
Mec¶anica y Ondas - fnl.usal.esfnl.usal.es/pilar/MyO/myo1t.pdf · Los elementos de longitud,...
225
Mec´ anica y Ondas Salamanca, Primer semestre
Transcript of Mec¶anica y Ondas - fnl.usal.esfnl.usal.es/pilar/MyO/myo1t.pdf · Los elementos de longitud,...

Mecanica y Ondas
Salamanca, Primer semestre

Indice
1 . Preliminares Matematicos 11. Sistemas de coordenadas ortonormales . . . . . . . . . . . . . . . . 1
1..1 Coordenadas cartesianas . . . . . . . . . . . . . . . . . . . . 21..2 Coordenadas cilındricas . . . . . . . . . . . . . . . . . . . . 51..3 Coordenadas esfericas . . . . . . . . . . . . . . . . . . . . . 9
2. Derivada de un vector . . . . . . . . . . . . . . . . . . . . . . . . . 113. Gradiente de un escalar . . . . . . . . . . . . . . . . . . . . . . . . . 124. Divergencia de un vector . . . . . . . . . . . . . . . . . . . . . . . . 13
4..1 Teorema de Gauss . . . . . . . . . . . . . . . . . . . . . . . 134..2 Integrales de volumen y superficie . . . . . . . . . . . . . . . 15
5. Rotacional de un vector . . . . . . . . . . . . . . . . . . . . . . . . 165..1 Teorema de Stokes . . . . . . . . . . . . . . . . . . . . . . . 165..2 Integrales de lınea . . . . . . . . . . . . . . . . . . . . . . . . 17
6. Laplaciana de un escalar . . . . . . . . . . . . . . . . . . . . . . . . 187. Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2 . Cinematica de una partıcula 331. Sobre la nocion de partıcula . . . . . . . . . . . . . . . . . . . . . . 33
1..1 Posicion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 331..2 Orbita y trayectoria . . . . . . . . . . . . . . . . . . . . . . 331..3 Velocidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . 341..4 Aceleracion . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2. Estudio de curvas en el espacio . . . . . . . . . . . . . . . . . . . . 352..1 Representacion analıtica de una curva . . . . . . . . . . . . . 352..2 Longitud de un arco de curva. Representacion intrınseca . . 362..3 Vector tangente . . . . . . . . . . . . . . . . . . . . . . . . . 362..4 Vector normal: Curvatura y cırculo osculador . . . . . . . . 372..5 Vector binormal: Torsion . . . . . . . . . . . . . . . . . . . . 37
3. Triedro intrınseco de una curva en el espacio . . . . . . . . . . . . . 383..1 Formulas de Frenet . . . . . . . . . . . . . . . . . . . . . . . 38
4. Componentes intrınsecas de la aceleracion . . . . . . . . . . . . . . 39
i

ii
5. Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3 . Movimiento de una partıcula en tres dimensiones: Fuerzas cen-trales 651. Movimiento de una partıcula en tres dimensiones . . . . . . . . . . 65
1..1 Segunda ley de Newton: Momento lineal . . . . . . . . . . . 661..2 Fuerzas conservativas: Conservacion de la energıa . . . . . . 661..3 Fuerzas centrales: Conservacion del momento angular . . . . 67
2. Potencial efectivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 672..1 Puntos de retroceso . . . . . . . . . . . . . . . . . . . . . . . 682..2 Estados ligados y estados de difusion . . . . . . . . . . . . . 68
3. El oscilador armonico tridimensional . . . . . . . . . . . . . . . . . 693..1 Resolucion en coordenadas cartesianas . . . . . . . . . . . . 693..2 Resolucion en coordenadas esfericas . . . . . . . . . . . . . . 70
4. Potencial de Coulomb . . . . . . . . . . . . . . . . . . . . . . . . . 744..1 Caso repulsivo . . . . . . . . . . . . . . . . . . . . . . . . . . 744..2 Caso Atractivo . . . . . . . . . . . . . . . . . . . . . . . . . 78
5. Seccion eficaz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 875..1 Concepto de seccion eficaz y seccion eficaz diferencial . . . . 875..2 Difusion por una esfera dura . . . . . . . . . . . . . . . . . . 905..3 Difusion de Rutherford . . . . . . . . . . . . . . . . . . . . . 915..4 Aproximacion de angulos pequenos . . . . . . . . . . . . . . 92
6. Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
4 . Mecanica de Lagrange y Hamilton 1371. Calculo de variaciones . . . . . . . . . . . . . . . . . . . . . . . . . 137
1..1 Funcionales integrales . . . . . . . . . . . . . . . . . . . . . . 1371..2 Principio variacional . . . . . . . . . . . . . . . . . . . . . . 1371..3 Ecuaciones de Euler-Lagrange . . . . . . . . . . . . . . . . . 138
2. Formulacion lagrangiana para sistemas potenciales . . . . . . . . . . 1392..1 Coordenadas generalizadas . . . . . . . . . . . . . . . . . . . 1392..2 Principio de Hamilton . . . . . . . . . . . . . . . . . . . . . 1402..3 Funcion de Lagrange . . . . . . . . . . . . . . . . . . . . . . 1402..4 Ecuaciones del movimiento . . . . . . . . . . . . . . . . . . . 1402..5 Terminos de la energıa cinetica . . . . . . . . . . . . . . . . 1412..6 Potencial: Fuerzas generalizadas . . . . . . . . . . . . . . . . 1422..7 Momentos generalizados . . . . . . . . . . . . . . . . . . . . 143
3. Sistemas con ligaduras . . . . . . . . . . . . . . . . . . . . . . . . . 1433..1 Ligaduras holonomas . . . . . . . . . . . . . . . . . . . . . . 1443..2 Ligaduras no holonomas . . . . . . . . . . . . . . . . . . . . 1443..3 Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
4. Formulacion Hamiltoniana . . . . . . . . . . . . . . . . . . . . . . . 146

iii
4..1 Funcion de Hamilton . . . . . . . . . . . . . . . . . . . . . . 1464..2 Ecuaciones de Hamilton . . . . . . . . . . . . . . . . . . . . 1474..3 Conservacion del Hamiltoniano . . . . . . . . . . . . . . . . 1474..4 Significado fısico del hamiltoniano . . . . . . . . . . . . . . . 148
5. Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
5 . Mecanica relativista 1831. Relatividad en la Mecanica clasica . . . . . . . . . . . . . . . . . . . 183
1..1 Transformaciones de Galileo . . . . . . . . . . . . . . . . . . 1831..2 La relatividad de Galileo . . . . . . . . . . . . . . . . . . . . 184
2. La mecanica clasica y La electrodinamica . . . . . . . . . . . . . . . 1853. La Teorıa del Eter . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
3..1 Experimento de Michelson Morley . . . . . . . . . . . . . . . 1863..2 Hipotesis de Fitzgerald: Experimento de Kennedy-Thorndike 1883..3 Hipotesis del arrastre del eter: aberracion estelar y experi-
mento de Fizeau . . . . . . . . . . . . . . . . . . . . . . . . 1894. Intentos de modificar el electromagnetismo: Experimento de De Sitter1905. Relatividad especial . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
5..1 Postulados basicos . . . . . . . . . . . . . . . . . . . . . . . 1915..2 Transformaciones entre sistemas inerciales . . . . . . . . . . 1915..3 Transformaciones de Lorentz . . . . . . . . . . . . . . . . . . 191
6. Consecuencias de la Relatividad especial . . . . . . . . . . . . . . . 1936..1 Composicion de velocidades . . . . . . . . . . . . . . . . . . 1936..2 Dilatacion temporal. Tiempo propio . . . . . . . . . . . . . 1936..3 Contraccion espacial . . . . . . . . . . . . . . . . . . . . . . 1946..4 Efecto Doppler relativista . . . . . . . . . . . . . . . . . . . 194
7. Espacio de Minkovski . . . . . . . . . . . . . . . . . . . . . . . . . . 1967..1 Conservacion del intervalo . . . . . . . . . . . . . . . . . . . 1967..2 Espacio-tiempo cuadridimensional . . . . . . . . . . . . . . . 196
8. La partıcula libre en relatividad especial . . . . . . . . . . . . . . . 1978..1 Lagrangiano relativista de la particula libre . . . . . . . . . 1978..2 Momento . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1988..3 Hamiltoniano relativista de la particula libre . . . . . . . . 1998..4 Partıculas con masa: Energıa en reposo . . . . . . . . . . . 1998..5 Energıa de las partıculas sin masa . . . . . . . . . . . . . . . 199
9. Interacciones relativistas . . . . . . . . . . . . . . . . . . . . . . . . 2009..1 Efecto Compton . . . . . . . . . . . . . . . . . . . . . . . . . 2009..2 Efecto Fotoelectrico . . . . . . . . . . . . . . . . . . . . . . . 2029..3 Emision de fotones . . . . . . . . . . . . . . . . . . . . . . . 2029..4 Absorcion de fotones . . . . . . . . . . . . . . . . . . . . . . 203
10. Problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204
Capıtulo 1 .
Preliminares Matematicos
1. Sistemas de coordenadas ortonormales
Sea u1, u2, u3 un sistema de ejes coordenados perpendiculares y sean ~j1,~j2,~j3los respectivos vectores unitarios. Un vector ~r sera, en este sistema:
~r = x1~j1 + x2
~j2 + x3~j3 (1.1)
Dado que, en general, los vectores unitarios (salvo en coordenadas cartesianas)varıan de un punto a otro (dependen de las coordenadas), la diferencial de ~r sera:
d~r = dx1~j1 + dx2
~j2 + dx3~j3 + x1d~j1 + x2d~j2 + x3d~j3 (1.2)
que es otro vector y por tanto ha de escribirse
d~r = dl1~j1 + dl2~j2 + dl3~j3 = hidui~ji (1.3)
donde el indice i recorre los valores 1,2 y 3.Las cantidades hi definidas como
dli = hidui (1.4)
son los parametros de escala que caracterizan a un sistema de coordenadas con-creto. Como puede verse, el problema reside basicamente en determinar las valoresd~ji de los vectores de la base.
Los elementos de longitud, superficie y volumen son por tanto:
elemento de lınea
• dl1 = h1du1 es el elemento de longitud cuando u2 y u3 permanecen constantes
• dl2 = h2du2 es el elemento de longitud cuando u1 y u3 permanecen constantes
1

2 Capıtulo 1
• dl3 = h3du3 es el elemento de longitud cuando u1 y u2 permanecen constantes
elemento de superficie
• dS1 = dl2dl3 = h2h3du2du3 es el elemento de superficie cuando u1 permanececonstante
• dS2 = dl1dl3 = h1h3du1du3 es el elemento de superficie cuando u2 permanececonstante
• dS3 = dl1dl2 = h1h2du1du2 es el elemento de superficie cuando u3 permanececonstante
elemento de volumen
dV = dl1dl2dl3 = h1h2h3du1du2du3
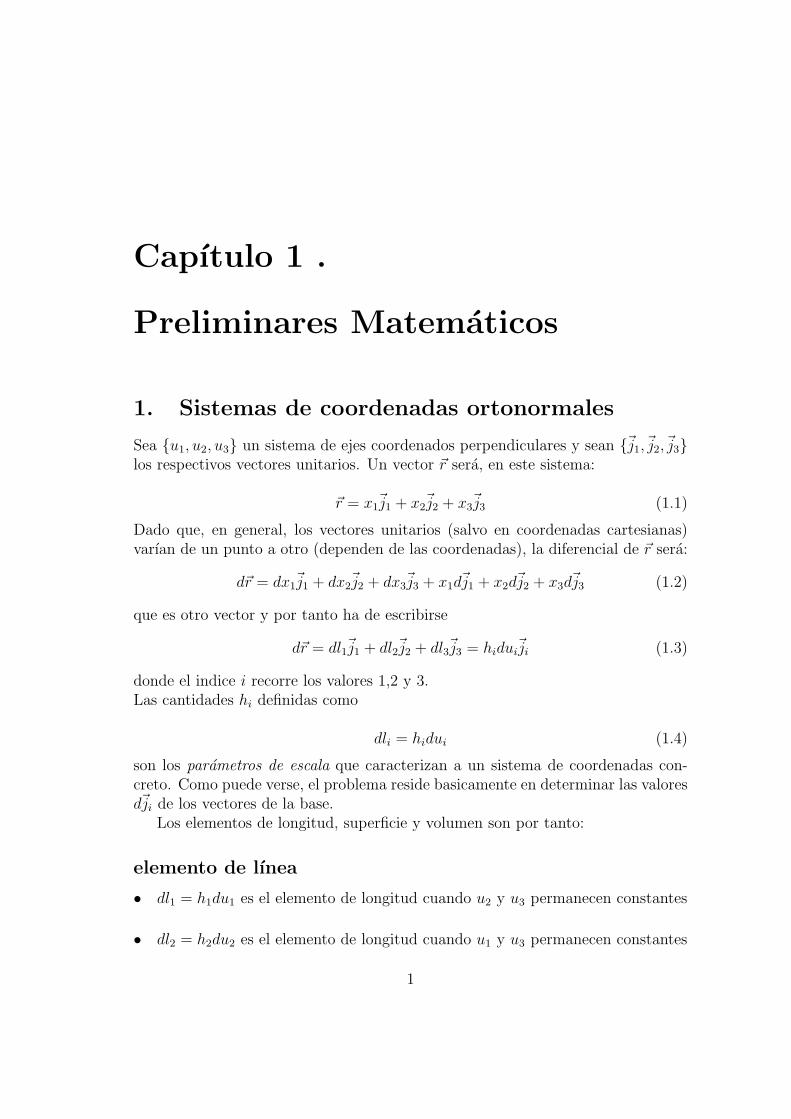
1..1 Coordenadas cartesianas
La nomenclatura usual es:
• coordenadas
u1, u2, u3 = x, y, z (1.5)
Preliminares Matematicos 3
• vectores unitarios
~j1,~j2,~j3 = ~i,~j,~k (1.6)
donde los vectores unitarios son tangentes a la direccion de variacion de las coor-denadas.

4 Capıtulo 1
• Vector posicion
~r = x~i + y~j + z~k (1.7)
• Variacion de los vectores unitarios
En este caso los vectores unitarios son constantes por lo que la variacion de ~r sedebe solo a la variacion de sus coordenadas
d~i = d~j = d~k = 0 (1.8)
• Variacion del vector posicion
d~r = dx~i + dy~j + dz~k (1.9)
• Parametros de escala
hx = hy = hz = 1 (1.10)

Preliminares Matematicos 5
• Elementos de lınea
dlx = dx
dly = dy
dlz = dz (1.11)
• Elementos de superficie
dSx = dydz
dSy = dxdz
dSz = dxdy (1.12)
• Elemento de volumen
dV = dxdydz (1.13)
1..2 Coordenadas cilındricas
La nomenclatura usual es:

6 Capıtulo 1
• coordenadas
ρ
ϕ
u1, u2, u3 = ρ, ϕ, z (1.14)
donde la relacion con las coordenadas cartesianas es
ρ =√
x2 + y2
ϕ = arctgy
xx = ρ cosϕ (1.15)
y = ρ senϕ
• vectores unitarios

Preliminares Matematicos 7
ρ
ϕ
~j1,~j2,~j3 = ~jρ,~jϕ, ~k (1.16)
Su relacion con los vectores cartesianos es:
~jρ = cos ϕ~i + sin ϕ~j ~i = cos ϕ~jρ − sin ϕ~jϕ
~jϕ = − sin ϕ~i + cos ϕ~j ~j = sin ϕ~jρ + cos ϕ~jϕ (1.17)
• Vector posicion
~r = ρ~jρ + z~k (1.18)
• Variacion de los vectores unitarios
d~jρ = dϕ~jϕ
d~jϕ = −dϕ~jρ (1.19)

8 Capıtulo 1
• Variacion del vector posicion
Puesto que este caso los vectores unitarios dependen de las coordenadas la variacionde ~r se debe tanto a la variacion de sus coordenadas como a la de los vectoresunitarios
d~r = dρ~jρ + ρdϕ~jϕ + dz~k (1.20)
• Parametros de escala
hρ = 1
hϕ = ρ
hz = 1 (1.21)
• Elementos de lınea
dlρ = dρ
dlϕ = ρdϕ
dlz = dz (1.22)
• Elementos de superficie
dSρ = ρdϕdz
dSϕ = dρdz
dSz = ρdρdϕ (1.23)
• Elemento de volumen
dV = ρdρdϕdz (1.24)

Preliminares Matematicos 9
1..3 Coordenadas esfericas
θ
ϕ
• coordenadas
u1, u2, u3 = r, ϕ, θdonde la relacion con las coordenadas cartesianas es
r =√
x2 + y2 + z2 x = r sin θ cosϕ
ϕ = arctg yx
y = r sin θ sin ϕ
θ = arcos zr
z = r cos θ (1.25)
• vectores unitarios
~j1,~j2,~j3 = ~jr,~jϕ,~jθ (1.26)
Su relacion con los vectores cartesianos es:
~jr = sin θ cos ϕ~i + sin θsenϕ~j + cos θ~k~jϕ = − sin ϕ~i + cos ϕ~j
~jθ = cos θ cos ϕ~i + cos θ sin ϕ~j − sin θ~k (1.27)

10 Capıtulo 1
~i = sin θ cos ϕ~jr + cos θ cos ϕ~jθ − sin ϕ~jϕ
~j = sin θ sin ϕ~jr + cos θ sin ϕ~jθ + cos ϕ~jϕ
~k = cos θ~jr − sin θ~jθ (1.28)
• Vector posicion
~r = r~jr (1.29)
• Variacion de los vectores unitarios
d~jr = senθdϕ~jϕ + dθ~jθ
d~jϕ = −dϕ(senθ~jr + cosθ~jθ)
d~jθ = −dθ~jr + cosθdϕ~jϕ (1.30)
• Variacion del vector posicionPuesto que este caso los vectores unitarios dependen de las coordenadas la variacionde ~r se debe tanto a la variacion de sus coordenadas como a la de los vectoresunitarios
d~r = dr~jr + rsenθdϕ~jϕ + rdθ~jθ (1.31)
• Parametros de escala
hr = 1
hϕ = r sin θ
hθ = r (1.32)
• Elementos de lınea
dlr = dr
dlϕ = r sin θdϕ
dlθ = rdθ (1.33)
• Elementos de superficie
dSr = r2 sin θdϕdθ
dSϕ = rdrdθ
dSz = r sin θdrdϕ (1.34)
Preliminares Matematicos 11
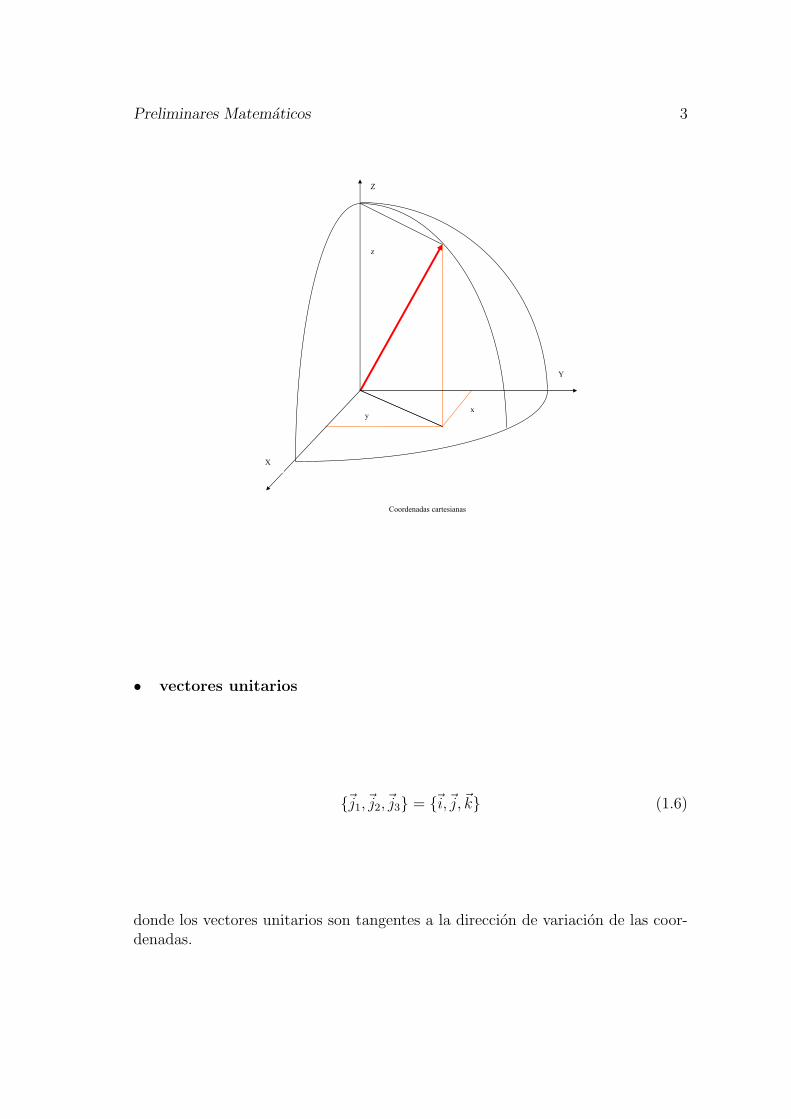
• Elemento de volumen
dV = r2 sin θdrdϕdθ (1.35)
2. Derivada de un vector
Sea ~A un vector que, en un determinado sistema de coordenadas ortonormalesu1, u2, u3, se escribe
~A = A1~j1 + A2
~j2 + A3~j3 (2.1)
y por tanto su derivada sera:
~dA = dA1~j1 + dA2
~j2 + dA3~j3 + A1d~j1 + A2d~j2 + A3d~j3 (2.2)
Teniendo en cuenta los resultados del apartado anterior las expresiones en losdistintos sistemas de referencia son:
• cartesianas~dA = dAx
~jx + dAy~jy + dAz
~jz (2.3)

12 Capıtulo 1
• polares
~dA = dAρ~jρ + dAϕ
~jϕ + dAz~k + Aρd~jρ + Aϕd~jϕ + Azd~k (2.4)
Utilizando las expresiones para las derivadas de los vectores unitarios:
~dA = (dAρ − Aϕdϕ)~jρ + (dAϕ + Aρdϕ)~jϕ + dAz~k (2.5)
• esfericas
~dA = dAr~jr + dAϕ
~jϕ + dAθ~jθ + Ard~jr + Aϕd~jϕ + Aθd~jθ (2.6)
Utilizando las expresiones para las derivadas de los vectores unitarios:
~dA = (dAr − Aϕsenθdϕ− Aθdθ)~jr +
(dAϕ + Ar sin θdϕ + Aθ cos θdϕ)~jϕ +
(dAθ + Ardθ − Aϕ cos θdϕ)~jθ (2.7)
3. Gradiente de un escalar
Sea un escalar B. Se define como gradiente de B y se denota ~∇B al vector queverifica:
dB = ~∇B. ~dr (3.1)
En un sistema de coordenadas ortonormales u1, u2, u3, ~∇B sera un vector de laforma:
~∇B = g1~j1 + g2
~j2 + g3~j3 (3.2)
Dado que como vimos anteriormente ~dr se escribe
~dr = h1du1~j1 + h2du2
~j2 + h3du3~j3 (3.3)
y que dB al ser la derivada de un escalar sera simplemente:
dB =∂B
∂u1
du1 +∂B
∂u2
du2 +∂B
∂u3
du3 (3.4)
Substituyendo (3.2-4) en (3.1) obtenemos:
∂B
∂u1
du1 +∂B
∂u2
du2 +∂B
∂u3
du3 = h1g1du1 + h2g2du2 + h3g3du3 (3.5)
luego las componentes de ~∇g son:
( ~∇B)i = gi =1
hi
∂B
∂ui
(3.6)

Preliminares Matematicos 13
Por tanto, teniendo en cuenta las expresiones de hi en los diferentes sistemas decoordanadas tenemos:
• cartesianas
~∇B =∂B
∂x~i +
∂B
∂y~j +
∂B
∂z~k (3.7)
• polares
~∇B =∂B
∂ρ~jρ +
1
ρ
∂B
∂ϕ~jϕ +
∂B
∂z~k (3.8)
• esfericas
~∇B =∂B
∂r~jr +
1
r sin θ
∂B
∂ϕ~jϕ +
1
r
∂B
∂θ~jθ (3.9)
4. Divergencia de un vector
4..1 Teorema de Gauss
Sea un vector ~A. Se define como divergencia de ~A al escalar que verifica elTeorema de Gauss:
∫
V
~∇. ~A dV =
∫
S
~A. ~dS (4.1)
14 Capıtulo 1
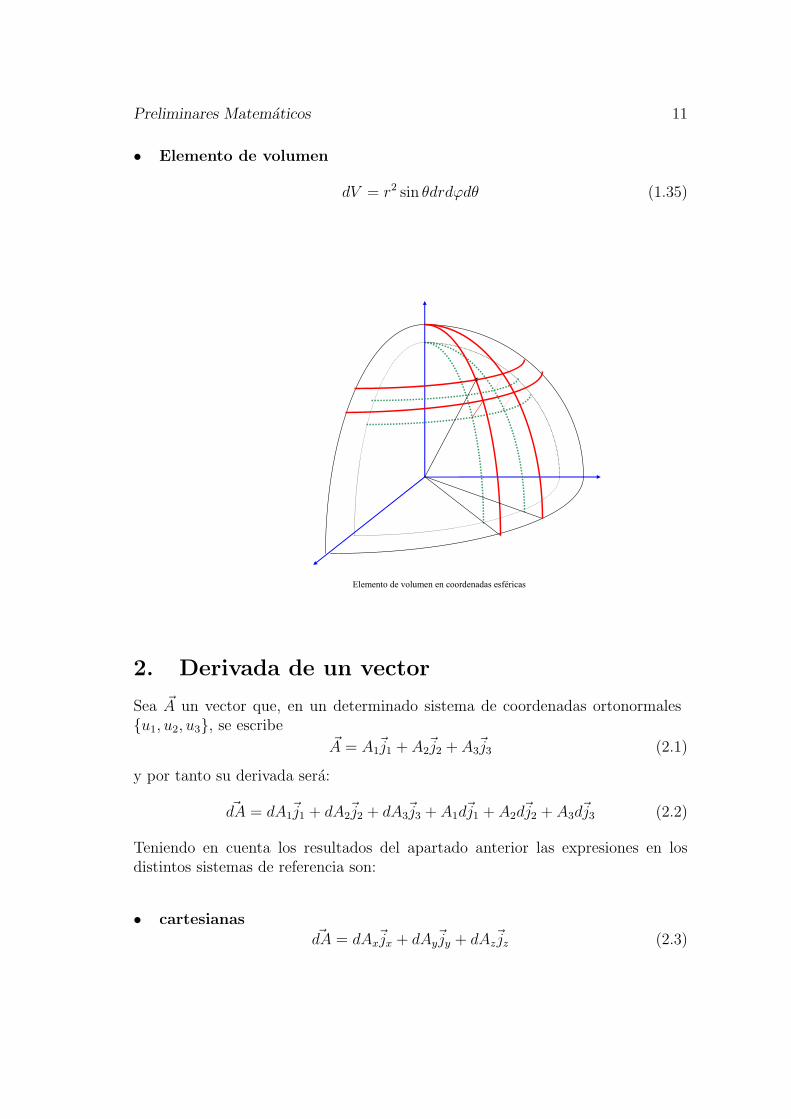
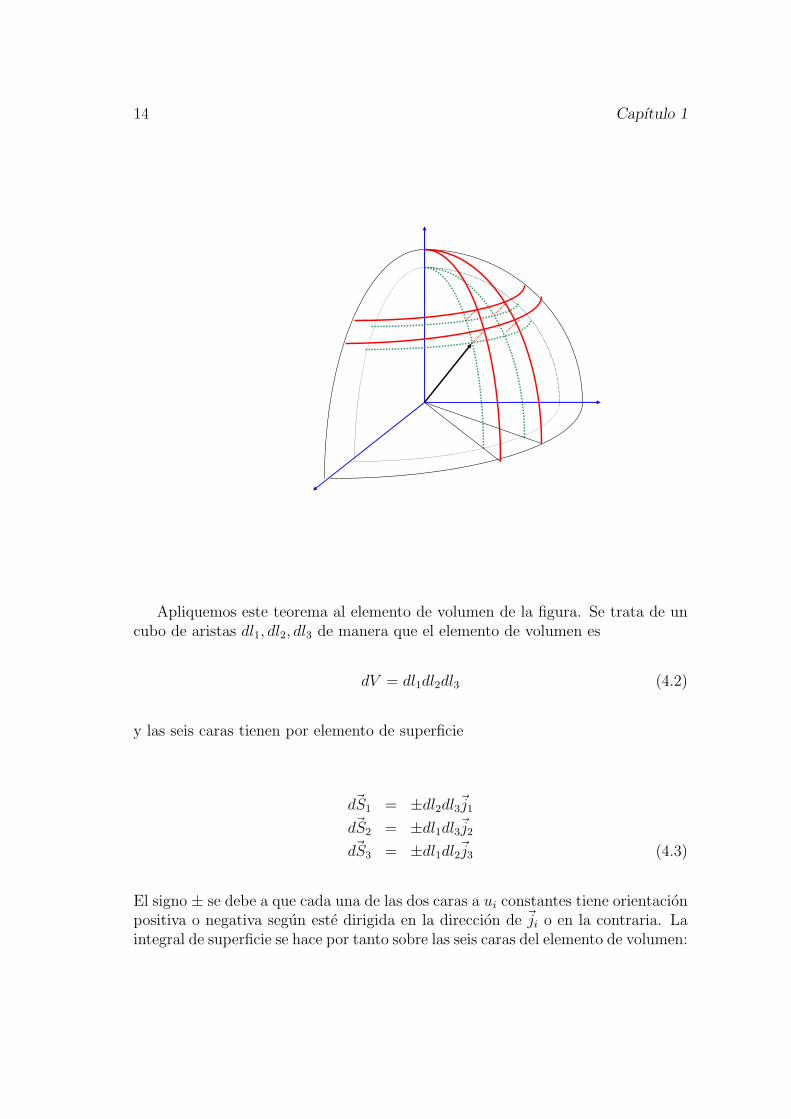
Apliquemos este teorema al elemento de volumen de la figura. Se trata de uncubo de aristas dl1, dl2, dl3 de manera que el elemento de volumen es
dV = dl1dl2dl3 (4.2)
y las seis caras tienen por elemento de superficie
~dS1 = ±dl2dl3~j1
~dS2 = ±dl1dl3~j2
~dS3 = ±dl1dl2~j3 (4.3)
El signo ± se debe a que cada una de las dos caras a ui constantes tiene orientacionpositiva o negativa segun este dirigida en la direccion de ~ji o en la contraria. Laintegral de superficie se hace por tanto sobre las seis caras del elemento de volumen:

Preliminares Matematicos 15
4..2 Integrales de volumen y superficie
∫
V
~∇. ~A dl1dl2dl3 =
∫
u1+du1=cte
A1dl2dl3 −∫
u1=cte
A1dl2dl3 +
∫
u2+du2=cte
A2dl1dl3 −∫
u2=cte
A2dl1dl3 +
∫
u3+du3=cte
A3dl1dl2 −∫
u3=cte
A3dl1dl2 (4.4)
Substituyendo los elementos de lınea
∫
V
~∇. ~Ah1h2h3du1du2du3 =
∫
u1+du1=cte
A1h2h3du2du3 −∫
u1=cte
A1h2h3du2du3 +
∫
u2+du2=cte
A2h1h3du1du3 −∫
u2=cte
A2h1h3du1du3 +
∫
u3+du3=cte
A3h1h2du1du2 −∫
u3=cte
A3h1h2du1du2
(4.5)
Teniendo en cuenta que
Aihjhk(ui + dui)− Aihjhk(ui) = dui∂(Aihjhk)
∂ui
(4.6)
la expresion anterior se escribe:
∫
V
~∇. ~Ah1h2h3du1du2du3 =
∫∂(A1h2h3)
∂u1
du1du2du3 +
∫∂(A2h1h3)
∂u2
du1du2du3 +
∫∂(A3h1h2)
∂u3
du1du2du3 (4.7)
de modo que, identificando los integrandos, tenemos:
~∇. ~A =1
h1h2h3
[∂(A1h2h3)
∂u1
+∂(A2h1h3)
∂u2
+∂(A3h1h2)
∂u3
](4.8)
Aplicando esta expresion a los distintos sistemas de coordenadas:• cartesianas
~∇. ~A =∂Ax
∂x+
∂Ay
∂y+
∂Az
∂z(4.9)
16 Capıtulo 1
• polares
~∇. ~A =1
ρ
[∂(ρAρ)
∂ρ+
∂Aϕ
∂ϕ+
∂(ρAz)
∂z
](4.10)
• esfericas
~∇. ~A =1
r2 sin θ
[∂(r2 sin θAr)
∂r+
∂(rAϕ)
∂ϕ+
∂(r sin θAθ)
∂θ
](4.11)
5. Rotacional de un vector
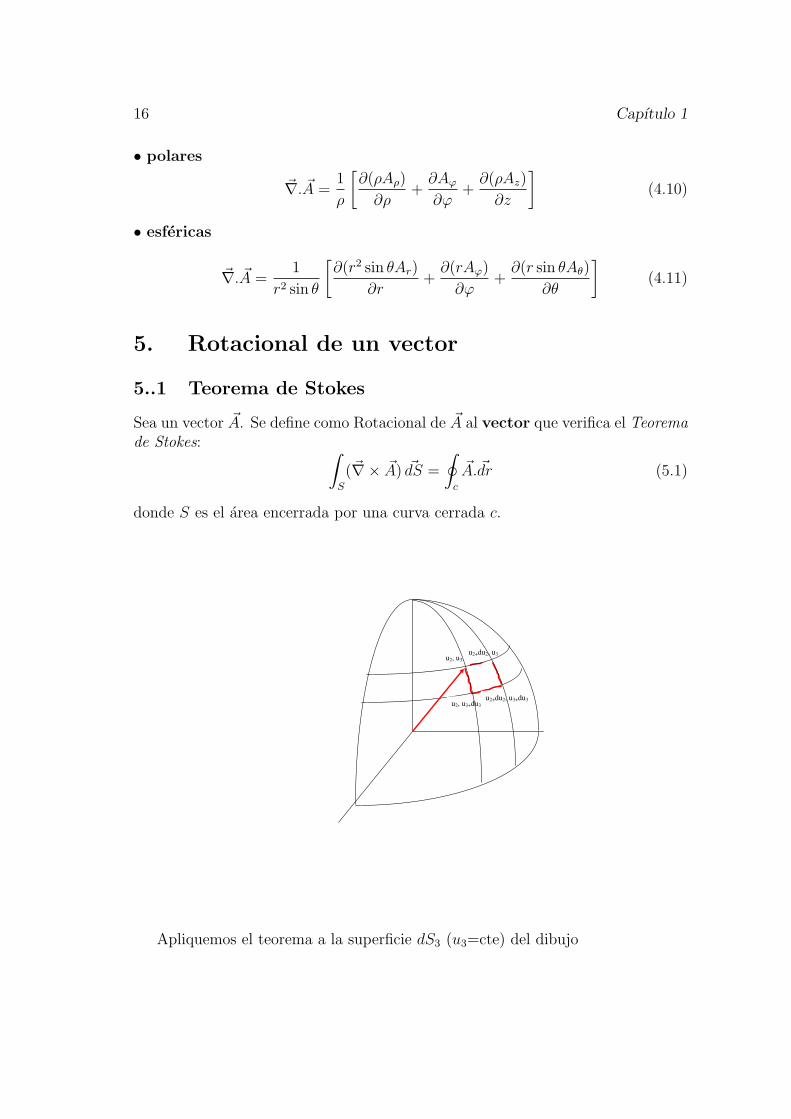
5..1 Teorema de Stokes
Sea un vector ~A. Se define como Rotacional de ~A al vector que verifica el Teoremade Stokes: ∫
S
(~∇× ~A) ~dS =
∮
c
~A. ~dr (5.1)
donde S es el area encerrada por una curva cerrada c.
u2, u3
u2, u3+du3
u2+du2, u3+du3
u2+du2, u3
Apliquemos el teorema a la superficie dS3 (u3=cte) del dibujo

Preliminares Matematicos 17
5..2 Integrales de lınea
(~∇× ~A)3dS3 = (A1dl1)u2 + (A2dl2)u1+du1 − (A1dl1)u2+du2 − (A2dl2)u1 (5.2)
o bien:
(~∇× ~A)3 h1h2du1du2 = (A1h1du1)u2 + (A2h2du2)u1+du1
−(A1h1du1)u2+du2 − (A2h2du2)u1 (5.3)
Teniendo en cuenta que:
∂(A1h1)
∂u2
=(A1h1)u2+du2 − (A1h1)u2
du2
∂(A2h2)
∂u1
=(A2h2)u1+du1 − (A2h2)u1
du1
(5.4)
obtenemos:
(~∇× ~A)3 =1
h1h2
[∂
∂u1
(A2h2)− ∂
∂u2
(A1h1)
](5.5)
El mismo proceso se puede aplicar a las superficies dS1 y dS2. El resultado es:
(~∇× ~A)i =1
hjhk
εijk ∂(Akhk)
∂uj
(5.6)
que, escrito en los diferentes sistemas de coordenadas es:
• cartesianas
~∇× ~A =
(∂Az
∂y− ∂Ay
∂z
)~i
+
(∂Ax
∂z− ∂Az
∂x
)~j
+
(∂Ay
∂x− ∂Ax
∂y
)~k (5.7)
• polares
~∇× ~A =1
ρ
(∂Az
∂ϕ− ∂(ρAϕ)
∂z
)~jρ
+
(∂Aρ
∂z− ∂Az
∂ρ
)~jϕ
+1
ρ
(∂(ρAϕ)
∂ρ− ∂Aρ
∂ϕ
)~k (5.8)

