Maximally supersymmetric spacetimes - School of …jmf/CV/Seminars/Weizmann.pdf · Maximally...
337
Maximally supersymmetric spacetimes Jos´ e Figueroa-O’Farrill Edinburgh Mathematical Physics Group School of Mathematics Neve Shalom ∼ Wahat al-Salam, 27 May 2003
Transcript of Maximally supersymmetric spacetimes - School of …jmf/CV/Seminars/Weizmann.pdf · Maximally...

Maximally supersymmetric spacetimes
Jose Figueroa-O’Farrill
Edinburgh Mathematical Physics Group
School of Mathematics
Neve Shalom ∼ Wahat al-Salam, 27 May 2003

1
Maximally symmetric spacetimes

1
Maximally symmetric spacetimes
Which are the maximally symmetric spacetimes?

1
Maximally symmetric spacetimes
Which are the maximally symmetric spacetimes?
Locally, those which admit the maximum number of Killing vectors.

1
Maximally symmetric spacetimes
Which are the maximally symmetric spacetimes?
Locally, those which admit the maximum number of Killing vectors.
Recall: ξµ is Killing ⇐⇒ ∇µξν = −∇νξµ

1
Maximally symmetric spacetimes
Which are the maximally symmetric spacetimes?
Locally, those which admit the maximum number of Killing vectors.
Recall: ξµ is Killing ⇐⇒ ∇µξν = −∇νξµ
Differentiating

1
Maximally symmetric spacetimes
Which are the maximally symmetric spacetimes?
Locally, those which admit the maximum number of Killing vectors.
Recall: ξµ is Killing ⇐⇒ ∇µξν = −∇νξµ
Differentiating =⇒ Killing’s identity

1
Maximally symmetric spacetimes
Which are the maximally symmetric spacetimes?
Locally, those which admit the maximum number of Killing vectors.
Recall: ξµ is Killing ⇐⇒ ∇µξν = −∇νξµ
Differentiating =⇒ Killing’s identity:
∇µ∇νξρ = Rµνρσξσ

2
Therefore a Killing vector ξ is uniquely determined by

2
Therefore a Killing vector ξ is uniquely determined by:
ξ(p)

2
Therefore a Killing vector ξ is uniquely determined by:
ξ(p) and ∇µξν(p)

2
Therefore a Killing vector ξ is uniquely determined by:
ξ(p) and ∇µξν(p) at any point p.

2
Therefore a Killing vector ξ is uniquely determined by:
ξ(p) and ∇µξν(p) at any point p.
This is suggestive of parallel sections of a vector bundle.

2
Therefore a Killing vector ξ is uniquely determined by:
ξ(p) and ∇µξν(p) at any point p.
This is suggestive of parallel sections of a vector bundle.
Indeed on the bundle
E(M) = TM ⊕ Λ2T ∗M

2
Therefore a Killing vector ξ is uniquely determined by:
ξ(p) and ∇µξν(p) at any point p.
This is suggestive of parallel sections of a vector bundle.
Indeed on the bundle
E(M) = TM ⊕ Λ2T ∗M
there is a connection D defined on a section (ξµ, Fµν) of E(M) by

2
Therefore a Killing vector ξ is uniquely determined by:
ξ(p) and ∇µξν(p) at any point p.
This is suggestive of parallel sections of a vector bundle.
Indeed on the bundle
E(M) = TM ⊕ Λ2T ∗M
there is a connection D defined on a section (ξµ, Fµν) of E(M) by
Dµ
(ξν
Fνρ
)=(
∇µξν − Fµν
∇µFνρ −Rµνρσξσ
)

3
=⇒ (ξµ, Fµν) is parallel

3
=⇒ (ξµ, Fµν) is parallel if and only if
• ξµ is a Killing vector

3
=⇒ (ξµ, Fµν) is parallel if and only if
• ξµ is a Killing vector, and
• Fµν = ∇µξν

3
=⇒ (ξµ, Fµν) is parallel if and only if
• ξµ is a Killing vector, and
• Fµν = ∇µξν
E(M) has rank n(n + 1)/2 for an n-dimensional M .

3
=⇒ (ξµ, Fµν) is parallel if and only if
• ξµ is a Killing vector, and
• Fµν = ∇µξν
E(M) has rank n(n + 1)/2 for an n-dimensional M .
=⇒ ∃ ≤ n(n + 1)/2 linearly independent Killing vectors.

3
=⇒ (ξµ, Fµν) is parallel if and only if
• ξµ is a Killing vector, and
• Fµν = ∇µξν
E(M) has rank n(n + 1)/2 for an n-dimensional M .
=⇒ ∃ ≤ n(n + 1)/2 linearly independent Killing vectors.
Maximal symmetry =⇒ E(M) is flat

3
=⇒ (ξµ, Fµν) is parallel if and only if
• ξµ is a Killing vector, and
• Fµν = ∇µξν
E(M) has rank n(n + 1)/2 for an n-dimensional M .
=⇒ ∃ ≤ n(n + 1)/2 linearly independent Killing vectors.
Maximal symmetry =⇒ E(M) is flat
=⇒ M has constant sectional curvature κ.

4
In the riemannian case (and up to local isometry)

4
In the riemannian case (and up to local isometry):
• κ = 0: euclidean space En

4
In the riemannian case (and up to local isometry):
• κ = 0: euclidean space En
• κ > 0: sphere
Sn ⊂ En+1

4
In the riemannian case (and up to local isometry):
• κ = 0: euclidean space En
• κ > 0: sphere
Sn ⊂ En+1 : x21 + x2
2 + · · ·+ x2n+1 =
1κ2

4
In the riemannian case (and up to local isometry):
• κ = 0: euclidean space En
• κ > 0: sphere
Sn ⊂ En+1 : x21 + x2
2 + · · ·+ x2n+1 =
1κ2
• κ < 0: hyperbolic space
Hn ⊂ E1,n

4
In the riemannian case (and up to local isometry):
• κ = 0: euclidean space En
• κ > 0: sphere
Sn ⊂ En+1 : x21 + x2
2 + · · ·+ x2n+1 =
1κ2
• κ < 0: hyperbolic space
Hn ⊂ E1,n : −t21 + x21 + · · ·+ x2
n =−1κ2

5
In lorentzian geometry (and up to local isometry)

5
In lorentzian geometry (and up to local isometry):
• κ = 0: Minkowski space En−1,1

5
In lorentzian geometry (and up to local isometry):
• κ = 0: Minkowski space En−1,1
• κ > 0: de Sitter space
dSn ⊂ E1,n

5
In lorentzian geometry (and up to local isometry):
• κ = 0: Minkowski space En−1,1
• κ > 0: de Sitter space
dSn ⊂ E1,n : −t21 + x21 + x2
2 + · · ·+ x2n =
1κ2

5
In lorentzian geometry (and up to local isometry):
• κ = 0: Minkowski space En−1,1
• κ > 0: de Sitter space
dSn ⊂ E1,n : −t21 + x21 + x2
2 + · · ·+ x2n =
1κ2
• κ < 0: anti de Sitter space
AdSn ⊂ E2,n−1

5
In lorentzian geometry (and up to local isometry):
• κ = 0: Minkowski space En−1,1
• κ > 0: de Sitter space
dSn ⊂ E1,n : −t21 + x21 + x2
2 + · · ·+ x2n =
1κ2
• κ < 0: anti de Sitter space
AdSn ⊂ E2,n−1 : −t21 − t22 + x21 + · · ·+ x2
n−1 =−1κ2

6
Note: the space form with κ = 0 is a geometric limit of the space
forms with κ 6= 0.

6
Note: the space form with κ = 0 is a geometric limit of the space
forms with κ 6= 0.
It remains to classify smooth discrete quotients of the universal
covers of the above spaces.

6
Note: the space form with κ = 0 is a geometric limit of the space
forms with κ 6= 0.
It remains to classify smooth discrete quotients of the universal
covers of the above spaces.
This is the Clifford–Klein space form problem, first posed by Killing
in 1891 and reformulated in these terms by Hopf in 1925.

6
Note: the space form with κ = 0 is a geometric limit of the space
forms with κ 6= 0.
It remains to classify smooth discrete quotients of the universal
covers of the above spaces.
This is the Clifford–Klein space form problem, first posed by Killing
in 1891 and reformulated in these terms by Hopf in 1925.
The flat and spherical cases are completely solved (culminating in
the work of Wolf in the 1970s), but the possible quotients of
hyperbolic and lorentzian cases are still unclassified.

7
Maximally supersymmetric spacetimes

7
Maximally supersymmetric spacetimes
The supersymmetric analogue of the question:

7
Maximally supersymmetric spacetimes
The supersymmetric analogue of the question:
Which are the maximally symmetric spacetimes?

7
Maximally supersymmetric spacetimes
The supersymmetric analogue of the question:
Which are the maximally symmetric spacetimes?
is the question:

7
Maximally supersymmetric spacetimes
The supersymmetric analogue of the question:
Which are the maximally symmetric spacetimes?
is the question:
Which are the maximally supersymmetric backgrounds of
supergravity theories?

7
Maximally supersymmetric spacetimes
The supersymmetric analogue of the question:
Which are the maximally symmetric spacetimes?
is the question:
Which are the maximally supersymmetric backgrounds of
supergravity theories?
In this talk I will report on progress towards answering this
question.

