
Master 1 Informatique UE M1if37 - Animation en … · Corps rigide de masse m soumis a la force de...
49
Simulation d’objets d´ eformables Syst` eme masse-ressorts Master 1 Informatique UE M1if37 - Animation en synth` ese d’image Partie - Simulation par mod` eles physiques Cours 3 - Simulation d’objets d´ eformables Florence Zara LIRIS - Universit´ e Lyon 1 http://liris.cnrs.fr/florence.zara E-mail: fl[email protected] Florence Zara UE M1if37 - Animation en synth` ese d’image
Transcript of Master 1 Informatique UE M1if37 - Animation en … · Corps rigide de masse m soumis a la force de...

Simulation d’objets deformablesSysteme masse-ressorts
Master 1 InformatiqueUE M1if37 - Animation en synthese d’image
Partie - Simulation par modeles physiquesCours 3 - Simulation d’objets deformables
Florence Zara
LIRIS - Universite Lyon 1
http://liris.cnrs.fr/florence.zara
E-mail: [email protected]
Florence Zara UE M1if37 - Animation en synthese d’image

Simulation d’objets deformablesSysteme masse-ressorts
Plan du cours
Simulation d’objets deformables
Exemples d’objet deformables
Caracteristiques des objets deformables
Mecanique des Milieux Continus (MMC)
Systemes masses-ressorts
Definition
Application a une simulation de textiles
Travail demande en TP
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
ExemplesCaracteristiquesMMC
Simulation d’objets deformables : exemples (1)
Simulation de cheveux
[Bertails, et. al. 2006]
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
ExemplesCaracteristiquesMMC
Simulation d’objets deformables : exemples (2)
Simulation de textiles
[Bridson, et. al. 2002] [Zara, et. al. 2003] [MIRALab]
Florence Zara UE M1if37 - Animation en synthese d’image

Simulation d’objets deformablesSysteme masse-ressorts
ExemplesCaracteristiquesMMC
Simulation d’objets deformables : exemples (3)
Simulation d’objets deformables divers et varies
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
ExemplesCaracteristiquesMMC
Comment caracteriser les objets deformables ?
Deux notions importantes : contrainte et deformation
Le rapport contraintedeformation caracterise l’objet deformable
Plusieurs types de contraintes / deformations⇒ plusieurs coefficients caracterisant les objets deformables⇒ effectue des tests sur les materiaux pour mesurer cescoefficients
Florence Zara UE M1if37 - Animation en synthese d’image

Simulation d’objets deformablesSysteme masse-ressorts
ExemplesCaracteristiquesMMC
Comment caracteriser les objets deformables ?
Tests de deformations mettent en avant parametres d’elasticite :
Etirement ⇒ module de Young, coefficient de Poisson
Cisaillement ⇒ module de cisaillement (shear)
Compression ⇒ module de compressibilite (Bulk)
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
ExemplesCaracteristiquesMMC
1 - Test de traction / etirement
Contrainte de traction
Intensite de la force appliquee divisee par l’aire de la surfacesur laquelle la force est exercee : σ = F/A
Tension importante quand :
Intensite de la force importanteSurface petite
Exemple
Corps rigide de masse m soumis a la force de gravite ~F = m~g
Corps pose sur un cylindre de rayon r
Tension sur le cylindre : σ = F/A = mgπr2
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
ExemplesCaracteristiquesMMC
Test de traction / etirement - Module de Young
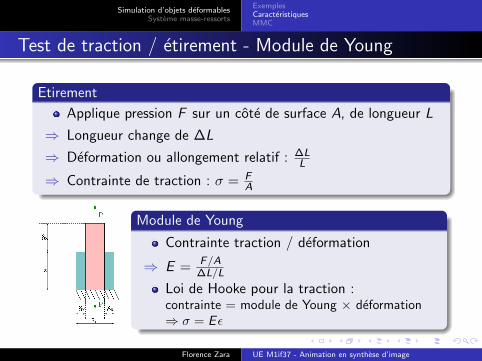
Etirement
Applique pression F sur un cote de surface A, de longueur L
⇒ Longueur change de ∆L
⇒ Deformation ou allongement relatif : ∆LL
⇒ Contrainte de traction : σ = FA
Module de Young
Contrainte traction / deformation
⇒ E = F/A∆L/L
Loi de Hooke pour la traction :contrainte = module de Young × deformation⇒ σ = Eε
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
ExemplesCaracteristiquesMMC
Test de traction / etirement - Coefficient de Poisson
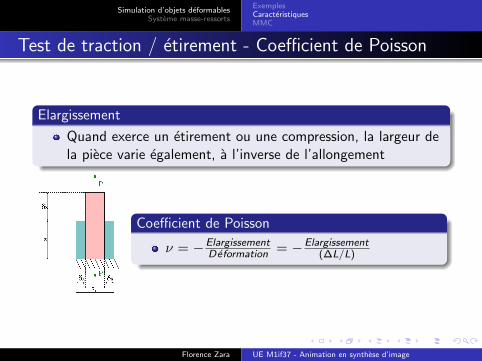
Elargissement
Quand exerce un etirement ou une compression, la largeur dela piece varie egalement, a l’inverse de l’allongement
Coefficient de Poisson
ν = −ElargissementDeformation = −Elargissement
(∆L/L)
Florence Zara UE M1if37 - Animation en synthese d’image

