MECHANICAL PROPERTIES OF SPINAL CORD GREY MATTER …
160
MECHANICAL PROPERTIES OF SPINAL CORD GREY MATTER AND WHITE MATTER IN CONFINED COMPRESSION by Justin Junehung Yu B.A.Sc., University of Waterloo, 2015 A THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF APPLIED SCIENCE in THE FACULTY OF GRADUATE AND POSTDOCTORAL STUDIES (Biomedical Engineering) THE UNIVERSITY OF BRITISH COLUMBIA (Vancouver) December 2019 © Justin Junehung Yu, 2019
Transcript of MECHANICAL PROPERTIES OF SPINAL CORD GREY MATTER …

MECHANICAL PROPERTIES OF SPINAL CORD GREY
MATTER AND WHITE MATTER IN CONFINED
COMPRESSION
by
Justin Junehung Yu
B.A.Sc., University of Waterloo, 2015
A THESIS SUBMITTED IN PARTIAL FULFILLMENT OF
THE REQUIREMENTS FOR THE DEGREE OF
MASTER OF APPLIED SCIENCE
in
THE FACULTY OF GRADUATE AND POSTDOCTORAL STUDIES
(Biomedical Engineering)
THE UNIVERSITY OF BRITISH COLUMBIA
(Vancouver)
December 2019
© Justin Junehung Yu, 2019

ii
The following individuals certify that they have read, and recommend to the Faculty of Graduate
and Postdoctoral Studies for acceptance, a thesis entitled:
Mechanical properties of spinal cord grey matter and white matter in confined compression
submitted by Justin Junehung Yu
in partial fulfillment of the requirements
for
the degree of Master of Applied Science
in Biomedical Engineering
Examining Committee:
Thomas Oxland, Department of Orthopaedics & Mechanical Engineering
Supervisor
Peter Cripton, Department of Biomedical Engineering & Mechanical Engineering
Supervisory Committee Member
David Wilson, Department of Orthopaedics & Mechanical Engineering
Supervisory Committee Member

iii
Abstract
To better understand the link between spinal cord impact and the resulting tissue damage,
computational models are often used. These models typically simulate the spinal cord as a
homogeneous and isotropic material. Recent research suggests that grey and white matter tissue
differences and directional differences, i.e. anisotropy, are important to predict spinal cord
damage. The objective of this research was to characterize the mechanical properties of spinal
cord grey and white matter tissue in confined compression.
Spinal cords (n=11) from the thoracic and cervical regions of pigs (Yorkshire and Yucatan) were
harvested immediately following euthanasia. The spinal cords were flash frozen (60 secs at -80
oC) and prepared into four types of test samples: grey matter axial, grey matter transverse, white
matter axial, white matter transverse. For each sample type, 2 mm diameter biopsy samples were
collected, thawed, and subsequently tested with a custom confined compression apparatus. This
was performed within 6 hours of euthanasia, minimizing time post-mortem effects. All samples
were compressed to 10% strain at a quasi-static strain rate (0.001/sec) and allowed to relax for
120 secs. A quasi-linear viscoelastic model combining a first-order exponential with a 1-term
Prony series was used to characterize the loading and relaxation responses respectively. The
effect of tissue type (grey matter vs. white matter), direction (axial vs. transverse), and their
interaction were evaluated with a two-way ANOVA (p<0.05) with peak stress, aggregate
modulus, and relaxation time as dependent variables.
The mechanical properties of spinal cord grey and white matter were found to be heterogeneous
and slightly anisotropic. For peak stress, the effect of tissue type showed that grey matter was 1.6
times stiffer than white matter. For aggregate modulus, the effect of tissue type showed that grey
matter was 2 times stiffer than white matter. The effect of direction showed that the transverse
direction was 1.3 times stiffer than the axial direction. For relaxation time, grey matter took 1.6
times longer to relax than white matter in the transverse direction. These findings emphasize the
importance of tissue type and to a lesser extent direction when studying SCI biomechanics using
computational models.

iv
Lay Summary
Spinal cord injury (SCI) is often studied using mathematical models. These models simulate
spinal cord deformation. The reliability of these models are dependent on underlying
assumptions about the material behaviour. The material properties describing the material
behaviour are controversial and sparse in the literature. Studying material properties will relate
spinal cord deformation to tissue damage and neurological deficits.
Spinal cord tissue was used to study material properties. The spinal cord was separated into
different specimens to analyze the effect of tissue (grey matter, white matter) and direction
(axial, transverse).
The specimens were placed under compression and their behaviour was measured. The model
showed spinal cord grey matter was stiffer than white matter, and the transverse direction was
slightly stiffer than the axial direction. This contributes new material properties for future SCI
mathematical models.

v
Preface
This thesis represents my own work under the guidance of Dr. Oxland. The study was designed
by me in collaboration with Dr. Tom Oxland. The experiments, data collection, and data analysis
were conducted by myself.
The mechanical design in Chapter 2 of the confined compression apparatus and biopsy punch
was designed by me with design input from Dr. Tom Oxland and Dr. Robin Coope. The
fabrication of this design was performed by the British Columbia Cancer Agency Machine Shop.
The pig spinal cord tissue was provided by Dr. Brian Kwon’s laboratory group. Harvesting of the
spinal cord from the pig and removal of the dura mater were performed by Neda Manouchehri
and Megan Webster. Animal ethics were not required since ex-vivo animal tissue was used for
this study.

vi
Table of Contents
Abstract .......................................................................................................................................... iii
Lay Summary ................................................................................................................................. iv
Preface............................................................................................................................................. v
Table of Contents ........................................................................................................................... vi
List of Tables .................................................................................................................................. x
List of Figures ................................................................................................................................ xi
List of Abbreviations .................................................................................................................... xv
Acknowledgements ..................................................................................................................... xvii
Chapter 1: Introduction ................................................................................................................... 1
1.1 Background & Motivation .................................................................................................... 1
1.2 Project Definition .................................................................................................................. 2
1.3 Anatomy of the Human Spine and Spinal Cord.................................................................... 2
1.3.1 The Spinal Column ........................................................................................................ 2
1.3.2 The Spinal Cord ............................................................................................................. 5
1.3.3 Grey Matter and White Matter ....................................................................................... 7
1.4 Overview of Spinal Cord Injury ......................................................................................... 11
1.4.1 Epidemiology and Etiology ......................................................................................... 11
1.4.2 Pathophysiology of Spinal Cord Injury ....................................................................... 12
1.5 Experimental Modeling of Spinal Cord Injury ................................................................... 12
1.5.1 Animal Models of SCI ................................................................................................. 13
1.5.2 Spinal Cord Injury Mechanisms .................................................................................. 15
1.5.3 Effect of Velocity, Depth, and Duration ...................................................................... 18
1.6 Spinal Cord Finite Element Model ..................................................................................... 20
1.6.1 Finite Element Modeling ............................................................................................. 20
1.6.2 Constitutive Models ..................................................................................................... 21
1.6.3 Spinal Cord Computational Models............................................................................. 24
1.7 Spinal Cord Mechanical Properties .................................................................................... 26
1.7.1 Loading Types ............................................................................................................. 27
1.7.2 Intact Spinal Cord Mechanical properties .................................................................... 29
1.7.3 Spinal Cord Grey Matter and White Matter Mechanical properties ............................ 33

vii
1.7.4 Spinal Cord Grey Matter and White Matter Anisotropy ............................................. 36
1.7.5 Gap in literature ........................................................................................................... 40
1.8 Thesis .................................................................................................................................. 40
1.8.1 Research Question ....................................................................................................... 40
1.8.2 Thesis Objectives ......................................................................................................... 40
1.8.3 Hypotheses ................................................................................................................... 41
1.8.4 Scope ............................................................................................................................ 41
Chapter 2: Methods ....................................................................................................................... 42
2.1 Mechanical Design of the Biopsy Punch & Confined Compression Apparatus ................ 42
2.1.1 Biopsy Punch Design ................................................................................................... 42
2.1.2 Confined Compression Apparatus Design ................................................................... 45
2.1.1.1 Confined Compression Apparatus Overview ....................................................... 46
2.1.1.2 Confined Compression Fixture ............................................................................. 47
2.1.1.3 Load Cell Sizing ................................................................................................... 48
2.1.1.4 Nonporous Indenter .............................................................................................. 49
2.1.1.5 Magnetic End Effector .......................................................................................... 51
2.1.1.6 Actuator................................................................................................................. 51
2.1.1.7 Design Feature #1: Connection between the Nonporous Indenter and the Magnetic
End Effector ...................................................................................................................... 52
2.1.1.8 Design Feature #2: Tissue Leakage Prevention .................................................... 53
2.1.2 Verification of the Load Cell Accuracy ....................................................................... 56
2.1.3 Verification of the Confined Compression Apparatus Repeatability .......................... 56
2.1.4 Pilot Test Validation for Mechanical Design ............................................................... 57
2.1.4.1 Porous Filter .......................................................................................................... 57
2.1.4.2 Measuring Time Independent and Dependent Properties of Spinal Cord Tissue . 58
2.2 Spinal Cord Sample Preparation ......................................................................................... 60
2.3 Confined Compression Testing Protocol ............................................................................ 64
2.3.1 Time Post-Mortem Criterion........................................................................................ 64
2.3.2 Test Order .................................................................................................................... 65
2.3.3 Sample Size .................................................................................................................. 66
2.4 Experimental Protocol ........................................................................................................ 67
2.5 Constitutive Modeling ........................................................................................................ 68
2.5.1 Parameter Optimization ............................................................................................... 69

viii
2.5.2 Outcome Variables....................................................................................................... 70
2.6 Statistical Methods .............................................................................................................. 70
2.6.1 Effect of Tissue Type and Direction ............................................................................ 70
2.6.2 Effect of Time Post-Mortem ........................................................................................ 71
2.7 Histological Methods .......................................................................................................... 71
2.7.1 White Matter Axon Direction Verification .................................................................. 72
2.7.2 Grey Matter Heterogeneity Verification ...................................................................... 75
Chapter 3: Results ......................................................................................................................... 76
3.1 Stress-Strain and Stress Relaxation Responses................................................................... 76
3.2 Constitutive Model Fit ........................................................................................................ 78
3.2.1 Outcome Variables....................................................................................................... 79
3.3 Statistical Results ................................................................................................................ 80
3.3.1 Verifying Two-way ANOVA Assumptions ................................................................ 80
3.3.2 Peak Stress Results ...................................................................................................... 81
3.3.3 Aggregate Modulus Results ......................................................................................... 82
3.3.4 Time Constant Results ................................................................................................. 83
3.3.5 Effect of Time Post-Mortem on Peak Stress Results ................................................... 85
3.4 Histology ............................................................................................................................. 86
Chapter 4: Discussion ................................................................................................................... 89
4.1 Overview ............................................................................................................................. 89
4.2 Mechanical Property Findings ............................................................................................ 89
4.2.1 Time Independent Mechanical Properties ................................................................... 89
4.2.2 Time Dependent Mechanical Properties ...................................................................... 91
4.2.2.1 Aggregate Modulus ............................................................................................... 92
4.2.2.2 Time Constant ....................................................................................................... 93
4.2.3 Effect of Time Post-Mortem on Peak Stress................................................................ 94
4.3 Comparison to Histological Parameters.............................................................................. 94
4.4 Clinical Relevance to SCI ................................................................................................... 97
4.4.1 The Effect of Time Independent Mechanical Properties on SCI ................................. 97
4.4.2 The Effect of Time Dependent Mechanical Properties on SCI ................................... 99
4.4.3 The Effect of Spinal Cord Tissue Bulk Moduli ........................................................... 99
4.4.4 Drug Delivery ............................................................................................................ 100

ix
4.5 Limitations ........................................................................................................................ 100
4.5.1 Heterogeneity of Samples .......................................................................................... 100
4.5.2 Strain Rate and Strain Sensitivity .............................................................................. 101
4.5.3 Loading Type ............................................................................................................. 102
4.5.4 Ex-Vivo Tissue .......................................................................................................... 102
Chapter 5: Conclusion................................................................................................................. 103
5.1 Conclusions ....................................................................................................................... 103
5.2 Contributions..................................................................................................................... 104
5.3 Recommendations for Future Work.................................................................................. 104
5.4 Concluding Statement ....................................................................................................... 105
References ................................................................................................................................... 106
Appendix A – Engineering Drawings ......................................................................................... 114
Appendix B – Pilot Test Data in Air ........................................................................................... 121
Appendix C – Load Cell Calibration .......................................................................................... 122
Appendix D – Repeatability Analysis of Confined Compression Apparatus ............................. 123
Appendix E – Specimen Testing Order ...................................................................................... 125
Appendix F – Power Analysis .................................................................................................... 126
Appendix G – Constitutive Modeling Hand Calculations .......................................................... 128
Appendix H – Constitutive Modeling Matlab Script .................................................................. 130
Appendix I – Staining Protocols ................................................................................................. 137
Appendix J – Raw Data: Stress-time curves, Constitutive Model Fit, Outcome Variables ....... 140

x
List of Tables
Table 1-1: Material property combinations for modeling the spinal cord in finite element
simulations adapted from Jannesar et al. [8] ................................................................................. 25
Table 1-2: Key parameters used in the literature investigating intact spinal cord mechanical
properties [42]–[44], [65]–[67], [73]. The shaded cells indicate that the author(s) did not measure
that quantity. ................................................................................................................................. 31
Table 1-3: Key parameters used in the literature to compare grey and white matter properties
from the literature [11], [41], [47], [59], [60], [63]. The shaded cells indicate that the author(s)
did not measure that quantity. ....................................................................................................... 34
Table 1-4: Key parameters used in the literature to compare grey and white matter anisotropy
properties from the literature [11], [60]. ....................................................................................... 38
Table 1-5: Brain anisotropy ratio in the literature, categorized by loading type [56], [57], [71],
[85]. The shaded cells indicate that the author(s) did not measure that quantity.......................... 39
Table 2-1: Example specimen testing order in a six hour window ............................................... 65
Table 3-1: Material constants A, B, g, and ꞇ (mean ± SD) for GA, GT, WA, and WT specimens
....................................................................................................................................................... 79
Table 3-2: Peak stress, aggregate modulus, and time constant (mean ± SD) for GA, GT, WA, and
WT specimens ............................................................................................................................... 79
Table 3-3: Summary of Shapiro-Wilk scores for each specimen and dependent variable ........... 80
Table 3-4: Levene’s test score for homogeneity of variance for each dependent variable ........... 80
Table C-1: Load cell calibration using standard weights. The gain in the load cell was adjusted
based on the error ........................................................................................................................ 122
Table E-1: Specimen testing order for all pigs (n=11) ............................................................... 125
Table F-1: Power analysis (Part 1) calculation used to calculate minimum sample size for this
thesis. The study by Prange & Margulies, 2002 was used as reference [57] .............................. 126
Table F-2: Power analysis (Part 2) calculation used to calculate minimum sample size for this
thesis. The study by Prange & Margulies, 2002 was used as reference [57]. ............................. 127
Table J-1: Constitutive model material constants for GA, GT, WA, and WT specimens for all
pigs .............................................................................................................................................. 141

xi
List of Figures
Figure 1-1: The vertebral column. The spine consists of 24 articulating vertebrae and 5 distinct
regions: cervical, thoracic, lumbar, sacral, coccygeal. The image is adapted from:
https://opentextbc.ca/anatomyandphysiology/chapter/7-3-the-vertebral-column/ - CC by 4.0 ...... 3
Figure 1-2: Anatomy of typical vertebra. The image is from:
https://opentextbc.ca/anatomyandphysiology/chapter/7-3-the-vertebral-column/ - CC by 4.0 ...... 4
Figure 1-3: A mid-sagittal section (left) and a 3D isometric view (right) of the intervertebral disc.
The nucleus pulposus (NP) and annulus fibrosis (AF) along with the typical features are shown –
CC by 4.0 [9]................................................................................................................................... 4
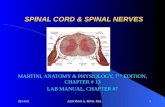
Figure 1-4: Dermatome pattern indicating which spinal nerves innervate specific areas of the
body. The image is by Mikael Häggström, used with permission. ................................................. 6
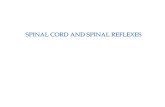
Figure 1-5: The pia mater, arachnoid mater, and dura mater surround the spinal cord and are
known as the meninges. The image is by Mysid Inkscape – public domain. ................................. 7
Figure 1-6: Grey matter and white matter in the spinal cord. The image is from:
https://opentextbc.ca/anatomyandphysiology/chapter/13-2-the-central-nervous-system/ - CC by
4.0.................................................................................................................................................... 7
Figure 1-7: Anatomy of a neuron. Electrical impulses travel from the left hand side to the right
hand side. The image is from: https://opentextbc.ca/anatomyandphysiology/chapter/12-2-
nervous-tissue/ - CC by 4.0 ............................................................................................................. 8
Figure 1-8: Histological staining of grey matter tissue structure. Each anatomical plane shows
randomly oriented axons in the dorsal and ventral horns. Axons are illustrated in green while cell
nuclei are in blue [11]. Reprinted with permission ......................................................................... 9
Figure 1-9: White matter tracts in a human spinal cord. The image is by Polarlys and Mikael
Häggström – CC by SA 3.0 .......................................................................................................... 10
Figure 1-10: Histological staining of white matter tissue structure. Long axons are seen in the
coronal and sagittal planes while cross sections of axons are seen the transverse plane. Axons are
illustrated in green while cell nuclei are in blue [11]. Reprinted with permission ....................... 10
Figure 1-11: Etiology of adult SCI [14] ........................................................................................ 11
Figure 1-12: Level of injury of adult SCI [14] ............................................................................. 12
Figure 1-13: Anatomical and physiological differences between the rat and human spinal cord.
The primary differences are the physical dimensions of the spinal cord as well as the location of
the white matter tracts [28]. Reprinted with permission ............................................................... 13
Figure 1-14: Magnetic resonance imaging of a Sprague-Dawley rat (A), Yucatan miniature pig
(B), and a human (C) at the T10 level. The prominent CSF layer (white layer of liquid)
surrounding the spinal cord is observed in both human and porcine images. The figure was
adapted from Lee et al. [29]. Reprinted with permission. ............................................................ 15
Figure 1-15: SCI fracture patterns and injury mechanisms. Sagittal view of a burst fracture
causing a contusion injury mechanism (A), sagittal view of a dislocation injury causing a
dislocation injury mechanism (B), transverse view of a burst fracture causing a contusion injury
mechanism (C), and a transverse view of a dislocation injury causing a dislocation injury
mechanism (D) [37]. Reprinted with permission ......................................................................... 16

xii
Figure 1-16: Maximum principal strain distribution of various material property combinations
for the grey and white matter tissue using Model A (a), Model B (b), Model C (c). The resultant
tissue damage from the NHP contusion injury was stained using histological analysis (d). This
figure was adapted from Jannesar et al. [8]. Reprinted with permission ...................................... 26
Figure 1-17: Confined compression schematic. The tissue is represented by the dark grey block
applying the reaction force on the nonporous metal indenter. The variable d(t) represents a
displacement controlled actuator that applies a displacement onto the nonporous indenter
deforming the tissue. Reprinted with permission [69] .................................................................. 28
Figure 1-18: Sample Stress-strain data from several studies of spinal cord mechanical properties
in tension [72]. Reprinted with permission. .................................................................................. 30
Figure 2-1: Custom biopsy punch. The punch tube was welded within an adapter and was
threaded onto a handle. ................................................................................................................. 43
Figure 2-2: Cross-section of the spinal cord showing grey matter axial (GA) (a), grey matter
transverse (GT) (b), white matter axial (WA) (c), and white matter transverse (WT) (d)
specimens. The circle and rectangle illustrate specimens that are ollected axially (through the
page) and transversely (across the page) respectively. The sample dimensions denoted by the
circles and rectangles are roughly to scale. The amount of grey and white matter in the spinal
cord is specific to the spinal cord region (cervical, thoracic, and lumbar). As such the image may
not accurately reflect the amount of grey and white matter observed in the spinal cord tissue used
in this study. The image is adapted from Polarlys – CC by SA 3.0.............................................. 44
Figure 2-3: Confined compression schematic of tissue sample. A sectional view of the adapter is
shown illustrating key components involved in confined compression. The specimen shown is
approximately to scale. ................................................................................................................. 45
Figure 2-4: Confined compression apparatus with key components labeled. The electromagnetic
actuator was mounted above the confined compression fixture. The magnetic end effector was
threaded into the actuator. The nonporous indenter is not shown in this figure due to its small
size. It is shown in Figure 2-6 instead........................................................................................... 47
Figure 2-5: Confined compression fixture with parts labeled. This fixture was machined by the
British Columbia Cancer Agency machine shop. ......................................................................... 48
Figure 2-6: Nonporous indenter with parts labeled. The welding was performed by the British
Columbia Cancer Agency machine shop. ..................................................................................... 49
Figure 2-7: The nonporous indenter was inserted into the adapter and initially supported with a
spacer to avoid contact with the specimen. ................................................................................... 50
Figure 2-8: Magnetic end effector with parts labeled. .................................................................. 51
Figure 2-9: Magnetized connection between the magnetic end effector and the nonporous
indenter. The magnetized steel ball and the nonporous indenter were initially disconnected from
each other. To use, the steel ball was lowered until it attracted the nonporous indenter below at
which point the spacer was removed. Since the nonporous indenter was already constrained
within the bore of the adapter, the alignment issue was mitigated. .............................................. 53
Figure 2-10: The schematic from Figure 2-3 was updated to show the placement of the square
profile O-ring. This prevented tissue leakage from occurring between the porous filter and the
biopsy punch tube interface. ......................................................................................................... 54

xiii
Figure 2-11: The square profile O-ring was first slipped onto the punch tube prior to lowering the
biopsy punch tube (a). Once the punch tube was lowered, the adapter holder was further lowered
until it contacted the O-ring and compressed it against the porous screen (b). ............................ 55
Figure 2-12: Pilot test for testing the permeability of various screens ......................................... 58
Figure 2-13: Pilot test apparatus for measuring the time independent and dependent properties of
spinal cord tissue. The electromagnetic actuator (a) and the proof of concept confined
compression fixture (b) are shown. ............................................................................................... 59
Figure 2-14: Displacement vs. time graph (top) and Stress vs, time graph (bottom) of pig spinal
cord white matter tissue ................................................................................................................ 60
Figure 2-15: The intact spinal cord with dura mater excised. A ruler is placed in proximity for
scaling purposes to show length (a) and diameter (b). The thoracic spinal cord is the smaller one
compared to the neighbouring cervical spinal cord ...................................................................... 61
Figure 2-16: An aluminum plate with demarcated lines was used to reduce the length of the
spinal cord. The “cross-section” cutting cradle (shown in black) was used to assist with cutting
cross-sections. The finished product is shown on the left hand side. ........................................... 62
Figure 2-17: The "separator" cutting cradle is used to separate the lateral white matter from the
central grey matter ........................................................................................................................ 63
Figure 2-18: A toothpick was inserted through the custom biopsy punch and marked to denote
the specimen height (2.8 ± 0.5 mm) ............................................................................................. 64
Figure 2-19: Immunofluorescence images of white matter specimens. Axons are stained in green
(SMI), myelin is stained in red (MBP), and neuronal cell bodies are stained in blue (Tub). (a)
Cross-section of WA specimen. (b) Cross-section of WT specimen. (c) Close-up of WA
specimen. (d) Close-up of WT specimen. ..................................................................................... 74
Figure 2-20: Sample eriochrome cyanine stained images of grey matter specimens. Myelin
(white matter) is in orange and grey matter is in blue (a) Cross-section of GA specimen. (b)
Cross-section of GT specimen. ..................................................................................................... 75
Figure 3-1: Mean (blue) plus/minus one standard deviation (red) for GA (a), GT (b), WA (c), and
WT (d) specimens of all 11 pigs ................................................................................................... 76
Figure 3-2: Mean stress-strain response for porcine spinal cord specimen types (indicated in the
legend)........................................................................................................................................... 77
Figure 3-3: Mean stress-time response for porcine spinal cord specimen types (indicated in the
legend)........................................................................................................................................... 77
Figure 3-4: Experimental stress-time data and constitutive model fit of GA (a), GT (b), WA (c),
and WT (d) specimen data. The mean (blue) was plotted along with the loading (orange) and
relaxation (yellow) curve fits for pig #11. .................................................................................... 78
Figure 3-5: Column plot of mean peak stress (mean ± SD) for GA, GT, WA, and WT specimens
....................................................................................................................................................... 81
Figure 3-6: Column plot of mean aggregate modulus (mean ± SD) for GA, GT, WA, and WT
specimens ...................................................................................................................................... 82
Figure 3-7: Column plot of mean time constant (mean ± SD) for GA, GT, WA, and WT
specimens ...................................................................................................................................... 84
Figure 3-8: The effect of time post-mortem on peak stress of GA, GT, WA, and WT specimens.
A linear trendline was plotted for each of the four specimen types.............................................. 85

xiv
Figure 3-9: H&E stained spinal cord sections showing gross morphology of GA (a), GT (b), WA
(c), WT (d) specimens. The scale bar represents 500 μm. ............................................................ 86
Figure 3-10: H&E stained spinal cord sections showing close-up of gross morphology of GA (a),
GT (b), WA (c), and WT (d) specimens. Cell nuclei are stained in blue. The scale bar represents
250 μm. ......................................................................................................................................... 87
Figure 4-1: Geometry of GA (left) and GT (right) specimens during sample collection. The circle
and rectangle represents an approximated scaled sample. The image is adapted from Polarlys –
CC by SA 3.0 ................................................................................................................................ 95
Figure B-1: Pilot test data in air. The same strain rate and strain were implemented to measure
the background noise that is generated when there is no specimen within the adapter. The
increase in noise at the end is when the indenter is being removed from the adapter causing a
spike in load. This is not a part of the testing protocol ............................................................... 121
Figure D-1: Repeatability study using silicone specimen #1. Four confined compression tests
were performed and their load-time curves are shown. COV was calculated resulting in 6%
variability. ................................................................................................................................... 123
Figure D-2: Repeatability study using silicone specimen #2. Three additional confined
compression tests were performed and their load-time curves are shown. COV was calculated
resulting in 4% variability. .......................................................................................................... 124
Figure G-1: Hand calculations for the analytical solution to the constitutive model used to model
stress relaxation. The final solution for the ramp phase (Eq. 1) and the hold phase (Eq. 2) are
shown. ......................................................................................................................................... 129
Figure J-1: All stress-time plots for GA (a), GT (b), WA (c), and WT (d) specimens for all 11
pigs .............................................................................................................................................. 140
Figure J-2: Peak Stress between specimen types for all pig specimens tested ........................... 142
Figure J-3: Aggregate Modulus between specimen types for all pig specimens tested ............. 142
Figure J-4: Time constant between specimen types for all pig specimens tested ....................... 143

xv
List of Abbreviations
ANOVA – Analysis of variance
CAD – Computer-aided design
CCM – Centre for Comparative Medicine
CNS – Central nervous system
COV – Coefficient of variation
CSF – Cerebrospinal fluid
EC – Eriochrome cyanine R
GA – Grey matter axial
GT – Grey matter transverse
H&E – Hematoxylin & eosin
ICORD – International Collaboration on Repair Discoveries
LVDT – Linear variable differential transformer
MBP – Myelin basic protein
MRE – Magnetic resonance elastography
MRI – Magnetic resonance imaging
NHP – Non-human primate
OCT – Optimal cutting temperature
OIBG – Orthopaedic & Injury Biomechanics Group
PBS – Phosphate buffered saline
PDGFRα – Platelet-derived growth factor receptor α
PNS – Peripheral nervous system

xvi
QLV – Quasi-linear viscoelastic
SCI – Spinal cord injury
SMI – SMI312
SD – Standard deviation
SEM – Standard error of the mean
Tub – β-tubulin III
UBC – University of British Columbia
WA – White matter axial
WT – White matter transverse

xvii
Acknowledgements
I would like to acknowledge the support and guidance of Dr. Tom Oxland throughout this
project. You have made yourself readily available whenever I needed assistance whether it be the
conversations in your office, over the phone, or over email. You have taught me what academic
research is about. You have also showed me the perseverance of conducting, and finshing a self-
guided independent study.
Thank you to my colleagues Neda Manouchehri, Kitty So, and Megan Webster from Dr. Brian
Kwon’s lab. Your help with coordinating and harvesting spinal cord tissue out at the Centre for
Comparative Medicine, especially those that took place at midnight was appreciated. This project
could have not been possible without your collaboration.
Thank you to my colleagues Oscar Seira Oriach, and Kathleen Kolehmainen from Dr. Wolfram
Tetzlaff’s lab for teaching and helping me with the various histological methods.
Lastly, thank you to all of my colleagues in the OIBG group. You have provided me with a
thriving and collaborative environment for conducting research.