8
Based on work in collaboration with

8
Based on work in collaboration with
• George Papadopoulos (King’s College, London)
? hep-th/0211089 (JHEP 03 (2003) 048)
? math.AG/0211170 (J Geom Phys to appear)

8
Based on work in collaboration with
• George Papadopoulos (King’s College, London)
? hep-th/0211089 (JHEP 03 (2003) 048)
? math.AG/0211170 (J Geom Phys to appear)
• Ali Chamseddine and Wafic Sabra (CAMS, Beirut)
? in preparation

9
Supergravities
32 24 20 16 12 8 4
11 M
10 IIA IIB I
9 N = 2 N = 1
8 N = 2 N = 1
7 N = 4 N = 2
6 (2, 2) (3,1) (4,0) (2, 1) (3,0) (1, 1) (2, 0) (1, 0)
5 N = 8 N = 6 N = 4 N = 2
4 N = 8 N = 6 N = 5 N = 4 N = 3 N = 2 N = 1
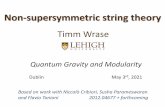
[Van Proeyen, hep-th/0301005]

10
Strategy
Let (M, g,Φ, S) be a supergravity background

10
Strategy
Let (M, g,Φ, S) be a supergravity background:
• (M, g) a lorentzian spin manifold

10
Strategy
Let (M, g,Φ, S) be a supergravity background:
• (M, g) a lorentzian spin manifold
• Φ denotes collectively the other bosonic fields

10
Strategy
Let (M, g,Φ, S) be a supergravity background:
• (M, g) a lorentzian spin manifold
• Φ denotes collectively the other bosonic fields
• S a real vector bundle of spinors

10
Strategy
Let (M, g,Φ, S) be a supergravity background:
• (M, g) a lorentzian spin manifold
• Φ denotes collectively the other bosonic fields
• S a real vector bundle of spinors
• fermions have been put to zero

11
(M, g,Φ, S) is supersymmetric if it admits Killing spinors

11
(M, g,Φ, S) is supersymmetric if it admits Killing spinors; that is,
sections ε of S such that
Dµε = 0

11
(M, g,Φ, S) is supersymmetric if it admits Killing spinors; that is,
sections ε of S such that
Dµε = 0
where D is the connection on S

11
(M, g,Φ, S) is supersymmetric if it admits Killing spinors; that is,
sections ε of S such that
Dµε = 0
where D is the connection on S
Dµ = ∇µ + Ωµ(g,Φ)

11
(M, g,Φ, S) is supersymmetric if it admits Killing spinors; that is,
sections ε of S such that
Dµε = 0
where D is the connection on S
Dµ = ∇µ + Ωµ(g,Φ)
defined by the supersymmetric variation of the gravitino:
δεΨµ = Dµε

12
There are possibly also algebraic equations
A(g,Φ)ε = 0

12
There are possibly also algebraic equations
A(g,Φ)ε = 0
where A is the algebraic operator defined by the supersymmetric
variation of any other fermionic fields

12
There are possibly also algebraic equations
A(g,Φ)ε = 0
where A is the algebraic operator defined by the supersymmetric
variation of any other fermionic fields (dilatinos, gauginos,...)

12
There are possibly also algebraic equations
A(g,Φ)ε = 0
where A is the algebraic operator defined by the supersymmetric
variation of any other fermionic fields (dilatinos, gauginos,...)
δεχ = Aε

12
There are possibly also algebraic equations
A(g,Φ)ε = 0
where A is the algebraic operator defined by the supersymmetric
variation of any other fermionic fields (dilatinos, gauginos,...)
δεχ = Aε
Maximal supersymmetry =⇒

12
There are possibly also algebraic equations
A(g,Φ)ε = 0
where A is the algebraic operator defined by the supersymmetric
variation of any other fermionic fields (dilatinos, gauginos,...)
δεχ = Aε
Maximal supersymmetry =⇒ D is flat

12
There are possibly also algebraic equations
A(g,Φ)ε = 0
where A is the algebraic operator defined by the supersymmetric
variation of any other fermionic fields (dilatinos, gauginos,...)
δεχ = Aε
Maximal supersymmetry =⇒ D is flat and A = 0.

12
There are possibly also algebraic equations
A(g,Φ)ε = 0
where A is the algebraic operator defined by the supersymmetric
variation of any other fermionic fields (dilatinos, gauginos,...)
δεχ = Aε
Maximal supersymmetry =⇒ D is flat and A = 0.
Typically A = 0 sets some gauge field strengths to zero

12
There are possibly also algebraic equations
A(g,Φ)ε = 0
where A is the algebraic operator defined by the supersymmetric
variation of any other fermionic fields (dilatinos, gauginos,...)
δεχ = Aε
Maximal supersymmetry =⇒ D is flat and A = 0.
Typically A = 0 sets some gauge field strengths to zero, and the
flatness of D constrains the geometry and any remaining field
strengths.

12
There are possibly also algebraic equations
A(g,Φ)ε = 0
where A is the algebraic operator defined by the supersymmetric
variation of any other fermionic fields (dilatinos, gauginos,...)
δεχ = Aε
Maximal supersymmetry =⇒ D is flat and A = 0.
Typically A = 0 sets some gauge field strengths to zero, and the
flatness of D constrains the geometry and any remaining field
strengths. The strategy is therefore to study the flatness equations
for D.

13
Classifications
In the table we have highlighted the “top” theories whose
maximally supersymmetric backgrounds are known:

13
Classifications
In the table we have highlighted the “top” theories whose
maximally supersymmetric backgrounds are known:
• D = 4 N = 1 [Tod (1984)]

13
Classifications
In the table we have highlighted the “top” theories whose
maximally supersymmetric backgrounds are known:
• D = 4 N = 1 [Tod (1984)]
• D = 6 (1, 0), (2, 0) [Chamseddine–FO–Sabra (2003)]

13
Classifications
In the table we have highlighted the “top” theories whose
maximally supersymmetric backgrounds are known:
• D = 4 N = 1 [Tod (1984)]
• D = 6 (1, 0), (2, 0) [Chamseddine–FO–Sabra (2003)]
• D = 10 IIB and I [FO–Papadopoulos (2002)]

13
Classifications
In the table we have highlighted the “top” theories whose
maximally supersymmetric backgrounds are known:
• D = 4 N = 1 [Tod (1984)]
• D = 6 (1, 0), (2, 0) [Chamseddine–FO–Sabra (2003)]
• D = 10 IIB and I [FO–Papadopoulos (2002)]
• D = 11 M [FO–Papadopoulos (2001)]

14
Eleven-dimensional supergravity
• bosonic fields

14
Eleven-dimensional supergravity
• bosonic fields:
? metric g

14
Eleven-dimensional supergravity
• bosonic fields:
? metric g, and
? closed 4-form F

14
Eleven-dimensional supergravity
• bosonic fields:
? metric g, and
? closed 4-form F
for a total of 44 + 84 = 128 bosonic physical degrees of freedom.

14
Eleven-dimensional supergravity
• bosonic fields:
? metric g, and
? closed 4-form F
for a total of 44 + 84 = 128 bosonic physical degrees of freedom.
• spinors are Majorana

14
Eleven-dimensional supergravity
• bosonic fields:
? metric g, and
? closed 4-form F
for a total of 44 + 84 = 128 bosonic physical degrees of freedom.
• spinors are Majorana; that is, associated to one of the two
irreducible real 32-dimensional representations of C`(1, 10).

14
Eleven-dimensional supergravity
• bosonic fields:
? metric g, and
? closed 4-form F
for a total of 44 + 84 = 128 bosonic physical degrees of freedom.
• spinors are Majorana; that is, associated to one of the two
irreducible real 32-dimensional representations of C`(1, 10).Therefore the gravitino also has 128 physical degrees of freedom.

15
• the gravitino variation defines the connection
Dµ = ∇µ − 1288Fνρστ
(Γνρστ
µ + 8Γνρσδτµ
)

15
• the gravitino variation defines the connection
Dµ = ∇µ − 1288Fνρστ
(Γνρστ
µ + 8Γνρσδτµ
)
For fixed µ, ν, the curvature Rµν of D can be expanded in terms of
antisymmetric products of Γ matrices

15
• the gravitino variation defines the connection
Dµ = ∇µ − 1288Fνρστ
(Γνρστ
µ + 8Γνρσδτµ
)
For fixed µ, ν, the curvature Rµν of D can be expanded in terms of
antisymmetric products of Γ matrices
[Dµ, Dν] = RµνIΓI

15
• the gravitino variation defines the connection
Dµ = ∇µ − 1288Fνρστ
(Γνρστ
µ + 8Γνρσδτµ
)
For fixed µ, ν, the curvature Rµν of D can be expanded in terms of
antisymmetric products of Γ matrices
[Dµ, Dν] = RµνIΓI
where I is an index labeling the following elements
Γa Γab Γabc Γabcd Γabcde

16
(We have used that Γ01···9\ = −1 in this representation.)

16
(We have used that Γ01···9\ = −1 in this representation.)
The flatness equations are the vanishing of the RµνI.

16
(We have used that Γ01···9\ = −1 in this representation.)
The flatness equations are the vanishing of the RµνI.
Summarising the results:

16
(We have used that Γ01···9\ = −1 in this representation.)
The flatness equations are the vanishing of the RµνI.
Summarising the results:
• F is parallel: ∇F = 0

16
(We have used that Γ01···9\ = −1 in this representation.)
The flatness equations are the vanishing of the RµνI.
Summarising the results:
• F is parallel: ∇F = 0
• the Riemann curvature tensor is determined algebraically in terms
of F and g

16
(We have used that Γ01···9\ = −1 in this representation.)
The flatness equations are the vanishing of the RµνI.
Summarising the results:
• F is parallel: ∇F = 0
• the Riemann curvature tensor is determined algebraically in terms
of F and g:
Rµνρσ = Tµνρσ(F, g)
with T quadratic in F

16
(We have used that Γ01···9\ = −1 in this representation.)
The flatness equations are the vanishing of the RµνI.
Summarising the results:
• F is parallel: ∇F = 0
• the Riemann curvature tensor is determined algebraically in terms
of F and g:
Rµνρσ = Tµνρσ(F, g)
with T quadratic in F . This means that Rµνρσ is parallel

16
(We have used that Γ01···9\ = −1 in this representation.)
The flatness equations are the vanishing of the RµνI.
Summarising the results:
• F is parallel: ∇F = 0
• the Riemann curvature tensor is determined algebraically in terms
of F and g:
Rµνρσ = Tµνρσ(F, g)
with T quadratic in F . This means that Rµνρσ is parallel;
equivalently, that g is locally symmetric.

