with directivity around 20 dBi for a Gaussian feed with full Gauss width
of 70º at -10 dB (similar beam width to the circular horn antenna). The achieved lens, onward
referenced as L1 for simplicity, is shown in Figure 3.4. The ellipse main axis presents radius of 13.18
mm and 10 mm, corresponding to a base radius of 10 mm and a lens height of 21.8 mm.
a) b)
Figure 3.4 – L1 lens of polyethylene (ILASH model): a) lens profile; b) lens surface.

41
The hemispherical air cavity has 8 mm radius and the lens was extended 5 mm downwards the centre
of the spherical cavity to avoid diffraction effects at the edge of the lens. The lens dimensions were
adjusted to allow a θlens = 40º tilt of the lens without touching the circular horn feed, defining in this way
the maximum lens tilt angle and approximately the maximum steering beam angle. For the described
Gaussian feed the L1 lens radiation pattern presents a directivity of 22.4 dBi.
By tilting the lens the feed illumination gradually exceeds the collimating region, defined by the θmax
angle. Considering the half beam width of the feed at -10dB, the maximum lens tilted angle can be
considered as:
�CDE _��� = ���A − ���:3H (13)
For this specific lens made of polyethylene, θmax = 49.3º, corresponding to a total collimating region
around 100º for the non tilted lens case (similar to the one presented for the Modified Abbe lens) and
considering the feed radiation pattern width, it means that for a lens tilt larger then θlens = 14.3º, a
portion of the feed main lobe power is not focused by the lens, increasing the side lobe level of the far
field radiation pattern. By tilting the lens, the power associated with undesired rays that exit the side of
the lens and are not focused with the main beam, becomes more relevant, Figure 3.5, which will affect
negatively the far field radiation pattern.
Figure 3.5 - Ray tracing for a lens tilt of θθθθt=20º with a full beam-width of the feed of 70º.
The CST L1 lens model is shown in Figure 3.6. The models for ILASH and CST are identical, being
the most significant difference the presence of the horn at CST, which influences the radiation pattern
when considering the reflected power at the spherical lens interface. This configuration was simulated
for different tilted angles θlens and for tilting the lens in both ϕ = 0º and ϕ = 90º planes of the horn.
Non-focused rays
70º
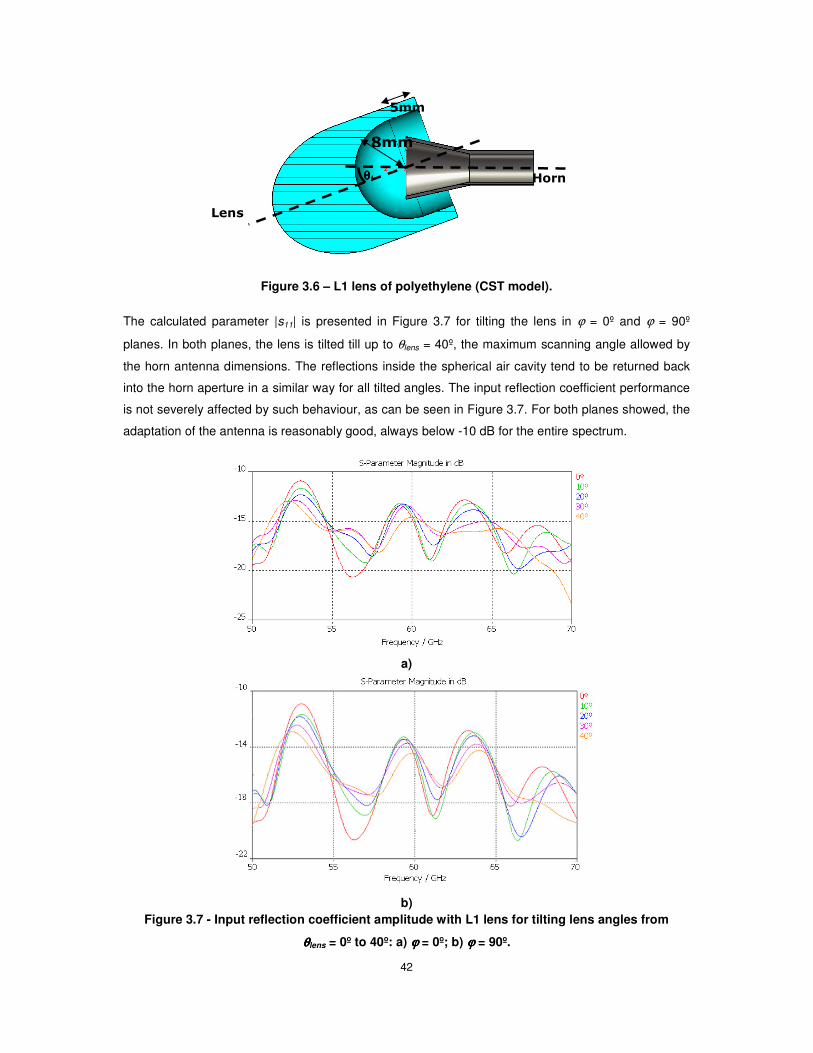
42
Figure 3.6 – L1 lens of polyethylene (CST model).
The calculated parameter |s11| is presented in Figure 3.7 for tilting the lens in ϕ = 0º and ϕ = 90º
planes. In both planes, the lens is tilted till up to θlens = 40º, the maximum scanning angle allowed by
the horn antenna dimensions. The reflections inside the spherical air cavity tend to be returned back
into the horn aperture in a similar way for all tilted angles. The input reflection coefficient performance
is not severely affected by such behaviour, as can be seen in Figure 3.7. For both planes showed, the
adaptation of the antenna is reasonably good, always below -10 dB for the entire spectrum.
a)
b)
Figure 3.7 - Input reflection coefficient amplitude with L1 lens for tilting lens angles from
θθθθlens = 0º to 40º: a) ϕϕϕϕ = 0º; b) ϕϕϕϕ = 90º.
θθθθt
Lens
Horn
5mm
8mm

43
The 3D far field radiation pattern for the non tilted lens case at f = 62.5 GHz is shown in Figure 3.8.
The correspondent directivity is 22.33 dBi with radiation efficiency above 96%.
Figure 3.8 – 3D radiation pattern for the non-tilted elliptical lens configuration.
In order to have a good perception of the steerable lens antenna performance for the entire scanning
space, being the lens tilted or rotated (meaning a beam rotation of 360º in azimuth and a beam tilt of
40º in relation to the feed axis), a beam tilt run was performed on both ϕ = 0º and ϕ = 90º planes of the
horn. Figure 3.9 presents the simulation results for both planes and although the feed radiation pattern
is different for both planes, the scanning behaviour is quite similar. Nevertheless, since the feed
presents different beam widths on both planes, the far field radiation pattern of the L1 lens follows that
same characteristic.
a)

44
b)
Figure 3.9 – Far field radiation pattern with L1 lens for tilting lens angles from
θθθθlens = 0º to 40º: a) ϕϕϕϕ = 0º; b) ϕϕϕϕ = 90º.
In order to confirm the broadband behaviour of the steerable lens, several simulations were run tilting
the lens on the ϕ = 0º plane for three frequencies: the central frequency f = 62.5 GHz and the two
other, at the Wireless HD spectrum edges, f = 57 GHz and f = 66 GHz. In Figure 3.10, for non tilted
lens, it is shown that for the lower frequency of the spectrum, in the ϕ = 0º plane, the far field radiation
pattern deviates slightly from the other frequencies performance, having a larger beam width and
higher side lobes, however, the difference is not very relevant.
a)

45
b)
Figure 3.10 – Far field radiation pattern with L1 lens covering the Wireless HD spectrum
(f = 57 GHz to f = 66 GHz): a) ϕϕϕϕ = 0º; b) ϕϕϕϕ = 90º.
When tilting the lens, Figure 3.11, the far field radiation pattern is identical for all frequencies,
validating the broadband lens premise, thus allowing the use of the entire Wireless HD frequency
band. The presented lens tilt angle corresponds to the maximum scanning angle, the worst possible
case.
Figure 3.11 – Far field radiation pattern with L1 lens for the Wireless HD spectrum
(f = 57 GHz to f = 66 GHz) for θθθθlens = 40º along the ϕϕϕϕ = 0º plane.
The undesired rays, which hit the surface outside the collimating region, contribute to the appearance
of an increasing left side lobe as the lens tilt increases. As will be seen ahead, this tends to pull the
maximum of the far field radiation pattern in the direction back to the feed axis, diminishing the lens
maximum scanning angle.