1
Chapter 1: Introduction
1.1 Background & Motivation
Spinal cord injury (SCI) is a devastating event often resulting in a debilitating condition. SCIs
occur from a mechanical insult to the spinal cord resulting in tissue damage. A damaged spinal
cord results in neurological impairment, which depending on level of injury and completeness of
injury, affects motor, sensory, and/or autonomic function [1]. This has attracted clinicians and
scientists as there is a clinical need and currently no effective therapies. Numerous treatment
trials have been conducted in humans, however no therapy has produced a major improvement in
neurological recovery or a meaningful increase in function [2]. It is hypothesized that a
discrepancy between human trials and pre-clinical experimental SCI animal models exist due to
their inability to represent the human condition [2].
This lack of translation between pre-clinical research and human trials may be due to the
heterogeneity of human SCI. This means the population sustaining injury, mechanisms of injury,
level of injury, and severity are among many factors that have an impact on SCI cases [2]. Pre-
clinical SCI animal models used to study human SCI often represent only a single injury model
therefore disregarding the heterogeneity of human SCI [2].
Mechanisms of injury contributing to SCI heterogeneity can be studied using computational
models. These models help relate spinal cord impact with spinal cord tissue damage. The
reliability of these models are dependent on the underlying spinal cord material behaviour. The
intrinsic differences in the biomechanical properties of grey and white matter can influence the
onset, magnitude and distribution of tissue damage when studying human SCI [3]. Knowledge of
the tissue tolerances of grey and white matter will relate injury mechanisms with tissue damage
patterns and ultimately their neurological deficits. This may help reduce the gap between pre-
clinical research and human trials [4].
My thesis continues a line of research at the Orthopaedic & Injury Biomechanics Group (OIBG)
at the University of British Columbia (UBC) to better understand the link between spinal cord
impact and the resulting tissue damage. One long-term goal of this research is to establish a fully
developed spinal cord computational model so that it can be added to full human body computer

2
models. This will prove useful for automobile and helmet safety testing as well as inspire new
treatment and prevention based SCI therapies. Specifically, my thesis focuses on determining the
ex-vivo mechanical properties of the spinal cord grey and white matter and their anisotropy (ie.
directional differences).
1.2 Project Definition
When studying SCI biomechanics with the purpose of improving human injury modeling,
computational models such as finite element methods are used. Their validity however depends
on the underlying assumptions that are made during model development. When it comes to the
material constitutive model of the spinal cord, it is usually assumed to exhibit homogeneous, and
isotropic properties [4]–[7]. However recent research suggests that accounting for anisotropy is
important for predicting spinal cord damage and its inclusion will improve the biofidelity of
finite element models [8]. This has brought forth the need to determine the mechanical properties
of spinal cord grey and white matter and their anisotropy.
1.3 Anatomy of the Human Spine and Spinal Cord
The mechanical properties of biological and non-biological tissues are a function of their
underlying morphologies. Spinal cord grey and white matter tissue possess distinct structural
characteristics. To understand these differences and how they are modeled, it is first necessary to
understand the relevant anatomy and physiology associated with the spinal cord.
1.3.1 The Spinal Column
The spinal column serves to protect the spinal cord, provide structural support for the human
body, and enable movement (Figure 1-1). It consists of 24 articulating vertebrae separated by
intervertebral discs that are divided into three distinct regions. These are the cervical, thoracic,
and lumbar regions. There are 7 cervical vertebrae (C1-C7), 12 thoracic vertebrae (T1-T12), and
5 lumbar vertebrae (L1-L5). The cervical spine corresponds with the neck of the body and its
purpose is to support and provide motion to the head. The thoracic spine corresponds to the mid-
back and together with the rib cage protects crucial organs such as the heart and lungs. The
lumbar spine corresponds to the low back and supports the weight of the body along with any
external loads carried by the body. Below the lumbar spine are the sacral and coccygeal (ie.
tailbone) regions. The vertebrae here are fused and thus unable to articulate independently. There

3
are 5 sacral vertebrae (S1-S5) and 4 coccygeal vertebrae. Only the cervical and thoracic regions
of the spine are relevant to the work discussed in this thesis because the spinal cord terminates
before the first lumbar vertebrae. As a result, additional details covering the other spinal regions
will not be further discussed.
Figure 1-1: The vertebral column. The spine consists of 24 articulating vertebrae and 5
distinct regions: cervical, thoracic, lumbar, sacral, coccygeal. The image is adapted from:
https://opentextbc.ca/anatomyandphysiology/chapter/7-3-the-vertebral-column/ - CC by
4.0
There are differences between the cervical and thoracic vertebrae but they possess the same basic
characteristics. A typical vertebrae consists of a vertebral body and a vertebral arch (Figure 1-2).
The vertebral arch is posterior to the vertebral body. It is made of pedicles which extend
posterolaterally from the vertebral body and laminae which extend posteromedially from the
pedicles thus forming the vertebral foramen. Adjacent vertebrae are aligned such that the
vertebral foramen forms the spinal canal encompassing and protecting the spinal cord. Seven
bony projections known as processes extend from the arch: two transverse processes are found
laterally, one spinous process is found posteriorly, two superior and two inferior articular
processes are found posterolaterally. The processes serve as attachment points for ligaments, and
muscles. The superior articular processes pair with the inferior articular processes between
adjacent vertebrae forming the facet joints guiding motion in the spine.

4
Figure 1-2: Anatomy of typical vertebra. The image is from:
https://opentextbc.ca/anatomyandphysiology/chapter/7-3-the-vertebral-column/ - CC by
4.0
The intervertebral disc is located between the adjacent vertebral bodies below C2. They help
with absorbing impact during weight bearing movements. Each intervertebral disc consists of the
annulus fibrosis and nucleus pulposus (Figure 1-3). The annulus consists of concentric rings
surrounding the nucleus and are made of lamellae of fibrocartilage while the nucleus is a gel-
filled substance found in the centre comprised mainly of water. The nucleus acts similar to a ball
bearing allowing motion between adjacent vertebral bodies.
Figure 1-3: A mid-sagittal section (left) and a 3D isometric view (right) of the intervertebral
disc. The nucleus pulposus (NP) and annulus fibrosis (AF) along with the typical features
are shown – CC by 4.0 [9].

5
The vertebral bodies are joined together by several ligaments along the length of the spinal
column. These act to limit the mobility of the spinal column by preventing excessive backward
or forward bending movements. Since the emphasis of this thesis is on the spinal cord, ligaments
will not be further discussed.
1.3.2 The Spinal Cord
The spinal cord is a thin cylindrical structure extending caudally from the medulla oblongata in
the brainstem that passes through the vertebral foramen. It is part of the central nervous system
(CNS) and is made of nervous tissue. The distal end of the spinal cord structure is no longer
cylindrical as it becomes a bundle of nerves and rootlets known as the cauda equina [10].
The spinal cord serves as a conduction pathway for nerve signals connecting the brain to the
peripheral nervous system (PNS). It branches into 31 pairs of spinal nerves with one pair (left &
right) exiting the spinal cord at each vertebral level. There are 8 pairs of cervical nerves, 12 pairs
of thoracic nerves, 5 pairs of lumbar nerves, 5 pairs of sacral nerves, and one pair of coccygeal
nerves [10]. Each spinal nerve includes sensory and motor fibres. Dorsal nerve fibres relay
sensory (afferent) information to the brain while ventral nerve fibres relay motor (efferent)
information away from the brain. These fibres extend out forming the PNS and innervate
dermatomes (skin receptors), myotomes (muscle fibres), and the autonomic nervous system
leading to bodily sensation, movement, and organ function respectively (Figure 1-4).

6
Figure 1-4: Dermatome pattern indicating which spinal nerves innervate specific areas of
the body. The image is by Mikael Häggström, used with permission.
The spinal cord is protected and enveloped by three layers of membranes known as meninges
(Figure 1-5). The dura mater is the outermost layer made of dense connective tissue forming the
toughest and thickest protective membrane. Beneath the dura mater is the middle protective layer
known as the arachnoid mater for its spider web like appearance. The third and innermost
protective layer is the pia mater and is directly attached to the spinal cord. The spinal cord is
anchored by the denticulate ligaments over its entire length. The ligaments attach at 21 points on
each side of the spinal cord connecting it to the arachnoid mater and dura mater. The space

7
existing between the arachnoid mater and the pia mater is the subarachnoid space which contains
cerebrospinal fluid (CSF) bathing the entire spinal cord.
Figure 1-5: The pia mater, arachnoid mater, and dura mater surround the spinal cord and
are known as the meninges. The image is by Mysid Inkscape – public domain.
1.3.3 Grey Matter and White Matter
A transverse section of the spinal cord reveals the butterfly shaped grey matter in the centre, and
the surrounding white matter (Figure 1-6). The grey matter consists of neuronal cell bodies, glial
cells, dendrites, and unmyelinated axons. In contrast the white matter does not contain any
neuronal cell bodies and is largely comprised of myelinated axons with fewer glial cells.
Figure 1-6: Grey matter and white matter in the spinal cord. The image is from:
https://opentextbc.ca/anatomyandphysiology/chapter/13-2-the-central-nervous-system/ -
CC by 4.0

8
Neurons are nerve cells located within the spinal cord. The neuron is constructed of a cell body,
dendrites, and an axon (Figure 1-7). The cell body contains the nucleus and organelles to
produce the necessary proteins to maintain the cell’s functions. Dendrites are nerve fibre
projections that receive electrical signals from other neurons. The axon is a nerve fibre and is the
pathway through which the neuron sends its electrical signal. These signals travel as action
potentials which manifests as a change in cell voltage due to ion movement. Axons are typically
surrounded by a fatty substance known as myelin. The myelinated sheath insulates the axons
enabling faster signal conduction. At the terminal end are axon terminals which connect
neighbouring neurons via a synapse. Here an electrochemical process takes place and
information flows from one neuron to the next.
Figure 1-7: Anatomy of a neuron. Electrical impulses travel from the left hand side to the
right hand side. The image is from:
https://opentextbc.ca/anatomyandphysiology/chapter/12-2-nervous-tissue/ - CC by 4.0
Glial cells are supporting nerve cells located in the spinal cord and do not conduct electrical
signals. These include oligodendrocytes, astrocytes, microglia, and ependymal cells, all of which
have differing functions to support neurons. Oligodendrocytes are responsible for producing the
myelin sheath around axons. Astrocytes are star-shaped, provide structural support to other nerve
cells, and provide nutrients to nervous tissue among many other roles. Microglia are the first line
of immune defense for the spinal cord. Ependymal cells line the central canal with cilia and are
involved with the circulation of CSF throughout the spinal cord while delivering nutrients to
neurons and filtering out harmful molecules.

9
Grey matter is primarily subdivided into two distinct regions, the dorsal horn and the ventral
horn (Figure 1-6). The dorsal horn contains sensory neurons that receive information from
dermatomes while the ventral horn contains motor neurons that communicate with myotomes.
Interneurons also exist within the grey matter and are responsible for the reflex arc. Interneurons
relay signals between sensory and motor neurons without communicating with the brain. As a
result of the grey matter’s functions, the tissue structure consists of randomly oriented axons
with numerous cell bodies dispersed throughout (Figure 1-8).
Figure 1-8: Histological staining of grey matter tissue structure. Each anatomical plane
shows randomly oriented axons in the dorsal and ventral horns. Axons are illustrated in
green while cell nuclei are in blue [11]. Reprinted with permission
White matter consists of distinct tracts with separate afferent and efferent pathways (Figure 1-9).
The nomenclature is such that ascending tracts use the term “spino” as a prefix and descending
tracts use the term “spinal” as a suffix. For example the spinothalamic tract is an ascending
pathway that connects the spinal cord to the thalamus whereas the corticospinal tract is a
descending pathway that connects the cortex to the spinal cord. As a result of the white matter’s
functions, the tissue structure has a directional bias consisting of axons running rostralcaudally
throughout the length of the spinal cord (Figure 1-10).

10
Figure 1-9: White matter tracts in a human spinal cord. The image is by Polarlys and
Mikael Häggström – CC by SA 3.0
Figure 1-10: Histological staining of white matter tissue structure. Long axons are seen in
the coronal and sagittal planes while cross sections of axons are seen the transverse plane.
Axons are illustrated in green while cell nuclei are in blue [11]. Reprinted with permission

11
1.4 Overview of Spinal Cord Injury
1.4.1 Epidemiology and Etiology
In Canada, the estimated prevalence of traumatic and non-traumatic SCIs is greater than 85,000
people [1]. The United States estimated up to 347,000 people are affected by SCI with 17,000
new SCI cases per year [12]. SCI results in impaired mobility and function depending on the
level of injury as well as the completeness of injury. In general a higher level of injury is more
detrimental as it results in more bodily dysfunction. Moreover, all spinal levels below the level
of injury will also be affected potentially leading to paraplegia or tetraplegia. This leads to
socioeconomic burden of the patient which includes increased divorce rate, and reduced
employment [12]. Depending on the level of neurological impairment, the average annual
expenses can range between $350,000 to $1,000,000 in the first year and between $43,000 to
$185,000 each subsequent year. In total it can be worth millions of dollars over a lifetime [12].
The etiology indicates that vehicular crashes (~45%) continue to be the leading cause of SCI.
Fall injuries specifically have seen an increasing trend through the years and are the second
leading cause of SCI (~20%) [13]. A breakdown of the causes of SCI are shown in Figure 1-11.
Figure 1-11: Etiology of adult SCI [14]
Motor Vehicle Related
Work
Sports & Recreation
Falls
Violence

12
The injury profile reveals cervical SCIs to be the most prevalent. High cervical SCIs have
increased over the past five decades whereas low cervical SCIs have decreased. Injuries
involving spinal cord levels from T1 to S3 have remained relatively constant [13]. The incidence
of SCI with respect to the level of injury is shown in Figure 1-12.
-
Figure 1-12: Level of injury of adult SCI [14]
1.4.2 Pathophysiology of Spinal Cord Injury
SCI involves a primary and secondary injury [14]. Primary injury is the damage produced by the
initial mechanical deformation. The insult produces mechanical stresses and strains on the tissue
leading to acute tissue damage such as severed axons, demyelination, vascular disruption, and
cellular necrosis [15].
Secondary injuryinvolves a cascade of biochemical and cellular processes that arise as a result of
the primary injury and causes further damage to the spinal cord [14]. Within hours of injury, the
spinal cord swells, and vascular disruption results in hemorrhage of both the grey and white
matter. Consequently this causes ischemia leading to the death of neurons and oligodendrocytes
[15].
1.5 Experimental Modeling of Spinal Cord Injury
The severity of primary and secondary injury of SCI has been shown to be contingent on several
biomechanical parameters in experimental models of SCI. This includes mechanism of injury,
C1-C7
T1-T11
T12-L1
L2-S5

13
velocity of injury, depth of injury, as well as duration of spinal cord compression [16]–[24]. The
effects of each of these parameters are studied in animal model surrogates to understand the
varying degrees of spinal cord tissue damage and subsequent biological responses following SCI.
1.5.1 Animal Models of SCI
The rodent model is the most common animal model used to study experimental SCI. It offers
both advantages and disadvantages. The advantages include their relatively low cost, and similar
pathophysiology to humans. This has allowed researchers to study the pathological cascade of
events that occur from the secondary injury making them the main model for evaluating
experimental treatment strategies [25], [26]. The disadvantages of using a rodent model include
its anatomical and physiological differences with humans. The diameter of the rat spinal cord is
3.5 mm and 90 mm in length which is significantly smaller than a human spinal cord [27]. The
white matter tracts are also organized slightly different than that of humans (Figure 1-13) [28].
Figure 1-13: Anatomical and physiological differences between the rat and human spinal
cord. The primary differences are the physical dimensions of the spinal cord as well as the
location of the white matter tracts [28]. Reprinted with permission
It is perhaps due to these differences between rats and humans that have led to few successes
when translating experimental treatments from rodent models to clinical trials of human SCI [2].
The rat spinal cord is more than three times smaller than the human spinal cord in terms of

14
diameter. This makes it over one order of magnitude smaller in terms of overall volume. Lee et
al. hypothesized that drug efficacy may not be achievable in humans given that the
biodistribution of the drugs therapeutic effects within the rat and human spinal cord are over one
order of magnitude apart [29], [30]. Moreover, the difference in axonal growth that is millimetres
in a rodent model may not translate to centimetres of growth within a human [29].
This disparity in anatomical size between rodent models and humans has prompted the use of
higher order animals as surrogates for SCI research. One of the findings in a survey concluded
that 65%-77% of researchers within the SCI research community agreed that larger animal
models of SCI would be beneficial for pre-clinical research [31]. Being able to demonstrate drug
efficacy in a larger animal after small animal testing was believed to improve the translation of
experimental therapies from animal models to humans.
A larger animal model such as a pig offers several advantages over rodent models. The pig spinal
cord is closer in diameter to that of a human compared to a rat. At the T10 level the pig spinal
cord measures 7 mm in diameter while a human and a rat measure 8.5 mm and 2.5 mm
respectively [29]. The pig spinal cord is also surrounded by a prominent layer of CSF like the
human spinal cord (Figure 1-14). This is clinically advantageous for evaluating the
biodistribution of drugs and their administration either extradurally or intrathecally. The enlarged
CSF space allows for physiological and biochemical monitoring with probes which is otherwise
not possible in rodent models [29], [30]. CSF has also been suggested to protect the spinal cord
by lessening mechanical deformation to the spinal cord [32]. This is an important factor for
studying SCI biomechanics.
The disadvantage of a porcine model is mainly its cost. It is substantially more expensive than
rodent models in terms of initial purchase and ongoing care. Animal care facilities and veterinary
support are required to be able to conduct experimental SCI work on pigs further adding to the
cost of the study [29].

15
Figure 1-14: Magnetic resonance imaging of a Sprague-Dawley rat (A), Yucatan miniature
pig (B), and a human (C) at the T10 level. The prominent CSF layer (white layer of liquid)
surrounding the spinal cord is observed in both human and porcine images. The figure was
adapted from Lee et al. [29]. Reprinted with permission.
1.5.2 Spinal Cord Injury Mechanisms
There are five types of injury mechanisms used in animal modeling of SCI to replicate clinically
relevant primary injuries. These are dislocation, contusion, compression, distraction, and
transection models [16], [17], [23], [33], [34].
The contusion model is historically the most widely used model for producing experimental SCI
and involves an impact on a surgically exposed spinal cord in the dorsoventral direction [16],
[19], [20], [22], [27], [29], [33]–[36]. A weight drop impactor or an electromagnetic impactor are
typically used to contuse the spinal cord causing an acute injury. Weight drop impactors use a
prescribed height, and mass to study SCI while the electromagnetic actuator uses a controlled
displacement (depth) or force to impact the cord with a metal impactor [33].
Contusion impact is thought to be biomechanically similar to vertebral burst fractures which
represent 30% of SCIs [14]. Burst fractures are caused from high energy axial compression
events such as head first impacts or fall from heights leading to spinal cord compression from a
bony fragment (Figure 1-15).

16
Figure 1-15: SCI fracture patterns and injury mechanisms. Sagittal view of a burst
fracture causing a contusion injury mechanism (A), sagittal view of a dislocation injury
causing a dislocation injury mechanism (B), transverse view of a burst fracture causing a
contusion injury mechanism (C), and a transverse view of a dislocation injury causing a
dislocation injury mechanism (D) [37]. Reprinted with permission
The compression model is different from the contusion model such that slow impingement
and/or extended compression of the spinal cord are involved. The latter introduces a temporal
aspect to the injury model. Clip compression and balloon compression are among several
methods used to mimic compression injury models. Clip compression uses a modified aneurysm
clip to generate a SCI controlling for force and compression time following the initial impact.
Balloon compression uses a catheter fed inflatable balloon to compress the spinal cord. This
method relies on inflation volume and rate of inflation to produce a SCI but is typically not
representative of an acute SCI. While force and duration of compression are measured in the
former method, only duration of compression is measured in the latter. In both cases, impact
velocity is not typically measured. Compression models are often combined with contusion

17
models to produce a contusion-compression model whereby an acute impact followed by
prolonged compression are used. This model replicates characteristics of burst fractures where
sustained compression is observed following SCI [33].
Distraction models involve tensile stretching of the spinal cord to produce SCIs. An
electromagnetic actuator controlling for displacement and force is one method that can be used
for this model. A set of vertebrae are held stationary and a set of vertebrae are distracted caudally
[16], [34]. This model replicates flexion-distraction injuries seen in motor vehicle accidents.
Dislocation models displace one vertebrae over an adjacent vertebrae either dorsoventrally or
mediolaterally to generate a SCI. The result is that the adjacent vertebrae are no longer aligned
correctly. The act of dislocating adjacent vertebrae produces a shear force on the spinal cord.
Fiford et al. was first to develop the dislocation model of experimental SCI by using a linear
actuator to laterally dislocate two adjacent vertebrae [17]. In contrast Choo et al. used an
electromagnetic actuator to dorsally dislocate two adjacent vertebrae [16]. In both cases, a set of
vertebrae are held stationary and an adjacent set are displaced laterally or dorsally [16], [17].
Both setups control for displacement and force to create varying degrees of SCI in an animal
model. This model is used to represent a fracture-dislocation injury, the most clinically prevalent
injury occurring in 40% of all SCI cases (Figure 1-15) [14].
Transection models can be either complete or partial. The former fully severs the rostral and
caudal segments of the spinal cord whereas the latter involves selectively severing the spinal
cord. Full transections are useful for investigating axonal regeneration, and are easily
reproducible. While they are highly reproducible, they are not particularly clinically relevant as
complete transections are not commonly seen. Partial transections are useful for comparing
deficits between healthy and injured fibers as in the case of a hemisection [33].
Each of these injury paradigms has been shown to produce different patterns of tissue damage.
Contusion, transection, and compression models directly injure a surgically exposed spinal cord.
However, they are not representative of human SCIs where closed column injuries are more
relevant. Choo et al. performed a study that compared contusion, dislocation, and distraction
injury models. Both distraction and dislocation were closed column injuries. In terms of white
matter damage, there was peripheral white matter sparing with contusion models whereas
dislocations disrupted axons in the lateral white matter [34]. Rostral from the lesion site, it was

18
observed that dislocation and distraction models exhibited more white matter damage than
contusion models [16]. The amount of hemorrhage between models showed that contusion and
dislocation models exhibited similar amounts within grey matter while distraction models saw
almost none [16].
There were differences in observed damage between anterior-posterior and lateral fracture-
dislocation models, introducing an effect of loading direction. A significantly larger volume of
hemorrhage was observed with anterior-posterior dislocation than lateral dislocation. Anterior-
posterior dislocation saw dorsal and ventral white matter damage rostrally and caudally
respectively. In contrast lateral dislocation saw left lateral and right lateral white matter damage
rostrally and caudally respectively. Both models saw tissue damage at the injury epicenter [23].
These differing findings highlight the importance of injury mechanisms and their consideration
when experimentally modeling SCI.
1.5.3 Effect of Velocity, Depth, and Duration
While mechanisms of injury have resulted in varying tissue damage patterns, the effects of injury
velocity, injury depth (displacement), and duration of compressive injury have illustrated varying
severities of injury when modeling SCI in animal models.
The effect of injury depth has shown to be correlated with injury severity. Noyes et al. was
among several researchers who conducted a contusion study with incremental increases in injury
depth. They showed that increased injury depths resulted in an increased lesion volume [18]. A
similar trend was also seen in the fracture-dislocation model by Fiford et al. where increasing
dislocation displacement between adjacent vertebrae led to more axonal injury [17].
The effect of velocity was also shown to correlate with injury severity in a contusion study by
Sparrey et al.. Both hemorrhage volume and axonal disruption were measured for injury
velocities of 3 mm/s and 300 mm/s. For white matter, higher velocity injuries saw a significantly
higher hemorrhage volume and 62% more axonal disruption compared to slower velocity
injuries. For grey matter, it was shown that hemorrhage volume was similar regardless of injury
velocity. It was determined for slow injuries that 83% of the hemorrhage occurred in grey matter
in contrast to 17% in white matter [19].

19
Studies involving the combined effects of injury depth, and injury velocity revealed that both of
these parameters interact together to predict injury severity. Kearney et al. used contusion depths
of 25% - 65% with varied velocities between 1.5 m/s – 6 m/s. The results showed that few
animals recovered beyond 50% injury depth regardless of injury velocity. Moreover, a velocity
and compression product (velocity x compression) greater than two demonstrated the combined
effects of both parameters as no animals recovered beyond this point [20].
Lam et al. also studied these interactive effects while varying velocities of 8 mm/s, 80 mm/s, and
800 mm/s with depths of 0.9 mm and 1.5 mm. There was little difference in grey and white
matter sparing when the 0.9 mm depth was held constant and injury velocities were varied.
However much larger differences were observed in tissue sparing between velocities when a 1.5
mm depth was used. The effect of injury depth, velocity, and their interaction significantly
affected white matter sparing where only the effect of injury depth significantly affected grey
matter sparing. This revealed the effect of different mechanical parameters on the spinal cord
constituents. Here injury depth was a more consistent predictor for injury severity while velocity
became more relevant once an injury depth threshold was surpassed [22].
The effect of duration and residual compression was also shown to play a role in predicting
injury severity. Residual compression is defined as a percentage of spinal cord occlusion and
duration of occlusion in the spinal canal. Sjovold et al. applied 0%, 40%, and 90% residual
compression in a contusion model for a duration of 60 mins. It was observed there was 60%-85%
more neuronal nuclei damage in the grey matter at 90% compared to 40% residual compression
[38]. Dimar et al. conducted two experiments in which both residual compression and duration
were varied independently. The first experiment placed spacers in the spinal canal to occlude the
spinal cord by 0%, 20%, 35%, and 50% respectively while measuring neurological recovery over
six weeks. The results showed that significantly better functional recovery occurs with lower
occlusions except for 35% and 50% residual compression where it was non-significant. The
second experiment maintained 35% residual compression for up to 72 hours prior to
decompression and subsequently measured neurological recovery. Ambulation was restored
when the spinal cord was decompressed before the six hour mark. At 24 hours, motor function
was slightly impaired and at 72 hours, the rat remained paraplegic [21].

20
Speidel et al. recently investigated behavioural outcomes in rats while looking at the combined
effects of velocity and residual compression in a dislocation model. Injury velocities of 5 mm/s
and 500 mm/s were varied along with compressive durations of 24 mins and 240 mins. A fixed
dislocation displacement and residual compression depth of 1.45 mm and 0.8 mm were used
respectively. The findings suggested that increased velocity led to increased behavioural deficits
however the effect of decompression had no effect [24]. These studies on residual compression
suggested that minimizing spinal canal occlusion was important in minimizing SCI severity
while early decompression saw mixed results.
1.6 Spinal Cord Finite Element Model
The majority of biomechanical SCI animal experiments are primarily focused on correlating
mechanical parameters such as mechanisms of injury, injury depth, injury velocity and duration
of compression with the extent of injury [16], [17], [19]–[22], [24], [38], [39]. Computational
models such as finite element models complement experimental work when studying SCI
biomechanics as they provide insight into how mechanical stresses and strains are distributed
within the spinal cord following impact. This links spinal cord impact with spinal cord damage
therefore associating tissue damage distributions with specific pathologies [4]. In order to
understand computational modeling, the basics of finite element modeling will briefly first be
explained.
1.6.1 Finite Element Modeling
Finite element modeling is a computational engineering analysis tool used to evaluate the
structural mechanics of materials in terms of mechanical stresses and strains. Stress is defined as
force per unit area while strain is defined as normalized deformation through a material
respectively. This method discretizes a continuous material into a set of elements connected at
nodes. These elements are small enough such that the mechanical behaviour of the material is
well described. The model computes stresses and strains at each node describing nodal
behaviour. This determines the stresses and strains within the material. Given that this thesis
focuses on experimental work as opposed to finite element modeling, the mathematics behind
finite element theory will not be discussed.

21
1.6.2 Constitutive Models
The approximation of internal stresses and strains from finite element modeling is dependent on
the constitutive material model of the structure. Specific to nervous tissue, linear elastic, non-
linear elastic, linear viscoelastic, quasi-linear viscoelastic (QLV), non-linear viscoelastic,
poroelastic, isotropic, and transversely isotropic models have been used [4], [5], [40], [41]. Each
of these models describe how stresses relate to strains.
A linear elastic model is the most common model used for engineering materials. It has
described materials such as metal as well as biological tissue such as bone. It uses a linear
relationship to relate stress and strain by the material’s elastic modulus (E). This is shown by the
equation below.
𝜎 = 𝐸𝜖 (1)
Bulk modulus (K) is an extension of elastic modulus describing a solid or fluid’s resistance to
compression in three dimensions. It is defined as the decrease in volume of a material
(volumetric strain) due to the increase in pressure (volumetric stress) surrounding the material. It
has been used to describe the compressibility of brain grey and white matter tissue [53]–[55].
This is shown by the following equation.
𝑃 = −𝐾(𝑉𝑛 − 𝑉𝑜)
𝑉𝑜 (2)
Where P is the applied pressure, Vo is the original volume of a material, and Vn is the reduced
volume of a material from the applied pressure.
Non-linear elasticity is used to describe a material that exhibits a non-linear relationship between
stress and strain. There are several non-linear material models that exist such as hyperelasticity
and elastoplasticity. An example of a non-linear model that has been used to describe several
biological tissues such as ligament, tendon, and spinal cord is shown below [42]–[44].
𝜎 = 𝐴(𝑒𝐵𝜖 − 1) (3)
Where A, and B are material constants and stress is represented by an exponential function of
strain.

