
MAS 04a TyreDynamics - University of...
13
Modelling of Automotive Systems Tyre Dynamics
Transcript of MAS 04a TyreDynamics - University of...

Modelling of Automotive Systems 1
Tyre Dynamics

Modelling of Automotive Systems 2
Wheels have been used for at least 5700 years. Near the northern side of the Caucasus several graves were found, in which since 3700 BC people had been buried on wagons or carts.

Modelling of Automotive Systems 3
Tires or tyres are pneumatic enclosures used to protect and enhance the effect of wheels.
The earliest tires were bands of iron made by by skilledcraftsman, known as a wheelwright.
The first practical pneumatic tire was made by the Scot John Boyd Dunlop for his son's bicycle, in an effort to prevent the headaches his son had while riding on rough roads.
The pneumatic tire also has effect of vastly reducing rolling resistance compared to a solid tire on rough ground. It is able to "absorb" bumps in the road as it rolls over them without experiencing a reaction force opposite to the direction of travel, as is the case with a solid (or foam-filled) tire.
Pneumatic tires are made of a flexible elastomer material such as rubber with reinforcing materials such as fabric and wire.
Tire companies were first started in the early 20th century. Today over 1 billion tires are produced annually.
Modelling of Automotive Systems 4
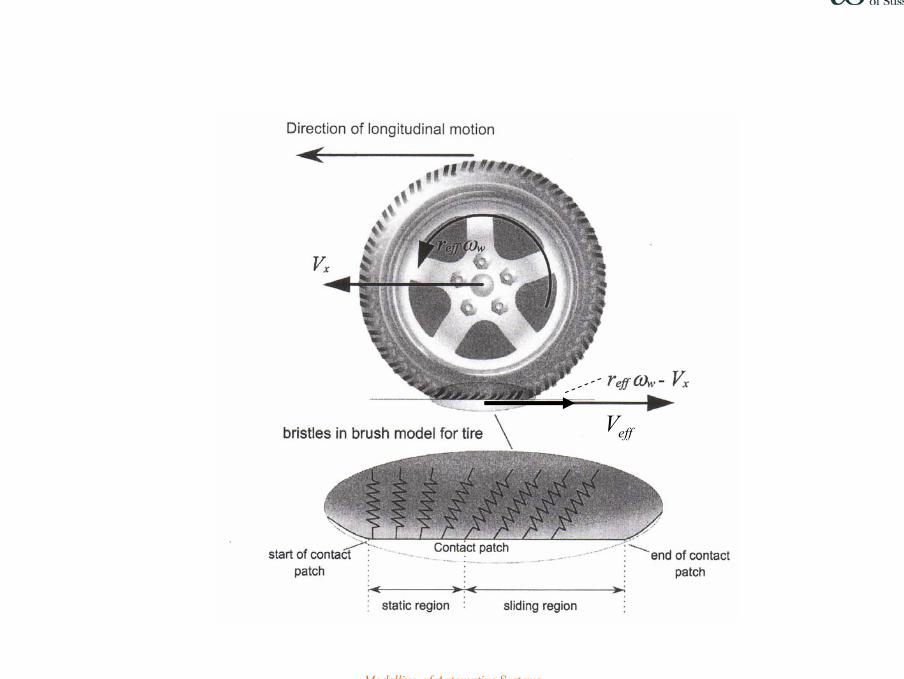
effV

Modelling of Automotive Systems 5
patchcontach thehalf through move to tyreofelement an by taken time
,
)nin tractio when n faster tha isit (
wheel theof velocity llongitudialinear theto relates which radius radius tyreEffective
w
w
−
=
=
=
=
=
−
tt
ar
ra
rV
VrV
Vr
w
eff
eff
effeffx
xeffeff
effeff
φω
φ
φ
ω
ω
ω

Modelling of Automotive Systems 6
=
===
==−
−=
==
−
−
−
w
stat
w
stat
weff
w
statweff
wwstat
t
t
zwstat
weffeff
rr
rr
rr
rrrar
Therefore
rarrk
kFrr
tarV
1
1
1
cos
cossin
i.e.
,cos andsin
sin,cosstiffness tyrevirtical
,
φφ
φφ
φφ
ω

Modelling of Automotive Systems 7
( )
weffstat
stateffstateff
statref
stat
stat
weffw
eff
rrr
rrrr
rror
ra
thenra
rrrar
<<
>>=
=
=
=
<==
φφφφ
φφ
φ
φ
φφ
φ
tan therefore,tan
tan
,tan
,tan
since hand,other On the
,sinSince