Simulation d’objets deformablesSysteme masse-ressorts
ExemplesCaracteristiquesMMC
2 - Test de cisaillement - Module de Coulomb
Cisaillement
Cisaillement : variation de l’angle, qui n’est plus droit
Cela correspond a des forces s’exercant parallelement a la face
Contrainte = scission = F / A
Deformation = ecart a l’angle droit = cisaillement
Module de cisaillement ou de Coulomb
G = contraintedeformation = F/A
θ
Si milieu isotrope (meme comportementdans toutes les directions), G = E
2(1+ν)
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
ExemplesCaracteristiquesMMC
3 - Test de compression - Bulk modulus
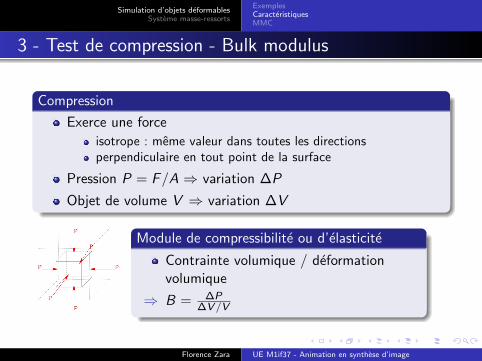
Compression
Exerce une force
isotrope : meme valeur dans toutes les directionsperpendiculaire en tout point de la surface
Pression P = F/A ⇒ variation ∆P
Objet de volume V ⇒ variation ∆V
Module de compressibilite ou d’elasticite
Contrainte volumique / deformationvolumique
⇒ B = ∆P∆V /V
Florence Zara UE M1if37 - Animation en synthese d’image

Simulation d’objets deformablesSysteme masse-ressorts
ExemplesCaracteristiquesMMC
Comment simuler comportement objet deformable ?
Coefficient de Poisson, modules de Young, de compressibilite,et de cisaillement ⇒ Mecanique des Milieux Continus (MMC)
MMC donne une description du comportement d’un objet quise deforme ou se deplace sous l’influence de contraintes
Discretisation de l’objet en elements
Maille du maillage = noeuds + fonctions d’interpolationFormulation deplacement de tout point a l’interieur d’unelement en fonction des valeurs aux noeuds
Resolution equations MMC pour obtenir deplacement U(X)
Methodes de resolution :
Methode des Elements Finis
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
ExemplesCaracteristiquesMMC
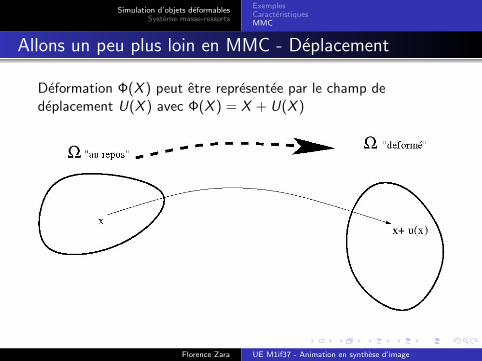
Allons un peu plus loin en MMC - Deplacement
Deformation Φ(X ) peut etre representee par le champ dedeplacement U(X ) avec Φ(X ) = X + U(X )
Florence Zara UE M1if37 - Animation en synthese d’image