22
Viscoelasticity describes a material that exhibits time dependent properties. These materials
exhibit both viscous (fluid) and elastic (solid) behaviour. Creep and stress relaxation are common
loading protocols that can be used to characterize viscoelasticity. Creep refers to a protocol
where a constant stress is applied resulting in strain increasing over time. In contrast, stress
relaxation refers to a protocol where strain is applied (loading phase) and then held constant
(relaxation phase). The applied strain leads to increased stress while the holding phase leads to
decreased stress over time.
There are many existing models that describe viscoelastic materials. Linear viscoelastic models
correspond to materials undergoing small strain where stress varies linearly with strain. It uses
Boltzmann’s superposition principle which states that all incremental stresses and strains are
additive. The complete stress at any time (σ(t)) is obtained by integrating all strain increments
from time zero to time t, over all dꞇ increments. This results in the following integral.
𝜎(𝑡) = ∫ 𝐺(𝑡 − 𝜏)𝑑𝜖(𝜏)
𝑑𝜏𝑑𝜏
𝑡
0
(4)
Where G(t) is the relaxation function.
Linear viscoelastic models are inadequate at characterizing soft tissues. This is due to the non-
linear relationship between stress and strain and the larger strains found in mechanical testing of
soft tissues. In these cases, non-linear viscoelasticity is used.
Non-linear viscoelasticity can be described using both a QLV model and a fully nonlinear
viscoelastic model. QLV models have been widely used to describe the viscoelastic behaviour of
several soft tissues in the literature [8], [41]–[48]. This formulation assumes the time dependent
and elastic portion of the mechanical behaviour as separable. This results in a time dependent
relaxation phase, and a strain-dependent loading phase as shown in the following equation.
𝜎(𝜖, 𝑡) = ∫ 𝐺(𝑡 − 𝜏)𝑡
0
𝜕𝜎𝑒(𝜖)
𝜕𝜖
𝜕𝜖(𝜏)
𝜕𝜏𝑑𝜏 (5)
Where, 𝜎𝑒(𝜖) is the stress corresponding to an instantaneous strain during a uniaxial loading
phase and 𝐺(𝑡) is the reduced relaxation function (where G(0) = 1) during the relaxation phase.
Often a first order exponential such as Equation (3) can be used to illustrate the shape of the
loading response while a 3-term Prony series (Equation (6)) consisting of decaying exponential

23
functions can be used to illustrate the shape of the relaxation response of biological soft tissue
[8], [41]–[48].
𝐺(𝑡) = 1 − ∑ 𝑔𝑖(1 − 𝑒−
𝑡
𝜏𝑖)
3
𝑖=1
(6)
Where 𝑔𝑖 are the relaxation moduli corresponding to 𝜏𝑖 time constants in the relaxation phase.
The strain history 𝜖(𝑡) for stress relaxation commonly applies a ramp strain followed by holding
of the maximum strain. This is modeled by the following piecewise function.
𝜖(𝑡) = {𝜖̇𝑡, 𝑓𝑜𝑟 0 < 𝑡 < 𝑡0
𝜖̇𝑡0, 𝑓𝑜𝑟 𝑡 ≥ 𝑡0 (7)
Where 𝜖̇ is the strain rate, 0 < 𝑡 < 𝑡0 represents the loading portion, and 𝑡 ≥ 𝑡0 represents the
hold portion of the strain profile.
Equations (3), (6), (7) can be substituted into Equation (5) and integrated over both loading and
hold portions of the strain profile to describe the non-linear viscoelastic behaviour of spinal cord
tissue.
The difference between the QLV and a fully nonlinear viscoelastic model is the relaxation
modulus is both strain and time dependent [49]. This is shown by the two equations below.
𝜎(𝜖(𝑡), 𝑡) = ∫ 𝐺(𝜖(𝜏), 𝑡 − 𝜏)𝑡
0
𝜕𝜖(𝜏)
𝜕𝜏𝑑𝜏 (8)
𝐺(𝜖, 𝑡) = 𝐺∞(𝜖) + ∑ 𝐺𝑖(𝜖)𝑒−
𝑡
𝜏𝑖
3
𝑖=1
(9)
Where 𝐺∞(𝜖) represents the strain-dependent long term modulus and 𝐺𝑖(𝜖) represents the strain-
dependent moduli corresponding to 𝜏𝑖 time constants.
Poroelastic models describe the viscoelastic behaviour of biphasic materials containing both
solid and fluid phases (ie. porous materials) where specific knowledge of fluid flow is desired. It
is traditionally used to characterize cartilage tissue but has been extended for use in brain tissue
due to its porous nature [40], [50], [51]. The model assumes the solid phase to be elastic and
incompressible. The interstitial fluid phase is assumed to be incompressible. Viscoelasticity is

24
then described by the solid-fluid interaction of both phases [52]. During a stress relaxation
protocol involving compression, the fluid phase is exuded from the tissue as strain is applied.
This allows the solid phase to compact due to its porous nature. While the strain is held, the fluid
remaining in the tissue redistributes within the interstitial spaces leading to an equilibrium state.
As a result, this model is a function of permeability and the aggregate modulus of the tissue.
Permeability describes the relative fluid motion with respect to the porous solid matrix. It
indicates how slowly or quickly stress relaxation occurs. A lower permeability means a lower
exudation rate yielding higher stresses and a slower relaxation and vice-versa [50]. Aggregate
modulus describes the equilibrium stiffness of the tissue.
Isotropy and transverse isotropy refers to whether or not a material exhibits directional
properties. Isotropic materials have uniform properties in all directions whereas anisotropic
materials do not. Transverse isotropy is a subset of anisotropy. These materials exhibit uniform
properties in the local sagittal, and coronal planes and different properties in the transverse plane.
Grey and white matter tissue are hypothesized to exhibit isotropic and transversely isotropic
material properties respectively [11], [41], [56], [57].
1.6.3 Spinal Cord Computational Models
Various constitutive models have been combined and tested using computational finite element
models to investigate internal stress and strain distributions within the spinal cord [4]–[8], [58].
Stress and strain distributions reveal highly concentrated areas which may correlate with
localized tissue damage allowing one to establish a stress and/or strain based injury criterion.
Computational models and their outputs are completely dependent on their underlying material
properties. This was shown in two studies that compared their finite element outputs with tissue
damage in animal SCI models. Maikos et al. and Russell et al. both used a non-linear viscoelastic
constitutive model to characterize the spinal cord however there were many assumptions to their
models. Viscoelastic properties were taken from brain tissue material properties, differences
between grey and white matter properties were omitted, and isotropy of the spinal cord was
assumed [4], [5]. Maikos et al. modeled a weight drop contusion experiment in rats and observed
a stronger correlation with grey matter tissue damage (R2=0.84) than white matter tissue damage
(R2=0.56) when correlated with maximum principal strain [4]. Russell et al. modeled the

25
contusion and dislocation experiments performed by Choo et al.’s study and showed satisfactory
correlations with tissue damage and maximum principal strain. A stronger correlation was found
for contusion (R2=0.86) than dislocation (R2=0.52) injury mechanisms. Grey matter tissue
damage showed a stronger correlation (R2=0.93) while white matter tissue damage correlations
varied depending on the white matter region (0.38 < R2 < 0.96) with maximum principal strain
[5]. It is likely that the lack of conclusive spinal cord material properties led to decreased
biofidelity in these computational models.
In order to increase the reliability of these computational models, recent research has identified
the importance of using separate grey and white matter properties and the inclusion of their
anisotropy [8]. In this study, Jannesar et al. compared a spinal cord finite element model with
histological analysis of tissue damage sustained from a contusion experiment in a non-human
primate (NHP) [8]. This finite element model used distinct material property combinations for
both grey and white matter and are shown in Table 1-1.
Table 1-1: Material property combinations for modeling the spinal cord in finite element
simulations adapted from Jannesar et al. [8]
Model A Model B Model C*
Different grey and white
matter properties
Different grey and white
matter properties
Same grey and white matter
properties
Anisotropic white matter Isotropic white matter Isotropic white matter
Isotropic grey matter Isotropic grey matter Isotropic grey matter
* Identical to the one used in Maikos et al. [4]
The three proposed models above led to substantial differences in strain distributions when
modeled with a finite element simulation. These distributions as well as the resultant tissue
damage observed from the histological analysis are shown in Figure 1-16.

26
Figure 1-16: Maximum principal strain distribution of various material property
combinations for the grey and white matter tissue using Model A (a), Model B (b), Model C
(c). The resultant tissue damage from the NHP contusion injury was stained using
histological analysis (d). This figure was adapted from Jannesar et al. [8]. Reprinted with
permission
The key characteristics of tissue damage from the histology were: the sparing of contralateral
white matter from the impactor site, and the sparing of peripheral white matter underneath the
impactor. Of the three models, model A most closely resembles this case however it is still not
ideal. The magnitude of maximum principal strain observed in model A varies as it propagates
throughout the spinal cord and it is not yet clear whether this translates into an injury criterion
for grey and white matter tissue damage seen in the histology. Model B showed elevated strains
on the contralateral side where there was no tissue damage from histology. Model C
underestimated the tissue damage at the impactor site [8]. This study reinforces the need for
accurately quantifying the material properties of both grey and white matter tissues within the
spinal cord.
1.7 Spinal Cord Mechanical Properties
The mechanical properties of spinal cord grey and white matter tissues have been measured in
several ways in past studies. These different methods have shown that spinal cord tissue
properties are sensitive to several experimental variables. This includes strain rate, time post-
mortem, sample orientation, loading type (ie. compression, tension, shear), material composition
(intact spinal cord, grey matter, white matter), pre-conditioning, species, pre-load, and spinal
level [8], [11], [41]–[43], [47], [56], [57], [59]–[63]. The intact spinal cord is defined as having

27
its dura mater excised but its pia mater intact. Prior to understanding the mechanical properties of
the spinal cord, the relevant types of loading will first be explained.
1.7.1 Loading Types
The mechanical behaviour of the spinal cord was first studied in tension. Tensile deformation is
produced by stretching the spinal cord tissue axially. Both in-vivo and ex-vivo tensile testing of
the intact spinal cord has been performed. The in-vivo studies used multiple sets of rings placed
around the spinal cord with the help of cyanoacrylate adhesive [64]–[66]. The ex-vivo studies
clamped the extremities of the spinal cord between two rigid clamps (ie. plates or pipes) with the
help of cyanoacrylate adhesive [42]–[44], [59], [63], [67]. To perform the test, one end of the
spinal cord is fixed while the other end is displaced axially. Longer tissue lengths are required
for tensile testing as squeezing spinal cord tissue at the extremities introduces undesirable stress
concentrations. If the tissue length was short, this boundary condition will influence the
structural behaviour of the tissue.
The mechanical behaviour of spinal cord white matter tissue has been previously characterized
using unconfined compression. Unconfined compression compresses spinal cord tissue axially
between two rigid parallel platens and allows for lateral expansion of the sample [41], [47]. The
tissue sample needs to possess an aspect ratio opposite to that of tensile testing as the tissue
should not buckle during the test.
Compression of spinal cord tissue can also be performed using confined compression however
this has not been done. Both brain and cartilage tissue have been studied using confined
compression [40], [51], [52], [68], [69]. This loading type places the tissue in a 1D deformation
(uniaxial) state (Figure 1-17). The tissue is placed within a confining chamber possessing rigid
walls on three surfaces. This prevents radial expansion along the side walls unlike in unconfined
compression. A non-porous indenter is used to compress the specimen. The outer diameter of the
indenter is matched as close as possible with the internal diameter of the confining chamber to
create a sliding fit between both mating parts. This tight tolerance prevents expansion of the
tissue at this interface as well. A porous filter is placed below the specimen. Given the biphasic
nature of the tissue, as the tissue is compressed, the fluid exudes through the porous filter
allowing for deformation of the solid phase. The porosity of the filter is selected such that only
the fluid phase is allowed to flow through and not the solid phase.

28
Figure 1-17: Confined compression schematic. The tissue is represented by the dark grey
block applying the reaction force on the nonporous metal indenter. The variable d(t)
represents a displacement controlled actuator that applies a displacement onto the
nonporous indenter deforming the tissue. Reprinted with permission [69]
Indentation measures the local compressive mechanical properties of tissue. It uses a spherical
indenter to compress the tissue sample to prescribed depths. The difference between indentation
and unconfined/confined compression is that the indenter does not cover the full cross-sectional
area of the tissue. It has been used to study grey and white matter tissue [11], [56].
Pipette aspiration measures localized mechanical properties of tissue by applying negative
pressure to aspirate the tissue [60]. The tissue deformation produced using this method was
shown to be comparable to that of tensile deformation [70]. The pipette is connected to a vacuum
pump. The vacuum pump applies negative pressure to the system allowing the pipette to aspirate
the tissue during the experiment. The pipette was used to selectively aspirate both grey and white
matter tissues measuring their mechanical properties [60].
Shear measures the mechanical properties of tissue using mediolateral deformation. There are
currently no studies that have performed shear on the spinal cord. It uses two parallel plates
similar to unconfined compression. Instead of axial deformation, the plates apply mediolateral
deformation. To ensure that no slip occurs between the plate and specimen, cyanoacrylate
adhesive, and/or sand paper are used. Pre-compression of the tissue during the experimental
setup is also required to ensure that the plates are in contact with the specimen. Although it has

29
been previously used to study brain tissue, it has not been used to study spinal cord tissue [57],
[71].
Each loading type deforms the material in a different manner allowing one to investigate the
tissue structure’s sensitivity to different loading types. In the literature, these types of loading
were applied to deform the intact spinal cord, grey matter, and white matter tissue to measure
their respective mechanical properties.
1.7.2 Intact Spinal Cord Mechanical properties
The intact spinal cord’s mechanical properties in tension have been measured both in-vivo and
in-vitro [42]–[44], [65]–[67]. Sample data is shown in Figure 1-18 and the key experimental
parameters are shown in Table 1-2. The in-vivo studies were conducted in puppies and cats. The
stress-strain curves revealed slight strain-stiffening behaviour when small strains were applied.
During the unloading of the spinal cord, hysteresis was observed indicating that the spinal cord
exhibits viscoelastic properties [65], [66].
The in-vitro studies collected spinal cords post-mortem from humans, rats, and pigs. Spinal cords
were tested within 1 hour, 8 hours, and 24 hours for the pig, rat, and human studies respectively
[42]–[44], [67]. Hysteresis was not measured in these studies as a stress relaxation protocol was
used instead. Similar to the studies performed by Hung et al., the spinal cord exhibited a non-
linear stress-strain response with stiffness increasing with increasing strain. Additionally all of
these studies observed the effect of strain rate whereby increasing strain rate increases stiffness
[42]–[44]. For rat and pig studies, peak stress was used as a surrogate for elastic modulus.

30
Figure 1-18: Sample Stress-strain data from several studies of spinal cord mechanical
properties in tension [72]. Reprinted with permission.

31
Table 1-2: Key parameters used in the literature investigating intact spinal cord
mechanical properties [42]–[44], [65]–[67], [73]. The shaded cells indicate that the author(s)
did not measure that quantity.
Author Hung et
al., 1981
Bilston et
al., 1996
Fiford et
al., 2005
Clarke et
al., 2009
Sheteye et
al., 2014
Ramo et al.,
2018
Species Cat, Dog Human Rat Rat Pig Pig
Loading
Type
Tension Tension Tension Tension Tension Tension
Strain rate 0.021
mm/s
0.068 –
0.21 s-1
0.002 –
0.02 s-1
0.002 – 2
s-1
0.1s-1 0.1s-1
Strain 2% 10% 2 – 5% 2 – 5% 1 – 5% 1 – 5%
Time Post-
Mortem
In-vivo 24 hrs 8 hrs 8 hrs 1 hr In-vivo
Intact Spinal Cord
Peak Stress
(kPa)
60 – 190 15 – 75 5 – 15 70 30
Elastic
Modulus
(kPa)
258, 265 1020 –
1370
Equilibrium
Stress (kPa)
50 – 150 15 – 50 2.5 – 8 18 - 35 12 - 22
Time
constant (s)
234 376 83 100 100
Viscoelasticity of the intact spinal cord was described as non-linear viscoelastic [42]–[44], [67],
[73]. The time dependent properties revealed the tissue relaxing to an equilibrium stress in all
studies. The applied strain had a direct correlation on the equilibrium stress with increased strain
leading to increased equilibrium stress. The relaxation behaviour was described using time
constants (ꞇ) within the Prony series. For simplicity’s sake, only the final time constant (ꞇ) is
reported in Table 1-2 as it describes the time it takes for the tissue to relax to an equilibrium. The
relaxation time constants in the majority of these studies were determined from fitting the Prony
series but the majority were reported as non-unique solutions [42]–[44]. Shetye et al., and Ramo

32
et al. reported unique solutions demonstrating that an apparent equilibrium stress was reached
after 100 secs [67], [73]. A limitation to these two studies was that 100 secs of relaxation was not
indicative of the equilibrium behaviour of the spinal cord.
Time post-mortem between euthanasia and mechanical testing has been proposed to affect the
mechanical properties of the intact spinal cord [62], [73], [74]. This may explain the wide range
of peak stress and equilibrium stress results seen in Table 1-2 between ex-vivo and in-vivo
studies. Ramo et al. showed that the time independent and dependent mechanical properties of
the spinal cord change as early as 60 mins after death. The ex-vivo time independent properties
showed greater stiffness than the in-vivo properties. The ex-vivo time dependent properties
showed greater relaxation than the in-vivo properties [73]. Oakland et al., performed tensile
testing on spinal cord tissue using post-mortem times of 3, 24, 48, and 72 hours. They
demonstrated that the tangent modulus of the tissue increased by 15%, 50%, 60%, and 95%
respectively as signs of tissue breakdown and degeneration [62]. Garo et al. performed a similar
study using brain tissue where it was found that the elastic modulus was constant up to a
threshold time of 6 hours, after which the stiffness increased at a rate of 0.45 Pa per minute [74].
These studies provide one possible explanation as to why the human spinal cord peak stress and
aggregate modulus were significantly higher than other studies.
The strain stiffening behaviour observed was an exponential curve and is analogous to that of
collagen fibres under tension. Collagen fibres are known to be initially wavy until fully
straightened out at which point they bear load, thus explaining the exponential phenomenon [75].
This may indicate that axons within the spinal cord may not be fully load bearing until a certain
load is reached. For instance, the axons in the white matter are organized in tracts running
rostralcaudally but the axons within the grey matter are randomly oriented and wavy.
Heterogeneities like this may introduce slack in the spinal cord initially before becoming fully
load bearing. Moreover these studies left the pia mater intact. This is a sheath that is made of
connective tissue and possesses collagen fibres, therefore contributing to the phenomenon
described herein [76].
The effect of pia mater was observed to have a significant effect on the overall stiffness of the
spinal cord structure [77]. One study compared the elastic moduli of spinal cord tissue with pia
mater attached and unattached. To remove the effect of the pia mater, circular incisions were

33
made on the pia mater so that it was discontinuous along its length. The results showed that the
effect of pia mater led to an elastic modulus that was over 10 times stiffer than without it [77].
This shows that the pia mater plays an important structural role in the spinal cord. This study also
provides the need to further investigate the mechanical properties of the spinal cord in terms its
constituents (ie. grey and white matter tissue).
1.7.3 Spinal Cord Grey Matter and White Matter Mechanical properties
The mechanical properties of grey and white matter within the spinal cord are controversial.
Some researchers have found the grey matter to be stiffer than the white matter [11], [59], [63],
one has found the white matter to be stiffer than the grey matter [58] and one saw no difference
between the two [60].
Table 1-3 highlights key parameters used for comparing grey matter and white matter
mechanical properties. Similar to the intact spinal cord, several mechanical variables influenced
the mechanical properties of the grey and white matter tissue during ex-vivo testing. It was noted
that four of six studies shown in Table 1-3 reported completing their mechanical tests within 6
hours of euthanasia.

34
Table 1-3: Key parameters used in the literature to compare grey and white matter
properties from the literature [11], [41], [47], [59], [60], [63]. The shaded cells indicate that
the author(s) did not measure that quantity.
Author Ichihara et
al., 2001
Ichihara et
al., 2003
Ozawa et
al., 2001
Koser et al.,
2015
Sparrey et
al., 2011
Jannesar et
al., 2018
Species Cow Cow Rabbit Mouse Pig NHP
Loading Type Tension Tension Pipette
Aspiration
(Tensile)
Indentation Unconfined
compress-
ion
Unconfined
compression
Strain rate 0.05 s-1 0.0003 –
0.03 s-1
1 cm
H20/s
0.02 s-1 0.005 – 5 s-1 0.3 – 77 s-1
Strain 5 - 40% 10 - 30% 5 cm H20 0.4 – 0.7% 40% 45%
Time Post-
mortem
Not
specified
Not
specified
1 hr 6 hrs 4 hrs 1 hr
Grey Matter
Peak Stress
(kPa)
42 3 – 34
Elastic
Modulus (kPa)
166* 64 – 112* 3.3 0.127
Equilibrium
Stress (kPa)
1 – 13
Time constant
(s)
White Matter
Peak Stress
(kPa)
26 3 – 19 0.8 – 3.9 7 – 21
Elastic
Modulus (kPa)
94* 30 – 64* 3.2 0.067
Equilibrium
Stress (kPa)
1 – 5 2 0.5
Time constant
(s)
54 2
*Tangent modulus was measured in the linear region of the loading curve

35
The time independent properties for grey and white matter exhibited similar trends to the intact
spinal cord described earlier. The stress strain relationship of both grey and white matter tissue
exhibited a strain stiffening curve regardless if the tissue was in tension or compression. Strain
rate was also directly correlated with increased peak stress [41], [47], [59].
The time dependent properties for grey and white matter also exhibited similar trends to the
intact spinal cord. Grey and white matter tissue showed immediate relaxation when the
maximum strain was held. The behaviour was described as non-linear viscoelastic [41], [47],
[59]. The behaviour showed that increased overall strain led to increased equilibrium stress [59],
[63]. It also characterized the relaxation behaviour using several time constants. The final time
constants are reported in Table 1-3. It was not specified whether these solutions were unique and
so interpretations of these time constants will not be made.
Grey and white matter tissue equilibrium stress was observed to be minimally affected by strain
rate. This was not observed in the intact spinal cord. In tensile studies, equilibrium stress
remained unchanged despite applied strain rates that were two orders of magnitude apart [59]. In
compressive studies which were only performed for white matter, it remained unchanged despite
using strain rates that were two to three orders of magnitude apart [41], [47]. A limitation to this
analysis was that the relaxation times in these studies were held for only 60 – 100 secs which
may not be fully indicative of the equilibrium behaviour of the tissue.
The compressive strain stiffening behaviour of spinal cord tissue cannot be explained using the
collagen theory proposed earlier. It has been hypothesized that axons in nervous tissue act
similarly to collagen fibres in tendons or ligaments such that fibres carry negligible load in
compression [8], [78]. Instead biphasic theory can be used to explain this phenomenon. This
theory is well established in the cartilage community for explaining strain stiffening behaviour
[79]–[81]. The spinal cord is in fact a porous biphasic structure. It is composed of both solid
(neurons, axons, glial cells) and fluid phases (CSF, blood plasma). One study measured the
spinal cord to have a wet weight of 66% [82] while another study measured brain tissue to have a
wet weight of 82% [51], indicating that the solid-fluid interaction within nervous tissue is an
important consideration. As the spinal cord tissue is initially compressed, the flow of interstitial
fluid escapes through the permeable solid matrix. As further compressive strain continues, there
is a decrease in permeability within the tissue as the solid matrix compacts on itself and the pores

36
shrink in size. This increases the flow resistance of the interstitial fluid leading to higher stresses
required to compress the tissue [40], [80]. During the relaxation phase, the solid matrix
compaction is held and the fluid redistributes within the tissue resulting in stress relaxation until
an equilibrium is reached [79].
The results of in-vivo and ex-vivo tissue properties comparing grey and white matter concluded
different results. Most studies involving ex-vivo tissue testing indicated that grey matter is stiffer
than white matter based on their elastic modulus and peak stress according to Table 1-3 [11],
[59], [63]. A recent study by Sharkey et al., revealed that white matter was twice as stiff as grey
matter [58]. The difference in this study was that the results collected were modeled after an in-
vivo animal model contusion study conducted previously [83]. The method used an inverse finite
element approach whereby the mechanical properties of the spinal cord tissues were estimated
based on the deformation seen within the grey and white matter. The deformation was recorded
using MRI images taken during the actual contusion injury of the animal [58]. Although peak
stress nor elastic modulus were directly measured, the relative properties between the grey and
white matter were estimated. It is likely that these results differ than that of ex-vivo studies due to
the effect of time post-mortem, and the higher strain rates used. A limitation to this study was the
resolution of the MR images made it difficult to precisely characterize the deformation of both
grey and white matter tissue.
Sharkey et al.’s study was the first to report white matter to be stiffer than grey matter in the
spinal cord. Comparing this study with brain tissue mechanical properties, it is consistent with
Feng et al.’s ex-vivo study where white matter was found to be stiffer than grey matter in shear
and indentation [56]. However Prange & Margulies also performed shear on brain tissue and
observed that grey matter was stiffer than white matter [57]. These inconsistencies in both spinal
cord and brain tissue literature highlight the need to further investigate grey and white matter
mechanical properties.
1.7.4 Spinal Cord Grey Matter and White Matter Anisotropy
Spinal cord tissue anisotropy has not been studied often and is often neglected. This is surprising
as other biological tissues possessing a distinct fibre orientation were found to have anisotropic
mechanical properties. The directional nature of spinal cord white matter (Figure 1-10) suggests

37
that anisotropy may play an important role in the mechanical properties of the spinal cord. The
few key studies summarizing this topic are discussed below.
Galle et al. first modeled the spinal cord white matter as transversely isotropic. Quasi-static axial
tensile tests were performed on white matter and were characterized using different theoretical
mathematical models (ie. strain energy density functions). Two distinct strain energy functions
were used to characterize the experimental data. The first was an isotropic material model
whereas the second augmented the first model with a function that represented the contribution
of the axons [84]. The latter proved to be a better fit than the former indicating that white matter
likely behaves like a transversely isotropic material in tension.
Jannesar et al. conducted a similar study to Galle et al. that expanded on the former study’s
findings. The strain energy function here was conditional depending on whether the white matter
tissue was loaded in compression or tension. In compression the model described an isotropic
material whereas in tension it switches to a transversely isotropic model. This was to incorporate
the mechanical contribution of axons in tension while ignoring them in compression. This model
was shown to accurately characterize various white matter compression and tension studies
within the literature indicating that white matter likely behaves like a transversely isotropic
material [8], [47], [59].
In the same study, Jannesar et al. tested various spinal cord grey and white matter material
combination models in a finite element simulation. Theycompared their results to a contusion
injury on a NHP to further assess the validity of transverse isotropy in white matter tissue. This
was illustrated in Table 1-1 and Figure 1-16. To reiterate, Model A which accounted for the
white matter’s transverse isotropy most closely resembled the features observed in the in-vivo
injury revealing that accounting for white matter anisotropy resulted in better correlations with
tissue strain distributions [8].
The studies conducted by Galle et al. and Jannesar et al. proposed theoretical models to describe
white matter anisotropy but did not involve experimental testing of specimens in different
directions. A literature search revealed only two studies that experimentally evaluated the
directional properties of spinal cord grey and white tissue [11], [60]. In these studies grey matter
was tested in two orthogonal orientations while white matter was tested with axon fiber direction
parallel and perpendicular to the applied load. An anisotropy ratio between transverse and axial