46
When comparing ILASH simulations with CST ones, one must take into account that ILASH
simulations just allow to consider reflections inside the lens with non tilted and on-axis feeds.
Considering this limitation, higher side lobe level is expected for CST simulations. On top of that,
elliptical lens presents a major difficulty when considering the GO/PO method, because geometrical
optics cannot cope with the rays spread when they reach the lens surface close to the critical angle of
incidence [34]. Figure 3.12 shows the incident angle at the outer lens surface accordingly with the
departing ray angle for the polyethylene elliptical lens.
Figure 3.12 – Incident angle at the outer lens surface in function of the departure angle from
the feed in relation to the lens axis.
At that point a surface wave is generated, originating a slightly more directive beam, while increasing
the side lobe level. It is seen in Figure 3.13 that the elliptical lens produces a lateral wave that results
from the fact that a high fraction of the horn’s radiation power is hitting the lens outer surface with an
incidence angle close to the interface critical angle, that corresponds to the total reflection condition
(presented angle corresponds to the polyethylene material):
� I �� = B () 7 �√��
9 = 40.7� (14)
Figure 3.13 – Near field for a lens tilt of θθθθlens = 20º.
0 20 40 60 80 1000
10
20
30
40
50
θ [º]
θi [º
]
θi
θc
θmax=49º

47
In Figure 3.13 it is possible to observe the surface wave travelling along the border of the lens and
mainly exiting the lens in the opposite direction. This effect is responsible for the high side lobe level
on the direction where the beam is tilted, representing a major disadvantage of the elliptical lens.
The obtained far-field radiation pattern for θlens = 0º at f = 62.5 GHz is presented in Figure 3.14. The
correspondent directivity is: CST, 22.33 dBi; ILASH, 22.26 dBi.
a) b)
Figure 3.14 – Radiation pattern for the non tilted L1 lens: a) ϕϕϕϕ = 0º; b) ϕϕϕϕ = 90º.
Simulations were performed with ILASH and CST software tools for different lens tilting angles along
the ϕ = 90º plane. Amplitude and phase results are presented, allowing a better comparison between
both software tools. Since reflections are not considered with ILASH, side lobe level and side lobe
phase are quite different from CST simulations, as it is shown from Figure 3.15 to Figure 3.18.
The radiation pattern for a lens tilt of θlens = 10º is presented in Figure 3.15. With CST the lens
radiation pattern presents a beam tilt of θbeam = 9º and a directivity of 22.09 dBi. With ILASH the beam
tilt is θbeam = 10º and the directivity is 22.08 dBi.
a) b)
Figure 3.15 – L1 lens radiation pattern for θθθθlens = 10º along ϕϕϕϕ = 90º: a) Amplitude; b) Phase.

48
The far field radiation pattern for the lens tilt of θlens = 20º is shown in Figure 3.16. The main beam tilt is
θbeam = 17.7º and the directivity is 21.16 dBi for CST, while for ILASH the beam tilt is θbeam = 19º and
the directivity is 21.52 dBi.
a) b)
Figure 3.16 – L1 lens radiation pattern for θθθθlens = 20º along ϕϕϕϕ = 90º: a) Amplitude; b) Phase.
Two more simulations were performed for a lens tilt of θlens = 30º and θlens = 40º. The corresponding
radiation patterns are presented in Figure 3.17 and Figure 3.18, respectively.
With CST, for θlens = 30º the maximum of radiation corresponds to θbeam = 26.3º while for θlens = 40º is
θbeam = 35.0º. The corresponding directivities are 20.37 dBi and 18.94 dBi, respectively. Using ILASH,
for θlens = 30º the radiation pattern tilt beam is θbeam = 28º and for θlens = 40º is θbeam = 37º. The
directivities are 20.43 dBi and 18.66 dBi.
The obtained radiation patterns for the five lens tilt positions have shown good agreement between
both software tools on the main beam; however, the beam tilt achieved with ILASH software tool does
not exactly corresponds to the one predicted with CST.
a) b)
Figure 3.17 – L1 lens radiation pattern for θθθθlens = 30º along ϕϕϕϕ = 90º: a) Amplitude; b) Phase.

49
a) b)
Figure 3.18 – L1 lens radiation pattern for θθθθlens = 40º along ϕϕϕϕ = 90º: a) Amplitude; b) Phase.
When just considering the ϕ = 90º plane, ILASH simulations predicted a more directive beam than
CST. However, ILASH simulations present higher side lobes for other planes, leading to a directivity
that closely follows the one obtained with CST.
By observing Table 3.1, one can see that Wireless HD standard requirement of 2 dB scanning loss
limit is only achieved till θbeam = 30º. This is due to the fact that the collimating region is only defined up
to θmax = 50º. The left side lobe is affected by the surface wave and the right side lobe by the radiation
power that is hitting the lens surface after the critical incidence angle, corresponding to the cylinder
shape, where the rays are no longer focused on the lens axis direction.
Table 3.1 – Performance parameters of L1 lens for ILASH and CST software tools.
Lens Tilt ILASH CST
θlens [º] θbeam [º] D [dBi] ∆D [dB] θbeam [º] D [dBi] ∆D [dB]
0º 0.0 22.27 0.0 0.0 22.33 0.0
10º 10.0 22.08 0.24 9.0 22.09 0.24
20º 19.0 21.52 0.75 17.7 21.16 1.17
30º 28.0 20.43 1.84 26.3 20.37 1.96
40º 37.0 18.66 3.61 35.0 18.94 3.39
As the lens tilt angle increases, the feed illumination gradually exceeds the defined maximum
scanning angle of the lens and so, part of the feed radiated power starts to build side lobes and
launches a surface wave along the lens outer interface, decreasing the beam directivity.