18 Capıtulo 1
• esfericas
~∇× ~A =1
rsenθ
(∂Aθ
∂ϕ− ∂(Aϕsenθ)
∂θ
)~jr (5.9)
+1
r
(∂Ar
∂θ− ∂(rAθ)
∂r
)~jϕ
+1
rsenθ
(∂(rsenθAϕ)
∂r− ∂Ar
∂ϕ
)~jθ (5.10)
6. Laplaciana de un escalar
Sea un escalar B, se define como laplaciana de B al escalar 4B que verifica
4B = ~∇.( ~∇B) (6.1)
Segun esta definicion, combinando los resultados anteriores para la divergencia yel gradiente
4B =1
h1h2h3
[∂
∂u1
(h2h3
h1
∂B
∂u1
)+
∂
∂u2
(h1h3
h2
∂B
∂u2
)+
∂
∂u3
(h1h2
h3
∂B
∂u3
)](6.2)
es decir:
• cartesianas
4B =∂2B
∂x2+
∂2B
∂y2+
∂2B
∂z2(6.3)
• polares
4B =1
ρ
∂
∂ρ
(ρ∂B
∂ρ
)+
1
ρ2
∂2B
∂ϕ2+
∂2B
∂z2(6.4)
• esfericas
4B =1
r2
∂
∂r
(r2∂B
∂r
)+
1
r2senθ
∂
∂θ
(senθ
∂B
∂θ
)+
1
r2sen2θ
∂2B
∂ϕ2(6.5)

Preliminares Matematicos 19
7. Problemas
Enunciados
1) Hallar la relacion entre los vectores unitarios en coordenadas polares y carte-sianas. Calcular la variacion de los vectores unitarios en coordenadas polares.
2) Hallar la relacion entre los vectores unitarios en coordenadas esfericas y carte-sianas. Calcular la variacion de los vectores unitarios en coordenadas esfericas.
3) Hallar d~r en los tres sistemas de coordenadas.
4) Hallar la posicion, velocidad y aceleracion en los tres sistemas de coordenadas.
5) Sea el escalar a = x + y2 + z2. Calcular la circulacion de su gradiente cuandose pasa del extremo inferior del diametro vertical de una circunferencia contenidaen una esfera de radio r = 3 con centro en M = (2, 2, 1) al superior, siguiendo lacircunferencia que se encuentra en el plano formado por su centro y el eje Z.
6) Comprobar el teorema de Gauss para el vector ~a = (2x2,−4y2, z), en la regionlimitada por la superficie x2 + y2 = 4 y los planos z = ±2.
7) Comprobar el teorema de Stokes para el vector ~a = (x − 2y, y2z3, y3z2), en elcontorno dado por x2 + y2 = 1, z = 0 y en el hemisferio superior de la superficieesferica que tiene por borde dicha circunferencia.
8) Demostrar que para un vector ~A, se satisface que ∇ · (∇× ~A) = 0. Demostrartambien que para un escalar φ se cumple que ∇× (∇φ) = 0.
9)Escribir en polares la ecuacion de una elipse centrada en un foco

20 Capıtulo 1
1) Hallar la relacion entre los vectores unitarios en coordenadas polares y carte-sianas. Calcular la variacion de los vectores unitarios en coordenadas polares.
Solucion
~jρ se encuentra en el plano XY formando un angulo ϕ con el eje X. Tenemosentonces
~jρ = cos ϕ~i + sen ϕ~j
~jϕ se encuentra tambien en el plano XY formando un angulo (ϕ + π2) con el eje X
y por tanto~jϕ = − sen ϕ~i + cos ϕ~j
~jz se encuentra dirigido segun el eje Z,
~jz = ~k
La variacion de los vectores unitarios en coordenadas polares se determinara derivandolas expresiones anteriores y teniendo en cuenta que los vectores unitarios en coor-denadas carterianas permanecen constantes. Por lo tanto:
d~jρ = (− sen ϕ~i + cos ϕ~j) dϕ = ~jϕdϕ
d~jϕ = −(cos ϕ~i + sen ϕ~j) dϕ = −~jρdϕ
d~jz = 0

Preliminares Matematicos 21
2) Hallar la relacion entre los vectores unitarios en coordenadas esfericas y carte-sianas. Calcular la variacion de los vectores unitarios en coordenadas esfericas.
Solucion
El vector unitario ~jϕ esta contenido en el plano XY formando un angulo (ϕ + π2)
con el eje X,~jϕ = − sen ϕ~i + cos ϕ~j
El vector unitario ~jr puede descomponerse en componentes segun el eje Z y en elplano XY , esta ultima formando un angulo ϕ con el eje X. Por lo tanto puedeescribirse:
~jr = cos θ ~k + sen θ(cos ϕ~i + sen ϕ~j)
El vector ~jθ se descompone en su parte segun el eje Z (con el que forma un angulo(θ + π
2)) y su parte en el plano XY (que forma un angulo ϕ con el eje X),
~jθ = − sen θ ~k + cos θ(cos ϕ~i + sen ϕ~j)
Para calcular la variacion de los vectores unitarios en coordenadas esfericas, bastaderivar las expresiones anteriores y tener en cuenta que los vectores unitarios encoordenadas cartersianas permanecen constantes. El resultado es:
d~jϕ = −(sen θ~jr + cos θ~jθ) dϕ
d~jr = dθ~jθ + sen θdϕ~jϕ
d~jθ = −dθ~jr + cos θdϕ~jϕ

22 Capıtulo 1
3) Hallar d~r en los tres sistemas de coordenadas.
Solucion
• Coordenadas cartesianas~r = x~i + y~j + z~k
d~r = dx~i + dy~j + dz~k
• Coordenadas polares
~r = ρ~jρ + z~jz
d~r = dρ~jρ + ρd~jρ + dz~jz = dρ~jρ + ρdϕ~jϕ + dz~jz
• Coordenadas esfericas~r = r~jr
d~r = dr~jr + rd~jr = dr~jr + r sen θdϕ~jϕ + rdθ~jθ

Preliminares Matematicos 23
4) Hallar la posicion, velocidad y aceleracion en los tres sistemas de coordenadas.
Solucion
• Coordenadas cartesianas~r = x~i + y~j + z~k
~v =d~r
dt= ~r = x~i + y~j + z~k
~a =d~v
dt= ~r = x~i + y~j + z~k
• Coordenadas polares~r = ρ~jρ + z~jz
~v = ρ~jρ + ρϕ~jϕ + z~jk
~a = (ρ− ρϕ2)~jρ + (2ρϕ + ρϕ)~jϕ + z~jk
• Coordenadas esfericas~r = r~jr
~v = r~jr + r(θ~jθ + sen θϕ~jϕ)
~a = (r − rθ2 − r sen2 θϕ2)~jr + (2rϕ sen θ + 2θϕr cos θ + r sen θϕ)~jϕ
+ (2rθ + rθ − r cos θ sen θϕ2)~jθ

24 Capıtulo 1
5) Sea el escalar a = x + y2 + z2. Calcular la circulacion de su gradiente cuandose pasa del extremo inferior del diametro vertical de una circunferencia contenidaen una esfera de radio r = 3 con centro en M = (2, 2, 1) al superior, siguiendo lacircunferencia que se encuentra en el plano formado por su centro y el eje Z.
Solucion
–20
24
6–2 0 2 4 6
–2
0
2
4
Teniendo en cuenta el centro M de la circunferencia, los puntos A y B en coorde-nadas se escribiran A = (2, 2, 4) y B = (2, 2,−2). Para calcular la circulacion delgradiente de a tendremos en cuenta que este se define como
da = ~∇a. ~dr
La circulacion del gradiente de a = x + y2 + z2 sera entonces
∮~∇a. ~dr =
∫ A
B
da = a(A)− a(B) = 22− 10 = 12
Se concluye que el resultado solo depende de los puntos inicial y final y no delcamino seguido desde A hasta B.

Preliminares Matematicos 25
6) Comprobar el teorema de Gauss para el vector ~a = (2x2,−4y2, z), en la regionlimitada por la superficie x2 + y2 = 4 y los planos z = ±2.
Solucion
Sea un vector ~a. Se define como divergencia de ~a al escalar que verifica el Teoremade Gauss,
ρ
∫
V
~∇.~a dV =
∫
S
~a.d~S
siendo V el volumen de la region considerada y S su superficie.Calcularemos por separado ambas integrales. Por la simetrıa del problema es
conveniente utilizar coordenadas polares. Sean Sρ, S+z y S−z las superficies que
rodean la region cosiderada. La integral de superficie sera por tanto∫
S
~a. ~ds =
∫
Sρ
aρdSρ +
∫
S+z
azdSz −∫
S−zazdSz
donde aρ az son las componentes del vector ~a en las direcciones perpendiculares ala superficie, es decir:
~a = 2x2~i− 4y2~j + z~k = aρ~jρ + aϕ
~jϕ + az~k

26 Capıtulo 1
Haciendo uso de las relaciones entre los vectores unitarios en coordenadas carte-sianas y polares se tiene que
aρ = 2ρ2(cos3 ϕ− 2 sen3 ϕ)
aϕ = −2ρ2 cos ϕ sen ϕ(cos ϕ + 2 sen ϕ)
az = z
La integral de superficie puede escribirse entonces como
∫
S
~a. ~ds =
[∫ 2π
0
∫ 2
−2
2ρ3(cos3 ϕ− 2 sen3 ϕ)dϕdz
]
ρ=2
+
+
[∫ 2π
0
∫ 2
0
zρdρdϕ
]
z=2
−[∫ 2π
0
∫ 2
0
zρdρdϕ
]
z=−2
= 16π
donde hemos utilizado que
∫ 2π
0
(cos3 ϕ− 2 sen3 ϕ)dϕ =[sen x
3
cos2 x + 2
+
cos x
3
2 sen2 x + 4
]2π
0= 0
Calculemos ahora la integral de volumen. El gradiente del vector ~a es
~∇.~a = 4x− 8y + 1
y por lo tanto tenemos que
∫
V
(~∇.~a) dV =
∫ 2π
0
∫ 2
0
∫ 2
−2
(4ρ cos ϕ− 8ρ sen ϕ + 1) ρdρdϕdz = 16π

Preliminares Matematicos 27
7) Comprobar el teorema de Stokes para el vector ~a = (x − 2y, y2z3, y3z2), en elcontorno dado por x2 + y2 = 1, z = 0 y en el hemisferio superior de la superficieesferica que tiene por borde dicha circunferencia.
Solucion
Sea el vector ~a. Se define como rotacional de ~a al vector que verifica el Teoremade Stokes
∫
S
(~∇× ~a) ~ds =
∮
C
~a.~dr
siendo S el area encerrada por la curva cerrada C.Para el vector
~a = (x− 2y)~i + y2z3~j + y3z2~k
su rotacional es:
~∇× ~a = 2~k
En esfericas
• Sobre la superficie esferica
r = 1, 0 < ϕ < 2π, 0 < θ <π
2

28 Capıtulo 1
El elemento de superficie es a r = cte = 1. Por tanto
~dSr = r2 sin θdθdϕ~jr = sin θdθdϕ~jr
Mientras que~∇× ~a = 2(cos θ~jr − sin θ~jθ)
Por lo tanto
∫
S
(~∇× ~a) ~ds =
∫ π2
θ=0
∫ 2π
ϕ=0
2 cos θ sin θdθdϕ =
(−cos (2θ)
2
)π2
θ=0
(ϕ)2πϕ=0 = 2π
• Sobre la circunferencia
r = 1, , 0 < ϕ < 2π, θ =pi
2
x = cosϕ, y = sin ϕ, z = 0
~i = cos ϕ~jr − sin ϕ~jϕ, ~j = sin ϕ~jr + cos ϕ~jϕ, ~k = −~jtheta
En consecuencia~dr = dr~jr + r sin θdϕ~jϕ + rdθ~jθ = dϕ~jϕ
mientras que~a = (cos ϕ− 2 sin ϕ)(cos ϕ~jr − sin ϕ~jϕ)
Por lo tanto ∫~a. ~dr =
∫ 2π
ϕ=0
(cos ϕ− 2 sin ϕ)(− sin ϕdϕ
∫~a. ~dr =
∫ 2π
ϕ=0
(−sin 2ϕ
2+ 1− cos ϕ
)dϕ = 2π
En polares
En estas coordenadas el vector ~a se escribe
~a = (x− 2y)~i + y2z3~j + y3z2~k =
= (ρ cos2 ϕ− 2ρ sen ϕ cos ϕ + ρ2z3 sen3 ϕ)~jρ
+ (2ρ sen2 ϕ− ρ cos ϕ sen ϕ + ρ2z3 sen2 ϕ cos ϕ)~jϕ
+ ρ3 sen3 ϕz2~k
Calculemos en primer lugar la integral de superficie.
∫
S
(~∇× ~a) ~ds =
∫
S
(~∇× ~a)z~dsz = 2
∫ 2π
0
∫ 1
0
ρdρdϕ = 2π

Preliminares Matematicos 29
donde hemos utilizado
(~∇× ~a)z =
(∂ay
∂x− ∂ax
∂y
)= 2.
Calculemos ahora la integral de linea.
∮~a. ~dr =
∫aϕρdϕ
=
∫ 2π
0
(2ρ sen2 ϕ− ρ cos ϕ sen ϕ + ρ2z3 sen2 ϕ cos ϕ) ρdϕ
La integral se lleva a cabo en la linea dada por las ecuaciones z = 0 y ρ = 1 y portanto ∮
~a. ~dr =
∫ 2π
0
(2 sen2 ϕ− cos ϕ sen ϕ)dϕ = 2π

30 Capıtulo 1
8) Demostrar que para un vector ~A, se satisface que ∇ · (∇× ~A) = 0. Demostrartambien que para un escalar φ se cumple que ∇× (∇φ) = 0.
Solucion
Por simplicidad elegimos coordenadas cartesianas.
~∇.(~∇× ~A) =∂
∂x
(∂Az
∂y− ∂Ay
∂z
)+
∂
∂y
(∂Ax
∂z− ∂Az
∂x
)
+∂
∂z
(∂Ay
∂x− ∂Ax
∂y
)= 0
~∇× ( ~∇φ) =
∣∣∣∣∣∣∣∣∣∣∣
~i ~j ~k
∂∂x
∂∂y
∂∂z
∂φ∂x
∂φ∂y
∂φ∂z
∣∣∣∣∣∣∣∣∣∣∣
= 0

Preliminares Matematicos 31
9)Escribir en polares la ecuacion de una elipse centrada en un foco
Solucion
La ecuacion de la elipse en cartesianas es
(x− c)2
a2+
y2
b2= 1
dondec2 = a2 − b2
o bienc = aε
con
ε =
√1− b2
a2
En tal caso se verifican las sigientes relaciones
r1 = a− c = a(1− ε)
r2 = a + c = a(1 + ε)
a =r2 + r1
2
b2 = r1r2
c =r2 − r1
2

32 Capıtulo 1
Pasando la ecuacion de la elipse a polares
b2(ρ cos ϕ− c)2 + a2ρ2(1− cos2 ϕ) = a2b2
ρ2 cos2 ϕ(b2 − a2)− 2b2cρ cos ϕ + b2c2 − b2a2 + a2ρ2 = 0
c2ρ2 cos2 ϕ + 2b2cρ cos ϕ + b4 − a2ρ2 = 0
Es una ecuacion de segundo grado cuya solucion es:
ρ cos ϕ =±aρ− b2
c
Si tomamos el sino + (el signo − corresponderıa al otro foco)
ρ(a
c− cos ϕ) =
b2
c
o bien escribiendolo en terminos de r1 y r2
ρ =r2(1− ε)
1− ε cos ϕ
Para ϕ = 0, r = r2, perihelioPara ϕ = π, r = r1, afelio

Capıtulo 2 .
Cinematica de una partıcula
1. Sobre la nocion de partıcula
En este curso nos referiremos principalmente a partıculas puntuales, llamadastambien puntos materiales, masas puntuales o simplemente partıculas. Se trata deuna idealizacion aplicable cuando lo unico que interesa es conocer la posicion de unpunto del cuerpo porque se puede prescindir de su extension. Es decir, cuando lasdimensiones del cuerpo sean despreciables frente al problema que tratamos. Porejemplo: en el estudio del movimiento de la tierra alrededor del sol esta se puedeconsiderar puntual dado que su radio es de unos 6000 Km frente a la distancia alsol que son 150.000.000 Km.
1..1 Posicion
Para introducir el concepto de movimiento de una partıcula necesitamos un sis-tema de referencia, es decir: un origen de coordenadas, un origen de tiempos, unsistema de coordenadas y un reloj. En tal sistema de referencia la posicion deuna partıcula vendra descrita por su vector posicion. Se dice que una partıcula seencuentra en movimiento en un sistema de referencia cuando su posicion respectodel origen esta cambiando con el tiempo.
1..2 Orbita y trayectoria
Con el transcurso del tiempo, la partıcula describira una curva en el espacio. Dichacurva consistira en una determinada relacion entre las coordenadas de la partıcula.Si damos simplemente la relacion entre las coordenadas con independencia deltiempo, estamos dando la orbita de la partıcula.
Si por el contrario describimos como evolucionan las coordenadas con el tiempo,nos estamos refiriendo a la trayectoria. Por ejemplo, si la curva descrita es una
33

34 Capıtulo 2
elipse en el plano, la orbita en cartesianas sera
x2
a2+
y2
b2= 1 (1.1)
mientras que la trayectoria en el caso, por ejemplo, de que se mueva con velocidadangular constante es
x = a cos ω0t
y = b sin ω0t (1.2)
Como se ve la trayectoria ofrece la posibilidad de saber la posicion de lapartıcula en cada instante de tiempo.
1..3 Velocidad
Sea una partıcula con vector de posicion ~r. Su velocidad es la derivada de ~r conrespecto al tiempo, es decir
~v =~dr
dt≡ ~r = lim δt→0
~r(t + δt)− ~r(t)
δt(1.3)
Este vector se puede calcular en los diferentes sistemas de coordenadas
•cartesianas
vx = x
vy = y
vz = z (1.4)
•polares
vρ = ρ
vϕ = ρϕ
vz = z (1.5)
•esfericas
vr = r
vϕ = r sin θϕ
vθ = rθ (1.6)

Cinematica de una partıcula 35
1..4 Aceleracion
Se llama aceleracion ~a(t) a la segunda derivada del vector posicion respecto deltiempo
~a(t) = ~r(t) = ~v(t) (1.7)
Su expresion en los distintos sistemas coordenados es:•cartesianas
ax = x
ay = y
az = z (1.8)
•polaresaρ = ρ− ρϕ2
aϕ = ρϕ + 2ρϕ
az = z (1.9)
•esfericasar = r − rθ2 − r sin2 θϕ2
aϕ = r sin θϕ + 2rϕ sin θ + 2rθϕ cos θ
aθ = rθ − r sin θ cos θϕ2 + 2rθ (1.10)
Mas adelante hablaremos de las componentes intrınsecas de la aceleracion
2. Estudio de curvas en el espacio
2..1 Representacion analıtica de una curva
Hay varias formas de describir una curva en el espacio:
a) Representacion parametrica
x = x(u)
y = y(u)
z = z(u) (2.1)
donde u es el parametro
b) Si dxdu6= 0 se puede utilizar como parametro la propia coordenada x
y = y(x)
z = z(x) (2.2)

36 Capıtulo 2
c) Interseccion de dos superficies
F1(x, y, z) = 0
F2(x, y, z) = 0 (2.3)
Aqui utilizaremos preferentemente la forma parametrica.
2..2 Longitud de un arco de curva. Representacion intrınseca
Dado un punto de coordenadas (x, y, z) el elemento de arco descrito cuando pasamosa otro punto (x + dx, y + dy, z + dz) a lo largo de una curva dada sera
ds2 = dx2 + dy2 + dz2 (2.4)
que en parametricas sera:
ds =√
x2 + y2 + z2 du (2.5)
donde el punto significa derivada con respecto al parametro u. La integracion de laexpresion (2.5) nos permite expresar la longitud de arco s en funcion del parametrou y por tanto utilizar el propio arco s como parametro. Hablaremos en tal caso derepresentacion intrınseca de la curva cuando la parametricemos en la forma~r = ~r(s), es decir:
x = x(s)
y = y(s)
z = z(s) (2.6)
2..3 Vector tangente
Dada una curva intrınseca ~r = ~r(s), se define el vector tangente a la curva como:
~t =d~r
ds(2.7)
Es facil comprobar que se trata de un vector unitario. En efecto:
~t.~t =d~r
ds.d~r
ds=
(d~r
du
du
ds
).
(d~r
du
du
ds
)=
d~r
du.d~r
du
(du
ds
)2
= (x2 + y2 + x2)
(du
ds
)2
= 1 (2.8)

Cinematica de una partıcula 37
2..4 Vector normal: Curvatura y cırculo osculador
El vector normal se define como:
~n =1
k
d~t
ds(2.9)
donde k es la curvatura definida como
k =| d~t
ds| (2.10)
de forma que ~n es obviamente unitario por construccion. Si derivamos con respectoa s la expresion
~t.~t = 1 (2.11)
obtenemos~t.~n = 0 (2.12)
de forma que ~t y ~n son ortonormales.Se define como cırculo osculador en un punto ~r0 de una curva al cırculo,
situado en el plano formado por ~t y ~n, de radio 1k
y centrado en ~r0 + ~nk.
2..5 Vector binormal: Torsion
Puesto que ~t y ~n son unitarios y perpendiculares podemos definir un vector unitarioy perpendicular a ambos en la forma:
~b = ~t× ~n (2.13)
Por otra parte si hacemos el calculo de la siguiente expresion
~n× d~b
ds= ~n×
(~t× d~n
ds
)= ~t
(~n.
d~n
ds
)− d~n
ds(~n.~t) =
= ~t
[1
2
d
ds(~n.~n)
]= 0 (2.14)
lo que significa que d~bds
esta en la direccion de ~n y por tanto
d~b
ds= −τ~n (2.15)
El coeficiente de proporcionalidad τ , es decir,
τ = −~n.d~b
ds(2.16)
se denomina torsion de la curva.

38 Capıtulo 2
3. Triedro intrınseco de una curva en el espacio
Puesto que los vectores ~t, ~n y ~b son unitarios y perpendiculares, en cada punto ~r0
de una curva constituyen una base ortonormal intrınseca a la curva.
Los tres planos definidos por estos tres vectores constituyen un triedro de planosperpendiculares que se denomina triedro intrınseco a la curva en el punto ~r0.Estos planos son:
• Plano osculador Es el definido por ~t0 y ~n0 y por tanto perpendicular a ~b0, esdecir el formado por los puntos ~r tales que
(~r − ~r0).~b0 = 0 (3.1)
• Plano normal Es el perpendicular a ~t0, es decir el formado por los puntos ~r
tales que(~r − ~r0).~t0 = 0 (3.2)
• Plano rectificante Es el perpendicular a ~n0, es decir el formado por los puntos
~r tales que(~r − ~r0).~n0 = 0 (3.3)
3..1 Formulas de Frenet
Con las definiciones anteriores es facil comprobar que se verifican las siguientesecuaciones, denominadas Formulas de Frenet.
d~t
ds= k~n
d~n
ds= τ~b− k~t
d~b
ds= −τ~n (3.4)

Cinematica de una partıcula 39
d
ds
~t~n~b
=
0 k 0−k 0 τ0 −τ 0
~t~n~b
.
4. Componentes intrınsecas de la aceleracion
Si pasamos ahora al parametro fısico que es el tiempo, tendremos
s = s(t) (4.1)
de forma que
~v =d~r
ds
ds
dt= v~t (4.2)
dondev = s (4.3)
ya que ~t es unitario. Por tanto el vector velocidad es siempre paralelo al vectortangente.
Si derivamos ahora (4.2) respecto al tiempo tenemos:
~a = v~t + vd~t
ds
ds
dt= v~t + v2k~n (4.4)
que es la representacion intrınseca de la aceleracion. Como vemos esta en el planoosculador. Sus proyecciones en las direcciones de ~t y ~n reciben el nombre de:
• aceleracion tangencialat = v (4.5)
• aceleracion normalan = kv2 (4.6)

40 Capıtulo 2
5. Problemas
Enunciados
1) Una partıcula se mueve sometida a la aceleracion
~a = 2e−t~i + 5 cos t~j − 3 sen t~k
En el instante t = 0 la partıcula esta situada en el punto~i− 3~j +2~k con velocidad~v0 = 4~i− 3~j + 2~k. Calcular la velocidad y la posicion de la partıcula en cualquierinstante.
2) Encontrar la velocidad, aceleracion y componentes intrınsecas de esta para unapartıcula que se mueve en la elipse.
x = acosωt, y = b sin ωt
3) Calcular el elemento de arco, los vectores normal, tangente y binormal y eltriedro intrınseco para la curva
x = R cos2 t, y = R cos t sin t, z = R sin t
4) Hallar la longitud de arco de las siguientes curvas en los intervalos indicados:a) x = et cos t; y = et sen t; z = et, desde t = 0 hasta t = 2.
b) y = a arcsin xa; z = a
4ln a+x
a−x, desde (0, 0, 0) hasta (x0, y0, z0).
c) x2 = 3y; 2xy = 9z, desde (0, 0, 0) hasta (3, 3, 2).
5) Una partıcula de masa m y carga q se encuentra bajo la accion de un campo
magnetico ~B = (mc/q)ω0~k. Encontrar y analizar la curva que describe la partıcula
en los siguientes casos:a) Parte del origen con velocidad inicial ~v0 = (0, v0, 0).b) Parte del origen con velocidad inicial ~v0 = (0, 0, v0).c) Parte del punto ~r0 = (x0, 0, 0) con velocidad inicial ~v0 = ω0x0(0, 1, 1).
6) Determinar para el caso c) del problema anterior la longitud de arco, los vectorestangente y normal, y el triedro intrınseco para t = 0, t = π
4ω0y t = π
2ω0.

Cinematica de una partıcula 41
7) Estudiar la curva que describe una partıcula situada a t = 0 en el origencon velocidad inicial ~v0 = v0
~j, si se encuentra bajo la accion de una fuerza~F = m (6αt~i +
√6αv0
~k). Determinar asimismo la longitud de arco, los vectorestangente y normal, y el triedro intrınseco para t = 0.
8) Un bote parte desde un punto P de una orilla de un rıo y viaja con velocidadconstante (en modulo) v en direccion hacia el punto Q que se encuentra enfrenteen la otra orilla, siendo D la anchura del rıo. Si r es la distancia instantanea de Qal bote, θ el angulo entre r y PQ, y la corriente del rıo tine a velocidad c, probarque el camino del bote viene dado por la expresion
r =D sec θ
(sec θ + tg θ)v/c
Probar tambien que cuando c = v el camino es un arco de parabola.
9) Un punto describe una circunferencia de radio R en el sentido contrario a lasagujas del reloj, de forma que la componente de su aceleracion sobre un diametrofijo, que se tomara como el eje de las X, es nula. Sabiendo que en el instante inicialla componente del vector velocidad paralela al citado diametro vale v0, hallar, enfuncion de θ y del tiempo:
a) Los vectores posicion, velocidad y aceleracion de la partıcula.b) Las componentes intrınsecas del vector aceleracion.
10) Un punto P de una circunferencia de radio R rueda sin resbalar sobre el ejeX con velocidad angular ω. Encontrar las ecuaciones parametricas que describenel movimiento de dicho punto. Determinar asimismo la curvatura, la velocidad yla aceleracion, y las componentes intrınsecas de esta. ¿ Cuales son las velocidadesmamima y mınima y a que punto de la curva corresponden?

42 Capıtulo 2
1) Una partıcula se mueve sometida a la aceleracion
~a = 2e−t~i + 5 cos t~j − 3 sen t~k
En el instante t = 0 la partıcula esta situada en el punto ~r0 = ~i − 3~j + 2~k convelocidad ~v0 = 4~i− 3~j + 2~k. Calcular la velocidad y la posicion de la partıcula encualquier instante.
Solucion
Teniendo en cuenta que la aceleracion es ~a = d~vdt
integramos para obtener la ex-presion del vector velocidad
~v =
∫~adt = (−2e−t~i + 5 sin t~j + 3 cos t~k) + ~A
siendo ~A un vector constante de integracion que calcularemos con la condicioninicial ~v(t = 0) = ~v0.
−2~i + 3~k + ~A = 4~i− 3~j + 2~k
Se tiene por tanto que ~A = 6~i− 3~j − ~k
y la expresion para el vector velocidad es
~v = (−2e−t + 6)~i + (5 sin t− 3)~j + (3 cos t− 1)~k
Procediendo de la misma forma, el vector de posicion se calculara a partir delvector velocidad como
~r =
∫~vdt = (2e−t + 6t)~i + (−5 cos t− 3t)~j + (3 sin t− t)~k + ~B
La condicion inicial ~r(t = 0) = ~r0 para la posicion de la partıcula permite ahoracalcular
2~i− 5~j + ~B =~i− 3~j + 2~k
~B = −~i + 2~j + 2~k
y por tanto
~r = (2e−t + 6t− 1)~i + (−5 cos t− 3t + 2)~j + (3 sin t− t + 2)~k

Cinematica de una partıcula 43
020406080–12
–8–4
0
–40
–30
–20
–10

44 Capıtulo 2
2) Encontrar la velocidad, aceleracion y componentes intrınsecas de esta para unapartıcula que se mueve en la elipse.
x = acosωt, y = b sin ωt
Solucion
El vector de posicion para una partıcula que se mueve en una elipse de semiejes ay b viene dado por la expresion
~r = a cos ωt~i + b sin ωt~j
La velocidad sera entonces
~v = ~r = ω(−a sin ωt~i + b cos ωt~j)
cuyo modulo es
v = ω√
a2 sin2 ωt + b2 cos2 ωt
La aceleracion queda de la forma
~a = ~r = −ω2~r
y su modulo
a = ω2√
a2 cos2 ωt + b2 sin2 ωt
–3
–2
–1
0
1
2
3
–1 –0.5 0.5 1

Cinematica de una partıcula 45
La componente tangencial de la aceleracion esta dirigida en la direccion de ~v ysu modulo es
at =~v.~a
v=
ω2(a2 − b2) sin ωt cos ωt√a2 sin2 ωt + b2 cos2 ωt
Por lo tanto la aceleracion tangencial sera
~at = at~v
v=
ω2(a2 − b2) sin ωt cos ωt
a2 sin2 ωt + b2 cos2 ωt(−a sin ωt~i + b cos ωt~j)
Teniendo en cuenta que ~an = ~a − ~at tenemos que la componente normal de laaceleracion es
~an = −abω2 b cos ωt~i + a sin ωt~j
a2 sin2 ωt + b2 cos2 ωt
y su modulo
an =abω2
√a2 sin2 ωt + b2 cos2 ωt
Es facil comprobar que se verifica a2 = a2t + a2
n.
46 Capıtulo 2
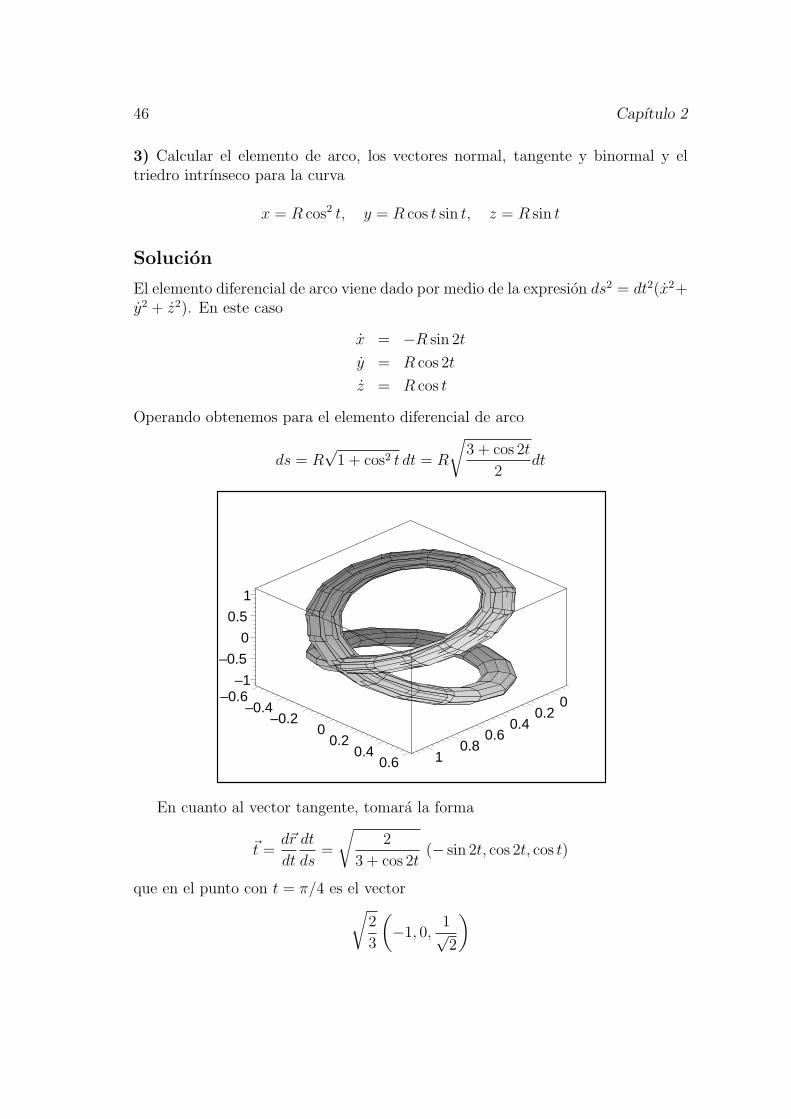
3) Calcular el elemento de arco, los vectores normal, tangente y binormal y eltriedro intrınseco para la curva
x = R cos2 t, y = R cos t sin t, z = R sin t
Solucion
El elemento diferencial de arco viene dado por medio de la expresion ds2 = dt2(x2+y2 + z2). En este caso
x = −R sin 2t
y = R cos 2t
z = R cos t
Operando obtenemos para el elemento diferencial de arco
ds = R√
1 + cos2 t dt = R
√3 + cos 2t
2dt
00.2
0.40.6
0.81
–0.6–0.4
–0.20
0.20.4
0.6
–1
–0.5
0
0.5
1
En cuanto al vector tangente, tomara la forma
~t =d~r
dt
dt
ds=
√2
3 + cos 2t(− sin 2t, cos 2t, cos t)
que en el punto con t = π/4 es el vector√
2
3
(−1, 0,
1√2
)

Cinematica de una partıcula 47
Para calcular el vector normal es preciso determinar primero el vector ~K,
~K =d~t
dt
dt
ds=
2
R(3 + cos 2t)2×
(− cos 2t(6 + cos 2t)− 1,− sin 2t(6 + cos 2t), cos t sin 2t− sin t(3 + cos 2t))
La curvatura sera simplemente el modulo de ~K y el vector normal vendra dadopor ~n = 1
kd~tds
, que en el punto considerado es el vector
~n =1
2√
10(0,−6,−
√2)
El vector binormal es el vector perpendicular a ~t y ~n que en t = π/4 es
~b(π/4) = ~t(π/4)× ~n(π/4) =1
2√
15(3√
2,−√
2, 6)
Por ultimo el triedro intrınseco en t = π/4 esta constituido por los planos normal,rectificante y osculador; es trivial comprobar que en este punto tienen, respectiva-mente, las ecuaciones
√2x− z = 0,
6y +√
2z − 4 = 0,
3√
2x−√
2y + 6z − 4√
2 = 0

48 Capıtulo 2
4) Hallar la longitud de arco de las siguientes curvas en los intervalos indicados:a) x = et cos t; y = et sen t; z = et, desde t = 0 hasta t = 2.
b) y = a arcsin xa; z = a
4ln a+x
a−x, desde (0, 0, 0) hasta (x0, y0, z0).
c) x2 = 3y; 2xy = 9z, desde (0, 0, 0) hasta (3, 3, 2).
Solucion
El elemento diferencial de arco ds se determina a partir de la expresion
ds2 = dx2 + dy2 + dz2
a) x = et cos t; y = et sen t; z = et,En este caso tenemos la curva en forma parametrica y por lo tanto
ds2 = dt2(x2 + y2 + z2)
donde el punto indica derivadas con respecto al parametro t. Es facil comprobarque
ds =√
3etdt
que una vez integrada proporciona la longitud de arco, que en el intervalo consid-erado sera
ds =√
3
∫ 2
0
et dt =√
3(e2 − 1)
b) y = a arcsin xa; z = a
4ln a+x
a−x,
En este caso el elemento diferencial de arco vendra dado por
ds2 = dx2
(1 +
(dy
dx
)2
+
(dz
dx
)2)
donde a partir de las expresiones para y y z se tiene
dy
dx=
a√a2 − x2
,dz
dx=
a2
2(a2 − x2)
Operando obtenemos
s =1
2
∫ x0
0
3a2 − 2x2
a2 − x2dx = x0 + z0
c) x2 = 3y; 2xy = 9z,Para este caso podemos expresar y y z en funcion de x
y =x2
3, z =
2
27x3

Cinematica de una partıcula 49
La longitud de arco en el intervalo indicado sera simplemente
s =
∫ 3
0
(2
9x2 + 1
)dx = 5
02
46
810 5 10 15 20 25 30
010203040506070

50 Capıtulo 2
5) Una partıcula de masa m y carga q se encuentra bajo la accion de un campo
magnetico ~B = (mc/q)ω0~k. Encontrar y analizar la curva que describe la partıcula
en los siguientes casos:a) Parte del origen con velocidad inicial ~v0 = (0, v0, 0).b) Parte del origen con velocidad inicial ~v0 = (0, 0, v0).c) Parte del punto ~r0 = (x0, 0, 0) con velocidad inicial ~v0 = ω0x0(0, 1, 1).
Solucion
La ecuacion del movimiento para la partıcula es, teniendo en cuenta la expresionpara el campo magnetico ~B
md~v
dt=
q
c(~v × ~B) = mω0(~v × ~k)
Esta ecuacion vectorial puede escribirse en componentes como
dvx
dt= ω0vy
dvy
dt= −ω0vx
dvz
dt= 0
Integrando las ecuaciones anteriores obtenemos las expresiones para las compo-nentes del vector velocidad
vx = α sin(ω0t + β)
vy = α cos(ω0t + β)
vz = γ
siendo α, β y γ constantes de integracion. Las componentes del vector de posicionse obtendran tras una nueva integracion:
x = a− α
ω0
cos(ω0t + β)
y = b +α
ω0
sin(ω0t + β)
z = c + γt
Tenemos por lo tanto seis constantes de integracion a determinar con las condi-ciones iniciales correspondientes a cada uno de los casos.