38
directions was included to quantify the degree of anisotropy that exists between orthogonal
directions. These results are shown in Table 1-4.
Table 1-4: Key parameters used in the literature to compare grey and white matter
anisotropy properties from the literature [11], [60].
Author Ozawa et al., 2001 Koser et al., 2015
Species Rabbit Mouse
Loading Type Pipette Aspiration (Tensile) Indentation
Strain rate 1 cm H20/s 0.02 s-1
Strain 5 cm H20 0.4 – 0.7%
Grey Matter
Axial Transverse Sagittal Axial Transverse Sagittal
Elastic Modulus (kPa) 3.4 3 3.5 0.125 0.128 0.127
Anisotropy Ratio 0.9 1.0
White Matter
Axial Transverse Sagittal Axial Transverse Sagittal
Elastic Modulus (kPa) 3.4 3.5 2.8 0.048 0.075 0.077
Anisotropy Ratio 1.0 1.6
The results suggested that grey matter behaved like an isotropic material as its anisotropy ratio
was approximately equal to one. White matter displayed mixed results with one study suggesting
that it behaved like an isotropic material (anisotropy ratio equal to one) and the other suggesting
that it behaved like an anisotropic material (anisotropy ratio not equal to one).
There are limitations to the study by Ozawa et al. as their test protocol involved aspiration of
tissue while the spinal cord was still intact. It was not clear whether the meninges were removed
prior to testing. This confounds the results as it was seen earlier that the pia mater had an impact
on the stiffness of the spinal cord.
The study by Koser et al. is consistent with the transversely isotropic theoretical model proposed
by Galle et al. and Jannesar et al. above. For white matter, both transverse and sagittal planes

39
displayed identical elastic moduli while the axial plane showed a significantly lower elastic
modulus. This reaffirms that axons bear negligible load in compression. For grey matter, it is
hypothesized as isotropic as it consists of randomly oriented axons, dendrites and neurons. These
distinct features are consistent with the tissue structures seen in Figure 1-8 and Figure 1-10 [11].
There is a limitation to the study by Koser et al.. Although these studies used isolated grey and
white matter tissue samples unlike Ozawa et al., it was performed at the cellular level. This may
not be indicative of SCI where bulk tissue deformation is often encountered [11]. This is
important as the mechanical properties of the tissue may more likely be governed by the
extracellular matrix than the cells themselves during SCI.
A literature review of mechanical anisotropy in brain grey and white matter was included to
supplement the scarcity of spinal cord tissue data presented in Table 1-4. Here the test protocols
were similar to that used for spinal cord tissue. Brain grey matter was tested in two orthogonal
orientations and brain white matter was tested with axon fiber direction parallel and
perpendicular to the applied load. Table 1-5 summarizes the anisotropy ratio for both grey and
white matter tissue within the brain. Although loading type and outcome variable (ie. peak stress,
shear modulus, elastic modulus) differ from study to study, anisotropy ratio is a dimensionless
quantity allowing for comparisons to be made between studies.
Table 1-5: Brain anisotropy ratio in the literature, categorized by loading type [56], [57],
[71], [85]. The shaded cells indicate that the author(s) did not measure that quantity.
Study Loading Type Grey Matter White matter
Prange & Margulies, 2002 Shear 1.0 0.7
Feng et al., 2013 Shear 1.0 0.6
Indentation 1.0 2.4
Budday et al., 2017 Tension 0.7
Compression 1.7
Schmidt et al., 2017 Shear 0.8
Magnetic Resonance Elastography
(MRE)
0.8

40
It is evident from the data in Table 1-5 that grey matter exhibits isotropic properties and that
white matter exhibits anisotropic properties in the brain. Interestingly, white matter was observed
to exhibit different mechanical properties depending on the loading type that was applied. White
matter was stiffer when shear was applied parallel to the axons as opposed to perpendicular to
the axons. This was also true for when axons were loaded in tension. On the contrary, the
opposite was true when a compressive load was applied parallel to the axons. This is consistent
with the models proposed previously explaining that axons carry negligible load in compression
[8], [11]. The findings shown in brain tissue studies further reinforce the need to investigate the
directional properties of spinal cord grey and white matter.
1.7.5 Gap in literature
There is a need to better understand the mechanical properties of spinal cord grey and white
matter in terms of tissue type and direction. There is little consensus on whether grey matter is
stiffer than white matter or vice-versa. Furthermore, few researchers have examined the
directional properties of both tissue types. Lastly, the spinal cord’s mechanical response to
confined compression has not been studied.
1.8 Thesis
1.8.1 Research Question
This study aims to provide an understanding to answer the following research question:
“What is the effect of tissue type (grey matter vs. white matter) and the effect of direction (axial
direction vs transverse direction) on the mechanical properties of the spinal cord under confined
compression.”
1.8.2 Thesis Objectives
The objectives for this thesis were:
1) To design and build a confined compression apparatus capable of individually testing
spinal cord grey and white matter tissue;
2) To characterize the non-linear viscoelastic nature of spinal cord grey and white matter
tissue in confined compression using a constitutive model;

41
3) To examine the effect of tissue type, direction, and their interaction on the mechanical
properties of spinal cord grey and white matter in confined compression.
1.8.3 Hypotheses
The hypotheses for this thesis are:
1) Grey matter will exhibit a larger stiffness than white matter regardless of direction in
confined compression;
2) Grey matter will exhibit isotropic properties (ie. Anisotropy ratio = 1) in confined
compression;
3) White matter will exhibit anisotropic properties (ie. Anisotropy ratio ≠ 1) with stiffness
greater in the transverse direction relative to its axial direction in confined compression.
1.8.4 Scope
The current study will investigate the mechanical properties of the spinal cord grey and white
matter by conducting ex-vivo tissue testing in a porcine model immediately following euthanasia.
The confined compression apparatus will be designed and integrated with an electromagnetic
actuator. This apparatus will test four individual sample types: grey matter axial direction, grey
matter transverse direction, white matter axial direction, white matter transverse direction. A
stress relaxation protocol and a constitutive model will be used to quantify the time independent
and dependent mechanical properties. This study will involve a 2x2 factorial design investigating
the effects of tissue type and direction on the mechanical properties of the spinal cord. Lastly
following mechanical testing, histology will be conducted to qualitatively verify the grey and
white matter tissues that were tested.

42
Chapter 2: Methods
2.1 Mechanical Design of the Biopsy Punch & Confined Compression
Apparatus
The overall goal of the design was to collect spinal cord tissue and measure its mechanical
properties in confined compression. Due to the lack of an apparatus capable of performing
confined compression within the OIBG lab, the following design criteria were developed to
guide the mechanical design process of a new confined compression apparatus.
1) To collect four spinal cord tissue samples of grey and white matter in different
orientations from the pig spinal cord;
2) To maintain the orientation of the tissue sample after collection from the spinal cord and
for mechanical testing;
3) To minimize tissue degradation from post-mortem effects;
4) To test the spinal cord tissue with a stress relaxation protocol to measure its time
independent and time dependent properties. This protocol consists of:
a. A quasi-static strain rate followed by holding of the peak strain and
b. Measuring the loading and relaxation behaviour of the tissue;
5) To measure the mechanical properties of the tissue with high repeatability.
The final mechanical design consisted of two components: a custom biopsy punch and a
confined compression apparatus. The custom biopsy punch addressed design criteria numbers
one to three. Its integration with a confined compression apparatus addressed design criteria
numbers four and five. All computer-aided design (CAD) models were drafted using Solidworks
(2017, Dassault Systems, Concord, MA). The engineering drawings are included in Appendix A.
2.1.1 Biopsy Punch Design
The custom biopsy punch was a novel biopsy punch design modeled after an off the shelf skin
biopsy punch. The literature demonstrated that off the shelf skin biopsy punches were effective
for collecting isolated spinal cord tissue samples [41], [47]. Their effectiveness is a product of
their sharpened circular blade whereby twisting and punching motions are able to cut spinal cord
tissue.

43
The design for the custom biopsy punch consisted of three individual elements that were the
handle, adapter, and punch tube (Figure 2-1). The punch tube (New England Small Tube,
Litchfield, NH) was 2 mm nominal diameter and was sharpened at one end for cutting. This
punch tube was welded within the adapter, and the handle was threaded into the adapter.
Figure 2-1: Custom biopsy punch. The punch tube was welded within an adapter and was
threaded onto a handle.
The 2 mm diameter punch tube was selected based on the available amount of grey and white
matter tissue in their different orientations. Four samples were collected: grey matter axial (GA),
grey matter transverse (GT), white matter axial (WA), and white matter transverse (WT).
Although the pig spinal cord measured approximately 6 mm in diameter, the maximum diameter
of tissue samples available was 2 mm. This served as a design constraint to maintain as much
homogeneity as possible within the collected tissue samples. Maintaining homogeneity meant
preventing contamination of grey matter tissue samples with white matter tissue and vice-versa.
Figure 2-2 highlights the approximate spinal cord tissue location of where samples were
collected.

44
Figure 2-2: Cross-section of the spinal cord showing grey matter axial (GA) (a), grey
matter transverse (GT) (b), white matter axial (WA) (c), and white matter transverse (WT)
(d) specimens. The circle and rectangle illustrate specimens that are ollected axially
(through the page) and transversely (across the page) respectively. The sample dimensions
denoted by the circles and rectangles are roughly to scale. The amount of grey and white
matter in the spinal cord is specific to the spinal cord region (cervical, thoracic, and
lumbar). As such the image may not accurately reflect the amount of grey and white matter
observed in the spinal cord tissue used in this study. The image is adapted from Polarlys –
CC by SA 3.0
Figure 2-2 shows that the biopsy punch is able to collect the four specified specimen types thus
meeting the first design criteria. The rationale for collecting these four specimens types were to
compare the mechanical properties between tissue type and direction. The axial direction
denoted tissue samples parallel with the axial (rostralcaudal) direction, whereas transverse
direction denoted tissue samples collected perpendicular to the direction of the axons.
The second and third design criteria were met by the custom biopsy punch’s removable feature.
The adapter can be removed from the handle and integrated within the confined compression
apparatus. This feature allowed the adapter to be re-used as the vessel for performing confined
compression. During preliminary work with spinal cord tissue, a standard skin biopsy punch was

45
used. The tissue sample had to be transferred out of the punch and into another vessel for
mechanical testing. The transferring led to a lack of containment around the tissue resulting in
tissue degradation. Spinal cord tissue samples without their pia mater were observed to collapse
under their own weight. During the transfer the specimen was also able to rotate in space leading
to a loss of specimen orientation. These reasons provided justification for the biopsy punch
design. By keeping the tissue within the punch tube, the punch tube walls preserved its structure
and orientation prior to mechanical testing.
2.1.2 Confined Compression Apparatus Design
The confined compression apparatus was designed to model the confined compression schematic
shown in Figure 1-17. It incorporated identical components that were the nonporous indenter, a
confining chamber, and a porous filter. The goal of the apparatus was to integrate the biopsy
punch adapter within it since the spinal cord tissue was left within the biopsy punch tube. This
led to the following design concept meeting the fourth design criteria (Figure 2-3).
Figure 2-3: Confined compression schematic of tissue sample. A sectional view of the
adapter is shown illustrating key components involved in confined compression. The
specimen shown is approximately to scale.

46
The concept used the biopsy punch tube walls as the confining chamber for the spinal cord
tissue. The biopsy punch tube was positioned vertically so that it sat flush with a porous filter
below it. This meant that the spinal cord tissue within it would also be positioned on top of the
porous filter. A nonporous indenter was inserted into the biopsy punch tube from above. This
nonporous indenter was connected to an actuator that applied uniaxial deformation to the spinal
cord tissue. A load cell was mounted beneath the porous filter to measure the mechanical
behaviour of the spinal cord tissue.
2.1.1.1 Confined Compression Apparatus Overview
The confined compression apparatus (Figure 2-4) consisted of four components: an
electromagnetic actuator (TestBench ELF LM-1, TA Instruments, New Castle, DE), a magnetic
end effector, a nonporous indenter, and a confined compression fixture. The overview for this
apparatus will be described from the bottom up.

47
Figure 2-4: Confined compression apparatus with key components labeled. The
electromagnetic actuator was mounted above the confined compression fixture. The
magnetic end effector was threaded into the actuator. The nonporous indenter is not shown
in this figure due to its small size. It is shown in Figure 2-6 instead.
2.1.1.2 Confined Compression Fixture
The confined compression fixture (Figure 2-5) was designed to position the specimen so that
uniaxial deformation of the specimen occurred. It incorporated the confining chamber, porous
filter, and load cell elements from Figure 2-3. The entire fixture was placed underneath the
actuator. The biopsy punch adapter was placed within the adapter holder. This positioned the
biopsy punch tube containing the spinal cord tissue vertically. The adapter holder could be
lowered and raised vertically using the Z-axis translation table. This lowered the biopsy punch
tube against the porous filter (PN#: 9446T32, McMaster Carr, Aurora, OH) below it. The porous
filter was placed in a filter holder which sat atop a 10 N load cell (Sensotec 31E, Honeywell
Corp., Columbus, OH).

48
Figure 2-5: Confined compression fixture with parts labeled. This fixture was machined by
the British Columbia Cancer Agency machine shop.
2.1.1.3 Load Cell Sizing
The load cell used in this design was selected based on peak stresses measured in Haslach et al.’s
confined compression study of brain tissue. The measured force was calculated using their stress
criterion and the 2 mm diameter specimen geometry in this study. Haslach et al. measured peak
stresses ranging from 16 kPa – 171 kPa [51]. This resulted in measured peak forces of 0.05 N –
0.6 N for this work. This amounted to 0.5% - 6% of a 10 N load cell’s full scale capacity. In
theory, it would be better to use a 1 N load cell however static weight which included the
adapter, porous filter, and filter holder were placed on top of the load cell. This static weight
weighed 71 g (0.7 N). With the added weight, the operating range was between 7.5% – 13% of
the load cell’s full scale. As a result, the 10 N load cell (Sensotec 31E, Honeywell Corp.,
Columbus, OH) was selected.

49
2.1.1.4 Nonporous Indenter
The nonporous indenter consisted of a carbon steel disc, a head piece and a shaft (Figure 2-6).
The carbon steel disc possessed the same diameter as the head piece. It was attached to the head
piece with tape along the circumference of both parts. The shaft was welded within the head
piece. The diameter of the shaft (New England Small Tube, Litchfield, NH) was sized to be a
sliding fit (<0.05mm) with the biopsy punch tube. The nonporous indenter was inserted into the
biopsy punch adapter from above.
Figure 2-6: Nonporous indenter with parts labeled. The welding was performed by the
British Columbia Cancer Agency machine shop.
While it was being inserted, a spacer was added to initially support the nonporous indenter. The
nonporous indenter was supported to avoid premature compression of the spinal cord tissue
within the biopsy punch tube during setup and prior to mechanical testing (Figure 2-7). A folded
piece of cardboard was sufficient to support the weight of the spacer.

50
Figure 2-7: The nonporous indenter was inserted into the adapter and initially supported
with a spacer to avoid contact with the specimen.
The tolerance between the nonporous indenter and punch tube of the adapter was minimized by
the manufacturer to prevent any fluid and/or tissue extrusion through this interface. Gervaso et
al. performed a computational study on a non-specific biphasic soft tissue (elastic modulus = 0.5
MPa) to study the effect of a gap existing between the nonporous indenter and the confining
chamber. They showed that a 2% gap was directly correlated with 2% error in aggregate
modulus and 6% error in permeability for up to 25% strain in the soft tissue [86]. The percentage
gap for the design presented in this study was calculated with the following equation.
% 𝑔𝑎𝑝 =𝑑𝑐𝑜𝑛𝑓𝑖𝑛𝑖𝑛𝑔 𝑐ℎ𝑎𝑚𝑏𝑒𝑟 − 𝑑𝑛𝑜𝑛𝑝𝑜𝑟𝑜𝑢𝑠 𝑖𝑛𝑑𝑒𝑛𝑡𝑒𝑟
𝑑𝑐𝑜𝑛𝑓𝑖𝑛𝑖𝑛𝑔 𝑐ℎ𝑎𝑚𝑏𝑒𝑟∗ 100 (10)
Where d represents the diameter of both the confining chamber and the nonporous indenter. The
gap for this design was calculated to be a maximum of 2.3%. Relative to other confined
compression studies of brain tissue, and cartilage, this was within the range of 0.12% - 3.5%
which has been reported previously [51], [68], [87]. It was important to note that this gap cannot

51
be removed. Otherwise, the nonporous indenter will not move smoothly in relation to the biopsy
punch tube.
2.1.1.5 Magnetic End Effector
The magnetic end effector was mechanically threaded into the actuator above. It consisted of an
extended shaft with a magnetized tip (Figure 2-8) at the distal end. The magnetic tip was
constructed with a carbon steel plate, magnet, a steel washer, and 3/8” carbon steel ball. The
carbon steel plate was glued onto the distal end of the shaft. The magnet was placed on the
carbon steel plate. The steel washer was placed on the magnet, and the carbon steel ball was
seated on the washer. The purpose of the washer was to prevent the ball from rolling around.
Figure 2-8: Magnetic end effector with parts labeled.
2.1.1.6 Actuator
The electromagnetic actuator (TestBench ELF LM-1, TA Instruments, New Castle, DE) was
controlled by WinTest7 Software (EnduraTEC, Penetanguishene, ON, Canada) with a
proportional-integrative-derivative controller, and an internal linear variable differential

52
transformer (LVDT, EnduraTEC, Model 310111, Penetanguishene, ON, Canada). The actuator
was mounted on an elevator shaft. This elevator was driven by a servomotor and adjusted the
physical height of the actuator. The actuator was responsible for applying uniaxial deformation
to the spinal cord tissue within the biopsy punch tube using the magnetic end effector and the
nonporous indenter.
2.1.1.7 Design Feature #1: Connection between the Nonporous Indenter and the Magnetic End
Effector
In order for deformation to be applied, the nonporous indenter sitting in the biopsy punch tube
below needed to be connected to the actuator above. However the nonporous indenter and the
magnetic end effector were initially disconnected. This design was necessary in order to mitigate
alignment issues that were identified during proof of concept testing. Initially the nonporous
indenter was mounted directly onto the actuator above and was carefully guided into the
confining chamber below. This introduced two alignment issues resulting in long precarious
setup times. First there was the need to perfectly align the nonporous indenter above with the
confining chamber below. This was difficult due to the tight tolerance between the indenter and
the confining chamber. Second, it was necessary to ensure that the actuator above was perfectly
leveled. Any tilt introduced unwanted transverse and frictional forces between the indenter and
the confining chamber.
In order to mitigate the alignment issues discussed, the nonporous indenter was connected to the
actuator above by the magnetic attraction between the magnetic end effector and nonporous
indenter (Figure 2-9). To enable this connection to the actuator, the actuator was physically
lowered until the nonporous indenter was in close proximity with the magnetic end effector.
Once the nonporous indenter was attached to the actuator, the spacer was removed.
This design feature had two advantages. It solved the issue of perfect concentric alignment as the
nonporous indenter was already guided within the confining chamber. Second, the ball point
contact guaranteed only uniaxial forces were transmitted onto the nonporous indenter. This
solved the leveling issue of the actuator as transverse forces will not be introduced.

53
Figure 2-9: Magnetized connection between the magnetic end effector and the nonporous
indenter. The magnetized steel ball and the nonporous indenter were initially disconnected
from each other. To use, the steel ball was lowered until it attracted the nonporous indenter
below at which point the spacer was removed. Since the nonporous indenter was already
constrained within the bore of the adapter, the alignment issue was mitigated.
2.1.1.8 Design Feature #2: Tissue Leakage Prevention
Preliminary trials showed tissue leakage between the punch tube and porous filter when the
nonporous indenter compressed the tissue. The design intended for the punch tube to sit flush
with the porous filter providing an impermeable seal at this interface. However asperities were
formed at the porous filter and punch tube interface resulting in tissue leakage.
To address this issue, a square profile O-ring (PN#: 1170N15, McMaster Carr, Aurora, OH) was
inserted around the outer diameter of the punch tube to provide a seal at this interface (Figure
2-10). It was placed prior to lowering the adapter against the porous filter (Figure 2-11a). The
tolerance between the internal diameter of the O-ring and the external diameter of the punch tube
was +0.035mm making it easy to slide on by hand. To ensure the O-ring provided a tight seal,

54
the adapter holder was lowered further after the biopsy punch tube contacted the porous filter to
compress the O-ring (Figure 2-11b). This added compression filled the crevices forming an
impermeable seal at this interface.
Figure 2-10: The schematic from Figure 2-3 was updated to show the placement of the
square profile O-ring. This prevented tissue leakage from occurring between the porous
filter and the biopsy punch tube interface.

55
Figure 2-11: The square profile O-ring was first slipped onto the punch tube prior to
lowering the biopsy punch tube (a). Once the punch tube was lowered, the adapter holder
was further lowered until it contacted the O-ring and compressed it against the porous
screen (b).
Although the added compression of the O-ring was successful with sealing the interface, its
viscoelastic load-relaxation behaviour was measured by the load cell. The O-ring exhibits
viscoelastic properties given that it is made of rubber. This brought the need to introduce a
stabilization protocol. Before beginning each test, the entire system was left to stabilize from
compression of the O-ring. This meant that the rubber was allowed to relax to an equilibrium
before initiating compression on the spinal cord tissue. This was done to avoid confounding the
mechanical properties of the rubber with the tissue.
The stabilization protocol was proven successful through several air tests. The procedure for
these air tests involved no compression of tissue. The O-ring was first compressed with a pre-
compression of 0.6 N and then allowed to relax to an equilibrium state. An equilibrium state was
reached when the load cell measurement did not fluctuate beyond +/-0.015 N over a couple of
minutes. The nonporous indenter was then prescribed a displacement to verify whether any
forces would result throughout the stroke of the actuator. It was observed that the load cell did

56
not measure any load behaviour from the O-ring. The results for this test are shown in Appendix
B.
2.1.2 Verification of the Load Cell Accuracy
To ensure the accuracy of load cell, it was necessary to calibrate the load cell with standard
weights prior to data collection. Standard weights were chosen based on the measuring range for
this study. It was estimated earlier that 7.5% - 13% of the load cell’s full scale will be used in the
experiments. As such, three standard weights of 50 g, 100 g, and 150 g equating to 5%, 10%, and
15% of the load cell’s full scale were used. Each mass was measured using the load cell and the
error was computed with the following equation.
𝐸𝑟𝑟𝑜𝑟 % =|𝑚𝑡𝑟𝑢𝑒 − 𝑚𝑚𝑒𝑎𝑠𝑢𝑟𝑒𝑑|
𝑚𝑡𝑟𝑢𝑒∗ 100% (11)
Where 𝑚𝑡𝑟𝑢𝑒 and 𝑚𝑚𝑒𝑎𝑠𝑢𝑟𝑒𝑑 were the true and measured weights as described above. All
measurements were tabulated and shown in Appendix C. The error measured was approximately
+3%, meaning the load cell overestimated the true weight. As a result the voltage gain factor
originally applied to relate force and voltage was decreased by this amount.
2.1.3 Verification of the Confined Compression Apparatus Repeatability
The repeatability of the mechanical design was measured and validated to meet the fifth design
criteria. For this, an inert surrogate material (QM Skin 30) was used in place of spinal cord
tissue. This was a silicone elastomer that was previously developed in the OIBG lab as a
surrogate spinal cord. This material was chosen as it exhibited a similar compressive stiffness
(elastic modulus = 0.20 MPa) to that of in vivo animal spinal cords [88].
The repeatability analysis involved repeated confined compression of the silicone specimen. To
prepare the specimen, a 2 mm cross-section of the silicone spinal cord was cut using a scalpel.
The custom biopsy punch was then used to core out a specimen. The adapter was integrated into
the confined compression apparatus and the silicone was compressed repeatedly using the same
parameters.
The variability between repeated confined compression tests of the same silicone specimen was
measured in this repeatability analysis. The rationale for re-using the same silicone specimen was
to maintain the same geometric imperfections within the specimen throughout each test. To

57
ensure that previous stress-strain history within the material did not affect each successive test,
the specimen was allowed to relax for at least 30 mins between tests. Coefficient of variation
(COV) was used as a metric to measure the variability between tests. It was calculated with the
equation below. The maximum peak stress COV was found to be between 4 – 6%, which was
deemed acceptable. The results are shown in Appendix D.
𝐶𝑂𝑉 =𝑆𝑡𝑎𝑛𝑑𝑎𝑟𝑑 𝐷𝑒𝑣𝑖𝑎𝑡𝑖𝑜𝑛
𝑀𝑒𝑎𝑛 (12)
It was recognized that silicone was not a porous biphasic material like spinal cord tissue.
However repeatable peak stresses were achieved using an inert material. This demonstrated that
the confined compression apparatus was capable of measuring results with precision.
2.1.4 Pilot Test Validation for Mechanical Design
There were several pilot tests performed prior to finalizing the design of the custom biopsy
punch and confined compression apparatus discussed in Section 2.1.1 and 2.1.2. These were
necessary to confirm the validity of individual components to the design. These pilot tests
ensured:
1) That tissue did not clog the porous filter in confined compression;
2) That the load cell and LVDT used were capable of measuring the tissue’s time
independent and dependent properties.
2.1.4.1 Porous Filter
The porosity of the porous filter needed to be sized to allow fluid but not tissue flow. The
literature demonstrated that confined compression of brain tissue could lead to tissue clogging
the porous filter due to its soft nature [40]. A 20 micron and a 40 micron porous filter were
trialed as these were previously used by Haslach et al. [51]. The sizing refers to the pore size of
the filter indicating the largest particle size that can pass through. A pilot test (Figure 2-12)
involving the following setup was used to verify the appropriate filter size.

58
Figure 2-12: Pilot test for testing the permeability of various screens
The pilot test involved several components to replicate the confined compression setup in Figure
1-17. An acrylic disc was drilled through its centre using a 2 mm diameter drill bit to be used as
the confining chamber. A small container was used to hold the porous screen so that the acrylic
disc can be placed on top. The tissue was collected using a skin biopsy punch and then
transferred into the acrylic disk. The 2 mm drill bit used to bore the hole was turned upside down
so that the flat end could be used as the nonporous indenter to compress the tissue. This allowed
for a tight tolerance fit between the nonporous indenter and the confining chamber.
The filter was verified under a microscope following tissue compression. It was observed that no
tissue clogged the 20 micron filter while the 40 micron filter showed residue within the pores of
the filter. As a result the 20 micron screen was selected for the final design of the confined
compression apparatus.
2.1.4.2 Measuring Time Independent and Dependent Properties of Spinal Cord Tissue
The second pilot study verified the LVDT and load cell’s sensitivity to measuring the time
independent and dependent properties of spinal cord tissue. In other words, the instrumentation
needed to measure a strain-stiffening behaviour during its loading phase followed by immediate
relaxation when subjected to a displacement profile involving a linear ramp strain followed by
the peak strain being held.

59
A proof of concept confined compression apparatus (Figure 2-13) was used. It was adapted from
the components used in Figure 2-12. There were three differences to the setup. The first was that
a 10 N load cell was attached to the base of the apparatus. The second was that the porous filter
was squeezed between two pieces of acrylic using a set of two screws and nuts. This was to
prevent any fluid or tissue from escaping between the confining chamber and the porous screen
interface. Lastly, instead of the drill bit, a nonporous indenter was threaded onto the
electromagnetic actuator above and guided into the confining chamber so that deformation could
be applied.
Figure 2-13: Pilot test apparatus for measuring the time independent and dependent
properties of spinal cord tissue. The electromagnetic actuator (a) and the proof of concept
confined compression fixture (b) are shown.
Spinal cord tissue was obtained using a skin biopsy punch and was transferred into the specimen
holder. The results of the pilot test were positive. Both strain stiffening behaviour and stress
relaxation behaviour were observed. The parameters used were a quasi-static strain rate
(0.001/sec) up to 25% peak strain followed by holding of the peak strain for 300 secs. The
displacement-time and stress-time curves were plotted in Figure 2-14. The peak stress observed
was in the same range of values reported by Haslach et al. thus validating the accuracy of the
instrumentation used.

60
Figure 2-14: Displacement vs. time graph (top) and Stress vs, time graph (bottom) of pig
spinal cord white matter tissue
2.2 Spinal Cord Sample Preparation
For the experiments to address the thesis objectives, spinal cords were harvested from the
thoracic and cervical regions (C5-C7, T5-T7, and T10-T14) of freshly euthanized Yorkshire and
Yucatan pigs (21.5 – 48 kg) with the help of Dr. Brian Kwon’s lab group at the UBC Centre for
Comparative Medicine (CCM). It was noted that the majority of pigs underwent acute SCI at
either the T2 or T10 level as part of the research conducted by their lab. Euthanasia of pigs after
SCI varied between 2 hours – 3 months after SCI. The spinal cord used for this study was
harvested at least two spinal levels away from the injury epicentre.
The dura mater was removed with surgical scissors by the animal surgeon immediately after
euthanasia (Figure 2-15). The intact spinal cord was placed in a vial filled with phosphate-
buffered saline (PBS) solution. The vial was then placed in a Styrofoam cooler filled with ice
and transported back to ICORD for further processing. The travel time required was
approximately 30 mins.