50
3.2. Solution with two refraction surfaces
The elliptical lens presents a reasonable performance for Wireless HD communication systems;
however, some limitations were shown. The difficulties encountered relied on the short collimating
area of the lens, not allowing a wide scanning angle. The objective of having a two refraction surfaces
lens is that a second degree of freedom will allow a maximization of the portion of the lens surface that
is able to collimate the feed’s radiation, increasing the lens θmax angle of incidence.
The two refraction surfaces lens formulation is based upon GO, with exiting rays from the outer
surface parallel to the lens axis. The lens geometry is presented in Figure 3.19.
T
F
2.35r
ε =
r(θ)
l(θ)
s(θ)
θ
γ(θ)
Figure 3.19 - Geometry for the design of two-refraction surface collimated beam lens
(extracted from [25]).
The inner surface, r (θ), is defined analytically using a Taylor series expansion in order to the angle
formed by the ray path departing from the feed (θ):
� �� = ∑ L�M�N: �� (15)
where Cc = F, C1 = 0 and C2...8 are the coefficients to optimize. C1 is null in order to impose ∂r/∂θ = 0 at
θ = 0º and so ensuring null refraction for the central ray. The outer shell can be defined by the angle
γ (θ) and the length of the rays l (θ). Using the Snell law condition at the inner shell interface leads to:
�� ��
�� = √�������� ���√�������� ����� � �� (16)
By imposing an electrical path length condition we get:
� + √��� = � �� + √��� �� + �� (17)
with
�� = � + � − � ��"# �� − � ��"# �$ ��� (18)

51
Since the inner shell profile is analytically defined by (15), the differential equation (16) can also be
determined analytically. F and T are input constants, defining the lens height, whereas r (θ) and γ (θ)
are unknown functions.
The optimization method consists on using the genetic algorithms (GA) formulation, where the C2…8
coefficients are generated as individuals on a larger population where a set of Cn parameters
corresponds to a unique solution of a lens. Setting the Cn coefficients defines the r (θ) function in (15)
so γ (θ) is calculated from (16) and then l (θ) is obtained from (17) and (18)(17). With r (θ), γ (θ) and l
(θ) the upper surface is defined. The above formulation is integrated on a GA optimization loop,
generating and testing different lens’ shapes, with the goal of maximizing θmax, as mentioned before.
Two constraints had to be added:
• r (θ) > 4.5 mm, to ensure that the horn edges never touch the lens surface when this is tilted;
• ray incidence angle at the upper lens interface must be below 95% of the critical angle.
The last constraint is included in order to minimize the excitation of a lateral wave along the lens upper
surface that tends to deflect part of the lens radiation away from the main beam direction reducing the
directivity. This occurs when ray’s incidence angles approach the total reflection condition (14).
The lens was designed with F = 5 mm and T = 20 mm to obtain a lens with similar size as the elliptical
one and identical directivity. The optimization process lead to:
� �� = 0.0274�M + 0.7683�Q + 0.4522�R + 0.2553�S + 0.3774�T + 0.7369�V + 0.7353�1 + 5 (19)
resulting in the lens profile presented in Figure 3.20.
a) b)
Figure 3.20 – L2 lens, ILASH model I: a) lens profile; b) lens surface.

52
Since the feed must be integrated into the lens when using ILASH configuration, a cylindrical air base
was added to the lens, down to 3 mm beneath the feed.
The maximum angle of collimation is for the present lens of 72º, Figure 3.21, wider than the 49º of the
elliptical lens. Since the lens does not surround the feed as it happened with the elliptical lens, it is
mechanically possible to tilt the lens for much wider angles.
Figure 3.21 – Ray tracing
3.2.1. L2 lens analysis with CST software
The L2 CST model is shown in Figure 3.22 and, comparing it with the L1 lens in Figure 3.6 is visible
that the L2 lens has a bigger radius than the L1 lens, although directivity is similar for both lenses. The
disadvantage of being a larger lens, since we are considering a movable lens, is fairly compensated
by the wider scanning angle accomplished by this lens.
Figure 3.22 – L2 CST model
θθθθmax=72º

53
When using a two refraction surface lens, a better behaviour is accomplished for the mechanical
scanning lens. The added constraint to avoid incidence angles close to the critical angle completely
eliminates the presence of a lateral wave. By comparing Figure 3.23 with Figure 3.12 it is visible that
the L2 lens incidence angles remain away from the critical angle for a wider scanning angle than the
L1 lens. In Figure 3.23 b) are represented the electromagnetic fields at a specific time, showing that in
opposition to the elliptical lens the lateral wave is not longer present, favouring a better beam steering
performance, with lower side lobes.
a)
b)
Figure 3.23 – a) Incident angle at the outer lens surface in function of the departure angle from
the feed in relation to the lens’ axis; b) near field for a lens tilt of θθθθbeam = 20º.
The parameter |s11| was calculated for six lens tilt angles, from θlens = 0º to θlens = 50º along the ϕ = 0º
and ϕ = 90º planes. For the non-tilted position of the lens, the reflections on the inner interface are
highly responsible for a weaker matching of the lens, as seen in Figure 3.24. By tilting the lens, the
matching improves significantly, since the reflections on the inner interface are deviated from the horn
aperture. For both ϕ = 0º and ϕ = 90º planes the input reflection coefficient is maintained under -10
dB, showing a fairly good matching of the antenna for the entire Wireless HD spectrum.
0 20 40 60 80 1000
10
20
30
40
50
θ [º]
θi [º
]
θi
θc

54
a)
b)
Figure 3.24 - Input reflection coefficient amplitude with L2 lens for tilting lens angles from
θθθθlens = 0º to 50º along: a) ϕϕϕϕ = 0º; b) ϕϕϕϕ = 90º.
The scanning performance of the lens is shown in Figure 3.25 when tilting it on planes ϕ = 0º and
ϕ = 90º. The lens presents a reasonably stable directivity (above 20 dBi) for the scanning angles
interval (from θlens = 0º to θlens = 50º), when tilting the beam on both mentioned planes of the horn. CST
simulations show a reasonable good result for a beam rotation of 360º in azimuth and a beam tilt of
θbeam = 50º in relation to the feed axis. The L2 lens shows a great improvement in relation to the L1
lens, having a lower scan loss and wider scanning angle amplitude. Exact performance values will be
presented ahead in Table 3.2.

55
a)
b)
Figure 3.25 – Far field radiation pattern with L2 lens for tilting lens angles from
θθθθlens = 0º to 50º along: a) ϕϕϕϕ = 0º; b) ϕϕϕϕ = 90º.

56
3.2.2. L2 lens analysis with ILASH software
Previous analyses of the L2 lens were run on the CST software tool. When evaluating the lens
antennas with CST, the structure dimensions in terms of wavelength are too big and so each
simulation becomes very time consuming. A faster software tool would be ILASH, although, as
showed before, the results are not as accurate as the CST ones when analyzing a lens antenna with
the feed outside the lens. However, in this case, since the lens is rotated accordingly with the feed
position, the spherical double shell lens at the lens base can be quite appropriate to overcome the
need of an integrated feed when using ILASH. The previously adapted solution in Figure 3.20,
consisted on having a cylindrical base, however, this approach is just valid on the interval θ = -72º to θ
= 72º, that corresponds to the original L2 lens. Instead of using a cylindrical base, a more suited shape
would be the spherical one, because for this case the wave coming from the feed that hits the lens
base suffers no deviation and for an outer shell with very low thickness the amplitude and phase
remains reasonably constant.
The spherical double shell lens consists on an inner air shell covered by a λ/10 thickness polystyrene
shell. The feed radiation direction suffers no relevant change; however, the amplitude is lowered due
to the interface reflection. The spherical lens is intended to simulate the absence of a lens interface,
which means that when evaluating its performance it is expected that the radiation pattern closely
approximates the one from the feed and that the radiation power is similar for both cases. As seen in
Figure 3.26 b), the radiation pattern suffers no significant change, while efficiency decreases to 94.5%.
The slight efficiency change is due to the outer interface, because even being a thin layer the reflected
power is large enough to influence a decay of 5.5% on the radiated power of the lens.
a) b)
Figure 3.26 – Spherical double shell lens: a) lens surface; b) radiation pattern compared to feed
radiation pattern (single mode feed)

57
The spherical lens is then added to the L2 lens, in a way that the lens profile is reasonably continuous
on the intersection point of the two lenses. The small differences described before will not influence
significantly the new lens model performance on ILASH when compared to the CST initial model.
To improve ILASH results accuracy the L2 lens shape was modified as stated before. The Figure 3.27
shows the ILASH model used. With this configuration, when tilting the lens in relation to the feed
position (with ILASH the feed is tilted instead), the lens base remains always spherical. Accordingly
with this and what was shown on the previous section the results obtained with ILASH for several lens
tilting positions are expected to closely approximate the CST ones.
One can see from the input reflection coefficient of the lens, shown in Figure 3.24, that for the non-
tilted case of the lens, the reflection on the inner interface represents an important factor that must be
consider when performing the ILASH L2 lens analysis. Although the outer shell of the spherical lens
has no significant interference on the overall performance of the lens, when considering internal
reflections, the reflected rays on the interface between the two shells will influence negatively the
radiation pattern on the opposite direction of those incident rays.
a) b)
Figure 3.27 – L2 lens, ILASH model with spherical base: a) lens profile; b) lens surface, inner
shell (blue) – air, outer shell (green) – polystyrene
The following two sections present simulated results of the modified L2 lens for non-tilted and tilted
positions of the lens (feed tilt when considering ILASH tool). The two cases are considered separately
because for the non-tilted case internal reflections can and must be taken into account when
evaluating the lens performance.

