
ME 274 – Spring 2021 – Krousgrill sections Exam 3 ...
15
ME 274 – Spring 2021 – Krousgrill sections Exam 3 – Wednesday, April 14 8:00-9:30 PM (alternate time: 8:00-9:30 AM) Topics covered: • Work/energy equation for particles (Section 4.B of the lecture book) • Linear impulse/momentum equation for particles (Section 4.C of the lecture book) • Impact of particles (Section 4.C of the lecture book) • Angular impulse/momentum equation for particles (Section 4.D of the lecture book) • Newton/Euler equations for rigid bodies (Section 5.A of the lecture book) • Work/energy equation for rigid bodies (Section 5.B of the lecture book) Preparation: It is very important that you review the fundamentals on these topics prior to working lots of examples. Attached are the lecture summary sheets for the topics covered on this exam. Go over these in detail, and make note of things that are not clear. Contact your instructor for help on those topics. Once you have reviewed the fundamentals, then use the learning resources available to you: • Solution videos for all example problems from the lecture book are found on the blog. • Solution videos for all homework problems are found on the blog. • Solutions for all quizzes given this semester are found on the blog. • Hints for all conceptual questions are found on the blog. • Pre-lecture and lecture videos for all sections (including Professor Davies’ and Gibert’s sections) are found on the blog. • The Weekly Joys website can provide you with a large number of exams (w/ solutions) from past semesters. Use these last, only after you have reviewed all other material. • Recommendation: Hold back one or two sample exams. Take these exams under the pressure of time limits. Quit at the end of 90 minutes, and review your work. Take note of problems that took you a long time to think through. Identify any weaknesses you have at this point. Do not wait until the exam to find out where you may need some help. • Contact your instructor if you need help.
Transcript of ME 274 – Spring 2021 – Krousgrill sections Exam 3 ...

ME 274 – Spring 2021 – Krousgrill sections Exam 3 – Wednesday, April 14
8:00-9:30 PM (alternate time: 8:00-9:30 AM) Topicscovered:
• Work/energyequationforparticles(Section4.Bofthelecturebook)• Linearimpulse/momentumequationforparticles(Section4.Cofthelecture
book)• Impactofparticles(Section4.Cofthelecturebook)• Angularimpulse/momentumequationforparticles(Section4.Dofthe
lecturebook)• Newton/Eulerequationsforrigidbodies(Section5.Aofthelecturebook)• Work/energyequationforrigidbodies(Section5.Bofthelecturebook)
Preparation:Itisveryimportantthatyoureviewthefundamentalsonthesetopicspriortoworkinglotsofexamples.Attachedarethelecturesummarysheetsforthetopicscoveredonthisexam.Goovertheseindetail,andmakenoteofthingsthatarenotclear.Contactyourinstructorforhelponthosetopics.Onceyouhavereviewedthefundamentals,thenusethelearningresourcesavailabletoyou:
• Solutionvideosforallexampleproblemsfromthelecturebookarefoundontheblog.
• Solutionvideosforallhomeworkproblemsarefoundontheblog.
• Solutionsforallquizzesgiventhissemesterarefoundontheblog.
• Hintsforallconceptualquestionsarefoundontheblog.
• Pre-lectureandlecturevideosforallsections(includingProfessorDavies’andGibert’ssections)arefoundontheblog.
• TheWeeklyJoyswebsitecanprovideyouwithalargenumberofexams(w/solutions)frompastsemesters.Usetheselast,onlyafteryouhavereviewedallothermaterial.
• Recommendation:Holdbackoneortwosampleexams.Taketheseexamsunderthepressureoftimelimits.Quitattheendof90minutes,andreviewyourwork.Takenoteofproblemsthattookyoualongtimetothinkthrough.Identifyanyweaknessesyouhaveatthispoint.Donotwaituntiltheexamtofindoutwhereyoumayneedsomehelp.
• Contactyourinstructorifyouneedhelp.

