MATH2070 - Non-linear optimisation with constraintsMATH2070 Optimisation Nonlinear optimisation with...
55
MATH2070 Optimisation Nonlinear optimisation with constraints Semester 2, 2012 Lecturer: I.W. Guo Lecture slides courtesy of J.R. Wishart
Transcript of MATH2070 - Non-linear optimisation with constraintsMATH2070 Optimisation Nonlinear optimisation with...

MATH2070 Optimisation
Nonlinear optimisation with constraints
Semester 2, 2012Lecturer: I.W. Guo
Lecture slides courtesy of J.R. Wishart

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Review
The full nonlinear optimisation problem with equality constraints
Method of Lagrange multipliers
Dealing with Inequality Constraints and the Kuhn-Tuckerconditions
Second order conditions with constraints

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
The full nonlinear optimisation problem with equality constraints
Method of Lagrange multipliers
Dealing with Inequality Constraints and the Kuhn-Tuckerconditions
Second order conditions with constraints

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Non-linear optimisation
Interested in optimising a function of several variables withconstraints.
Multivariate framework
Variables x = (x1, x2, . . . , xn) ∈ D ⊂ Rn
Objective Function Z = f (x1, x2, . . . , xn)
Constraint equations,
g1(x1, x2, . . . , xn) = 0, h1(x1, x2, . . . , xn) ≤ 0,
g2(x1, x2, . . . , xn) = 0, h2(x1, x2, . . . , xn) ≤ 0,
......
gm(x1, x2, . . . , xn) = 0, hp(x1, x2, . . . , xn) ≤ 0.

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Vector notation
Multivariate framework
Minimise Z = f (x)
such that g(x) = 0, h(x) ≤ 0,
where g :Rn−→Rm and h :Rn−→Rp.
Objectives?
I Find extrema of above problem.
I Consider equality constraints first.
I Extension: Allow inequality constraints.

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Initial Example
Minimise the heat loss through the surface area of an open lidrectangular container.
Formulated as a problem
Minimise,S = 2xy + 2yz + xz
such that,
V = xyz ≡ constant and x, y, z > 0.
I Parameters : (x, y, z)
I Objective function : f = S
I Constraints : g = xyz − V

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
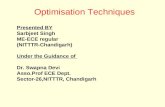
Graphical interpretation of problem
level contours of f(x, y)
g(x, y) = c
P
I Feasible points occur at the tangential intersection of g(x, y)and f(x, y).
I Gradient of f is parallel to gradient of g.I Recall from linear algebra and vectors
∇f + λ∇g = 0,
for some constant, λ.

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Lagrangian
Definition
Define the Lagrangian for our problem,
L(x, y, z, λ) = S(x, y, z) + λg(x, y, z)
= 2xy + 2yz + xz + λ (xyz − V )
I Necessary conditions,
∂L
∂x=∂L
∂y=∂L
∂z=∂L
∂λ= 0.
I This will be a system of four equations with four unknowns(x, y, z, λ) that needs to be solved

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Solving the system
I Calculate derivatives,
Lx = 2y + z − λyz, Ly = 2x+ 2z − λxz, Lz = 2y + x− λxy,Lλ = xyz − V,
I Ensure constraint,
Lλ = 0⇒ z =V
xy(1)
I Eliminate λ, solve for (x, y, z)
Lx = 0⇒ 2y + z = λyz ⇒ λ =2
z+
1
y(2)
Ly = 0⇒ 2x+ 2z = λxz ⇒ λ =2
z+
2
x(3)
Lz = 0⇒ 2y + 2x = λxy ⇒ λ =2
x+
1
y(4)

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Solving system (continued)
I From (2) and (3) it follows x = 2y
I From (2) and (4) it follows x = z
I Use (1) with x = z = 2y then simplify,
x = (x, y, z) =
(3√
2V ,3
√V
4,
3√
2V
)

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
The full nonlinear optimisation problem with equality constraints
Method of Lagrange multipliers
Dealing with Inequality Constraints and the Kuhn-Tuckerconditions
Second order conditions with constraints

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Constrained optimisation
Wish to generalised previous argument to multivariate framework,
Minimise Z = f (x), x ∈ D ⊂ Rn
such that g(x) = 0, h(x) ≤ 0,
where g :Rn−→Rm and h :Rn−→Rp.
I Geometrically, the constraints define a subset Ω of Rn, thefeasible set, which is of dimension less than n−m, in whichthe minimum lies.