58
ILASH software tool, described in [35], was updated by the author in order to include the possibility of
tilting the feed. Considering the lack of time and the complexity of the kernel code associated with the
lens analysis, internal reflections can just be considered for the non-tilted feed case. In this way, just
for not-tilted cases is possible to consider the influence of internal reflections while evaluating the lens
performance. In Figure 3.28 the surface currents of the L2 lens are presented, considering no
reflections and 1st order reflections. At the top of the lens there are no significant differences, however,
the lens base is being more illuminated when reflections are included.
a) b)
Figure 3.28 – Surface currents - front view: a) no reflections; b) 1st
order reflections.
Figure 3.29 shows a better perspective of the lens base. The lens surface currents when considering
no reflections are presented in Figure 3.29a), distinctively showing the spherical lens base. With minor
differences, one can consider that the surface currents at the lens base approximately resemble the
feed far field radiation pattern, see Figure 2.22. When considering internal reflections, one can see
that there is a strong back radiation into the feed when taking reflections into consideration. Part of the
reflected rays should be obstructed by the horn antenna, but ILASH does not considerers the feed
presence. On the surrounding area of θ = 180º there is a maximum on the lens surface currents when
reflections are included, Figure 3.29 b) and c), demonstrating the behaviour it was expected from CST
simulations of the input reflection coefficient for the non-tilted position. On the horn ϕ = 0º plane, x-axis
plane, the lens base surface is illuminated on a slightly similar way for the three cases, but on the
other hand, in the ϕ = 90º plane the illumination with no reflections included is much weaker than for
the cases where reflections are considered, due to the feed radiation pattern asymmetric behaviour in
both planes. This relevant discrepancy will reflect on the far field radiation pattern as well, as will be
seen ahead. When considering internal reflections with this lens model, one must be very careful
when evaluating the results. Even with just 1st order reflections, the spherical lens base has a negative
impact on the lens radiation pattern; because the intended ‘neutral’ effect of the sphere is just
achieved for the rays departing from the feed (the sphere centre) and therefore, any reflected ray
returning from the lens surface is erroneously changed by the spherical lens base.

59
a)
b) c)
Figure 3.29 – Surface currents - base view: a) no reflections; b) 1st
order reflections;
c) 2nd
order reflections
After the considerations made earlier, it is important to notice that the far field radiation patterns
obtained with ILASH correspond to a variation of the CST lens model and so, both applications cannot
be compared on base of these results in terms of accuracy. The lens models are different and what
was intended was to obtain an ILASH lens model that fairly approximates the lens behaviour when the
feed is placed outside the lens.
The far field radiation pattern of the lens (ILASH simulation) is shown in Figure 3.30, superimposed on
the previous CST simulation for both ϕ = 0º and ϕ = 90º planes. The lens simulations in ILASH
consisted on a first step by neglecting internal reflections and in a second one by including 1st order
reflections. When comparing to the CST results, for ϕ = 90º, Figure 3.30 b), a big improvement on the
side lobe level is achieved by including internal reflections. The low side lobe level of the far field
radiation pattern when neglecting internal reflections is due to the fact that the reflected rays on the
inner interface are not considered on the surface currents and therefore on the radiation pattern. For
ϕ = 0º is not so heavily affected by the internal reflections because, as seen in Figure 2.22, the far field
radiation pattern of the feed presents a much higher side lobe level on that plane that for ϕ = 90º.

60
a)
b)
Figure 3.30 - Radiation pattern for the non-tilted feed (lens) configuration with 1st
order
reflections: a) ϕϕϕϕ = 0º; b) ϕϕϕϕ = 90º.
The inclusion of 2nd order reflections presents a problem for this specific lens model, since the
reflected rays on the spherical base, which should have no interference in the rays’ trajectory, are
going to hit the lens surface on the opposite direction of the rays’ incidence. Figure 3.31 shows the
comparison between simulations without reflections and with 2nd order reflections. Although the far
field radiation pattern presents a similar side lobe level for both CST and ILASH simulations, a
stronger ripple on the secondary lobes in ILASH analysis indicates that the spherical lens base is
erroneously adding reflected rays with relative high power to the lens surface currents, negatively
influencing the radiation pattern.

61
a)
b)
Figure 3.31 - Radiation pattern for the non-tilted feed (lens) configuration with 2nd
order
reflections: a) ϕϕϕϕ = 0º; b) ϕϕϕϕ = 90º.
When observing the phase of the radiation pattern of the lens, Figure 3.32 and Figure 3.33, it is
perfectly visible that ILASH and CST simulations agree quite well till θ approximately equal to 70º, the
maximum angle of incidence of the original lens. The radiation pattern phase confirms what was
stated before, showing a more unstable phase behaviour when 2nd order reflections are considered.
The present study, considering the influence of internal reflections on the accuracy of the lens analysis
also demonstrates that the directivity of the lens output is slightly affected by the reflections at the
inner interface, which are due to the relative large difference of permittivity between the environment
(air) and the lens material (polyethylene). Considering no reflections the radiation pattern directivity is
23dBi, while for 1st and 2nd order reflections the directivity is 22.6dBi and 21.9dBi, respectively.

62
a)
b)
Figure 3.32 - Radiation pattern phase for the non-tilted feed (lens) configuration with 1st
order
reflections: a) ϕϕϕϕ = 0º; b) ϕϕϕϕ = 90º.
a)

63
b)
Figure 3.33 - Radiation pattern phase for the non-tilted feed (lens) configuration with 2nd
order
reflections: a) ϕϕϕϕ = 0º; b) ϕϕϕϕ = 90º.
With ILASH, when using a tilted feed, the internal reflections are not considered for the lens surface
currents calculations. In the direction of the feed main beam it presents a reasonable accuracy, being
the effect of reflections negligible. The feed is tilted in the ϕ = 90º plane, in order to compare with the
lens tilt on CST. Figure 3.34 shows that the spherical double shell lens is strongly illuminated when the
feed is tilted near θfeed = 40º or above. Tilting the feed radiation pattern leads to a new relative
maximum on the base of the lens, corresponding to the feed main beam amplitude, Figure 3.34 b).
a) b)
Figure 3.34 – Surface currents – tilted feed on the ϕϕϕϕ = 90º plane: a) θθθθfeed = 10º; b) θθθθfeed = 40º.
The far field radiation pattern is collimated on the direction of the lens axis, what in the case of tilting
just the feed leads to have the radiation pattern main beam at the origin position. In order to compare
these results with the CST ones, the ILASH far field radiation patterns are shifted by the
corresponding lens tilt angle θlens.