Cinematica de una partıcula 51
a) La partıcula parte del origen con velocidad inicial ~v0 = (0, v0, 0). Las constantesde integracion con estas condiciones iniciales son β = 0, α = v0, γ = 0 y a =α/ω0, b = c = 0. Sustituyendo los valores anteriores el resultado es
x =v0
ω0
(1− cos ω0t)
y =v0
ω0
sin ω0t
z = 0
Las ecuaciones anteriores constituyen la trayectoria de la partıcula bajo esas condi-ciones iniciales. Es facil comprobar que, eliminando entre ellas el tiempo, la orbitaque describe la partıcula en este caso es la circunferencia de radio v0/ω0 y concentro en el punto (v0/ω0, 0),
(x− v0
ω0
)2
+ y2 =
(v0
ω0
)2
b) En este caso suponemos que la partıcula parte del origen con velocidad ~v0 =(0, 0, v0). Las constantes de integracion son ahora α = 0, γ = v0 y a = b = c = 0;la sustitucion de estos valores en las ecuaciones nos dan para la trayectoria unalinea recta de ecuacion
z = v0t
c) La partıcula parte del punto ~r0 = (x0, 0, 0) con velocidad ~v0 = (0, ω0x0, ω0x0), encuyo caso los valores para las constantes de integracion son α = x0ω0, β = 0, γ =x0ω0, a = 2x0y b = c = 0.
Las ecuaciones de la trayectoria son
x = 2x0 − x0 cos ω0t
y = x0 sin ω0t
z = x0ω0t
que corresponden a las ecuaciones parametricas de una espiral cilındrica como lade la figura

52 Capıtulo 2
–1–0.5
00.5
1
–3–2
–10
12
3
0
4
8
12

Cinematica de una partıcula 53
6) Determinar para el caso c) del problema anterior la longitud de arco, los vectorestangente y normal, y el triedro intrınseco para t = 0, t = π
4ω0y t = π
2ω0.
Solucion
Consideremos los resultados obtenidos en el apartado c) del problema anterior. Elvector de posicion de la partıcula es
~r = (x0 cos ω0t, x0 sin ω0t, x0ω0t)
y por tanto el elemento diferencial de arco ds sera
ds =√
2x0ω0dt
Se define el vector tangente a una curva como el vector ~t = d~rds
, que para nuestrocaso sera
~t =d~r
ds=
d~r
dt
dt
ds=
1√2(− sin ω0t, cos ω0t, 1)
El vector normal se define como ~n = 1K
d~tds
, donde
~K =d~t
ds=
d~t
dt
dt
ds=
1
2x0
(− cos ω0t,− sin ω0t, 0)
y por tanto~n = (− cos ω0t,− sin ω0t, 0)
siendo la curvatura K = 1/(2x0). El vector binormal sera
~b = ~t× ~n =1√2(sin ω0t,− cos ω0t, 1)
La torsion de una curva viene definida a partir de la derivada con respecto al arcodel vector binormal
τ = −~n.d~b
ds=
1
2x0
Calculemos ya el triedro intrınseco a la curva en cada punto dado por el vectorde posicion ~r0. Se trata de un conjunto de tres planos construidos a partir de losvectores tangente, normal y binormal.El plano osculador, definido por ~t0 y ~n0 y por tanto perpendicular al vector ~b0,dado por la ecuacion
(~r − ~r0).~b0 = 0
El plano normal, definido por ~n0 y ~b0 y por tanto perpendicular al vector ~t0, dadopor la ecuacion
(~r − ~r0).~t0 = 0

54 Capıtulo 2
El plano rectificante, definido por ~t0 y ~b0 y por tanto perpendicular al vector ~n0,dado por la ecuacion
(~r − ~r0).~n0 = 0
Veamos cuales son dichos planos para cada uno de los valores de t del enunciado.
1) t = 0Los vectores de posicion, tangente, normal y binormal son en este caso
~r0 = (x0, 0, 0), ~t0 =1√2(0, 1, 1)
~n0 = (−1, 0, 0), ~b0 =1√2(0,−1, 1)
El triedro intrınseco esta constituido por los planos
z − y = 0, y + z = 0, x = x0
2) t = π4ω0
Los vectores de posicion, tangente, normal y binormal son en este caso
~r0 = x0
(1√2,
1√2,π
4
), ~t0 =
1√2
(− 1√
2,
1√2, 1
)
~n0 =1√2(−1,−1, 0), ~b0 =
1√2
(1√2,− 1√
2, 1
)
El triedro intrınseco esta constituido por los planos
1√2(x− y) + z =
π
4x0, x + y =
√2x0,
1√2(y − x) + z =
π
4x0
3) t = π2ω0
Los vectores de posicion, tangente, normal y binormal son en este caso
~r0 =(0, x0,
π
2x0
), ~t0 =
1√2
(−1, 0, 1)
~n0 = (0,−1, 0), ~b0 =1√2
(1, 0, 1)
El triedro intrınseco esta constituido por los planos
x + z =π
2x0, z − x =
π
2x0, y = x0

Cinematica de una partıcula 55
7) Estudiar la curva que describe una partıcula situada a t = 0 en el origen
con velocidad inicial ~v0 = v0~j, si se encuentra bajo la accion de una fuerza ~F =
m(6αt~i+√
6αv0~k). Determinar asimismo la longitud de arco, los vectores tangente
y normal, y el triedro intrınseco para t = 0.
Solucion
La segunda ley de Newton nos proporciona la ecuacion del movimiento
~F = md2~r
dt= m(6αt~i +
√6αv0
~k)
01000
20003000
0 2 4 6 8 10 12 14
0
50
100
150
200
250
Integrando la ecuacion anterior podemos calcular las componentes del vectorde posicion
x = αt3 + at + x0
y = bt + y0
z = z0 + ct +1
2
√6αv0t
2
donde a, b, c, x0, y0, z0 son constantes de integracion a determinar haciendo uso delas condiciones iniciales. Teniendo en cuenta que la partıcula parte del reposo convelocidad ~v0 = (0, v0, 0), tenemos que estas constantes toman los valores a = c =x0 = y0 = z0 = 0 y b = v0. La trayectoria para la partıcula es
x = αt3
y = v0t
z =1
2
√6αv0t
2

56 Capıtulo 2
Pasemos ya a analizar la curva anterior. En primer lugar calculamos el elementodiferencial de arco que sera de la forma
ds = (3αt2 + v0) dt
Los vectores tangente, normal y binormal quedan
~t =d~r
ds=
1
v0 + 3αt2(3αt2, v0,
√6αv0t
)
d~t
ds=
K =
~n =1
K
d~t
ds=
1
v0 + 3αt2(√
6αv0t,−√
6αv0t, v0 − 3αt2)
~b = ~t× ~n =1
v0 + 3αt2(v0, 3αt2,−√6αv0t
)
y la curvatura y la torsion toman el mismo valor
K = τ =
√6αv0
(v0 + 3αt2)2
Por ultimo, para calcular el triedro intrınseco en t = 0, utilizamos los vectores~r0 = (0, 0, 0), ~t0 = (0, 1, 0), ~n0 = (0, 0, 1), ~b0 = (1, 0, 0). Los planos osculador,normal y rectificante tienen por ecuaciones, respectivamente,
x = 0, y = 0, z = 0

Cinematica de una partıcula 57
8) Un bote parte desde un punto P de una orilla de un rıo y viaja con velocidadconstante (en modulo) v en direccion hacia el punto Q que se encuentra enfrenteen la otra orilla, siendo D la anchura del rıo. Si r es la distancia instantanea de Qal bote, θ el angulo entre r y PQ, y la corriente del rıo tine a velocidad c, probarque el camino del bote viene dado por la expresion
r =D sec θ
(sec θ + tg θ)v/c
Probar tambien que cuando c = v el camino es un arco de parabola.
Solucion
ϕ
La velocidad del bote escrita en el sistema de coordenadas con vectores unitarios~jr y ~jϕ viene dada por
~u = (c cos ϕ− v)~jr − c sin ϕ~jϕ
En estas coordenadas el vector velocidad se escribe en general en la forma
~u = r~jr + rϕ~jϕ
Comparando las dos expresiones anteriores tenemos las ecuaciones diferenciales
r = c cos ϕ− v,
rϕ = −c sin ϕ
Interesa determinar una relacion entre r y ϕ. Las ecuaciones anteriores proporcio-nan la ecuacion diferencial
dr
dϕ=
dr
dt
dt
dϕ=
r
ϕ= −r
c cos ϕ− v
c sen ϕ

58 Capıtulo 2
La solucion de esta ecuacion es
r = r0(tg(ϕ/2))v/c
sin ϕ
siendo r0 la constante de integracion a determinar utilizando las condiciones ini-ciales r(π/2) = D. El valor para esta constante es entonces r0 = D, y en conse-cuencia
r =D
2
(senϕ/2)v/c−1
(cosϕ/2)v/c+1
Caso c<Vo, c=Vo
0
1
0.5
que proporciona la expresion para el camino que sigue el bote.• Consideremos ahora el caso particular en el cual c = v; el camino vendra
dado simplemente por
r =D
2(cosϕ/2)2
Pasando a coordenadas cartesianas, teniendo en cuenta que x = r cos ϕ, y = r sen ϕes facil ver que la expresion para el camino seguido por el bote se escribe en estecaso particular como
x = D
(2− 1
cos2(ϕ/2)
), y = 2D
sen(ϕ/2)
cos(ϕ/2)
y por tanto
y2 = −2D
(x− D
2
)
Se trata por lo tanto de una parabola con vertice en el punto (D/2, 0) y foco enel origen de coordenadas.

Cinematica de una partıcula 59
Caso c>Vo
0
1
• Volviendo al caso general en el cual v 6= c, las expresiones correspondientespara x e y son
x =D
2
(senϕ/2)v/c−1
(cosϕ/2)v/c+1cos ϕ
y =D
2
(senϕ/2)v/c−1
(cosϕ/2)v/c+1sen ϕ
Para el instante inicial en el cual el bote se encuentra en el punto P , ϕ = π/2 yse tiene que x = 0, y = D. Para un valor del angulo ϕ = 0, el bote llegara a laorilla opuesta y entonces y = 0 mientras que el valor de la coordenada x dependedel valor de v/c. Si v/c > 1 entonces x = 0, y si v/c < 1 el eje X es una asintotade la curva. Como vimos anteriormente, para el caso particular en que v = c lacoordenada x para ϕ = 0 es exactamente x = D/2. Por lo tanto para que elbote llegue a la otra orilla es condicion necesaria que v > c. En el caso particularv = c el bote alcanzara la otra orilla pero no en el punto Q, sino que lo hara a unadistancia D/2 de Q. Las graficas muestran el camino seguido por el bote en losdistintos casos

60 Capıtulo 2
9) Un punto describe una circunferencia de radio R en sentido contrario a lasagujas del reloj, de forma que la componente de su aceleracion sobre un diametrofijo, que se tomara como el eje de las X, es nula. Sabiendo que en t = 0 lacomponente del vector velocidad paralela al citado diametro vale v0, hallar, enfuncion de ϕ y del tiempo:
a) Los vectores posicion, velocidad y aceleracion de la partıcula.b) Las componentes intrınsecas del vector aceleracion.
Solucion
• El vector de posicion de la partıcula viene dado por
~r = R(cos ϕ~i + sen ϕ~j)
• y los vectores velocidad y aceleracion seran:
~v = R(− sen ϕ~i + cos ϕ~j)ϕ
~a = −R(cos ϕ~i + sin ϕ~j)ϕ2 + R(− sen ϕ~i + cos ϕ~j)ϕ
respectivamente. Puesto que la componente de la aceleracion sobre el eje X esnula, ax = 0, tendremos la siguente ecuacion para ϕ
− cos ϕϕ2 − sen ϕϕ = 0
cuya solucion, con las condiciones iniciales vx = v0, toma la forma
ϕ = − v0
R sen ϕ
Los vectores velocidad y aceleracion se escrben entonces en terminos de ϕ en laforma
~v = v0(~i− cotan ϕ~j)
~a = − v20
R sen3 ϕ~j
Si deseamos escribir los vectores en funcion del tiempo, bastara con integrar denuevo la ecuacion diferencial para ϕ, obteniendose de esta forma
cos ϕ =v0
R(t− t0)
• El modulo de la velocidad es:v =
v0
sin ϕ

Cinematica de una partıcula 61
de forma que el vector tangente es:
~t =~v
v= (sen ϕ,− cos ϕ)
y el normal sera
~t =~v
v= (cos ϕ, sen ϕ)
• A continuacion pasamos a calcular las componentes intrınsecas de la aceleracion.
at = ~a.~t =v2
0
R
cos ϕ
sin3 ϕ
an = ~a.~n = −v20
R
1
sin2 ϕ

62 Capıtulo 2
10) Un punto P de una circunferencia de radio R rueda sin resbalar sobre el ejeX con velocidad angular ω. Encontrar las ecuaciones parametricas que describenel movimiento de dicho punto. Determinar asimismo la curvatura, la velocidad yla aceleracion, y las componentes intrınsecas de esta. ¿ Cuales son las velocidadesmamima y mınima y a que punto de la curva corresponden?
Solucion
Supongamos inicialmente el centro de la circunferencia en el punto de coordenadas(0, R) y el punto P en el extremo derecho del dimetro horizontal. Sea φ = ωt elangulo descrito por la circunferencia en un tiempo t. En estas condiciones es facilcomprobar que las ecuaciones parametricas que describen el movimiento de P son
x = R(ωt + cos ωt),
y = R(1− sin ωt)
A continuacion procedemos a determinar la curvatura. Para ello calculamos enprimer lugar el elemento diferencial de arco
ds = Rω√
(1− sin(ωt))2 + cos2(ωt) dt = Rω√
2(1− sin(ωt))dt
El vector tangente sera
~t =d~r
ds=
d~r
dt
dt
ds=
1√2
(√1− sen(ωt),−
√1 + sen(ωt)
)

Cinematica de una partıcula 63
La curvatura de la curva en cada punto vendra dada por el modulo del vector ~K
~K =d~t
ds=
1
4R
(−
√1 + sen(ωt)
1− sen(ωt),−1
)
y sera por tanto
K =1
4R
√2
1− sin(ωt)
de forma que el vector normal es :
~n = −√
2(√
1 + sen(ωt),√
1− sen(ωt))
• El Vector velocidad es:
~v = Rω (1− sen(ωt),− cos(ωt))
cuyo modulo es:v =
√2Rω
√1− sin(ωt)
y por tanto~v =
√2Rω
√1− sin(ωt)~t
Los valores maximos y mınimos de la velocidad, estos se encuentra respec-tivamente para ωt = 3π
2+ 2nπ y ωt = π
2+ 2nπ (siendo n un numero entero),
y toman, respectivamente, los valores vmax = 2ωR y vmin = 0. Los puntos dela curva donde la velocidad es maxima corresponden a puntos de coordenadasR(3π
2+ 2nπ, 2), mientras que aquellos donde la velocidad es nula se localizan en
los puntos R(π2
+ 2nπ, 0):• En cuanto al vector aceleracion sera:
~a = Rω2 (− cos(ωt), sin(ωt))
cuyo modulo es constantea = Rω2
y sus componentes normal y tangencial son:
at = ~a.~t = −Rω2
√2
√1 + sin(ωt)
an = ~a.~n =Rω2
√2
√1− sin(ωt)
Como consecuencia de lo anterior se deduce que el modulo de la aceleracionpermanece constante a lo largo de la curva aunque no lo hacen sus componentesintrınsecas.

64 Capıtulo 2

Capıtulo 3 .
Movimiento de una partıcula entres dimensiones: Fuerzascentrales
1. Movimiento de una partıcula en tres dimen-
siones
A la hora de plantear el movimiento en mas de una dimension, hemos de pensaren generalizar las magnitudes fundamentales. Tales magnitudes han de cumplirlas siguientes condiciones
• Ser suficientes para definir el sistema mecanico
• Estar claramente definidas
• Construir un sistema formal para definirlas, de modo que quedenpatentes sus leyes de transformacion.Las magnitudes fundamentales que hemos de definir son tres:
1) Momento lineal2) Energıa3) Momento angularEn tres dimensiones la posicion de un punto en el espacio en cada instante de
tiempo viene dado por el vector posicion
~r = ~r(t) (1.1)
mientras que la velocidad y la aceleracion seran
~v = ~r =d~r
dt(1.2)
65

66 Capıtulo 3
~a = ~r =d2~r
dt2(1.3)
1..1 Segunda ley de Newton: Momento lineal
Nuestro punto de partida son simplemente las leyes de Newton. La segunda leyde Newton se escribira en forma vectorial como
m~r = ~F (1.4)
El momento lineal se define como
~p = m~v (1.5)
y por tanto su variacion vendra dada por la ley de Newton
d~p
dt= ~F (1.6)
de forma que la variacion del momento cinetico es debida a la fuerzaaplicada
1..2 Fuerzas conservativas: Conservacion de la energıa
Si la fuerza es conservativa (irrotacional), significa que se puede escribir como
~F = − ~∇V =⇒ dV = ~∇V .d~r = −~F ~dr (1.7)
donde V es la Energıa potencial, que en el caso mas general sera funcion de ~r,~r y t (sin embargo, en la mayorıa de los casos nos limitaremos a potenciales quesolo dependen de la posicion). Se define la energıa como
E = T + V (1.8)
siendo T la energıa cinetica
T =1
2m(~r)2 (1.9)
La variacion de la energıa con el tiempo sera
dE
dt=
dT
dt+
dV
dt= m~r.~r + ~∇V .~r (1.10)
Empleando (1.4) y (1.7)
dE
dt= ~r. ~F − ~F .~r = 0 (1.11)
Por tanto, Para fuerzas conservativas la energıa es una constante delmovimiento.

Movimiento de una partıcula en tres dimensiones 67
1..3 Fuerzas centrales: Conservacion del momento angular
El momento angular se define como
~L = ~r × ~p = m~r × ~r (1.12)
Su variacion con el tiempo es:
d~L
dt= m~r × ~r + m~r × ~r (1.13)
Empleando (1.4)
d~L
dt= ~r × ~F (1.14)
que se anula cuando la fuerza esta dirigida en la direccion radial. Para fuerzascentrales, el momento angular es una constante del movimiento.
2. Potencial efectivo
A partir de ahora vamos a dedicarnos al estudio de fuerzas centrales
~F = F (r)~jr −→ V (r) = −∫
F (r)dr (2.1)
para las cuales tanto E como ~L son conservadas. Notese que toda fuerza centrales conservativa pero no al reves.
La constancia de ~L significa que el plano formado por ~r y ~r es constante y portanto el movimiento se realiza en un plano. Podemos pues sin restriccion elegir eleje z en la direccion de ~L de manera que el movimiento se realizara en el planoXY . En consecuencia
z = 0, θ =π
2r = ρ
Las coordenadas adecuadas a este problema son polares planas, en las cuales:
~r = r~jr (2.2)
~r = r~jr + rϕ~jϕ (2.3)
(~r)2 = (r)2 + r2ϕ2 (2.4)
de manera que la conservacion de L y E se escribe:
L = mr2ϕ
E =1
2m(r2 + r2ϕ2) + V (r) (2.5)

68 Capıtulo 3
eliminando ϕ entre ambas
E =1
2mr2 +
[L2
2mr2+ V (r)
](2.6)
Para un valor dado de L esta ecuacion tiene la misma forma que la ecuacionde conservacion de la energıa en una dimension con un potencial efectivo dela forma
U(r) =L2
2mr2+ V (r) (2.7)
dondeL2
2mr2puede considerarse como el potencial correspondiente a la fuerza
centrıfuga − L2
mr3~jr. En consecuencia, las leyes de conservacion nos han permitido
reducir un problema tridimensional a uno unidimensional que se limita a estudiarla variacion de la coordenada r en el potencial U(r) con la salvedad de que r solopuede tomar valores positivos.
2..1 Puntos de retroceso
Puesto que la velocidad radial es:
r =
√2
m(E − U(r))
el movimiento solo podra existir para aquellos valores de r para los cuales
U(r) ≤ E
los puntos en los cuales E = U(r) se denominan puntos de retroceso. En ellos lavelocidad radial es cero y la velocidad esta dirigida en la direccion de jϕ por loque la posicion y la velocidad son perpendiculares. Si ~r1 es un punto de retroceso,entonces:
~r1 = r1~jr1
~v1 = r1ϕ1~jϕ1 (2.8)
2..2 Estados ligados y estados de difusion
Los estados para los cuales la energıa, el momento y/o las condiciones inicialesson tales que la partıcula permanece confinada entre dos puntos de retroceso sedenominan estados ligados. Conviene tomar las condiciones iniciales en uno de lospuntos de retroceso
Por el contrario si r puede ser indefinidamente grande se trata de un estado dedifusion (o scattering). En estos casos las condiciones iniciales conviene tomarlasen el infinito

Movimiento de una partıcula en tres dimensiones 69
3. El oscilador armonico tridimensional
Corresponde a una partıcula sometida a una fuerza
~F = −k~r (3.1)
y por tanto
V (r) =1
2kr2 (3.2)
3..1 Resolucion en coordenadas cartesianas
La ecuacion (3.1) puede escribirse en cartesianas en la forma
mx + kx = 0
my + ky = 0
mz + kz = 0 (3.3)
La ecuacion del movimiento de cada coordenada es analoga a la de un osciladorarmonico unidimensional. La solucion general es:
x = a1 cos(ωt− θ1)
y = a2 cos(ωt− θ2)
z = 0 (3.4)
donde hemos hecho
ω =
√k
m(3.5)
Dado que el momento angular es constante, el movimiento puede considerarse sinrestriccion, confinado al plano XY. Hay por tanto cuatro constantes de integracion.Dado que es un estado ligado, conviene tomar las condiciones iniciales de formaque
~r(0) = r0~i
~r(0) = v0~j (3.6)
de forma que para t = 0 esten en un punto de retroceso y en consecuencia ~r0 y ~v0
sean perpendiculares. Substituyendo (3.6) en (3.4) tenemos
r0 = a1 cos θ1
0 = a2 cos θ2
0 = −ωa1 sin θ1
v0 = −ωa1 sin θ1 (3.7)

70 Capıtulo 3
que combinadas proporcionan
a1 = r0
a2 = −v0
ωθ1 = 0
θ2 =π
2(3.8)
y por tanto la trayectoria es:
x = r0 cos(ω0t)
y = − v0
ω0
sin (ω0t) (3.9)
y la orbita es la elipsex2
r20
+y2
(v0/ω0)2= 1 (3.10)
• Conservacion de la energıa
E =1
2mv2
0 +1
2mω2r2
0 (3.11)
• Conservacion del momento angular
Lx = 0, Ly = 0
Lz = ma1a2ω0 sin (θ2 − θ1) = mr0v0 (3.12)
3..2 Resolucion en coordenadas esfericas
Para ver de que orbita se trata es preferible resolver el problema en polares
• Potencial efectivo
U(r) =1
2kr2 +
L2
2mr2(3.13)
El potencial se encuentra representado en la figura. Su mınimo R es
(dU
dr
)
r=R
= 0 =⇒ R =
(L
mω
)1/2
=⇒ U(R) = ωL (3.14)

Movimiento de una partıcula en tres dimensiones 71
R
r1 r2
• Puntos de retroceso
Los puntos de retroceso son las soluciones de la ecuacion E = U(r), es decir:
E =1
2kr2 +
L2
2mr2
Por tanto:
r21 =
E
k
(1−
√1− L2k
mE2
)=
(v0
ω0
)2
r22 =
E
k
(1 +
√1− L2k
mE2
)= r2
0 (3.15)
Podemos escribir las constantes del movimiento en terminos de los puntos de retro-ceso:
r21 + r2
2 =2E
k
r1r2 =L
mω(3.16)
E =k
2(r2
1 + r22)
L = mωr1r2 (3.17)
• Ecuacion del movimiento

72 Capıtulo 3
Las ecuaciones del movimiento son:
L = mr2ϕ
E =1
2mr2 +
1
2kr2 +
L2
2mr2
o bienϕ = ω
r1r2
r2(3.18)
r2r2 = −ω2r21r
22 + ω2(r2
1 + r22)r
2 − ω2r4 (3.19)
• Orbita
Para calcular la orbita, hemos de eliminar el tiempo. Para ello, hacemos
r2(t) =1
p(ϕ)(3.20)
en cuyo caso
2rr = − 1
p2ϕ
dp
dϕ
empleando (3.18)
2rr = −ωr1r2
pp′ (3.21)
donde p′ = dpdϕ
Substituyendo en (3.18)
ω2r21r
22p′2 = −4ω2r2
1r22p
2 + 4ω2(r21 + r2
2)p− 4ω2
p′2 = −4p2 + 4r21 + r2
2
r21r
22
p− 4
r21r
22
completado cuadrados
p′2 = −4
(p− r2
1 + r22
2r21r
22
)2
+ 4(r21 + r2
2
2r21r
22
)2 − 4
r21r
22
o bien
p′2 = −4
(p− r2
1 + r22
2r21r
22
)2
+
(r22 − r2
1
r21r
22
)2
p′2 =
(r22 − r2
1
r21r
22
)2(
1−(
2r21r
22
r22 − r2
1
)2 (p− r2
1 + r22
2r21r
22
)2)
haciendo
q =
(2r2
1r22
r22 − r2
1
)(p− r2
1 + r22
2r21r
22
)(3.22)
Movimiento de una partıcula en tres dimensiones 73
(r22 − r2
1
2r21r
22
)2
q′2 =
(r22 − r2
1
r21r
22
)2
(1− q2)
q′ = 2√
1− q2 (3.23)
integrandoarcsen q = 2ϕ + α0
deshaciendo el cambio
p =r22 + r2
1
2r21r
22
+r22 − r2
1
2r21r
22
sin (2ϕ + α0)
r2 =2r2
1r22
(r22 + r2
1) + (r22 − r2
1) sin (2ϕ + α0)
orientando la orbita de forma que para ϕ = 0 estemos en r1, r(0) = r1
sin α0 = 1 =⇒ α0 = π/2
y por tanto1
r2=
r22 + r2
1
2r21r
22
+r22 − r2
1
2r21r
22
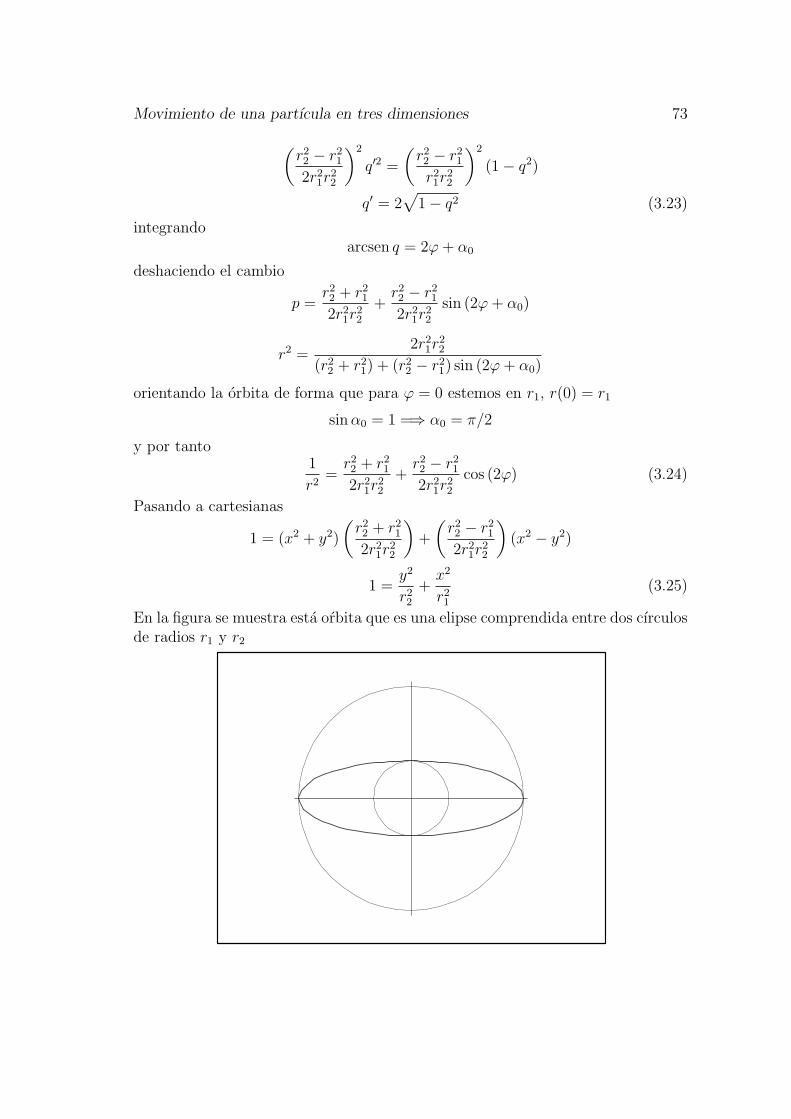
cos (2ϕ) (3.24)
Pasando a cartesianas
1 = (x2 + y2)
(r22 + r2
1
2r21r
22
)+
(r22 − r2
1
2r21r
22
)(x2 − y2)
1 =y2
r22
+x2
r21
(3.25)
En la figura se muestra esta orbita que es una elipse comprendida entre dos cırculosde radios r1 y r2

74 Capıtulo 3
4. Potencial de Coulomb
La fuerza de Coulomb es:~F = ± k
r2~jr (4.1)
donde el signo + indica que la fuerza es repulsiva y el − que es atractiva Elpotencial correspondiente sera
V = ±k
r(4.2)
4..1 Caso repulsivo
• Potencial efectivoel potencial efectivo sera
U(r) =k
r+
L2
2mr2(4.3)
que no tiene mınimos y tiene un unico punto de retroceso. Para que el movimientosea posible E > 0
Potencial de Coulomb. Caso repulsivo
E
R1
• Punto de retroceso. El punto de retroceso r1 se puede calcular como
E = U(r1) =k
r1
+L2
2mr21
La unica solucion positiva de esta ecuacion es:
r1 =k
2E(1 + ε) (4.4)

Movimiento de una partıcula en tres dimensiones 75
donde
ε =
√1 +
2EL2
mk2(4.5)
• Condiciones iniciales Puesto que los estados son de difusion, las condicionesinciales han de tomarse en el infinito. En particular, aqui orientaremos la orbitasuponiendo que la partıcula entra paralela al eje x, es decir que para ϕ = π:
~r (ϕ = π) = (−∞, b)
~r (ϕ = π) = (v0, 0) (4.6)
donde b es el parametro de impacto Las constantes del movimiento son portanto
E =1
2mv2
0
L = mbv0 (4.7)
y en tal caso:
ε =
√1 +
b2m2v40
k2(4.8)
de forma quek
2E=
k
mv20
=b√
ε2 − 1(4.9)
r1 = b
√(ε + 1)
(ε− 1)(4.10)
de manera que las caracterısticas de la orbita van a depender de b y ε que a su vezson las condiciones iniciales• Ecuacion del movimiento
Las ecuaciones del movimiento seran
L = mr2ϕ
E =1
2mr2 +
k
r+
L2
2mr2
Para eliminar el tiempo hacemos
r(t) =1
p(ϕ)=⇒ r = − p′
p2ϕ = −L
mp′ (4.11)
y por tanto
E =L2
2mp′2 + kp +
L2p2
2m

76 Capıtulo 3
empleando (4.5) y (4.7)
p′2 =1
b2− p2 − 2
b√
ε2 − 1p (4.12)
completando cuadrados
p′2 =ε2
b2(ε2 − 1)− (p +
1
b√
(ε2 − 1))2
p′2 =ε2
b2(ε2 − 1)
1−
p + 1
b√
(ε2−1)
εb√
ε2−1
2 (4.13)
haciendo
q =p + 1
b√
(ε2−1)
εb√
ε2−1
(4.14)
q′ =√
1− q2 =⇒ arcsen q = ϕ− ϕ0 (4.15)
deshaciendo los cambios1
r=
ε sin(ϕ− ϕ0)− 1
b√
(ε2 − 1)
De acuerdo con las condiciones iniciales propuestas, hemos de orientar la orbitade forma que r(π) = ∞. Por tanto
0 = ε sin(π − ϕ0)− 1
y en consecuencia
sin ϕ0 =1
ε(4.16)
r =b√
(ε2 − 1)
ε sin (ϕ− ϕ0)− 1=
r1
√(ε− 1)
ε sin (ϕ− ϕ0)− 1(4.17)
de forma que la partıcula est en el punto de retroceso r1 para ϕ = α0 + π2
• AsintotasLas asintotas correponden a sin (ϕ− ϕ0) = 1
ε. Hay por tanto dos asintotas:
ϕA = π, ϕA = 2ϕ0
Las ecuaciones de las asıntotas seran
y = c + tg ϕAx

Movimiento de una partıcula en tres dimensiones 77
donde la ordenada en el origen es:
c = limϕ→ϕA(y − tg ϕAx) = limϕ→ϕA
(r sin(ϕ− ϕA)
cos ϕA
)
c = limϕ→ϕA
b√
(ε2 − 1)
ε sin (ϕ− ϕA)− 1
sin(ϕ− ϕA)
cos ϕA
)
Resolviendo la indeterminacion
c = limϕ→ϕA
b√
(ε2 − 1)
ε cos ϕA cos (ϕ− ϕA)(4.18)
? Asıntota de entrada:
ϕA = π, c = b =⇒ y = b
Θ
Θ
Θ
Θ
? Asıntota de salida:
ϕA = 2ϕ0, c = bε2
ε2 − 2
y =ε2
ε2 − 2+
2√
ε2 − 1
ε2 − 2x
Por tanto el angulo de dispersion es:
Θ = 2ϕ0 = 2 arcsen1
ε= 2 arctg
1√ε2 − 1
= 2 arctgk
mv20b
(4.19)
Las dos asıntotas se cortan en el punto (x = −a, y = b).