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Constrained Optimisation
I A value x ∈ D is called feasible if both g(x) = 0 andh(x) ≤ 0.
I An inequality constraint hi(x) ≤ 0 isI Active if the feasible x ∈ D satisfies hi(x) = 0I Inactive otherwise.

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Equality Constraints
A point x∗ which satisfies the constraint g(x∗) = 0 is a regularpoint if
∇g1(x∗),∇g2(x∗). . . . ,∇gm(x∗)
is linearly independent.
Rank
∂g1∂x1
. . . ∂g1∂xn
......
∂gm∂x1
. . . ∂gm∂xn
= m.

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Tangent Subspace
Definition
Define the constrainted tangent subspace
T = d ∈ Rn : ∇g(x∗)d = 0 ,
where ∇g(x∗) is an m× n matrix defined,
∇g(x∗) :=
∂g1∂x1
. . . ∂g1∂xn
......
∂gm∂x1
. . . ∂gm∂xn
=
∇g1(x∗)T
...∇gm(x∗)T
and ∇gTi :=
(∂gi∂x1
, . . . , ∂gi∂xn
)

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Tangent Subspace (Example)

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Generalised Lagrangian
Definition
Define the Lagrangian for the objective function f(x) withconstraint equations g(x) = 0,
L(x,λ) := f +
m∑i=1
λigi = f + λTg .
I Introduce a lagrange multiplier for each equality constraint.

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
First order necessary conditions
Theorem
Assume x∗ is a regular point of g(x) = 0 and let x∗ be a localextremum of f subject to g(x) = 0, with f, g ∈ C1. Then thereexists λ ∈ Rm such that,
∇L(x∗,λ) = ∇f(x∗) + λT∇g(x∗) = 0.
In sigma notation:
∂L(x∗)
∂xj=∂f(x∗)
∂xj+
m∑i=1
λi∂gi(x
∗)
∂xj= 0 , j = 1, . . . , n ;
and∂L(x∗)
∂λi= gi(x
∗) = 0 , i = 1, . . . ,m .

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Another example
Example
Find the extremum for f(x, y) = 12(x− 1)2 + 1
2(y− 2)2 + 1 subjectto the single constraint x+ y = 1.
Solution: Construct the Lagrangian:
L(x, y, λ) = 12(x− 1)2 + 1
2(y − 2)2 + 1 + λ(x+ y − 1) .
Then the necessary conditions are:
∂L
∂x= x− 1 + λ = 0
∂L
∂y= y − 2 + λ = 0
∂L
∂λ= 0⇒ x+ y = 1 .

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Solve system
Can solve this by converting problem into matrix form.
i.e. solve for a in Ma = b1 0 10 1 11 1 0
xyλ
=
121
Invert matrix M and solve gives,xy
λ
=
1 0 10 1 11 1 0
−1121
=
011

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Comparison with unconstrained problem
Example
Minimize f(x, y) = 12(x− 1)2 + 1
2(y − 2)2 + 1 subject to the singleconstraint x+ y = 1.
I In unconstrained problem, minimum attained at x = (1, 2).
Minimum at f∗ = f(1, 2) = 1
I Constraint modifies solution.
Constrained minimum at f∗ = f(0, 1) = 2.
I Note: Constrained minimum is bounded from below by theunconstrained minumum.

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Use of convex functions : Example
Example
Minimise: f(x, y) = x2 + y2 + xy− 5y such that: x+ 2y = 5 .
The constraint is linear (therefore convex) and Hessian matrix of fis positive definite so f is convex as well.
The Lagrangian is
L(x, y, λ) = x2 + y2 + xy − 5y + λ(x+ 2y − 5) .

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Solve
Finding first order necessary conditions,
∂L
∂x= 2x+ y + λ = 0 (5)
∂L
∂y= 2y + x− 5 + 2λ = 0 (6)
∂L
∂λ= x+ 2y − 5 = 0 . (7)
In matrix form the system is,2 1 11 2 21 2 0
xyλ
=
055
Inverting and solving yields,xy
λ
=1
3
−5100

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
The full nonlinear optimisation problem with equality constraints
Method of Lagrange multipliers
Dealing with Inequality Constraints and the Kuhn-Tuckerconditions
Second order conditions with constraints

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Inequality constraints
We now consider constrained optimisation problems with pinequality constraints,
Minimise: f(x1, x2, . . . , xn)
subject to: h1(x1, x2, . . . , xn) ≤ 0
h2(x1, x2, . . . , xn) ≤ 0
...
hp(x1, x2, . . . , xn) ≤ 0 .
In vector form the problem is
Minimise: f(x)
subject to: h(x) ≤ 0.