17
• F obeys the Plucker relations
ιXιY ιZF ∧ F = 0 for all X, Y, Z

17
• F obeys the Plucker relations
ιXιY ιZF ∧ F = 0 for all X, Y, Z
or
Fαβγ[µFνρστ ] = 0

17
• F obeys the Plucker relations
ιXιY ιZF ∧ F = 0 for all X, Y, Z
or
Fαβγ[µFνρστ ] = 0
The solution is that F is decomposable into a wedge product of
four 1-forms

17
• F obeys the Plucker relations
ιXιY ιZF ∧ F = 0 for all X, Y, Z
or
Fαβγ[µFνρστ ] = 0
The solution is that F is decomposable into a wedge product of
four 1-forms:
F = θ1 ∧ θ2 ∧ θ3 ∧ θ4

17
• F obeys the Plucker relations
ιXιY ιZF ∧ F = 0 for all X, Y, Z
or
Fαβγ[µFνρστ ] = 0
The solution is that F is decomposable into a wedge product of
four 1-forms:
F = θ1 ∧ θ2 ∧ θ3 ∧ θ4 or Fµνρσ = θ1[µθ2
νθ3ρθ
4σ]

18
We can restrict to the tangent space at any one point in the
spacetime:

18
We can restrict to the tangent space at any one point in the
spacetime: the metric g defines a lorentzian inner product and F is
either zero or defines a 4-plane

18
We can restrict to the tangent space at any one point in the
spacetime: the metric g defines a lorentzian inner product and F is
either zero or defines a 4-plane: the plane spanned by the θi.

18
We can restrict to the tangent space at any one point in the
spacetime: the metric g defines a lorentzian inner product and F is
either zero or defines a 4-plane: the plane spanned by the θi.
If F is zero, then the solution is flat.

18
We can restrict to the tangent space at any one point in the
spacetime: the metric g defines a lorentzian inner product and F is
either zero or defines a 4-plane: the plane spanned by the θi.
If F is zero, then the solution is flat. Otherwise

18
We can restrict to the tangent space at any one point in the
spacetime: the metric g defines a lorentzian inner product and F is
either zero or defines a 4-plane: the plane spanned by the θi.
If F is zero, then the solution is flat. Otherwise:
• if the plane is euclidean

18
We can restrict to the tangent space at any one point in the
spacetime: the metric g defines a lorentzian inner product and F is
either zero or defines a 4-plane: the plane spanned by the θi.
If F is zero, then the solution is flat. Otherwise:
• if the plane is euclidean, we can choose a pseudo-orthonormal
frame in which the only nonzero component of F is F1234

18
We can restrict to the tangent space at any one point in the
spacetime: the metric g defines a lorentzian inner product and F is
either zero or defines a 4-plane: the plane spanned by the θi.
If F is zero, then the solution is flat. Otherwise:
• if the plane is euclidean, we can choose a pseudo-orthonormal
frame in which the only nonzero component of F is F1234
• if the plane is lorentzian

18
We can restrict to the tangent space at any one point in the
spacetime: the metric g defines a lorentzian inner product and F is
either zero or defines a 4-plane: the plane spanned by the θi.
If F is zero, then the solution is flat. Otherwise:
• if the plane is euclidean, we can choose a pseudo-orthonormal
frame in which the only nonzero component of F is F1234
• if the plane is lorentzian, we can choose a pseudo-orthonormal
frame in which the only nonzero component of F is F0123

18
We can restrict to the tangent space at any one point in the
spacetime: the metric g defines a lorentzian inner product and F is
either zero or defines a 4-plane: the plane spanned by the θi.
If F is zero, then the solution is flat. Otherwise:
• if the plane is euclidean, we can choose a pseudo-orthonormal
frame in which the only nonzero component of F is F1234
• if the plane is lorentzian, we can choose a pseudo-orthonormal
frame in which the only nonzero component of F is F0123
• if the plane is null

18
We can restrict to the tangent space at any one point in the
spacetime: the metric g defines a lorentzian inner product and F is
either zero or defines a 4-plane: the plane spanned by the θi.
If F is zero, then the solution is flat. Otherwise:
• if the plane is euclidean, we can choose a pseudo-orthonormal
frame in which the only nonzero component of F is F1234
• if the plane is lorentzian, we can choose a pseudo-orthonormal
frame in which the only nonzero component of F is F0123
• if the plane is null, we can choose a pseudo-orthonormal frame in
which the only nonzero component of F is F−123

19
We now plug these expressions back into the equation which relates
the curvature tensor to F and g

19
We now plug these expressions back into the equation which relates
the curvature tensor to F and g finding the following solutions:
• F euclidean

19
We now plug these expressions back into the equation which relates
the curvature tensor to F and g finding the following solutions:
• F euclidean: a one parameter R > 0 family of vacua
AdS7(−7R)× S4(8R) F =√
6R dvol(S4)

19
We now plug these expressions back into the equation which relates
the curvature tensor to F and g finding the following solutions:
• F euclidean: a one parameter R > 0 family of vacua
AdS7(−7R)× S4(8R) F =√
6R dvol(S4)
• F lorentzian

19
We now plug these expressions back into the equation which relates
the curvature tensor to F and g finding the following solutions:
• F euclidean: a one parameter R > 0 family of vacua
AdS7(−7R)× S4(8R) F =√
6R dvol(S4)
• F lorentzian: a one parameter R < 0 family of vacua
AdS4(8R)× S7(−7R) F =√−6R dvol(AdS4)

20
• F null

20
• F null: a one parameter µ ∈ R family of symmetric plane waves:
g = 2dx+dx− − 136µ
2
(4
3∑i=1
(xi)2 +9∑
i=4
(xi)2)
(dx−)2 +9∑
i=1
(dxi)2

20
• F null: a one parameter µ ∈ R family of symmetric plane waves:
g = 2dx+dx− − 136µ
2
(4
3∑i=1
(xi)2 +9∑
i=4
(xi)2)
(dx−)2 +9∑
i=1
(dxi)2
F = µdx− ∧ dx1 ∧ dx2 ∧ dx3
Notice that for µ = 0 we recover the flat space solution

20
• F null: a one parameter µ ∈ R family of symmetric plane waves:
g = 2dx+dx− − 136µ
2
(4
3∑i=1
(xi)2 +9∑
i=4
(xi)2)
(dx−)2 +9∑
i=1
(dxi)2
F = µdx− ∧ dx1 ∧ dx2 ∧ dx3
Notice that for µ = 0 we recover the flat space solution; whereas
for µ 6= 0 all solutions are equivalent

20
• F null: a one parameter µ ∈ R family of symmetric plane waves:
g = 2dx+dx− − 136µ
2
(4
3∑i=1
(xi)2 +9∑
i=4
(xi)2)
(dx−)2 +9∑
i=1
(dxi)2
F = µdx− ∧ dx1 ∧ dx2 ∧ dx3
Notice that for µ = 0 we recover the flat space solution; whereas
for µ 6= 0 all solutions are equivalent and coincide with the
eleven-dimensional vacuum discovered by Kowalski-Glikman in
1984.

20
• F null: a one parameter µ ∈ R family of symmetric plane waves:
g = 2dx+dx− − 136µ
2
(4
3∑i=1
(xi)2 +9∑
i=4
(xi)2)
(dx−)2 +9∑
i=1
(dxi)2
F = µdx− ∧ dx1 ∧ dx2 ∧ dx3
Notice that for µ = 0 we recover the flat space solution; whereas
for µ 6= 0 all solutions are equivalent and coincide with the
eleven-dimensional vacuum discovered by Kowalski-Glikman in
1984.
All vacua embed isometrically in E2,11 as the intersections of two
quadrics.

21
Solutions are related by Penrose limits

21
Solutions are related by Penrose limits, which are induced by a
generalised Penrose limit in E2,11

21
Solutions are related by Penrose limits, which are induced by a
generalised Penrose limit in E2,11:
[Blau–FO–Hull–Papadopoulos hep-th/0201081]
[Blau–FO–Papadopoulos hep-th/0202111]
AdS4×S7 S4 ×AdS7

21
Solutions are related by Penrose limits, which are induced by a
generalised Penrose limit in E2,11:
[Blau–FO–Hull–Papadopoulos hep-th/0201081]
[Blau–FO–Papadopoulos hep-th/0202111]
AdS4×S7 S4 ×AdS7
@@
@@
@@I
KG

21
Solutions are related by Penrose limits, which are induced by a
generalised Penrose limit in E2,11:
[Blau–FO–Hull–Papadopoulos hep-th/0201081]
[Blau–FO–Papadopoulos hep-th/0202111]
AdS4×S7 S4 ×AdS7
@@
@@
@@I
KG
@@
@@
@@R
flat

21
Solutions are related by Penrose limits, which are induced by a
generalised Penrose limit in E2,11:
[Blau–FO–Hull–Papadopoulos hep-th/0201081]
[Blau–FO–Papadopoulos hep-th/0202111]
AdS4×S7 S4 ×AdS7
@@
@@
@@I
KG
@@
@@
@@R
flat?
[Back]

22
(1, 0) D = 6 supergravity

22
(1, 0) D = 6 supergravity
• bosonic fields

22
(1, 0) D = 6 supergravity
• bosonic fields:
? metric g

22
(1, 0) D = 6 supergravity
• bosonic fields:
? metric g
? anti-selfdual closed 3-form F

22
(1, 0) D = 6 supergravity
• bosonic fields:
? metric g
? anti-selfdual closed 3-form F
for a total of 9 + 3 = 12 physical bosonic degrees of freedom

22
(1, 0) D = 6 supergravity
• bosonic fields:
? metric g
? anti-selfdual closed 3-form F
for a total of 9 + 3 = 12 physical bosonic degrees of freedom
• spinors are positive-chirality symplectic Majorana–Weyl

22
(1, 0) D = 6 supergravity
• bosonic fields:
? metric g
? anti-selfdual closed 3-form F
for a total of 9 + 3 = 12 physical bosonic degrees of freedom
• spinors are positive-chirality symplectic Majorana–Weyl; i.e.,
associated to the 8-dimensional real representation of Spin(1, 5)×Sp(1) having positive six-dimensional chirality.