61
Figure 2-15: The intact spinal cord with dura mater excised. A ruler is placed in proximity
for scaling purposes to show length (a) and diameter (b). The thoracic spinal cord is the
smaller one compared to the neighbouring cervical spinal cord
The spinal cord was cut to produce the four types of specimens (GA, GT, WA, and WT).
Although both cervical and thoracic spinal cord regions were collected, no distinction in sample
preparation was used to differentiate between spinal cord region. This was decided because the
effect of spinal cord region was not analyzed in this study. There were two cutting techniques
used to collect specimens. The first technique was used to collect GA and WA specimens while
the second technique was used to collect GT and WT specimens.
The GA and WA specimens were prepared by following these steps. The spinal cord was
removed from the vial onto a flat plate with demarcated lines (Figure 2-16). Since the spinal cord
provided was typically quite long, the spinal cord was first cut to a length of 15 mm using a #10
scalpel blade. This was simply for ease of handling the tissue. The remaining segment was
temporarily placed back in the PBS filled vial for use later. A custom 3D printed “cross-section”
cutting cradle was used to cut 2.5 mm nominal thickness cross-sections. This cutting cradle
featured a scalpel guide line so that the spinal cord could be butted against the wall for a more
repeatable cut (Figure 2-16).

62
Figure 2-16: An aluminum plate with demarcated lines was used to reduce the length of the
spinal cord. The “cross-section” cutting cradle (shown in black) was used to assist with
cutting cross-sections. The finished product is shown on the left hand side.
A flash freezing protocol was used to freeze spinal cord cross sections prior to collecting the GA
and WA specimens. Flash freezing was shown in the literature to reduce specimen geometry
variation during cutting and sectioning procedures without compromising the mean mechanical
response of the tissue [89], [90]. To do this, the spinal cord cross section was transferred on a
sheet of aluminum foil and placed into a Styrofoam cooler of dry ice for 60 secs.
After flash freezing, it was immediately placed on a piece of foam and the custom biopsy punch
was used to core the specific GA or WA specimens. The location for the WA and GA samples
were the lateral white matter and the ventral horn of the spinal cord respectively. The foam
provided a soft surface such that the punch could be pushed through the spinal cord without
dulling its blade. Once collected, the specimen was left within its respective punch and placed
aside for 10 mins to thaw [89]. After the thawing process, it was integrated within the confined
compression fixture for mechanical testing.
The GT and WT specimens were prepared by following a similar procedure to GA and WA
specimens. The spinal cord was cut to 4 mm lengths using the same demarcated aluminum plate.
This section of spinal cord was flash frozen following the same procedure above and then placed
in the “separator” cutting cradle (Figure 2-17). This cradle featured scalpel guidelines to separate
the centrally located grey matter from the lateral white matter. The guidelines were spaced to
yield sections of 2.5 mm nominal thickness. The lateral white matter sections or the central grey

63
matter section were then placed flat on the foam to collect GT and WT specimens using the
custom biopsy punch. Similarly, the specimens were left to thaw before integrating it within the
confined compression apparatus.
Figure 2-17: The "separator" cutting cradle is used to separate the lateral white matter
from the central grey matter
It was important to note that the pia mater remained on the WT specimen. It was not possible to
remove the pia mater beforehand as it was observed to keep the spinal cord intact while cutting.
If the pia mater was removed at an earlier stage, the tissue was observed to liquefy resulting in
tissue degradation. This introduced unnecessary geometric variation when the WT specimen was
prepared. As a result, it was necessary to leave the pia mater intact throughout the specimen
preparation process.
To eliminate the effect of the pia mater, the custom biopsy punch collected the WT specimen by
cutting from the lateral side of the tissue through to the medial side. In doing so, the position of
the pia mater was placed superiorly in the punch tube. This was crucial as the nonporous indenter
and porous filter are located above and below the specimen respectively. Since the interface
between the nonporous indenter and the tissue was theoretically impermeable, it was assumed
that the pia mater would have no effect on the overall test if it was located here. However if the
pia mater interfaced with the porous filter, the porosity of the pia mater, which is likely different
from that of white matter tissue, may prevent fluid exudation. This may also result in clogging of

64
the filter. Ultimately, this would negatively affect the measured mechanical properties for the
WT specimen.
After the tissue was collected, a flattened tip toothpick was used to measure the height of the
specimen within the biopsy punch (Figure 2-18). It was inserted through the superior end of the
adapter until it contacted the specimen within. A pen was used to mark the toothpick at the same
height or parallel to the superior surface of the adapter. A digital caliper was then used to
measure the length of toothpick that was immersed within the adapter. The height of the
specimen was calculated by subtracting the measured toothpick length from the overall length of
the adapter. The accuracy of this spinal cord sample preparation method yielded an average
specimen height of 2.8 ± 0.5 mm (mean±SD).
Figure 2-18: A toothpick was inserted through the custom biopsy punch and marked to
denote the specimen height (2.8 ± 0.5 mm)
2.3 Confined Compression Testing Protocol
2.3.1 Time Post-Mortem Criterion
The mechanical testing of each pig spinal cord was completed within six hours of euthanasia.
This criterion was established to limit the effect of time post-mortem on the mechanical
properties of spinal cord tissue. The six hours included the time to harvest the spinal cord, to
transport the tissue to ICORD from CCM, to prepare the four sample types, and mechanical
testing of each sample type.
Preliminary tests revealed that 8-12 specimens could be tested within the six hour window.
Given that there were four types of specimens, this resulted in two to three specimens (ie. data
points) per specimen type. Due to the lack of multiple data points, averages of GA, GT, WA, and
WT specimen data points were calculated per specimen type per porcine specimen. This helped

65
reduce the impact from outliers within each specimen type and helped maintain a balanced
design for the statistical analysis.
2.3.2 Test Order
A block design for test order chronology was used to help further minimize the effect of time
post-mortem. Grey and white matter specimen blocks were formed for determining the test
sequence. Each pig spinal cord was divided into two blocks. Each block contained all four types
of specimens.
Block 1 grouped the four types of samples by tissue type. This meant that both grey matter
samples (GA and GT) were tested before both white matter (WA and WT) samples or vice-versa.
Block 2 grouped the four types of samples by tissue type but the sequence of the sample
direction was opposite to that of Block 1. For example, if GA then GT were tested in block 1,
then GT and GA would be tested in block 2. This applied to white matter samples as well. An
example test order is shown in Table 2-1. The permutations were rearranged for every successive
porcine specimen tested. The complete testing order for all porcine specimens is found in
Appendix E.
Table 2-1: Example specimen testing order in a six hour window
Trial Block Pig #1
1 1
GA
2 GT
3 WA
4 WT
5 2 WT
6 WA
7 GT
8 GA

66
2.3.3 Sample Size
A power analysis determined the number of porcine specimens required for testing. The
calculated number represented the minimum sample size required to detect whether an effect can
be detected between sample populations. The effects that were analyzed with this study were the
effect of tissue type (ie. grey matter vs. white matter) and direction (ie. axial vs transverse) on
spinal cord mechanical properties.
The power analysis depended on three factors: type I error (α), type II error (β) and effect size.
Type I error was the chance of mistakenly rejecting the null hypothesis (false negative) while
type II error was the chance of mistakenly accepting the null hypothesis (false positive). The
effect size (d) was “the degree to which the null hypothesis is false” [91]. In the context of this
research, the null hypotheses were:
1) There was no difference between grey and white matter tissue mechanical properties;
2) There was no difference between GA and GT specimen mechanical properties;
3) There was no difference between WA and WT specimen mechanical properties;
The analysis assumed the following α and β values:
𝛼 = 0.05
𝛽 = 0.2
The effect size (Equation (13)) was estimated based on similar studies conducted in the literature
[57]. The three null hypotheses meant that three separate effect size calculations were
individually performed (ie. one for each null hypothesis). Null hypothesis #3 was used as an
example here The data for the calculation is shown in Appendix F.
𝑑 =|𝜇𝑊𝐴 − 𝜇𝑊𝑇|
𝑆𝐷𝑡𝑜𝑡𝑎𝑙 (13)
𝑆𝐷𝑡𝑜𝑡𝑎𝑙 = √(𝑛𝑊𝐴 − 1)𝑆𝐷𝑊𝐴
2 + (𝑛𝑊𝑇 − 1)𝑆𝐷𝑊𝑇2
𝑛𝑊𝐴 + 𝑛𝑊𝑇 − 2 (14)

67
Where 𝜇 represented the mean stiffness between WA and WT specimens, 𝑆𝐷𝑡𝑜𝑡𝑎𝑙 represented
the pooled standard deviation of both WA and WT specimens, 𝑛𝑊𝐴 and 𝑛𝑊𝑇 represented the
respective WA and WT sample sizes in the study.
The sample size (N) was calculated with Equation (15) [92]. The t distribution chart was used as
the true standard deviation for GA, GT, WA, and WT populations were unknown. The number
of samples required for null hypotheses #1, #2, and #3 were 9, 17, and 11 respectively. Based on
pig availability, a sample size of 11 was chosen for this study.
𝑁 ≥
2 (𝑡1−𝛼
2− 𝑡𝛽)
2
𝑑
(15)
2.4 Experimental Protocol
For the confined compression test, the adapter containing the spinal cord specimen was first
inserted into the adapter holder. The O-ring was then inserted around the punch tube. The
adapter holder was lowered until the punch tube contacted the porous filter using the Z-axis
translation table. The adapter holder was further lowered to compress the O-ring until the load
cell measured approximately 0.6 N of compression. A spacer was placed atop the adapter, and
the nonporous indenter was inserted into the punch tube. The actuator was lowered using the
servo-driven elevator until it magnetically attracted the nonporous indenter. This prompted the
removal of the spacer. Finally the system was left to stabilize. This meant that the O-ring was
allowed to relax to an equilibrium prior to starting the test.
While the system was stabilizing, the parameters for the mechanical test were set. The data was
sampled at 10 Hz and filtered using a low pass filter at 30 Hz. After stabilization, a pre-load of
0.02 N was applied to establish contact between the specimen and the nonporous indenter. No
pre-conditioning was used for this protocol. A strain profile involving a quasi-static strain rate
(0.001/sec) up to a maximum of 10% peak strain was applied. Immediately after, the maximum
strain was held for 120 secs. This stress relaxation protocol was repeated for all spinal cord
specimens.
Several adapters were fabricated allowing spinal cord specimens to be collected in advance. This
allowed continuous testing by swapping out the previous adapter at the end of one test with the

68
following adapter for the next test. Once the new adapter was inserted into the adapter holder, the
steps described previously were repeated. This mechanical design allowed for a quick
changeover between adapters.
The time between tests was approximately 20 mins. The bottleneck of the experimental setup
had to do with the stabilization step needed to remove the mechanical behaviour of the O-ring.
This ensured that the load cell measured only the mechanical behaviour of the spinal cord tissue.
2.5 Constitutive Modeling
All data files collected from each porcine spinal cord were averaged with respect to the four
spinal cord specimen types. The GA, GT, WA, and WT averaged data were then processed using
MATLAB (R2018a, Mathworks, Natick, MA) for constitutive modeling. A QLV model was
used to describe viscoelastic nature of GA, GT, WA, and WT spinal cord specimens [8], [41]–
[48].
The QLV theory modeled stress relaxation mechanical behaviour. The experimental protocol in
Section 2.4 used a ramp deformation followed by holding of the maximum deformation as
described in Equation (7). The first order exponential function (Equation (3)) described the non-
linear strain-stiffening behaviour of the tissue. A 1-term Prony series described the relaxation
behaviour of the tissue (Equation (16))
𝐺(𝑡) = 1 − 𝑔 (1 − 𝑒−𝑡
𝜏) (16)
Equations (3), (7), (16) were substituted into Equation (5) and integrated over the duration of the
experiment. The hand calculations are shown in Appendix G, and the final solutions describing
the stress at any time are shown below.
𝜎(𝑡) = 𝐴𝐵𝜖̇ ((1 − 𝑔
𝐵𝜖̇𝑒𝐵�̇�𝑡 +
𝑔𝑒𝐵�̇�𝑡
𝐵𝜖̇ +1
𝜏
) − (1 − 𝑔
𝐵𝜖̇+
𝑔𝑒−𝑡
𝜏
𝐵𝜖̇ +1
𝜏
))
𝑓𝑜𝑟 0 ≤ 𝑡 < 𝑡0
(17)

69
𝜎(𝑡) = 𝐴𝐵𝜖̇ ((1 − 𝑔
𝐵𝜖̇𝑒𝐵�̇�𝑡0 +
𝑔𝑒(𝐵�̇�+1
𝜏)𝑡0𝑒−
𝑡
𝜏
𝐵𝜖̇ +1
𝜏
) − (1 − 𝑔
𝐵𝜖̇+
𝑔𝑒−𝑡
𝜏
𝐵𝜖̇ +1
𝜏
))
𝑓𝑜𝑟 𝑡 ≥ 𝑡0
(18)
2.5.1 Parameter Optimization
The four parameters (A, B, g, ꞇ) in the constitutive model above were determined through a non-
linear least squares error minimization algorithm (Equation (19)) [48]. This approach required an
initial estimate of the parameter values and iteratively minimized the error between the
experimental data and the value of the analytical model from Equations (17) and (18) at every
time point where a data point was collected. As the algorithm iterated, the error was constantly
optimized (ie. reduced to the smallest error possible), until the parameter values converged to a
set of final values.
𝑀𝑖𝑛(𝐸𝑟𝑟𝑜𝑟) = ∑ [𝜎𝑗𝑒𝑥𝑝(𝑡𝑗) − 𝜎𝑗
𝑚𝑜𝑑𝑒𝑙(𝑡𝑗)]2
𝑡0
𝑡𝑗=0
+ ∑ [𝜎𝑘𝑒𝑥𝑝(𝑡𝑘) − 𝜎𝑘
𝑚𝑜𝑑𝑒𝑙(𝑡𝑘)]2
𝑡𝑒𝑛𝑑
𝑡𝑘=𝑡0
(19)
Where the superscript “exp” represented the data points from the experimental data and “model”
represented the data points from the analytical model using the most recent parameter estimation.
This minimization algorithm was performed using Matlab’s fmincon function. This was a
constrained optimization function. It applied the following constraints to facilitate the
optimization process.
1) Upper and lower variable bounds
a. Amax = 2000 kPa, Bmax = 100, gmax = 1, ꞇmax = 100 secs
b. Amin = 0 kPa, Bmin = 0, gmin = 0, ꞇmin = 0 secs
2) Inequality constraints
a. A > 0 , B > 0, g < 1

70
A sensitivity analysis was conducted to verify the convergence of the algorithm based on the
constraints used. The constraints were varied several times. Despite this, the analysis converged
to the same set of final values each and every time. The complete MATLAB script used to
perform constitutive modeling and parameter optimization is shown in Appendix H.
2.5.2 Outcome Variables
The outcome variables collected from the constitutive modeling were peak stress, aggregate
modulus, and time constant. Peak stress described the time independent properties of the tissue
while aggregate modulus and time constant described the time dependent properties of the tissue.
Peak stress was defined as the maximum stress measured during testing (ie. where maximum
strain occurred). Aggregate modulus (Ha) was defined as the stiffness at equilibrium when the
test ended. It was calculated using the following equation.
𝐻𝑎 =𝜎𝑒𝑞𝑢𝑖𝑙𝑖𝑏𝑟𝑖𝑢𝑚
𝜖𝑒𝑞𝑢𝑖𝑙𝑖𝑏𝑟𝑖𝑢𝑚 (20)
Where 𝜎𝑒𝑞𝑢𝑖𝑙𝑖𝑏𝑟𝑖𝑢𝑚 and 𝜖𝑒𝑞𝑢𝑖𝑙𝑖𝑏𝑟𝑖𝑢𝑚 were the stress and strain at equilibrium respectively. In
order to calculate the stress at equilibrium, Equation (18) was simplified with the condition that
time (t) approaches infinity resulting in the following equation.
𝜎𝑒𝑞𝑢𝑖𝑙𝑖𝑏𝑟𝑖𝑢𝑚 = 𝐴𝐵𝜖̇ (1 − 𝑔
𝐵𝜖̇(𝑒𝐵�̇�𝑡0 − 1)) (21)
Time constant (ꞇ) was defined as the time taken for the specimen to relax 63% from its peak
stress. This was a characteristic of the 1-term Prony series equation. It was computed from the
constitutive model fit. Time constant was directly related to the overall relaxation time behaviour
of the tissue. A larger time constant meant a longer relaxation time was required for the tissue to
reach equilibrium.
2.6 Statistical Methods
2.6.1 Effect of Tissue Type and Direction
The three outcome variables were analyzed using SPSS (v.24, IBM Corporation, Armonk, NY)
statistical software. The Shapiro Wilks test was used to test for normality and the Levene’s test
was used for homogeneity of variances. A significance level of p<0.05 was used in all cases. A

71
two-way analysis of variance (ANOVA) was used to analyze all parametric data. The
independent variables for this study were tissue type (grey matter & white matter) and direction
(axial & transverse directions). The dependent variables for this study were peak stress,
aggregate modulus, and time constant.
The data were presented in a 2x2 factorial design. This meant that no post-hoc tests were
necessary for any statistical significances found between main effects. For statistical
significances found for the interaction effects, the simple main effects were tested using pairwise
comparisons with Bonferroni adjustment.
2.6.2 Effect of Time Post-Mortem
The relationship between peak stress and time post-mortem was analyzed with a linear
regression model for GA, GT, WA, and WT specimens. This was performed using Microsoft
Excel (2013). A significance level of p<0.05 was used for this analysis.
2.7 Histological Methods
Following mechanical testing, every specimen was removed from the biopsy punch, and fixed
with 10% neutral buffered formalin for 24 hours prior to submerging it in 30% sucrose solution
for 72 hours for cryoprotection. Specimens were then transferred into moulds and immersed in
optimal cutting temperature (OCT) compound before freezing on dry ice. The moulds were
organized such that each mould contained only one specimen type per pig. As a result, GA, GT,
WA, and WT specimens were placed in their respective moulds. In total there were four moulds
per porcine specimen tested. Specimens within each mould were aligned such that 20 μm cross-
sections were cut on the cryostat. Once the slides were prepared, they were placed in a -80oC
freezer.
All sections were stained with hematoxylin and eosin (H&E). This process began with drying
and thawing of the slides. The slides were rehydrated with xylene for 10 mins, followed by a
descending series of ethanol concentrations (EtOH, 100%, 100%, 95%, 70%) for 3 mins each.
Finally slides were placed in distilled water for 6 mins completing rehydration. For staining, the
slides were placed in hematoxylin (Sigma-Aldrich, St. Louis, MO) for 5 mins, rinsed in tap water
for 3 mins, placed in acid ethanol (0.5% HCl in 70% EtOH) for 10 secs, rinsed in tap water for 3
mins, placed in sodium bicarbonate (NaHCO3, 1.5%) for 5 secs, rinsed in tap water for 3 mins,

72
placed in 95% EtOH for 2 mins and finally placed in Eosin (Fisher Healthcare, Waltham, MA)
for 15 secs. The slides were dehydrated with an ascending series of ethanol concentrations
(EtOH, 95%, 100%, 100%) for 2 mins each and then with xylene for 4 mins. The full staining
procedure is included in Appendix I. Lastly the slides were mounted with Permount and cover
slips were placed on top of the slide. Slides were imaged under a light microscope (Axio Imager
M2, Carl Zeiss, Oberkochen, Germany).
H&E stained the spinal cord tissue such that gross morphology and anatomy were revealed. This
included the illustration of both grey matter and white matter tissue as well as underlying
structures such as cell bodies and axonal orientation. This was used to qualitatively validate the
sample types (GA, GT, WA, WT) that were mechanically tested revealing the degree of
contamination with other tissues while also confirming the orientation of the specimen.
Please note that the preliminary histology studies (Section 2.7.1 and 2.7.2) involved different
staining protocols. Due to H&E being simpler, less expensive, and quicker, it was chosen over
the other protocols as the staining protocol for this study.
2.7.1 White Matter Axon Direction Verification
The purpose of this verification study was to visually identify the orientation of the axons within
the white matter. All sections were stained with immunofluorescence. This process began with
drying of the slides for approximately one hour. The slides were then outlined with a PAP pen
creating a hydrophobic barrier. Next the slides were rehydrated with 0.01 M PBS for 10 minutes
before de-lipidation in an ascending series of ethanol concentrations (EtOH, 50%, 70%, 90%,
95%, 100%) followed by a descending series of ethanol concentrations (same as ascending but
in reverse order). Slides were incubated in blocking solution (500 μL/slide) composed of 10%
normal donkey serum (Jackson ImmunoResearch Laboratories, West Grove, PA) and 90%
Triton-PBS 0.1% for one hour. Primary antibodies used were SMI-312 (SMI) (Mouse host,
1:1000, Covance, Princeton, NJ), myelin basic protein (MBP) (Chicken host, 1:500, Aves Labs,
Tigard, OR), β-tubulin III (tub) (rabbit host, 1:1000, Covance, Princeton, NJ) and Platelet-
derived growth factor receptor alpha (PDGFRα) (Goat host, 1:100, Cedarlane Laboratories,
Burlington, ON, Canada) to stain for axons, myelin, and oligodendrocytes. This solution required
300 μL per slide composed of 5% normal donkey serum, the above antibody ratios by volume,
and Triton-PBS 0.1%. Sections were then washed with Triton-PBS 0.1% three times for 10 mins

73
each. Secondary antibodies conjugated with Alexa Fluor 488 (donkey host, mouse antigen,
Jackson ImmunoResearch Laboratories, West Grove, PA) Alexa Fluor 594 (donkey host,
chicken antigen, Jackson ImmunoResearch Laboratories, West Grove, PA), Alexa Fluor 405
(donkey host, rabbit antigen, Jackson ImmunoResearch Laboratories, West Grove, PA) and
Alexa Fluor 674 (donkey host, goat antigen, Jackson ImmunoResearch Laboratories, West
Grove, PA) were applied and the slides were allowed to incubate for two hours. This secondary
solution required 300 μL per slide composed of the above antibody ratios and PBS. All slides
were then washed with 0.01 M PBS and mounted with Fluoromount-G (Southern Biotech,
Birmingham, AL). Slides were imaged under a fluorescence microscope (Axio Imager M2, Carl
Zeiss, Oberkochen, Germany). The immunofluorescence images are shown in Figure 2-19.

74
Figure 2-19: Immunofluorescence images of white matter specimens. Axons are stained in
green (SMI), myelin is stained in red (MBP), and neuronal cell bodies are stained in blue
(Tub). (a) Cross-section of WA specimen. (b) Cross-section of WT specimen. (c) Close-up of
WA specimen. (d) Close-up of WT specimen.
The histological images in Figure 2-19 revealed key morphological structures with respect to the
orientation of the specimen. From Figure 2-19a and c, the WA specimen revealed cross-sections
of myelinated axons confirming the axial orientation. From Figure 2-19b and d, the WT
specimen revealed axons running rostralcaudally confirming the transverse orientation. This
confirmed that both WA and WT specimens were in the correct orientation. It was noted that a
small amount of grey matter (ie. contamination) was collected in Figure 2-19a as a result of the
sample collection procedure.
a
c d
b

75
2.7.2 Grey Matter Heterogeneity Verification
The purpose of this verification study was to visually quantify the percentage of grey matter to
white matter area ratios within the GA and GT specimens. The rationale behind this was that
there was some concern regarding whether a fully homogeneous grey matter sample was
obtainable. Given that the nominal diameter of the punch tube was 2 mm, it was hypothesized
that the samples collected would be heterogeneous. Eriochrome cyanine (EC) (Sigma-Aldrich,
St. Louis, MO) was used to stain for myelin. The procedure for this is included in Appendix H.
The following sample images (Figure 2-20) were generated using a digital slide scanner (Aperio
CS2, Leica, Wetzlar, Germany).
Figure 2-20: Sample eriochrome cyanine stained images of grey matter specimens. Myelin
(white matter) is in orange and grey matter is in blue (a) Cross-section of GA specimen. (b)
Cross-section of GT specimen.
Aperio ImageScope (Leica Biosystems, Wetzlar, Germany) was used for analyzing the amount
of grey matter area relative to white matter area. An algorithm configured with a set of tuning
parameters: hue value = 0.627, hue width = 0.506, colour saturation = 0.19 within the software
was employed to calculate the difference in contrast between both white and grey matter. The
grey matter samples were found to have an averaged grey matter to white matter ratio of 70:30.
This contamination of grey matter samples with white matter tissue was considered to be a
limitation to this study.
a b

76
Chapter 3: Results
3.1 Stress-Strain and Stress Relaxation Responses
In total, 12 porcine specimens were tested in confined compression. One specimen was removed
from the sample set as the data was observed to be greater than two standard deviations away
from the mean, thus it was deemed an outlier. Since the two-way ANOVA was selected for the
statistical analysis, this entire porcine specimen (GA, GT, WA, WT) was removed from the
sample set even though only GA’s data point was found to be an outlier. This was done to
maintain a balanced design for the statistical analysis.
Mean stress-time responses of GA, GT, WA, and WT specimens were tabulated for 11 porcine
specimens and graphed using MATLAB (Figure 3-1). The mean and standard deviation for each
specimen type is shown here while the all the raw data are shown in Appendix J.
Figure 3-1: Mean (blue) plus/minus one standard deviation (red) for GA (a), GT (b), WA
(c), and WT (d) specimens of all 11 pigs

77
Mean stress-strain and stress-time responses for each specimen group and for all pigs were
plotted (Figure 3-2 and Figure 3-3) to illustrate the mechanical behaviour of each specimen type
with respect to each other.
Figure 3-2: Mean stress-strain response for porcine spinal cord specimen types (indicated
in the legend)
Figure 3-3: Mean stress-time response for porcine spinal cord specimen types (indicated in
the legend)
0
20
40
60
80
100
120
140
0 0.02 0.04 0.06 0.08 0.1 0.12
Stre
ss (
kPa)
Strain
GA
GT
WA
WT
0
20
40
60
80
100
120
140
0 50 100 150 200 250
Stre
ss (
kPa)
Time (secs)
GA
GT
WA
WT

78
3.2 Constitutive Model Fit
The constitutive model described in Section 2.5 was used to fit each of the raw data curves
shown in Appendix J. This approach used the parameter optimization technique in Section 2.5.1
to determine the four material constants. As an example, one pig specimen’s set of data and its
respective model fit are shown below (Figure 3-4).
Figure 3-4: Experimental stress-time data and constitutive model fit of GA (a), GT (b), WA
(c), and WT (d) specimen data. The mean (blue) was plotted along with the loading
(orange) and relaxation (yellow) curve fits for pig #11.
The average value for each of the four material constants are reported in the Table 3-1. For the
independent curve fitted material constants, see Appendix J.