78 Capıtulo 3
4..2 Caso Atractivo
• Potencial efectivoel potencial efectivo sera
U(r) =−k
r+
L2
2mr2(4.20)
que tiene un mınimo que corresponde al valor r = R tal que U ′(R) = 0, es decir:
R =L2
mk(4.21)
En este punto el valor del potencial es:
U(R) = −mk2
2L2
Por tanto para que el movimiento sea posible, ha de ser:
E ≥ −mk2
2L2(4.22)
Podemos pues distinguir tres casos:
Caso a) −mk2
2L2 < E < 0
Resulta util hacer E = −H
Potencial de Coulomb. Caso atractivo. E<0

Movimiento de una partıcula en tres dimensiones 79
• Hay dos puntos de retroceso dados por:
−H =−k
r+
L2
2mr2
y por tanto
r1 =k
2H
(1−
√1− 2HL2
mk2
)
r2 =k
2H
(1 +
√1− 2HL2
mk2
)(4.23)
de manera que
r1 + r2 =k
H≡ 2a
r1r2 =L2
2mH≡ b2
ε ≡√
1− b2
a2(4.24)
y por tanto
H =k
2a
L2 = mkb2
a(4.25)
y
r1 = a(1− ε)
r2 = a(1 + ε)
b = a√
1− ε2 (4.26)
• Ecuacion del movimientoLas ecuaciones del movimiento seran
L = mr2ϕ
−H =1
2mr2 − k
r+
L2
2mr2
Para determinar la orbita haremos
r(t) =1
p(ϕ)=⇒ r = −L
mp′ (4.27)

80 Capıtulo 3
de forma que la ecuacion de conservacion de la energıa es:
p′2 = −p2 +2mk
L2p− 2mH
L2
Utilizando (4.22)
p′2 = −p2 + 2a
b2p− 1
b2
Completando cuadrados
p′2 = −(p− a
b2
)2
+a2
b4− 1
b2= −
(p− a
b2
)2
+a2ε2
b4
o bien
p′2 =a2ε2
b4
(1−
(b2p
aε− 1
ε
)2)
Haciendo el cambio
q =b2p
aε− 1
ε(4.28)
la ecuacion de la orbita es:
q′ =√
1− q2 =⇒ q = sin (ϕ− α0) (4.29)
y por tanto, deshaciendo los cambios
1
r=
a
b2(1 + ε sin (ϕ− α0))
Orientando la orbita de forma que para ϕ = 0, r = r1 = a(1− ε)
α0 = −π/2
de forma que
1
r=
a
b2(1 + ε cos ϕ) (4.30)

Movimiento de una partıcula en tres dimensiones 81
Potencial de Coulomb atractivo. Orbita para E<0
No es dıficil comprobar que para ϕ = π, r = r2. La orbita es una elipseestando el centro de fuerzas situado en el foco.
• Podemos calcular el perıodo de la orbita a partir de
1
2m(r)2 =
H(r2 − r)(r − r1)
r2
de forma que∫ r2
r1
dr√(r2 − r)(r − r1)
=
∫ T2
0
√2H
mdt
(r2 + r1)π
2=
√2H
m
T
2
Teniendo en cuenta r2 + r1 = 2a y H = k2a
aπ =
√k
ma
T
2
elevando al cuadrado
a3 =k
m(
T
2π)2
que es la tercera ley de Kepler
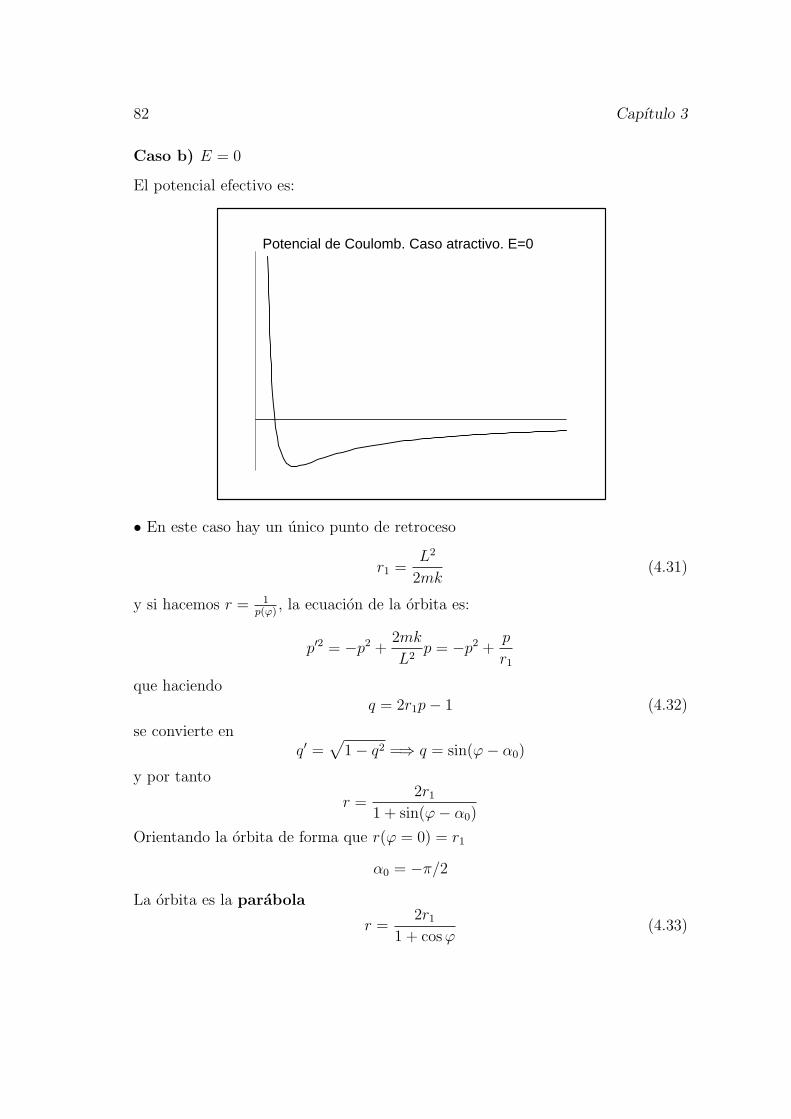
82 Capıtulo 3
Caso b) E = 0
El potencial efectivo es:
Potencial de Coulomb. Caso atractivo. E=0
• En este caso hay un unico punto de retroceso
r1 =L2
2mk(4.31)
y si hacemos r = 1p(ϕ)
, la ecuacion de la orbita es:
p′2 = −p2 +2mk
L2p = −p2 +
p
r1
que haciendoq = 2r1p− 1 (4.32)
se convierte enq′ =
√1− q2 =⇒ q = sin(ϕ− α0)
y por tanto
r =2r1
1 + sin(ϕ− α0)
Orientando la orbita de forma que r(ϕ = 0) = r1
α0 = −π/2
La orbita es la parabola
r =2r1
1 + cos ϕ(4.33)

Movimiento de una partıcula en tres dimensiones 83
Potencial de Coulomb atractivo. E=0
Caso c) E > 0
Potencial de Coulomb. Caso atractivo. E>0
• Punto de retroceso. El punto de retroceso r1 se puede calcular como
E = U(r1) =−k
r1
+L2
2mr21
La unica solucion positiva de esta ecuacion es:
r1 =k
2E
(−1 +
√1 +
2EL2
mk2
)(4.34)

84 Capıtulo 3
• Condiciones iniciales Puesto que los estados son de difusion, las condicionesinciales han de tomarse en el infinito. En particular, aqui orientaremos la orbitasuponiendo que la partıcula entra paralela al eje x, es decir que para ϕ = π:
~r(ϕ = π) = (−∞, b)
~v(ϕ = π) = (v0, 0) (4.35)
donde b es el parametro de impacto Las constantes del movimiento son portanto
E =1
2mv2
0
L = mbv0 (4.36)
y se pueden definir por tanto las longitudes:
b =
√L2
2mE
a =k
2E(4.37)
asi como
ε =
√1 +
b2
a2(4.38)
de forma quer1 = a(−1 + ε) (4.39)
E =k
2a
L2 = mkb2
a(4.40)
• Ecuacion del movimientoLas ecuaciones del movimiento seran
L = mr2ϕ
E =1
2mr2 − k
r+
L2
2mr2
Para eliminar el tiempo hacemos
r(t) =1
p(ϕ)=⇒ r = − p′
p2ϕ = −L
mp′ (4.41)

Movimiento de una partıcula en tres dimensiones 85
y por tanto
E =L2
2mp′2 − kp +
L2p2
2m
p′2 =1
b2− p2 +
2a
b2p (4.42)
completando cuadrados
p′2 =1
b2− (p− a
b2)2 +
a2
b4=
ε2a2
b4− (p− a
b2)2
p′2 =ε2a2
b4
(1−
(b2p− a
aε
)2)
(4.43)
haciendo
q =b2p− a
aε(4.44)
q′ =√
1− q2 =⇒ arcsen q = ϕ + α0 (4.45)
deshaciendo los cambios
1
r=
a
b2(1 + ε sin (ϕ + α0))
De acuerdo con las condiciones iniciales propuestas, hemos de orientar la orbitade forma que r(π) = ∞. Por tanto
0 = 1 + ε sin (π + α0)
y en consecuencia
sin α0 =1
ε(4.46)
r =b2
a(ε sin (ϕ + α0) + 1)(4.47)
• AsintotasLas asintotas correponden a sin (ϕ + α0) = −1
ε. Hay por tanto dos asintotas:
ϕ = π, ϕ = −2α0
Para calcular la asintota hemos de determinar la ordenada en el origen
c = limϕ→ϕ0(y − tg ϕ0x)
ac = limϕ→ϕ0(b2
ε sin (ϕ + α0) + 1)(sin ϕ− tg ϕ0 cos ϕ)

86 Capıtulo 3
ac = limϕ→ϕ0
(b2
(ε sin (ϕ + α0) + 1)cosϕ0
)sin (ϕ− ϕ0)
aplicando L’Hopital
ac = limϕ→ϕ0
(b2
ε cos(ϕ + α0) cosϕ0
)cos(ϕ− ϕ0)
ac =
(b2
ε cos(ϕ0 + α0) cosϕ0
)
de manera que
c =b2
a√
ε2 − 1= b si ϕ0 = π
c =b2
aε cos α0 cos 2α0
= bε2
ε2 − 2si ϕ0 = −2α0
Coulomb atractivo. Orbita para E>0
la asıntota de entrada es:y = b
la asıntota de salida
y =b
ε2 − 2
(1 +
b2
a2− 2
x
a
)
Por tanto el angulo de dispersion es:
Θ = −2ϕ0 = −2 arcsen1
ε= −2 arctg
1√ε2 − 1
= −2 arctga
b

Movimiento de una partıcula en tres dimensiones 87
Teniendo en cuenta que a = kmv2
0, podemos escribir el angulo de dispersion en
terminos de las condiciones iniciales como
Θ = −2 arctgk
mv20b
(4.48)
5. Seccion eficaz
5..1 Concepto de seccion eficaz y seccion eficaz diferencial
Una de las maneras mas importantes de obtener informacion acerca de la estruc-tura de cuerpos pequenos es bombardearlos con partıculas y medir el numero departıculas dispersadas en las distintas direcciones. La distribucion angular de laspartıculas dispersadas dependera de la naturaleza del blanco que se bombardea yde las fuerzas que actuan entre este y las partıculas.
En el caso de colisiones entre partıculas atomicas, la region en la cual la trayec-toria se desvıa es muy pequena y la magnitud observable es el angulo de dispersion.
La situacion experimental es la siguiente:
• A la entrada
Se envıa un chorro de partıculas con una determinada energıa E = (1/2)mv20 donde
v0 es medible, y diferentes parametros de impacto b (que no es un observable). SeaN el numero de partıculas enviadas. N no es medible pero si lo es n definidocomo el numero de partıculas que atraviesan la unidad de area perpendicular a ladireccion de incidencia y por tanto
n =dN
dσ(5.1)
donde dσ es el elemento de area perpendicular a la direccion de incidencia y portanto en terminos del parametro del impacto
dσ = bdbdΦ (5.2)

88 Capıtulo 3
Θ
Φ
Θ
Φ
Ω
• A la salida
El otro dato medible es la distribucion angular, es decir, cuantas partıculas sedispersan con angulos de dispersion comprendidos ente Θ y Θ + dΘ
NΘ =dN
dΩ(5.3)
siendo dΩ el angulo solido subtendido por dΘ
dΩ = sin ΘdΘdΦ (5.4)
Combinando (5.3) y (5.1)
NΘ = ndσ
dΩ(5.5)
y por tanto la fraccion de partıculas dispersadas es:
NΘ
n=
dσ
dΩ(5.6)
Substituyendo (5.2) y (5.4)
NΘ
n=
dσ
dΩ= b sin Θ
db
dΘ(5.7)

Movimiento de una partıcula en tres dimensiones 89
La magnitud dσdΩ
se denomina seccion eficaz diferencial y es el area normala la direccion de incidencia que atraviesan las partıculas que se dispersan en unangulo solido dΩmientras que
σ =
∫dσ
dΩdΩ (5.8)
es la seccion eficaz total y da cuenta del area total que han atravesado todas laspartıculas que sufren dispersion
? Calculo experimentaldσ
dΩ=
NΘ
n(5.9)
? Calculo Teoricodσ
dΩ=
b
sin Θ
db
dΘ(5.10)
donde es necesario conocer la funcion b(Θ) es decir como depende el angulo dedispersion del parametro de impacto
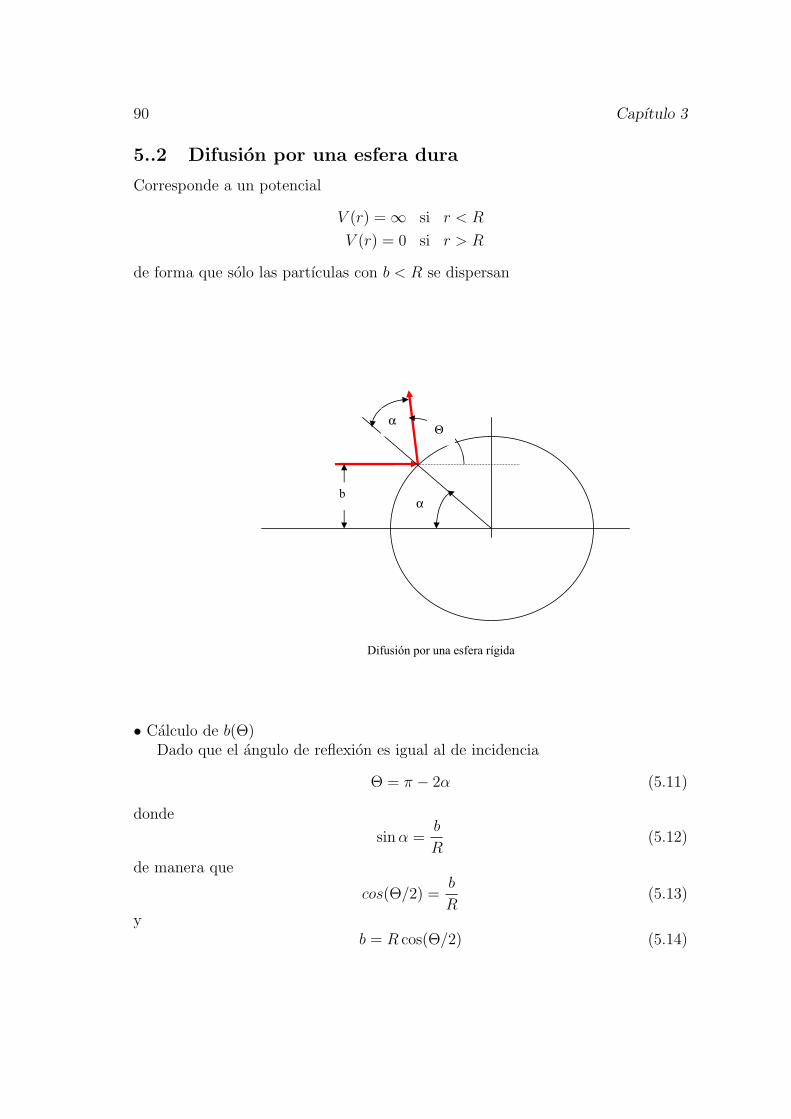
90 Capıtulo 3
5..2 Difusion por una esfera dura
Corresponde a un potencial
V (r) = ∞ si r < R
V (r) = 0 si r > R
de forma que solo las partıculas con b < R se dispersan
α
α Θ
• Calculo de b(Θ)Dado que el angulo de reflexion es igual al de incidencia
Θ = π − 2α (5.11)
donde
sin α =b
R(5.12)
de manera que
cos(Θ/2) =b
R(5.13)
yb = R cos(Θ/2) (5.14)

Movimiento de una partıcula en tres dimensiones 91
• Calculo de dσdΩ
dσ
dΩ=
R2
2
sin(Θ/2) cos(Θ/2)
sin Θ
dσ
dΩ=
R2
4(5.15)
como la seccion eficaz diferencial es constante se dice que es isotropa ya que elnumero de partıculas difundidas en cualquier direccion es el mismo.
• Calculo de σ
σ =R2
4
∫ 2π
0
dθ
∫ π
o
sin ΘdΘ =R2
42π2
σ = πR2 (5.16)
La partıculas que se dispersan atraviesan una superficie equivalente a la de unacircunferencia de radio R
5..3 Difusion de Rutherford
Segun hemos visto ((4.16) y (4.45)). para el potencial de Coulomb
b =| k
mv0 tg(Θ/2)| (5.17)
y por tantodb
dΘ=| k
2mv20
1
sin2(Θ/2)| (5.18)
Substituyendo en (5.9)
dσ
dΩ=
(k
mv20
)21
2 sin2(Θ/2) tg(Θ/2)
1
sin Θ=
(k
mv20
)21
4 sin4(Θ/2)
y por tanto
dσ
dΩ=
(k
2mv20
)21
sin4(Θ/2)(5.19)
La integracion proporciona
σ =
∫dσ
dΩdΩ = 2π
(k
2mv20
)2 ∫ π
0
sinΘdΘ
sin4(Θ/2)= ∞ (5.20)
como corresponde al hecho de que el potencial de Coulomb tiene alcance infinitoy por tanto hay dispersion para cualquier parametro de impacto por grande queeste sea.

92 Capıtulo 3
5..4 Aproximacion de angulos pequenos
Veamos ahora que sucede cuando calculamos la seccion eficaz en la aproximacionde angulos pequenos sin necesidad de conocer a priori el angulo de dispersion. Enesta aproximacion
sin Θ =p′yp′
siendo p′ el momento lineal final de la partıcula y p′y el momento lineal final en ladireccion y. Si el angulo es pequeno podemos aproximar
p′ ≈ p′x ≈ p = mv0
debido a que el momento lineal en la direccion x practicamente se conserva. En ladireccion y
p′y =
∫ ∞
−∞Fydt
con lo cual
sinΘ =
∫∞−∞ Fydt
mv0
Las fuerzas consideradas son fuerzas centrales conservativas, luego entonces
Fy = −∂V
∂y= −∂V
∂r
∂r
∂y= −∂V
∂r
y
r
y por lo tanto
sin Θ =− ∫∞
∞∂V∂r
yrdt
mv0
En la aproximacion de angulos pequenos podemos considerar la trayectoria de lapartıcula como una linea recta de ecuacion
y = b, x = v0t
y por tantodx = v0dt
Utilizando las expresiones anteriores tenemos para el angulo de dispersion en estaaproximacion
sin Θ = − 2
mv20
∫ ∞
b
∂V
∂r
b
r
r√r2 − b2
dr
donde hemos utilizado que
dx =∂x
∂rdr =
r
xdr =
r√r2 − y2
dr =r√
r2 − b2dr

Movimiento de una partıcula en tres dimensiones 93
Por lo tanto
sin Θ ≈ Θ = − 2b
mv20
∫ ∞
b
∂V
∂r
dr√r2 − b2
La integral se ha multiplicado por dos para tener en cuenta la contribucion de las xpositivas y negativas. La expresion anterior representa el angulo de dispersion parauna partıcula sometida a un potencial V en terminos del parametro de impactoen la aproximacion de angulos pequenos.

94 Capıtulo 3
6. Problemas
Enunciados
1) Encontrar cual de las siguientes fuerzas es conservativa y para la que lo seahallar el potencial
a) Fx = ax + by2, Fy = az + 2bxy, Fz = ay + bz2
b) Fx = ay, Fy = az, Fz = axc) Fr = 2ar sin θ sin ϕ, Fϕ = ar cos ϕ, Fθ = ar cos θ sin ϕ
d) ~F = r~a
e) ~F = ~a× ~r
f) ~F = (~a.~r)~a2) Una partıcula de masa m se mueve bajo la accion de una fuerza central cuyopotencial es V (r) = kr4 con k > 0. ¿Para que energıa y momento angular serala orbita una circunferencia con centro en el origen? ¿Cual es el periodo de estemovimiento circular? Si se perturba ligeramente el movimiento, ¿cual sera elperiodo de las pequenas oscilaciones radiales alrededor de r = a?
3) Dado el potencial V (r) = −kr−n, siendo k una constante positiva, demostrarque las orbitas circulares son inestables para n > 2.
4) En algunos libros de Fısica elemental se acostumbra a igualar la fuerza gravi-tatoria con la centrıfuga para efectuar ciertos calculos de orbitas planetarias. Ra-zonar que esto solamente es util en el caso de orbitas circulares y aprovechar elrazonamiento para calcular el radio de curvatura en el afelio de una orbita elıpticaen funcion de los parametros habituales.
5) Un satelite artificial de masa m describe una orbita circular de radio R. Enun cierto instante su velocidad se reduce a la mitad y el satelite pasa a una orbitaelıptica. Calcular la energıa, el momento angular y los semiejes de la nueva orbita.
6) Se ha observado un cometa cuya distancia mınima al Sol es la mitad del radiode la orbita terrestre (supuesta circular) y cuya velocidad para esa distancia es eldoble de la velocidad orbital de la Tierra. ¿Se podra observar dicho cometa en elfuturo?
7) Se considera un sistema planetario de ficcion en el que la Estrella-Sol correspon-diente genera un campo conservativo del tipo V = kr3/3, siendo k una constantepositiva. Un planeta de este sistema tiene inicialmente una velocidad ~v0 ortogonala la fuerza central. ¿Para que valor del modulo v0 la orbita del planeta sera unacircunferencia?
8) Un cometa se mueve en el campo gravitatorio del Sol con periodo T . En elperihelio la distancia del Sol al cometa es rp. Hallar la distancia del Sol al afeliode la orbita del cometa si se conoce el periodo de la Tierra alrededor del Sol y eleje mayor de la orbita de la Tierra.

Movimiento de una partıcula en tres dimensiones 95
9) Estudiar el potencial V = − k2r2 con k > 0.
10) Sea el vector
~M =1
m~L× ~p + k
~r
r
Demostrar que es una constante para el potencial V (r) = −kr. Utilizarlo para
calcular la trayectoria.
11) Una masa m se une mediante un hilo flexible ligero de longitud a a un resortecuya longitud es tambien a y su constante de recuperacion k. El otro extremo delresorte esta en un punto fijo O permitiendo el giro del hilo alrededor de ese punto.Demostrar que la ecuacion radial del movimiento de la masa para r > 2a es:
1
2mr2 +
L2
2mr2+
1
2k(r − 2a)2 = E
donde L es el momento angular y E la energıa total. ¿Cual es la ecuacion corre-spondiente para r < 2a?
Se tira de la masa hasta llevarla a una distancia 3a de O y se le da una velocidad ~v perpendicular al hilo.
a) ¿Para que valor de v sera circular la trayectoria de la masa?b) ¿Cual es el valor mınimo vm de v que mantendra tenso el hilo en todo
movimiento subsiguiente? Ayuda: El hilo se mantiene tenso siempre que la distancia al centro sea mayor que 2a.
c) Verificar que cuando v sea menor que vm la distancia rm de maxima aprox-imacion vendra dada por:
rm = 3a
[1 +
ka2
mv2
]−1/2
12) Sea el potencial V (r) = −kr
+ k′2r2 . Demostrar que las orbitas son elipses que
precesan.
13) Determinar la seccion eficaz para la ‘caıda” de partıculas en el centro de uncampo de fuerzas F = − k
r3 con k > 0.
14) Determinar la seccion eficaz para la “caıda” de partıculas en el centro de uncampo V = − k
rn con k > 0 y n > 2..
15) Analizar el proceso de scattering producido por una fuerza repulsiva centralde la forma F = kr−3. Mostrar que la seccion eficaz diferencial viene dada por laexpresion
dσ
dΩ=
k
2πE sin(πx)
1− x
x2(2− x)2
siendo E la energıa y x = Θ/π.
16) Hallar la seccion eficaz de Rutherford exacta y en la aproximacion de angulospequenos y comprobar que en ese lımite coinciden.

96 Capıtulo 3
1) Encontrar cual de las siguientes fuerzas es conservativa y para la que lo seahallar el potencial
a) Fx = ax + by2, Fy = az + 2bxy, Fz = ay + bz2
b) Fx = ay, Fy = az, Fz = axc) Fr = 2ar sin θ sin ϕ, Fϕ = ar cos ϕ, Fθ = ar cos θ sin ϕ
d) ~F = r~a
e) ~F = ~a× ~r
f) ~F = (~a.~r)~a
Solucion
• a) Fx = ax + by2, Fy = az + 2bxy, Fz = az + 2bxy Tenemos
~∇× ~F = (a− a, 0− 0, 2by − 2by) = 0
Por tanto
−∂V
∂x= ax + by2
−∂V
∂y= az + 2bxy2
−∂V
∂z= az + 2bxy2
Integrando
V =ax2
2+ by2x + ayz +
bz3
3
• b) Fx = ay, Fy = az, Fz = ax
En este caso
~∇× ~F = (−a,−a,−a)
luego no es no es conservativa
• c) Fr = 2ar sin θ sin ϕ, Fϕ = ar cos ϕ, Fθ = ar cos θ sin ϕ
Escribiendo el rotacional en esfericas
~∇× ~F =1
rsenθ
(∂Fθ
∂ϕ− ∂(Fϕsenθ)
∂θ
)~jr
+1
r
(∂Fr
∂θ− ∂(rFθ)
∂r
)~jϕ
+1
rsenθ
(∂(rsenθFϕ)
∂r− ∂Fr
∂ϕ
)~jθ

Movimiento de una partıcula en tres dimensiones 97
~∇× ~F = 0
luego es conservativa y por tanto
−∂V
∂r= 2ar sin θ sin ϕ
−∂V
∂ϕ= 2ar cos ϕ
−∂V
∂θ= ar cos θ sin ϕ
Integrando
V = −ar2 sin θ sin ϕ
• d) ~F = r~a
~∇× ~F = −1
r~a× ~r 6= 0
No es conservativa
• e) ~F = ~a× ~r
~∇× ~F = ~∇× (~a× ~r) = ~a(~∇.~r)− (~a.~∇)~r = 3~a− ~a
No es conservativa
• f) ~F = (~a.~r)~a
Hacendolo en cartesianas
~∇× ~F = 0
Luego es conservativa y el potencial es
V =1
2
(a2
xx2 + a2
yy2 + a2
zz2)
+ axayxy + axazxz + ayazyz

98 Capıtulo 3
2) Una partıcula de masa m se mueve bajo la accion de una fuerza central cuyopotencial es V (r) = kr4 con k > 0. ¿Para que energıa y momento angular serala orbita una circunferencia con centro en el origen? ¿Cual es el perıodo de estemovimiento circular? Si se perturba ligeramente el movimiento, ¿cual sera elperıodo de las pequenas oscilaciones radiales alrededor de r = a?
Solucion
• En primer lugar escribimos el potencial efectivo U(r) que sera de la forma
U(r) = kr4 +L2
2mr2
RE
Este potencial tiende a infinito para r tendiendo a cero y a infinito, y tendremos portanto estados ligados donde la partıcula se movera entre dos puntos de retroceso.El mınimo del potencial se localiza en r = R donde R es tal que
U ′(r) |r=R= 4kR3 − L2
mR3= 0
y por lo tanto
R6 =L2
4mk
Cuando la energıa es igual al mınimo del potencial, es decir, E = U(R), r per-manece constante a lo largo del movimiento y por lo tanto la orbita sera una

Movimiento de una partıcula en tres dimensiones 99
circunferencia con centro en el origen. Esta situacion se dara para un valor de laenergıa
E = U(R) = 3kR4
El valor correspondiente del momento angular es simplemente, utilizando la ex-presion calculada para R,
L = 2R3√
mk
El perıodo de este movimiento circular puede calcularse teniendo en cuenta que
L = mR2ω = mR2 2π
T
y el valor calculado para el momento angular. El resultado es
T =
√m
kπ
1
R
• Supongamos ahora que perturbamos ligeramente el movimiento. Alrededor delmınimo todo potencial puede aproximarse por el potencial del oscilador armonico.En efecto, desarrollamos en serie de Taylor en torno a r = R
U(r) = U(R) + U ′(R)(r −R) +1
2U ′′(R)(r −R)2 + · · ·
En este caso, quedandonos con la aproximacion a segundo orden en las derivadasse tiene,
U(r) = 3kR4 +1
224kR2(r −R)2
Para calcular el perıodo de las pequenas oscilaciones alrededor del mınimo, bastaracomparar el termino procedente de la perturbacion con el potencial del osciladorarmonico 1
2mω2
0r2, esto es
24kR2 = mω20
de donde obtenemos para la frecuencia y el perıodo las expresiones
ω0 =√
6ω > ω
T0 =2π√6ω
< T
En consecuencia, la orbita no cierra nunca ya que la relacion entre las frecuenciases irracional. Se completa un perıodo de oscilacion antes de que la partıcula recorrauna circunferencia entera.

100 Capıtulo 3
3) Dado el potencial V (r) = −kr−n, siendo k una constante positiva, demostrarque las orbitas circulares son inestables para n > 2.
Solucion
El potencial efectivo correspondiente a este potencial sera de la forma
U(r) = − k
rn+
L2
2mr2
Tal y como vimos en el problema anterior, las orbitas circulares corresponderana un valor de la energıa tal que E = U(R), siendo R el mınimo del potencial.Calculemos en primer lugar los puntos crıticos del potencial efectivo.
U ′(r) |r=R=kn
Rn+1− L2
mR3= 0
Por lo tanto
Rn−2 =nmk
L2
Para decidir si las orbitas circulares son estables o inestables, es preciso determinarcuando el punto crıtico correspondiente a r = R es un mınimo o un maximo delpotencial efectivo. Para ello calculamos la derivada segunda
U ′′(r) |r=R= −kn(n + 1)
Rn+2+
3L2
mR4=
L2
R4m(2− n)
donde hemos utilizado la expresion calculada anteriormente para R. Si n > 2,se tiene que U ′′(R) < 0. Para estos valores de n, R corresponde a un maximodel potencial efectivo y por lo tanto las orbitas circulares seran inestables. Porel contrario cuando n < 2, R sera un mınimo del potencial efectivo y las orbitascirculares seran estables.

Movimiento de una partıcula en tres dimensiones 101
4) En algunos libros de Fısica elemental se acostumbra a igualar la fuerza gravi-tatoria con la centrıfuga para efectuar ciertos calculos de orbitas planetarias. Ra-zonar que esto solamente es util en el caso de orbitas circulares y aprovechar elrazonamiento para calcular el radio de curvatura en el afelio de una orbita elıpticaen funcion de los parametros habituales.
Solucion
Los vectores velocidad y aceleracion en coordenadas polares planas se escriben enla forma
~r = r~jr + rϕ~jϕ,
~a = (r − rϕ2)~jr + (rϕ + 2rϕ)~jϕ
y la fuerza gravitatoria
~F = − k
r2~jr
Utilizando la segunda ley de Newton ~F = m~a, se tiene
mr −mrϕ2 = − k
r2
ϕ + 2rϕ = 0
• Cuando la orbita es circular v2 = r2ϕ2 y r = 0 con lo cual r = 0 y la expresionanterior se convierte en
−mv2
r= − k
r2
donde el primer termino corresponde a la fuerza centrıfuga. Luego solo en el casode orbitas circulares es posible igualar la fuerza gravitatoria a la fuerza centrıfuga.
• Sin embargo, para una orbita elıptica, el afelio y el perihelio corresponden apuntos de retroceso del potencial, en los cuales r1 = 0 y por lo tanto la velocidady aceleracion en dichos puntos se escriben en la forma
~r1 = r1ϕ1~jϕ1 , =⇒ v1 = r1ϕ1
~r1 = (r1 − r1ϕ12)~jr1
de manera que ~r1 y ~r1 son perpendicularesY las ecuaciones de movimiento son:
mr1 −mr1ϕ21 = − k
r21
ϕ1 = 0

102 Capıtulo 3
Puesto que la aceleracion solo tiene componente normal, podemos definir el radiode curvatura como ρ que verifique
a1 =v2
1
ρ
Utilizando la segunda ley de Newton,
− k
r21
= −mv2
1
ρ
o bien
ρ =mv2
1r21
k
teniendo en cuenta quek = GMsm
r1 = a± c = a(1± ε)
donde a es el semieje mayor de la orbita, c la distancia focal, y Ms la masa delsol, situado en el foco de la elipse. El signo ± indica que se trata del afelio o delperihelio.
Para determinar el valor de v1 utilizamos la expresion para la conservacion dela energıa. En el afelio y en el perihelio sera
E =1
2mv2
1 −GMsm
(a± c)
donde m es la masa del planeta. En terminos del semieje mayor de la orbita a,la energıa se escribe como E = −k
2a, donde k = GMsm. Comparando las dos
expresiones para la energıa, obtenemos la velocidad en el afelio y en el periheliode la orbita
v21 = GMs
a∓ c
a(a± c)
El radio de curvatura en el afelio y en el perihelio de la orbita sera entonces
ρ =1
a(a2 − c2) =
b2
a
En el caso particular en que la orbita es circular, b = a y por lo tanto el radio decurvatura coincide exactamente con el radio de la orbita como era de esperar.

Movimiento de una partıcula en tres dimensiones 103
5) Un satelite artificial de masa m describe una orbita circular de radio R. Enun cierto instante su velocidad se reduce a la mitad y el satelite pasa a una orbitaelıptica. Calcular la energıa, el momento angular y los semiejes de la nueva orbita.
Solucion
Como vimos en el problema anterior, cuando la orbita es circular podemosigualar la fuerza gravitatoria a la fuerza centrıfuga, lo cual nos permitira calcularla velocidad del satelite cuando se encuentra en esa orbita
mv2
R= G
Mm
R2
siendo M la masa del planeta. La velocidad en esta orbita es entonces
v2 = GM
R

104 Capıtulo 3
R
En un cierto instante la velocidad se reduce a la mitad, con lo cual la energıa y elmomento angular en esta nueva situacion seran
E =1
2m
(v
2
)2
−GMm
R= −7
8G
Mm
R,
L = mRv
2=
1
2m√
GMR.
Con estos valores de E y L el satelite empieza a describir una orbita elıptica, cuyossemiejes vendran dados por las longitudes caracterısticas del potencial de Coulomba y b,
a =| k |
2 | E | =1
2GMm
8R
7GMm=
4
7R,
b2 =L2
2m | E | =1
7R2

Movimiento de una partıcula en tres dimensiones 105
6) Se ha observado un cometa cuya distancia mınima al Sol es la mitad del radiode la orbita terrestre (supuesta circular) y cuya velocidad para esa distancia es eldoble de la velocidad orbital de la Tierra. ¿Se podra observar dicho cometa en elfuturo?
Solucion
Por tratarse de fuerzas centrales, la energıa es una constante del movimiento,por lo cual podemos calcular su valor a partir del correspondiente al punto demaxima aproximacion al sol, para el cual el radio es la mitad del de la orbitaterrestre R (supuesta circular) y la velocidad v el doble de la velocidad orbital dela tierra,
E =1
2m(2v)2 −G
Msm
R/2
siendo m la masa del cometa y Ms la del sol.Para determinar la relacion entre R y v, en la aproximacion de orbita circular
para la tierra, se verifica
Mtv2
R= G
MtMs
R2
donde Mt es la masa de la tierra, y en consecuencia despejando v,
v2 = GMs
R
Sustituyendo la expresion para v en la de la energıa del cometa
E =1
2m4G
Ms
R− 2Gm
Ms
R= 0
Teniendo en cuenta que para el potencial de Coulomb, el parametro ε se escribecomo
ε =
√1 +
2EL2
mk2

106 Capıtulo 3
en este caso ε = 1. La orbita sera una parabola y por lo tanto no sera posibleobservar el cometa en el futuro.