Simulation d’objets deformablesSysteme masse-ressorts
ExemplesCaracteristiquesMMC
Allons un peu plus loin en MMC - Contrainte
Tenseur de contrainte :
Tenseur (matrice 3× 3) qui caracterise l’etat de contrainte
Tenseur symetrique avec :
σ(X ) =
[σ11 σ12 σ13
σ21 σ22 σ23
σ31 σ32 σ33
]=
σ11
σ22
σ33
σ12
σ13
σ23
Elements diagonaux : contraintes normalesElements non diagonaux : contraintes de cisaillement
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
ExemplesCaracteristiquesMMC
Allons un peu plus loin en MMC - Deformation
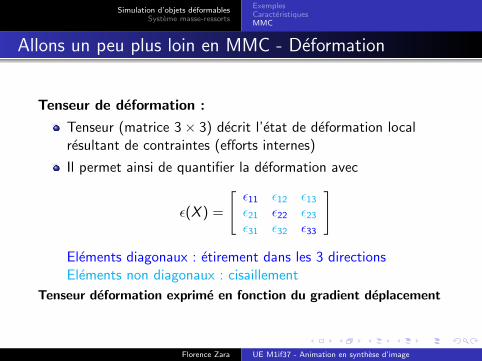
Tenseur de deformation :
Tenseur (matrice 3× 3) decrit l’etat de deformation localresultant de contraintes (efforts internes)
Il permet ainsi de quantifier la deformation avec
ε(X ) =
[ε11 ε12 ε13
ε21 ε22 ε23
ε31 ε32 ε33
]
Elements diagonaux : etirement dans les 3 directionsElements non diagonaux : cisaillement
Tenseur deformation exprime en fonction du gradient deplacement
Florence Zara UE M1if37 - Animation en synthese d’image

Simulation d’objets deformablesSysteme masse-ressorts
ExemplesCaracteristiquesMMC
Allons un peu plus loin en MMC - Deformation
Exemple du tenseur de deformation de Green-Saint Venant :
ε(X ) =1
2
(∇UT (X ) +∇U(X ) +∇UT (X ) ∇U(X )
)avec
∇U(X ) =
∂Ux (X )
∂x∂Ux (X )
∂y∂Ux (X )
∂z∂Uy (X )
∂x∂Uy (X )
∂y∂Uy (X )
∂z∂Uz (X )
∂x∂Uz (X )
∂y∂Uz (X )
∂z
.Partie lineaire - Cas elasticite lineaire avec loi de HookePartie non-lineaire - Cas elasticite non-lineaire
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
ExemplesCaracteristiquesMMC
Allons un peu plus loin en MMC - Comportement
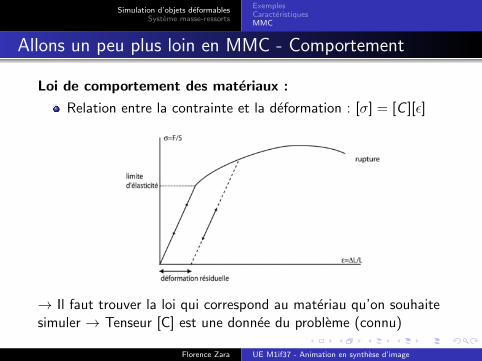
Loi de comportement des materiaux :
Relation entre la contrainte et la deformation : [σ] = [C ][ε]
→ Il faut trouver la loi qui correspond au materiau qu’on souhaitesimuler → Tenseur [C] est une donnee du probleme (connu)
Florence Zara UE M1if37 - Animation en synthese d’image

Simulation d’objets deformablesSysteme masse-ressorts
ExemplesCaracteristiquesMMC
Allons un peu plus loin en MMC - Elasticite lineaire
Cas de l’elasticite lineaire :
Partie lineaire de la courbe precedente
Concerne les petites deformations (< 10% taille objet)
Deformation elastique est reversible : objet retourne a son etatinitial quand la contrainte est supprimee
Utilisation de la partie lineaire du tenseur de deformation deGreen-Saint Venant :
ε(X ) =1
2
(∇UT (X ) +∇U(X )
)
Florence Zara UE M1if37 - Animation en synthese d’image

Simulation d’objets deformablesSysteme masse-ressorts
ExemplesCaracteristiquesMMC
Allons un peu plus loin en MMC - Elasticite lineaire
Loi de comportement pour l’elasticite lineaire (materiau isotrope) =Loi de Hooke
σ11σ22σ33σ12σ13σ23
=
λ + 2µ λ λ 0 0 0λ λ + 2µ λ 0 0 0λ λ λ + 2µ 0 0 00 0 0 µ 0 00 0 0 0 µ 00 0 0 0 0 µ
ε11ε22ε33ε12ε13ε23
avec λ et µ coefficients de Lame (dependant du materiau) : λ = ν E
(1+ν)(1−2ν), µ = E
2(1+ν)
σ11σ22σ33σ12σ13σ23
=E
(1 + ν)(1 − 2ν)
1 − ν ν ν 0 0 0ν 1 − ν ν 0 0 0ν ν 1 − ν 0 0 00 0 0 1 − 2ν 0 00 0 0 0 1 − 2ν 00 0 0 0 0 1 − 2ν
ε11ε22ε33ε12ε13ε23
Florence Zara UE M1if37 - Animation en synthese d’image