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
The Kuhn-Tucker Conditions
I To deal with the inequality constraints, introduce the so calledKuhn-Tucker conditions.
∂f
∂xj+
p∑i=1
λi∂hi∂xj
= 0 , j = 1, . . . , n ;
λihi = 0 , i = 1, . . . ,m ;
λi ≥ 0 , i = 1, . . . ,m .
I Extra conditions for λ apply in this sense,
hi(x) = 0 , if λi > 0, i = 1, . . . , p
or
hi(x) < 0 , if λi = 0, i = 1, . . . , p.

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
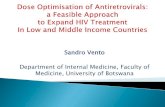
Graphical Interpretation
h(x, y) < 0 (λ = 0)
level contours of f(x, y)
h(x, y) = 0
(λ > 0)
P
h(x, y) > 0
I If λ > 0 then find solution on line h(x, y) = 0
I If λ = 0 then find solution in region h(x, y) < 0

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Graphical Interpretation
level contours of f(x, y)
h(x, y) = 0
(λ > 0)
(x∗, y∗)
I Consider h(x, y) = 0, then λ > 0. Optimum at x∗ = (x∗, y∗)

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Graphical Interpretation
(x∗, y∗)
h(x, y) < 0 (λ = 0)
level contours of f(x, y)
h(x, y) = 0
I Consider h(x, y) < 0, then λ = 0. Optimum at x∗ = (x∗, y∗)

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Kuhn Tucker
I Kuhn-Tucker conditions are always necessary.
I Kuhn-Tucker conditions are sufficient if the objective functionand the constraint functions are convex.
I Need a procedure to deal with these conditions.

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Introduce slack variables
Slack Variables
To deal with the inequality constraint introduce a variable, s2i foreach constraint.
New constrained optimisation problem with m equality constraints,
Minimise: f(x1, x2, . . . , xn)
subject to: h1(x1, x2, . . . , xn) + s21 = 0
h2(x1, x2, . . . , xn) + s22 = 0
...
hp(x1, x2, . . . , xn) + s2p = 0 .

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
New Lagrangian
The Lagrangian for constrained problem is,
L(x,λ, s) = f(x) +
p∑i=1
λi(hi(x) + s2i
)= f(x) + λTh(x) + λTs,
where s is a vector in Rp with i-th component s2i .
I L depends on the n+ 2m independent variablesx1, x2, . . . , xn, λ1, λ2, . . . , λp and s1, s2, . . . , sp.
I To find the constrained minimum we must differentiate Lwith respect to each of these variables and set the result tozero in each case.

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Solving the system
Need to solve n+ 2m variables given by the n+ 2m equationsgenerated by,
∂L
∂x1=
∂L
∂x2= · · · = ∂L
∂xn= 0
∂L
∂λ1=
∂L
∂λ2= · · · = ∂L
∂λp=∂L
∂s1=∂L
∂s2= · · · = ∂L
∂sp= 0.
I Having λi ≥ 0 ensures that
L = f(x) +
p∑i=1
λi(hi(x) + s2i
)has a well defined minimum.
I If λi < 0, we can always make L smaller due to the λis2i term.

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
New first order equations
I The differentiation, ∂L/∂λi = 0, ensures the constraints hold.
Lλi = 0⇒ hi + s2i = 0 , i = 1, . . . , p .
I The differentiation, ∂L∂si
= 0, controls observed region ofminimising,
Lsi = 0⇒ 2λisi = 0 , i = 1, . . . , p .
I If λi > 0 we are on the boundary since si = 0
I If λi = 0 we are inside the feasible region since si 6= 0.
I If λi < 0 we are on the boundary again, but the point is not alocal minimum. So only focus on λi ≥ 0.

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Simple application
Example
Consider the general problem
Minimise: f(x)
subject to: a ≤ x ≤ b .
I Re-express the problem to allow the Kuhn-Tucker conditions.
Minimise: f(x)
subject to: − x ≤ −ax ≤ b .
I The Lagrangian L is given by
L = f + λ1(−x+ s21 + a) + λ2(x+ s22 − b) .