Movimiento de una partıcula en tres dimensiones 107
7) Se considera un sistema planetario de ficcion en el que la Estrella-Sol correspon-diente genera un campo conservativo del tipo V = kr3/3, siendo k una constantepositiva. Un planeta de este sistema tiene inicialmente una velocidad ~v0 ortogonala la fuerza central. ¿Para que valor del modulo v0 la orbita del planeta sera unacircunferencia?
Solucion
El potencial efectivo asociado al potencial V (r) es
U(r) =1
3kr3 +
L2
2mr2
El mınimo del potencial efectivo correspondiente a r = R, se determinara derivandola expresion anterior
U ′(r) |r=R= kR2 − L2
mR3= 0
y por lo tanto
R =
(L2
mk
) 15
Para que la orbita sea una circunferencia, la energıa debe ser igual al mınimodel potencial, E = U(R). Ademas por ser una fuerza conservativa la energıa esuna constante del movimiento, con lo cual puede determinarse con su valor en elinstante inicial
E =1
2mv2
0 +1
3kR3
mientras que el mınimo del potencial es
U(R) =1
3kR3 +
L2
2mR2
Igualando las dos expresiones anteriores obtenemos el valor para v0
v20 =
k
mR3
que tendra unicamente direccion angular por tratarse de una orbita circular
~v0 = R
√k
mR~jϕ

108 Capıtulo 3
8) Un cometa se mueve en el campo gravitatorio del Sol con perıodo T . En elperihelio la distancia del Sol al cometa es rp. Hallar la distancia del Sol al afeliode la orbita del cometa si se conoce el perıodo de la Tierra alrededor del Sol y eleje mayor de la orbita de la Tierra.
Solucion
Sean ra y rp las distancias del sol al afelio y al perihelio de la orbita del cometaalrededor del sol, respectivamente. Sea a el semieje mayor de dicha orbita. Severifica
ra = 2a− rp
Utilizando la tercera ley de Kepler del movimiento planetario
T 2 = 4π2 a3
GMs
donde T es el perıodo de la orbita y Ms la masa del sol. La misma expresion sesatisface obviamente para el movimiento de la tierra alrededor del sol con perıodoTt y semieje mayor de la orbita at,
T 2t = 4π2 a3
t
GMs
Dividiendo una expresion entre otra obtenemos
a = at
(T
Tt
)2/3
y por lo tanto la distancia del sol al afelio del cometa sera
ra = 2at
(T
Tt
)2/3
− rp
La tercera Ley de Kepler puede obtenerse facilmente a partir de la conservaciondel momento angular para fuerzas centrales. El elemento diferencial de area quebarre el vector r a lo largo de la orbita es
dA
dt=
1
2r2ϕ =
L
2m
Teniendo en cuenta que el area de la elipse es A = πab, integrando obtenemos elperıodo de la orbita dado por la expresion (6.). Es posible obtener tambien esteresultado utilizando la expresion para el momento angular L = mr2ϕ y la ecuacionpara la orbita, e integrando entre angulos 0 y 2π, es decir
T =mb4
La2
∫ 2π
0
dϕ
(1 + ε cos(ϕ))2

Movimiento de una partıcula en tres dimensiones 109
Otra manera de obtener la expresion para la tercera ley de Kepler es a partir dela integracion de la ecuacion del movimiento
−H =1
2mr2 +
L2
2mr2− k
r
entre los puntos de retroceso r1 y r2, es decir
T = 2
∫ r2
r1
dr√2m
(−H − L2
2mr2 + kr
)

110 Capıtulo 3
9) Estudiar el potencial V = − k2r2 con k > 0.
Solucion
El potencial efectivo asociado al potencial V (r) toma la forma
U(r) =L2
2mr2+ V (r) =
L2 − km
2mr2
Dependiendo del signo de U(r) debemos considerar dos casos por separado a lahora de analizar el potencial: el caso con L2 > km y el caso con L2 < km.
Caso 1) L2 −mk > 0 incluye el caso k = − | k |
En este caso los estados son siempre de difusion y por lo tanto es convenientetomar las condiciones iniciales en el infinito. Suponemos que la partıcula viene delinfinito, con parametro de impacto b, paralela al eje X (ϕ∞ = 0) y con velocidad−v0
~i. Con estas condiciones iniciales, podemos determinar las expresiones para elmomento angular y la energıa,
L = mbv0
E =1
2mv2
0
Existe un unico punto de retroceso ~r1 dado por la condicion E = U(r1) quecorrespondera por tanto a
r21 =
L2 −mk
2mE

Movimiento de una partıcula en tres dimensiones 111
Combinando las expresiones anteriores es posible expresar la energıa, el momentoangular y la velocidad inicial v∞ en terminos del punto de retroceso y del parametrode impacto en la forma
L = b
√mk
b2 − r21
,
E =k
2(b2 − r21)
,
v∞ =
√k
m(b2 − r21)
donde ademas el parametro de impacto b y el punto de retroceso r1 estan rela-cionados mediante la expresion,
b2 =L2
L2 −mkr21
de donde se deduce que b ≥ r1. Una vez expresados el momento angular y laenergıa en terminos de los parametros habituales, procedemos a calcular la orbita.Las ecuaciones del movimiento son
E =1
2mr2 +
L2 −mk
2mr2,
L = mr2ϕ
Para integrarlas es conveniente utilizar el cambio de variable
r(t) =1
p(ϕ)
de forma que
r = − 1
p2ϕp′ = − 1
p2p′
L
mr2= −L
mp′
donde p′ = dpdϕ
. Sustituyendo r en la expresion para la energıa obtenemos
p′2 =2m
L2
(E − L2 −mk
2mp2
)
En terminos del punto de retroceso y del parametro de impacto, la ecuacion difer-encial anterior puede escribirse en la forma,
p′2 =1
b2(1− r2
1p2)

112 Capıtulo 3
Integrando y deshaciendo el cambio, obtenemos
r =r1
sin(
r1ϕb
+ α0
)
La condicion inicial es que ϕ = 0 cuando r tiende a ∞, lo que determina α0 = 0 ypor lo tanto
r =r1
sin(
r1ϕb
)
En el punto de retroceso r = r1, se verifica que sin(
r1ϕ1
b
)= 1, y por lo tanto
r1 =π
2
b
ϕ1
En terminos del angulo ϕ1, la expresion para la orbita es
r =r1
sin(
π2
ϕϕ1
)
donde r1, b y ϕ1 pueden escribirse en la forma
r1 =
√L2 −mk
2mE,
b =
√L2
2mE,
ϕ1 =π
2
√L2
L2 −mk.
A continuacion pasamos a analizar la orbita.Asıntotas
De la ecuacion 6., es facil ver que r tiende a∞ cuando ϕ = 0 y cuando ϕ = 2ϕ1,y por tanto las asıntotas corresponderan a estos dos valores del angulo. Veamoscuales son las dos asıntotas, de entrada y de salida, correspondientes a los valoresde ϕ anteriores.i) Asıntota de entrada
Puesto que ϕ = 0, la asıntota sera y = c donde c se determina como
c = limϕ→0
y = limϕ→0
r sin ϕ = limϕ→0
r1 sin ϕ
sin(
π2
ϕϕ1
) =2
πr1ϕ1 = b
luego como era de esperar por las condiciones iniciales, la asıntota de entrada esy = b.ii) Asıntota de salida
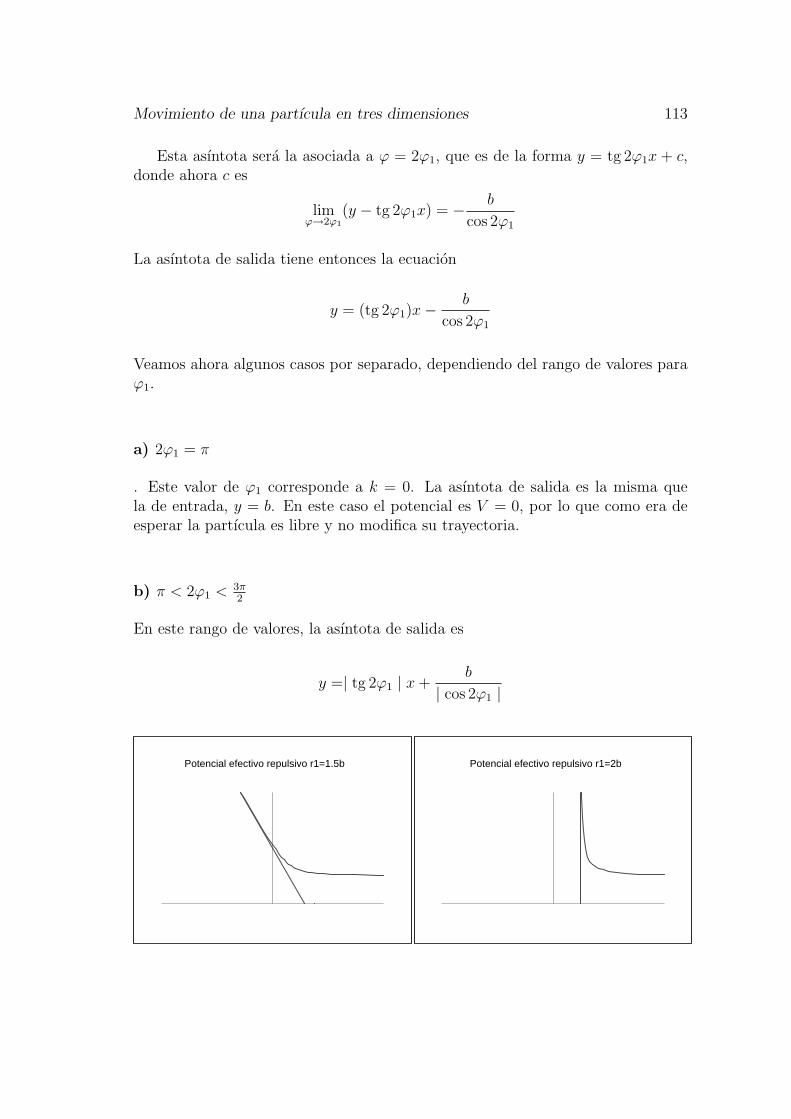
Movimiento de una partıcula en tres dimensiones 113
Esta asıntota sera la asociada a ϕ = 2ϕ1, que es de la forma y = tg 2ϕ1x + c,donde ahora c es
limϕ→2ϕ1
(y − tg 2ϕ1x) = − b
cos 2ϕ1
La asıntota de salida tiene entonces la ecuacion
y = (tg 2ϕ1)x− b
cos 2ϕ1
Veamos ahora algunos casos por separado, dependiendo del rango de valores paraϕ1.
a) 2ϕ1 = π
. Este valor de ϕ1 corresponde a k = 0. La asıntota de salida es la misma quela de entrada, y = b. En este caso el potencial es V = 0, por lo que como era deesperar la partıcula es libre y no modifica su trayectoria.
b) π < 2ϕ1 < 3π2
En este rango de valores, la asıntota de salida es
y =| tg 2ϕ1 | x +b
| cos 2ϕ1 |
Potencial efectivo repulsivo r1=1.5b Potencial efectivo repulsivo r1=2b
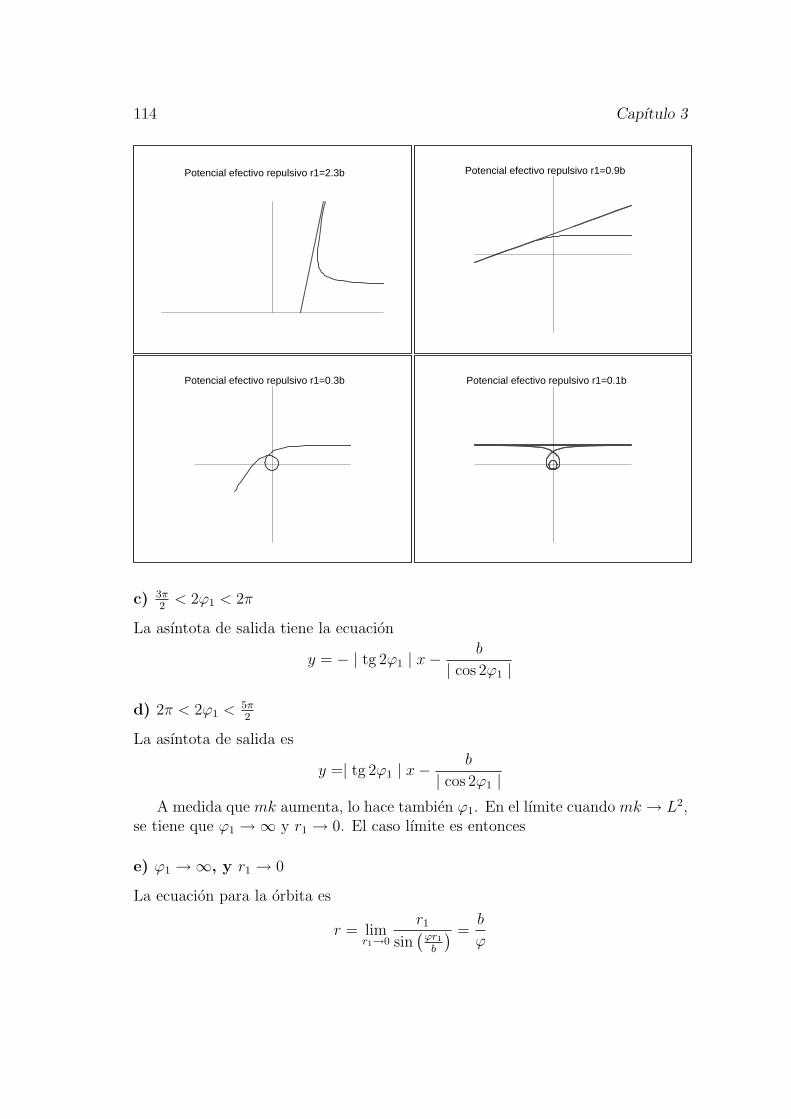
114 Capıtulo 3
Potencial efectivo repulsivo r1=2.3b Potencial efectivo repulsivo r1=0.9b
Potencial efectivo repulsivo r1=0.3b Potencial efectivo repulsivo r1=0.1b
c) 3π2
< 2ϕ1 < 2π
La asıntota de salida tiene la ecuacion
y = − | tg 2ϕ1 | x− b
| cos 2ϕ1 |
d) 2π < 2ϕ1 < 5π2
La asıntota de salida es
y =| tg 2ϕ1 | x− b
| cos 2ϕ1 |A medida que mk aumenta, lo hace tambien ϕ1. En el lımite cuando mk → L2,
se tiene que ϕ1 →∞ y r1 → 0. El caso lımite es entonces
e) ϕ1 →∞, y r1 → 0
La ecuacion para la orbita es
r = limr1→0
r1
sin(
ϕr1
b
) =b
ϕ

Movimiento de una partıcula en tres dimensiones 115
en cuyo caso la orbita es la espiral hiperbolica de ecuacion r = bϕ
y no hay asıntotade salida.
Caso 2)L2 < mk
En este caso podemos escribir el potencial efectivo en la forma,
U(r) = −mk − L2
2mr2
y por tanto habremos de considerar dos casos independientes, dependiendo de quela energıa sea positiva o negativa.
2a) E > 0
potencial efectivo para L2–2mk<0; E>0
Debido a que el potencial es negativo, los estados son de difusion pero no haypuntos de retroceso. Conviene, al igual que en el caso 1, tomar las condicionesiniciales en el infinito
L = mbv∞
E =1
2mv2
∞
Con el cambio de coordenadas r(t) = 1p(ϕ)
, la ecuacion diferencial para determinarla orbita es
p′2 =2m
L2E +
mk − L2
L2p2
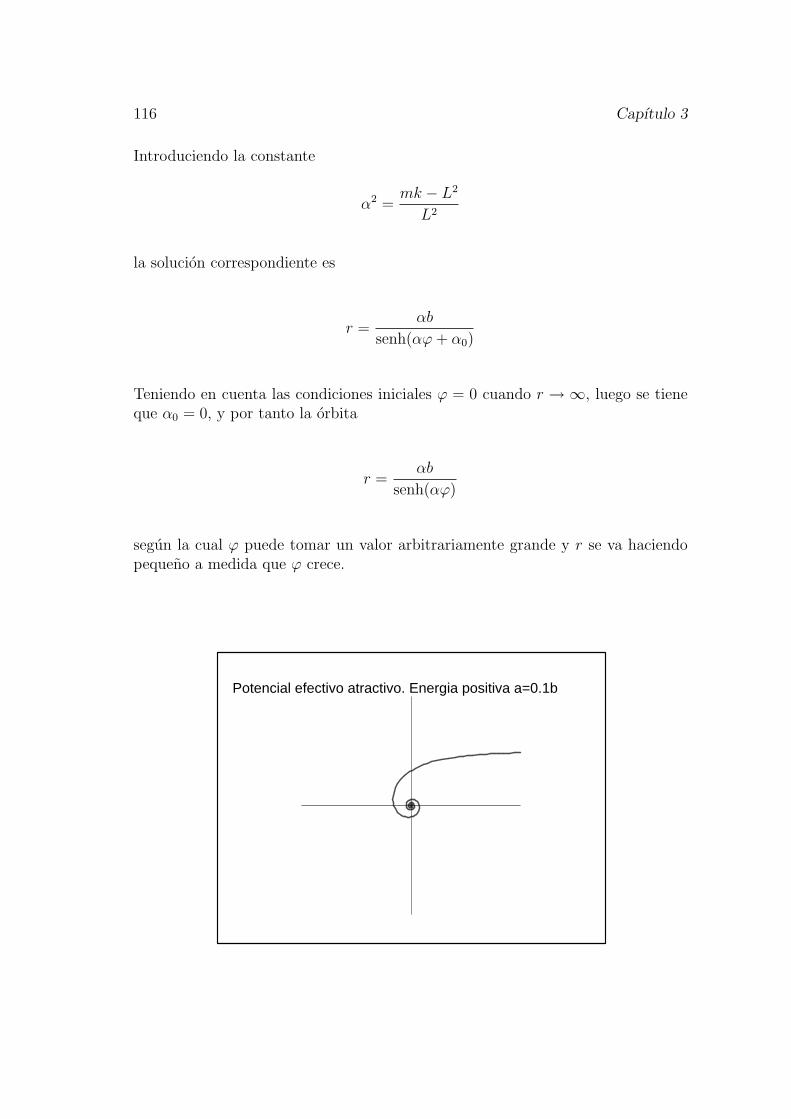
116 Capıtulo 3
Introduciendo la constante
α2 =mk − L2
L2
la solucion correspondiente es
r =αb
senh(αϕ + α0)
Teniendo en cuenta las condiciones iniciales ϕ = 0 cuando r → ∞, luego se tieneque α0 = 0, y por tanto la orbita
r =αb
senh(αϕ)
segun la cual ϕ puede tomar un valor arbitrariamente grande y r se va haciendopequeno a medida que ϕ crece.
Potencial efectivo atractivo. Energia positiva a=0.1b

Movimiento de una partıcula en tres dimensiones 117
2b) E < 0
potencial efectivo para L2–2mk<0; E<0
Teniendo en cuenta que siempre debe verificarse que E > U(r), el estado esligado y la partıcula esta confinada en el tramo 0 < r < r1, siendo r1 el punto deretroceso que satisface la condicion E = U(r1). Debido a que E < 0, se verificaademas que E = − | E | y por tanto el punto de retroceso sera
r21 =
mk − L2
2m | E |Utilizando el mismo cambio de coordenadas a la variable p que en el apartadoanterior, se tiene
p′2 =2m | E |
L2(−1 + r2
1p2)
Introduciendo ahora la constante
β2 =L2
2m | E |La ecuacion para la orbita es
r =r1
cosh( r1ϕβ
+ α0)
Imponiendo como condicion inicial que ϕ = 0 cuando r = r1, se tiene de nuevoque α0 = 0 y entonces
r =r1
cosh( r1ϕβ
)
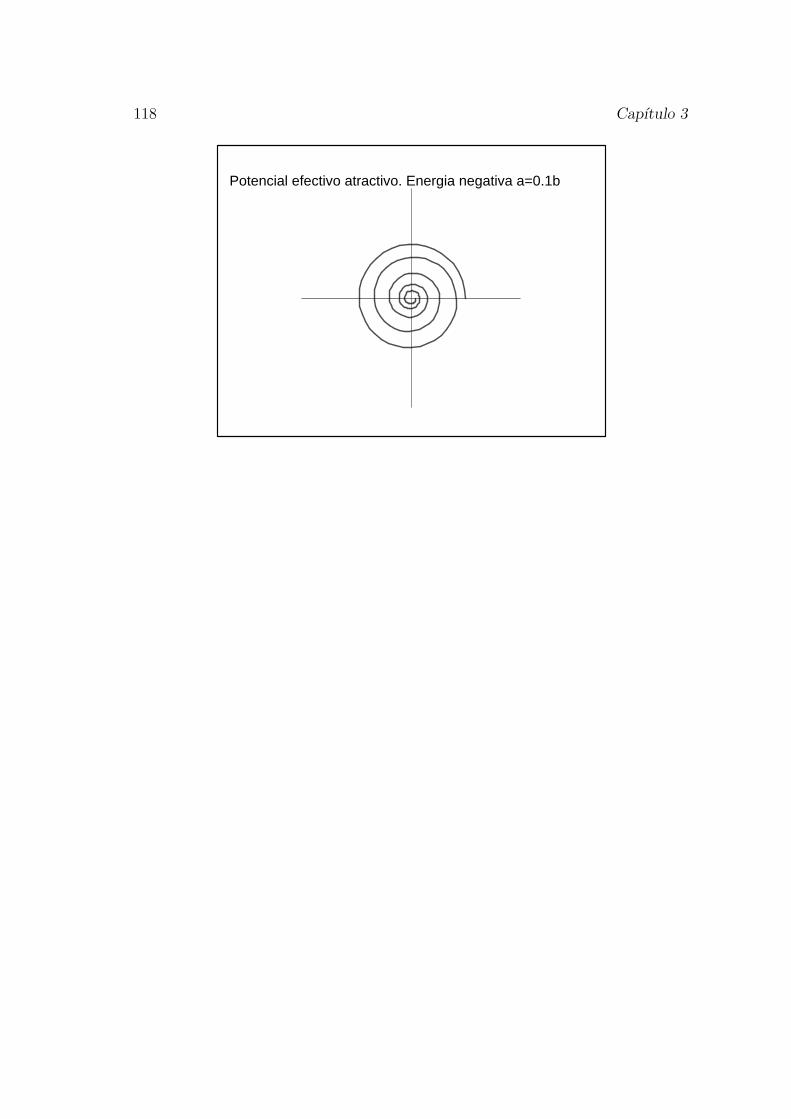
118 Capıtulo 3
Potencial efectivo atractivo. Energia negativa a=0.1b

Movimiento de una partıcula en tres dimensiones 119
10) Sea el vector
~M =1
m~L× ~p + k
~r
r
Demostrar que es una constante para el potencial V (r) = −kr. Utilizarlo para
calcular la trayectoria.
Solucion
Para dempostrar que el vector ~M es una constante para este potencial calculamossu derivada temporal
d ~M
dt= m(~r × ~r)× ~r + m(~r × ~r)× ~r + k
~r
r− k
~r
r2r
En coordenadas polares planas, los vectores ~r, ~r y ~r se escriben en la forma
~r = r~jr,
~r = r~jr + rϕ~jϕ,
~r = (r − rϕ2)~jr + (rϕ + 2rϕ)~jϕ
Por otra parte, ϕ y su derivada se escriben en terminos del momento angular como
ϕ =L
mr2,
ϕ = − 2L
mr3r
y por lo tanto
~r = r~jr,
~r = r~jr +L
mr~jϕ,
~r =
(r − L2
m2r3
)~jr
A partir de las expresiones anteriores, se tiene que
d ~M
dt= L
(r − L2
m2r3+
k
mr2
)~jϕ
Teniendo en cuenta que la energıa para este potencial se escribe como
E =1
2mr2 +
L2
2mr2− k
r

120 Capıtulo 3
y que es una constante del movimiento y por tanto
r − L2
m2r3+
k
mr2= 0
se satisface tambien que ~M es una constante del movimiento, es decir
d ~M
dt= 0
Por su parte, el vector ~M puede escribirse en coordenadas polares como
~M =
(k − L2
mr
)~jr + Lr~jϕ
y en coordenadas cartesianas como
~M =
[(k − L2
mr
)cos θ − Lr sin θ
]~i +
[(k − L2
mr
)sin θ + Lr cos θ
]~j
Si consideramos la situacion de estados de difusion, imponemos como condicionesiniciales que para θ = 0, r = ∞ y r = v∞, el vector ~M por ser un vector constante,podra escribirse como
~M = k~i + Lv∞~j
Comparando las expresiones anteriores tenemos en componentes que(
k − L2
mr
)cos θ − Lr sin θ = k,
(k − L2
mr
)sin θ + Lr cos θ = Lv∞
Entre las dos ecuaciones anteriores es posible eliminar r, de manera que utilizandolas expresiones para la energıa y el momento angular determinadas a partir de susvalores en el instante inicial, es decir
E =1
2mv2
∞,
L = mbv∞
podemos escribir (k − 2Eb2
r
)= k cos θ + 2Eb sin θ
La expresion anterior puede escribirse en la forma
1
r=
k
2Eb2
(1− 1
cos αcos(θ − α)
)

Movimiento de una partıcula en tres dimensiones 121
donde hemos introducido el angulo α definido como
tg α =2Eb
k
De la definicion para α obtenemos las siguientes relaciones
cos α = −1
ε,
2Eb
k=
√ε2 − 1
con lo cual la expresion para la orbita es
r =b√
ε2 − 1
1 + ε cos(θ − α)=
r1(ε + 1)
1 + ε cos(θ − α)
Las asıntotas de entrada y salida corresponden precisamente a angulos θ = 0 yθ = 2α, y el punto de maximo acercamiento se localiza para un valor del anguloθ = α y corresponde a
rmin = b
√ε− 1
ε + 1= r1
Analicemos ahora el caso particular en el cual las orbitas son cerradas. Las condi-ciones iniciales vienen dadas por θ = 0 y r = r1,r1 = 0. Podemos calcular elvector ~M a partir de su valor en el instante inicial por ser un vector constante delmovimiento, esto es
~M =
(k − L2
mr1
)~i
Comparando con la expresion general para ~M en cualquier instante de tiempo,(
k − L2
mr
)cos θ − Lr sin θ = k − L2
mr1
,
(k − L2
mr
)sin θ + Lr cos θ = 0
Es posible tambien en este caso eliminar r entre ellas de manera que
1
r=
mk
L2
[1 +
(L2
kmr1
− 1
)cos θ
]
Teniendo en cuenta que
ε =L2
mkr1
− 1
podemos escribir la expresion para la orbita en terminos de ε y r1 como
r =r1(ε + 1)
1 + ε cos θ

122 Capıtulo 3
11) Una masa m se une mediante un hilo flexible ligero de longitud a a un resortecuya longitud es tambien a y su constante de recuperacion k. El otro extremo delresorte esta en un punto O permitiendo el giro del hilo alrededor de ese punto.Demostrar que la ecuacion radial del movimiento de la masa para r > 2a es:
1
2mr2 +
L2
2mr2+
1
2k(r − 2a)2 = E
donde L es el momento angular y E la energıa total. ¿Cual es la ecuacion corre-spondiente para r < 2a?
Se tira de la masa hasta llevarla a una distancia 3a de O y se le da una velocidad ~v perpendicular al hilo.
a) ¿Para que valor de v sera circular la trayectoria de la masa?
b) ¿Cual es el valor mınimo vm de v que mantendra tenso el hilo en todomovimiento subsiguiente? Ayuda: El hilo se mantiene tenso siempre que la dis-tancia al centro sea mayor que 2a.
c) Verificar que cuando v sea menor que vm la distancia rm de maxima aprox-imacion vendra dada por:
rm = 3a
[1 +
ka2
mv2
]−1/2
Solucion
La energıa y el momento angular pueden calcularse a partir de las condicionesiniciales del problema, es decir, se tira de la masa hasta una distancia 3a de O yse le da una velocidad ~v perpendicular al hilo de forma que r2 = 3a es un puntode retroceso
E =1
2mv2 +
1
2k(3a− 2a)2 =
1
2mv2 +
1
2ka2,
L = 3mav
En cuanto al potencial efectivo sera de la forma
U(r) =L2
2mr2+
1
2k(r − 2a)2 si r > 2a
U(r) =L2
2mr2si r < 2a
• a) El mınimo del potencial efectivo se determinara derivando U(r)

Movimiento de una partıcula en tres dimensiones 123
r1=r2=R=2a
0 2 4r
U ′(r) |r=R= − L2
mR3+ k(R− 2a) = 0
Para que R = 3a sea un mınimo del potencial con el momento angular dado porla condicion inicial se debera cumplir
U ′(3a) = −9m2a2v2
27ma3+ ka = 0
y por lo tanto el valor de v para que la trayectoria de la masa sea circular es
v =
√3k
ma
• b) Se trata de que la energıa sea tal que r = 2a sea el punto de maximoacercamiento. Es decir E = U(r = 2a)

124 Capıtulo 3
r1=2a, r2=3a
0 2 4r
E =L2
2m4a2+
1
2k(2a− 2a)2 =
L2
2m4a2
y por lo tanto
9m2a2v2m
8ma2=
1
2mv2
m +1
2ka2
Luego la velocidad mınima es
vm = 2a
√k
5m
• c) En este caso el punto de maximo acercamiento es menor que 2a. En conse-cuencia viene determinado por
E =L2
2mr21

Movimiento de una partıcula en tres dimensiones 125
r1<a,
2 4r
de manera que
r1 =L√2mE
=3mav√
m2v2 + mka2=
3a√1 + ka2
mv2

126 Capıtulo 3
12) Sea el potencial V (r) = −kr
+ k′2r2 . Demostrar que las orbitas son elipses que
precesan.
Solucion
El potencial efectivo es
U(r) = −k
r+
k′m + L2
2mr2
que tiende a cero cuando r tiende a infinito y a infinito cuando r tiende a cero.Presenta ademas un mınimo para
r =L2 + mk′
2mk
Para tener orbitas cerradas es necesario considerar el caso en que E < 0. Intro-ducimos H = −E al igual que hicimos en el potencial de Coulomb. Tendremosen esta situacion estados ligados en los cuales la partıcula se movera entre dospuntos de retroceso que calcularemos a partir de la condicion r = 0, y por tanto−H = U(r). Estos puntos son
r =k
2H
[1±
√1− 4a2H2
k2
]
donde hemos introducido la constante
a2 =L2 + mk′
2mH
En terminos de
ε2 = 1− 4a2H2
k2
los puntos de retroceso r1 y r2 pueden escribirse como
r1 = a
√1− ε
1 + ε,
r2 = a
√1 + ε
1− ε
La ecuacion del movimiento sera
−H =1
2mr2 − k
r+ H
a2
r2
Para su integracion hacemos el cambio de variable
r(t) =1
p(ϕ), → r = −L
mp′

Movimiento de una partıcula en tres dimensiones 127
e introducimos una nueva constante α
α2 =L2 + mk′
L2=
2mH
L2a2
La ecuacion diferencial correspondiente es, en terminos de los parametros a, α y ε
p′2 =α2
a2
ε2
1− ε2
[1−
(a√
1− ε2
εp− 1
ε
)2]
Hacemos de nuevo otro cambio de variable
q =a√
1− ε2
εp− 1
ε
con el cual la ecuacion se escribe
q′2 = α2(1− q2)
cuya integracion daq = sin α(ϕ + α0)
Deshaciendo cambios la ecuacion resultante para la orbita es
r =a√
1− ε2
1 + ε sin α(ϕ + α0)
El angulo α0 puede determinarse a partir de las condiciones iniciales, teniendo encuenta que si orientamos la orbita de manera que para ϕ = 0 r = r1, obtenemosque
αα0 =π
2La ecuacion para la orbita, escrita ya en terminos de r1 es
r =r1(1 + ε)
1 + ε cos(αϕ)
n=3/2 n=5/2

128 Capıtulo 3
Es interesante notar que, unicamente cuando α es un numero impar, tendremosque para ϕ = π r = r2. Las orbitas son por tanto elipses que precesan. Elmovimiento es el mismo que el correspondiente al potencial de Coulomb solo peroexpresado en terminos de un sistema de coordenadas que precesa en torno al centrode fuerzas.
n irracional

Movimiento de una partıcula en tres dimensiones 129
13) Determinar la seccion eficaz para la “caıda” de partıculas en el centro de uncampo de fuerzas F = − k
r3 con k > 0.
Solucion
El potencial efectivo es
U(r) =L2 −mk
2mr2
Cuando L2 > mk el potencial efectivo es positivo y por tanto repulsivo. Por elcontrario cuando L2 < mk el potencial es atractivo. Por lo tanto para que sede la situacion de “caıda” de partıculas al centro de fuerzas, debera cumplirse lacondicion
L2 ≤ mk
El momento angular puede calcularse a partir de su valor en el instante inicial
L = mbv∞
con lo cual la condicion sobre el parametro de impacto b es
b2 ≤ k
mv2∞
Luego el parametro de impacto solo puede tomar valores comprendidos entre unvalor mınimo bm = 0 y un valor maximo bM dado por
b2M =
k
mv2∞
La seccion eficaz sera por tanto
σ =
∫bdbdϕ =
∫ 2π
0
dϕ
[b2
2
]bM
bm
= πk
mv∞
Es decir, la seccion eficaz es exactamente el area de una esfera de radio bM , quecorresponde al area que atraviesan las partıculas que se dispersan.

130 Capıtulo 3
14) Determinar la seccion eficaz para la “caıda” de partıculas en el centro de uncampo V = − k
rn con k > 0 y n > 2..
Solucion
El potencial efectivo asociado a este potencial es
U(r) = − k
rn+
L2
2mr2=
L2rn − 2mr2
2mrn+2
Este potencial tiende a menos infinito en el origen y a cero en el infinito. Presentaun maximo en el punto
rm =
(nmk
L2
) 1n−2
Para que las partıculas puedan caer en el centro de fuerzas, debe cumplirse ladesigualdad
E ≥ Um
siendo Um el valor maximo del potencial, esto es
Um = k
(L2
nmk
) nn−2
(n− 2
2
)
Consideremos ahora las condiciones iniciales en el infinito para calcular la energıay el momento angular
E =1
2mv2
0
L = mbv0
La condicion que tenıamos para la energıa implica la desigualdad
k
(n− 2
2
)(mv2
0b2
nk
) nn−2
(n− 2
2
)≤ 1
2mv2
0
(mv2
0b2
nk
) nn−2
≤ 1
n− 2
mv20
k
con lo cual, despejando el parametro de impacto
b2 ≤ n
(1
n− 2
)n−2n
(k
mv20
) 2n
Luego el parametro de impacto puede tomar valores comprendidos entre 0 ≤ b ≤bm, donde
bm = n
(1
n− 2
)n−2n
(k
mv20
) 2n

Movimiento de una partıcula en tres dimensiones 131
La seccion eficaz puede calcularse ya facilmente mediante una integracion
σ =
∫ bm
0
bdbdϕ = πn
(1
n− 2
)n−2n
(k
mv20
) 2n
o bien en terminos de la energıa como
σ = πn
(1
n− 2
)n−2n
(k
2E
) 2n

132 Capıtulo 3
15) Analizar el proceso de scattering producido por una fuerza repulsiva centralde la forma F = kr−3. Mostrar que la seccion eficaz diferencial viene dada por laexpresion
dσ
dΩ=
k
2πE sin(πx)
1− x
x2(2− x)2(6.1)
siendo E la energıa y x = Θ/π.
Solucion
El potencial efectivo correspondiente a la fuerza del enunciado es
U(r) =L2 + mk
2mr2
analogo al considerado en el primer caso del problema 8. Los estados son dedifusion con un punto de retroceso dado por la expresion
r1 =
(L2 + mk
2mE
)1/2
La energıa y el momento angular pueden escribirse en terminos de r1 y del parametrode impacto como
E =k
2(r21 − b2)
L = b
√mk
r21 − b2
La expresion para la orbita es identica a la del problema 8
r =r1
sin(
r1ϕb
)
Cuando la partıcula se encuentra en el punto de retroceso r = r1 se tiene para ϕel valor
ϕ1 =π
2
b
r1
=π
2
√L2
L2 + mk
De la ecuacion de la orbita se deduce que las asintotas de entrada y de salidacorresponden respectivamente a angulos ϕe = 0 y ϕs = πb
r1,
ϕs = π
√L2
L2 + mk=
√2mEb2
2mEb2 + km

Movimiento de una partıcula en tres dimensiones 133
de donde puede obtenerse la expresion para el parametro de impacto en terminosde ϕs
b =
√k
2E
ϕs√π2 − ϕ2
s
Teniendo en cuenta que el angulo de dispersion es Θ = π − ϕs
b =
√k
2E
√(π −Θ)2
Θ(2π −Θ)
La seccion eficaz diferencial es
dσ
dΩ=
b
sin Θ
db
dΘ
donde en este casodb
dΘ=
√k
2E
π2
[Θ(2π −Θ)]3/2
Sustituyendo todo en la expresion para la seccion eficaz diferencial obtenemos
dσ
dΩ=
kπ2
2E sin Θ
π −Θ
Θ2(2π −Θ)2
o bien en terminos de x, teniendo en cuenta que Θ = πx,
dσ
dΩ=
k
2πE sin(πx)
1− x
x2(2− x)2

134 Capıtulo 3
16) Hallar la seccion eficaz de Rutherford exacta y en la aproximacion de angulospequenos y comprobar que en ese lımite coinciden.
Solucion
Vimos en teorıa que la seccion eficaz diferencial exacta de Rutherford era
dσ
dΩ=
1
4
(k
mv20
)21
sin4(Θ/2)
Por lo tanto en la aproximacion de angulos pequenos podemos aproximar en laexpresion anterior el seno por el angulo y tendremos entonces
dσ
dΩ=
(2k
mv20Θ
2
)2
Veamos ahora que sucede cuando calculamos la seccion eficaz en la aproximacionde angulos pequenos sin necesidad de conocer a priori el angulo de dispersion. Enesta aproximacion
sin Θ =p′yp′
siendo p′ el momento lineal final de la partıcula y p′y el momento lineal final en ladireccion y. Si el angulo es pequeno podemos aproximar
p′ ≈ p′x ≈ p = mv0
debido a que el momento lineal en la direccion x practicamente se conserva. En ladireccion y
p′y =
∫ ∞
−∞Fydt
con lo cual
sinΘ =
∫∞−∞ Fydt
mv0
Las fuerzas consideradas son fuerzas centrales conservativas, luego entonces
Fy = −∂V
∂y= −∂V
∂r
∂r
∂y= −∂V
∂r
y
r
y por lo tanto
sin Θ =− ∫∞
∞∂V∂r
yrdt
mv0
En la aproximacion de angulos pequenos podemos considerar la trayectoria de lapartıcula como una linea recta de ecuacion
y = b, x = v0t

Movimiento de una partıcula en tres dimensiones 135
y por tantodx = v0dt
Utilizando las expresiones anteriores tenemos para el angulo de dispersion en estaaproximacion
sin Θ = − 2
mv20
∫ ∞
b
∂V
∂r
b
r
r√r2 − b2
dr
donde hemos utilizado que
dx =∂x
∂rdr =
r
xdr =
r√r2 − y2
dr =r√
r2 − b2dr
Por lo tanto
sin Θ ≈ Θ = − 2b
mv20
∫ ∞
b
∂V
∂r
dr√r2 − b2
La integral se ha multiplicado por dos para tener en cuenta la contribucion de las xpositivas y negativas. La expresion anterior representa el angulo de dispersion parauna partıcula sometida a un potencial V en terminos del parametro de impactoen la aproximacion de angulos pequenos.
Para el potencial de Coulomb V = k/r la integracion anterior proporciona
Θ =2k
mv20b
y por tanto el parametro de impacto
b =2k
mv20Θ
La seccion eficaz diferencial sera por tanto
dσ
dΩ=
b
Θ
db
dΘ=
(2k
mv20Θ
2
)2
que coincide con el resultado que obteniamos calculando primero la seccion eficazexacta y considerando despues el lımite de angulos pequenos.
136 Capıtulo 3

Capıtulo 4 .
Mecanica de Lagrange y Hamilton
1. Calculo de variaciones
Para dar una formulacion general de la dinamica es necesario emplear el conceptomatematico de funcional que describiremos sin demasiado detalle matematico.
Comencemos con un ejemplo: Supongamos que queremos determinar la curvay = y(x) en el plano X − Y que conecta dos puntos (x1, y1), (x2, y2) y a lo largode la cual la distancia es mınima. La distancia entre dos puntos sera
S =
∫ 2
1
√1 + y′2 dx (1.1)
La cantidad S es un numero que se asigna a cada una de las posibles funcionesy(x). No es por tanto una funcion sino una funcional S[y] que asigna a cadafuncion y(x) un numero real.
1..1 Funcionales integrales
Nos ocuparemos aquı de las funcionales de la siguiente forma
A[q, q] =
∫ t2
t1
F (q, q, t)dt (1.2)
A asigna un numero a cada funcion q(t) definida en un intervalo [t1, t2].
1..2 Principio variacional
La gran semejanza que las funcionales tienen con las funciones sugiere inmediata-mente la idea de extender a aquellas el calculo de maximos y mınimos o, mas gen-eralmente, de puntos estacionarios. De ello se ocupa una rama de las matematicasconocida como calculo de variaciones.
137

138 Capıtulo 4
Diremos que una funcion q(t) sufre una variacion δq si cambia a q = q+δq. Noslimitaremos a variaciones que se anulen en los extremos del intervalo de integracion.Es decir
δq(t1) = δq(t2) = 0 (1.3)
q y q son por tanto trayectorias proximas que conectan los puntos (t1, q(t1)) y(t2, q(t2)).
La variacion de q induce una variacion en q de forma que
δq =d
dtδq (1.4)
Es pues natural definir la variacion de la funcional A como:
δA =
∫ t2
t1
[F (q + δq, q + δq, t)− F (q, q, t)]dt (1.5)
y por tanto
δA =
∫ t2
t1
[∂F
∂qδq +
∂F
∂qδq
]dt (1.6)
Teniendo en cuenta (1.4), podemos hacer la integracion por partes siguiente
∫ t2
t1
∂F
∂qδqdt =
∫ t2
t1
∂F
∂q
d(δq)
dtdt =
∂F
∂qδq |t2t1 −
∫ t2
t1
(d
dt
∂F
∂q
)δqdt
Utilizando (1.3) ∫ t2
t1
∂F
∂qδqdt = −
∫ t2
t1
(d
dt
∂F
∂q
)δqdt (1.7)
Substituyendo en (1.6)
δA =
∫ t2
t1
[∂F
∂q−
(d
dt
∂F
∂q
)]δqdt (1.8)
1..3 Ecuaciones de Euler-Lagrange
Para que A sea extremal y por tanto δA = 0 para todas las variaciones δq esnecesario que se anule el integrando y por tanto
∂F
∂q−
(d
dt
∂F
∂q
)(1.9)
que se conoce como ecuacion de Euler-Lagrange. Se trata de una ecuacion diferen-cial de segundo orden en la que q es la variable dependiente y t la independiente.La solucion general dependera de dos constantes arbitrarias que se fijan de modoque q(t1) = q1 y q(t2) = q2.