Simulation d’objets deformablesSysteme masse-ressorts
ExemplesCaracteristiquesMMC
Allons un peu plus loin en MMC - Elasticite non-lineaire
Cas de l’elasticite non-lineaire :
Permet de simuler des deformations plus grandes
Plusieurs lois de comportement possibles pour le casnon-lineaire (materiaux hyper-elastiques)
Par ex. utilisation du tenseur de deformation de Green-SaintVenant :{
ε(X ) = 12
(∇UT (X ) +∇U(X ) +∇UT (X ) ∇U(X )
)W (X ) = λ
2 (tr ε(X ))2 + µ tr ε(X )2
Mais existe d’autres lois : Mooney-Rivlin, Neo-Hooke, etc.
→ Experimentations pour savoir quelle loi correspond au materiau
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
ExemplesCaracteristiquesMMC
Allons un peu plus loin en MMC - Lineaire vs. non-lineaire
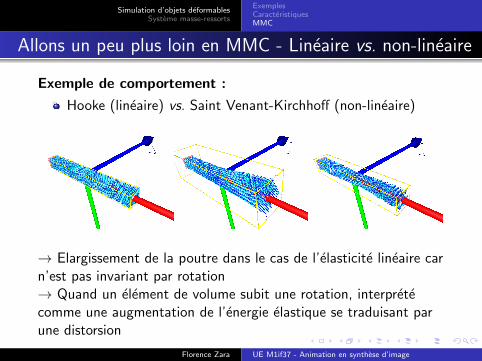
Exemple de comportement :
Hooke (lineaire) vs. Saint Venant-Kirchhoff (non-lineaire)
→ Elargissement de la poutre dans le cas de l’elasticite lineaire carn’est pas invariant par rotation→ Quand un element de volume subit une rotation, interpretecomme une augmentation de l’energie elastique se traduisant parune distorsion
Florence Zara UE M1if37 - Animation en synthese d’image

Simulation d’objets deformablesSysteme masse-ressorts
ExemplesCaracteristiquesMMC
Allons un peu plus loin en MMC - Simulation
Et donc ?Comment simuler comportement objet deformable ?
Equation du mouvement de l’objet deformable :
M U(t) + DU(t) + K (U(t))U(t) = F (t),
avec M,D,K matrices des masses, viscosite et raideurs, F laforce causant la deformation
Equations d’equilibre (ρ = masse volumique) :
ρ U = ∇ · σ + F
Rappel : ∇ · A = div A = ∂Ax
∂x +∂Ay
∂y + ∂Az
∂z
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
ExemplesCaracteristiquesMMC
Allons un peu plus loin en MMC - MEF
Resolution par la methode des elements finis (MEF) pourobtenir deplacement U
Discretisation du domaine en elementsDefinition de fonctions de formesLoi de comportement : lien entre contrainte et deformationTenseur de deformation : lien entre deformation et deplacement→ Deduit le lien entre la contrainte et le deplacementEquation bilan du systeme : Force = ...→ Bilan des efforts, des contraintes (exprime en fonction dudeplacement)→ Sort le U de la formulationEquation du mouvement : Force = ...→ Sort le U de la formulation
→ Assemblage de la matrice K→ Resolution pour obtenir U
Florence Zara UE M1if37 - Animation en synthese d’image

Simulation d’objets deformablesSysteme masse-ressorts
ExemplesCaracteristiquesMMC
Comment simuler comportement objet deformable ?
Alternatives possibles pour modeliser objets deformables1 Basee sur des principes physiques, necessitant resolution
systemes d’equations differentielles⇒ objet discretise en un ensemble de masses connectees pardes ressorts (systeme masses-ressorts)
2 Non basees sur des principes physiques mais solutions semblentphysiquement correctes⇒ objet borne par une surface parametrique avec des pointsde controle (B-spline, NURBS)
3 Deformation de la region contenant l’objet deformableSurface de l’objet representee par un maillage triangulaire oupar une surface parametrique avec points de controle⇒ deformation de la region engendre la deformation de l’objet
Florence Zara UE M1if37 - Animation en synthese d’image