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Solving system
I Find first order equations
∂L
∂x= f ′(x)− λ1 + λ2 = 0,
∂L
∂λ1= −x+ a+ s21 = 0
∂L
∂λ2= x− b+ s22 = 0,
∂L
∂s1= 2λ1s1 = 0
∂L
∂s2= 2λ2s2 = 0 .
I Consider the scenarios for when the constraints are at theboundary or inside the feasible region.

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Possible scenarios
x
y
f ′(x) > 0
a bDOWNx
y
a b
f ′(x) = 0
INx
y
f ′(x) < 0
a bUP
I Down variable scenario (lower boundary).
s1 = 0⇒ λ1 > 0 and s22 > 0⇒ λ2 = 0.
Implies that x = a, and f ′(x) = f ′(a) = λ1 > 0, so that theminimum lies at x = a.

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Possible scenarios
x
y
f ′(x) > 0
a bDOWNx
y
a b
f ′(x) = 0
INx
y
f ′(x) < 0
a bUP
I In variable scenario (Inside feasible region).
s21 > 0⇒ λ1 = 0 and s22 > 0⇒ λ2 = 0.
Implies f ′(x) = 0, for some x ∈ [a, b] determined by thespecific f(x), and thus there is a turning point somewhere inthe interval [a, b]

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Possible scenarios
x
y
f ′(x) > 0
a bDOWNx
y
a b
f ′(x) = 0
INx
y
f ′(x) < 0
a bUP
I Up variable scenario (upper boundary).
s21 > 0⇒ λ1 = 0 and s2 = 0⇒ λ2 > 0.
Implies x = b, so that f ′(x) = f ′(b) = −λ2 < 0 and we havethe minimum at x = b.

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Numerical example
Example
Minimise: f(x1, x2, x3) = x1(x1 − 10) + x2(x2 − 50)− 2x3
subject to: x1 + x2 ≤ 10
x3 ≤ 10 .
Write down Lagrangian,
L(x,λ, s) = f(x) + λT (h(x) + s) ,
where,
h(x) =
(x1 + x2 − 10x3 − 10
)s =
(s21
s22
)

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Solve the system of first order equations
∂L
∂x1= 2x1 − 10 + λ1 = 0 (8)
∂L
∂x2= 2x2 − 50 + λ1 = 0 (9)
∂L
∂x3= −2 + λ2 = 0 (10)
The Kuhn-Tucker conditions are λ1, λ2 ≥ 0 and
λ1(x1 + x2 − 10) = 0 (11)
λ2(x3 − 10) = 0 (12)
Immediately from (10) and (12), λ2 = 2 and x3 = 10.

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Two remaining cases to consider
I Inside the feasible set λ1 = 0.
From equations (8) and (9) find,
x = (x1, x2, x3) = (5, 25, 10)
However, constraint x1 + x2 ≤ 10, is violated
Reject this solution!
I At the boundary, λ1 > 0
Using constraint equation (11) x1 +x2 = 10. Find the system:
−2x1 − 30 + λ1 = 0
2x1 − 10 + λ1 = 0 ,
Solving gives, λ1 = 20 and x1 = −5, x2 = 15.

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
The full nonlinear optimisation problem with equality constraints
Method of Lagrange multipliers
Dealing with Inequality Constraints and the Kuhn-Tuckerconditions
Second order conditions with constraints

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Motivation
I Determine sufficient conditions for minima (maxima) given aset of constraints.
I Define the operator ∇2 to denote the Hessian matrices,
∇2f := Hf .
I What are the necessary/sufficient conditions on ∇2f and∇2gj
mj=1
that ensure a constrained minimum?
I Consider equality constraints first.
I Extend to inequality constraints.

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Notation
Hessian of the constraint equations in the upcoming results needscare . Define as follows,
I Constraint Hessian involving Lagrange multipliers,
λT∇2g(x) :=
m∑i=1
λi∇2gi(x) =
m∑i=1
λiHgi(x)

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Necessary second order condition for a constrainedminimum with equality constraints
Theorem
Suppose that x∗ is a regular point of g ∈ C2 and is a localminimum of f such that g(x) = 0 and x∗ is a regular point of g.Then there exists a λ ∈ Rm such that,
∇f(x∗) + λT∇g(x∗) = 0.
Also, from the tangent plane T = y : ∇g(x∗)y = 0, theLagragian Hessian at x∗,
∇2L(x∗) := ∇2f(x∗) + λT∇2g(x∗),
is positive semi-definite on T . i.e. yT∇2L(x∗)y ≥ 0 for all y ∈ T .