22
(1, 0) D = 6 supergravity
• bosonic fields:
? metric g
? anti-selfdual closed 3-form F
for a total of 9 + 3 = 12 physical bosonic degrees of freedom
• spinors are positive-chirality symplectic Majorana–Weyl; i.e.,
associated to the 8-dimensional real representation of Spin(1, 5)×Sp(1) having positive six-dimensional chirality.
The gravitino has therefore also 12 physical degrees of freedom.

23
• The gravitino variation yields the connection
Dµ = ∇µ + 18Fµ
abΓab

23
• The gravitino variation yields the connection
Dµ = ∇µ + 18Fµ
abΓab
The connection D is actually induced from a metric connection
with torsion

23
• The gravitino variation yields the connection
Dµ = ∇µ + 18Fµ
abΓab
The connection D is actually induced from a metric connection
with torsion; i.e., Dg = 0

23
• The gravitino variation yields the connection
Dµ = ∇µ + 18Fµ
abΓab
The connection D is actually induced from a metric connection
with torsion; i.e., Dg = 0 and
Dµ∂ν = Γµνρ∂ρ

23
• The gravitino variation yields the connection
Dµ = ∇µ + 18Fµ
abΓab
The connection D is actually induced from a metric connection
with torsion; i.e., Dg = 0 and
Dµ∂ν = Γµνρ∂ρ with Γµν
ρ = Γµνρ + Fµν
ρ

23
• The gravitino variation yields the connection
Dµ = ∇µ + 18Fµ
abΓab
The connection D is actually induced from a metric connection
with torsion; i.e., Dg = 0 and
Dµ∂ν = Γµνρ∂ρ with Γµν
ρ = Γµνρ + Fµν
ρ
Maximal supersymmetry =⇒ D is flat.

24
Theorem (Cartan–Schouten (1926), Wolf (1971/2),Cahen–Parker (1977)).

24
Theorem (Cartan–Schouten (1926), Wolf (1971/2),Cahen–Parker (1977)).A lorentzian manifold admitting a flat metric connection withtorsion

24
Theorem (Cartan–Schouten (1926), Wolf (1971/2),Cahen–Parker (1977)).A lorentzian manifold admitting a flat metric connection withtorsion is locally isometric to a parallelised Lie group with bi-invariant metric.

24
Theorem (Cartan–Schouten (1926), Wolf (1971/2),Cahen–Parker (1977)).A lorentzian manifold admitting a flat metric connection withtorsion is locally isometric to a parallelised Lie group with bi-invariant metric.
As a corollary, vacua of (1, 0) D = 6 supergravity are locally
isometric to six-dimensional Lie groups

24
Theorem (Cartan–Schouten (1926), Wolf (1971/2),Cahen–Parker (1977)).A lorentzian manifold admitting a flat metric connection withtorsion is locally isometric to a parallelised Lie group with bi-invariant metric.
As a corollary, vacua of (1, 0) D = 6 supergravity are locally
isometric to six-dimensional Lie groups admitting a bi-invariant
lorentzian metric

24
Theorem (Cartan–Schouten (1926), Wolf (1971/2),Cahen–Parker (1977)).A lorentzian manifold admitting a flat metric connection withtorsion is locally isometric to a parallelised Lie group with bi-invariant metric.
As a corollary, vacua of (1, 0) D = 6 supergravity are locally
isometric to six-dimensional Lie groups admitting a bi-invariant
lorentzian metric and whose parallelizing torsion is anti-self-dual.

24
Theorem (Cartan–Schouten (1926), Wolf (1971/2),Cahen–Parker (1977)).A lorentzian manifold admitting a flat metric connection withtorsion is locally isometric to a parallelised Lie group with bi-invariant metric.
As a corollary, vacua of (1, 0) D = 6 supergravity are locally
isometric to six-dimensional Lie groups admitting a bi-invariant
lorentzian metric and whose parallelizing torsion is anti-self-dual.
Equivalently, they are in one-to-one correspondence with
six-dimensional Lie algebras with an invariant lorentzian metric

24
Theorem (Cartan–Schouten (1926), Wolf (1971/2),Cahen–Parker (1977)).A lorentzian manifold admitting a flat metric connection withtorsion is locally isometric to a parallelised Lie group with bi-invariant metric.
As a corollary, vacua of (1, 0) D = 6 supergravity are locally
isometric to six-dimensional Lie groups admitting a bi-invariant
lorentzian metric and whose parallelizing torsion is anti-self-dual.
Equivalently, they are in one-to-one correspondence with
six-dimensional Lie algebras with an invariant lorentzian metric and
with anti-selfdual structure constants fabc.

24
Theorem (Cartan–Schouten (1926), Wolf (1971/2),Cahen–Parker (1977)).A lorentzian manifold admitting a flat metric connection withtorsion is locally isometric to a parallelised Lie group with bi-invariant metric.
As a corollary, vacua of (1, 0) D = 6 supergravity are locally
isometric to six-dimensional Lie groups admitting a bi-invariant
lorentzian metric and whose parallelizing torsion is anti-self-dual.
Equivalently, they are in one-to-one correspondence with
six-dimensional Lie algebras with an invariant lorentzian metric and
with anti-selfdual structure constants fabc.
The solution to this problem is known.

25
Lorentzian Lie algebras
Which Lie algebras have an invariant metric?

25
Lorentzian Lie algebras
Which Lie algebras have an invariant metric?
• abelian Lie algebras

25
Lorentzian Lie algebras
Which Lie algebras have an invariant metric?
• abelian Lie algebras with any metric

25
Lorentzian Lie algebras
Which Lie algebras have an invariant metric?
• abelian Lie algebras with any metric
• semisimple Lie algebras

25
Lorentzian Lie algebras
Which Lie algebras have an invariant metric?
• abelian Lie algebras with any metric
• semisimple Lie algebras with the Killing form (Cartan’s criterion)

25
Lorentzian Lie algebras
Which Lie algebras have an invariant metric?
• abelian Lie algebras with any metric
• semisimple Lie algebras with the Killing form (Cartan’s criterion)
• reductive Lie algebras = semisimple ⊕ abelian

25
Lorentzian Lie algebras
Which Lie algebras have an invariant metric?
• abelian Lie algebras with any metric
• semisimple Lie algebras with the Killing form (Cartan’s criterion)
• reductive Lie algebras = semisimple ⊕ abelian
• classical doubles h n h∗

25
Lorentzian Lie algebras
Which Lie algebras have an invariant metric?
• abelian Lie algebras with any metric
• semisimple Lie algebras with the Killing form (Cartan’s criterion)
• reductive Lie algebras = semisimple ⊕ abelian
• classical doubles h n h∗ with the dual pairing

25
Lorentzian Lie algebras
Which Lie algebras have an invariant metric?
• abelian Lie algebras with any metric
• semisimple Lie algebras with the Killing form (Cartan’s criterion)
• reductive Lie algebras = semisimple ⊕ abelian
• classical doubles h n h∗ with the dual pairing
But there is a more general construction.

26
The double extension
• g a Lie algebra with an invariant metric

26
The double extension
• g a Lie algebra with an invariant metric
• h a Lie algebra acting on g via antisymmetric derivations

26
The double extension
• g a Lie algebra with an invariant metric
• h a Lie algebra acting on g via antisymmetric derivations; i.e.,
? preserving the Lie bracket of g

26
The double extension
• g a Lie algebra with an invariant metric
• h a Lie algebra acting on g via antisymmetric derivations; i.e.,
? preserving the Lie bracket of g, and
? preserving the metric

26
The double extension
• g a Lie algebra with an invariant metric
• h a Lie algebra acting on g via antisymmetric derivations; i.e.,
? preserving the Lie bracket of g, and
? preserving the metric
• since h preserves the metric on g, there is a linear map
h → Λ2g

27
whose dual map
ω : Λ2g → h∗

27
whose dual map
ω : Λ2g → h∗
is a cocycle

27
whose dual map
ω : Λ2g → h∗
is a cocycle because h preserves the Lie bracket in g

27
whose dual map
ω : Λ2g → h∗
is a cocycle because h preserves the Lie bracket in g
• so we build the central extension g×ω h∗

27
whose dual map
ω : Λ2g → h∗
is a cocycle because h preserves the Lie bracket in g
• so we build the central extension g×ω h∗; i.e.,
[Xa, Xb] = fabcXc + ωab iH
i

27
whose dual map
ω : Λ2g → h∗
is a cocycle because h preserves the Lie bracket in g
• so we build the central extension g×ω h∗; i.e.,
[Xa, Xb] = fabcXc + ωab iH
i
relative to bases Xa, Hi and Hi for g, h and h∗, respectively.