79
Table 3-1: Material constants A, B, g, and ꞇ (mean ± SD) for GA, GT, WA, and WT
specimens
Specimen A (kPa) B g ꞇ (secs)
GA (n=11) 124 ± 33 17 ± 2.7 0.97 ± 0.02 11.1 ± 3.2
GT (n=11) 168 ± 90 15 ± 3.8 0.95 ± 0.02 12.3 ± 3.2
WA (n=11) 120 ± 28 15 ± 1.3 0.98 ± 0.01 10.1 ± 2.0
WT (n=11) 136 ± 56 16 ± 2.5 0.98 ± 0.01 7.9 ± 2.1
3.2.1 Outcome Variables
The mean and standard deviation for each outcome variable and sample type are shown in Table
3-2. For all of the raw data from each of the pig specimens, see Appendix J.
Table 3-2: Peak stress, aggregate modulus, and time constant (mean ± SD) for GA, GT,
WA, and WT specimens
Specimen Peak Stress (kPa) Aggregate Modulus (kPa) Time Constant (secs)
GA (n=11) 124 ± 20 166 ± 57 11.1 ± 3.2
GT (n=11) 127 ± 26 244 ± 91 12.3 ± 3.2
WA (n=11) 75 ± 22 99 ± 40 10.1 ± 2.0
WT (n=11) 84 ± 14 107 ± 45 7.9 ± 2.1
All specimen type data sets exhibited a non-linear strain stiffening response followed by
immediate relaxation typical of spinal cord tissue according to Figure 3-2 and Figure 3-3. From
Table 3-2, grey matter was observed to have a higher peak stress and aggregate modulus than
white matter given the same strain regardless of direction. With respect to direction, although
grey matter peak stress was similar, grey matter’s aggregate modulus was larger in the transverse
direction. For white matter, its transverse direction was slightly larger in terms of both peak
stress and aggregate modulus than its axial direction. Both grey and white matter showed
relaxation to near zero stress at which point an apparent equilibrium was seen. Grey matter
experienced a slightly longer relaxation time than white matter overall. With respect to direction,

80
GT was slightly longer than GA specimens while the inverse was true for white matter
specimens (ie. WA > WT).
3.3 Statistical Results
3.3.1 Verifying Two-way ANOVA Assumptions
The Shapiro-Wilk’s score was used to test for normality [93]. The results for this are shown in
the Table 3-3.
Table 3-3: Summary of Shapiro-Wilk scores for each specimen and dependent variable
Specimen Dependent Variable
Peak Stress Aggregate Modulus Time Constant
GA 0.28 0.31 0.03
GT 0.60 0.60 0.73
WA 0.52 0.31 0.71
WT 0.86 0.10 0.41
There was one violation of normality (p<0.05) according to the Shapiro-Wilk’s score (shown in
red). Given that the two-way ANOVA requires approximately normal data and that it is quite
robust to violations of normality, it was assumed that the normality test was satisfied [94].
The Levene’s test score was used to test for homogeneity of variance [95]. The results for this
are shown in the Table 3-4.
Table 3-4: Levene’s test score for homogeneity of variance for each dependent variable
Dependent Variable Levene’s Test Score (p-value)
Peak Stress 0.136
Aggregate Modulus 0.014
Time Constant 0.120

81
There was one violation of the homogeneity of variance test (p<0.05) according to the Levene’s
test score (shown in red). Again, the ANOVA is generally quite robust to this violation as long as
the group sizes are equal [96]. Since the group sizes were equal in this study, it was assumed that
homogeneity of variance was satisfied.
3.3.2 Peak Stress Results
From the ANOVA the effect of tissue type was significant (F(1,40)=54.8, p<0.0001) such that
grey matter (126 ± 4.4 kPa; mean ± SEM) had higher peak stress than white matter (80 ± 4.4
kPa) while the effect of direction on peak stress was non-significant (F(1,40)=0.94, p=0.338).
The interaction between both effects was found to be non-significant (F(1,40)=0.25, p=0.619).
This is shown in Figure 3-5.
Figure 3-5: Column plot of mean peak stress (mean ± SD) for GA, GT, WA, and WT
specimens

82
During the loading phase, grey matter was approximately 58% stiffer than white matter.
Although the effect of direction was insignificant, it was observed that there was almost no
difference between directions for grey matter (2%). For white matter, a marginally softer
response (11%) was seen in white matter’s axial direction relative to its transverse direction.
3.3.3 Aggregate Modulus Results
From the ANOVA the effect of tissue type was significant (F(1,40)=30.7, p<0.0001) such that
grey matter (205 ± 13 kPa) had higher aggregate modulus than white matter (103 ± 13 kPa). The
effect of direction was also significant (F(1,40)=5.3, p=0.027) such that the transverse direction
(175 ± 13 kPa) was greater than its axial direction (133 ± 13 kPa). The interaction between both
effects was found to be non-significant (F(1,40)=3.6, p=0.067). This is shown in Figure 3-6.
Figure 3-6: Column plot of mean aggregate modulus (mean ± SD) for GA, GT, WA, and
WT specimens

83
During the relaxation phase, grey matter reached an equilibrium stiffness that was approximately
double (100%) that of white matter. The transverse direction was 32% stiffer than the axial
direction. Upon closer review of the individual specimen responses, there was a 50% difference
between GA and GT specimen stiffness compared to only an 8% difference between WA and
WT specimens. It is clear that the effect of direction was more influenced by grey matter’s
directional differences than that of white matter.
3.3.4 Time Constant Results
From the ANOVA the effect of tissue type was significant (F(1,40)=10.8, p=0.002) such that
grey matter (11.7 ± 0.6 secs) had a longer relaxation time than white matter (9.0 ± 0.6 secs). The
effect of direction was found to be non-significant (F(1,40)=0.42, p=0.521). The interaction
between both effects was found to be significant (F(1,40)=4.3, p=0.043). This is shown in
Figure 3-7.

84
Figure 3-7: Column plot of mean time constant (mean ± SD) for GA, GT, WA, and WT
specimens
Given that the interaction effect was significant, multiple simple effect tests were conducted and
the main effects were ignored [97]. This breaks the interaction effect into parts and tests these
individual parts for significance using pairwise comparisons. In this case there were four
additional comparisons that were analyzed:
1) Differences in tissue type on relaxation times for the transverse direction;
2) Differences in tissue type on relaxation times for the axial direction;
3) Differences in direction on relaxation times for grey matter tissue;
4) Differences in direction on relaxation times for white matter tissue;
Since multiple comparisons were made, a Bonferroni adjustment was included. Of the four cases,
only case #1 was found significant. This meant for the transverse direction, grey matter tissue

85
possessed a 55% longer relaxation time (F(1,40)=14.4, p<0.001) than white matter. For the axial
direction, tissue type had no effect (F(1,40)=0.72, p=0.403) as it was only 10% different. For
grey matter tissue, direction had no effect (F(1,40)=1.0, p=0.315) as was the same for white
matter tissue (F(1,40)=3.7, p=0.060). Respectively these were only 10% and 28% different.
3.3.5 Effect of Time Post-Mortem on Peak Stress Results
The linear regression analysis examining peak stress and time post-mortem was non-significant
for GA (p=0.279), GT (p=0.980), WA (p=0.399), and WT (p=0.985) specimen types. This is
shown in Figure 3-8.
Figure 3-8: The effect of time post-mortem on peak stress of GA, GT, WA, and WT
specimens. A linear trendline was plotted for each of the four specimen types.
0
50
100
150
200
250
300
00:00 01:12 02:24 03:36 04:48 06:00 07:12
Pea
k St
ress
(kP
a)
Time Post-Mortem (hours:mins)
The Effect of Time Post-motem on Peak Stress
Grey Axial Grey Transverse White Axial
White Transverse Linear (Grey Axial) Linear (Grey Transverse)
Linear (White Axial) Linear (White Transverse)

86
3.4 Histology
The H&E stain revealed cell nuclei (glial cells, neurons) in blue, cytoplasm in pink, with all
other structures in shades of pink. These shades distinguished the grey matter from the white
matter (Figure 3-9 and Figure 3-10). Please note that the sections have been slightly adjusted to
illustrate a higher level of contrast between grey and white matter structures using Zen imaging
software (Carl Zeiss, Oberkochen, Germany).
Figure 3-9: H&E stained spinal cord sections showing gross morphology of GA (a), GT (b),
WA (c), WT (d) specimens. The scale bar represents 500 μm.

87
Figure 3-10: H&E stained spinal cord sections showing close-up of gross morphology of GA
(a), GT (b), WA (c), and WT (d) specimens. Cell nuclei are stained in blue. The scale bar
represents 250 μm.
The histology of GA, GT, WA, and WT specimen types for one porcine specimen are shown in
the figures above. Figure 3-9 shows a general overview of the specimens while Figure 3-10
shows a closer look at the morphology.
The GA specimens were observed to be heterogeneous such that there was contamination of
white matter within the grey matter samples (Figure 3-9a and Figure 3-10a). A white line was
drawn indicating both tissue types. The grey matter horn was found within the boundary line.
This boundary was evident based on the numerous stained neuronal and glial cell nuclei in blue.
The larger cell nuclei were neuronal cell bodies whereas the smaller cell nuclei were glial cell

88
bodies. The depiction of the grey matter horn confirmed that the correct specimen orientation
was tested; in its axial direction.
The GT specimens were also observed to be heterogeneous such that there was contamination of
white matter within the grey matter samples (Figure 3-9b and Figure 3-10b). A white line was
drawn indicating both tissue types. The grey matter was located centrally. The white matter was
found on both left and right sides of the grey matter. The central region revealed a large density
of cell nuclei representative of grey matter tissue. In contrast the left and right side regions
revealed fewer cell nuclei and longitudinal structures representative of axons in white matter
tissue. The depiction of the axons running longitudinally as well as the presence of grey matter
confirmed that the correct specimen orientation was tested; in its transverse direction.
The WA specimens were observed to be predominantly homogeneous. The contamination of
grey matter within the white matter specimen was practically negligible. This contamination can
only be seen in Figure 3-9c where the grey matter was shown by the different hue on the left and
upper left hand side of the section. Figure 3-10c showed few cell nuclei and numerous white
circular structures. These white circular structures represented myelin as neither hematoxylin or
eosin stained for myelin. These cross-sections of myelin confirmed that the correct specimen
orientation was tested; in its axial direction.
The WT specimens were observed to be predominantly homogeneous. The contamination of
grey matter within the white matter specimen was non-existent. Figure 3-10d showed few cell
nuclei and numerous longitudinal structures representative of axons. This confirmed that the
correct specimen orientation was tested; in its transverse direction
In general there was contamination of white matter in grey matter tissue sections while negligible
amounts of grey matter were found in white matter tissue sections. The pilot study performed in
Section 2.7.2 confirmed that on average grey matter specimens were contaminated with 30%
white matter tissue. In comparison, white matter specimens were contaminated with a maximum
of 10% grey matter tissue.

89
Chapter 4: Discussion
4.1 Overview
In this thesis, a novel experimental method for testing the mechanical properties of spinal cord
grey and white matter in confined compression was developed. This research contributes to an
existing body of literature on spinal cord mechanical properties. It is the first attempt at
investigating the anisotropic time dependent mechanical properties of spinal cord grey and white
matter. The effect of tissue type and direction are relevant properties as further insight will
explain stress and strain states within the spinal cord in the hopes of developing an injury
criterion relating tissue damage patterns to their pathologies.
4.2 Mechanical Property Findings
4.2.1 Time Independent Mechanical Properties
The time independent mechanical properties demonstrated a nonlinear strain stiffening response
with increasing compressive strain. This was observed for all specimen types. This behaviour is
characteristic of grey and white matter tissue as described in the literature [41], [47], [59], [63].
The magnitude of mean peak stresses in this study ranged from 75 – 127 kPa for grey and white
matter. This is consistent with that of Haslach et al. who performed confined compression using
brain tissue and measured 16 – 171 kPa using similar peak strains and strain rates [51].
There were 12 pig specimens initially tested but one was removed since its peak stress was found
beyond two standard deviations from the mean. It was found that this specimen was undersized
within the punch. This meant that when the specimen was compressed, it was required to first
expand to fill out the confining chamber. Mow et al. stated that imperfections in specimen
geometry led to pre-expansion of the specimen before true confined compression was attained
[79]. This led to an underestimation of the tissue’s peak stress when peak strain occurred.
During the loading phase of the tissue, occasional sharp stress drops were observed. The drops in
stress indicated the tissue’s resistance to the nonporous indenter was momentarily lost. This
phenomenon was observed by Haslach et al. who attributed this as subfailure tissue damage.
These subfailures occurred from the rearrangement of substructures as the tissue was compressed
and the fluid phase within the tissue was redistributed [51].

90
The time independent mechanical properties showed that the effect of tissue type was
statistically significant while the effect of direction was non-significant. Grey matter was 1.6
times stiffer than white matter regardless of direction. These results suggest the spinal cord is
heterogeneous and exhibits isotropic properties in compression.
The literature looking at the effect of tissue type on the time independent mechanical properties
of the spinal cord are controversial. The current findings agree with other ex-vivo tissue studies
by Ichihara et al., and Koser et al. where grey matter was found to be 1.74 – 2.13 times stiffer
than white matter. Ichihara et al. performed tension while Koser et al. performed indentation
[11], [59], [63]. Given that the grey matter samples in this study were contaminated with white
matter, it is plausible that the results would be even more agreeable with that of Ichihara et al.,
and Koser et al. if no contamination was present.
The current findings disagree with Ozawa et al.’s, and Sharkey’s work. The first saw no
difference while the other saw white matter to be two times stiffer than grey matter [58], [60].
Ozawa et al. potentially found a lack of significant difference between tissue type as low peak
strains were used. Ichihara et al. compared their data with that of Ozawa et al. and observed that
there was no significant difference between tissue type in their tensile study for strain levels up
to 5% [59]. Sharkey’s study quantified the in-vivo mechanical properties of the spinal cord
however the resolution of the MR images was poor [58]. This made it difficult to precisely
characterize the deformations seen in the spinal cord, possibly leading to inaccurate predictions
of its mechanical properties.
The mechanical properties of brain grey and white matter tissue are also controversial. Feng et
al. conducted indentation work using brain grey and white matter, and found white matter to be
approximately two times stiffer than grey matter [56]. Budday et al. performed shear,
compression, and tension tests on brain grey and white matter within the same study. They
concluded that grey matter was between 2.5 – 5 times stiffer than white matter. This highlights
the complexity of studying nervous tissues as differences exist between brain and spinal cord
mechanical properties.
The literature looking at the effect of direction on the mechanical properties of the spinal cord
are sparse. The current study agrees with both Ozawa et al. and Koser et al. who found no
difference in directional properties for spinal cord grey matter tissue [11], [60]. In relation to

91
brain grey matter tissue, there is also a strong consensus as all studies showed no statistical
difference in mechanical properties between grey matter directions [56], [57], [71]. The results of
these numerous studies agree with the underlying morphological structure of grey matter as it
consists of randomly oriented cell bodies and axons. This further confirms that grey matter tissue
behaves like an isotropic material.
The studies focusing on the directional properties of white matter show mixed results. The
current study agrees with Ozawa et al. but disagrees with Koser et al.. The latter study found
spinal cord white matter to be 1.6 times stiffer in its transverse direction than axial direction in
indentation [11], [60]. Brain white matter tissue also showed mixed results. Budday et al. saw
non-significant differences when the tissue was measured in tension and compression [71].
However Prange & Margulies, Feng et al., and Schmidt et al. all saw statistical significances
between the directional properties of white matter in shear, indentation, and MRE respectively.
These latter studies reported anisotropy ratios ranging between 0.6 – 2.4 [56], [57], [85].
Spinal cord white matter was recently hypothesized to behave like a transversely isotropic
material. This is due to its highly aligned fibre orientation. Jannesar et al. proposed a conditional
transversely isotropic mathematical model for characterizing white matter [8]. The condition
meant that white matter was transversely isotropic in axial tension and isotropic in compression.
Axons were shown to be sensitive to loading type; bearing negligible load in compression while
bearing additional load in tension. This study agrees with the compressive behaviour
hypothesized by Jannesar et al. however it does not rule out the possibility that the spinal cord
may be transversely isotropic since other loading types were not investigated.
4.2.2 Time Dependent Mechanical Properties
The time dependent mechanical properties showed that all tissues demonstrated immediate
relaxation while the displacement of the nonporous indenter was fixed. In all cases, the sample
types relaxed approaching an equilibrium stress that was near zero stress. This near zero stress
indicates that spinal cord tissue behaves somewhat like a Maxwell fluid model. This emphasizes
the important role that the fluid phase plays in the relaxation phase of the tissue.
The relaxation phase was characterized by a 1-term Prony series instead of the conventional 3-
term Prony series used by other researchers [8], [41], [43], [44], [47], [73]. Additional Prony

92
series terms provide better fits to data however additional coefficients are introduced making
comparisons between specimen types difficult. This is true for comparing relaxation times
between specimens since multiple time constants are used. A sensitivity analysis showed that the
1-term Prony series was adequate in characterizing the spinal cord tissue’s response. The
drawback of the 1-term Prony series was that it provided a slight overestimation of the aggregate
modulus. Nonetheless it is advantageous as it provides a unique solution to the constitutive
model so that all four specimen types can be compared.
4.2.2.1 Aggregate Modulus
The amount of relaxation from the peak stress seen in this study is similar with what others have
described for brain tissue in compression [40], [51]. The differences in experimental setup
between studies resulted in different ranges of aggregate moduli. Here the reported mean
aggregate modulus was 99 – 244 kPa for all specimen types. Cheng & Bilston measured 0.350
kPa using 5% strain and unconfined compression [40]. The aggregate modulus determined by
Cheng & Bilston was lower than the range found in this study due to the lower peak strain used.
Ichihara et al. showed that an increase in aggregate modulus is directly correlated with an
increase in peak strain [59]. Moreover, Cheng & Bilston performed their study in unconfined
compression. This meant that fluid was allowed to escape laterally. This led to lower measured
forces than in a fully confined setup. In another study, Haslach et al. saw a maximum aggregate
modulus of 50 kPa. This was lower than the range found in this study due to the use of both a 40
and a 20 micron porous filter above and below the specimen [51]. This setup is different from
this study where only one 20 micron filter was used below the specimen. It is likely the added
filter allowed fluid to exude superiorly and inferiorly leading to a lower aggregate modulus.
For aggregate modulus, the effects of tissue type and direction were statistically significant. The
aggregate modulus for grey matter was two times stiffer than white matter regardless of
direction. The aggregate modulus for the transverse direction was 1.3 times stiffer than the axial
direction regardless of tissue type. These results suggest that the spinal cord exhibits time
dependent mechanical properties that are heterogeneous and anisotropic. It was noted that the
difference between GA and GT had a larger impact on the statistical significance than WA and
WT. The anisotropy ratio between GT and GA was 1.5 while between WT and WA it was 1.1.

93
This study is consistent with several others in the literature when comparing the aggregate
modulus of grey and white matter. Ichihara et al. compared grey and white matter tissue
equilibrium stress after 100 secs of relaxation in axial tension. At 20% and 30% fixed strain, grey
matter was 1.3 and 2.5 times stiffer than white matter [59]. Budday et al., measured the
compressive stress in the cortex (grey matter) and corpus callosum (white matter) after 5 mins of
relaxation using 10% strain. They saw that the cortex was 1.5 times stiffer than corpus callosum
[71]. Prange & Margulies analyzed the shear modulus during relaxation of both the cortex and
corpus callosum tissues as well. Although an equilibrium condition was not reached, they
showed that the cortex had a statistically significantly stiffer modulus at every time point
compared to corpus callosum [57].
This study is inconsistent with the study by Prange & Margulies with regards to the effect of
direction. Although both studies demonstrated a statistically significant effect of direction, the
anisotropy ratios were opposite to each other. Prange & Margulies showed the cortex exhibited
no difference between orthogonal directions. For corpus callosum they showed the transverse
direction of corpus callosum was half the stiffness of the axial direction. This reveals differences
in mechanical properties between shear and compression modalities of nervous tissue.
4.2.2.2 Time Constant
For time constant, the interaction effect was found to be statistically significant. Four pairwise
comparisons were performed revealing only one statistically significant difference. The
relaxation time for grey matter was found to be 60% longer than white matter specifically in the
transverse direction.
This study is consistent with the study by Budday et al. It was observed that corpus callosum
relaxed 78% from its peak stress in 5 mins compared to 62% from the cortex [71]. Although this
is not a direct measure of relaxation time, it is consistent in that the grey matter took longer to
relax than white matter.
The significantly longer relaxation behaviour of grey matter in contrast to white matter can also
be explained with the concept of permeability. While it was not directly measured in this study,
white matter has been hypothesized to have a larger permeability than grey matter [98]. The
larger stiffness of grey matter along with the randomly oriented unmyelinated axons are

94
dispersed throughout the grey matter offering structural resistance to dilatation and larger fluid
flow resistance than that of white matter [98]. Lai et al. demonstrated for cartilage that increased
permeability led to a quicker relaxation to equilibrium as the decreased resistance to fluid flow
facilitates fluid redistribution within the tissue [80].
4.2.3 Effect of Time Post-Mortem on Peak Stress
The linear regression analysis saw no significant increase in stiffness in peak stress with
increasing time post-mortem. This was found for all four sample types when mechanical testing
was completed with six hours of euthanasia. This is consistent with Garo et al. who studied the
mechanical properties of brain tissue and found that the mechanical properties were constant up
to 6 hours after euthanasia [74]. These results are inconsistent with those of Ramo et al., and
Oakland et al. who saw increases in stiffness under six hours [62], [73].
The time criterion for this study was chosen due to the numerous sample types that needed to be
tested. This was necessary to address the proposed research question in this thesis. No significant
correlations between time post-mortem and peak stress were found indicates that the effect of
time post-mortem did not affect the results presented in this study. This validated the use of six
hours post-mortem for mechanical testing.
4.3 Comparison to Histological Parameters
The histology of each specimen type revealed underlying morphologies that helped further
explain some of the observed findings. The time independent properties can be explained by the
cellular components that distinguish grey matter from white matter. From the histology it was
observed that grey matter possessed neuronal cell bodies while white matter did not. It was also
shown that grey matter had a larger density of cell bodies compared to white matter. Cellular
stiffness’ of neurons and glial cells (astrocytes) have been previously measured in terms of their
rheological characteristics in the literature. Although both types of cell bodies exhibit more
elastic solid behaviour than viscous fluid behaviour, glial cells were found to be twice as soft as
neurons [99], [100]. In another study, Koser et al. stained for cell bodies and correlated the
number of cell bodies with measured stiffness’ in grey and white matter. They saw that an
increase in cell body density was directly correlated with an increase in stiffness [11]. These

95
results further support the effect of tissue type with respect to the time independent properties
seen in this study where grey matter was significantly stiffer than white matter.
The viscous fluid behaviour of neurons and astrocytes support the viscoelastic properties seen
here for both grey and white matter. Ayala et al. modeled the rheological viscoelastic behaviour
of both these cell body types and reported that neurons have a higher viscosity than astrocytes
[100]. The higher stiffness and viscosity of neurons relative to astrocytes further supports the
argument that grey matter exhibits not only a larger aggregate modulus but also a longer
relaxation time than white matter.
The time independent and dependent properties between grey matter directions were unique. The
results showed that GT specimens exhibited an aggregate modulus that was 1.5 times stiffer than
GA specimens despite nearly identical peak stresses between them. Testing of GA and GT
samples in the literature has shown no significant differences in both stiffness and aggregate
modulus when comparing two orthogonal directions [11], [56], [57], [60]. It is hypothesized that
the phenomenon seen here is a result of tissue contamination and its interaction with the porous
filter. Contamination refers to the fact that the grey matter tissue samples were slightly
contaminated with white matter tissue. The GA and GT specimens that were collected are shown
in Figure 4-1.
Figure 4-1: Geometry of GA (left) and GT (right) specimens during sample collection. The
circle and rectangle represents an approximated scaled sample. The image is adapted from
Polarlys – CC by SA 3.0
Figure 4-1 illustrates that both GA and GT specimens interact with the porous filter differently.
This is shown by the different percentages of grey matter area interfacing with the porous filter.

96
GT specimens possessed more grey matter at this interface. As a result GT was estimated to have
stiffer cellular bodies and more solid-like behaviour than GA. This may be the reason why GT
had a higher aggregate modulus than GA specimens. It could also be said the contamination of
white matter in the GA sample at the interface permits more fluid evacuation due to its increased
permeability. Increased permeability leads to an increased relaxation rate. This phenomenon is
consistent with the results of this study as GA’s aggregate modulus was found to lie between GT
and white matter specimen types.
The permeability of spinal cord tissue was recently measured using diffusion-weighted MRI. It
was found to be contrary to what was found in this study. The permeability from highest to
lowest reported was WA, grey matter, and WT [101]. No distinction was made between GA and
GT specimens as isotropy was assumed. It was recognized that this model was limited as it
assumed a constant axon diameter of 4 μm between both grey and white matter [101], [102].
The permeability model was adapted for use in this study to more accurately quantify the tissue
permeability with respect to the parameters of this study. Given that white matter samples were
taken from the lateral white matter, a diameter of 3.2 μm was used instead. This was found to be
the diameter of axons in the corticospinal tract [103]. Grey matter dendrites and axons on the
other hand were estimated to be approximately 1 μm [101]. The permeability for each specimen
type was recalculated using these new measurements. From highest to lowest, it was found to be
WA, WT, and grey matter. The estimated values of permeability were 1.6 x 10-13 m2, 3.2 x 10-14
m2, and 1.2 x 10-14 m2 for WA, WT, and grey matter respectively [104]. This is consistent with
the relaxation behaviour observed in this study
The permeability model used here is not without its limitations. The mathematical models used
are a function of axon diameter only. In addition it considered ideal flow through a hexagonal
array for white matter tissue [104]. From Section 1.3.3, it is observed that the structure of white
matter is more complex than a hexagonal array as axonal fibres are not perfectly straight. Axon
diameter and density also vary throughout introducing heterogeneity within white matter tissue
[103]. The vasculature that is prevalent across grey and white matter also influences the fluid
flow through the spinal cord which was not considered. Perhaps these added complexities is the
reason the interaction effect between tissue type and the transverse direction was observed.

97
4.4 Clinical Relevance to SCI
The current expected stress-strain state of contusion SCI on both grey and white matter is
compressive stress-strain at the point of impact, generating tensile stress-strain in the
rostralcaudal direction [4]–[6], [8]. The typical assumptions of computational models often
include a homogeneous and isotropic spinal cord [4]–[6]. This means the stress-strain states in
both grey and white matter are equal in magnitude and are distributed equally in every direction.
4.4.1 The Effect of Time Independent Mechanical Properties on SCI
The time independent mechanical properties provide insight into the spinal cord stress-strain
state following impact to the spinal cord. The statistically significant difference in stiffness
between grey and white matter suggests that grey matter exhibits higher stresses than white
matter in the spinal cord cross-section. This is supported by the finite element analysis by
Nishida et al.. They modeled the spinal cord with stiffer grey matter than white matter in their
model. They showed that increasing transverse compression of the spinal cord resulted in a
higher stress distribution in grey matter than white matter in the cross-section of the spinal cord
[7]. Additionally, Maikos et al. conducted a sensitivity analysis whereby the stiffness of white
matter was 20% less stiff than grey matter. They showed that grey matter experienced a higher
stress relative to white matter [4].
The increased stiffness of grey matter suggests that grey matter undergoes less strain than white
matter following impact at the injury epicentre and rostralcaudal from the epicentre. At the injury
epicentre, Jannesar et al used stiffer grey matter than white matter properties and showed that
white matter exhibited increased strain compared to grey matter within the cross-section of the
spinal cord [8]. This is also supported by the sensitivity analysis performed by Maikos et al.. The
sensitivity analysis showed that decreasing the stiffness of white matter relative to grey matter
saw increased strain in the white matter compared to grey matter [4]. Jannesar et al. also
investigated the rostralcaudal propagation of strain from the epicentre. They found for the stiffer
grey matter that strain steadily decreased by up to 70% at greater rostralcaudal distances from the
injury epicentre. In contrast white matter strain was nearly constant even at further rostralcaudal
distances from the injury epicentre [8].

98
Mechanical strain has been widely used to correlate with SCI in animal models [4], [5], [8]. The
different amount of strain propagation in both grey and white matter tissue discussed above show
consistency with the tissue sparing observed by Lam et al. after SCI in a rat. This study used a
combination of contusion depths and velocities to perform SCI. As an example, the tissue
sparing from a contusion depth of 1.5 mm and a velocity of 800 mm/s will be used for this
discussion.
Grey matter saw 20% tissue sparing at the injury epicentre. At +/- 1 mm from the epicentre, there
was 60% tissue sparing. Beyond this there was practically no damage seen. With the same
biomechanical injury parameters, the less stiff white matter saw 30%, 65%, and 85%, tissue
sparing at the epicentre, +/- 1 mm from the epicentre, and +/- 2 mm from the epicentre. After
which there was no more observed damage. This distribution of injury in the grey and white
matter was observed for all combinations of impact velocity and injury depth [22]. Lam et al.’s
study demonstrated that tissue damage propagated further rostralcaudally in the white matter
than grey matter when quantified by the amount of tissue sparing. These tissue sparing results by
Lam et al. correlate well with the elevated strains that were found to propagate further in white
matter compared to grey matter when modeled by Jannesar et al..
The higher stiffness of grey matter relative to white matter suggests that grey matter tissue
damage may be strain based. The stiffer grey matter exhibits significantly more stress than white
matter when both are strained equally [63]. Lam et al. showed that grey matter sparing was only
significantly affected by impact depth and not velocity despite varying both parameters [22].
This is further supported by Sparrey et al. who studied the effect of velocity at a fixed contusion
depth. The hemorrhage volume within grey matter was the same regardless of velocity [19].
These studies suggest that strain may be a good predictor for grey matter tissue damage.
The non-significant difference between axial and transverse directions suggests that both stress-
strain states propagate uniformly in both directions. This is consistent with the model
assumptions by both Maikos et al. and Jannesar et al.. The former assumed isotropic material
properties. The latter proposed white matter to exhibit transversely isotropic properties in tension
and isotropic properties in compression. This study confirms the second half of that statement
and future work investigating spinal cord anisotropic behaviour should include tensile testing.