Simulation d’objets deformablesSysteme masse-ressorts
ExemplesCaracteristiquesMMC
Comment simuler comportement objet deformable ?
4 Objet modelise par une region bornee par une surface definieimplicitement par F (x , y , z) = 0Interieur de l’objet = ens. des points tels que F (x , y , z) < 0Force exercee sur l’objet simulee par l’ajout d’une fonction dedeformation D(x , y , z) a F (x , y , z)⇒ surface deformee definie implicitement parF (x , y , z) + D(x , y , z) = 0⇒ interieur de l’objet deforme defini parF (x , y , z) + D(x , y , z) < 0
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
DefinitionSimulation de textilesTP
Comment simuler comportement objet deformable ?
Etude des systemes masses-ressorts
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
DefinitionSimulation de textilesTP
Systeme masses-ressorts
Definition
Objet deformable modelise par un ensemble de massesconnectees par des ressorts
Les objets ainsi modelises peuvent etre :
des courbes (cheveux, cordes, etc.) ⇒ 1 dimensiondes surfaces (textiles, surface de l’eau, etc.) ⇒ 2 dimensionsdes volumes (objets volumiques visqueux) ⇒ 3 dimensions
Complexite du systeme depend
du nombre de masses
de leurs connections
Florence Zara UE M1if37 - Animation en synthese d’image

Simulation d’objets deformablesSysteme masse-ressorts
DefinitionSimulation de textilesTP
Systeme masses-ressorts - 1D
Cas 1D : ligne polygonale
Soit une courbe ouverte avec deux points terminaux
Soit une courbe fermee (tous les points sont relies)
Chaque sommet represente une masse
Chaque arete represente un ressort reliant les deux masses setrouvant aux deux extremites de l’arete
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
DefinitionSimulation de textilesTP
Systeme masses-ressorts - 1D
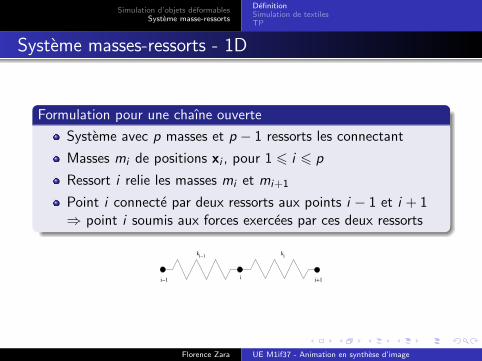
Formulation pour une chaıne ouverte
Systeme avec p masses et p − 1 ressorts les connectant
Masses mi de positions xi , pour 1 6 i 6 p
Ressort i relie les masses mi et mi+1
Point i connecte par deux ressorts aux points i − 1 et i + 1⇒ point i soumis aux forces exercees par ces deux ressorts
i!1
i+1i!1 i
kk i
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
DefinitionSimulation de textilesTP
Systeme masses-ressorts - Animation 1D
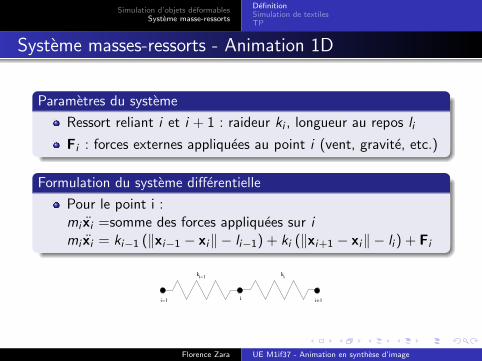
Parametres du systeme
Ressort reliant i et i + 1 : raideur ki , longueur au repos li
Fi : forces externes appliquees au point i (vent, gravite, etc.)
Formulation du systeme differentielle
Pour le point i :mi xi =somme des forces appliquees sur imi xi = ki−1 (‖xi−1 − xi‖ − li−1) + ki (‖xi+1 − xi‖ − li ) + Fi
i!1
i+1i!1 i
kk i
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
DefinitionSimulation de textilesTP
Systeme masses-ressorts - Animation 2D
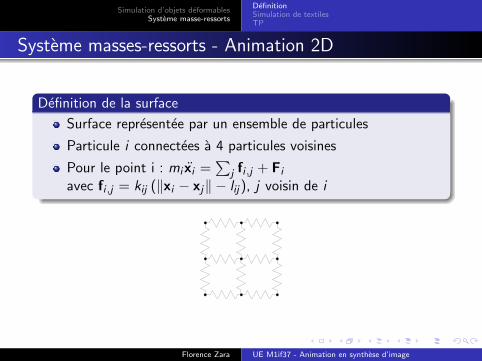
Definition de la surface
Surface representee par un ensemble de particules
Particule i connectees a 4 particules voisines
Pour le point i : mi xi =∑
j fi ,j + Fi
avec fi ,j = kij (‖xi − xj‖ − lij), j voisin de i
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
DefinitionSimulation de textilesTP
Systeme masses-ressorts - Animation 3D
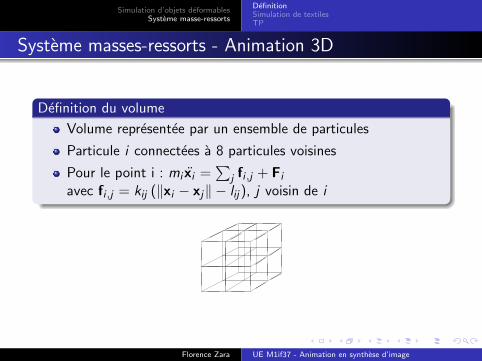
Definition du volume
Volume representee par un ensemble de particules
Particule i connectees a 8 particules voisines
Pour le point i : mi xi =∑
j fi ,j + Fi
avec fi ,j = kij (‖xi − xj‖ − lij), j voisin de i
Florence Zara UE M1if37 - Animation en synthese d’image