64
Tilting the feed leads to a big portion of feed radiated power to pass outside the lens, being this energy
accounted by using the spherical double shell lens. This solution showed to be relatively accurate as
seen before and if internal reflections could be used for tilted feeds, the ILASH simulation results
would probably be more precise. By observing Figure 3.35 to Figure 3.39 one can see that ILASH
simulations are in good agreement with the CST ones in amplitude and in phase as well, when
considering just the main lobe and the right side lobe. The not so good agreement on the left side is
due to the not accounted internal reflections when tilting the feed to the right. On the direction of the
feed main beam the phase is accurately calculated, being the discrepancies found where the feed
radiation pattern amplitude is below -30 dB, when the power associated with internal reflections is of
the same order or even higher. By tilting the lens or the feed a second lobe grows accordingly with the
tilted angle, corresponding to an increase of power that is avoiding the lens surface along the
propagation path. Although the right and left side lobes have similar amplitude, as mentioned before,
the left lobe is due to reflections on the lens inner interface.
a b)
Figure 3.35 – Radiation pattern for the θθθθlens = -10º lens configuration along the ϕϕϕϕ = 90º plane:
a) Amplitude; b) Phase.
a) b)
Figure 3.36 – Radiation pattern for the θθθθlens = -20º lens configuration along the ϕϕϕϕ = 90º plane:
a) Amplitude; b) Phase.

65
a) b)
Figure 3.37 – Radiation pattern for the θθθθlens = -30º lens configuration along the ϕϕϕϕ = 90º plane:
a) Amplitude; b) Phase.
a) b)
Figure 3.38 – Radiation pattern for the θθθθlens = -40º lens configuration along the ϕϕϕϕ = 90º plane:
a) Amplitude; b) Phase.
a) b)
Figure 3.39 – Radiation pattern for the θθθθlens = -50º lens configuration along the ϕϕϕϕ = 90º plane:
a) Amplitude; b) Phase.

66
In Table 3.2 is presented the performance parameters of the L2 lens for ILASH (without reflections)
and CST software tools. By observing the results it is seen that both tools present close predictions of
the lens behaviour. The directivity is higher with ILASH because the power from the reflected rays is
not considered on the lens surface currents calculation, which results on a low side lobe level of the
far field radiation pattern. With ILASH a less accurate result is determined when compared to CST
simulations, however, as a first prediction of the lens behaviour and since it just takes a few minutes to
analyse it, ILASH tool can be considered a helpful and powerful tool, enabling to obtain several
performance indicators of the lens in a very short time. Each simulation of the studied lens on CST
takes about 1 to 2.5 hours to compute on the same pc as the ILASH takes 6 minutes.
Table 3.2 – Performance parameters of L2 lens for ILASH and CST software tools.
Lens Tilt ILASH CST
θlens [º] θbeam [º] D [dBi] ∆D [dB] θbeam [º] D [dBi] ∆D [dB]
0 0.0 23 0 0.0 21.5 0.31
10 9.68 22.81 0.19 8.7 21.69 0.12
20 19.2 22.45 0.55 18.2 21.81 0.0
30 28.72 21.89 1.11 26.9 21.4 0.41
40 38 21.12 1.88 36.5 20.61 1.2
50 47 20.04 2.96 45.5 19.65 2.16
The directivity variation (using CST tool) is reasonably small inside the tilting interval of θ = -50º to
θ = 50º, around 2 dB, inside the scan loss allowed on the Wireless HD requirements. Gain is showed
in Figure 3.40 for the entire spectrum of the Wireless HD communication system (from f = 57 GHz to
f = 66 GHz). With a close to 1 dB gain variation over the entire bandwidth it is shown that L2 lens is a
reasonably good scanning and broadband lens, especially tailored for the Wireless HD standard.
Figure 3.40 - Gain variation of the L2 lens versus tilt angle computed for three frequencies
within the Wireless HD band.

67
4. Mm-wave antennas measurements
This chapter presents all relevant information of the shaped dielectric lenses’ tests. Concerning the
manufacturing process, the adopted lens fabrication technique for this case, a single material lens,
corresponds to the machining technique using a CNC milling machine. All procedures are fully
described in [30]. Being a single shell lens with the feed not integrated at the lens base, its fabrication
process is quite simple and it represents a low-cost solution if molding technique is used. The two
main sections ahead include a description of the measurement facilities and further analysis of the
lenses’ prototypes measurements.
4.1. Measurement facility description
Antenna radiation pattern measurements are performed in a 4.1 m × 2.4 m × 2.1 m millimetre wave
anechoic chamber, Figure 4.1. The measurement process, data acquisition, manipulation and
visualization are controlled by a software application, [36], developed by former IST students and now
updated by the author. Azimuth rotation of the antenna under test was driven by an ORBIT AL-360
positioner, while antenna roll axis and probe polarization were manually controlled. As part of the
project, it was necessary to modify the software tool in order to remotely control all the measurements
procedures, incrementing the laboratory measuring capabilities.
Figure 4.1 – Mm-wave anechoic chamber.
The software application that controls the anechoic chamber measurements was updated in terms of
making it more user-friendly and especially to enable it to remotely control the antenna roll axis and
probe polarization using ORBIT AL-060 positioners. The automation of lens and probe rotation
represents a higher step when considering measurements accuracy. It also allows running several
measurements without user interference, decreasing possible user error and releasing him from
repetitive tasks.

68
In Figure 4.2 a) are presented all available devices. Three devices were added to the previous list: the
Agilent PNA Series Network Analyzer and the two ORBIT AL-060 positioners. The PNA Series
Network Analyzer from Agilent is used as a frequency synthesizer device and as a field measuring
device. It enables measuring the radiation pattern amplitude and phase and is especially used for
polarization measuring. The two ORBIT AL-060 positioners, together with the AL-360 positioner
already installed, are responsible for allowing a complete automation of the antennas measurements.
The software application allows the user to attribute any desired rotation axis to each positioner, see
Figure 4.2 b), among the three presented: antenna azimuth, antenna polarization and probe
polarization. In this way, no manual intervention is needed from the user when measuring the antenna
radiation pattern for several antenna and probe positions.
a) b)
Figure 4.2 – Devices: a) Initialization; b) Selection.
The user-friendly interface is now more intuitive and easier to use. Along with the minor changes
introduced, to correct small errors or to improve the application performance, the application flow chart
was strongly modified. Four main sections were created taking advantage of the past software
structure: Radiation, Polarization, Post-processing and Devices. Among those, just the
Post-processing interface stays unchanged; however, this interface is now available at any time,
enabling the user to view and manipulate old curves without having to perform any measuring or even
to initialize any device. In the previous version, stages were sequential and a certain order of events

69
had to be followed. As seen in Figure 4.2 a), each device must be initialized prior to use. The
procedure of initialization is now slightly different, giving the user total control over all available
devices. At any time the devices can be changed, reinitialized with different parameters and even
selected for other functions when considering the axis measuring devices.
The field measuring window for azimuth rotation of the lens is shown in Figure 4.3. Taking advantage
of the introduced PNA Series Network Analyzer, both amplitude and phase can be measured. It is also
important to mention that with this device the frequency used can go till f = 110 GHz. The polarization
window includes a new functionality, which allows one to perform a frequency sweep for specific
antenna and probe orientations, taking advantage of the former routines used for polarization
measurements.
Figure 4.3 – Field measuring window.
Although the software has been updated with all the mentioned fixtures and particularly with the two
ORBIT AL-060 positioners, the anechoic chamber just has the ORBIT AL-360 fully functional. The
installation of both positioners is waiting for a free time window of measurements, after which the
anechoic chamber measurements will be entirely remotely controlled.