27
whose dual map
ω : Λ2g → h∗
is a cocycle because h preserves the Lie bracket in g
• so we build the central extension g×ω h∗; i.e.,
[Xa, Xb] = fabcXc + ωab iH
i
relative to bases Xa, Hi and Hi for g, h and h∗, respectively.
• h acts on g×ω h∗ preserving the Lie bracket

27
whose dual map
ω : Λ2g → h∗
is a cocycle because h preserves the Lie bracket in g
• so we build the central extension g×ω h∗; i.e.,
[Xa, Xb] = fabcXc + ωab iH
i
relative to bases Xa, Hi and Hi for g, h and h∗, respectively.
• h acts on g×ω h∗ preserving the Lie bracket, so we can form the
double extension
d(g, h) = h n (g×ω h∗)

28
• the double extension admits an invariant metric

28
• the double extension admits an invariant metric
Xb Hj Hj
Xa gab 0 0Hi 0 Bij δj
i
Hi 0 δij 0

28
• the double extension admits an invariant metric
Xb Hj Hj
Xa gab 0 0Hi 0 Bij δj
i
Hi 0 δij 0
where Bij is any invariant symmetric bilinear form on h (not
necessarily nondegenerate).

28
• the double extension admits an invariant metric
Xb Hj Hj
Xa gab 0 0Hi 0 Bij δj
i
Hi 0 δij 0
where Bij is any invariant symmetric bilinear form on h (not
necessarily nondegenerate).
This construction is due to Medina and Revoy who proved an
important structure theorem.

29
The structure theorem of Medina and Revoy
A metric Lie algebra is indecomposable if it is not the direct sum of
two orthogonal ideals.

29
The structure theorem of Medina and Revoy
A metric Lie algebra is indecomposable if it is not the direct sum of
two orthogonal ideals.
Theorem (Medina–Revoy (1985)).

29
The structure theorem of Medina and Revoy
A metric Lie algebra is indecomposable if it is not the direct sum of
two orthogonal ideals.
Theorem (Medina–Revoy (1985)).An indecomposable metric Lie algebra is either

29
The structure theorem of Medina and Revoy
A metric Lie algebra is indecomposable if it is not the direct sum of
two orthogonal ideals.
Theorem (Medina–Revoy (1985)).An indecomposable metric Lie algebra is either simple

29
The structure theorem of Medina and Revoy
A metric Lie algebra is indecomposable if it is not the direct sum of
two orthogonal ideals.
Theorem (Medina–Revoy (1985)).An indecomposable metric Lie algebra is either simple, one-dimensional

29
The structure theorem of Medina and Revoy
A metric Lie algebra is indecomposable if it is not the direct sum of
two orthogonal ideals.
Theorem (Medina–Revoy (1985)).An indecomposable metric Lie algebra is either simple, one-dimensional, or a double extension d(g, h) where h is either simpleor one-dimensional.

29
The structure theorem of Medina and Revoy
A metric Lie algebra is indecomposable if it is not the direct sum of
two orthogonal ideals.
Theorem (Medina–Revoy (1985)).An indecomposable metric Lie algebra is either simple, one-dimensional, or a double extension d(g, h) where h is either simpleor one-dimensional.Every metric Lie algebra is obtained as an orthogonal direct sumof indecomposables.

30
Six-dimensional lorentzian Lie algebras
It is now easy to list all six-dimensional lorentzian Lie algebras.

30
Six-dimensional lorentzian Lie algebras
It is now easy to list all six-dimensional lorentzian Lie algebras.
Notice that if the metric on g has signature (p, q) and h is
r-dimensional, the metric on d(g, h) has signature (p + r, q + r).

30
Six-dimensional lorentzian Lie algebras
It is now easy to list all six-dimensional lorentzian Lie algebras.
Notice that if the metric on g has signature (p, q) and h is
r-dimensional, the metric on d(g, h) has signature (p + r, q + r).
Therefore a lorentzian Lie algebra takes the general form

30
Six-dimensional lorentzian Lie algebras
It is now easy to list all six-dimensional lorentzian Lie algebras.
Notice that if the metric on g has signature (p, q) and h is
r-dimensional, the metric on d(g, h) has signature (p + r, q + r).
Therefore a lorentzian Lie algebra takes the general form
reductive⊕ d(a, h)

30
Six-dimensional lorentzian Lie algebras
It is now easy to list all six-dimensional lorentzian Lie algebras.
Notice that if the metric on g has signature (p, q) and h is
r-dimensional, the metric on d(g, h) has signature (p + r, q + r).
Therefore a lorentzian Lie algebra takes the general form
reductive⊕ d(a, h)
where a is abelian with euclidean metric and h is one-dimensional.

30
Six-dimensional lorentzian Lie algebras
It is now easy to list all six-dimensional lorentzian Lie algebras.
Notice that if the metric on g has signature (p, q) and h is
r-dimensional, the metric on d(g, h) has signature (p + r, q + r).
Therefore a lorentzian Lie algebra takes the general form
reductive⊕ d(a, h)
where a is abelian with euclidean metric and h is one-dimensional.
(Any semisimple factors in a factor out of the double extension.
[FO–Stanciu hep-th/9402035])

31
Six-dimensional lorentzian Lie algebras:

31
Six-dimensional lorentzian Lie algebras:
• R5,1

31
Six-dimensional lorentzian Lie algebras:
• R5,1
• so(3)⊕ R2,1

31
Six-dimensional lorentzian Lie algebras:
• R5,1
• so(3)⊕ R2,1
• so(2, 1)⊕ R3

31
Six-dimensional lorentzian Lie algebras:
• R5,1
• so(3)⊕ R2,1
• so(2, 1)⊕ R3
• so(2, 1)⊕ so(3)

31
Six-dimensional lorentzian Lie algebras:
• R5,1
• so(3)⊕ R2,1
• so(2, 1)⊕ R3
• so(2, 1)⊕ so(3)
• d(R4, R)

31
Six-dimensional lorentzian Lie algebras:
• R5,1
• so(3)⊕ R2,1
• so(2, 1)⊕ R3
• so(2, 1)⊕ so(3)
• d(R4, R), actually a family of Lie algebras parametrised by
homomorphisms
R → Λ2R4 ∼= so(4)

32
Antiselfduality of the structure constants narrows the list down to

32
Antiselfduality of the structure constants narrows the list down to
• R5,1

32
Antiselfduality of the structure constants narrows the list down to
• R5,1
• so(2, 1)⊕ so(3) with “commensurate” metrics

32
Antiselfduality of the structure constants narrows the list down to
• R5,1
• so(2, 1)⊕ so(3) with “commensurate” metrics, and
• d(R4, R) with the image of R → Λ2R4 self-dual

32
Antiselfduality of the structure constants narrows the list down to
• R5,1
• so(2, 1)⊕ so(3) with “commensurate” metrics, and
• d(R4, R) with the image of R → Λ2R4 self-dual
The first case corresponds to the flat vacuum.

32
Antiselfduality of the structure constants narrows the list down to
• R5,1
• so(2, 1)⊕ so(3) with “commensurate” metrics, and
• d(R4, R) with the image of R → Λ2R4 self-dual
The first case corresponds to the flat vacuum. The second case
corresponds to AdS3×S3 with equal radii of curvature and
F ∝ dvol(AdS3) + dvol(S3)

32
Antiselfduality of the structure constants narrows the list down to
• R5,1
• so(2, 1)⊕ so(3) with “commensurate” metrics, and
• d(R4, R) with the image of R → Λ2R4 self-dual
The first case corresponds to the flat vacuum. The second case
corresponds to AdS3×S3 with equal radii of curvature and
F ∝ dvol(AdS3) + dvol(S3)
The third case is a six-dimensional version of the Nappi-Witten
spacetime, NW6, discovered by Meessen. [Meessen hep-th/0111031]

33
The vacua are related by Penrose limits:

33
The vacua are related by Penrose limits:
AdS3×S3

33
The vacua are related by Penrose limits:
AdS3×S3
NW6

33
The vacua are related by Penrose limits:
AdS3×S3
NW6
@@
@@
@@R
flat

33
The vacua are related by Penrose limits:
AdS3×S3
NW6
@@
@@
@@R
flat?

33
The vacua are related by Penrose limits:
AdS3×S3
NW6
@@
@@
@@R
flat?
which in this case are group contractions a la Inonu–Wigner.
[Stanciu–FO hep-th/0303212, Olive–Rabinovici–Schwimmer hep-th/9311081]
[Back]

34
(2, 0) D = 6 supergravity

34
(2, 0) D = 6 supergravity
• bosonic fields

34
(2, 0) D = 6 supergravity
• bosonic fields:
? metric g

34
(2, 0) D = 6 supergravity
• bosonic fields:
? metric g
? 5 anti-selfdual closed 3-form F i

34
(2, 0) D = 6 supergravity
• bosonic fields:
? metric g
? 5 anti-selfdual closed 3-form F i transforming in the 5-
dimensional representation of Sp(2) ∼= Spin(5)

34
(2, 0) D = 6 supergravity
• bosonic fields:
? metric g
? 5 anti-selfdual closed 3-form F i transforming in the 5-
dimensional representation of Sp(2) ∼= Spin(5)
for a total of 9 + 15 = 24 physical bosonic degrees of freedom

34
(2, 0) D = 6 supergravity
• bosonic fields:
? metric g
? 5 anti-selfdual closed 3-form F i transforming in the 5-
dimensional representation of Sp(2) ∼= Spin(5)
for a total of 9 + 15 = 24 physical bosonic degrees of freedom
• spinors are positive-chirality symplectic Majorana–Weyl

34
(2, 0) D = 6 supergravity
• bosonic fields:
? metric g
? 5 anti-selfdual closed 3-form F i transforming in the 5-
dimensional representation of Sp(2) ∼= Spin(5)
for a total of 9 + 15 = 24 physical bosonic degrees of freedom
• spinors are positive-chirality symplectic Majorana–Weyl; i.e.,
associated to the 16-dimensional real representation of
Spin(1, 5)× Sp(2) having positive six-dimensional chirality.