Simulation d’objets deformablesSysteme masse-ressorts
DefinitionSimulation de textilesTP
Systeme masses-ressorts - Generalisation
Formulation d’un systeme masses-ressorts
Systeme contenant p particules de masses mi , de position xi
Chaque ressort relie masses mi et mj , de raideur kij > 0, delongueur au repos lij
Soit Ai = ensemble des indices j tels que mi connectee a mj
Equation du mouvement de la particule i :mi xi =
∑j∈Ai
kij (‖xi − xj‖ − lij) + Fi
Florence Zara UE M1if37 - Animation en synthese d’image

Simulation d’objets deformablesSysteme masse-ressorts
DefinitionSimulation de textilesTP
Application a une simulation de textiles
Discretisation du textile en un maillage polygonal
Sommets correspondent aux particules
Topologie definit les interactions
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Tissu réel Maillage
Force
Particule
[Breen,House,Getto 1994]
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
DefinitionSimulation de textilesTP
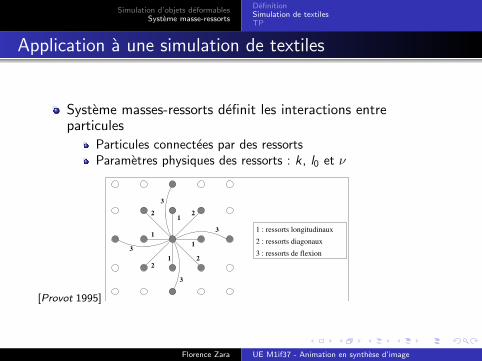
Application a une simulation de textiles
Systeme masses-ressorts definit les interactions entreparticules
Particules connectees par des ressortsParametres physiques des ressorts : k , l0 et ν
[Provot 1995]
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
3
2
3
1 2
1
3
21
2
1
3
1 : ressorts longitudinaux
2 : ressorts diagonaux
3 : ressorts de flexion
Florence Zara UE M1if37 - Animation en synthese d’image

Simulation d’objets deformablesSysteme masse-ressorts
DefinitionSimulation de textilesTP
Rappel dynamique Newtonienne
Boucle d’animation
Calcul des forces appliquees sur les particules : forces exerceespar les ressorts
Calcul des accelerations : principe fondamental de ladynamique
Integration pour obtenir les nouvelles vitesses et positions
Florence Zara UE M1if37 - Animation en synthese d’image