Kinetics: Four-Step Problem Solving Method
The suggested plan of action for solving kinetics problems:
1. Free body diagram(s). Draw appropriate free body diagrams (FBDs) for the problem. Yourchoice of FBDs is problem dependent. For some problems, you will draw an FBD for eachbody; for others, you will draw an FBD for the entire system. An integral part of your FBDsis your choice of coordinate systems. For each FBD, draw the unit vectors corresponding toyour coordinate choice.
2. Kinetics equations. At this point, you will need to choose what solution method(s) thatyou will need to use for the particular problem at hand. In this section of the course wewill study four basic methods: Newton/Euler, work/energy, linear impulse/momentum andangular impulse/momentum. Based on your choice of method(s), write down the appropriateequations from your FBD(s) from Step 1.
3. Kinematics. Perform the needed kinematic analysis. A study of the equations in Step 2above will guide you in deciding what kinematics are needed to find a solution to the problem.
4. Solve . Count the number of unknowns and the number of equations from above. If you donot have enough equations to solve for your unknowns, then you either: (i) need to drawmore FBDs, OR (ii) need to do more kinematic analysis. When you have su�cient equationsfor the number of unknowns, solve for the desired unknowns from the above equations.
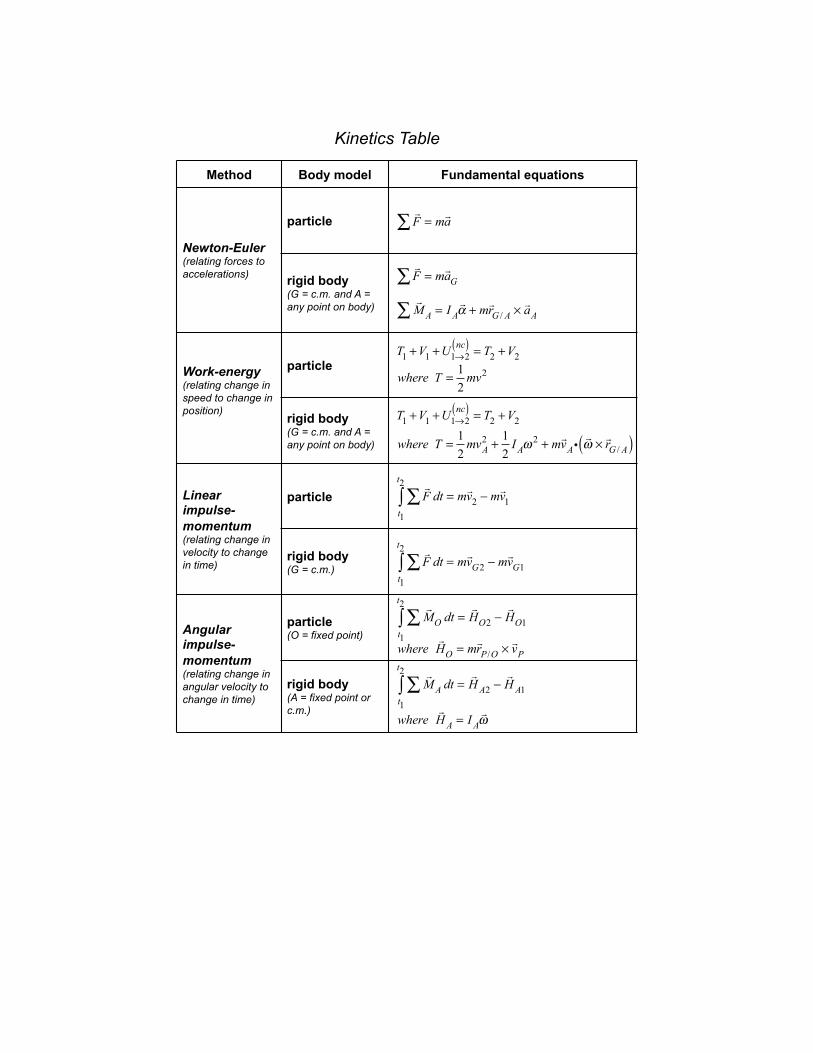
Method Body model Fundamental equations
Newton-Euler (relating forces to accelerations)
particle
rigid body (G = c.m. and A = any point on body)
Work-energy (relating change in speed to change in position)
particle
rigid body (G = c.m. and A = any point on body)
Linear impulse-momentum (relating change in velocity to change in time)
particle
rigid body (G = c.m.)
Angular impulse-momentum (relating change in angular velocity to change in time)
particle (O = fixed point)
rigid body (A = fixed point or c.m.)
!F! = m!a
!F! = m!aG
!
M A! = I A!" + m!rG / A # !aA
T1 +V1 +U1!2nc( ) = T2 +V2
where T =
12
mv2
T1 +V1 +U1!2nc( ) = T2 +V2
where T =
12
mvA2 +
12
I A!2 + m!vAi
!! " !rG / A( )
!F! dt
t1
t2
" = m!v2 # m!v1
!M A! dt
t1
t2
" =!H A2 #
!H A1
where!H A = I A
!!
!MO! dt
t1
t2
" =!
HO2 #!
HO1
where!HO = m!rP /O ! !vP
!F! dt
t1
t2
" = m!vG2 # m!vG1
Kinetics Table