Modelling of Automotive Systems 8
Longitudinal tyre force is a function of slip ratio It is linear near slip ratio = 0
xrσrxr
xfσfxf
σCF
σCF
=
=

Modelling of Automotive Systems 9
force tyrealLongitudin
stiffiness tyrecalled are ,
region,linear smallFor
eldriven wheon or mode brakingin on wheel for tyre
moden in tractio on wheel for tyre
as defined are ratio Slip
radius effective
:Slip alLongitudin
interface road- tyreoft coefficienfriction c)load normal )
ratio slip a)
on depends and force tyrealLongitudin
x
x
σrσf
xrσrxr
xfσfxf
x
xweff
x
weff
xweff
weff
eff
xweff
xrxf
CCwhereσCF
σCF
VVr
Vs
rVr
rs
r
Vrs
b
FF
=
=
−==
−==
−
−=
ωσ
ωω
ωσ
ω
Modelling of Automotive Systems 10
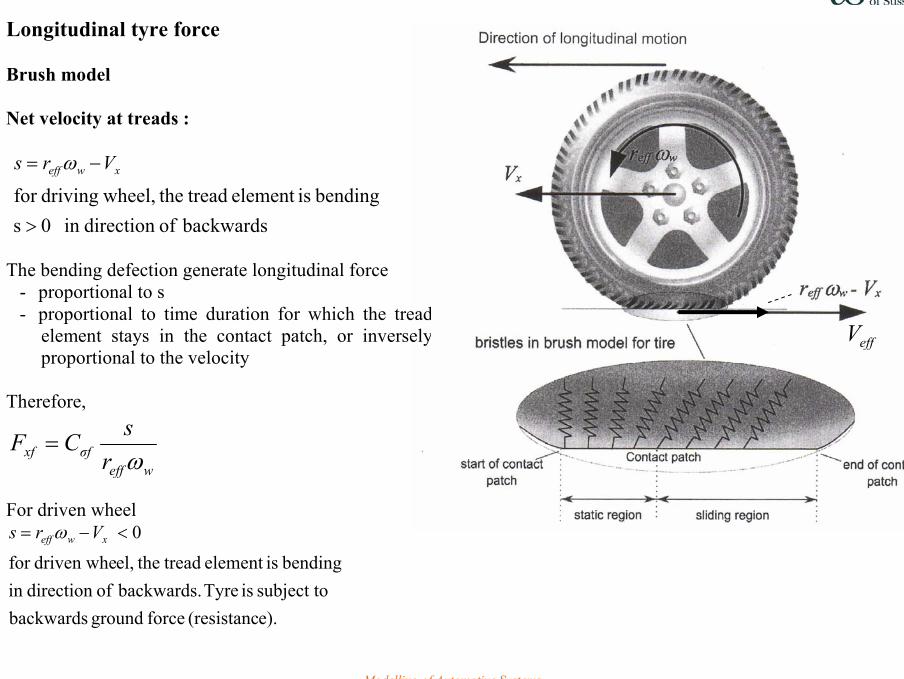
Longitudinal tyre force Brush model Net velocity at treads :
backwards ofdirection in 0s
bending iselement tread the wheel,drivingfor >
−= Vrs xweffω
The bending defection generate longitudinal force
- proportional to s - proportional to time duration for which the tread
element stays in the contact patch, or inverselyproportional to the velocity
Therefore,
r
sCFweff
σfxf ω=
For driven wheel
e).(resistanc force ground backwards subject to is Tyre backwards. ofdirection in
bending iselement tread theel,driven whefor
0<−= Vrs xweffω
effV

Modelling of Automotive Systems 11
stronger force half forward causes Viscousity energy dissapates material tyrein the Damping
patch contact ain n deformatio tyrecauses load Normal resistance Rolling
•••

Modelling of Automotive Systems 12
04.001.0
)( resistance Rolling
xFrRf
FFfRR
zstatx
zrzfxrxf
∆⋅=⋅−=
+−=+

Modelling of Automotive Systems 13
( )
( )θθ
θθ
cossin1
cossin1forces tyreNormal
faaerorf
zr
raaerorf
zf
mglhxmhFll
F
mglhxmhFll
F
+++
=
+−−+
=
&&
&&


