Simulation d’objets deformablesSysteme masse-ressorts
DefinitionSimulation de textilesTP
Calcul des forces
Calcul des forces exercees sur chaque particule
~fi (t) =∑
j|j voisin de i
[~f ei,j(t) + ~f vi,j(t)
]+ gravite + interactions
��������� �
�� �������������������
��
������� �"!$#%������&�'�()��#%*��+'"����(-,/.102�3#4,%#45�'6����0$&7�
~f ei,j(t) = kij (‖xi (t)− xj(t)‖ − lij)xi (t)−xj (t)‖xi (t)−xj (t)‖ elasticite
~f vi,j(t) =(νij (xi (t)− xj(t)) · xi (t)−xj (t)
‖xi (t)−xj (t)‖
)xi (t)−xj (t)‖xi (t)−xj (t)‖ viscosite
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
DefinitionSimulation de textilesTP
Calcul des accelerations
Loi fondamentale de la dynamique appliquee a chaqueparticule i :
xi (t) = mi−1fi (x(t), x(t))
xi (t) : acceleration de la particule i au temps tmi : masse de la particule ifi : forces exercees sur la particule ix(t) : vecteur des positions des particules au temps tx(t) : vecteur des vitesses des particules au temps t
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
DefinitionSimulation de textilesTP
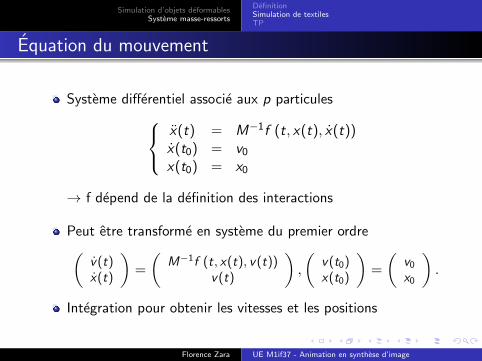
Equation du mouvement
Systeme differentiel associe aux p particulesx(t) = M−1f (t, x(t), x(t))x(t0) = v0
x(t0) = x0
→ f depend de la definition des interactions
Peut etre transforme en systeme du premier ordre(v(t)x(t)
)=
(M−1f (t, x(t), v(t))
v(t)
),
(v(t0)x(t0)
)=
(v0
x0
).
Integration pour obtenir les vitesses et les positions
Florence Zara UE M1if37 - Animation en synthese d’image

Simulation d’objets deformablesSysteme masse-ressorts
DefinitionSimulation de textilesTP
Integration : methode d’Euler implicite
Idee
Derivee y ′(t + h) remplacee par son approximation mathematique
y(t + h)− y(t)
h≈ y ′(t + h) = f (t + h, y(t + h))
Formulation du schema pour un avancement h dans le temps
y(t + h) = y(t) + h f (t + h, y(t + h))
→ Schema implicite car y(t + h) apparait des deux cotes del’equation
Florence Zara UE M1if37 - Animation en synthese d’image

Simulation d’objets deformablesSysteme masse-ressorts
DefinitionSimulation de textilesTP
Methode d’Euler implicite - Point de vue animation 3D
Donnees
Forces au temps t : f (t, x(t), v(t))Vitesse au temps t : v(t)Position au temps t : x(t)
Schema d’integration numerique
Acceleration au temps t : v(t) = M−1f (t, x(t), v(t))Vitesse au temps t + h : v(t + h) = v(t) + h v(t + h)Position au temps t + h : x(t + h) = x(t) + h v(t + h)
Florence Zara UE M1if37 - Animation en synthese d’image

Simulation d’objets deformablesSysteme masse-ressorts
DefinitionSimulation de textilesTP
Methode d’Euler implicite - Point de vue animation 3D
Soient
{∆v = v(t + h)− v(t)∆x = x(t + h)− x(t)
⇒{
∆v = h v(t + h) = h M−1f (t, x(t + h), v(t + h))∆x = h v(t + h) = h (v(t) + ∆v)
On obtient :
(∆v∆x
)= h
(M−1f (x(t) + ∆x , v(t) + ∆v)
v(t) + ∆v
)↪→ Systeme a resoudre pour obtenir les valeurs de ∆v et ∆x
Florence Zara UE M1if37 - Animation en synthese d’image

Simulation d’objets deformablesSysteme masse-ressorts
DefinitionSimulation de textilesTP
Methode d’Euler implicite - Point de vue animation 3D
Utilisation des series de Taylor appliquee a f pour obtenirapproximation du premier degre :
f (x(t) + ∆x , v(t) + ∆v) = f (t) +∂f
∂x∆x +
∂f
∂v∆v
Le systeme devient :(∆v∆x
)= h
(M−1
(f (t) + ∂f
∂x ∆x + ∂f∂v ∆v
)v(t) + ∆v
)↪→ matrices jacobiennes ∂f
∂x et ∂f∂v a calculer
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
DefinitionSimulation de textilesTP
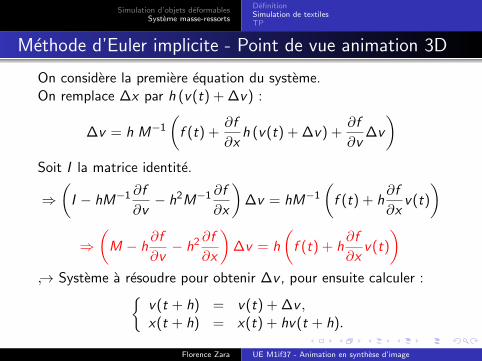
Methode d’Euler implicite - Point de vue animation 3D
On considere la premiere equation du systeme.On remplace ∆x par h (v(t) + ∆v) :
∆v = h M−1
(f (t) +
∂f
∂xh (v(t) + ∆v) +
∂f
∂v∆v
)Soit I la matrice identite.
⇒(I − hM−1 ∂f
∂v− h2M−1 ∂f
∂x
)∆v = hM−1
(f (t) + h
∂f
∂xv(t)
)⇒(M − h
∂f
∂v− h2 ∂f
∂x
)∆v = h
(f (t) + h
∂f
∂xv(t)
)↪→ Systeme a resoudre pour obtenir ∆v , pour ensuite calculer :{
v(t + h) = v(t) + ∆v ,x(t + h) = x(t) + hv(t + h).
Florence Zara UE M1if37 - Animation en synthese d’image