FUNDAMENTALequation:thework-energyequation T1 +V1 +U1→2
nc( ) = T2 +V2
Summary:Work-EnergyEquation1
me274-cmk
where:
T = 1
2mv2 ≥ 0( ) = kinetic energy
U1→2nc( ) =
!F∑( ) i et ds
1
2
∫ = work done by non− conservative forces
=!F∑( )x
dx +!F∑( )y
dy⎡⎣⎢
⎤⎦⎥
1
2
∫
!F1
!F2
!F3
P et
x
pathofP
y
en
s
V =Vgr +Vsp = potential energy
Vgr = mgh sign depends on h( )
Vsp = 1
2kΔ2 ≥ 0 ALWAYS( )
SIGNofworkterm:Thedirectionofaforcerelativetothedictatesthesignofthework,U.
mg
P pathofP
datumline
h
!F : U1→2
F( ) > 0P
et pathofP
en
!F : U1→2
F( ) = 0
!F : U1→2
F( ) < 0 et

FUNDAMENTALequation:thework-energyequation
T1 +V1 +U1→2nc( ) = T2 +V2
Summary:Work-EnergyEquation2
me274-cmk
!F1
!F2
!F3
P et
x
pathofP
y
en
s
SYSTEMCHOICE:Makeyourchoiceofsystemas“large”asreasonable–youwanttomakeworklessforcesINTERNALtothesystem.
SOLUTIONPROCESS:1. Drawfreebodydiagram(FBD)forsystemofyourchoice(seecommentbelowonsystem
choice).
2. Writedownthework-energyequation.
3. Writedowntheappropriatekinematics(velocity)equationsfortheproblem.
4. Ifyouhaveenoughequations,solveforthedesiredunknowns.Ifyoudonothaveenoughequations,thenyouhaveprobablymissedsomeinformationfromkinematics.
CONSERVATION:Ifnoworkisdoneonthesystem,,thenenergyisconserved.
U1→2nc( ) = 0

FUNDAMENTALequation:thelinearimpulse-momentumequation:
m!v2 = m!v1 +
!F∑( ) dt
1
2
∫
Summary:LinearImpulse-MomentumEquation1
me274-cmk
!F1
!F2
!F3
P
x
y
SYSTEMCHOICE:Makeyourchoiceofsystemas“large”asreasonable–youwanttomakeasmanyforcesaspossibleINTERNALtothesystem.
CONSERVATION:Ifthereisnonetforceactingofthesysteminagiven
direction(sayx),,thenlinearmomentuminthatdirection
isconserved.
!F∑( )x
dt1
2
∫ = 0

FUNDAMENTALequation:thelinearimpulse-momentumequation:
m!v2 = m!v1 +
!F∑( ) dt
1
2
∫
Summary:LinearImpulse-MomentumEquation2
me274-cmk
!F1
!F2
!F3
P
x
y
SOLUTIONPROCESS:1. Drawfreebodydiagram(FBD)forsystemofyourchoice.Asmentionedbefore,make
yoursystemas“large”aspossible.2. Writedowntheimpulse-momentumequation.3. Writedowntheappropriatekinematics(velocity)equationsfortheproblem.4. Ifyouhaveenoughequations,solveforthedesiredunknowns.Ifyoudonothave
enoughequations,thenyouhaveprobablymissedsomeinformationfromkinematics.

