
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003...
36
http://math.asu.edu/~kawski [email protected] Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003 Visualizing Agrachëv’s curvature of optimal control Matthias Kawski and Eric Gehrig Arizona State University Tempe, U.S.A. This work was partially supported by NSF grant DMS 00-72369.
-
date post
19-Dec-2015 -
Category
Documents
-
view
226 -
download
0
Transcript of Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003...

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
Visualizing Agrachëv’s curvature of optimal control
Matthias Kawski
and Eric Gehrig
Arizona State University
Tempe, U.S.A.
This work was partially supported by NSF grant DMS 00-72369.

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
Outline• Motivation of this work• Brief review of some of Agrachëv’s theory, and
of last year’s work by Ulysse Serres• Some comments on ComputerAlgebraSystems
“ideally suited” “practically impossible”• Current efforts to “see” curvature of optimal cntrl.
– how to read our pictures– what one may be able to see in our pictures
• Conclusion: A useful approach? Promising 4 what?

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
Purpose/use of curvature in opt.cntrl
Maximum principle provides comparatively straightforward necessary conditions for optimality,
sufficient conditions are in general harder to
come by, and often comparatively harder to apply.
Curvature (w/ corresponding comparison theorem)suggest an elegant geometric alternative to obtain verifiable sufficient conditions for optimality
compare classical Riemannian geometry

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
Curvature of optimal control
•understand the geometry•develop intuition in basic examples•apply to obtain new optimality results

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
Classical geometry: Focusing geodesics
Positive curvature focuses geodesics, negative curvature “spreads them out”.
Thm.: curvature negative geodesics (extremals) are optimal (minimizers)
The imbedded surfaces view, and the color-coded intrinsic curvature view

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
Definition versus formula
A most simple geometric definition
- beautiful and elegant.
but the formula in coordinates is incomprehensible
(compare classical curvature…)
(formula from Ulysse Serres, 2001)

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
Aside: other interests / plans
• What is theoretically /practically feasible to compute w/ reasonable resources? (e.g. CAS: “simplify”, old: “controllability is NP-hard”, MK 1991)
• Interactive visualization in only your browser…– “CAS-light” inside JAVA
(e.g. set up geodesic eqns)– “real-time” computation of
geodesic spheres(e.g. “drag” initial point w/
mouse, or continuously vary
parameters…)
“bait”, “hook”, like Mandelbrot fractals….
Riemannian, circular parabloid

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
References
• Andrei Agrachev: “On the curvature of control systems”
(abstract, SISSA 2000)
• Andrei Agrachev and Yu. Sachkov:
“Lectures on Geometric Control Theory”, 2001, SISSA.
• Ulysse Serres: “On the curvature of two-dimensional
control problems and Zermelo’s navigation problem”.
(Ph.D. thesis at SISSA) ONGOING WORK ???

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
From: Agrachev / Sachkov: “Lectures on Geometric Control Theory”, 2001

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
From: Agrachev / Sachkov: “Lectures on Geometric Control Theory”, 2001

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
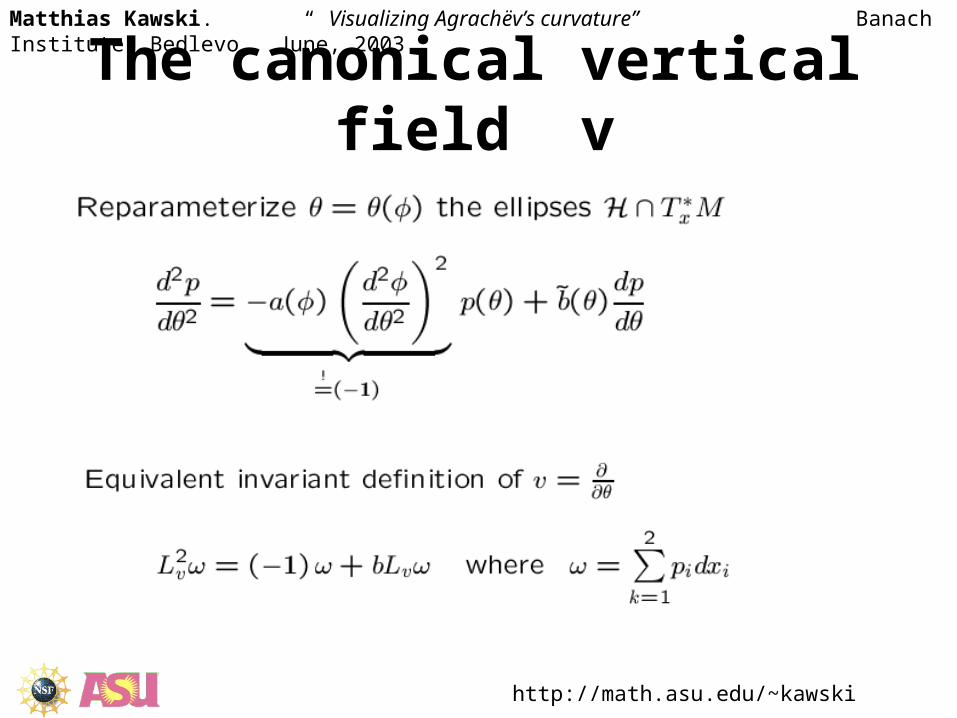
Next: Define distinguished parameterization of H x
From: Agrachev / Sachkov: “Lectures on Geometric Control Theory”, 2001
http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
The canonical vertical field v