Simulation d’objets deformablesSysteme masse-ressorts
DefinitionSimulation de textilesTP
Methode d’Euler implicite - Point de vue animation 3D
En resume, utilisation du systeme differentiel reformule[Baraff, Witkin 1998] :
↪→(M − h
∂f
∂v− h2 ∂f
∂x
)∆v = h
(f (t) + h
∂f
∂xv(t)
)1 Evaluation des matrices ∂f
∂x et ∂f∂v
2 Resolution du systeme pour obtenir ∆v3 Calcul des nouvelles positions et vitesses{
v(t + h) = v(t) + ∆vx(t + h) = x(t) + hv(t + h)
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
DefinitionSimulation de textilesTP
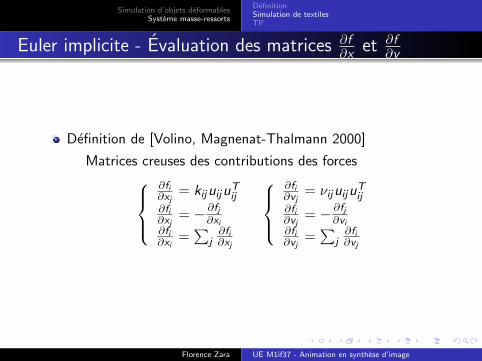
Euler implicite - Evaluation des matrices ∂f∂x et ∂f
∂v
Definition de [Volino, Magnenat-Thalmann 2000]
Matrices creuses des contributions des forces∂fi∂xj
= kijuijuTij
∂fi∂xj
= − ∂fj∂xi
∂fi∂xi
=∑
j∂fi∂xj
∂fi∂vj
= νijuijuTij
∂fi∂vj
= − ∂fj∂vi
∂fi∂vj
=∑
j∂fi∂vj
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
DefinitionSimulation de textilesTP
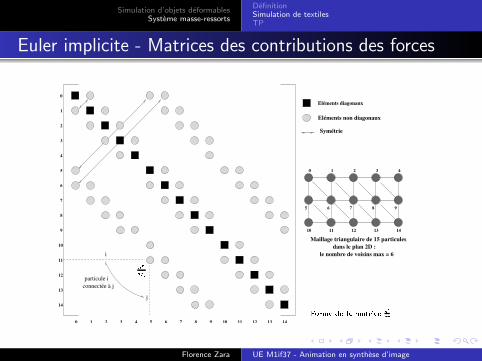
Euler implicite - Matrices des contributions des forces
3
4
5
6
7
8
9
10
11
12
13
14
2
1
0
1413121110
30 1 2 4
5 6 987
3 4 5 6 7 8 140 1 2 9 10 11 12 13
Eléments diagonaux
le nombre de voisins max = 6i
j
Eléments non diagonaux
Symétrie
Maillage triangulaire de 15 particulesdans le plan 2D :
particule i connectée à j
����������
� ��� � ��� ��� � ����������� ���� �
Florence Zara UE M1if37 - Animation en synthese d’image
Simulation d’objets deformablesSysteme masse-ressorts
DefinitionSimulation de textilesTP
Animation a realiser en TP
Travail demande - Regarder la page Web
Recuperer l’archive du code existant
Comprendre et compiler le code grace a la doc
Completer le code :
Fonction d’affichageCalcul des forces, accelerations, vitesses et des positionsRajouter de l’interaction (mouvement coin du tissu)Collision du tissu avec le sol...
Florence Zara UE M1if37 - Animation en synthese d’image


















![Introduction : fatigue gigacyclique - ISTE Group2018-3-9 · de la contrainte [WU 93]. La fréquence de résonance de l’échantillon et le facteur de concentration de la contrainte](https://static.fdocuments.us/doc/165x107/612da3291ecc51586942503f/introduction-fatigue-gigacyclique-iste-group-2018-3-9aade-la-contrainte.jpg)