Mecanica de Lagrange y Hamilton 139
En general utilizaremos funcionales de varios argumentos qj, qj. La condicionde punto estacionario es entonces:
∂F
∂qj
−(
d
dt
∂F
∂qj
)j = 1, 2....n (1.10)
es decir, un conjunto de n ecuaciones diferenciales de segundo orden
ejemplo
Volvamos, por ejemplo, al caso de la distancia entre dos puntos, que tal comovimos en (1.1) es:
S =
∫ t2
t1
√1 + y′2dx
por tanto las ecuaciones de uker Lagrange son:
∂F
∂q−
(d
dx
∂F
∂q
)
dondeF =
√1 + y′2
de forma que
d
dx
(y′√
1 + y′2
)= 0
y por tantoy′√
1 + y′2= cte
es deciry′ = a
de forma quey = ax + b
la distancia mas corta entre dos puntos corresponde a unirlos por una recta
2. Formulacion lagrangiana para sistemas poten-
ciales
2..1 Coordenadas generalizadas
Dado un sistema de N partıculas, sus posiciones quedaran determinadas por 3Ncoordenadas
~ri = (xi, yi, zi) (2.1)

140 Capıtulo 4
i : 1...N (2.2)
Si el sistema tiene n grados de libertad bastaran n ≤ 3N coordenadas gen-eralizadas qj para describirlo.
~ri = ~ri(q1, q2....qn, t) (2.3)
El sistema se dice natural si la relacion anterior no depende explıcitamente deltiempo.
La determinacion de las n coordenadas generalizadas en un instante t se de-nomina configuracion del sistema
2..2 Principio de Hamilton
A todo sistema de n grados de libertad con coordenadas generalizadas q1...qn, lecorresponde una funcion U(qi, qi, t) llamada potencial que describe las interac-ciones y caracteriza y determina el movimiento de forma que cuando el sistemava desde la configuracion qj(t1) = q
(1)j hasta qj(t2) = q
(2)j , lo hace de forma que
minimiza la llamada integral de accion
S =
∫ t2
t1
[T (qj qj, t)− U(qj qj, t)] dt (2.4)
donde T es la energıa cinetica del sistema.
2..3 Funcion de Lagrange
Definiendo el lagrangiano como
L(qj qj, t) = T (qj, qj, t)− U(qj, qj, t) (2.5)
se puede escribir la integral de accion como
S =
∫ t2
t1
L(qi, qj, t)dt (2.6)
Si L no depende explıcitamente del tiempo, es decir, si ∂L∂t
= 0 se dice que elsistema es autonomo. Notese que todo sistema natural es autonomo pero no todosistema autonomo es natural.
2..4 Ecuaciones del movimiento
y por tanto, el principio de Hamilton requiere que:
∂L
∂qi
−(
d
dt
∂L
∂qi
)i = 1, 2....n (2.7)
que son, por tanto, las ecuaciones del movimiento del sistema. En el contexto dela mecanica se suelen denominar simplemente como ecuaciones de Lagrange

Mecanica de Lagrange y Hamilton 141
2..5 Terminos de la energıa cinetica
Derivando (2.3)
~ ir =∂~ri
∂t+
n∑j=1
qj∂~ri
∂qj
(2.8)
de forma que la energıa cinetica del sistema sera:
T =N∑
i=1
1
2mi~ ir
2
=1
2
n∑
j,k=1
qj qk
N∑i=1
mi∂~ri
∂qj
∂~ri
∂qk
+n∑
j=1
qj
N∑i=1
mi∂~ri
∂t
∂~ri
∂qj
+1
2
N∑i=1
mi(∂~ri
∂t)2 (2.9)
Si definimos las siguientes cantidades:
Ajk =1
2
N∑i=1
mi∂~ri
∂qj
∂~ri
∂qk
Bj =N∑
i=1
mi∂~ri
∂t
∂~ri
∂qj
C =1
2
N∑i=1
mi(∂~ri
∂t)2 (2.10)
entonces
T = T0 + T1 + T2 (2.11)
donde los distintos terminos son:• termino independiente de las velocidades
T0 = C (2.12)
• termino lineal en las velocidades
T1 =n∑
j=1
Bj qj (2.13)

142 Capıtulo 4
• termino cuadratico en las velocidades
T2 =n∑
j,k=1
qj qkAjk (2.14)
Solo cuando el sistema es natural, ∂~ri
∂t= 0, podemos escribir T = T2.
2..6 Potencial: Fuerzas generalizadas
Supondremos por simplicidad y salvo mencion explıcita en contra que U solo de-pende de las coordenadas y quiza del tiempo.
U = U(qj, t)
Generalizando la nocion habitual, se definen las fuerzas como
Fj =∂L
∂qj
=∂T
∂qj
+∂(−U)
∂qj
(2.15)
• Fuerzas potenciales: −∂(U)∂qj
corresponde a las fuerzas derivadas del potencial
• Fuerzas de ligadura: −∂(U)∂qj
corresponde a las fuerzas derivadas de las ligaduras
• ejemplo: Partıcula deslizandose sobre una parabola y = ax2.
Si tomamos y como variable generalizada, la ligadura es:
x =
√y
a

Mecanica de Lagrange y Hamilton 143
x =1
2
√1
ayy
y por tanto
L =1
2my2
(1 +
1
4ay
)−mgy
de manera que las ecuaciones del movimiento son
−mg − my2
8ay2=
d
dt
(my
(1 +
1
4ay
))
donde −mg es la fuerza de la gravedad y −my2
8ay2 la fuerza de ligadura que actuasobre la coordenada y.
2..7 Momentos generalizados
Dado un sistema con n grados de libertad y un lagrangiano dado por (2.5), defini-mos los momentos generalizados conjugados de las variables generalizadas como
pi =∂L
∂qi
(2.16)
Si una de las coordenadas qk no aparece explıcitamente en el lagrangiano se diceque es cıclica, las ecuaciones de Lagrange implican que el momento conjugado pk
es una constante del movimiento.En el ejemplo anterir el momento conjugado de la coordenada y es:
py = my
(1 +
1
4ay
)
3. Sistemas con ligaduras
Los sistemas de partıculas estan, en general, sujetos a tres tipos de condicionesque determinan su movimiento en el espacio y en el tiempo. Hasta ahora hemosconsiderado solamente dos tipos de estas condiciones:
• Las condiciones dinamicas expresadas mediante las fuerzas que actuan so-bre el sistema mediante las ecuaciones del movimiento
• Las condiciones iniciales expresadas habitualmente por los valores inicialesde la posicion y la velocidad y/o por los valores de ciertas cantidades dinamicasconservadas.
Las leyes de Newton estan perfectamente disenadas para investigar el compor-tamiento de sistemas sujetos a los dos tipos de condiciones anteriores. La situaciones completamente distinta cuando el sistema esta sujeto a ligaduras.

144 Capıtulo 4
• Las condiciones geometricas o ligaduras aparecen cuando las coordenadasestan sujetas a restricciones independientes de las fuerzas actuantes (por ejemplopartıculas obligadas a moverse sobre una curva). Aparecen asi fuerzas llamadasfuerzas de ligadura. Si tales fuerzas fueran conocidas, bastarıa sumarlas a lasfuerzas del sistema para determinar su comportamiento. Sin embargo lo masfrecuente es que conozcamos las ligaduras pero no las fuerzas resultantes. Elprocedimiento de Lagrange se adapta perfectamente a estos casos.
Supongamos que el sistema tiene n grados de libertad y que lo hemos descritopor m coordenadas generalizadas. Existiran por tanto k = m − n ligaduras. Lasligaduras son susceptibles de clasificarse desde distinto puntos de vista pero aquıadoptaremos el siguiente
3..1 Ligaduras holonomas
Son las que pueden expresarse como una relacion entre las coordenadas
fi(qj, t) = 0 i = 1...k j = 1...m (3.1)
En tal caso, estas k ecuaciones permiten eliminar k coordenadas. Es el caso delejmplo que hemos visto en el apartado 2.6.
3..2 Ligaduras no holonomas
Son aquellas en que las ligaduras solo pueden expresarse en terminos de las veloci-dades, es decir:
m∑j=1
aij qj = ai i = 1....k (3.2)
Para trabajar con este tipo de ligaduras empleamos los multiplicadores de La-grange definidos como k coeficientes λi tales que
k∑i=1
λiai = 0 (3.3)
y por tantok∑
i=1
λi
m∑j=1
aijδqj =m∑
j=1
k∑i=1
λiaijδqj = 0 (3.4)
Teniendo en cuenta que el principio de Hamilton es:
δS =
∫ t2
t1
m∑j=1
[∂L
∂qj
−(
d
dt
∂L
∂qj
)]δqjdt = 0 (3.5)

Mecanica de Lagrange y Hamilton 145
Podemos introducir (3.4) en (3.5) como:
δS =
∫ t2
t1
m∑j=1
[∂L
∂qj
−(
d
dt
∂L
∂qj
)−
k∑i=1
λiaij
]δqjdt = 0 (3.6)
Tenemos pues las m ecuaciones
∂L
∂qj
−(
d
dt
∂L
∂qj
)−
k∑i=1
λiaij = 0 j = 1...m (3.7)
que junto con las k ligaduras (3.2) determinan las m coordenadas qj y los k mul-tiplicadores λi.
Conocidos los multiplicadores se pueden determinar las fuerzas de ligaduracomo:
(Fl)j =k∑
i=1
λiaij (3.8)
3..3 Ejemplos
Partıcula obligada a moverse sobre una curva
Supongamos una partıcula que resbala bajo la accion de la gravedad sobre un arovertical tal como indica la figura. Supongamos que parte formando un angulo(θ = θ0) con la vertical. Al cabo de un tiempo T se despegara de la curva. Enconsecuencia para t < T hay un solo grado de libertad pues existe la ligadurar = R. Por el contrario para t > T la ligadura desaparece y hay dos grados delibertad

146 Capıtulo 4
Tratemos pues el problema con dos coordenadas generalizadas r y θ
L =m
2(x2 + y2)−mgy (3.9)
y una ligadura holonoma que trataremos como si fuera no holonoma
r = R =⇒ r = 0 =⇒ a11 = 1, a12 = 0, a1 = 0
Las ecuaciones del movimiento seran
mr −mrθ2 + mg cos θ − λ = 0
mr2θ + 2mrrθ −mgr sin θ = 0
r = 0 (3.10)
o bien
λ = −mrθ2 + mg cos θ
0 = θ − g
rsin θ (3.11)
que para θ pequena es:
λ = −mrθ2 + mg
0 = θ − g
rθ (3.12)
cuya solucion es:
θ = θ0 exp(
√g
Rt)
λ = mg
(1− θ2
0 exp(2
√g
Rt
)(3.13)
Por tanto la ligadura λ se anula en el instante T tal que
T = −√
R
gln θ0 (3.14)
que a pesar del signo menos es positivo ya que θ0 < π2
< 1
4. Formulacion Hamiltoniana
4..1 Funcion de Hamilton
Se define la funcion de Hamilton como:
H(q1, ...qn, p1, ...pn, t) =n∑
i=1
piqi − L(q1, ...qn, q1, ...qn, t) (4.1)

Mecanica de Lagrange y Hamilton 147
4..2 Ecuaciones de Hamilton
diferenciando ambos miembros:
dH =∂H
∂tdt +
∂H
∂qi
dqi +∂H
∂pi
dpi
=n∑
i=1
[pidqi + qidpi]− ∂L
∂tdt
−n∑
i=1
∂L
∂qi
dqi −n∑
i=1
∂L
∂qi
dqi (4.2)
Los terminos en dqi se anulan como consecuencia de (2.16). Por otra parte, de(2.16) y (2.7) se sigue que:
pi =∂L
∂qi
(4.3)
por lo que igualando coeficientes en (4.2) tenemos:
qi =∂H
∂pi
(4.4)
pi = −∂H
∂qi
(4.5)
y∂L
∂t= −∂H
∂t(4.6)
Las 2n ecuaciones (4.4) y (4.5) son las ecuaciones de Hamilton
Coordenadas cıclicas
Si H no depende explıcitamente de una de las coordenadas qk entonces esa coor-denada es cıclica y, de acuerdo con (4.5), su momento conjugado es constante
4..3 Conservacion del Hamiltoniano
Derivando (4.1) con respecto al tiempo tenemos:
dH
dt=
n∑i=1
[∂H
∂qi
qi +∂H
∂pi
pi
]+
∂H
∂t(4.7)
que en virtud de (4.4)− (4.6) es:
dH
dt=
∂H
∂t= −∂L
∂t(4.8)
Por lo que si el sistema es autonomo, el Hamiltoniano es una constantedel movimiento

148 Capıtulo 4
4..4 Significado fısico del hamiltoniano
Si, como hemos supuesto, el potencial no depende de las velocidades, entonces:
pi =∂L
∂qi
=∂T
∂qi
(4.9)
y teniendo en cuenta los tres terminos de la energıa cinetica, el hamiltoniaro sera:
H =n∑
i=1
[qi
∂T0
∂qi
+ qi∂T1
∂qi
+ qi∂T2
∂qi
]− T0 − T1 − T2 + V (4.10)
Ahora bien, teniendo en cuenta las definiciones de T0, T1 y T2, es facil comprobarque:
∂T0
∂qi
= 0 (4.11)
qi∂T1
∂qi
= qiBi (4.12)
qi∂T2
∂qi
= 2qi
∑j
Aij qj (4.13)
de forma que:
n∑i=1
qi∂T1
∂qi
= T1 (4.14)
n∑i=1
qi∂T2
∂qi
= 2T2 (4.15)
con lo cualH = T2 − T0 + V (4.16)
en consecuencia:
• Si el sistema es natural (y por tanto autonomo) H es conservado yes la energıa del sistema.
• Si el sistema es autonomo pero no natural H es conservado, perono es la energıa del sistema.

Mecanica de Lagrange y Hamilton 149
5. Problemas
Enunciados
1) Pruebese que las geodesicas de una superficie esferica son circulos maximos, esdecir, circunferencias cuyo centro coincide con el de la esfera.
2) Demostrar que la curva cuya revolucion genera una superficie de area mınimaes la catenaria.
3) Hallar la curva a lo largo de la cual una partıcula que cae bajo la accion de lagravedad lo hace en el menor tiempo posible.
4) Determinar la trayectoria seguida por un proyectil que se lanza con velocidadv0 formando un angulo α con la horizontal.
5) Estudiar el pendulo doble utilizando el formalismo lagrangiano.
6) Una partıcula de masa m se mueve a lo largo de una curva llamada cicloide deecuaciones
x = a(u− sin u), y = −a(1− cos u)
Obtener el lagrangiano, la ecuacion de movimiento y la ley de movimiento de lapartıcula . (Sugerencia: utilizar como coordenada generalizada la longitud delarco s).
7) Consideremos el sistema de la figura. Las masas son iguales y las constantesdel muelle tambien. La distancia entre las dos paredes es 3L y la longitud naturalde los muelles es l0. Estudiar el sistema en mecanica lagrangiana y hamiltoniana.
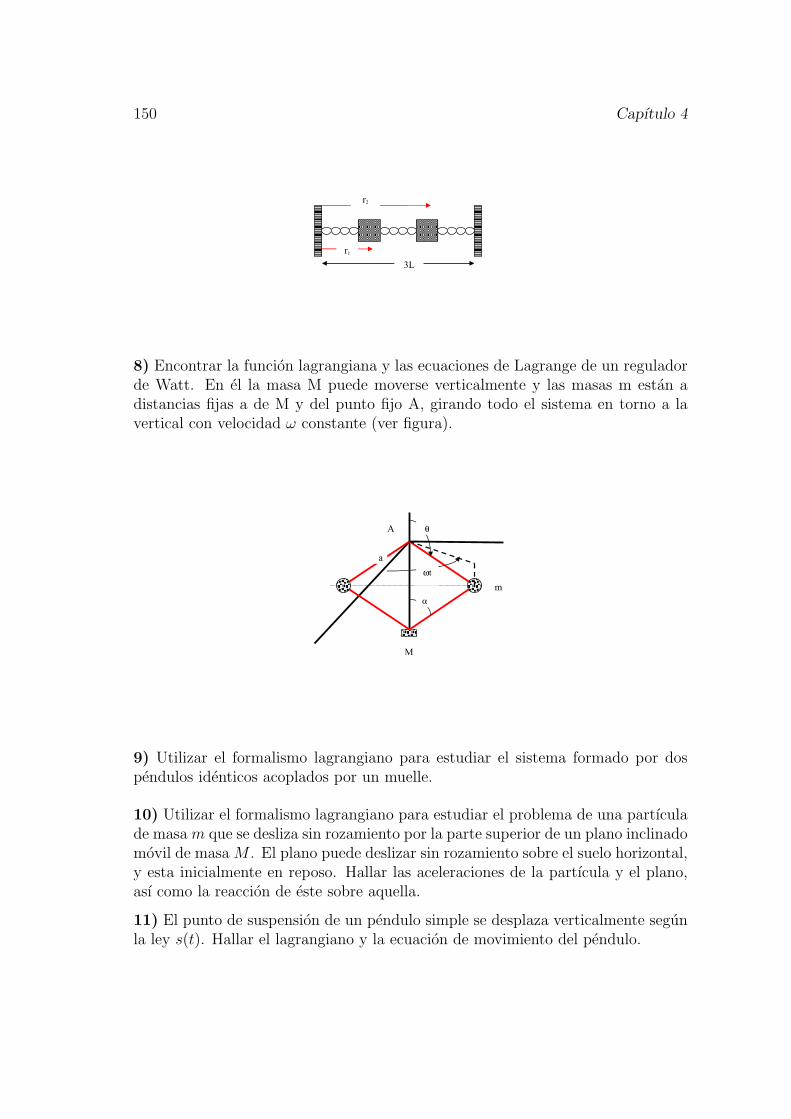
150 Capıtulo 4
8) Encontrar la funcion lagrangiana y las ecuaciones de Lagrange de un reguladorde Watt. En el la masa M puede moverse verticalmente y las masas m estan adistancias fijas a de M y del punto fijo A, girando todo el sistema en torno a lavertical con velocidad ω constante (ver figura).
θ
ω
α
9) Utilizar el formalismo lagrangiano para estudiar el sistema formado por dospendulos identicos acoplados por un muelle.
10) Utilizar el formalismo lagrangiano para estudiar el problema de una partıculade masa m que se desliza sin rozamiento por la parte superior de un plano inclinadomovil de masa M . El plano puede deslizar sin rozamiento sobre el suelo horizontal,y esta inicialmente en reposo. Hallar las aceleraciones de la partıcula y el plano,ası como la reaccion de este sobre aquella.
11) El punto de suspension de un pendulo simple se desplaza verticalmente segunla ley s(t). Hallar el lagrangiano y la ecuacion de movimiento del pendulo.

Mecanica de Lagrange y Hamilton 151
12) Encontrar la funcion lagrangiana y las ecuaciones de lagrange de un penduloplano de masa m y longitud l cuyo punto de suspension
a) puede desplazarse a lo largo de una recta horizontalb) se desplaza uniformemente en una circunferencia vertical con velocidad an-
gular constante
ϕϕϕϕ
θ
ω
ϕϕϕϕ
ωωωω
ϕϕϕϕ
ωωωω
c) efectua oscilaciones horizontales de la forma A cos ωtd) efectua oscilaciones verticales de la forma A sen ωt
13) Una partıcula se mueve a lo largo de una parabola (el eje de la parabola eshorizontal) bajo la accion del campo gravitatorio. La partıcula parte del reposo yse conoce su posicion inicial. Determinar la altura a la que la partıcula se despegade la parabola.
14) Demostrar que si L es el lagrangiano de un sistema que satisface las ecuacionesde Euler-Lagrange, entonces L′ = L+dF (q, t)/d t tambien satisface las ecuacionesde Euler-Lagrange.
15) Demostrar que las ecuaciones del movimiento de Euler-Lagrange son invari-antes respecto a la transformacion de las ecuaciones del movimiento q → s(q, t).
16) Demostrar que el lagrangiano L = m2 x4/12 + m x2 V (x) − V 2(x) tiene lasmismas ecuaciones del movimiento que L′ = m x2/2− V (x).
17) Demostrar que el lagrangiano L = 12eαt (x2−ω2x2), proporciona las ecuaciones
del movimiento de un oscilador armonico amortiguado. Comentar el resultado.

152 Capıtulo 4
1) Pruebese que las geodesicas de una superficie esferica son circulos maximos, esdecir, circunferencias cuyo centro coincide con el de la esfera.
Solucion
Si la partıcula se mueve en una superficie esferica de radio R, su posicion encualquier instante de tiempo vendra dada por la parametrizacion de la esfera, que,en coordenadas esfericas es
x = R sin θ cos ϕ,
y = R sin θ sin ϕ,
z = R cos θ
por lo cual, el elemento diferencial de arco debera satisfacer:
ds2 = R2(dθ2 + sin2 θdϕ2)
Tomando la expresion para la curva en la forma θ = θ(ϕ), tendremos para lalongitud de arco
s =
∫ ϕ2
ϕ1
R√
θ2 + sin2 θ dϕ
Para determinar la longitud de arco mınima, deberemos aplicar la ecuacion deEuler-Lagrange a
F = R√
θ2 + sin2 θ
y el resultado es
sin θ cos θ
(θ2 + sin2 θ)1/2=
d
dϕ
(θ
(θ2 + sin2 θ)1/2
)
Derivando y simplificando obtenemos la ecuacion diferencial
d
dϕ
(θ
sin2 θ
)=
cos θ
sin θ
La ecuacion anterior es facil de resolver haciendo el cambio
p =cos θ
sin θ
en cuyo caso se transforma simplemente en
p + p = 0

Mecanica de Lagrange y Hamilton 153
cuya integracion proporciona
p = A cos ϕ + B sin ϕ
Deshaciendo el cambio de variable obtenemos
cos θ = sin θ(A cos ϕ + B sin ϕ)
o bien en coordenadas cartesianas,
z
R= A
x
R+ B
y
R
De manera quez = Ax + By
La ecuacion anterior es la de un plano que pasa por el origen, y por lo tanto lasgeodesicas de la superficie esferica son cırculos maximos.

154 Capıtulo 4
2) Demostrar que la curva cuya revolucion genera una superficie de area mınimaes la catenaria.
Solucion
Supongamos que la ecuacion de la curva que buscamos es y = y(x) (es decirz = z(ρ)).
ρϕ
El elemento diferencial de superficie que esta curva engendra al girar alrededordel eje Z es
dS = ρdϕds = ρdϕ√
dρ2 + dz2 = ρdϕ√
1 + z′2 dρ
siendo z′ = dz/dρ. La superficie engendrada vendra entonces definida por mediode la integral
S = 2π
∫ ρ2
ρ1
ρ√
1 + z′2 dρ
Para que la superficie sea mınima deberemos aplicar el principio variacional aF = ρ
√1 + z′2, es decir
∂F
∂z=
d
dρ
(∂L
∂z′
)
y el resultado esd
dρ
[ρz′√
1 + z′2
]
y por tanto integrandoρz′√
1 + z′2= a
siendo a una primera constante de integracion. La ecuacion diferencial anteriorpuede ser integrada directamente, el resultado es
z + b = aln(x +√
ρ2 − a2)

Mecanica de Lagrange y Hamilton 155
donde b es la segunda constante de integracion. Ambas constantes pueden determi-narse en cada caso a partir de las condiciones en los extremos, es decir, z1 = z(ρ1),z2 = z(ρ2).
La expresion anterior para la curva puede escribirse en terminos de exponen-ciales como
ρ =a
2
(e
z+ba + e−
z+ba
)
y por tanto
ρ = a cosh
(z + b
a
)
Concluimos entonces que la curva que genera una superficie de area mınima algirar alrededor del eje Z es la catenaria.

156 Capıtulo 4
3) Hallar la curva a lo largo de la cual una partıcula que cae bajo la accion de lagravedad lo hace en el menor tiempo posible.’
Solucion
Si la velocidad de la partıcula a lo largo de la curva es v, el tiempo requeridopara recorrer un arco de longitud ds sera ds/v. El problema consistira entoncesen hallar el mınimo de la integral,
t12 =
∫ 2
1
dt =
∫ 2
1
ds
v
La conservacion de la energıa para la partıcula en cualquier punto es
0 =1
2mv2 −mgy
lo cual nos permite expresar la integral anterior, utilizando la expresion para lavelocidad, en la forma
t12 =
∫ 2
1
√1 + y′2√2gy
dx
Por lo tanto en este caso debemos aplicar el principio variacional a
F =
√1 + y′2
2gy
Calculemos por separado los dos miembros de la ecuacion de Euler-Lagrange. Elresultado es
∂F
∂y= −1
2
√1 + y′2
2gy3,
d
dx
(∂F
∂y′
)=
1√2gy(1 + y′2)
[y′′ − 1
2
y′2
y− y′2y′′
(1 + y′2)
]
Igualando ambas expresiones y simplificando
1 + y′2 + 2yy′′ = 0
que puede integrarsey(1 + y′2) = c
siendo c la constante de integracion. Para resolver la ecuacion diferencial es utilhacer el cambio y = c sin2 u, en cuyo caso obtenemos para x la expresion
x = c(u− 1
2sin 2u + d)

Mecanica de Lagrange y Hamilton 157
Basta ya redefinir u = 2t y c = 2a para obtener las ecuaciones parametricas parala curva
x = a(t− sin t + b),
y = a(1− cos t)
Las constantes de integracion a y b se determinaran a partir de las condicionesiniciales. Por ejemplo si para t = 0 x = 0, se tendra que b = 0. Por lo tantola ecuacion de la curva buscada es la de la cicloide que hara que la partıculacaiga a traves de ella en un tiempo mınimo cuando esta sometida unicamente a lagravedad.

158 Capıtulo 4
4) Determinar la trayectoria seguida por un proyectil que se lanza con velocidadv0 formando un angulo α con la horizontal.
Solucion
El sistema posee dos grados de libertad dados por las coordenadas x e y. Ellagrangiano del sistema sera
L = T − V =1
2m(x2 + y2)−mgy
siendo m la masa del proyectil. Tenemos por tanto dos coordenadas generalizadasy dos ecuaciones de Euler-Lagrange asociadas a cada una de ellas
0 =d
dt(mx),
−mg =d
dt(my)
La integracion de las ecuaciones anteriores proporciona ya las ecuaciones para latrayectoria
x = c + at,
y = d + bt− 1
2gt2
Las constantes de integracion pueden determinarse utilizando las condiciones ini-ciales, es decir que para t = 0 la posicion y velocidad del proyectil son
x(0) = x0, y(0) = y0,
vx(0) = v0 cos α, vy(0) = v0 sin α
con lo cual las ecuaciones para la trayectoria quedan en la forma
x = x0 + v0t cos α,
y = y0 + v0t sin α− 1
2gt2
tal y como cabıa esperar.

Mecanica de Lagrange y Hamilton 159
5) Estudiar el pendulo doble utilizando el formalismo lagrangiano.
Solucion
φ
φ
Suponemos por simplicidad que las masas y las longitudes de los pendulos soniguales. El sistema tiene dos grados de libertad y por tanto dos coordenadasgeneralizadas θ1 y θ2. Teniendo en cuenta la figura
x1 = l sin θ1, y1 = −l cos θ1,
x2 = l(sin θ1 + sin θ2), y2 = −l(cos θ1 + cos θ2)
Derivando estas expresiones obtenemos la expresion para la energıa cinetica
T =1
2m(x2
1 + x22) = ml2
(θ21 +
1
2θ22 + cos(θ1 − θ2)θ1θ2
)
En cuanto a la energıa potencial
U = −mg(y1 + y2) = −mgl(2 cos θ1 + cos θ2)
Por lo tanto el lagrangiano del sistema sera
L = T − U = ml2(
θ21 +
1
2θ22 + cos(θ1 − θ2)θ1θ2
)+ mgl(2 cos θ1 + cos θ2)
Tenemos dos coordenadas generalizadas y por tanto dos ecuaciones de Lagrange,que toman la forma
d
dt[ml2(2θ1 + θ2 cos(θ1 − θ2))] + ml2θ1θ2 sin (θ1 − θ2) + 2mgl sin θ1 = 0,
d
dt[ml2(θ2 + θ1 cos(θ1 − θ2))]−ml2θ1θ2 sin (θ1 − θ2) + mgl sin θ2 = 0,

160 Capıtulo 4
6) Una partıcula de masa m se mueve a lo largo de una curva llamada cicloide deecuaciones
x = a(u− sin u)
y = −a(1− cos u)
(el eje y tiene el sentido vertical hacia arriba). Obtener el lagrangiano, la ecuacionde movimiento y la ley de movimiento de la partıcula . (Sugerencia: utilizar comocoordenada generalizada la longitud del arco s).
Solucion
Interesa utilizar como coordenada generalizada la longitud de arco. Para ellocalculamos
x = a(1− cos u)u,
y = −a sin uu
Por lo tantods2 = dx2 + dy2 = 4a2 sin2 u
2du2
y la longitud de arco sera integrando
s = −4a cosu
2
Elijamos por simplicidad como coordenada generalizada q = − s4a
. Se tiene en-tonces
q = cosu
2, q = −1
2u sin
u
2
Podemos ya escribir y, x y y en terminos de q en la forma
y = −2a(1− q2),
x = −4aq√
1− q2,
y = 4aqq

Mecanica de Lagrange y Hamilton 161
Para deteminar el lagrangiano del sistema es necesario conocer las energıas cineticay potencial
T =1
2m(x2 + y2) = 8ma2q2,
V = mgy = −2mga(1− q2)
El lagrangiano sera entonces
L = T − V = 8ma2q2 + 2mga(1− q2)
El siguente paso es calcular la ecuacion del movimiento y resolverla para obtenerlas leyes del movimiento. La ecuacion de Lagrange es
∂L
∂q=
d
dt
(∂L
∂q
)→ 4aq + gq = 0
que constituye la ecuacion del movimiento. Para obtener la trayectoria integramos
q = A cos(ωt + ϕ)
siendo la frecuencia del movimiento
ω =
√q
4a
y donde A y ϕ son constantes de integracion que determinaremos a partir de lascondiciones iniciales. Ası si por ejemplo suponemos que en el instante t = 0 lapartıcula se encuentra en el origen, tendremos que
y(0) = x(0) = 0,→ u(0) = 0,→ y(0) = 0
Estas condiciones proporcionan las condiciones iniciales sobre q y su derivada,
q(0) = 1, q(0) = 0
que determinan las constantes
A = 1
ϕ = 0
con lo cualq = cos ωt
Teniendo ya en cuenta las expresiones para x e y en terminos de q obtenemos lasecuaciones de la trayectoria
x = a (2a cos(cos ωt)− sin 2ωt) ,
y = −2a sin2 ωt
que constituyen las leyes del movimiento para la partıcula.

162 Capıtulo 4
7) Consideremos el sistema de la figura. Las masas son iguales y las constantesdel muelle tambien. La distancia entre las dos paredes es 3L y la longitud naturalde los muelles es l. Estudiar el sistema en mecanica lagrangiana y hamiltoniana.
Solucion
• Coordenadas generalizadasSean r1 y r2 las distancias de cada una de las masas a la pared de la izquierda.
El muelle 1 medira r1, el muelle 2 r2 − r1 y el muelle 3, 3L− r2.
• Lagrangiano
L =1
2mr1
2 +1
2mr2
2 − 1
2k(r1 − l)2 − 1
2k(r2 − r1 − l)2 − 1
2k(3L− r2 − l)2
• Ecuaciones de Lagrange
mr1 = −k(r1 − l) + k(r2 − r1 − l)
mr2 = −k(r2 − r1 − l) + k(3L− r2 − l)
• momentos
p1 = mr1
p2 = mr2
• Hamiltoniano
H =p2
1
2m+
p21
2m+
1
2k(r1 − l)2 +
1
2k(r2 − r1 − l)2 +
1
2k(3L− r2 − l)2
• Ecuaciones de hamilton
r1 =p1
m

Mecanica de Lagrange y Hamilton 163
r2 =p2
m
p1 = −k(r1 − l) + k(r2 − r1 − l)
p1 = −k(r2 − r1 − l) + k(3L− r2 − l)
• soluciones
La posicion de equilibrio corresponde a r1 = r2 = 0 y por tanto a r2
2= r1 = L.
Tiene pues sentido hacer el cambio de variables
q1 = r1 − L
q2 = r2 − 2L
en cuyo caso las ecuaciones del movimiento son
mq1 = k(q2 − 2q1)
mq2 = k(−2q2 + q1)
buscando soluciones oscilatorias
q1 = A1 cos(ωt + ϕ)
q2 = A2 cos(ωt + ϕ)
obtenemos−mω2A1 = k(A2 − 2A1)
−mω2A2 = k(−2A2 + A1)
es decirA1(2k −mω2)− kA2 = 0
−A1k + A2(2k −mω2) = 0
Por tanto(2k −mω2)2 = k2
cuyas soluciones sonmω2 = k =⇒ A2 = A1
mω2 = 3k =⇒ A2 = −A1
de manera que la solucion general es
q1 = A cos(ω0t + ϕ1) + B cos(√
3ω0t + ϕ2)
q2 = A cos(ω0t + ϕ1)−B cos(√
3ω0t + ϕ2)
donde ω20 = k
m

164 Capıtulo 4
8) Encontrar la funcion lagrangiana y las ecuaciones de Lagrange de un reguladorde Watt. En el la masa M puede moverse verticalmente y las masas m estan adistancias fijas a de M y del punto fijo A, girando todo el sistema en torno a lavertical con velocidad ω constante (ver figura).
θ
ω
α
Solucion
Hay un solo grado de libertad dado por el angulo α que forman las masas con lavertical. Si tomamos el origen en A. Las coordenadas de las masas son
~r1 : θ = π − α, ϕ = π + ωt, r = a
~r2 : θ = π − α, ϕ = ωt, r = a~r3 : x = 0, y = 0, z = −2a cos α
que en cartesianas son
~r1 = (−a sin α cos ωt, −a sin α sin ωt, −a cos α)
~r2 = (a sin α cos ωt, a sin α sin ωt, −a cos α)
~r3 = (0, 0, −2a cos α)
De modo que:
~ 1r = (−aα cos α cos ωt+aω sin α sin ωt,− aα cos α sin ωt−aω sin α cos ωt, aα sin α)

Mecanica de Lagrange y Hamilton 165
~ 2r = (aα cos α cos ωt− aω sin α sin ωt, aα cos α sin ωt + aω sin α cos ωt, aα sin α)
~ 3r = (0, 0, 2aα sin α)
y el lagrangiano sera
L = m[a2α2 + a2ω2 sin2 α] + 2Ma2α2 sin2 α + 2mga cos α + 2Mga cos α
La ecuacion de Lagrange es
2ma2α + 4Ma2 sin2 αα + 8Ma2α2 sin α cos α =
2ma2ω2 sin α cos α + 4Ma2α2 sin α cos α− 2ag(m + M) sin α
que puede ser simplificada (para angulos pequenos) como
α + 2M
mαα2 +
[(m + M)g −maω2
ma
]α = 0

166 Capıtulo 4
9) Utilizar el formalismo lagrangiano para estudiar el sistema formado por dospendulos identicos acoplados por un muelle.
Solucion
θ2
θ1
En terminos de los angulos θ1 y θ2 podemos escribir
x1 = l sin θ1, x2 = a + l sin θ2, (5.1)
y1 = l cos θ1, y2 = l cos θ2 (5.2)
y para sus derivadas
x1 = l cos θ1θ1, x2 = l cos θ2θ2, (5.3)
y1 = −l sin θ1θ1, y2 = −l sin θ2θ2 (5.4)
La energıa cinetica sera por tanto
T =1
2ml2(θ2
1 + θ22) (5.5)
La energıa potencial vendra dada por
U = −mgy1 −mgy2 +1
2k(d− a)2 (5.6)
Consideremos que los angulos son pequenos. En tal caso podemos aproximar elseno y coseno en desarrollo de Taylor quedandonos a segundo orden, con lo cual
x1 = lθ1 + O(3), x2 = a + lθ2 + O(3), (5.7)
y1 = l
(1− 1
2θ21
)+ O(4), y2 = l
(1− 1
2θ22
)+ O(4) (5.8)

Mecanica de Lagrange y Hamilton 167
En esta aproximacion es facil comprobar que
d2 = (a + l(θ2 − θ1))2 (5.9)
y por tanto que
(d− a)2 = l2(θ2 − θ1)2 (5.10)
El lagrangiano sera entonces
L = 2mgl +1
2ml2(θ2
1 + θ22)−
1
2mgl(θ2
1 + θ22)−
1
2kl2(θ2 − θ1)
2 (5.11)
Las ecuaciones de Lagrange quedan en la forma
θ1 = −(
g
l+
k
m
)θ1 +
k
mθ2, (5.12)
θ2 =k
mθ1 −
(g
l+
k
m
)θ2 (5.13)
La solucion de este sistema lineal de ecuaciones diferenciales acopladas es de laforma
θ1 = A+1 cos(ω1t− ϕ+) + A−
1 sin (ω2t− ϕ−), (5.14)
θ2 = A+2 cos(ω1t− ϕ+) + A−
2 sin (ω2t− ϕ−) (5.15)
donde las frecuencias ω1 y ω2 son las soluciones de la ecuacion
∣∣∣∣ω2 −(
g
l+
k
m
)− k
m
k
mω2 −
(g
l+
k
m
)∣∣∣∣ = 0 (5.16)
es decir,
ω1 = ω+ =√
ω2p + ω2
m, (5.17)
ω2 = ω− = ωp (5.18)
donde ωp y ωm vienen dadas en terminos de la masa, la longitud de los pendulosy la constante de elasticidad del muelle,
ωp =
√q
l, (5.19)
ωm =
√2
k
m(5.20)

168 Capıtulo 4
y las amplitudes satisfacen
A+1
A+2
=km
gl+ k
m− ω2
+
= −1, (5.21)
A−1
A−2
=km
gl+ k
m− ω2−
= 1 (5.22)
Utilizando todos los resultados anteriores tenemos las ecuaciones del movimiento
θ1 = A+ cos(ω+t− ϕ+) + A− cos(ω−t− ϕ−), (5.23)
θ2 = −A+ cos(ω+t− ϕ+) + A− cos(ω−t− ϕ−) (5.24)
donde hemos redefinido la constante ϕ−.Tenemos por tanto cuatro constantes de integracion que determinaremos a
partir de las condiciones iniciales. Consideremos tres situaciones diferentes.
• Caso 1Tomamos como condiciones iniciales que los pendulos se encuentren en reposo
y formando ambos el mismo angulo θ0 con la vertical, es decir
θ1(0) = θ2(0) = θ0, (5.25)
θ1(0) = θ2(0) = 0 (5.26)
Es facil ver que en este caso las constantes son
A+ = 0, A− = θ0, ϕ− = 0 (5.27)
y por tanto la solucion es
θ1 = θ0 cos ωpt, (5.28)
θ2 = θ0 cos ωpt (5.29)
Los dos pendulos oscilan de forma sincronizada como si fuera un solo pendulo, confrecuencia ωp. Es como si el muelle no existiera.
• Caso 2Tomamos como condiciones iniciales que los pendulos se encuentren en reposo
y formando ambos el mismo angulo θ0 con la vertical pero en sentidos opuestos,es decir
θ1(0) = −θ2(0) = θ0, (5.30)
θ1(0) = θ2(0) = 0 (5.31)
Es facil ver que en este caso las constantes son
A+ = θ0, A− = 0, ϕ+ = 0 (5.32)

Mecanica de Lagrange y Hamilton 169
y por tanto la solucion es
θ1 = θ0 cos ω+t, (5.33)
θ2 = −θ0 cos ω+t (5.34)
con lo cual los pendulos oscilan en oposicion de fase (desfasados un angulo π), conla misma amplitud y con frecuencia
ω+ =√
ω2p + ω2
m (5.35)
• Caso 3Tomamos como condiciones iniciales que los pendulos se encuentren en reposo,
uno de ellos formando un angulo θ0 con la vertical y el otro vertical, es decir
θ1(0) = 0, θ2(0) = θ0, (5.36)
θ1(0) = θ2(0) = 0 (5.37)
Es facil ver que en este caso las constantes son
A+ = −A− = −θ0
2, ϕ+ = ϕ− = 0 (5.38)
y por tanto la solucion es
θ1 =θ0
2(cos ωpt− cos ω+t), (5.39)
θ2 =θ0
2(cos ωpt + cos ω+t) (5.40)
Luego en este caso el movimiento se transmite de uno a otro pendulo alternativa-mente.