34
(2, 0) D = 6 supergravity
• bosonic fields:
? metric g
? 5 anti-selfdual closed 3-form F i transforming in the 5-
dimensional representation of Sp(2) ∼= Spin(5)
for a total of 9 + 15 = 24 physical bosonic degrees of freedom
• spinors are positive-chirality symplectic Majorana–Weyl; i.e.,
associated to the 16-dimensional real representation of
Spin(1, 5)× Sp(2) having positive six-dimensional chirality.
The gravitino has therefore also 24 physical degrees of freedom.

35
• The gravitino variation yields the connection
Dµ = ∇µ + 18Fµνρ
iγiΓνρ

35
• The gravitino variation yields the connection
Dµ = ∇µ + 18Fµνρ
iγiΓνρ
Maximal supersymmetry =⇒ D is flat

35
• The gravitino variation yields the connection
Dµ = ∇µ + 18Fµνρ
iγiΓνρ
Maximal supersymmetry =⇒ D is flat =⇒
• F iµνρ = Fµνρv
i

35
• The gravitino variation yields the connection
Dµ = ∇µ + 18Fµνρ
iγiΓνρ
Maximal supersymmetry =⇒ D is flat =⇒
• F iµνρ = Fµνρv
i, where F is an antiself-dual 3-form and v some
constant unit vector

35
• The gravitino variation yields the connection
Dµ = ∇µ + 18Fµνρ
iγiΓνρ
Maximal supersymmetry =⇒ D is flat =⇒
• F iµνρ = Fµνρv
i, where F is an antiself-dual 3-form and v some
constant unit vector
• (g, F ) is a vacuum solution of the (1, 0) theory

35
• The gravitino variation yields the connection
Dµ = ∇µ + 18Fµνρ
iγiΓνρ
Maximal supersymmetry =⇒ D is flat =⇒
• F iµνρ = Fµνρv
i, where F is an antiself-dual 3-form and v some
constant unit vector
• (g, F ) is a vacuum solution of the (1, 0) theory
=⇒ (1, 0) vacua ↔ (2, 0) vacua up to Sp(2) R-symmetry.

36
D = 10 IIB supergravity
• bosonic fields:

36
D = 10 IIB supergravity
• bosonic fields:
? metric g

36
D = 10 IIB supergravity
• bosonic fields:
? metric g,
? complex scalar τ

36
D = 10 IIB supergravity
• bosonic fields:
? metric g,
? complex scalar τ ,
? closed complex 3-form H

36
D = 10 IIB supergravity
• bosonic fields:
? metric g,
? complex scalar τ ,
? closed complex 3-form H, and
? closed selfdual 5-form F

36
D = 10 IIB supergravity
• bosonic fields:
? metric g,
? complex scalar τ ,
? closed complex 3-form H, and
? closed selfdual 5-form F
=⇒ 35+2+56+35 = 128 bosonic physical degrees of freedom

36
D = 10 IIB supergravity
• bosonic fields:
? metric g,
? complex scalar τ ,
? closed complex 3-form H, and
? closed selfdual 5-form F
=⇒ 35+2+56+35 = 128 bosonic physical degrees of freedom
• spinors are positive-chirality Majorana–Weyl spinors.
There are two gravitini and two dilatini

36
D = 10 IIB supergravity
• bosonic fields:
? metric g,
? complex scalar τ ,
? closed complex 3-form H, and
? closed selfdual 5-form F
=⇒ 35+2+56+35 = 128 bosonic physical degrees of freedom
• spinors are positive-chirality Majorana–Weyl spinors.
There are two gravitini and two dilatini
=⇒ 112 + 16 = 128 fermionic physical degrees of freedom

37
• the dilatino variation gives rise to an algebraic Killing spinor
equation

37
• the dilatino variation gives rise to an algebraic Killing spinor
equation
Maximal supersymmetry =⇒ τ is constant and H = 0

37
• the dilatino variation gives rise to an algebraic Killing spinor
equation
Maximal supersymmetry =⇒ τ is constant and H = 0
• the gravitino variation defines the connection

37
• the dilatino variation gives rise to an algebraic Killing spinor
equation
Maximal supersymmetry =⇒ τ is constant and H = 0
• the gravitino variation defines the connection
(with H = 0 and τ constant)

37
• the dilatino variation gives rise to an algebraic Killing spinor
equation
Maximal supersymmetry =⇒ τ is constant and H = 0
• the gravitino variation defines the connection
(with H = 0 and τ constant)
Dµ = ∇µ + iαFν1ν2ν3ν4ν5Γν1ν2ν3ν4ν5Γµ

37
• the dilatino variation gives rise to an algebraic Killing spinor
equation
Maximal supersymmetry =⇒ τ is constant and H = 0
• the gravitino variation defines the connection
(with H = 0 and τ constant)
Dµ = ∇µ + iαFν1ν2ν3ν4ν5Γν1ν2ν3ν4ν5Γµ
where we have written the two real spinors as a complex spinor

37
• the dilatino variation gives rise to an algebraic Killing spinor
equation
Maximal supersymmetry =⇒ τ is constant and H = 0
• the gravitino variation defines the connection
(with H = 0 and τ constant)
Dµ = ∇µ + iαFν1ν2ν3ν4ν5Γν1ν2ν3ν4ν5Γµ
where we have written the two real spinors as a complex spinor,
and α depends on the constant value of τ .

38
Expanding the curvature of D into antisymmetric products of
Γ-matrices

38
Expanding the curvature of D into antisymmetric products of
Γ-matrices and setting the coefficients to zero

38
Expanding the curvature of D into antisymmetric products of
Γ-matrices and setting the coefficients to zero, we find
• F is parallel

38
Expanding the curvature of D into antisymmetric products of
Γ-matrices and setting the coefficients to zero, we find
• F is parallel: ∇F = 0

38
Expanding the curvature of D into antisymmetric products of
Γ-matrices and setting the coefficients to zero, we find
• F is parallel: ∇F = 0
• the Riemann curvature tensor is again determined algebraically in
terms of F and g

38
Expanding the curvature of D into antisymmetric products of
Γ-matrices and setting the coefficients to zero, we find
• F is parallel: ∇F = 0
• the Riemann curvature tensor is again determined algebraically in
terms of F and g:
Rµνρσ = Tµνρσ(F, g)
with T quadratic in F

38
Expanding the curvature of D into antisymmetric products of
Γ-matrices and setting the coefficients to zero, we find
• F is parallel: ∇F = 0
• the Riemann curvature tensor is again determined algebraically in
terms of F and g:
Rµνρσ = Tµνρσ(F, g)
with T quadratic in F . Again this means that Rµνρσ is parallel

38
Expanding the curvature of D into antisymmetric products of
Γ-matrices and setting the coefficients to zero, we find
• F is parallel: ∇F = 0
• the Riemann curvature tensor is again determined algebraically in
terms of F and g:
Rµνρσ = Tµνρσ(F, g)
with T quadratic in F . Again this means that Rµνρσ is parallel,
so that g is locally symmetric.

39
• F obeys a quadratic identity

39
• F obeys a quadratic identity:
Fρ ∧ F ρ = 0

39
• F obeys a quadratic identity:
Fρ ∧ F ρ = 0 or Fµ1µ2µ3ρ[ν1F ρ
ν2ν3ν4ν5] = 0

39
• F obeys a quadratic identity:
Fρ ∧ F ρ = 0 or Fµ1µ2µ3ρ[ν1F ρ
ν2ν3ν4ν5] = 0
generalising both the Plucker relations

39
• F obeys a quadratic identity:
Fρ ∧ F ρ = 0 or Fµ1µ2µ3ρ[ν1F ρ
ν2ν3ν4ν5] = 0
generalising both the Plucker relations and the Jacobi identity.

39
• F obeys a quadratic identity:
Fρ ∧ F ρ = 0 or Fµ1µ2µ3ρ[ν1F ρ
ν2ν3ν4ν5] = 0
generalising both the Plucker relations and the Jacobi identity.
Again we can work in the tangent space at a point

39
• F obeys a quadratic identity:
Fρ ∧ F ρ = 0 or Fµ1µ2µ3ρ[ν1F ρ
ν2ν3ν4ν5] = 0
generalising both the Plucker relations and the Jacobi identity.
Again we can work in the tangent space at a point, where g gives
rise to a lorentzian innner product

39
• F obeys a quadratic identity:
Fρ ∧ F ρ = 0 or Fµ1µ2µ3ρ[ν1F ρ
ν2ν3ν4ν5] = 0
generalising both the Plucker relations and the Jacobi identity.
Again we can work in the tangent space at a point, where g gives
rise to a lorentzian innner product and F defines a self-dual 5-form
obeying a quadratic equation.

39
• F obeys a quadratic identity:
Fρ ∧ F ρ = 0 or Fµ1µ2µ3ρ[ν1F ρ
ν2ν3ν4ν5] = 0
generalising both the Plucker relations and the Jacobi identity.
Again we can work in the tangent space at a point, where g gives
rise to a lorentzian innner product and F defines a self-dual 5-form
obeying a quadratic equation.
This equation defines a generalisation of a Lie algebra known as a
4-Lie algebra (with an invariant metric). [Filippov (1985)]

39
• F obeys a quadratic identity:
Fρ ∧ F ρ = 0 or Fµ1µ2µ3ρ[ν1F ρ
ν2ν3ν4ν5] = 0
generalising both the Plucker relations and the Jacobi identity.
Again we can work in the tangent space at a point, where g gives
rise to a lorentzian innner product and F defines a self-dual 5-form
obeying a quadratic equation.
This equation defines a generalisation of a Lie algebra known as a
4-Lie algebra (with an invariant metric). [Filippov (1985)]
(Unfortunate notation: a 2-Lie algebra is a Lie algebra.)