70
4.2. Antennas’ prototypes and measurements
This section includes all manufactured prototypes and respective measurements. The designed
lenses are intended to work on a Wireless HD communication system or a similar service. As shown in
Figure 4.4, the lens must pivots over the horn in a way that the radiation beam is tilted accordingly with
the lens movement. The lens can perform an elevation and an azimuth scanning, depending on the
lens axis rotation. By properly rotating and tilting the lens, the radiation beam is collimated on a
specific direction, since the rays that exit the outer lens interface are always parallel to the lens axis.
The manufactured lens geometries were described in section 3. Measurements will confirm that the
lenses performance closely fulfil the Wireless HD requirements.
a) b)
Figure 4.4 – Geometry of the horn plus lens antenna: a) non-tilted lens; b) tilted lens
(based on [14]).
For test purposes, a prototype of the mechanical scanning lens concept was designed, being the lens
tilt manually controlled. Out of the project scope is the antenna automatic rotation mechanism, which
is currently being studied in a parallel project. A drawing of the lens concept is presented in Figure 4.5,
where the stationary horn is placed in a way it radiates to the movable lens. The lens tilting axis,
passes along the horn phase centre, and this axis is defined by pivots in the two lens extensions that
support the lens. The structure formed by the lens and the arms can rotate azimuthally around the
horn, making it possible to test the lens performance over the entire 360º azimuth scanning space.
The geometry adopted, together with the lens characteristics make this antenna a low-cost and
efficient solution for slower tracking situations, like Wireless HD or HAPs services. The presented
mechanical scanning lens structure and concept are the subject of the patents requests [14] and [37],
pending for approval.

71
Figure 4.5 – Structure of the mechanical scanning lens (taken from [14]).
The horn antenna that feeds the movable lens, previously described in 2.2.2, was manufactured in
aluminium with 7.8 mm inner aperture diameter, 10 mm flared length and 3.9 mm diameter circular
waveguide port, Figure 4.6.
Figure 4.6 – Manufactured circular horn feed.
The horn is fed in the TE11 mode with right-hand circular polarization. The measured radiation pattern
of the standalone circular horn at f = 62.5 GHz is represented in Figure 4.7, superimposed on the CST
simulations. A general good agreement is shown between measurements and simulations, both for
co- and cross-polarization. When comparing the lens performance indicators obtained by measuring
and simulation, a strong similarity is found. The measured gain is 13.6 dBi, close to the 13.7 dBi gain
predicted by CST and the input reflection coefficient |s11| is always below -20 dB for both simulated
and measured cases, as shown in Figure 4.8. The discrepancy between simulations and
measurements is due to the inclusion of the polarization device at the feed that slightly influences the
reflection coefficient.

72
Figure 4.7 - Measured and simulated co- and cross-polar radiation pattern of the standalone
conical horn at 62.5 GHz.
Figure 4.8 - Measured amplitude input reflection coefficient of the horn antenna superimposed
on CST simulations.
As mentioned before, the selected material for lenses fabrication was polyethylene. The permittivity
and loss tangent values were measured at f = 62.5 GHz using the Fabry Perot open resonator
method. Description of the method is found at [30]. Two lenses were manufactured: the elliptical dome
lens and the solution with two refraction surfaces, respectively L1 and L2.
4.2.1. Steerable elliptical dome lens
The manufactured lens weights just 5 g, making it easy to tilt and rotate. The manufactured
mechanical scanning lens prototype is shown in Figure 4.9, with the L1 lens included. With this lens no
additional lens’ extensions were needed, since the lens rotation axis is inside the spherical cavity. A
compass was added at the lab test set-up for easy reading of the manually adjusted lens tilt angles.

73
Figure 4.9 - Manufactured L1 lens and feeding horn, assembled in a lab test set-up.
The measured input reflection coefficient |s11| at the horn port is shown in Figure 4.10 for the entire
Wireless HD spectrum. Different tilt angles were tested and the results were superimposed on the
standalone horn measurements. The lens spherical cavity reflects part of the radiation into the horn,
as |s11| parameter increases with the inclusion of the lens. Although there is a |s11| increase for the
entire bandwidth of Wireless HD, it remains always below an acceptable -10 dB level, as predicted
with CST, Figure 3.7. The lens performance is very similar for different tilt angles, explained by the
spherical shape of the inner cavity.
Figure 4.10 – Measured amplitude input reflection coefficient of the horn antenna when placed
in the centre of the spherical air cavity of the L1 lens.
The lens far field radiation pattern were measured for different tilt angles in the interval θlens = 0º to
θlens = 40º (the lens maximum scanning angle) with f = 62.5 GHZ. In Figure 4.11 are shown the co-
and cross-polarization results, presenting a gain of 21.6 dBi for the non-tilted position of the lens and
gradually decreasing for higher lens tilts. The radiation beam is also heavily deformed when increasing
the lens tilt. The cross-polarization level in the main beam direction is always below -15 dB for all lens
tilts measured, indicating that the lens preserves the circular polarization of the circular horn and that
the reflected wave at the spherical cavity does not interfere much with the horn’s radiation pattern and
polarization.

74
The measured results are superimposed on the CST simulations and the agreement between them is
remarkable, both for co- and cross-polarization.
Figure 4.11 - Measured and simulated radiation patterns of the L1 lens antenna at f =62.5 GHz
for θθθθlens = 0º to θθθθlens = -40º along ϕϕϕϕ = 90º.
To summarize the lens behaviour, lens performance indicators were obtained from the measured
results for different tilt angles and presented in Table 4.1. The main beam direction (θbeam), presents
an increasing difference in relation to the lens tilt angle (θlens), diminishing the maximum scanning
angle to near ±25º if considering a 2 dB scan loss gain as the limit, with radiation efficiency always
above 96%.
Table 4.1 - Measured performance of the L1 lens at f = 62.5 GHz. ∆∆∆∆G is the gain scan loss, XPol
is the higher cross polarization level in the main beam full width at -10 dB and ηηηη is the CST
simulated radiation efficiency.
L1 Lens
θlens [º] θbeam [º] G [dBi] ∆G [dB] XPol [dB] η (%)
0 0.0 21.6 0.2 -18.5 96.1
10 8.9 21.8 0.0 -18.5 96.6
20 17.3 20.9 0.9 -17.6 96.7
30 25.6 19.7 2.1 -16.4 97.0
40 32.5 19.1 2.7 -14.9 97.5

75
4.2.2. Solution with two refraction surfaces
The second lens, called L2, was manufactured and placed at the lab test set-up the same way as L1,
Figure 4.12. It weights 8 g, slightly larger than the previous one. In this case the lens tilting axis lies
outside the lens volume, so two lateral extensions of the same material had to be added to provide
fixing points for lens tilting. The presence of these extensions hardly affects the lens radiation pattern
because they are not illuminated by the horn main lobe.
Figure 4.12 - Manufactured L2 lens plus horn feed.
The measured return loss |s11| at the circular horn input port is shown in Figure 4.13. For non-tilted
position, the lens behaviour is similar to the elliptical dome lens, with |s11| slightly below -10 dB,
however, by increasing the lens tilt the input reflection coefficient |s11| decreases significantly. Since
the inner interface is no longer spherical and is more close to a flat surface, the slight reflected wave
at the bottom of the lens is deflected away from the horn aperture.
Figure 4.13 – Measured amplitude input reflection coefficient of the horn antenna when placed
in the centre of the spherical air cavity of the L1 lens.