170 Capıtulo 4
10) Utilizar el formalismo lagrangiano para estudiar el problema de una partıculade masa m que se desliza sin rozamiento por la parte superior de un plano inclinadomovil de masa M . El plano puede deslizar sin rozamiento sobre el suelo horizontal,y esta inicialmente en reposo. Hallar las aceleraciones de la partıcula y el plano,ası como la reaccion de este sobre aquella.
Solucion
Sean (x1, y1) y (x2, y2) las coordenadas de la partıcula y del plano respectivamenteen cualquier instante de tiempo, y sea α la inclinacion del plano sobre la horizontal.La coordenada y2 es una constante ya que el plano solo se desplaza en direccionhorizontal. Tenemos entonces tres coordenadas y una ligadura entre ellas dada porla condicion de que la partıcula esta siempre en el plano. Esta restriccion puedeexpresarse como
tg α =y1
x2 − x1
(5.1)
es decir, tenemos una ligadura de la forma
f = y1 − (x2 − x1) tg α = 0 (5.2)
Tenemos por lo tanto un sistema con una ligadura y como consecuencia un multi-plicador de Lagrange λ. El lagrangiano es simplemente
L = T − U =1
2m(x2
1 + y21) +
1
2Mx2
2 −mgy1 (5.3)
Las ecuaciones de Lagrange seran entonces
mx1 = λ tg α, (5.4)
my1 = −mg + λ, (5.5)
Mx2 = −λ tg α (5.6)
Por otro lado derivando dos veces la condicion de la ligadura
y1 = (x2 − x1) tg α (5.7)
Combinando las expresiones anteriores obtenemos para λ
λ =Mmg cos2 α
M + m sin2 α(5.8)

Mecanica de Lagrange y Hamilton 171
En consecuencia, las aceleraciones para la partıcula y el plano son
a1,x = x1 = λtg α
m= Mg
sin α cos α
M + m sin2 α, (5.9)
a2,x = x2 = −λtg α
M= −mg
sin α cos α
M + m sin2 α, (5.10)
a1,y = y1 = −g +λ
m= −(M + m)g
sin2 α
M + m sin2 α, (5.11)
a2,y = y2 = 0 (5.12)
Las fuerzas de ligadura son
F1,x = ma1,x, F2,x = Ma2,x = −F1,x, (5.13)
F1,y = λ, F2,y = 0 (5.14)
Las fuerzas F1,x y F1,y son las componentes cartesianas de la reaccion del planosobre la partıcula, su modulo es la fuerza normal. Es interesante notar que F1,x +F2,x = 0 es precisamente la expresion para la tercera ley de Newton.

172 Capıtulo 4
11) El punto de suspension de un pendulo simple se desplaza verticalmente segunla ley s(t). Hallar el lagrangiano y la ecuacion de movimiento del pendulo.
Solucion
Se trata de un sistema con dos grados de libertad dados por s y el angulo ϕ queforma el hilo del pendulo con la vertical. Las coordenadas x e y de la masa seescriben en terminos de las coordenadas generalizadas s y ϕ como
x = l sin ϕ,
y = s− l cos ϕ
siendo l la longitud del hilo del pendulo. La velocidad vendra dada por
v2 = x2 + y2 = l2ϕ2 + 2lsϕ sin ϕ + s2
y por lo tanto el lagrangiano es
L =1
2m(l2ϕ2 + 2lsϕ sin ϕ + s2)−mg(s− l cos ϕ)
Las ecuaciones de Euler-Lagrange son
∂L
∂s=
d
dt
∂L
∂s,
∂L
∂ϕ=
d
dt
∂L
∂ϕ
y por tanto las ecuaciones del movimiento
g + s + lϕ sin ϕ + lϕ2 cos ϕ = 0,
ϕ +1
l(g + s) sin ϕ = 0
La primera de las ecuaciones puede escribirse
(g + s) cos ϕ + lϕ2 = 0
donde hemos utilizado la segunda para eliminar ϕ. Es posible ya escribir unaecuacion solo en ϕ eliminando s, esto es
ϕ− ϕ2 tg ϕ = 0

Mecanica de Lagrange y Hamilton 173
12) Encontrar la funcion lagrangiana y las ecuaciones de lagrange de un penduloplano de masa m y longitud l cuyo punto de suspension
a) puede desplazarse a lo largo de una recta horizontal
b) se desplaza uniformemente en una circunferencia vertical con velocidad an-gular constante
c) efectua oscilaciones horizontales de la forma A cos ωt
d) efectua oscilaciones verticales de la forma A sen ωt
Solucion
a) Hay dos grados de libertad dados por la distancia q recorrida por el puntode suspension y el angulo θ del pendulo.
ϕϕϕϕ
x = q + l sen θ
y = −l cos θ
el sistema es pues natural y su lagrangiano es:
L =1
2[x2 + l2θ2 + 2lqθ cos θ] + mgl cos θ
b) Hay un solo grado de libertad dado por la coordenada θ

174 Capıtulo 4
θ
ω
x = R sen ωt + l sen θ
y = −R cos ωt− l cos θ
el sistema no es natural y su lagrangiano es:
L =1
2[R2ω2 + l2θ2 + 2lRωθcos(ωt− θ)] + mg[R cos ωt + l cos θ]
de manera que no es autonomo
c) Hay un solo grado de libertad dado por la coordenada θ
ϕϕϕϕ
ωωωω
x = A cos ωt + l sen θ
y = −l cos θ

Mecanica de Lagrange y Hamilton 175
el sistema no es natural y su lagrangiano es:
L =1
2[A2ω2 sen2 ωt + l2θ2 − 2Alωθ cos θ sen ωt] + mgl cos θ
que no es autonomo
d) Hay un solo grado de libertad dado por la coordenada θ
ϕϕϕϕ
ωωωω
x = l sen θ
y = −A sen ωt− l cos θ
el sistema no es natural y su lagrangiano es:
L =1
2[A2ω2 cos2 ωt + l2θ2 − 2Alωθcosωt sin θ] + mg[A sen ωt + l cos θ]
de manera que no es autonomo

176 Capıtulo 4
13) Una partıcula se mueve a lo largo de una parabola (el eje de la parabola eshorizontal) bajo la accion del campo gravitatorio. La partıcula parte del reposo yse conoce su posicion inicial. Determinar la altura a la que la partıcula se despegade la parabola.
Solucion
Supongamos como condicion inicial que la partıcula en el instante t = 0 se en-cuentra en y0. Se trata de un sistema con ligaduras, en el cual, antes de despegarsede la parabola la partıcula esta sujeta a una ligadura dada por
f = y2 − ax = 0
Las ecuaciones de Euler-Lagrange son en este caso
d
dt
(∂L
∂qi
)=
∂L
∂qi
+ λ∂f
∂qi
siendo λ el multiplicador de Lagrange. En este caso el Lagrangiano sera
L =1
2m(x2 + y2)−mgy
Las ecuaciones del movimiento son entonces
mx = −λa,
my = −mg + 2λy
0 = y2 − ax
multiplicando la primera por x y la segunda por y y sumando tenemos
mxx + myy + mgy + λ(ax− 2yy) = 0

Mecanica de Lagrange y Hamilton 177
Utilizando la ligadura e integrando tenemos
m
2(x2 + y2) + mgy = cte
Empleando las condiciones iniciales
(dotx2 + y2) + g(y − y0) = 0
Sustituyendo x de la condicion de ligadura obtenemos una ecuacion de primerorden para y
y2
(1 +
4
ay2
)= 2g(y0 − y)
que una vez resuelta nos proporciona la ecuacion para x a traves de la ligadura
x = y2/a
En cuanto a λ la podemos obtener substituyendo x en la primera de las ecua-ciones del movimiento
2m
a(yy + y2) + λa = 0
Substituyendo y y y
2m
[y(−g + 2λy/m) + 2ga2 y0 − y
a2 + 4y2
]+ λa = 0
es decir
λ =2gm
(a2 + 4y2)(4y3 + 3a2y − 2a2y0)
Para deteminar la altura a la cual la partıcula se despega de la parabola, bastatener en cuenta que cuando esto sucede la ligadura ya no actua y por lo tantoλ = 0. Entonces la altura a la cual se despega sera y1tal que satisfaga
4y31 + 3a2y1 − 2a2y0 = 0

178 Capıtulo 4
14) Demostrar que si L es el lagrangiano de un sistema que satisface las ecuacionesde Euler-Lagrange, entonces L′ = L+dF (q, t)/d t tambien satisface las ecuacionesde Euler-Lagrange.
Solucion
Si L satisface las ecuaciones de Euler-Lagrange
∂L
∂q− d
dt
(∂L
∂q
)= 0
Veamos que sucede para el lagrangiano L′. Calculamos para ello por separado losdos miembros de las ecuaciones de Euler-Lagrange.
∂L′
∂q=
∂L
∂q+
∂
∂q
(∂F
∂t+
∂F
)=
∂L
∂q+
∂2F
∂q∂t+ q
∂2F
∂q2
d
dt
(∂L′
∂q
)=
d
dt
(∂L
∂q+
∂
∂q
(∂F
∂t+
∂F
))=
d
dt
(∂L
∂q
)+
(∂2F
∂q∂t+ q
∂2F
∂q2
)
Luego tambien para L′ se satisfacen las ecuaciones de Euler-Lagrange
∂L′
∂q− d
dt
(∂L′
∂q
)= 0

Mecanica de Lagrange y Hamilton 179
15) Demostrar que las ecuaciones del movimiento de Euler-Lagrange son invari-antes respecto a la transformacion de las ecuaciones del movimiento q → s(q, t).
Solucion
Sea la transformacion q → s = s(q, t). Tendremos entonces,
s =d
dts =
∂s
∂t+ q
∂s
∂q
por lo tanto s = s(q, q, t). La ecuacion de Lagrange para q es
∂L
∂q=
d
dt
(∂L
∂q
)
Calculemos ambos miembros por separado.
∂L
∂q=
∂L
∂s
∂s
∂q+
∂L
∂s
∂s
∂q
d
dt
(∂L
∂q
)=
d
dt
(∂L
∂s
∂s
∂q
)=
∂s
∂q
d
dt
(∂L
∂s
)+
∂L
∂s
d
dt
(∂s
∂q
)
Teniendo en cuenta la expresion para s es facil ver que
∂s
∂q=
∂s
∂q
y por lo tanto
d
dt
(∂L
∂q
)=
∂s
∂q
d
dt
(∂L
∂s
)+
∂L
∂s
d
dt
(∂s
∂q
)=
∂s
∂q
d
dt
(∂L
∂s
)+
∂L
∂s
∂s
∂q
Comparando las dos expresiones se tiene que la ecuacion de Lagrange es invariantebajo la transformacion, es decir
∂L
∂s=
d
dt
(∂L
∂s
)

180 Capıtulo 4
16) Demostrar que el lagrangiano L = m2 x4/12 + m x2 V (x) − V 2(x) tiene lasmismas ecuaciones del movimiento que L′ = m x2/2− V (x).
Solucion
Consideremos en primer lugar el lagrangiano L′ = m x2/2− V (x). Sus ecuacionesdel movimiento vienen dadas por la ecuacion de Lagrange
∂L′
∂x=
d
dt
(∂L′
∂x
)
que utilizando la expresion para L′ es
mx + V = 0
siendo V = dV/dx. Para el lagrangiano L = m2 x4/12 + m x2 V (x) − V 2(x), setiene
∂L
∂x= (mx2 − 2V )V ,
d
dt
(∂L
∂x
)= mx(mx2 + 2V ) + 2mx2V
y por lo tanto la ecuacion de Lagrange es
(mx + V )(mx2 + 2V ) = 0
La ecuacion del movimiento es por tanto identica a la asociada al lagrangiano L′
mx + V = 0

Mecanica de Lagrange y Hamilton 181
17) Demostrar que el lagrangiano L = 12eαt (x2−ω2x2), proporciona las ecuaciones
del movimiento de un oscilador armonico amortiguado. Comentar el resultado.
Solucion
La ecuacion de Lagrange esd
dt
(∂L
∂x
)=
∂L
∂x
que para el lagrangiano del enunciado es
x + αx + ω2x = 0
que es la ecuacion del oscilador armonico amortiguado con termino de amor-tiguamiento α.
Para este sistema existen dos constantes del movimiento de la forma,
D1 = eλ2t (x + λ1x),
D2 = eλ1t (x + λ2x)
Calculemos cuales son los valores de λ1 y λ2 para que D1 y D2 sean constantes delmovimiento, es decir, para que se verifique
dDi
dt= 0
El resultado esdDi
dt=
∂Di
∂t+
∂Di
∂xx +
∂Di
∂xx = eλjt[(λ1 + λ2 − α)x + (λ1λ2 − ω2)x] = 0
con i, j = 1, 2. Por lo tanto se tiene
λ1 + λ2 = α,
λ1λ2 = ω2
de forma que resolviendo obtenemos las expresiones para λ1 y λ2 en terminos deα y ω como
λ1 =1
2(α±
√α2 − 4ω2),
λ2 =1
2(α∓
√α2 − 4ω2),
(5.1)
Entre las expresiones para D1 y D2 es posible eliminar x para obtener la solucionmas general para la ecuacion del movimiento
x =1
λ1 − λ2
[D1e
−λ2t −D2e−λ1t
]
que depende de las dos constantes del movimiento D1, D2 y de los parametros delsistema α, ω.

182 Capıtulo 4

Capıtulo 5 .
Mecanica relativista
1. Relatividad en la Mecanica clasica
Un hecho fısico es algo que ocurre independientemente del sistema de referenciaque utilicemos para describirlo. En un sistema de referencia dado, un suceso fısicoqueda descrito por cuatro numeros x, y, z, t. Los tres primeros son sus coordenadasespaciales y el ultimo es la coordenada temporal. Ahora bien, dado que estos cuatronumeros varıan de unos sistemas de referencia a otros, lo primero que hemos dehacer es establecer un sistema de referencia. En lo sucesivo trabajaremos siemprecon sistemas inerciales, entendiendo por tales, aquellos en que se verifica la Ley deNewton de la inercia. En tales sistemas, un cuerpo sobre el que no actuen fuerzasexternas se moverıa con velocidad constante. Supongamos dos sistemas inerciales Sy S ′, el segundo de los cuales se mueve respecto al primero con velocidad v. Resultacomodo -y no implica perdida de generalidad- escoger los ejes espaciales paralelosy suponer que v esta dirigida a lo largo del eje x. Supongamos que en el instanteen que los orıgenes O y O’ de los dos sistemas coinciden, los dos observadorescalibran sus relojes y sus reglas de medir y que, posteriormente, cada uno deellos utiliza sus instrumentos para medir las coordenadas espacio-temporales de unsuceso que ocurre en un punto P, obteniendo respectivamente los valores x, y, z, t;y x′, y′, z′, t′; El problema que se nos plantea ahora es el siguiente: ¿Como serelacionan las coordenadas de un punto P en el sistema S con las coordenadas delmismo punto en el sistema S’? y en consecuencia: ¿Que relacion existe entre lasdistancias espaciales y temporales entre dos puntos P y Q medidas en cada uno delos sistemas?.
1..1 Transformaciones de Galileo
Segun hemos supuesto anteriormente, los observadores calibraban sus instrumen-tos cuando se encontraban en reposo relativo. Una suposicion de “sentido comun”
183

184 Capıtulo 5
de la mecanica clasica es que, si los relojes estaban sincronizados y las reglas demedir calibradas cuando los dos sistemas estaban en reposo relativo, lo mismoocurrira cuando se muevan con velocidad relativa v. Segun vemos pues, el proced-imiento clasico de medir -que mas adelante sera sometido a revision- consiste ensuponer que los intervalos espaciales y temporales entre dos puntos son los mis-mos para todos los observadores inerciales de los mismos sucesos. Ello significaque la transformacion que relaciona las coordenadas de un punto en dos sistemasinerciales S y S’ que se mueven con velocidad relativa v es:
x′ = x− vt y′ = y z′ = z t′ = t (1.1)
Estas ecuaciones se conocen como “transformaciones de Galileo”. Segun ellaslos intervalos de longitud y los intervalos de tiempo son absolutos por separado;es decir: son los mismos para todos los observadores inerciales sin que intervengapara nada la velocidad relativa de los sistemas de referencia. Si a esto anadimosla suposicion -tambien de “sentido comun”- de la fısica clasica de que la masade un cuerpo es una cantidad constante e independiente del movimiento de dichocuerpo respecto al observador, podemos concluir que la mecanica clasica y lastransformaciones de Galileo implican que las tres magnitudes fundamentales de lamecanica: masa, longitud y tiempo son independientes de la velocidad relativa delobservador.
1..2 La relatividad de Galileo
Hemos visto como las transformaciones de Galileo relacionaban las coordenadas deun mismo punto en dos sistemas diferentes, inerciales que se movıan con velocidadrelativa v. La relacion existente entre las velocidades y aceleraciones la podemosobtener sin mas que derivar en (1.1).
u′ = u− v a′ = a (1.2)
de forma que la aceleracion de una partıcula es la misma en todos los sistemasinerciales. Puesto que en mecanica clasica la masa no es afectada por el movimientodel sistema, el producto ma sera el mismo para todos los observadores inerciales; sidicho producto se toma como definicion de fuerza -segun la segunda ley de Newton-es obvio que las leyes de la mecanica newtoniana seran las mismas entodos los sistemas inerciales. Una consecuencia importante de lo anterior esque ningun experimento mecanico que se realice dentro de un sistema inercial puedeindicar al observador cual es su velocidad respecto de otro sistema inercial. Porsupuesto, podemos determinar la velocidad relativa de dos sistemas comparandolos datos obtenidos por los dos observadores respecto de un mismo suceso, peroesta velocidad no ha sido obtenida por medidas realizadas en un unico sistema. Encualquier caso no hay ningun procedimiento mecanico que nos permita determinar
Mecanica relativista 185
la velocidad absoluta de un sistema inercial. Este resultado de que solamentepodamos hablar de velocidades relativas de unos sistemas respecto de otros esconocido como relatividad de Newton y fue expresado por el propio Newton enforma de principio en la siguiente forma: El movimiento de los cuerpos enun espacio dado es exactamente igual tanto si el espacio esta en reposocomo si se mueve uniformemente a lo largo de una lınea recta.
2. La mecanica clasica y La electrodinamica
Veamos ahora si el principio de relatividad de Newton es aplicable a otras leyes dela fısica distintas de las de la mecanica -como son las leyes del electromagnetismode Maxwell-. Si el principio de relatividad fuera valido para toda la fısica, entoncesno habrıa ningun sistema inercial privilegiado y ningun tipo de experimento fısicollevado a cabo en un solo sistema inercial podrıa determinar su velocidad de otrosistema inercial. Las ecuaciones del electromagnetismo de Maxwell contienen laconstante c que se identifica en la teorıa con la velocidad de propagacion de unaonda electromagnetica plana en el vacıo. Ahora bien, de acuerdo con las leyes detransformacion de Galileo, habrıa un unico sistema de referencia -que por razoneshistoricas llamaremos eter- en el cual la velocidad de la luz serıa exactamente c.En cualquier otro sistema que se moviera respecto del eter con velocidad rela-tiva v la velocidad de la luz serıa c − v de forma que las ecuaciones de Maxwell,y en consecuencia los procesos electromagneticos, no serıan los mismos para ob-servadores inerciales distintos. A partir de la discusion anterior se plantean tresposibilidades, de las cuales -como siempre- ha de ser el experimento el que decidacual es la correcta. Estas tres posibilidades son:
• 1) Hay un principio de relatividad para la mecanica pero no para la elec-trodinamica. Para la electrodinamica hay un sistema de referencia privilegiado: eleter. Si esta es la alternativa correcta, las transformaciones de Galileo son validasy debemos ser capaces de aplicarlas para localizar el eter experimentalmente.
• 2) Hay un principio de relatividad valido tanto para la mecanica como parala electrodinamica pero las leyes de Maxwell no son correctas. Si esto es asılas transformaciones de Galileo siguen siendo validas y debemos ser capaces dedeterminar experimentalmente desviaciones de las leyes de Maxwell.
• 3) Hay un principio de relatividad valido tanto para la mecanica como para laelectrodinamica pero las leyes de Newton son falsas. En tal caso debemos encontrardesviaciones experimentales de la mecanica newtoniana y reformular las leyes dela mecanica. Si esto es ası las transformaciones correctas no pueden ser las deGalileo pero debera haber unas nuevas transformaciones que sean consistentes conel electromagnetismo y con la nueva mecanica.

186 Capıtulo 5
3. La Teorıa del Eter
3..1 Experimento de Michelson Morley
El experimento mas obvio que cabe realizar es medir la velocidad de la luz en ungran numero de sistemas inerciales para ver si es distinta en los distintos sistemasy especialmente determinar si hay evidencia de que exista un unico sistema -eleter- en el cual la velocidad de la luz sea c.
Si existiera el eter, la tierra -dado que se encuentra en rotacion y giro- semoverıa a traves de el. Un observador terrestre sentirıa un “viento del eter” cuyavelocidad serıa v, siendo v la velocidad orbital de la tierra (alrededor de 30 km/sg).Los experimentos opticos de primer orden en v/c (v/c ∼ 10−4) no son decisivospor lo que es preciso recurrir a experimentos sensibles al segundo orden en v/cpara poder obtener resultados sin ambiguedad. Es decir, los experimentos hande tener una precision de 10−8. A.A. Michelson invento el interferometro opticocuya notable sensibilidad hizo posible el experimento llevado a cabo en 1887 encolaboracion con E.W. Morley. Describimos ahora brevemente el experimento deMichelson y Morley. El interferometro de Michelson esta fijo en la tierra (verfigura). Cuando los espejos M1 y M2 esten formando un angulo aproximadamenterecto, en el telescopio se observara un sistema de franjas paralelas alternativamenteclaras y obscuras segun la interferencia sea constructiva o destructiva.
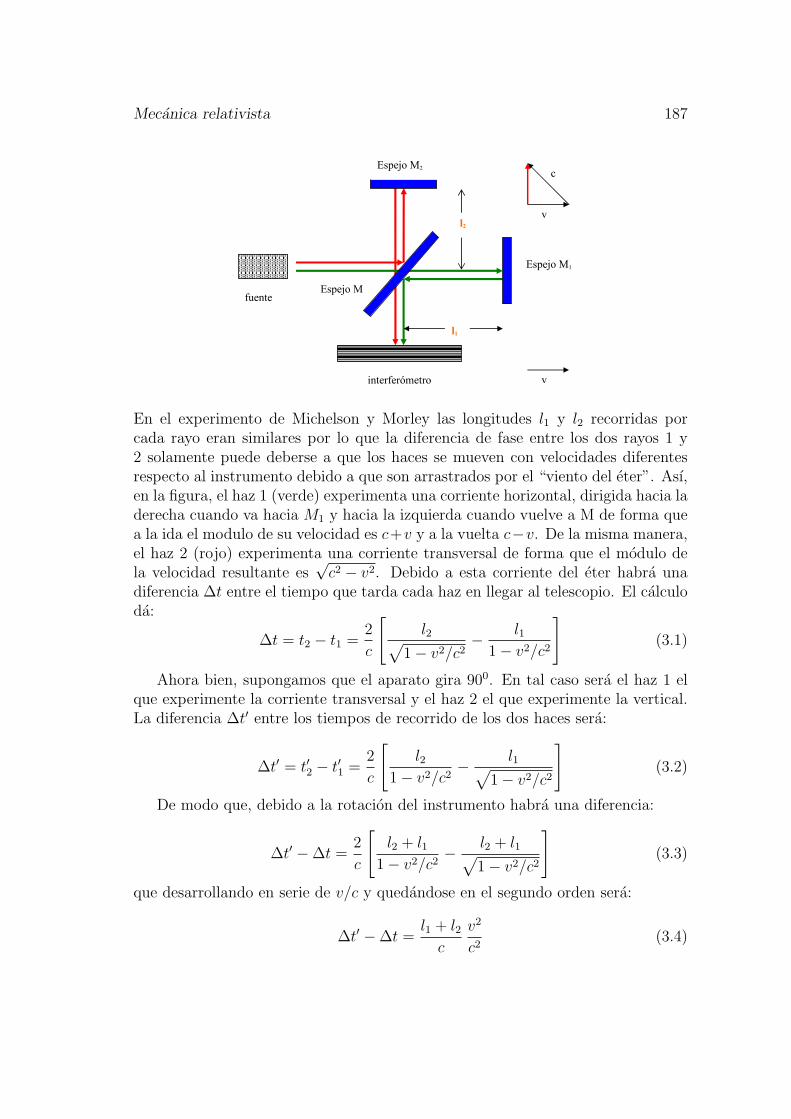
Mecanica relativista 187
En el experimento de Michelson y Morley las longitudes l1 y l2 recorridas porcada rayo eran similares por lo que la diferencia de fase entre los dos rayos 1 y2 solamente puede deberse a que los haces se mueven con velocidades diferentesrespecto al instrumento debido a que son arrastrados por el “viento del eter”. Ası,en la figura, el haz 1 (verde) experimenta una corriente horizontal, dirigida hacia laderecha cuando va hacia M1 y hacia la izquierda cuando vuelve a M de forma quea la ida el modulo de su velocidad es c+v y a la vuelta c−v. De la misma manera,el haz 2 (rojo) experimenta una corriente transversal de forma que el modulo dela velocidad resultante es
√c2 − v2. Debido a esta corriente del eter habra una
diferencia ∆t entre el tiempo que tarda cada haz en llegar al telescopio. El calculoda:
∆t = t2 − t1 =2
c
[l2√
1− v2/c2− l1
1− v2/c2
](3.1)
Ahora bien, supongamos que el aparato gira 900. En tal caso sera el haz 1 elque experimente la corriente transversal y el haz 2 el que experimente la vertical.La diferencia ∆t′ entre los tiempos de recorrido de los dos haces sera:
∆t′ = t′2 − t′1 =2
c
[l2
1− v2/c2− l1√
1− v2/c2
](3.2)
De modo que, debido a la rotacion del instrumento habra una diferencia:
∆t′ −∆t =2
c
[l2 + l1
1− v2/c2− l2 + l1√
1− v2/c2
](3.3)
que desarrollando en serie de v/c y quedandose en el segundo orden sera:
∆t′ −∆t =l1 + l2
c
v2
c2(3.4)

188 Capıtulo 5
Por lo tanto la rotacion del instrumento debe producir un desplazamiento en elsistema de franjas. Sea ∆N el numero de franjas desplazado. Entonces:
∆N =∆t′ −∆t
T' l1 + l2
cT
v2
c2=
l1 + l2λ
v2
c2(3.5)
El experimento de Michelson y Morley se hizo con l1 + l2 = 22m y λ =5, 5.10−7m con lo que ∆N = 0.4; es decir, un desplazamiento de una franja cadacuatrocientas. Los experimentos se realizaron dıa y noche durante un ano y dieroncomo resultado ∆N = 0. No habıa ningun desplazamiento del sistema de franjas.La conclusion mas simple de estos resultados es que la velocidad de la luz es c entodos los sistemas inerciales. No obstante esta conclusion esta -segun vimos- endesacuerdo con las transformaciones de Galileo, que en el siglo XIX parecıan ser devalidez indiscutible. Esta fue la razon por la cual se propusieron varias hipotesisque trataban de explicar el experimento de Michelson y Morley manteniendo lahipotesis del eter.
3..2 Hipotesis de Fitzgerald: Experimento de Kennedy-Thorndike
Fitzgerald propuso en 1892 una hipotesis -elaborada junto con Lorentz- destinadaa explicar el resultado de Michelson y Morley manteniendo el concepto del sistemade referencia privilegiado. Su hipotesis era que: “todos los cuerpos se contraen en
la direccion de su movimiento respecto al eter en un factor√
1− v2
c2”. De acuerdo
con esta hipotesis, en el experimento de Michelson-Morley el haz 1 recorrera unadistancia
l1
√1− v2
c2
y el haz 2
l2
Es facil comprobar que, con esta hipotesis, ∆t = ∆t′ y no cabe pues esperarningun desplazamiento de las franjas cuando el aparato rota. No obstante, noocurre lo mismo cuando las distancias l1 y l2 entre los espejos son distintas. Ental caso, incluso con la hipotesis de Lorentz-Fitzgerald cabe esperar un desplaza-miento en el sistema de franjas. Kennedy y Thorndike repitieron el experimentode Michelson y Morley pero con longitudes l1 y l2 diferentes, pero no se observoningun desplazamiento, en directa contradiccion con la hipotesis de contraccion.

Mecanica relativista 189
3..3 Hipotesis del arrastre del eter: aberracion estelar yexperimento de Fizeau
Otra idea sugerida para “salvar el eter” fue la del arrastre. Esta hipotesis suponıaque el eter estaba ligado a todos los cuerpos de masa finita y que era por tantoarrastrado con ellos. Esta suposicion daba automaticamente resultados nulos enel experimento de Michelson y Morley. Sin embargo existen dos hechos que con-tradicen directamente esta hipotesis: la aberracion estelar y el experimento deFizeau.
• Aberracion estelarImaginemos una estrella situada directamente encima de un telescopio. Si la
tierra estuviera en reposo respecto al eter bastarıa dirigir el telescopio verticalmentehacia ella para verla. Ahora bien, si la tierra se esta moviendo hacia la derecha convelocidad v respecto del eter, hara falta inclinar el tubo del telescopio un anguloα para poder ver la estrella. Esto ultimo es lo que en realidad ocurre como fueobservado por Bradley ya en 1727. Lo que podemos concluir de aquı es que eleter no es arrastrado por la tierra pues en tal caso no serıa necesario inclinar eltelescopio y no habrıa ningun tipo de aberracion.• Experimento de Fizeau
Otro efecto bien establecido que contradice la hipotesis del arrastre de eter se re-fiere a la propagacion de las ondas electromagneticas en los medios en movimiento.El montaje del experimento de Fizeau se muestra esquematicamente en la figura.En el telescopio se observaran franjas de interferencia debidas a los diferentescaminos opticos de cada uno de los haces. El agua fluye a traves de los tubos deforma que uno de los haces viaja siempre con el flujo a favor, y el otro lo hacesiempre con el flujo en contra.
El experimento de Fizeau llevado a cabo en 1851 y repetido por Michelson yMorley en 1886 confirmo plenamente la hipotesis de Fresnel. No parece haber,segun todo lo anterior, una base experimental que sustente la hipotesis del eter

190 Capıtulo 5
como un sistema de referencia privilegiado. Hemos pues de descartar la primerade las hipotesis propuestas y hacer frente a las otras dos restantes.
4. Intentos de modificar el electromagnetismo:
Experimento de De Sitter
Veamos ahora si es posible modificar el electromagnetismo de forma que se expliqueel experimento de Michelson-Morley. Las diversas teorıas a este respecto se llaman“teorıas de emision” y todas ellas se basan en la hipotesis de que la velocidadrelativa de la luz con respecto a la fuente original es c y que esta velocidad esindependiente de la velocidad con que se mueve el medio que transmite la luz. Estasuposicion explica automaticamente los resultados del experimento de Michelson-Morley. Sin embargo, hay dos tipos de experimentos que contradicen estas teorıas:
• El primero son las observaciones de De Sitter acerca de las estrellas binarias.Supongamos dos estrellas binarias girando alrededor de su comun centro de
masa en orbitas circulares. Supongamos ahora que la velocidad de la luz mediantela cual las vemos a traves del espacio vacıo es c + vf donde vf es la componentede la velocidad de la fuente con respecto al observador, en el instante en que laluz es emitida a lo largo de la lınea que una la fuente con el observador. En talcaso el tiempo que tarda la luz en llegar a la tierra es menor cuando la estrellase acerca que cuando se aleja. Como consecuencia las orbitas de las estrellasbinarias, observadas desde la tierra, debe aparecer excentricas. Sin embargo, losexperimentos no muestran tal excentricidad. Es decir, contrariamente a lo supuestoen las teorıas de emision, la velocidad de la luz es independiente del movimientode la fuente.
• Otro experimento es el de Michelson-Morley realizado con una fuente extrater-restre. Si la velocidad de la fuente (debida a los movimientos de traslacion yrotacion respecto del interferometro) afectaran a la velocidad de la luz, deberıanobservarse cambios complicados en el sistema de franjas. Sin embargo estos efectosno han sido observados experimentalmente.
5. Relatividad especial
Hemos visto ya como la hipotesis del eter es insostenible y vemos ahora que lasleyes del electromagnetismo son correctas. La velocidad de la luz es la misma entodos los sistemas de referencia. Hay pues un principio de relatividad, aplicabletanto a la mecanica como al electromagnetismo. Ahora bien, las transformacionesde Galileo deben ser modificadas, y por tanto tambien deben serlo las leyes basicasde la mecanica.