FUNDAMENTALequations:thelinearimpulse-momentumequationsandcoefficientofrestitution(COR)equation
Summary:CentralImpactProblems
me274-cmk
n
A
t
B
mA mB
!vA2
!vA1
n
A
t
B
FAB
n
A
t
B
FAB
A : Ft∑ = 0 ⇒ mAvA1t = mAvA2t ⇒ vA2t = vA1t
B : Ft∑ = 0 ⇒ mBvB1t = mBvB2t ⇒ vB2t = vB1t
A+ B : Fn∑ = 0 ⇒ mAvA1n + mBvB1n = mAvA2n + mBvB2n
COR : e = −vB2n − vA2nvB1n − vA1n
⎛
⎝⎜⎞
⎠⎟
COMMENTS:• TheCORequationisvalidforONLYthen-componentsofvelocity.
• EnergyisNOTconservedduringimpact,exceptfore=1.

FUNDAMENTALequation:
COMPUTINGangularmomentum:
NOTE:OmustbeaFIXEDpoint!Why?
!HO( )2 =
!HO( )1 +
!MO dt∑
1
2
∫
!HO = m!rP/O × !vP ; general
= m xi + y j( )× "xi + "y j( ) = m x"y − y "x( ) k ; Cartesian
= m rer( )× "rer + r "θ eθ( ) = mr2 "θ k ; polar
me274-cmk
pathofP
eR
R
O
eθ
θ
P
x
y
Summary:AngularImpulse/MomentumEquation1

Summary:Angularimpulse/momentumequation2
WHENshouldIusethisequation?Thinkcentral-forceproblems… When,angularmomentumaboutOisconserved.
FUNDAMENTALequation:
!HO( )2 =
!HO( )1 +
!MO dt∑
1
2
∫
!
MO∑ =!0
me274-cmk
pathofP
eR
R
O
eθ
θ
P
x
y
IMPORTANT:ThisequationcanNOTgiveinformationontheradialcomponentofvelocityfortheparticle.Why?Whyisthisimportant?Lookattheaboveequationforcomputingangularmomentum.Typically,usework/energyfortheadditionalequation.
eR
O
eθ
θ
P !F
centralforceproblem:forceFactsdirectlytowardpointO
whereOisaFIXEDpoint.

Summary:Newton/EulerEquations1
FUNDAMENTALequations:
CRITICALISSUES:• ForNEWTON(1):Gmustbethecenterofmassofthebody
• ForEULER(2):AisANYpointonthebody.Thesamepoint“A”mustbeusedacrosstheboardintheequation–youcannotmixandmatchpointsA.
SIMPLIFICATION:IfAis:EITHERthecenterofmassGORafixedpoint(zeroacceleration)ORisparallelto,thentheEulerequation(2)reducesto:
TERMINOLOGY:IAisknownasthe“massmomentofinertia”ofthebodyaboutpointA.ThesizeofIAisdependentonthelocationofA.
1( ) !F∑ = m!aG
2( ) !M A∑ = I A
!α + m!rG / A × !aA
!
M A∑ = I A!α
SAMEpoint“A”!
!aA
!rG / A
Wewillusethisformoftheequationmostofthetime
G
!F1
!F2
!F3
A

Summary:Newton/EulerEquations2
FUNDAMENTALequations:
MASSMOMENTOFINERTIA:,withrmeasuredfrompointA
• circulardiskofradiusR,massmandc.m.atG:
• thinbaroflengthL,massmandc.m.atG:
PARALLELAXESTHEOREM:
• YouMUSThaveIGontheright-handsideoftheP.A.T.equation.
• Themassmomentofinertiaaboutthec.m.isthesmallestforall
pointsonthebody.
• Whendoyouneedtousethis?Usefulwhenanon-centroidalpointisusedinEuler’sequation.
RADIUSOFGYRATION:.Dependentonlyonthe“shape”,NOTonthemass.
1( ) !F∑ = m!aG
2( ) !M A∑ = I A
!α ;A=c.m.ORfixedpointOR
!rG / A "!aA
I A = r2 dm∫
IG = mR2 / 2
IG = mL2 / 12
I A = IG + md2
kA ! I A / m