76
The measured radiation pattern of the L2 lens, for f = 62.5 GHz, is shown in Figure 4.14. Both co- and
cross-polarization radiation patterns are presented for tilt angles from θlens = 0º to θlens = 50º, with steps
of 10º. The improvement from the elliptical lens is quite remarkable. The L2 lens presents
considerable lower scanning loss gain than the L1 lens and also presents a much better defined main
beam up to the maximum scan angle of 45º. The marginal beam deformation with tilt angle is not
critical for the Wireless HD application. The measured results are superimposed on the CST prediction
and the agreement is excellent for both co- and cross-polarization.
Figure 4.14 - Measured and simulated radiation patterns of the L2 lens antenna at f =62.5 GHz
for θθθθlens = 0º to θθθθlens = 50º.
The CST accuracy proven against measurements validates the simulation model and the previous
showed analysis for other frequencies in the Wireless HD band.
The performance indicator values of the L2 lens, obtained through measurements, are presented in
Table 4.2. The measured gain is very stable along all tilted angles, with 21.7 dBi for the non-tilted
position. The maximum beam steering angle corresponds to θbeam = 45º, with just a 1.1 dB of beam
steering loss, much better than the L1 lens. As to radiation efficiency and cross-polarization the
performance is similar to the L1 one, with efficiency above 95% and a considerably low cross-
polarization always below -16 dB for all lens tilt angles.
The Wireless HD standard defines the lens elevation beam steering till ±40º, being fully achieved by
the presented antenna, however, considering the 2 dB margin established, a wider beam tilt can be
accomplished beyond the θbeam = ±45º.

77
Table 4.2 - Measured performance indicator values of the L2 lens at f = 62.5 GHz. ∆∆∆∆G is the scan
loss value, XPol is the higher cross polarization level in the main beam full width at -10 dB and
ηηηη is the CST simulated radiation efficiency.
L2 Lens
θlens [º] θbeam [º] G [dBi] ∆G [dB] XPol [dB] η (%)
0 0.0 21.7 0.0 -17.3 95.3
10 9.7 21.7 0.0 -16.2 95.5
20 19.5 21.7 0.0 -16.5 95.4
30 27.9 21.7 0.0 -16.5 95.8
40 36.4 21.2 0.5 -16.4 96.0
50 44.8 20.6 1.1 -16.5 97.0
The results showed for this particular lens, demonstrate the antenna remarkable performance when
considering its scanning attributes. The mechanical beam steering lens fulfils with all the Wireless HD
requirements, making it a viable and adequate solution for such communication service. The
mechanical steerable lens prototype showed very good results, close to what was expected from CST
simulations, proving the mechanical beam steerable antenna concept.

78

79
5. Conclusions
A new steerable beam antenna concept was developed and proved against Wireless HD
requirements, being the same design principles valid for different applications, such as the HAPs
system. The presented solution, making use of a collimating lens, corresponds to a totally new
scanning concept, although collimating lenses are widely used for scanning purposes. The beam
steering is obtained by pivoting an appropriately shaped dielectric lens in front of a single fixed feed,
instead of the regular matrix of feeds located at a fixed lens. The proposed mechanical beam steering
antenna is simple, compact and it represents a low-cost solution for large scale production.
When considering the optimization of a double refraction surfaces lens, the lens performance greatly
improves when comparing it to an elliptical lens, mainly due to the extra degree of freedom. The
fabricated mechanical steerable lens prototype fully complies with the Wireless HD requirements,
demonstrating a ±45º elevation scan capability over full azimuth with gain scan loss lower than 1.1 dB
and radiation efficiency above 95% for the entire spectrum of the referred standard (from f = 57 GHz
to f = 66 GHz). The lens weights only 8 g, which for mechanical steering is a critical quality.
In order to adjust the presented lens antenna to a different application, namely the HAPs, the new lens
would be designed for HAPs system in the Urban Area Coverage, with a scanning angle of
θbeam = ±60º. The polyethylene lens was specifically designed for the Wireless HD standard, but higher
beam tilt angles can be achieved by using materials with higher permittivity. For the change in the
operating frequency and associated gain a scaling of the complete solution would almost be enough to
comply with the HAPs requirements.
Complete antenna analysis were performed with CST, however, a full performance comparison was
made with ILASH tool, since lens antenna simulations are much faster when using ILASH. Its
performance and accuracy were already massively tested and studied when considering integrated
feeds at the lens base; however, for the particular case where the feed is placed outside the lens,
some adjustments had to be considered. By changing the lens profile accordingly with specific rules,
the overall results closely approach the CST ones. ILASH proved to be a relative accurate and reliable
software tool for lens design and as a first lens performance indicator.
The software application that is required for the measurement process, data acquisition, manipulation
and visualization used with the millimetre wave anechoic chamber was improved in terms of its
structure and organization, making it more flexible and easier to use. Its user-friendly interface
suffered some changes; however, the most important additions were the two ORBIT AL-060
positioners and the PNA Series Network Analyzer from Agilent. The inclusion of the positioners made
the antenna and probe rotation a completely remote control system, enhancing the laboratory
capabilities. On the other hand, the PNA Series Network Analyzer allows performing antenna analysis
over a wider range of frequencies, till f = 110 GHz.

80

81
6. References
[1] Jong-Hoon Lee; Kidera, N.; Pinel, S.; Laskar, J.; Tentzeris, M. M.; “60 GHz High-Gain
Aperture-Coupled Microstrip Antennas using Soft-Surface and Stacked Cavity on LTCC
multilayer technology”, IEEE Antennas and Propagation Society International Symposium, pp.
1621–1624, July 2006.
[2] Hiroki Tanaka and Takashi Ohira, “Beam-Steerable Planar Array Antennas Using Varactor
Diodes for 60-GHz-Band Applications”, European Microwave Conf., Munich, 2003.
[3] Abbas Abbaspour-Tamijani, Kamal Sarabandi, “An Affordable Millimeter-Wave Beam-
Steerable Antenna Using Interleaved Planar Subarrays”, IEEE Trans. on Antennas and
Propagation, vol. 51, no. 9, Sept. 2003.
[4] A. Tombak and A. Mortazawi, “A Novel Low-Cost Beam-Steering Technique Based on the
Extended-Resonance Power-Dividing Method”, IEEE Trans. Microwave Theory Tech., vol. 52,
no. 2, pp. 664-669, Feb. 2004.
[5] K. Van Caekenberghe, T. Vaha-Heikkila, G. Rebeiz and K. Sarabandi, “Ka-Band MEMS TTD
passive electronically scanned array (ESA)”, IEEE Antennas and Propagation Society
International Symposium, pp. 513-516, July 2006.
[6] Kai Chang, Ming-yi Li, Tae-Yeoul Yun, Christopher T. Rodenbeck, “Novel Low-Cost Beam-
Steering Techniques”, IEEE Trans. on Antennas and Propagation, vol. 50, no. 5, May 2002.
[7] Donald H. Kuhn, “Dual Lens Antenna with Mechanical and Electrical Beam Scanning”, United
States Patent, US 4.642.651, Feb. 1987.
[8] Archer David Munger, “Scanning Array Antenna using Rotating Plates and Method of
Operation Therefor”, United States Patent, US 5.945.946, Aug. 1999.
[9] Zimmerman, K. A.; Wann, J. E.; Freeman, R. A.; Black, D. N.; Marsik, J. C.; “Scanning
Directional Antenna with Lens and Reflector Assembly”, United States Patent, US 6.396.448,
May 2002.
[10] Gary M. Hamman, Douglas W. Taylor, “Surveillance Radar Scanning Antenna Requiring no
Rotary Joint”, United States Patent, US 6.556.174 B1, Apr. 2003.
[11] Dean Alan Paschen, Kiersten Carinne Kerby, “Low-Profile Lens Method and Apparatus for
Mechanical Steering of Aperture Antennas”, United States Patent Application Publication, US
2007/0285327 A1, Dec. 2007.
[12] http://www.wirelesshd.org “WirelessHD Specification Version 1.0 Overview”, Oct. 2007.
[13] Robert C. Daniels and Robert W. Heath, Jr., “60 GHz Wireless Communications: Emerging
Requirements and Design Recommendations”, IEEE Vehicular Technology Magazine, pp. 41-
50, Sept. 2007.