Mecanica relativista 191
5..1 Postulados basicos
En 1905 Einstein publico un artıculo “sobre la electrodinamica de los cuerpos enmovimiento” que iba a dar la solucion del problema. Las suposiciones basicas deEinstein son:
• 1)Principio de Relatividad: Las leyes de la fısica son las mismas en todos lossistemas inerciales. No existe ningun sistema privilegiado.• 2) Principio de constancia de la velocidad de la luz: La velocidad de laluz en el espacio libre es c en todos los sistemas inerciales.
Einstein amplia el principio de relatividad de Newton -que aplicaba solo a lamecanica- para hacerlo extensivo a todas las leyes de la fısica. El principio derelatividad de Einstein establece que no hay ningun tipo de experimento fısicoque pueda determinar la velocidad absoluta de un sistema. Ahora no hay ningunexperimento de ningun tipo realizado por completo dentro de un sistema inercial,que pueda decir al observador cual es su velocidad con respecto a otro sistemainercial. El segundo principio contradice directamente las transformaciones deGalileo que deberan ser reemplazadas por otras consistentes con el. Las nuevasecuaciones de transformacion obtenidas por Einstein son conocidas -por razoneshistoricas- como transformaciones de Lorentz. Del mismo modo las leyes de New-ton de la mecanica deberan modificarse de forma que permanezcan invariantesbajo las transformaciones de Lorentz. Cabe esperar que esta generalizacion sea talque, para velocidades muy inferiores a la de la luz, las nuevas leyes se reduzcan alas antiguas.
5..2 Transformaciones entre sistemas inerciales
Supongamos dos sistemas inerciales moviendose con velocidad relativa v (por co-modidad supondremos que v esta en la direccion x) con coordenadas y tiempos(x, t) y (x′, t′) respectivamente. Si la transformacion entre ambos sistemas es lineal,tendremos
x′ = ax + bt (5.1)
donde a y b son constantes a determinar.
5..3 Transformaciones de Lorentz
Tengamos en cuenta los siguientes puntos
• En el origen del sistema S ′, ha de ser x′ = 0, x = vt. Por tanto
b = −av
x′ = a(x− vt) (5.2)

192 Capıtulo 5
• La transformacion ha de ser invertible, por tanto el paso de S ′ a S ha dehacerse cambiando v por −v
x = a(x′ + vt′) (5.3)
• Un frente de luz se movera en cada uno de los sistemas en la forma
x = ct
x′ = c′t′ (5.4)
De manera que
ct = a(x′ + vt′)
ct′ = a(x− vt) (5.5)
eliminando los tiempos
a2 =cc′
(c− v)(c′ + v)(5.6)
Podemos tener los siguientes casos:
? En mecanica clasica las velocidades se suman por lo que c = c′ + v y portanto a = 1, obteniendo asi las Transformaciones de Galileo.
x′ = x− vt
t′ = t (5.7)
? Sin embargo el postulado de la Relatividad Especial establece que la velocidadde la luz ha de ser igual en todos los sistemas de referencia por lo que c = c′. Ental caso:
a =1√
1− v2
c2
y por tanto las transformaciones entre sistemas inerciales son:
x′ =x− vt√1− v2
c2
t′ =t− v
c2x√
1− v2
c2
(5.8)
conocidas como Transformaciones de Lorentz

Mecanica relativista 193
6. Consecuencias de la Relatividad especial
6..1 Composicion de velocidades
Si en un sistema S un objeto se desplaza un dx en un tiempo dt su velocidad sera:V = dx
dt. En un sistema S ′ se tendra V ′ = dx′
dt′ . Utilizando las transformaciones deLorentz:
V ′ =dx′
dt′=
dx− vdt
dt− vc2
dx=
V dt− vdt
dt− vc2
V dt(6.1)
de manera que las velocidades no se componen aditivamente como en MecanicaClasica sino que:
V ′ =V − v
1− vc2
V(6.2)
que es la ley de composicion de velocidades relativista.
6..2 Dilatacion temporal. Tiempo propio
En Relatividad especial el tiempo no es absoluto sino que transcurre de diferenteforma en cada sistema de referencia. Sin embargo todo objeto fısico tiene asociadoun Tiempo propio τ definido como el tiempo medido en el sistema de refer-encia en que el objeto esta en reposo. Llamemos S ′ a tal sistema de referencia.Cuando transcurre un intervalo de tiempo dt′ = dτ , el objeto permanece en reposopor lo que dx′ = 0. El mismo proceso observado por un observador inercial Smoviendose con velocidad v respecto a S ′ requerira un tiempo dt durante el cual elobjeto se desplazara una distancia dx. Aplicando las transformaciones de Lorentztendremos:
dx′ = 0 =dx− vdt
γ⇒ dx = vdt (6.3)
dt′ = dτ =dt− v
c2dx
γ=
dt− v2
c2dt
γ= γdt (6.4)
Luego
dτ = γdt (6.5)
En consecuencia el tiempo propio es el menor posible; es decir, el sistema dereferencia en el que un objeto esta en reposo es aquel en el que el tiempo transcurremas deprisa. En cualquier otro sistema el tiempo medido es mayor. Este fenomenose conoce como Dilatacion temporal.

194 Capıtulo 5
6..3 Contraccion espacial
Sea S ′ el sistema propio de un objeto, es decir, aquel en que el objeto esta enreposo. Se llama longitud propia del mismo a la longitud medida en el sistemapropio. La longitud propia sera por tanto:
l0 = x′2 − x′1 (6.6)
Para medir la longitud del objeto l = x2 − x1 en otro sistema de referencia S,observaremos los extremos del objeto en el mismo instante de tiempo t2 = t1. Lastransformaciones de Lorentz son:
t′2 − t′1 =− v
c2(x2 − x1)
γ(6.7)
l0 = x′2 − x′1 =(x2 − x1)
γ(6.8)
En consecuencia l = l0γ < l0. La longitud propia de un objeto es la mayorposible. En cualquier otro sistema de referencia la longitud del objeto es menor.Este fenomeno se conoce como Contraccion de longitudes. Observese queesta aparente contraccion del objeto es debida a que mientras en el sistema S losextremos del objeto se calculan en el mismo instante t2 = t1, en el sistema S ′,t′2 − t′1 = − v
c2l0 6= 0.
6..4 Efecto Doppler relativista
Veamos ahora como afecta el movimiento de la fuente a la emision de ondas elec-tromagneticas.• Supongamos una fuente luminosa en reposo en su sistema propio S’ que emiteondas de longitud λ′ y perıodo T ′.
λ
En este sistema, la distancia entre dos frentes de onda que percibe el observadorO’ sera simplemente
λ′ = cT ′

Mecanica relativista 195
y por tanto le corresponde una frecuencia:
ν ′ =c
λ′
• Veamos ahora como percibe el mismo fenomeno un observador O situado en unsistema de referencia S, respecto del cual, S’ se aleja con velocidad v.
λ
El tiempo que transcurre entre la emision de dos frentes de onda sera
T =T ′
γ
mientras que la distancia que el observador O mide entre dos frentes de ondaproporciona una longitud de onda efectiva
λe = λ + D
es decir:λe = cT + vT = (c + v)T
de forma que la comparacion entre la distancia entre frentes de onda en los dossistemas es:
λe = (c + v)T ′
γ=
√c + v
c− v
T ′
c
λe =
√c + v
c− vλ′ > λ′
y en consecuencia
νe =
√c− v
c + vλ′ < ν ′
de forma que la luz aumenta de longitud de onda (desplazamiento hacia el rojo)cuando la fuente se aleja del observador “red shift”. Por el contrario se desplazahacia el azul cuando la fuente se acerca “blueshift”.

196 Capıtulo 5
7. Espacio de Minkovski
7..1 Conservacion del intervalo
Sean dos sucesos (x1, t1) y (x2, t2), en un sistema inercial S. Los mismos sucesosen un sistema S ′ seran (x′1, t
′1) y (x′2, t
′2). Definimos como intervalo s12 entre los
dos sucesos a:s212 = (x2 − x1)
2 − c2(t2 − t1)2 (7.1)
Aplicando las transformaciones de Lorenz, es facil comprobar que:
s′212 = (x′2 − x′1)2 − c2(t′2 − t′1)
2 = (x2 − x1)2 − c2(t2 − t1)
2 = s212 (7.2)
de manera que el intervalo es un invariante bajo las transformaciones deLorentz. El intervalo entre dos sucesos es siempre el mismo con independenciadel sistema de referencia en que se calcule. De la definicion de intervalo se puedededucir que su cuadrado puede ser positivo o negativo. En consecuencia dos sucesospueden estar relacionados por:
? Intervalos de tipo espacioCuando s2
12 > 0 y por tanto (x2 − x1)2 > c2(t2 − t1)
2. En este caso se puedebuscar un sistema de referencia S ′ en el cual los sucesos sean simultaneos y portanto (t′2 − t′1)
2 = 0. Sin embargo no existe ningun sistema en el cual los dossucesos puedan ocurrir en el mismo punto.
? Intervalos de tipo tiempoCuando s2
12 < 0 y por tanto (x2 − x1)2 < c2(t2 − t1)
2. En este caso se puedebuscar un sistema de referencia S ′ en el cual los sucesos puedan ocurrir en el mismopunto y por tanto (x′2−x′1)
2 = 0. Sin embargo no existe ningun sistema en el cuallos dos sucesos puedan ser simultaneos.
? Intervalos de tipo luzCuando s2
12 = 0 y por tanto (x2 − x1)2 = c2(t2 − t1)
2. En este caso ambossucesos estan conectados por un rayo de luz
7..2 Espacio-tiempo cuadridimensional
En Mecanica Clasica el tiempo era absoluto y la geometrıa del espacio tridimensionalera euclıdea de forma que la distancia espacial entre dos puntos se calculaba por elproducto escalar euclıdeo definido positivo.
d212 = (~r2 − ~r1).(~r2 − ~r1) (7.3)
• El Analogo en Relatividad es introducir un espacio-tiempo de cuatro dimensionesen el que el intervalo espacio-temporal entre dos puntos viene dado por elproducto escalar Minkovskiano
s212 = (~r2 − ~r1).(~r2 − ~r1)− c2(t2 − t1)
2 (7.4)

Mecanica relativista 197
que como ya vimos no es definido positivo por lo que divide a los cuadrivectoresdel espacio de Minkowski en tres tipos: pacio y tipo tiempo. Para una dimensionespacial y una temporal, la representacion del espacio de Minkowski se hace atraves del cono de luz representado en la figura.
8. La partıcula libre en relatividad especial
8..1 Lagrangiano relativista de la particula libre
El tratamiento de la interaccion en Mecanica Relativista es un tema complicadoy sujeto a investigacion. Aqui nos restringiremos al caso de la partıcula libre.Consideraremos como masa de una partıcula exclusivamente a la masa en reposoes decir a la medida en el sistema propio de la partıcula en el que esta esta enreposo.
• Lagrangiano de la partıcula libre Sea una partıcula libre de masa m.
Como no actuan fuerzas sobre ella, su sistema propio sera inercial y su tiempopropio un invariante. La accion de la partıcula sera:
A =
∫LRdt (8.1)
Para que la accion sea independiente del sistema de referencia, ha de depender delunico invariante que tenemos: el tiempo propio. Por tanto
A =
∫kdτ (8.2)

198 Capıtulo 5
donde k es una constante. Puesto que dτ = γdt, tenemos que:
LRdt = kγdt ⇒ LR = k
√1− v2
c2(8.3)
Para obtener k, hemos de tener en cuenta que en el lımite clasico vc→ 0, LR
debe tender (salvo constantes aditivas irrelevantes) al lagrangiano clasico de lapartıcula libre LC = 1
2mv2. Desarrollando LR en serie de v
c:
LR → k
(1− 1
2
v2
c2
)(8.4)
Comparando con LC
−k
2
v2
c2=
1
2mv2 (8.5)
de manera quek = −mc2 (8.6)
y por tanto el lagrangiano relativista de una partıcula libre de masa m en unsistema de referencia en el que se mueve con velocidad v es:
LR = −mc2
√1− v2
c2(8.7)
8..2 Momento
Momento de la partıcula libre Definimos el momento en la forma habitual
p =∂LR
∂v=
mv√1− v2
c2
(8.8)
Es importante que esta cantidad solo esta bien definida para partıculas cuya ve-locidad no es la de la luz. Para que la expresion no diverja cuando v = c, esnecesario que el numerador sea tambien cero. Tenemos pues que distinguir los doscasos siguientes:
? Una partıcula que se mueve a la velocidad de la luz tiene masa en reposocero y viceversa: Si una partıcula tiene masa cero, se mueve a la velocidad de laluz. Aunque la masa sea cero, el momento no es cero (su valor se determina enMecanica Cuantica).
? Toda partıcula con masa distinta de cero se mueve a una velocidad v inferiora la de la luz y su momento viene dado por:
p =mv√1− v2
c2
(8.9)

Mecanica relativista 199
o bien, despejando la velocidad:
v =pc√
p2 + m2c2(8.10)
8..3 Hamiltoniano relativista de la particula libre
La transformacion de Legendre proporciona:
H = pv − L =p2c√
p2 + m2c2+ mc2
√1− p2
p2 + m2c2(8.11)
operandoH =
√p2c2 + m2c4 (8.12)
que es la Energıa de una partıcula libre.
8..4 Partıculas con masa: Energıa en reposo
Si una partıcula tiene masa distinta de cero, siempre se puede encontrar un sistemade referencia en el que este en reposo. En tal sistema propio v = p = 0 y por tantola energıa es:
Erep = mc2 (8.13)
que no es debida al movimiento sino solamente a la masa de la partıcula. Esteresultado no tiene equivalente en Mecanica Clasica.
Cuando la partıcula esta en un sistema en el que se mueve con velocidad v, suenergıa es:
E =√
p2c2 + m2c4 =mc2
√1− v2
c2
(8.14)
de la cual, para obtener la energıa cinetica exclusivamente debida al movimiento,hay que descontar la energıa en reposo de forma que:
T = mc2
1√
1− v2
c2
− 1
(8.15)
8..5 Energıa de las partıculas sin masa
Por el contrario, para una partıcula sin masa y que por tanto se mueve a lavelocidad de la luz, la energıa es exclusivamente debida a su momento:
E = pc (8.16)

200 Capıtulo 5
9. Interacciones relativistas
La interaccion elastica de dos partıculas relativistas que pueden considerarselibres en las zonas alejadas a la interaccion vendra dada por la conservacion delmomento y la energıa. A este respecto, recordemos las siguientes definiciones parapartıculas libres relativistas:
• momento lineal (de una partıcula con masa):
~p =m~v√1− v2
c2
(9.1)
• energıa de la partıcula libre:
E =√
m2c4 + ~p2c2 (9.2)
y veamos a continuacion algunos ejemplos
9..1 Efecto Compton
Es la colision de fotones (masa cero) con electrones (masa m)

Mecanica relativista 201
θ
ϕ
• Conservacion del momento
Sea ~p el momento del foton incidente y ~p′ el del saliente. ~q es el momento delelectron. Si suponemos ~p dirigido en la direccion x, θ es el angulo que ~p′ formacon el eje x y ϕ el que forma ~q. De manera que
p = p′ cos θ + q cos ϕ (9.3)
0 = p′ sin θ − q sin ϕ (9.4)
• Conservacion de la energıa
pc + mc2 = p′c +√
m2c4 + q2c2 (9.5)
Los datos del problema son p y p′ y en funcion de ellos hemos de determinar θ.Eliminando q y ϕ de (9.3) y (9.4)
q2 = (p− p′ cos θ)2 + p′2 sin2 θ = p2 + p′2 − 2pp′ cos θ (9.6)
tanθ =p′ sin θ
p− p′ cos θ(9.7)
substituyendo en (9.5)
pc− p′c + mec2 =
√m2
ec4 + p2c2 + p′2c2 − 2pp′ cos θc2
de donde
1− cos θ =mec(p− p′)
pp′
La cantidadλ0 = ~mec
= 0.0243x10−10m se denomina longitud de onda Comp-ton
∆λ =0 (1− cos θ)

202 Capıtulo 5
9..2 Efecto Fotoelectrico
Se trata de un caso de choque inelastico en el que un elctron de un metal ab-sorbe la energıa de un foton para vencer su energıa de enlace y escapar del metalproduciendo una corriente electrica.
Si ~p es el momento del foton y ~q el del electron emergente, tendremos
~p = ~q (9.8)
Por otro lado si W es la energıa de enlace del electron en el metal el balanceenergetico es:
pc + mec2 = W +
√m2
ec4 + q2c2 (9.9)
Observese que para que haya corriente la energıa mınima del foton ha de ser
pc > W
9..3 Emision de fotones
Un nucleo en reposo de masa m se transforma en otro de masa m′ con momento~q emitiendo un foton de momento ~p

Mecanica relativista 203
~p + ~q = 0 (9.10)
mc2 = pc +√
m′2c4 + q2c2 (9.11)
de forma que la energıa del foton saliente es:
pc =m2 −m′2
2mc2 (9.12)
9..4 Absorcion de fotones
Supongamos un nucleo en reposo de masa m que asorbe la energıa de un foton demomento ~p y se trasforma en otro nucleo de masa m′ con momento ~q.
El balance es:~p = ~q (9.13)
mc2 + pc =√
m′2c4 + q2c2 (9.14)
De donde obtenemos
p = q =m′2 −m2
2mc (9.15)
y por tanto la velocidad de retroceso del nucleo es:
q =m′2 −m2
2mc =
m′v√1− v2
c2
(9.16)
204 Capıtulo 5
10. Problemas
Enunciados
1) Un hombre que viaja en un tren a una velocidad de 20 m/sg enciende doscigarrillos con un intervalo de 10 minutos. ¿Como verıa estos sucesos un observadorsituado en tierra?
2) Supongamos ahora que el vagon del problema anterior. Un observador en eltren ve que dos pasajeros situados uno en cada extemo del vagon encienden a lavez un cigarrillo. ¿Como vera el suceso el observador situado en tierra?
3) Visto desde un sistema inercial, un suceso ocurre en un punto A del eje x y10−6 sg mas tarde ocurre otro en un punto B situado a 600 m. ¿Existe algunsistema en el que sucesos sean simultaneos?
4) ¿Cual es el intervalo entre dos sucesos que en un sistema inerciala) Estan separados 109 m y transcurren con un intervalo temporal de 5 sga) Estan separados 7.5 108m y transcurren con un intervalo temporal de 2.5 sga) Estan separados 5 108m y transcurren con un intervalo temporal de 1.5 sg
5) Un cohete cuya longitud en reposo es de 60 m se aleja de la tierra con velocidadv. El cohete tiene espejos en cada extremo. Cuando se encuentra a una distanciaD de la tierra se envıa desde esta un rayo de luz que se refleja en los espejos. Laprimera senal se recibe en la tierra al cabo de 20 sg y la segunda 1, 64 µsg mastarde. Calcular v y D.
6) Una varilla de 1 m forma un angulo de 45 grados con respecto a la direcciondel movimiento de un sistema que se mueve con velocidad 0.8 c respecto de unobservador inercial. ¿Cual es la longitud y orientacion de la varilla para esteobservador?.
7) La radiacion cosmica de alta energıa proporciona muones en las capas altas dela atmosfera. La vida media del muon es 2, 1994.10−6sg. Determinar la velocidadmınima de los muones si, produciendose a una altura de 32Km se pueden detectarsobre la superficie de la tierra.
8) Los astronautas de una nave espacial que se aleja de la tierra a v = 0.6cinterrumpen su conexion con el control espacial diciendo que se van a dormir unasiesta de una hora y que luego volveran a llamar. ¿Cual es la duracion de la siestapara los controladres de la tierra?.
9) Dos naves espaciales de 100 m de longitud viajan una hacia la otra con veloci-dades de 0,85 c relativas a la tierra
a) ¿Que longitud tiene cada nave medida desde la tierraa) ¿Que velocidad tiene cada nave medida desde la otra navea) ¿Que longitud tiene cada nave medida desde la otra nave

Mecanica relativista 205
10) La longitud de onda mas larga emitida por el hidrogeno en la serie de Balmeres λ0 = 656 nm. En la luz procedente de una galaxia lejana, el valor medido esλ = 1458 nm. Hallar la velocidad de alejamiento de la galaxia.
11) En un determinado sistema de unidades la energıa relativista de una partıculaes 1. Si su energıa en reposo es 1
2, calcular su momento y su velocidad. (En este
sistema de unidades la velocidad de la luz es c = 1).
12) En un cierto sistema de referencia inercial se emiten dos pulsos de luz a unadistancia de 5 Km entre sı y con un intervalo temporal de 10−6 sg. Un observadorque viaja con una velocidad relativa v paralelo a la lınea que une los puntos dondese emitieron los pulsos, nota que los pulsos son simultaneos. Hallar v.
13) Una partıcula de masa en reposo mc2 = 1 MeV y energıa cinetica 2 MeVchoca con una masa estacionaria de energıa en reposo 2 MeV . Despues de lacolision las partıculas quedan adheridas. Hallar la velocidad inicial de la partıculaantes del choque y la masa y la velocidad de la partıcula resultante
14) Un profesor de Fısica en la tierra realiza un examen a sus alumnos que estan enuna nave espacial que viaja a una velocidad v relativa a la tierra. En el momentoen que la nave espacial pasa al lado del profesor, este da la senal para empezarel examen. El profesor quiere que sus alumnos dispongan de un tiempo T0 paracompletar el examen. Demostrar que el profesor debera mandar una senal luminosaindicando el fin del examen al cabo de un tiempo (en su sistema de referencia)
t = T0
√c−vc+v
desde que empezo el examen

206 Capıtulo 5
1) Un hombre que viaja en un tren a una velocidad de 20 m/sg enciende doscigarrillos con un intervalo de 10 minutos. ¿Como verıa estos sucesos un observadorsituado en tierra?
Solucion
a) Transformaciones de GalileoTeniendo en cuenta que para el observador que viaja en el tren x′1 = x′2 y t′2− t′1 =600 sg. Segun las transformaciones de Galileo
x′1 = x1 − vt1, t′1 = t1,
x′2 = x2 − vt2, t′2 = t2
y por lo tanto para un observador situado en tierra
t2 − t1 = t′2 − t′1 = 600 sg
x2 − x1 = x′2 − x′1 + v(t2 − t1) = 12 km
b) Transformaciones de Lorentz
En este caso
x′1 =x1 − vt1
γ, t′1 =
t1 − vc2
x1
γ,
x′2 =x2 − vt2
γ, t′2 =
t2 − vc2
x2
γ
siendo
γ =
√1− v2
c2
Por lo tanto
t2 − t1 = γ(t′2 − t′1) +v
c2(x2 − x1),
x2 − x1 = γ(x′2 − x′1) + v(t2 − t1) = v(t2 − t1)
Combinando ambas ecuaciones
t2 − t1 =t′2 − t′1
γ> 600 sg
x2 − x1 = v(t2 − t1) > 12 km

Mecanica relativista 207
2) Supongamos ahora que el vagon del problema anterior. Un observador en eltren ve que dos pasajeros situados uno en cada extemo del vagon encienden a lavez un cigarrillo. ¿Como vera el suceso el observador situado en tierra?
Solucion
Sea a la longitud del vagon. El observador en el ve que los dos pasajeros enciendenel cigarrillo al mismo tiempo, de manera que t′2 − t′1 = 0 y x′2 − x′1 = a.a) Transformaciones de Galileo
Las transformaciones de Galileo son
x′1 = x1 − vt1, t′1 = t1,
x′2 = x2 − vt2, t′2 = t2
y por lo tanto para un observador situado en tierra
t2 − t1 = t′2 − t′1 = 0
x2 − x1 = x′2 − x′1 + v(t2 − t1) = x′2 − x′1 = a
b) Transformaciones de Lorentz
En este caso
x′1 =x1 − vt1
γ, t′1 =
t1 − vc2
x1
γ,
x′2 =x2 − vt2
γ, t′2 =
t2 − vc2
x2
γ
siendo
γ =
√1− v2
c2
Por lo tanto
t2 − t1 = γ(t′2 − t′1) +v
c2(x2 − x1) =
v
c2(x2 − x1),
x2 − x1 = γ(x′2 − x′1) + v(t2 − t1)
Combinando ambas ecuaciones
x2 − x1 =x′2 − x′1
γ=
a
γ> a
t2 − t1 =v
c2
a
γ6= 0

208 Capıtulo 5
3) Visto desde un sistema inercial, un suceso ocurre en un punto A del eje x y10−6 sg mas tarde ocurre otro en un punto B situado a 600 m. ¿Existe algunsistema en el que sucesos sean simultaneos?
Solucion
El intervalo se define a partir de
s212 = (x′2 − x′1)
2 − c2(t′2 − t′1)2 = (x2 − x1)
2 − c2(t2 − t1)2
En el sistema S, tenemos que
x2 − x1 = 600 m t2 − t1 = 10−6 sg
luego el intervalo sera
s212 = 6002 − 9 104 = 27 104 > 0
Se trata por lo tanto de un intervalo de tipo espacio y es posible encontrar unsistema en el cual dichos sucesos sean simultaneos, es decir
t′2 − t′1 = 0
Segun esto, se debera verificar
t2 − t1 =v
c2(x2 − x1)
y por tanto, la velocidad del sistema S ′ respecto de S sera
v = c2 t2 − t1x2 − x1
= c3. 108. 10−6
6. 102=
c
2

Mecanica relativista 209
4) ¿Cual es el intervalo entre dos sucesos que en un sistema inerciala) Estan separados 109 m y transcurren con un intervalo temporal de 5 sga) Estan separados 7.5 108m y transcurren con un intervalo temporal de 2.5 sga) Estan separados 5 108m y transcurren con un intervalo temporal de 1.5 sg
Solucion
Como vimos en teorıa el intervalo es un invariante bajo las transformaciones deLorentz, por lo tanto podemos calcular su valor a partir de los datos del problema.
a) s212 = 1018 − 25. 9. 1016 = −125. 1016 < 0luego se trata de un intervalo de tipo tiempo.
b) s212 = (7, 5)2. 1016 − (2, 5)2. 9. 1016 = 0
luego se trata de un intervalo de tipo luz.
c) s212 = 25. 1018 − (1, 5)2. 9. 1016 = 24, 78. 1018 > 0luego se trata de un intervalo de tipo espacio.

210 Capıtulo 5
5) Un cohete cuya longitud en reposo es de 60 m se aleja de la tierra con velocidadv. El cohete tiene espejos en cada extremo. Cuando se encuentra a una distanciaD de la tierra se envıa desde esta un rayo de luz que se refleja en los espejos. Laprimera senal se recibe en la tierra al cabo de 20 sg y la segunda 1, 64 µsg mastarde. Calcular v y D.
Solucion
Sea t1 el tiempo (en la tierra) que tarda la luz en llegar hasta el primer espejo
t1 = 10 sg
y sea t2 el tiempo que tarda la luz en llegar hasta el segundo espejo
t2 = (10 + 0, 82. 10−6) sg
Segun esto en el tiempot2 − t1 = 0, 82. 10−6 sg
la luz recorrera la longitud del cohete mas la distancia que el techo del cohete sehaya desplazado en dicho tiempo. Ademas deberemos tener en cuenta que, puestoque las medidas se deberan hacer en el sistema en el que el cohete se mueve,la longitud del cohete sera menor que la que tiene si estuviera en reposo. Por lotanto, como la longitud del cohete cuando este se encuentra en reposo es l0 = 60 m,tendremos
c(t2 − t1) = l0
√1− v2
c2+ v(t2 − t1)
es decir, (c(t2 − t1)
l0
)2 (1− v
c
)=
(1 +
v
c
)
Teniendo ya en cuenta los datos del problema,(
c(t2 − t1)
l0
)=
3. 108.0, 82. 10−6
60= 4, 1
Con lo cual obtenemos la velocidad v
v = 0, 89 c
Para determinar la distancia D a la que se encuentra el cohete de la tierra, ten-dremos en cuenta que la distancia recorrida por la luz en el tiempo t1 sera igual aD mas lo que se haya desplazado el cohete en ese tiempo, esto es
ct1 = D + vt1
y como consecuencia
D = t1c(1− v
c
)= 3, 3. 108 m

Mecanica relativista 211
6) Una varilla de 1 m forma un angulo de 45 grados con respecto a la direcciondel movimiento de un sistema que se mueve con velocidad 0.8 c respecto de unobservador inercial. ¿Cual es la longitud y orientacion de la varilla para esteobservador?.
Solucion
Sea S el sistema en el cual la varilla esta en reposo. En dicho sistema se tiene quela longitud l de la varilla es l = 1 m. Como ademas esta formando un angulo de45 grados. Sean lx y ly las componentes de la longitud de la varilla. Entonces,
lylx
= 1
y por lo tanto
lx = ly =1√2
En el sistema S ′ que se mueve con velocidad 0, 8 c en la direccion x, la longitud lyno variara por ser perpendicular a la direccion del movimiento, pero la longitud lxse acortara
l′y = ly =1√2,
l′x = lx
√1− v2
c2= 0, 6 lx
Por lo tanto la longitud de la varilla en el sistema S ′ sera
l′2 = l′2x + l′2y = 0.36 l2x + l2y = 0, 68
es decirl′ = 0, 82 m
En cuanto a la orientacion medida en el sistema de laboratorio
tg ϕ′ =l′yl′x
=1
0, 6= 1, 6
es decirϕ′ = 65, 6 grad

212 Capıtulo 5
7) La radiacion cosmica de alta energıa proporciona muones en las capas altas dela atmosfera. La vida media del muon es 2, 1994.10−6sg. Determinar la velocidadmınima de los muones si, produciendose a una altura de 32Km se pueden detectarsobre la suerficie de la tierra.
Solucion
Si consideramos el problema desde un punto de vista clasico, para poder detectarlosantes de que se produzca su desintegracion, la velocidad mınima necesaria sera v
v
c=
s
τ0c=
32. 103
2, 1994. 10−6. 3. 108= 48, 5
siendo s la altura sobre la superficie de la tierra a la que se producen los muonesy τ0 la vida media.
Sin embargo, τ0 es el tiempo medido en el sistema S0 en el que los muonesestan en reposo, mientras que en el sistema S en que nosotros medimos se aleja deel con velocidad v. Por lo tanto, la vida media sera
τ0 = τ
√1− v2
c2
Por lo tanto la velocidad para que se observen en la tierra antes de su desintegracionsera
v =s
τ=
s
τ0
√1− v2
c2
Despejando vc
de la expresion anterior y sustituyendo los datos obtenemos
v
c= 0, 9998

Mecanica relativista 213
8) Los astronautas de una nave espacial que se aleja de la tierra a v = 0.6cinterrumpen su conexion con el control espacial diciendo que se van a dorir unasiesta de una hora y que luego volveran a llamar. ¿Cual es la duracion de la siestapara los controladres de la tierra?.
Solucion
Para los astronautas la siesta transcurre en su sistema propio en el que estanen reposo. En el sistema de la tierra sin embargo, los astronautas se habrandesplazado un tiempo considerable mientras dura la tierra por lo que el tiempotranscurrido sera mayor en un factor 1
γ. En nuestro caso
γ =√
1− 0.36 = 0.8
de forma que
t =t′
γ= 75 min

214 Capıtulo 5
9) Dos naves espaciales de 100 m de longitud viajan una hacia la otra con veloci-dades de 0,85 c relativas a la tierra
a) ¿Que longitud tiene cada nave medida desde la tierraa) ¿Que velocidad tiene cada nave medida desde la otra navea) ¿Que longitud tiene cada nave medida desde la otra nave
Solucion
Llamemos S al sistema de referencia propio de la tierra, S ′ y S ′′ a los sistemas dereferencia propios de las naves 1 y 2 respectivamente
Respecto de S la nave 1 se mueve con velocidad u1 = v y la nave 2 con velocidadu2 = −v
a) La longitud de cada nave respecto de la tierra es la longitud propia multi-plicada por γ
La longitud propia de la nave 1 se medira en el sistema S ′ y sera l0 = l′. En el
sistema de referencia S tendremos l =√
1− v2
c2l0 = 52.7 m
b) Utilizando la ley de composicion de velocidades En el sistema de referencia Sla velocidad de la tierra sera VT = 0, la velocidad de la nave 2 sera u2 − v y la lavelocidad de la nave 1 u1 = v
VT = 0
u1 = v
u2 = −v
En el sistema de referencia S ′ la velocidad de la nave 2 sera u′2 y la velocidadde la tierra sera V ′
T = −v y la velocidad de la nave 1 u′1 = 0La ley de composicion de velocidades nos proporciona
V ′T =
VT − v
1− VT vc2
= 0 = −v
u′1 =u1 − v
1− u1vc2
= 0
u′2 =u2 − v
1− u2vc2
=−2v
1 + v2
c2
= −0.987c
c) Utilizando la velocidad anteriorRspecto del sistema S ′, el sistema S ′′ se esta moviendo con velocidad u′2 =
−0.987c y por tanto
l′′ = l0
√1−
(u′2c
)2
= 16.1m

Mecanica relativista 215
10) La longitud de onda mas larga emitida por el hidrogeno en la serie de Balmeres λ0 = 656 nm. En la luz procedente de una galaxia lejana, el valor medido esλ = 1458 nm. Hallar la velocidad de alejamiento de la galaxia.
Solucion
Como
λ =
√c + v
c− vλ0
c + v =λ2
λ20
(c− v)
v
c=
λ2
λ20− 1
λ2
λ20
+ 1= 0.664
11) ¿Con que velocidad debe acercarse un coche a un semaforo en rojo (650 nm)para verlo verde (535 nm).
Solucion
Como
λ =
√c + v
c− vλ0
c + v =λ2
λ20
(c− v)
v
c=
λ2
λ20− 1
λ2
λ20
+ 1= −0.21

216 Capıtulo 5
11) En un cierto sistema de referencia inercial se emiten dos pulsos de luz a unadistancia de 5 Km entre sı y con un intervalo temporal de 10−6 sg. Un observadorque viaja con una velocidad relativa v paralelo a la lınea que une los puntos dondese emitieron los pulsos, nota que los pulsos son simultaneos. Hallar v.
Solucion
Sea S el sistema de referencia en el que se emiten los pulsos. En el x2−x1 = 5 103 my t2 − t1 = 10−6 sg. El intervalo sera
s212 = (x2 − x1)
2 − c2(t2 − t1)2 = 249, 1. 105 m2
Es un intervalo de tipo espacio y por tanto sera posible encontrar un sistema dereferencia S ′ en el cual ambos sucesos sean simultaneos, es decir, t′2 = t′1. Debidoa que el intervalo es invariante bajo las transformaciones de Lorentz,
s′212 = (x′2 − x′1)2 = 249, 1. 105 m2
y por lo tanto la distancia entre ambos sucesos en el sistema S ′ sera
x′2 − x′1 = 4990, 99 m
Teniendo en cuenta que
t′ =t− v
c2x
γ
y que t′2 = t′1, obtenemosv
c= c
t2 − t1x2 − x1
= 0, 06

Mecanica relativista 217
12) En un determinado sistema de unidades la energıa relativista de una partıculaes 1. Si su energıa en reposo es 1
2, calcular su momento y su velocidad. (En este
sistema de unidades la velocidad de la luz es c = 1).
Solucion
La energıa de una partıcula libre viene dada mediante la expresion
E =√
p2c2 + m2c4 = 1
mientras que la energıa en reposo es
Erep = mc2 =1
2
Por lo tanto tendremos que
pc =√
E2 − (mc2)2 =
√1− 1
4=
√3
2
La velocidad de la partıcula sera
v =pc√
p2c2 + m2c4=
√3
2

218 Capıtulo 5
13) Una partıcula de masa en reposo mc2 = 1 MeV y energıa cinetica 2 MeVchoca con una masa estacionaria de energıa en reposo 2 MeV . Despues de lacolision las partıculas quedan adheridas. Hallar la velocidad inicial de la partıculaantes del choque y la masa y la velocidad de la partıcula resultante
Solucion
• Seam1c
2 = 1Mev, T1 = 2MeV
En tal casoE1 = T1 + m1c
2 = 3MeV
y
p1c =√
E21 −m2
1c4 =
√8MeV
de forma quev1
c=
p1c
E1
=
√8
3
• Por otra parte sim2c
2 = 2MeV
entonces
p2 = 0, E2 = 2MeV
• Por tanto el momento inicial del sistema es debido solo a la partıcula 1
pic = p1c =√
8MeV
mientras que la energıa
Ei = E1 + E2 = 5MeV
• Despues de la colision, la masa de la partıcula resultante serıa m3, su momentop3 y su energıa: E3 =
√p2
3c2 + m2
3c4 La conservacion de momentos y energıas nos
proporcionapi = p3 =⇒ p3c =
√8Mev
Ei = E3 =⇒ 5 =√
16 + m23c
4 =⇒ m3c2 =
√17MeV
y en cuanto a la velocidad de la partıcula saliente
v3
c=
p3c
E3
=
√8
5

Mecanica relativista 219
14) Un profesor de Fısica en la tierra realiza un examen a sus alumnos que estan enuna nave espacial que viaja a una velocidad v relativa a la tierra. En el momentoen que la nave espacial pasa al lado del profesor, este da la senal para empezarel examen. El profesor quiere que sus alumnos dispongan de un tiempo T0 paracompletar el examen. Demostrar que el profesor debera mandar una senal luminosaindicando el fin del examen al cabo de un tiempo (en su sistema de referencia)
t = T0
√c−vc+v
desde que empezo el examen
Solucion
Sea S el sistema de referencia del profesor y S’ el de los alumnos
• Sea el suceso 1 el correspondiente al inicio del examen cuando los dos sistemasse encuentran con su origen comun. Por tanto
x1 = 0, t1 = 0
x′1 = 0, t′1 = 0
• Sea el suceso 2 el correspondiente al final del examen. En tal caso para losalumnos el tiempo transcurrido es T0 y siguen encontrandose en el origen desu sistema de referencia. Por tanto
x′2 = 0, t′2 = T0
t2 =T0
γ, x2 = vt2 =
vT0
γ,
• Sea t el tiempo transcurrido en el sistema S hasta que se embia la seal deacabar el examen. En ese sistema, la seal luminosa debe recorrer la distanciax2 en un tiempo t2 − t. Por tanto
x2 = c(t2 − t) ⇒ vT0
γ= c
T0
γ− ct
despejando t
t = T0
√c− v
c + v
220 Capıtulo 5
Bibliografıa
[1] French A.P., Newtonian Mechanics, The M.I.T Introductory Physics series.W. W. Norton and Company, Bilbao, (1960)
[2] Goldstein H. Mecanica Clasica, Aguilar, (1970)
[3] Halpern A., 3000 solved problems in physics, Schaum’s solved problem series,Mc. Graw Hill, (1988)
[4] Holton G., Introduccion a los conceptos y teorıas de las ciencias fısicas, Re-verte (Barcelona), (1964)
[5] Kible T.W.B., Mecanica Clasica, URMO, Bilbao, (1974)
[6] Landau L.D. & Lifshitz E.M., Mecanica, Reverte, (Barcelona), (1978)
[7] Perez Garcıa V., Vazquez Martınez L. y Fdez. Ranada A.100 Problemas deMecanica, Alianza editorial, Madrid, (1997)
[8] Fernandez Ranada A., Dinamica Clasica, Alianza editorial, Madrid, (1990)
[9] Fernandez Ranada A., Fısica Basica, Alianza editorial, Madrid, (1990)
[10] Resnick R., Introduccion a la Teorıa Especial de la Relatividad , LIMUSA,Mexico, (1977)
[11] Resnick R. & and Halliday D., Fısica, Companıa editorial continental S.A.(Mejico) (1973)
221


