99
4.4.2 The Effect of Time Dependent Mechanical Properties on SCI
The time dependent properties suggests how spinal cord tissue stresses and strains change with
respect to time from persistent compressive strain. This has not been studied in computational
models of SCI. The findings from this study suggest three things. The statistically significant
difference in time constant indicates that transverse stresses applied to the spinal cord recover
significantly quicker in white matter than in grey matter. Second, the significant difference
between grey and white matter aggregate modulus show that grey matter maintains a higher
stress state than white matter following persistent compressive strain. Third, the significant
difference between transverse and axial direction aggregate modulus suggests that transverse
loading results in a higher spinal cord stress state than from axial loading. Higher residual stress
states in grey matter and the transverse direction of the spinal cord may point towards further
tissue damage in these areas following persistent compressive strain.
4.4.3 The Effect of Spinal Cord Tissue Bulk Moduli
Spinal cord tissue bulk moduli were not determined in this study, however the findings suggest
that grey matter has a higher bulk modulus than that of white matter. This is due to the higher
stiffness found for grey matter than white matter. The increased grey matter stiffness likely
means that a higher pressure is required to decrease the volume of grey matter in comparison to
white matter. This provides insight into the compressibility of grey and white matter tissue upon
spinal cord deformation.
This is contrary to the bulk moduli reported for brain grey and white matter tissue in the
literature. Zhou et al. modeled a higher bulk modulus for white matter than grey matter in their
computational model of brain injury. However it was noted that their model assumption was
made at a time when there was no supporting experimental data [53], [54].
A study by McElhaney et al. found the bulk modulus of brain tissue and water were not
significantly different [55]. This suggests the mechanical behaviour of nervous tissue behaves
similarly to that of a fluid. This reinforces the fluid behaviour that was observed in this study (ie.
the relaxation to a near zero stress).
To the author’s knowledge, bulk moduli of grey and white matter tissue have only been reported
for studies of brain tissue. This material property has been used to study brain injury using

100
computational models. Given its application, this is an important consideration as it may be
extended for use in SCI computational models.
4.4.4 Drug Delivery
The relaxation time behaviour provided indirect insight into the permeability of spinal cord
tissue. Permeability is an important parameter because it characterizes the spinal cord as a porous
media through which drug delivery can be studied. This is an important to consider as different
permeabilities within the spinal cord may hinder targeted therapies from being delivered to the
appropriate location within the spinal cord.
The results suggest the permeability of white matter to be larger than grey matter. This means
that interstitial fluid will flow more easily through white matter than grey matter. The increased
flow resistance of grey matter may mean that a larger pressure gradient is needed to deliver drugs
through grey matter tissue [105].
Venton et al. modeled white matter permeability as anisotropic with WA greater than WT [101].
This would suggest that interstitial fluid flow would flow more easily rostralcaudally than
mediolaterally. Although this was not observed in this study, additional work investigating the
porous properties of spinal cord tissue is encouraged.
4.5 Limitations
4.5.1 Heterogeneity of Samples
From the histology that was performed, it was evident that the grey matter samples were
heterogeneous compared to the white matter samples. Although the results were quite clear
when comparing grey and white matter mechanical properties, the contamination of grey matter
samples with white matter tissue prevented the measurement of the true mechanical properties of
grey matter in this study.
This issue could be solved by the combination of the following two approaches. The first is to
collect from the cervical and/or lumbar enlargements as there is a larger amount of grey matter in
these regions. The second is to reduce the diameter of the collected specimen. The latter should
be optimized to be as large as possible. This is because measured forces are a function of the

101
diameter squared. In other words decreasing the diameter by half would result in a quarter of the
force.
4.5.2 Strain Rate and Strain Sensitivity
Spinal cord tissue as well as its constituents are strain rate and peak strain sensitive as described
in the literature. They experience an increase in stiffness the faster and the more they are strained
regardless of how it is deformed as shown. This was shown for both its time independent and
dependent properties [41]–[44], [47], [59].
This study compressed tissue samples to a maximum of 10% strain. This is a limitation as it does
not cover the range of spinal cord deformations seen in SCI. Experimental models of SCI have
used spinal cord compression depths between 0% and 90% to study the effect of depth [17]–[22],
[24], [38]. Larger than 10% strains were attempted in preliminary tests. It was found that beyond
this peak strain, the data no longer experienced a strain-stiffening behaviour due to subfailure
tissue damage. This was also shown by Haslach et al.. They showed that peak stresses occurred
anywhere between 2% - 28% strain. Beyond this point the strain-stiffening behaviour was no
longer apparent [51]. Subfailure tissue damage was avoided in this study as it made it difficult to
compare data sets and draw conclusions between specimen types.
Future studies incorporating larger strains may be possible by using a porous filter above and
below the specimen. In doing so will allow greater fluid evacuation which should allow for
larger deformations. This was the experimental setup used by Haslach et al. [51]. It was not
possible for this study due to the pia mater that remained on the superior surface of the WT
specimen.
This study compressed tissue samples using a quasi-static strain rate of 0.001/sec. This is a
limitation as it does not cover the range of spinal cord impact velocities seen in SCI.
Experimental models of SCI have used velocities between 3 mm/s – 6000 mm/s to study the
effect of velocity [19], [20], [22], [24]. The constitutive model parameters developed in this
study can be used to predict the mechanical behaviour of spinal cord tissue at faster strain rates.
However these would need to be compared to future experimental studies involving multiple
strain rates to verify the parameters’ predictions.

102
4.5.3 Loading Type
Spinal cord tissue is sensitive to loading type (ie. shear, compression, tension, etc.) as described
in the literature [42], [47], [59], [60]. This study only included confined compression of spinal
cord tissue in the axial and transverse directions. This is a limitation as compression does not
fully describe the stress-strain state of the spinal cord. The stress-strain state of SCI involves
transverse compression and axial tension [4], [5], [8]. Tensile anisotropy will need to be included
into future studies to fully describe the anisotropic behaviour of SCI.
4.5.4 Ex-Vivo Tissue
The mechanical properties discussed in this thesis were found from using ex-vivo and not in-vivo
tissue. The in-vivo properties may not necessarily be the same as the ex-vivo properties
concluded in this study. Future studies should explore methods to test spinal cord tissue in-vivo.

103
Chapter 5: Conclusion
5.1 Conclusions
This work found that the spinal cord grey and white matter mechanical properties are
heterogeneous and slightly anisotropic. The effect of tissue type was prevalent across all
outcome variables measured. Grey matter was observed to be stiffer than white matter by
exhibiting significantly higher peak stress, and aggregate modulus. Grey matter was also
observed to have a longer relaxation time than white matter specifically in the transverse
direction. The effect of direction was only significant for the aggregate modulus outcome
variable. The transverse direction had a stiffer aggregate modulus than the axial direction. These
findings emphasize the important differences between tissue type and to a lesser extent direction
when modeling spinal cord grey and white matter tissue in finite element models for studying
SCI biomechanics.
This work met the proposed thesis objectives (Section 1.8.2) in the following ways:
1) A novel experimental approach to evaluating grey and white matter tissue anisotropy was
developed. A custom biopsy punch integrated within a custom confined compression
apparatus were designed. The punch preserved tissue structure after collecting the
specimen, and integration within the confined compression apparatus maintained tissue
orientation. This allowed for GA, GT, WA, and WT specimens to be mechanically tested
in confined compression.
2) A QLV model incorporating a first-order exponential function and a one-term Prony
series was used to characterize the non-linear viscoelastic response of spinal cord grey
and white matter tissue highlighting important parameters such as peak stress, aggregate
modulus, and relaxation time. Peak stress was easily identified while aggregate modulus
and relaxation time were approximated using a 1-term Prony series.
3) The effect of tissue type, direction, and their interaction on the mechanical properties of
spinal cord grey and white matter in confined compression were adequately analyzed in
this study. A two-way ANOVA permitted the analysis of these effects. The analysis
revealed a strong effect of tissue type and a weak effect of direction. This means that the
spinal cord exhibits heterogeneous and slightly anisotropic mechanical properties.

104
5.2 Contributions
This research is the first investigation of spinal cord grey and white matter tissue mechanical
properties in a confined compression test. This research examined both the effect of tissue type
and direction. This was done by evaluating both time independent and dependent mechanical
properties of the spinal cord.
The study adds to the controversial literature surrounding the mechanical properties of the spinal
cord grey and white matter; the effect of tissue type. It corroborates with previous work stating
that grey matter is stiffer than white matter in terms of peak stress and aggregate modulus. It is
the first to report relaxation times comparing spinal cord grey and white matter and corroborates
with brain tissue studies.
The study adds to the sparse literature surrounding the directional properties of spinal cord grey
and white matter. The time independent directional properties corroborates with previous work
stating that the spinal cord is isotropic in compression. The time dependent directional properties
are the first to be reported and states that the aggregate modulus in the transverse direction is
larger than the axial direction.
The mechanical design and protocol used to collect isolated tissue samples is a novel design. The
mechanical design can be adapted for future studies of spinal cord confined compression. The
sample collection protocol can be adapted for future studies examining the mechanical properties
of spinal cord grey and white matter in other loading types.
5.3 Recommendations for Future Work
In order to continue improving existing spinal cord material models for studying SCI
biomechanics, several recommendations for future work are described:
1) Tensile anisotropy should be studied to better characterize the stress-strain state of the
spinal cord in SCI. The sample preparation protocol described could be adapted to collect
specimens. The difficulty will be in testing transverse specimens of grey and white
matter. The spinal cord provides limited lengths for grey and white matter transverse
specimens. Clamping of short tissue lengths results in tissue behaviour that is dominated
by end effects. As such a novel attachment method will need to be developed to apply

105
transverse tension. This will not be a problem for axial specimens as longer lengths can
be collected from the spinal cord.
2) Computational models of SCI should be updated to include the mechanical property
findings from this study. These properties are different than those assumed and used by
current models. This would yield a new stress-strain distribution for the spinal cord. The
new stress-strain distribution can be correlated with injury mechanisms from
experimental models of SCI; ultimately relating stress-strain distribution with histological
tissue damage. This may provide insight into developing a stress-strain injury criterion
for spinal cord tissue.
3) The differences in mechanical properties existing between cervical, thoracic, and lumbar
regions can be studied. The emphasis should be placed on studying the cervical spinal
cord region. This is due to the prevalence of SCI occurring at this level. Cervical and/or
lumbar regions also feature enlargements in grey matter because these regions feature the
neurons responsible for upper and lower limb motor function. Testing of these regions
may result in slightly different stress-strain distributions.
4) MRE has recently been used to evaluate the in-vivo mechanical properties of spinal cord
tissue [106]. This would be useful as the in-vivo mechanical properties are more
representative of spinal cord mechanical properties rather than the ex-vivo properties
measured here. Kruse et al. have only provided initial evidence to quantify the shear
stiffness of the spinal cord in-vivo using MRE. This work is ongoing and requires
validation. Future studies should explore the use of MRE in the hopes of quantifying the
in-vivo mechanical properties of spinal cord tissue.
5.4 Concluding Statement
The current research refutes the assumption of spinal cord homogeneity and isotropy when using
computational models to study SCI biomechanics. In order to accurately model the link between
spinal cord impact and the resulting tissue damage, the material properties of the spinal cord
need to be meticulously studied. Continued understanding of spinal cord material properties will
provide further understanding of SCI stress-strain states. Knowledge of tissue tolerances will
relate injury mechanisms to tissue damage patterns and ultimately to their respective pathologies.
This will promote the discovery of targeted therapies and treatments for SCI.

106
References
[1] V. K. Noonan et al., “Incidence and prevalence of spinal cord injury in Canada: A
national perspective,” Neuroepidemiology, vol. 38, no. 4, pp. 219–226, 2012.
[2] C. H. Tator, “REVIEW OF TREATMENT TRIALS IN HUMAN,” Neurosurgery, vol. 59,
no. 5, pp. 957–987, 2006.
[3] P. G. Popovich, S. Lemeshow, J. C. Gensel, and C. A. Tovar, “Independent evaluation of
the effects of glibenclamide on reducing progressive hemorrhagic necrosis after cervical
spinal cord injury,” Exp. Neurol., vol. 233, no. 2, pp. 615–622, 2012.
[4] J. T. Maikos, Z. Qian, D. Metaxas, and D. I. Shreiber, “Finite Element Analysis of Spinal
Cord Injury in the Rat,” J. Neurotrauma, vol. 25, no. 7, pp. 795–816, 2008.
[5] C. M. Russell, A. M. Choo, W. Tetzlaff, T.-E. Chung, and T. R. Oxland, “Maximum
Principal Strain Correlates with Spinal Cord Tissue Damage in Contusion and Dislocation
Injuries in the Rat Cervical Spine,” J. Neurotrauma, vol. 29, no. 8, pp. 1574–1585, 2012.
[6] C. Y. Greaves, M. S. Gadala, and T. R. Oxland, “A three-dimensional finite element
model of the cervical spine with spinal cord: An investigation of three injury
mechanisms,” Ann. Biomed. Eng., vol. 36, no. 3, pp. 396–405, 2008.
[7] N. Nishida et al., “Stress analysis of the cervical spinal cord: Impact of the morphology of
spinal cord segments on stress,” J. Spinal Cord Med., vol. 39, no. 3, pp. 327–334, 2016.
[8] S. Jannesar, B. Nadler, and C. J. Sparrey, “The Transverse Isotropy of Spinal Cord White
Matter Under Dynamic Load,” J. Biomech. Eng., vol. 138, no. 9, p. 091004, 2016.
[9] L. J. Smith, N. L. Nerurkar, K. Choi, B. D. Harfe, and D. M. Elliott, “Degeneration and
regeneration of the intervertebral disc: lessons from development,” Dis. Model. Mech.,
vol. 4, pp. 31–41, 2011.
[10] T. A. Cho, “Spinal Cord Functional Anatomy,” Contin. J., vol. 21, no. 1, pp. 13–35, 2015.
[11] D. E. Koser, E. Moeendarbary, J. Hanne, S. Kuerten, and K. Franze, “CNS cell
distribution and axon orientation determine local spinal cord mechanical properties,”
Biophys. J., vol. 108, no. 9, pp. 2137–2147, 2015.
[12] N. S. C. I. S. Center, “Spinal Cord Injury (SCI) 2016 Facts and Figures at a Glance,” J.
Spinal Cord Med., vol. 39, no. 4, pp. 493–494, 2016.
[13] Y. Chen, Y. He, and M. J. DeVivo, “Changing Demographics and Injury Profile of New
Traumatic Spinal Cord Injuries in the United States, 1972–2014,” Arch. Phys. Med.
Rehabil., vol. 97, no. 10, pp. 1610–1619, 2016.
[14] L. H. Sekhon and M. G. Fehlings, “Epidemiology, demographics, and pathophysiology of
acute spinal cord injury,” Spine (Phila Pa 1976), vol. 26, no. 24 Suppl, pp. S2-12, 2001.
[15] R. Salewski, H. Emrani, and M. G. Fehlings, “Neural Stem/Progenitor Cells for Spinal
Cord Regeneration,” Intech, p. 13, 2013.

107
[16] T. Choo, Anthony, Liu, Jie, Lam, Clarrie, Dvorak, Marcel, Tetzlaff, Wolfram, Oxland,
Thomas “Contusion, dislocation, and distraction: primary hemorrhage and membrane
permeability in distinct mechanisms of spinal cord injury,” J. Neurosurg. Spine, vol. 6, pp.
255–266, 2007.
[17] R. J. Fiford, L. E. Bilston, P. Waite, and J. Lu, “A Vertebral Dislocation Model of Spinal
Cord Injury in Rats,” J. Neurotrauma, vol. 21, no. 4, pp. 451–458, 2004.
[18] D. H. Noyes, “Correlation between parameters of spinal cord impact and resultant injury,”
Exp. Neurol., vol. 95, no. 3, pp. 535–547, 1987.
[19] C. J. Sparrey, A. M. Choo, J. Liu, W. Tetzlaff, and T. R. Oxland, “The distribution of
tissue damage in the spinal cord is influenced by the contusion velocity,” Spine (Phila. Pa.
1976)., vol. 33, no. 22, pp. 812–819, 2008.
[20] P. A. Kearney, S. A. Ridella, D. C. Viano, and T. E. Anderson, “Interaction of Contact
Velocity and Cord Compression in Determining the Severity of Spinal Cord Injury,” J.
Neurotrauma, vol. 5, no. 3, pp. 187–208, 1988.
[21] J. R. Dimar, S. D. Glassman, G. H. Raque, Y. P. Zhang, and C. B. Shields, “The influence
of spinal canal narrowing and timing of decompression on neurologic recovery after spinal
cord contusion in a rat model,” Spine (Phila. Pa. 1976)., vol. 24, no. 16, pp. 1623–1633,
1999.
[22] C. J. Lam, P. Assinck, J. Liu, W. Tetzlaff, and T. R. Oxland, “Impact Depth and the
Interaction with Impact Speed Affect the Severity of Contusion Spinal Cord Injury in
Rats,” J. Neurotrauma, vol. 31, pp. 1985–1997, 2014.
[23] E. C. Clarke et al., “Anterior fracture-dislocation is more severe than lateral: A
biomechanical and neuropathological comparison in rat thoracolumbar spine,” J.
Neurotrauma, vol. 25, no. 4, pp. 371–383, 2008.
[24] J. Speidel, “The Effect of Velocity and Timing of Residual Compression in a Rodent
Dislocation Spinal Cord Injury Model,” University of British Columbia, 2018.
[25] J. Kjell and L. Olson, “Rat models of spinal cord injury: From pathology to potential
therapies,” DMM Dis. Model. Mech., vol. 9, no. 10, pp. 1125–1137, 2016.
[26] J. Gomes-Osman, M. Cortes, J. Guest, and A. Pascual-Leone, “A systematic review of
experimental strategies aimed at improving motor function after acute and chronic spinal
cord injury,” J. Neurotrauma, vol. 33, no. 5, pp. 425–438, 2016.
[27] J. A. Gruner, “A Monitored Contusion Model of Spinal Cord Injury in the Rat,” J.
Neurotrauma, vol. 9, no. 2, pp. 123–128, 1992.
[28] C. Watson, G. Paxinos, G. Kayalioglu, and C. Heise, Atlas of the Rat Spinal Cord.
Elsevier Ltd, 2009.
[29] J. H. T. Lee et al., “A Novel porcine model of traumatic thoracic spinal cord injury,” J.
Neurotrauma, vol. 30, no. 3, pp. 142–159, 2013.
[30] K. T. Kim et al., “Review of the UBC porcine model of traumatic spinal cord injury,” J.

108
Korean Neurosurg. Soc., vol. 61, no. 5, pp. 539–547, 2018.
[31] B. K. Kwon, J. Hillyer, and W. Tetzlaff, “Translational research in spinal cord injury: A
survey of opinion from the SCI community,” J. Neurotrauma, vol. 27, no. 1, pp. 21–33,
2010.
[32] C. F. Jones, S. G. Kroeker, P. A. Cripton, and R. M. Hall, “The effect of cerebrospinal
fluid on the biomechanics of spinal cord: An ex vivo bovine model using bovine and
physical surrogate spinal cord,” Spine (Phila. Pa. 1976)., vol. 33, no. 17, pp. 580–588,
2008.
[33] T. Cheriyan et al., “Spinal cord injury models: A review,” Spinal Cord, vol. 52, no. 8, pp.
588–595, 2014.
[34] A. M. Te Choo, J. Liu, Z. Liu, M. Dvorak, W. Tetzlaff, and T. R. Oxland, “Modeling
spinal cord contusion, dislocation, and distraction: Characterization of vertebral clamps,
injury severities, and node of Ranvier deformations,” J. Neurosci. Methods, vol. 181, no.
1, pp. 6–17, 2009.
[35] D. . Bresnahan, J.C, Beattie, M.S, Todd III, F.D, Noyes, “A Behavioral and Anatomical
Analysis of Spinal Cord Injury Produced by a Feedback-Controlled Impaction Device,”
vol. 570, pp. 548–570, 1987.
[36] A. R. Allen, “SURGERY OF EXPERIMENTAL LESION OF SPINAL CORD
EQUIVALENT TO CRUSH INJURY OF FRACTURE DISLOCA- TION OF SPINAL
COLUMN,” Surgery, no. 11, pp. 878–880, 1911.
[37] S. Mattucci, “A BIOMECHANICAL INVESTIGATION OF A DISLOCATION SPINAL
CORD,” University of British Columbia, 2017.
[38] S. G. Sjovold et al., “Histological effects of residual compression sustained for 60 minutes
at different depths in a novel rat spinal cord injury contusion model,” J. Neurotrauma, vol.
30, no. 15, pp. 1374–1384, 2013.
[39] T. Bhatnagar, J. Liu, and T. Oxland, “Characterization of a Novel, Magnetic Resonance
Imaging-Compatible Rodent Model Spinal Cord Injury Device,” J. Biomech. Eng., vol.
136, no. 9, p. 095001, 2014.
[40] S. Cheng and L. E. Bilston, “Unconfined compression of white matter,” J. Biomech., vol.
40, no. 1, pp. 117–124, 2007.
[41] S. Jannesar et al., “Compressive mechanical characterization of non-human primate spinal
cord white matter,” Acta Biomater., vol. 74, pp. 260–269, 2018.
[42] L. E. Bilston and L. E. Thibault, “The Mechanical Properties of the Human Cervical
Spinal Cord In Vitro,” Ann. Biomed. Eng., vol. 24, pp. 67–74, 1996.
[43] R. J. Fiford and L. E. Bilston, “The mechanical properties of rat spinal cord in vitro,” J.
Biomech., vol. 38, no. 7, pp. 1509–1515, 2005.
[44] E. C. Clarke, S. Cheng, and L. E. Bilston, “The mechanical properties of neonatal rat
spinal cord in vitro, and comparisons with adult,” J. Biomech., vol. 42, no. 10, pp. 1397–

109
1402, 2009.
[45] Y. C. Fung, Biomechanics: Mechanical Properties of Living Tissues, Second. New York,
1993.
[46] S. L. Y. Woo, G. A. Johnson, and B. A. Smith, “Mathematical modeling of ligaments and
tendons,” J. Biomech. Eng., vol. 115, no. 4, pp. 468–473, 1993.
[47] C. J. Sparrey and T. M. Keaveny, “Compression behavior of porcine spinal cord white
matter,” J. Biomech., vol. 44, no. 6, pp. 1078–1082, 2011.
[48] S. L. Y. Woo, M. A. Gomez, and W. H. Akeson, “The time and history-dependent
Viscoelastic properties of the canine medial collateral ligament,” J. Biomech. Eng., vol.
103, no. 4, pp. 293–298, 1981.
[49] K. L. Troyer, D. J. Estep, and C. M. Puttlitz, “Viscoelastic effects during loading play an
integral role in soft tissue mechanics,” Acta Biomater., vol. 8, no. 1, pp. 234–243, 2012.
[50] J. Eisenfeld, V. C. Mow, and H. Lipshitz, “Mathematical analysis of stress relaxation in
articular cartilage during compression,” Math. Biosci., vol. 39, no. 1–2, pp. 97–112, 1978.
[51] H. W. Haslach, L. N. Leahy, P. Riley, R. Gullapalli, S. Xu, and A. H. Hsieh, “Solid-
extracellular fluid interaction and damage in the mechanical response of rat brain tissue
under confined compression,” J. Mech. Behav. Biomed. Mater., vol. 29, pp. 138–150,
2014.
[52] W. M. Mow, V.C., Kuei, S.C., Lai and C. G. Armstrong, “Biphasic Creep and Stress
Relaxation of Articular Cartilage in Compression : Theory and Experiments,” J. Biomech.
Eng., vol. 102, no. February 1980, pp. 73–84, 1980.
[53] C. Zhou, T. B. Khalil, and A. I. King, “A new model comparing impact responses of the
homogeneous and inhomogeneous human brain,” SAE Tech. Pap., no. 1982, 1995.
[54] C. Zhou, T. B. Khalil, and A. I. King, “Shear stress distribution in the porcine brain due to
rotational impact,” SAE Tech. Pap., vol. 1, no. 1991, 1994.
[55] J. H. McElhaney, J. W. Melvin, V. L. Roberts, and H. D. Portnoy, “Dynamic
Characteristics of the Tissues of the Head,” in Perspectives in Biomedical Engineering,
1973.
[56] Y. Feng, R. J. Okamoto, R. Namani, G. M. Genin, and P. V. Bayly, “Measurements of
mechanical anisotropy in brain tissue and implications for transversely isotropic material
models of white matter,” J. Mech. Behav. Biomed. Mater., vol. 23, pp. 117–132, 2013.
[57] M. T. Prange and S. S. Margulies, “Regional, Directional, and Age-Dependent Properties
of the Brain Undergoing Large Deformation,” J. Biomech. Eng., vol. 124, no. 2, p. 244,
2002.
[58] L. R. Sharkey, “An Inverse Finite Element Approach to Modeling the Rat Cervical Spinal
Cord,” University of British Columbia, 2017.
[59] S. Ichihara, K; Taguchi, T; Sakuramoto, I; Kawano, S; Kawai, “Mechanism of the spinal
cord injury and the cervical spondylotic myelopathy: new approach based on the

110
mechanical features of the spinal cord white and gray matter,” vol. 99, no. Spine 3, pp.
278–285, 2003.
[60] M. K. S. Ozawa, H; Matsumoto, T; Ohashi, T; Sato, “Comparison of spinal cord gray
matter and white matter softness: measurement by pipette aspiration method,” J
Neurosurg (Spine 2), vol. 95, pp. 221–224, 2001.
[61] A. Gefen and S. S. Margulies, “Are in vivo and in situ brain tissues mechanically
similar?,” J. Biomech., vol. 37, no. 9, pp. 1339–1352, 2004.
[62] R. J. Oakland, R. M. Hall, R. K. Wilcox, and D. C. Barton, “The biomechanical response
of spinal cord tissue to uniaxial loading,” Proc. Inst. Mech. Eng. Part H J. Eng. Med., vol.
220, pp. 489–492, 2006.
[63] K. Ichihara, T. Taguchi, Y. Shimada, I. Sakuramoto, S. Kawano, and S. Kawai, “Gray
matter of the bovine cervical spinal cord is mechanically more rigid and fragile than the
white matter.,” J. Neurotrauma, vol. 18, no. 3, pp. 361–367, 2001.
[64] G.-L. Chang, T.-K. Hung, and W. W. Feng, “An in-vivo measurement and analysis of
viscoelstic properties of the spinal cord of cats,” J. Biomech. Eng., vol. 110, no. May
1988, pp. 155–122, 1988.
[65] T. Hung and G. Chang, “Biomechanical and Neurological Response of the Spinal Cord of
a Puppy to Uniaxial Tension,” J. Biomech. Eng., vol. 103, no. February 1981, 1981.
[66] G. L. Chang, T. K. Hung, a Bleyaert, and P. J. Jannetta, “Stress-strain measurement of the
spinal cord of puppies and their neurological evaluation.,” The Journal of trauma, vol. 21,
no. 9. pp. 807–10, 1981.
[67] C. M. Shetye, Snehal , Troyer, Kevin, Streijger, Femke, Lee, Jae H.T., Kwon, Brian K.,
Cripton, Peter, Puttlitz, Christian “Nonlinear Viscoelastic Characterization of the Porcine
Spinal Cord,” vol. 10, no. 2, pp. 792–797, 2014.
[68] M. D. Buschmann, J. Soulhat, A. Shirazi-adl, J. S. Jurvelin, and E. B. Hunziker,
“Confined compression of articular cartilage : Linearity in ramp and sinusoidal tests and
the importance of interdigitation and incomplete confinement,” J. Biomech., vol. 31, pp.
171–178, 1998.
[69] M. R. Disilvestro and J. F. Suh, “A cross-validation of the biphasic poroviscoelastic model
of articular cartilage in unconfined compression , indentation , and confined
compression,” J. Biomech., vol. 34, no. 4, pp. 519–525, 2001.
[70] S. Takahira Aoki, Toshiro, Ohashi, Takeo, Matsumoto, Masaaki, “The Pipette Aspiration
Applied to the Local Stiffness Measurement of Soft Tissues,” Ann. Biomed. Eng., vol. 25,
pp. 581–587, 1997.
[71] S. Budday et al., “Mechanical characterization of human brain tissue,” Acta Biomater.,
vol. 48, pp. 319–340, 2017.
[72] Lynne E Bilston, Neural Tissue Biomechanics, vol. 3. 2011.
[73] N. L. Ramo et al., “Comparison of in vivo and ex vivo viscoelastic behavior of the spinal