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Sufficient second order condition for a constrainedminimum with equality constraints
Theorem
Suppose that x∗ and λ satisfy,
∇f(x∗) + λT∇g(x∗) = 0.
Suppose further that the Lagragian Hessian at x∗,
∇2L(x∗) := ∇2f(x∗) + λT∇2g(x∗).
If yT∇2L(x∗)y > 0 for all y ∈ T . Then f(x∗) is a local minimumthat satisfies g(x∗) = 0.

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Determine if positive/negative definite
Options for determining definiteness of ∇2L(x∗) on the subspaceT .
I Complete the square of yT∇2L(x∗)y.
I Compute the eigenvalues of yT∇2L(x∗)y.
Example
Max: Z = x1x2 + x1x3 + x2x3
subject to: x1 + x2 + x3 = 3.

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Extension: Inequality constraints
Problem:
Min f(x)
subject to: h(x) ≤ 0
g(x) = 0.
where f, g,h ∈ C1.
I Extend arguments to include both equality and inequalityconstraints.
I Notation: Define the index set J :
Definition
Let J (x∗) be the index set of active constraints.
hj(x∗) = 0, j ∈ J ; hj(x
∗) < 0, j /∈ J .

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
First order necessary conditions
The point x∗ is called a regular point of the constraints,g(x) = 0 and h(x) ≤ 0, if
∇gimi=1 and ∇hjj∈J
are linearly independent.
Theorem
Let x∗ be a local minimum of f(x) subject the constraintsg(x) = 0 and h(x) ≤ 0. Suppose further that x∗ is a regularpoint of the constraints. Then there exists λ ∈ Rm and µ ∈ Rpwith µ ≥ 0 such that,
∇f(x∗) + λT∇g(x∗) + µT∇h(x∗) = 0
µTh(x∗) = 0.(13)

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Second order necessary conditions
Theorem
Let x∗ be a regular point of g(x) = 0, h(x) ≤ 0 withf, g,h ∈ C2. If x∗ is a local minimum point of the fullyconstrained problem then there exists λ ∈ Rm and µ ∈ Rp suchthat (13) holds and
∇2f(x∗) +
m∑i=1
λi∇2gi(x∗) +
p∑j=1
µj∇2hj(x∗)
is positive semi-definite on the tangent space of the activeconstraints. i.e. on the space,
T =d ∈ Rn
∣∣∣∇g(x∗)d = 0; ∇hj(x∗)d = 0, j ∈ J

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Second order sufficient conditions
Theorem
Let x∗ satisfy g(x) = 0, h(x) ≤ 0. Suppose there exists λ ∈ Rmand µ ∈ Rp such that µ ≥ 0 and (13) holds and
∇2f(x∗) +
m∑i=1
λi∇2gi(x∗) +
p∑j=1
µj∇2hj(x∗)
is positive definite on the tangent space of the active constraints.i.e. on the space,
T ′ =d ∈ Rn
∣∣∣∇g(x∗)d = 0; ∇hj(x∗)d = 0, j ∈ J,
where J =j∣∣∣hj(x∗) = 0, µj > 0
. Then x∗ is a strict local
minimum of f subject to the full constraints.

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Ways to compute the sufficient conditions
The nature of the Hessian of the Lagrangian function and with itsauxiliary conditions can be determined.
1. Eigenvalues on the subspace T .
2. Find the nature of the Bordered Hessian.

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Eigenvalues on subspaces
Let eimi=1 be an orthonormal basis of T . Then d ∈ T can bewritten,
d = Ez,
where z ∈ Rm and,
E = [e1 e2 . . . em] .
Then use,
dT∇2Ld = . . . ,

Introduction Lagrange Inequality Constraints and Kuhn-Tucker Second order conditions
Bordered Hessian
Alternative method to determining the behaviour of the LagragianHessian.
Definition
Given an objective function f with constraints g :Rn−→Rm,define the Bordered Hessian matrix,
B(x,λ) :=
(∇2L(x,λ) ∇g(x)T
∇g(x) 0
)
Find the nature of the Bordered Hessian.