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
From: Agrachev / Sachkov: “Lectures on Geometric Control Theory”, 2001

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
Jacobi equation in moving frameFrame
or:

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
Zermelo’s navigation problem
“Zermelo’s navigation formula”

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
formula for curvature ?
total of 782 (279) terms in num, 23 (7) in denom. MAPLE can’t factor…

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
Use U. Serre’s form of formula
so far have still been unable to coax MAPLE into obtaining
this without doing all “simplification” steps manually
polynomial in f and first 2 derivatives, trig polynomial in , interplay of 4 harmonics

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
First pictures: fields of polar plots
• On the left: the drift-vector field (“wind”)
• On the right: field of polar plots of (x1,x2,)
in Zermelo’s problem u* = . (polar coord on fibre)
polar plots normalized and color enhanced: unit circle zero curvature
negative curvature inside greenish positive curvature outside pinkish

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
Example: F(x,y) = [sech(x),0]
NOT globally scaled. colors for + and - scaled independently.

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
Example: F(x,y) = [0, sech(x)]
NOT globally scaled. colors for + and - scaled independently.
Question: What do optimal paths look like? Conjugate points?

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
Example: F(x,y) = [ - tanh(x), 0]
NOT globally scaled. colors for + and - scaled independently.

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
From now on: color code only(i.e., omit radial plots)

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
Special case: linear drift
• linear drift F(x)=Ax, i.e., (dx/dt)=Ax+eiu
• Curvature is independent of the base point x, study dependence on parameters of the drift
(x1,x2,) = ()
This case is being studied in detail by U.Serres.Here we only give a small taste of the richness
of even this very special simple class of systems

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
Linear drift, preparation I
• (as expected), curvature commutes with rotations
quick CAS check: , ,B
( )cos ( )sin
( )sin ( )cos
a b
c d
( )cos ( )sin
( )sin ( )cos
kB19 a d
16
3
8d
2( )cos 2 2 3
4b
2( )cos 2 2 3
4c2
( )cos 2 2 3
8a
2( )cos 2 2 3
32c
2( )cos 4 4 :=
3
32b
2( )cos 4 4 3
8c a ( )sin 2 2 21 c b
16
9
8b a ( )sin 2 2 9
8c d ( )sin 2 2 23 a
2
32
21 b2
32
23 d2
32
3
32d
2( )cos 4 4 3
32a
2( )cos 4 4 3
16c a ( )sin 4 4 3
16c d ( )sin 4 4 3
16b a ( )sin 4 4
3
16a d ( )cos 4 4 3
16c b ( )cos 4 4 3
16d b ( )sin 4 4 3
8d b ( )sin 2 2 21 c
2
32
> k['B']:=combine(simplify(zerm(Bxy,x,y,theta),trig));

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
Linear drift, preparation II
• (as expected), curvature scales with eigenvalues(homogeneous of deg 2 in space of eigenvalues)
quick CAS check:
:= kdiag 23 ( ) 2
32
4
3
8( )cos 2 ( )2 2 3
32( )cos 4 ( ) ( )
> kdiag:=zerm(lambda*x,mu*y,x,y,theta);
Note: is even and also depends only on even harmonics of

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
Linear drift
• if drift linear and ortho-gonally diagonalizable then no conjugate pts(see U. Serres’ for proof, here suggestive picture only)
> kdiag:=zerm(x,lambda*y,x,y,theta);
:= kdiag 23 ( )1 2
32
4
3
8( )cos 2 ( ) 1 2 3
32( )cos 4 ( ) 1 ( )1

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
Linear drift
• if linear drift has non-trivial Jordan block then a little bit ofpositive curvature exists
• Q: enough pos curv forexistence of conjugate pts?
> kjord:=zerm(lambda*x+y,lambda*y,x,y,theta);
:= kjord 21
32
2
4
3
4( )cos 2 3
4( )sin 2 3
32( )cos 4

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
Some linear drifts
jordan w/ =13/12
diag w/ =10,-1
diag w/ =1+i,1-i
Question: Which case is good for optimal control?

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
Ex: A=[1 1; 0 1]. very little pos curv

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
Scalings: + / - , local / globalsame scale for pos.& neg. parts
pos.& neg. parts color-scaled independently
local
color-scales,
each fibre
independ.
global
color-scale,
same for
every fibre
here: F(x) = ( 0, sech(3*x1))

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
Example:F(x)=[0,sech(3x)]
scaled locally / globally

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
F(x)=[0,sech(3x)]
globally scaled. colors for + and - scaled simultaneously.

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
F(x)=[0,sech(3x)]
globally scaled. colors for + and - scaled simultaneously.

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003
Conclusion
• Curvature of control: beautiful subjectpromising to yield new sufficiency results
• Even most simple classes of systems far from understood• CAS and interactive visualization promise to be useful
tools to scan entire classes of systems for interesting, “proof-worthy” properties.
• Some CAS open problems (“simplify”). Numerically fast implementation for JAVA????
• Zermelo’s problem particularly nice because everyone has intuitive understanding, wants to argue which way is best, then see and compare to the true optimal trajectories.

http://math.asu.edu/~kawski [email protected]
Matthias Kawski. “ Visualizing Agrachëv’s curvature” Banach Institute, Bedlevo June, 2003


