111
cord,” Acta Biomater., vol. 68, pp. 78–89, 2018.
[74] A. Garo, M. Hrapko, J. A. W. Van Dommelen, and G. W. M. Peters, “Towards a reliable
characterisation of the mechanical behaviour of brain tissue : The effects of post-mortem
time and sample preparation,” Biorheology, vol. 44, pp. 51–58, 2007.
[75] M. Frisén, M. Mägi, L. Sonnerup, and A. Viidik, “Rheological analysis of soft
collagenous tissue,” J. Biomech., vol. 2, no. 1, pp. 21–28, 1969.
[76] G. B. Shellswell, D. J. Restall, V. C. Duance, and A. J. Bailey, “Identification and
Differential Distribution of Collagen Types in the,” North-holl. Biomed. Press, vol. 106,
no. 2, pp. 305–308, 1979.
[77] E. L. Mazuchowski and L. E. Thibault, “Biomechanical Properties of the Human Spinal
Cord and Pia Mater,” Summer Bioeng. Conf., no. 1, p. 1205, 2003.
[78] S. Chatelin, C. Deck, and R. Willinger, “An anisotropic viscous hyperelastic constitutive
law for brain material finite-element modeling,” J. Biorheol., vol. 27, no. 1–2, pp. 26–37,
2013.
[79] V. C. Mow, S. C. Kuei, W. M. Lai, and C. G. Armstrong, “Biphasic Creep and Stress
Relaxation of Articular Cartilage in Compression: Theory and Experiments,” J. Biomech.
Eng., vol. 102, no. 1, p. 73, 1980.
[80] W. M. Lai, V. C. Mow, and V. Roth, “Effects of Nonlinear Strain-Dependent Permeability
and Rate of Compression on the Stress Behavior of Articular Cartilage,” J. Biomech. Eng.,
vol. 103, no. 2, p. 61, 1981.
[81] M. R. Disilvestro, “Biphasic Poroviscoelastic Behavior of Hydrated Biological,” J. Appl.
Mech., vol. 66, no. June 1999, pp. 1–8, 1999.
[82] S. Kwo, W. Young, and V. Decrescito, “Spinal Cord Sodium , Potassium , Calcium , and
Water Concentration Changes in Rats After Graded Contusion Injury,” J. Neurotrauma,
vol. 6, no. 1, pp. 13–24, 1989.
[83] T. Bhatnagar, J. Liu, A. Yung, P. A. Cripton, P. Kozlowski, and T. Oxland, “In Vivo
Measurement of Cervical Spinal Cord Deformation During Traumatic Spinal Cord Injury
in a Rodent Model,” Ann. Biomed. Eng., vol. 44, no. 4, pp. 1285–1298, 2016.
[84] B. Galle, H. Ouyang, R. Shi, and E. Nauman, “A transversely isotropic constitutive model
of excised guinea pig spinal cord white matter,” J. Biomech., vol. 43, no. 14, pp. 2839–
2843, 2010.
[85] J. L. Schmidt et al., “Measurement of anisotropic mechanical properties in porcine brain
white matter ex vivo using magnetic resonance elastography,” J. Mech. Behav. Biomed.
Mater., vol. 79, no. December 2017, pp. 30–37, 2018.
[86] F. Gervaso, G. Pennati, and F. B. Ã, “Effect of geometrical imperfections in confined
compression tests on parameter evaluation of hydrated soft tissues,” J. Biomech., vol. 40,
pp. 3041–3044, 2007.
[87] M. A. Soltz and G. A. Ateshian, “Experimental verification and theoretical prediction of

112
cartilage interstitial fluid pressurization at an impermeable contact interface in confined
compression,” J. Biomech., vol. 31, pp. 927–934, 1998.
[88] S. G. Kroeker, P. L. Morley, C. F. Jones, L. E. Bilston, and P. A. Cripton, “The
development of an improved physical surrogate model of the human spinal cord —
Tension and transverse compression,” J. Biomech., vol. 42, pp. 878–883, 2009.
[89] C. J. Sparrey and T. M. Keaveny, “The Effect of Flash Freezing on Variability in Spinal
Cord Compression Behavior,” J. Biomech. Eng., vol. 131, no. 11, p. 111010, 2009.
[90] T. Atsutaka, H. Sadayuki, W. Isao, K. Nagayama, and M. Takeo, “Mechanical
Characterization of Brain Tissue in High-Rate Compression Mechanical Characterization
of Brain Tissue,” J. Biomech. Sci. Eng., vol. 2, no. 3, pp. 115–126, 2007.
[91] J. Cohen, Statistical Power Analysis for the Behaviorial Sciences, Second. Lawrence
Erlbaum Associates, 1977.
[92] L. Kuramoto, “Power and Sample Size.” Vancouver Coastal Health Reasearch Institute,
Vancouver, pp. 1–37.
[93] A. Ghasemi and S. Zahediasl, “Normality tests for statistical analysis: A guide for non-
statisticians,” Int. J. Endocrinol. Metab., vol. 10, no. 2, pp. 486–489, 2012.
[94] M. J. Blanca, R. Alarcón, J. Arnau, R. Bono, and R. Bendayan, “Non-normal Data: Is
ANOVA still a Valid Option?,” Psicothema, vol. 29, no. 4, pp. 552–557, 2017.
[95] J. L. Gastwirth, Y. R. Gel, and W. Miao, “The Impact of Levene’s Test of Equality of
Variances on Statistical Theory and Practice,” Stat. Sci., vol. 24, no. 3, pp. 343–360, 2009.
[96] M. J. Blanca, R. Alarcón, J. Arnau, R. Bono, and R. Bendayan, “Effect of variance ratio
on ANOVA robustness: Might 1.5 be the limit?,” Behav. Res. Methods, vol. 50, no. 3, pp.
937–962, 2018.
[97] D. Sheskin, “Inferential Statistical Test Employed with Factorial Design (and Related
Measures of Association/Correlation),” in Handbook of Parametric and Nonparametric
Statistical Procedures, New York: Chapman & Hall/CRC, 1996, pp. 885–942.
[98] S. Kaczmarek, Mariusz, Subramaniam, R., Neff, “The Hydromechanics of
Hydrocephalus: Steady State Solutions for Cylindrical Geometry,” Bull. Math. Biol., vol.
59, no. 2, pp. 295–323, 1997.
[99] Y. B. Lu et al., “Viscoelastic properties of individual glial cells and neurons in the CNS,”
Proc. Natl. Acad. Sci. U. S. A., vol. 103, no. 47, pp. 17759–17764, 2006.
[100] Y. A. Ayala et al., “Rheological properties of cells measured by optical tweezers,” BMC
Biophys., vol. 9, no. 1, pp. 1–11, 2016.
[101] P. H. and G. P. J. Venton, S. Bouyagoub, “Deriving spinal cord permeability and porosity
using diffusion-weighted MRI data,” Poromechanics VI, vol. Proceeding, pp. 1451–1457,
2017.
[102] T. Duval et al., “NeuroImage In vivo mapping of human spinal cord microstructure at 300
mT / m,” Neuroimage, vol. 118, pp. 494–507, 2015.

113
[103] J. Duval, Tanguy, Saliani, Ariane, Nami, Harris, Nanci, Antonio, Stikov, Nikola, Leblond,
Hugues, Cohen-Adad, “Axons morphometry in the human spinal,” pp. 1–31, 2018.
[104] B. R. Gebart, “Permeability of Unidirectional Reinforcements for RTM,” J. Compos.
Mater., vol. 26, no. 8, pp. 1100–1133, 1992.
[105] M. Sarntinoranont, X. Chen, J. Zhao, and T. H. Mareci, “Computational model of
interstitial transport in the spinal cord using diffusion tensor imaging,” Ann. Biomed. Eng.,
vol. 34, no. 8, pp. 1304–1321, 2006.
[106] S. Kruse, a Kolipaka, a Manduca, and R. Ehman, “Feasibility of Evaluating the Spinal
Cord with MR Elastography,” Proc. 17th Sci. Meet. Int. Soc. Magn. Reson. Med., vol.
Honolulu, no. 5232, p. 629, 2009.

114
Appendix A – Engineering Drawings
Please note that the engineering drawings found in this Appendix are not final. The following
revisions were made:
- The indenter (Item No. 12) shown on GWMA-001 was discarded. Instead the magnetic
end effector shown in Section 2.1.1.5 was used.
- A carbon steel disc was taped to the top surface of GWMA-006 as shown in Section
2.1.1.4. The carbon steel disc was machined to have the same diameter as the head piece
of the shaft. This allowed the tape to be placed around the circumference of both parts.
- Drawing# GWMA-009 was discarded and instead the magnetic end effector shown in
Section 2.1.1.5 was used

115

116

117

118

119

120

121
Appendix B – Pilot Test Data in Air
Figure B-1: Pilot test data in air. The same strain rate and strain were implemented to
measure the background noise that is generated when there is no specimen within the
adapter. The increase in noise at the end is when the indenter is being removed from the
adapter causing a spike in load. This is not a part of the testing protocol

122
Appendix C – Load Cell Calibration
Table C-1: Load cell calibration using standard weights. The gain in the load cell was
adjusted based on the error
Mass (g) True Weight (N) % FS Measured Weight (N) % Error
52.68 0.52 5.17% 0.53 3.04%
102.07 1.00 10.01% 1.03 2.97%
153.08 1.50 15.02% 1.55 2.93%

123
Appendix D – Repeatability Analysis of Confined
Compression Apparatus
Figure D-1: Repeatability study using silicone specimen #1. Four confined compression
tests were performed and their load-time curves are shown. COV was calculated resulting
in 6% variability.

124
Figure D-2: Repeatability study using silicone specimen #2. Three additional confined
compression tests were performed and their load-time curves are shown. COV was
calculated resulting in 4% variability.

125
Appendix E – Specimen Testing Order
Table E-1: Specimen testing order for all pigs (n=11)
Pig # Block 1 Block 2
1 W W G G G G W W
A T A T T A T A
2 W W G G W W G G
T A T A A T A T
3 G G W W G G W W
A T A T T A T A
4 G G W W G G W W
T A T A A T A T
5 W W G G W W G G
T A A T A T T A
6 G G W W G G W W
T A A T A T T A
7 W W G G W W G G
A T T A T A A T
8 G G W W G G W W
A T T A T A A T
9 W W G G W W G G
A T A T T A T A
10 G G W W G G W W
A T A T T A T A
11 W W G G W W G G
T A T A A T A T
In the situation that more than two blocks can be tested in the six hour time window, the blocks
are repeated from block one.

126
Appendix F – Power Analysis
Table F-1: Power analysis (Part 1) calculation used to calculate minimum sample size for this thesis. The study by Prange &
Margulies, 2002 was used as reference [57]
Strain Shear Relaxation Modulus (Pa)
2.5% -
50% Gray Matter Corona Radiata Corpus Callosum
Relax
Time
(msec)
D1
(Axial)
Std
dev
D2
(Transverse)
Std
dev
D1
(axial)
Std
dev
D2
(Transverse)
Std
dev D1
Std
dev D2 Std dev
100.00 218.00 17.31 197.00 6.67 225.00 37.77 155.00 14.29 100.00 15.24 180.00 28.58
900.00 140.00 15.74 120.00 4.76 140.00 15.74 90.00 11.43 65.00 7.62 120.00 9.53
2500.00 120.00 15.74 95.00 2.86 115.00 15.74 80.00 6.67 55.00 2.86 110.00 14.29
abs(A
- T)
Std
Dev
(P)
Effect Size
(d)
abs(A
- T)
Std
Dev
(P)
Effect Size
(d)
abs(A
- T)
Std
Dev
(P)
Effect
Size
(d)
100.00 21.00 14.83 1.42 70.00 32.32 2.17 80.00 22.91 3.49
900.00 20.00 13.32 1.50 50.00 14.53 3.44 55.00 8.63 6.38
2500.00 25.00 13.15 1.90 35.00 13.57 2.58 55.00 10.31 5.34
Note: The nonmenclature used: A = Axial, T = Transverse, P = Pooled standard deviation, d = Effect Size.

127
Table F-2: Power analysis (Part 2) calculation used to calculate minimum sample size for this thesis. The study by Prange &
Margulies, 2002 was used as reference [57].
Using the T-distribution Table
Sample
Size 12.00 6.00 12.00 6.00 6.00 6.00
Dof 11.00 5.00 11.00 5.00 5.00 5.00
t (1-
alpha/2) 2.20 2.57 2.20 2.57 2.57 2.57
t (beta) -0.84 -0.84 -0.84 -0.84 -0.84 -0.84
Minimum Samples Req'd:
GA vs
GT
WA vs
WT
WA vs
WT
N
13.06 16.43 8.54 10.74 6.66 6.66
12.32 15.50 5.38 6.76 3.65 3.65
9.73 12.24 7.17 9.02 4.36 4.36
Minimum Samples Req'd:
GM vs
WM
abs(A
- T)
Std Dev
(P)
Effect
Size (d)
Sample
Size Dof
t(1-
alpha/2) t(beta) N
Grey
Matter 207.50 67.50 18.36 3.68 18.00 17.00 2.11 -0.84 4.73
Marginal
Means 130.00 37.50 11.74 3.19 5.45
107.50 25.00 12.13 2.06 8.45
White
Matter 140.00 12.00 11.00 2.20 -0.84 5.03
Marginal
Means 92.50 5.79
82.50 8.97

128
Appendix G – Constitutive Modeling Hand Calculations
Please note that the hand calculations shown here uses a 3 term Prony series.

129
Figure G-1: Hand calculations for the analytical solution to the constitutive model used to
model stress relaxation. The final solution for the ramp phase (Eq. 1) and the hold phase
(Eq. 2) are shown.

130
Appendix H – Constitutive Modeling Matlab Script
%Constants - Variable length to be changed depending on # of Excel
%Files
dia = 2; %Enter specimen diameter in mm
thk = [2.77 3]; %Enter specimen thickness in mm for all tests
t0 = [100 100 100 100 100 100 100 100]; %Enter time when loading -->
Relaxation
t1=(0:0.5:100)'; %Ensure this goes beyond t0
t2=(100:0.5:220)';
gam = abs(-0.001); %Strain Rate during loading phase
Strain = (0:0.0001:0.1)';
global index;
n = 50; %For plotting only; Plots every nth data point
c = [141.7988 17.3676 0.9903 0.1710]; %initial values for c -> doesn't matter
%initial values for c0 -> guess as close as possible
%# of rows depends on # of Excel Files
c0 =[
141.7988 17.3676 0.9903 0.1710
];
%Reading Multiple Excel Files - Change Folder Location if Necessary
Dir = 'C:\Users\Justin\Documents\University of British
Columbia\Research\Testing\Stress Relaxation Data\10 N Load Cell Trial\070419
- Euthanasia\GA\Raw Data';
Source = dir(fullfile(Dir,'*.csv'));
%variable bounds
for b = 1:length(Source)
ub(b,:) = [2000 100 1 101];
lb(b,:) = [0 0 0 0];
end

131
%linear constraints
% Inequality Constraints
% A & B material constants must be >= 0
% Time constants tau1 >= tau2 and tau2 >= tau3
% Equality Constraints
% Time constants tau1 = 1, tau2 = 10, tau3 = 100
% Gss + G1 + G2 + G3 = 1 at t = 0
A = [
-1 0 0 0;
0 -1 0 0;
0 0 1 0;
];
B = [0; 0; 1];
Aeq = [];
Beq = [];
%Main Body + Constitutive Modeling
for i = 1:length(Source)
F = fullfile(Dir,Source(i).name);
[Source(i).num,Source(i).txt,Source(i).raw] = xlsread(F);
Data{i} = Source(i).num(:,[2,4,5]);
Data{i}([1:45],:)=[];
Elem(i) = numel(Data{i}(:,1));
area = pi*(dia/1000)^2/4;
DispData{i} = Data{i}(:,2) - Data{i}(1,2) + thk;
Stress{i} = abs((Data{i}(:,3)-Data{i}(1,3))/area/1000); %in kPa
index = i;
J = [c0(i,:) i]; % Combining i with initial guesses to be brought into the
function
%Constitutive Modeling
[c(i,:),fval(i,:),exitflag(i,:)]=fmincon('qlvfitunworkinprogress1',c0(i,:),A,
B,Aeq,Beq,lb,ub); %Minimizes least squares in function – SEE BELOW FOR SCRIPT

132
%c =
constants
%fval = value
of the objective function (should be ~0)
%exitflag -
if equal to 1 then the solution converges
c
%Plotting the Data
figure(i)
subplot(3,1,1)
plot (Strain,abs(Stress{i}(1:1001,1)))
ylabel ('Stress (kPa)'); xlabel ('Strain');
subplot(3,1,2)
plot (Data{i}(:,1),abs(Stress{i}(:,1)))
ylabel ('Stress (kPa)'); xlabel ('Time (secs)');
subplot(3,1,3)
plot (Data{i}(:,1),abs(Stress{i}(:,1)))
ylabel ('Stress (kPa)'); xlabel ('Time (secs)');
hold on
for k = 1:201 %generating values for loading phase
sig{i}(k,1)=c(i,1)*c(i,2)*gam*...
(((1-c(i,3))*exp(c(i,2)*gam*t1(k,1))/(c(i,2)*gam)+...
c(i,3)*exp(c(i,2)*gam*t1(k,1))/(c(i,4)+c(i,2)*gam)...
)-...
((1-c(i,3))/(c(i,2)*gam)+...
c(i,3)*exp(-c(i,4)*t1(k,1))/(c(i,4)+c(i,2)*gam)...
));
end
hold on
plot(t1(:,1),sig{i}(:,1),'*')
hold on

133
for k = 1:241 %generating values for relaxation phase
sig2{i}(k,1)=c(i,1)*c(i,2)*gam*...
(((1-c(i,3))*exp(c(i,2)*gam*t0(i))/(c(i,2)*gam)+...
c(i,3)*exp(-
c(i,4)*t2(k,1))*exp((c(i,4)+c(i,2)*gam)*t0(i))/(c(i,4)+c(i,2)*gam)...
)-...
((1-c(i,3))/(c(i,2)*gam)+...
c(i,3)*exp(-c(i,4)*t2(k,1))/(c(i,4)+c(i,2)*gam)...
));
end
plot(t2(:,1),sig2{i}(:,1),'*')
legend('Experimental','QLV-Loading','QLV-Relaxation');
StressDiscrete{i} = [Stress{i}(750,1),750;
Stress{i}(800,1),800;
Stress{i}(900,1),900;
Stress{i}(1000,1),1000;
max(Stress{i}),find(Stress{i}==max(Stress{i}),1,'last')];
%Collects discrete points for peak stress and
%stiffness calculation
StressFinal{i} = c(i,1)*c(i,2)*gam*...
((1-c(i,3))*exp(c(i,2)*gam*t0(i))/(c(i,2)*gam)-...
((1-c(i,3))/(c(i,2)*gam)));
%Calculates the equilibrium stress as t --> infinity
Stiffness{i}=[
(StressDiscrete{i}(4,1)-StressDiscrete{i}(1,1))/...
((StressDiscrete{i}(4,2)-StressDiscrete{i}(1,2))/10000);
(StressDiscrete{i}(4,1)-StressDiscrete{i}(2,1))/...
((StressDiscrete{i}(4,2)-StressDiscrete{i}(2,2))/10000);
(StressDiscrete{i}(4,1)-StressDiscrete{i}(3,1))/...
((StressDiscrete{i}(4,2)-StressDiscrete{i}(3,2))/10000)
];

134
%Calculates the Modulus based on Stress/Strain
end
%Truncating + Average + Standard Deviation
truncate = min(Elem);
for b = 1:length(Source)
Datatimemod{b} = Data{b}(1:truncate,1);
Datatimemat(:,b) = cell2mat(Datatimemod(b));
Dataloadmod{b} = Data{b}(1:truncate,3);
Dataloadmat(:,b) = cell2mat(Dataloadmod(b));
stressmod{b} = Stress{b}(1:truncate,1);
stressmat(:,b) = cell2mat(stressmod(b));
stiffnessraw(:,b) = (stressmod{b}(1000,1)-stressmod{b}(900,1))/...
((1000-900)/10000);
end
for bb = 1:truncate
Dataloadmean(bb,1) = mean(Dataloadmat(bb,:));
Dataloadstddev(bb,1) = std(Dataloadmat(bb,:));
stressmean(bb,1) = mean(stressmat(bb,:));
stressstddev(bb,1) = std(stressmat(bb,:));
end
stresspeakstddev = stressstddev(1000,1);
stiffnessstddev = std(stiffnessraw);

135
Non Linear Least Squares Optimization Function
function H = qlvfitunworkinprogress(c)
dia = 2; %Enter specimen diameter in mm
area = pi*(dia/1000)^2/4;
%c = [1 1 1 1 1 1 1 1];
t0 = [100 100 100 100 100 100 100 100]; %t0 where Loading phase transitions
to Relaxation phase
%Length of vector depends on # of
%Excel Files in Folder
gam = abs(-0.001); %Strain Rate during loading phase
global index;
%index = 1;
f1{index}(1,:) = [0.]; %initial values for f1 and f2
f2{index}(1,:) = [0.];
Dir = 'C:\Users\Justin\Documents\University of British
Columbia\Research\Testing\Stress Relaxation Data\10 N Load Cell Trial\061019
- Euthanasia\WT';
Source = dir(fullfile(Dir,'*.csv'));
%ii = int8(J(10))
%c = J(1:9);
F = fullfile(Dir,Source(index).name);
[Source(index).num,Source(index).txt,Source(index).raw] = xlsread(F);
Data{index} = Source(index).num(:,[2,4,5]);
Data{index}([1:45],:)=[];
Data{index} = Data{index}';
Stress{index} = abs((Data{index}(3,:)-Data{index}(3,1))/area)/1000; %Units in
kPa
for j = 1:1000 %Length = # of data points in loading phase
t1{index}(1,j)=Data{index}(1,j); %Putting tramp into a column vector

136
%Calculating least squares sum for loading phase
f1{index}(1,:) = f1{index}(1,:)+(c(1)*c(2)*gam*...
(((1-c(3))*exp(c(2)*gam*t1{index}(1,j))/(c(2)*gam)+...
c(3)*exp(c(2)*gam*t1{index}(1,j))/(c(4)+c(2)*gam)...
)-...
((1-c(3))/(c(2)*gam)+...
c(3)*exp(-c(4)*t1{index}(1,j))/(c(4)+c(2)*gam)...
))-...
Stress{index}(1,j))^2;
end
for k = 1:1200 %Length = # of data points in relaxation phase
%MatLab is only allowing a total of 3865 points due to
%air file
t2{index}(1,k)=Data{index}(1,k+1000); %Putting time into t variable
%Calculating least squares sum for relaxation phase
f2{index}(1,:) = f2{index}(1,:)+(c(1)*c(2)*gam*...
(((1-c(3))*exp(c(2)*gam*t0(index))/(c(2)*gam)+...
c(3)*exp(-
c(4)*t2{index}(1,k))*exp((c(4)+c(2)*gam)*t0(index))/(c(4)+c(2)*gam)...
)-...
((1-c(3))/(c(2)*gam)+...
c(3)*exp(-c(4)*t2{index}(1,k))/(c(4)+c(2)*gam)...
))-...
Stress{index}(1,k+1000))^2;
end
f{index}(1,:) = f1{index}(1,:)+f2{index}(1,:); %Sum of least squares sum
of loading + relaxation data
% end
H = cell2mat(f)
index
end

137
Appendix I – Staining Protocols
Hemtoxylin & Eosin Staining Protocol
1. Xylene 2 – 5 minutes
2. Xylene 1 – 5 minutes
3. 100% EtOH – 3 minutes
4. 100% EtOH – 3 minutes
5. 95% EtOH - 3 minutes
6. 70% EtOH – 3 minutes
7. Distilled Water - 3 minutes
8. Distilled Water – 3minutes
9. Hematoxylin Gill 2x – 5 minutes
10. Water 3x – 1 minute/each
11. HCl (0.5% in 70% EtOH) – 10 seconds
12. Water 3x – 1 minute/each
13. NaHCO3 (1.5%) – 5 seconds
14. Water 3x – 1 minute/each
15. 95% EtOH – 2 minutes
16. Eosin Y – 15 seconds
17. 95% EtOH – 2 minutes
18. 100% EtOH – 2 minutes
19. 100% EtOH – 2 minutes
20. Xylene 1 – 2 minutes
21. Xylene 2 – 2 minutes

138
Eriochrome Cyanine (EC) Stain (for myelin)
Make 10% FeCl3
- 33g FeCl3 ∙ 6H2O (= 5g FeCl3) in 50ml dH2O
- keep the rest in the falcon tube for later use
Make EC stain
- add 0.08g EC in 40mL dH2O with 200uL H2SO4
- add 2mL 10% FeCl3, top up to 50mL
- filter into brown bottle
- can reuse stain
- Store at RT
Make 0.5% NH4OH (for differentiation)
- 1M stock solution is 3.5%
- dilute 1 in 7
- make fresh if over 1 week old
1. Thaw slides 1hr
2. Xylene II (in fumehood) 5 min
3. Xylene I (in fumehood) 5 min
4. 100% EtOH 2 min
5. 90% EtOH 2 min
6. 70% EtOH 2 min
7. 50% EtOH 2 min
8. dH2O 2 min
9. EC 10 min
10. dH2O rinse x 2
11. NH4OH ~ 2 min (until differentiation)
12. dH2O rinse x 2
13. 1% Neutral Red (only if you want a counter stain) 2 min

139
14. 50% EtOH 2 min
15. 70% EtOH 2 min
16. 90% EtOH 2 min
17. 100% EtOH 2 min
18. Xylene I (in fumehood) 2 min
19. Xylene II (in fumehood) 2 min
20. Coverslip with SHUR/mount (in fumehood)
Alcohol waste goes into alcohol waste can
Xylene waste goes into xylene recovery red can

140
Appendix J – Raw Data: Stress-time curves, Constitutive
Model Fit, Outcome Variables
Figure J-1: All stress-time plots for GA (a), GT (b), WA (c), and WT (d) specimens for all
11 pigs

141
Table J-1: Constitutive model material constants for GA, GT, WA, and WT specimens for
all pigs
Date Specimen A B g ꞇ Date Specimen A B g ꞇ
0610 GA 91.95 22.20 0.98 0.13 0911 GA 117.62 19.13 0.99 0.11
0610 GT 60.53 21.82 0.94 0.08 0911 GT 121.18 19.93 0.99 0.15
0610 WA 128.28 15.85 0.99 0.10 0911 WA 120.14 16.52 0.99 0.14
0610 WT 141.80 17.37 0.99 0.17 0911 WT 192.84 15.29 0.99 0.12
0626 GA 173.12 16.41 0.98 0.12 0913 GA 111.59 19.87 0.97 0.11
0626 GT 125.76 14.58 0.92 0.07 0913 GT 190.36 14.65 0.94 0.07
0626 WA 116.50 15.02 0.97 0.11 0913 WA 125.97 16.95 0.97 0.11
0626 WT 251.39 14.24 0.99 0.20 0913 WT 117.31 17.86 0.98 0.11
0627 GA 70.20 17.56 0.93 0.06
0627 GT 107.63 14.19 0.91 0.06
0627 WA 168.27 16.74 0.98 0.10
0627 WT 111.57 18.73 0.99 0.15
0704 GA 180.51 16.29 0.97 0.10
0704 GT 363.68 11.69 0.98 0.08
0704 WA 117.75 14.68 0.98 0.13
0704 WT 138.91 16.64 0.97 0.14
0718 GA 135.19 17.16 0.96 0.07
0718 GT 101.03 15.90 0.94 0.06
0718 WA 147.55 14.96 0.99 0.10
0718 WT 172.83 16.39 0.99 0.15
0808 GA 142.18 17.02 0.98 0.09
0808 GT 292.38 11.74 0.96 0.09
0808 WA 131.40 14.22 0.97 0.07
0808 WT 75.50 16.65 0.97 0.08
0813 GA 92.52 17.28 0.97 0.07
0813 GT 77.06 20.85 0.96 0.13
0813 WA 59.40 13.82 0.97 0.09
0813 WT 64.25 21.58 0.97 0.13
0904 GA 125.78 13.54 0.94 0.07
0904 GT 162.67 12.08 0.97 0.07
0904 WA 124.05 13.33 0.97 0.10
0904 WT 112.96 15.88 0.99 0.13
0909 GA 149.04 18.24 0.98 0.12
0909 GT 208.82 15.07 0.96 0.08
0909 WA 85.33 13.06 0.97 0.08
0909 WT 70.88 16.54 0.94 0.09

142
Figure J-2: Peak Stress between specimen types for all pig specimens tested
Figure J-3: Aggregate Modulus between specimen types for all pig specimens tested
0.00
20.00
40.00
60.00
80.00
100.00
120.00
140.00
160.00
180.00
200.00
Stre
ss (
kPa)
Average Peak Stress b/w tissue type
GA
GT
WA
WT
0.00
50.00
100.00
150.00
200.00
250.00
300.00
350.00
400.00
Mo
du
lus
(kP
a)
Average Aggregate Modulus (1 Term) b/w Tissue Type
GA
GT
WA
WT

143
Figure J-4: Time constant between specimen types for all pig specimens tested
0.000
2.000
4.000
6.000
8.000
10.000
12.000
14.000
16.000
18.000
Tim
e C
on
stan
t (s
ecs)
Average Time Constant (1 Term) b/w Specimens
GA
GT
WA
WT