40
n-Lie algebras

40
n-Lie algebras
A Lie algebra is a vector space g

40
n-Lie algebras
A Lie algebra is a vector space g together with an antisymmetric
bilinear map
[ ] : Λ2g → g

40
n-Lie algebras
A Lie algebra is a vector space g together with an antisymmetric
bilinear map
[ ] : Λ2g → g
satisfying the condition

40
n-Lie algebras
A Lie algebra is a vector space g together with an antisymmetric
bilinear map
[ ] : Λ2g → g
satisfying the condition: for all X ∈ g the map
adX : g → g defined by adX Y = [X, Y ]

40
n-Lie algebras
A Lie algebra is a vector space g together with an antisymmetric
bilinear map
[ ] : Λ2g → g
satisfying the condition: for all X ∈ g the map
adX : g → g defined by adX Y = [X, Y ]
is a derivation over [ ]

40
n-Lie algebras
A Lie algebra is a vector space g together with an antisymmetric
bilinear map
[ ] : Λ2g → g
satisfying the condition: for all X ∈ g the map
adX : g → g defined by adX Y = [X, Y ]
is a derivation over [ ]; that is,
[X, [Y, Z]] = [[X, Y ], Z] + [Y, [X, Z]]

41
An n-Lie algebra

41
An n-Lie algebra is a vector space n

41
An n-Lie algebra is a vector space n together with an
antisymmetric n-linear map

41
An n-Lie algebra is a vector space n together with an
antisymmetric n-linear map
[ ] : Λnn → n

41
An n-Lie algebra is a vector space n together with an
antisymmetric n-linear map
[ ] : Λnn → n
satisfying the condition

41
An n-Lie algebra is a vector space n together with an
antisymmetric n-linear map
[ ] : Λnn → n
satisfying the condition: for all X1, . . . , Xn−1 ∈ n

41
An n-Lie algebra is a vector space n together with an
antisymmetric n-linear map
[ ] : Λnn → n
satisfying the condition: for all X1, . . . , Xn−1 ∈ n, the map
adX1,...,Xn−1 : n → n

41
An n-Lie algebra is a vector space n together with an
antisymmetric n-linear map
[ ] : Λnn → n
satisfying the condition: for all X1, . . . , Xn−1 ∈ n, the map
adX1,...,Xn−1 : n → n
defined by
adX1,...,Xn−1 Y = [X1, . . . , Xn−1, Y ]

42
is a derivation over [ ]

42
is a derivation over [ ]; that is,
[X1, . . . , Xn−1, [Y1, . . . , Yn]] =n∑
i=1
[Y1, . . . , [X1, . . . , Xn−1, Yi], . . . , Yn]

42
is a derivation over [ ]; that is,
[X1, . . . , Xn−1, [Y1, . . . , Yn]] =n∑
i=1
[Y1, . . . , [X1, . . . , Xn−1, Yi], . . . , Yn]
If 〈−,−〉 is a metric on n, we can define F by
F (X1, . . . , Xn+1) = 〈[X1, . . . , Xn], Xn+1〉

42
is a derivation over [ ]; that is,
[X1, . . . , Xn−1, [Y1, . . . , Yn]] =n∑
i=1
[Y1, . . . , [X1, . . . , Xn−1, Yi], . . . , Yn]
If 〈−,−〉 is a metric on n, we can define F by
F (X1, . . . , Xn+1) = 〈[X1, . . . , Xn], Xn+1〉
If F is totally antisymmetric then 〈−,−〉 is an invariant metric.

42
is a derivation over [ ]; that is,
[X1, . . . , Xn−1, [Y1, . . . , Yn]] =n∑
i=1
[Y1, . . . , [X1, . . . , Xn−1, Yi], . . . , Yn]
If 〈−,−〉 is a metric on n, we can define F by
F (X1, . . . , Xn+1) = 〈[X1, . . . , Xn], Xn+1〉
If F is totally antisymmetric then 〈−,−〉 is an invariant metric.
(n-Lie algebras also appear naturally in the context of Nambu
dynamics. [Nambu (1973)])

43
Ten-dimensional lorentzian 4-Lie algebras
In this language, IIB vacua are in one-to-one correspondence with
ten-dimensional selfdual lorentzian 4-Lie algebras

43
Ten-dimensional lorentzian 4-Lie algebras
In this language, IIB vacua are in one-to-one correspondence with
ten-dimensional selfdual lorentzian 4-Lie algebras; but this is not
particularly helpful since the theory of n-Lie algebras is still largely
undeveloped.

43
Ten-dimensional lorentzian 4-Lie algebras
In this language, IIB vacua are in one-to-one correspondence with
ten-dimensional selfdual lorentzian 4-Lie algebras; but this is not
particularly helpful since the theory of n-Lie algebras is still largely
undeveloped.
One is forced to solve the equations.

43
Ten-dimensional lorentzian 4-Lie algebras
In this language, IIB vacua are in one-to-one correspondence with
ten-dimensional selfdual lorentzian 4-Lie algebras; but this is not
particularly helpful since the theory of n-Lie algebras is still largely
undeveloped.
One is forced to solve the equations. After a lot of work, we
found that a selfdual 5-form obeys the equation if and only if

43
Ten-dimensional lorentzian 4-Lie algebras
In this language, IIB vacua are in one-to-one correspondence with
ten-dimensional selfdual lorentzian 4-Lie algebras; but this is not
particularly helpful since the theory of n-Lie algebras is still largely
undeveloped.
One is forced to solve the equations. After a lot of work, we
found that a selfdual 5-form obeys the equation if and only if
F = G + ?G

43
Ten-dimensional lorentzian 4-Lie algebras
In this language, IIB vacua are in one-to-one correspondence with
ten-dimensional selfdual lorentzian 4-Lie algebras; but this is not
particularly helpful since the theory of n-Lie algebras is still largely
undeveloped.
One is forced to solve the equations. After a lot of work, we
found that a selfdual 5-form obeys the equation if and only if
F = G + ?G where G = θ1 ∧ θ2 ∧ θ3 ∧ θ4 ∧ θ5

43
Ten-dimensional lorentzian 4-Lie algebras
In this language, IIB vacua are in one-to-one correspondence with
ten-dimensional selfdual lorentzian 4-Lie algebras; but this is not
particularly helpful since the theory of n-Lie algebras is still largely
undeveloped.
One is forced to solve the equations. After a lot of work, we
found that a selfdual 5-form obeys the equation if and only if
F = G + ?G where G = θ1 ∧ θ2 ∧ θ3 ∧ θ4 ∧ θ5
[FO–Papadopoulos math.AG/0211170]

44
G is decomposable;

44
G is decomposable; whence, if nonzero

44
G is decomposable; whence, if nonzero, it defines a 5-plane

44
G is decomposable; whence, if nonzero, it defines a 5-plane, and
hence F defines two orthogonal planes.

44
G is decomposable; whence, if nonzero, it defines a 5-plane, and
hence F defines two orthogonal planes.
If F = 0 we recover the flat vacuum.

44
G is decomposable; whence, if nonzero, it defines a 5-plane, and
hence F defines two orthogonal planes.
If F = 0 we recover the flat vacuum. Otherwise there are two
possibilities:

44
G is decomposable; whence, if nonzero, it defines a 5-plane, and
hence F defines two orthogonal planes.
If F = 0 we recover the flat vacuum. Otherwise there are two
possibilities:
• one plane is lorentzian and the other euclidean

44
G is decomposable; whence, if nonzero, it defines a 5-plane, and
hence F defines two orthogonal planes.
If F = 0 we recover the flat vacuum. Otherwise there are two
possibilities:
• one plane is lorentzian and the other euclidean: we can choose a
pseudo-orthonormal frame in which the only nonzero components
of F are F01234 = F56789

44
G is decomposable; whence, if nonzero, it defines a 5-plane, and
hence F defines two orthogonal planes.
If F = 0 we recover the flat vacuum. Otherwise there are two
possibilities:
• one plane is lorentzian and the other euclidean: we can choose a
pseudo-orthonormal frame in which the only nonzero components
of F are F01234 = F56789, or
• both planes are null

44
G is decomposable; whence, if nonzero, it defines a 5-plane, and
hence F defines two orthogonal planes.
If F = 0 we recover the flat vacuum. Otherwise there are two
possibilities:
• one plane is lorentzian and the other euclidean: we can choose a
pseudo-orthonormal frame in which the only nonzero components
of F are F01234 = F56789, or
• both planes are null: we can choose a pseudo-orthonormal frame
in which the only nonzero components of F are F−1234 = F−5678.