Summary:Newton/EulerEquations3
FUNDAMENTALequations:
SOLUTIONMETHOD:thefour-stepplan
1( ) !F∑ = m!aG
2( ) !M A∑ = I A
!α ;A=c.m.ORfixedpointOR
!rG / A "!aA
SAMEpoint“A”!
Kinetics: Four-Step Problem Solving Method
The suggested plan of action for solving kinetics problems:
1. Free body diagram(s). Draw appropriate free body diagrams (FBDs) for the problem. Yourchoice of FBDs is problem dependent. For some problems, you will draw an FBD for eachbody; for others, you will draw an FBD for the entire system. An integral part of your FBDsis your choice of coordinate systems. For each FBD, draw the unit vectors corresponding toyour coordinate choice.
2. Kinetics equations. At this point, you will need to choose what solution method(s) thatyou will need to use for the particular problem at hand. In this section of the course wewill study four basic methods: Newton/Euler, work/energy, linear impulse/momentum andangular impulse/momentum. Based on your choice of method(s), write down the appropriateequations from your FBD(s) from Step 1.
3. Kinematics. Perform the needed kinematic analysis. A study of the equations in Step 2above will guide you in deciding what kinematics are needed to find a solution to the problem.
4. Solve . Count the number of unknowns and the number of equations from above. If you donot have enough equations to solve for your unknowns, then you either: (i) need to drawmore FBDs, OR (ii) need to do more kinematic analysis. When you have su�cient equationsfor the number of unknowns, solve for the desired unknowns from the above equations.
DrawINDIVIDUALfree-bodydiagrams
forNewton/Euler.
Besuretousethecorrectmassmomentof
inertiaforyourchoiceofpoint“A”.UsePATifnecessary.
Typicallythemostdifficultstep.RecalltherigidbodykinematicsfromChapter2.
Ifyouareshortequations,gobacktoStep3–Kinematics.
G
!F1
!F2
!F3
A
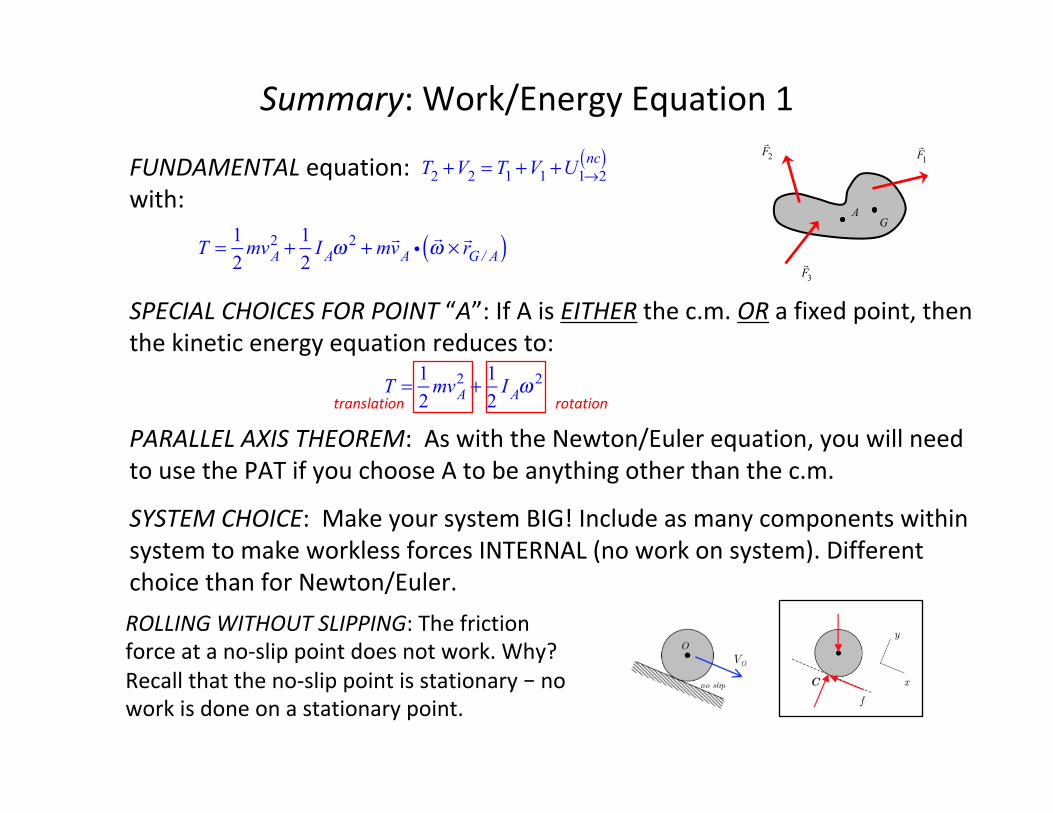
Summary:Work/EnergyEquation1
FUNDAMENTALequation:with:
SPECIALCHOICESFORPOINT“A”:IfAisEITHERthec.m.ORafixedpoint,thenthekineticenergyequationreducesto:
PARALLELAXISTHEOREM:AswiththeNewton/Eulerequation,youwillneedtousethePATifyouchooseAtobeanythingotherthanthec.m.
SYSTEMCHOICE:MakeyoursystemBIG!IncludeasmanycomponentswithinsystemtomakeworklessforcesINTERNAL(noworkonsystem).DifferentchoicethanforNewton/Euler.
T2 +V2 = T1 +V1 +U1→2nc( )
T = 1
2mvA
2 + 12
I Aω2 + m!vA i
!ω × !rG / A( )
T = 1
2mvA
2 + 12
I Aω2
rotationtranslation
G
!F1
!F2
!F3
A
ROLLINGWITHOUTSLIPPING:Thefrictionforceatano-slippointdoesnotwork.Why?Recallthattheno-slippointisstationary–noworkisdoneonastationarypoint.