82
[14] J. Costa, C. Fernandes, E. Lima, “Antena compacta com orientação mecânica do feixe de
radiação, para seguimento de terminais móveis em comunicações sem fios”, Portuguese
Patent, PT 104108, Patent pending, Jun. 2008.
[15] Stylianos Karapantazis and Fotini-Niovi Pavlidou, “The Role of High Altitude Platforms in
Beyond 3G Networks”, IEEE Wireless Communications, pp. 33-41, Dec. 2005.
[16] J. Thornton, D. Grace, C. Spillard, T. Konefal and T. C. Tozer, “Broadband Communications
from a High-Altitude Platform: the European Helinet Programme”, Electronics &
Communication Engineering Journal, June 2001.
[17] Zain Elabdin Omer Elshaikh, Md. Rafiqul Islam, Ahmad Faris Ismail and Othman O. Khalifa,
“High Altitude Platform for Wireless Communications and Other Services”, Intern. Conf. on
Electrical and Computer Engineering, ICECE 2006, Dhaka, Bangladesh, pp. 432-438, Dec.
2006.
[18] Recommendation ITU-R F.1500, “Preferred Characteristics of Systems in the Fixed Service
Using High Altitude Platforms Operating in the Bands 47.2-47.5 GHz and 47.9-48.2 GHz”,
2000.
[19] Kandus, G.; Svigelj, A.; Mohorcic, M.; “Telecommunication Network Over High Altitude
Platforms”, Intern. Conf. on Telecommunications in Modern Satellite, Cable and Broadcasting
Services, vol. 2, pp. 344-347, Sept. 2005.
[20] Pawlowski, W., “Radio Wave Propagation Effects in High-Altitude Platforms Systems”, Intern.
Conf. on Microwaves, Radar and Wireless Communications, MIKON-2000, vol. 1, pp. 185-
188, May 2000.
[21] Bon-Jun Ku, Yang-Su Kim, Byung-Su Kang, Do-Seob Ahn, A. S. Belyaev, Ye. N. Egorov, N.
V. Vladimirov, S. A. Ganin, A. C. Reutov, Yu. A. Suserov, A. M. Shitikov, A. V. Shislov, A. G.
Shubov, “Multi-Faced and Multibeam DBF Antenna for High Altitude Platform Station Stages
of Antenna Development”, Intern. Conf. on Antenna Theory and Techniques, Sevastopol,
Ukraine, pp. 87-90, Sept. 2003.
[22] Recommendation ITU-R F.1843, “Methodology for Determining the Power Level for High
Altitude Platform Stations Ground Terminals to Facilitate Sharing with Space Station
Receivers in the Bands 47.2-47.5 GHz and 47.9-48.2 GHz”, 2007.
[23] E. Lima, J. Costa, M. Silveirinha, and C. Fernandes, “ILASH – Software Tool for the Design of
Integrated Lens Antennas”, Proc. IEEE APS/URSI Symposium, San Diego, CA, USA, July
2008.
[24] Jorge R. Costa, Carlos A. Fernandes, Eduardo B. Lima, Mário Silveirinha, Marten van der
Vorst, “Design of an Integrated Lens Feed for an Imaging Reflector System using the ILASH
Software Tool”, Proc. ESA Workshop on Antennas for Earth Observation, Science,

83
Telecommunication and Navigation Space Missions, Noordwijk, Netherlands, vol.1, pp. 378–
381, May 2008.
[25] Jorge R. Costa, Eduardo B. Lima, Carlos A. Fernandes, “Compact Beam-Steerable Lens
Antenna for 60 GHz Wireless Communications”, IEEE Trans. on Antennas and Propagation
Special Issue on Antennas and Propagation Aspects of 60 – 90 GHz Wireless
Communications, 2008.
[26] Eduardo B. Lima, Jorge R. Costa, Carlos A. Fernandes, “Mechanical Beam-Steerable Elliptical
Dome Lens”, European Conference on Antennas and Propagation, Berlin, Germany, March
2009 (pending for evaluation).
[27] M. Born, E. Wolf, “Principles of Optics”, N. York, Pergamon, 1959.
[28] A. Peebles, “A Dielectric Bifocal Lens for Multibeam Antenna Applications”, IEEE Trans.
Antennas and Propagation, Vol. 36, no. 5, pp. 599-606, May 1988.
[29] Jorge R. Costa, Mário G. Silveirinha, Carlos A. Fernandes, Eduardo B. Lima, “Shaped Double-
Shell Integrated Lens Antenna for Imaging Applications”, Internal Report, IT/RMOM/ILASH/IR,
Instituto de Telecomunicações, May 2006.
[30] Carlos A. Fernandes, Jorge Costa, Mário Silveirinha, “Final Report of ILASH Project”,
IT/RMOM/ILASH/FR/01/v1, July 2007.
[31] http://www.cst.com.
[32] D. Filipovic, S. Gearhart and G. Rebize, “Double-Slot Antennas on Extended Hemispherical
and Elliptical Silicon Dielectric Lenses”, IEEE Trans. Microwave Theory Tech., vol. 41, no. 10,
pp. 1738-1740, Oct. 1993.
[33] J. Costa, C. Fernandes, G. Godi, R. Sauleau, L. Le Coq and H. Legay, “Compact Ka-band
Lens Antennas for LEO Satellites”, IEEE Trans. Antennas and Propagation, vol. 56, no. 6, pp.
1251-1268, May 2008.
[34] D. Pasqualini, S. Maci, “High-Frequency Analysis of Integrated Dielectric Lens Antennas”,
IEEE Trans. Antennas and Propagation, vol. 52, pp. 840-847, March 2004.
[35] Eduardo Lima, João Henriques, Carlos A. Fernandes, Jorge R. Costa, Deliverable 3 – ILASH
User’s Manual – final version, IT/RMOM/ILASH/D/02/v3, 30-July-2007.
[36] Andreia Fernandes, João Cunha, “Control Software for Anechoic Chamber Antenna
Measurements”, Licenciatura, Sept. 2003.

84
[37] J. Costa, C. Fernandes, E. Lima, “Antena compacta com orientação mecânica do feixe de
radiação, para seguimento de terminais móveis em comunicações sem fios”, Portuguese
Design Patent, Patent pending, Jun 2008.

A-1
A. Annexes
A.1. Prototype structure
The antenna is formed by a shaped dielectric lens and by a supporting structure, which allows the lens
to rotate and tilt. A stationary horn antenna is placed beneath the lens in order to illuminate it with an
electromagnetic wave. The lens is axial symmetric and two lateral extensions are attached to it,
enabling the lens to tilt in relation to a horizontal axis, defined by the horn aperture. As can be seen in
Figure A.1, the lens is supported by two vertical arms that are attached to the structure base. The
entire body previously described can be rotated around the symmetry axis of the fixed horn antenna.
In this way, the lens axis can aim at any direction inside a conical region, centred at the horn axis.
Figure A.1 – Prototype structure.

A-2
A.2. Manufactured Prototypes' Photos
Figure A.2 – Solution with two refraction surfaces (L2 lens)

A-3
Figure A.3 – Steerable elliptical dome lens (L1 lens)

A-4
a) b)
Figure A.4 – Horn antenna photos: a) front view; b) top view.
a) b)
Figure A.5 – Mechanical Beam Steering structure, without the feed attached:
a) side view; b) front view.



