45
Plugging these expressions back into the relation between the
curvature tensor to F and g

45
Plugging these expressions back into the relation between the
curvature tensor to F and g, one finds the following backgrounds
(up to local isometry)

45
Plugging these expressions back into the relation between the
curvature tensor to F and g, one finds the following backgrounds
(up to local isometry):
• F non-degenerate case

45
Plugging these expressions back into the relation between the
curvature tensor to F and g, one finds the following backgrounds
(up to local isometry):
• F non-degenerate case: a one-parameter (R > 0) family of vacua
AdS5(−R)× S5(R) F =
√4R
5(dvol(AdS5)− dvol(S5)
)

45
Plugging these expressions back into the relation between the
curvature tensor to F and g, one finds the following backgrounds
(up to local isometry):
• F non-degenerate case: a one-parameter (R > 0) family of vacua
AdS5(−R)× S5(R) F =
√4R
5(dvol(AdS5)− dvol(S5)
)
• F degenerate

45
Plugging these expressions back into the relation between the
curvature tensor to F and g, one finds the following backgrounds
(up to local isometry):
• F non-degenerate case: a one-parameter (R > 0) family of vacua
AdS5(−R)× S5(R) F =
√4R
5(dvol(AdS5)− dvol(S5)
)
• F degenerate: a one-parameter (µ ∈ R) family of symmetric

46
plane waves:
g = 2dx+dx− − 14µ
28∑
i=1
(xi)2(dx−)2 +8∑
i=1
(dxi)2

46
plane waves:
g = 2dx+dx− − 14µ
28∑
i=1
(xi)2(dx−)2 +8∑
i=1
(dxi)2
F = 12µdx− ∧
(dx1 ∧ dx2 ∧ dx3 ∧ dx4 + dx5 ∧ dx6 ∧ dx7 ∧ dx8
)

46
plane waves:
g = 2dx+dx− − 14µ
28∑
i=1
(xi)2(dx−)2 +8∑
i=1
(dxi)2
F = 12µdx− ∧
(dx1 ∧ dx2 ∧ dx3 ∧ dx4 + dx5 ∧ dx6 ∧ dx7 ∧ dx8
)Again for µ = 0 we recover the flat space solution

46
plane waves:
g = 2dx+dx− − 14µ
28∑
i=1
(xi)2(dx−)2 +8∑
i=1
(dxi)2
F = 12µdx− ∧
(dx1 ∧ dx2 ∧ dx3 ∧ dx4 + dx5 ∧ dx6 ∧ dx7 ∧ dx8
)Again for µ = 0 we recover the flat space solution; whereas for
µ 6= 0 all solutions are isometric to the same plane wave
[Blau–FO–Hull–Papadopoulos hep-th/0110242]

46
plane waves:
g = 2dx+dx− − 14µ
28∑
i=1
(xi)2(dx−)2 +8∑
i=1
(dxi)2
F = 12µdx− ∧
(dx1 ∧ dx2 ∧ dx3 ∧ dx4 + dx5 ∧ dx6 ∧ dx7 ∧ dx8
)Again for µ = 0 we recover the flat space solution; whereas for
µ 6= 0 all solutions are isometric to the same plane wave
[Blau–FO–Hull–Papadopoulos hep-th/0110242]
Notice that g is a bi-invariant metric on a Lie group

46
plane waves:
g = 2dx+dx− − 14µ
28∑
i=1
(xi)2(dx−)2 +8∑
i=1
(dxi)2
F = 12µdx− ∧
(dx1 ∧ dx2 ∧ dx3 ∧ dx4 + dx5 ∧ dx6 ∧ dx7 ∧ dx8
)Again for µ = 0 we recover the flat space solution; whereas for
µ 6= 0 all solutions are isometric to the same plane wave
[Blau–FO–Hull–Papadopoulos hep-th/0110242]
Notice that g is a bi-invariant metric on a Lie group: a
ten-dimensional version of the Nappi–Witten spacetime.
[Stanciu–FO hep-th/0303212]

47
These vacua again embed isometrically in E2,10 as intersections of
quadrics

47
These vacua again embed isometrically in E2,10 as intersections of
quadrics, and are related by Penrose limits

47
These vacua again embed isometrically in E2,10 as intersections of
quadrics, and are related by Penrose limits
[Blau–FO–Hull–Papadopoulos hep-th/0201081]
[Berenstein–Maldacena–Nastase hep-th/0202021]
AdS5×S5

47
These vacua again embed isometrically in E2,10 as intersections of
quadrics, and are related by Penrose limits
[Blau–FO–Hull–Papadopoulos hep-th/0201081]
[Berenstein–Maldacena–Nastase hep-th/0202021]
AdS5×S5
BFHP

47
These vacua again embed isometrically in E2,10 as intersections of
quadrics, and are related by Penrose limits
[Blau–FO–Hull–Papadopoulos hep-th/0201081]
[Berenstein–Maldacena–Nastase hep-th/0202021]
AdS5×S5
BFHP
@@
@@
@@R
flat

47
These vacua again embed isometrically in E2,10 as intersections of
quadrics, and are related by Penrose limits
[Blau–FO–Hull–Papadopoulos hep-th/0201081]
[Berenstein–Maldacena–Nastase hep-th/0202021]
AdS5×S5
BFHP
@@
@@
@@R
flat?
[Back]

48
Other theories

48
Other theories
• D=10: I, heterotic, IIA

48
Other theories
• D=10: I, heterotic, IIA only have the flat vacuum.

48
Other theories
• D=10: I, heterotic, IIA only have the flat vacuum. The same is
true for any theory lower in the corresponding columns.

48
Other theories
• D=10: I, heterotic, IIA only have the flat vacuum. The same is
true for any theory lower in the corresponding columns. (Roman’s
massive supergravity has not vacua at all.)

48
Other theories
• D=10: I, heterotic, IIA only have the flat vacuum. The same is
true for any theory lower in the corresponding columns. (Roman’s
massive supergravity has not vacua at all.)
• D=6: (1, 0) vacua do have reductions preserving all
supersymmetry.
[Gauntlett–Gutowsky–Hull–Pakis–Reall hep-th/0209114]
[Lozano-Tellechea–Meessen–Ortın hep-th/0206200]

48
Other theories
• D=10: I, heterotic, IIA only have the flat vacuum. The same is
true for any theory lower in the corresponding columns. (Roman’s
massive supergravity has not vacua at all.)
• D=6: (1, 0) vacua do have reductions preserving all
supersymmetry.
[Gauntlett–Gutowsky–Hull–Pakis–Reall hep-th/0209114]
[Lozano-Tellechea–Meessen–Ortın hep-th/0206200]
This now has a natural explanation.

49
D=5 N=2 from D=6 (1, 0)

49
D=5 N=2 from D=6 (1, 0)
D=6 (1, 0) D=5 N=2 coupled to a vector multiplet

49
D=5 N=2 from D=6 (1, 0)
D=6 (1, 0) D=5 N=2 coupled to a vector multiplet:
(g, F3) (h, φ, F2, G2)

49
D=5 N=2 from D=6 (1, 0)
D=6 (1, 0) D=5 N=2 coupled to a vector multiplet:
(g, F3) (h, φ, F2, G2)
Minimal D=5 N=2 requires a truncation

49
D=5 N=2 from D=6 (1, 0)
D=6 (1, 0) D=5 N=2 coupled to a vector multiplet:
(g, F3) (h, φ, F2, G2)
Minimal D=5 N=2 requires a truncation
dφ = 0 F2 = G2

49
D=5 N=2 from D=6 (1, 0)
D=6 (1, 0) D=5 N=2 coupled to a vector multiplet:
(g, F3) (h, φ, F2, G2)
Minimal D=5 N=2 requires a truncation
dφ = 0 F2 = G2
Let (M, g, F ) be a vacuum solution of D=6 (1, 0)

49
D=5 N=2 from D=6 (1, 0)
D=6 (1, 0) D=5 N=2 coupled to a vector multiplet:
(g, F3) (h, φ, F2, G2)
Minimal D=5 N=2 requires a truncation
dφ = 0 F2 = G2
Let (M, g, F ) be a vacuum solution of D=6 (1, 0): (M, g) a
parallelised (anti-selfdual, lorentzian) Lie group with torsion F .

50
Let ξ be a (spacelike) left-invariant vector field

50
Let ξ be a (spacelike) left-invariant vector field, with corresponding
one-parameter subgroup K:

50
Let ξ be a (spacelike) left-invariant vector field, with corresponding
one-parameter subgroup K:
• Kaluza–Klein reduction yields space M/K of right K-cosets

50
Let ξ be a (spacelike) left-invariant vector field, with corresponding
one-parameter subgroup K:
• Kaluza–Klein reduction yields space M/K of right K-cosets
• ξ leaves invariant all Killing spinors

50
Let ξ be a (spacelike) left-invariant vector field, with corresponding
one-parameter subgroup K:
• Kaluza–Klein reduction yields space M/K of right K-cosets
• ξ leaves invariant all Killing spinors
• truncation is automatic

50
Let ξ be a (spacelike) left-invariant vector field, with corresponding
one-parameter subgroup K:
• Kaluza–Klein reduction yields space M/K of right K-cosets
• ξ leaves invariant all Killing spinors
• truncation is automatic
• all vacua of minimal D=5 N=2 supergravity arise in this way:

50
Let ξ be a (spacelike) left-invariant vector field, with corresponding
one-parameter subgroup K:
• Kaluza–Klein reduction yields space M/K of right K-cosets
• ξ leaves invariant all Killing spinors
• truncation is automatic
• all vacua of minimal D=5 N=2 supergravity arise in this way:
AdS2×S3 ↔ AdS3×S2

50
Let ξ be a (spacelike) left-invariant vector field, with corresponding
one-parameter subgroup K:
• Kaluza–Klein reduction yields space M/K of right K-cosets
• ξ leaves invariant all Killing spinors
• truncation is automatic
• all vacua of minimal D=5 N=2 supergravity arise in this way:
AdS2×S3 ↔ AdS3×S2, E1,4

50
Let ξ be a (spacelike) left-invariant vector field, with corresponding
one-parameter subgroup K:
• Kaluza–Klein reduction yields space M/K of right K-cosets
• ξ leaves invariant all Killing spinors
• truncation is automatic
• all vacua of minimal D=5 N=2 supergravity arise in this way:
AdS2×S3 ↔ AdS3×S2, E1,4, KG5

50
Let ξ be a (spacelike) left-invariant vector field, with corresponding
one-parameter subgroup K:
• Kaluza–Klein reduction yields space M/K of right K-cosets
• ξ leaves invariant all Killing spinors
• truncation is automatic
• all vacua of minimal D=5 N=2 supergravity arise in this way:
AdS2×S3 ↔ AdS3×S2, E1,4, KG5, Godel

50
Let ξ be a (spacelike) left-invariant vector field, with corresponding
one-parameter subgroup K:
• Kaluza–Klein reduction yields space M/K of right K-cosets
• ξ leaves invariant all Killing spinors
• truncation is automatic
• all vacua of minimal D=5 N=2 supergravity arise in this way:
AdS2×S3 ↔ AdS3×S2, E1,4, KG5, Godel, ...

51
Thank you.