Summary:Work/EnergyEquation2
FUNDAMENTALequations:with:withA=EITHERc.m.ORfixedpointSOLUTIONMETHOD:thefour-stepplan
Kinetics: Four-Step Problem Solving Method
The suggested plan of action for solving kinetics problems:
1. Free body diagram(s). Draw appropriate free body diagrams (FBDs) for the problem. Yourchoice of FBDs is problem dependent. For some problems, you will draw an FBD for eachbody; for others, you will draw an FBD for the entire system. An integral part of your FBDsis your choice of coordinate systems. For each FBD, draw the unit vectors corresponding toyour coordinate choice.
2. Kinetics equations. At this point, you will need to choose what solution method(s) thatyou will need to use for the particular problem at hand. In this section of the course wewill study four basic methods: Newton/Euler, work/energy, linear impulse/momentum andangular impulse/momentum. Based on your choice of method(s), write down the appropriateequations from your FBD(s) from Step 1.
3. Kinematics. Perform the needed kinematic analysis. A study of the equations in Step 2above will guide you in deciding what kinematics are needed to find a solution to the problem.
4. Solve . Count the number of unknowns and the number of equations from above. If you donot have enough equations to solve for your unknowns, then you either: (i) need to drawmore FBDs, OR (ii) need to do more kinematic analysis. When you have su�cient equationsfor the number of unknowns, solve for the desired unknowns from the above equations.
Drawfree-bodydiagramofentire
systemforwork/energy.
Besuretousethecorrectmassmomentof
inertiaforyourchoiceofpoint“A”.Use
PATifnecessary.
Typicallythemostdifficultstep.Recallthe
rigidbodykinematicsfromChapter2.
Ifyouareshortequations,goback
toStep3–Kinematics.
T2 +V2 = T1 +V1 +U1→2nc( )
T = 1
2mvA
2 + 12
I Aω2
G
!F1
!F2
!F3
A


















