Markov Chain Monte Carlo: the ultimate multitool - TAPIR Group at
114
Markov Chain Monte Carlo: the ultimate multitool Michele Vallisneri, Jet Propulsion Laboratory Copyright 2013 California Institute of Technology
Transcript of Markov Chain Monte Carlo: the ultimate multitool - TAPIR Group at

Markov Chain Monte Carlo: the ultimate multitool
Michele Vallisneri, Jet Propulsion Laboratory
Copyright 2013 California Institute of Technology

equal-mass BBH Inspiral: PN equations
merger:numerical relativity
ringdown:perturbation theory
GW science in a nutshell: what’s in a waveform?C
alte
ch/C
orne
ll/C
ITA
NR

equal-mass BBH Inspiral: PN equations
merger:numerical relativity
ringdown:perturbation theory
GW science in a nutshell: what’s in a waveform?C
alte
ch/C
orne
ll/C
ITA
NR
HF GWs: stellar masses LF GWs: massive BHs,large separations
astrophysics populations of compact objects;SN and GRB progenitors*
massive BH origin and evolution; Galactic WD-binary populations and interactions
nuclear physics NS EOS, r-mode processes*
cosmology standard sirens*standard sirens*
fundamental gravity strong-field and radiation-sector dynamicsstrong-field and radiation-sector dynamics
black-hole structure tests of no-hair theoremwith EMRIs, ringdowns

p(source parameters|data) = p(d.|s.p.)× p(s.p.)�p(d.|s.p.)× p(s.p.) d(s.p.)

p(source parameters|data) = p(d.|s.p.)× p(s.p.)�p(d.|s.p.)× p(s.p.) d(s.p.)
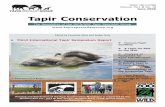
posterior probability:astrophysical insight

p(source parameters|data) = p(d.|s.p.)× p(s.p.)�p(d.|s.p.)× p(s.p.) d(s.p.)
likelihood: prob. thatnoise = signal – model
posterior probability:astrophysical insight

p(source parameters|data) = p(d.|s.p.)× p(s.p.)�p(d.|s.p.)× p(s.p.) d(s.p.)
likelihood: prob. thatnoise = signal – model
posterior probability:astrophysical insight
astrophysicalparameter prior
p(source parameters|data) = p(d.|s.p.)× p(s.p.)�p(d.|s.p.)× p(s.p.) d(s.p.)
likelihood: prob. thatnoise = signal – model
posterior probability:astrophysical insight
astrophysicalparameter prior
evidence: relative prob.that the model is right



spinning BH–BH injection

spinning NS–BH injection



Monte Carlo (Von Neumann and Ulam, 1946):computational techniques that use random numbers

Monte Carlo (Von Neumann and Ulam, 1946):computational techniques that use random numbers

Monte Carlo (Von Neumann and Ulam, 1946):computational techniques that use random numbers

Monte Carlo (Von Neumann and Ulam, 1946):computational techniques that use random numbers
�φ(x)dx → φ =
1
R
�
r
φ(x (r))

accuracy depends only on variance,not on the number of dimensions
var φ =var φ
R
�φ(x)dx → φ =
1
R
�
r
φ(x (r))

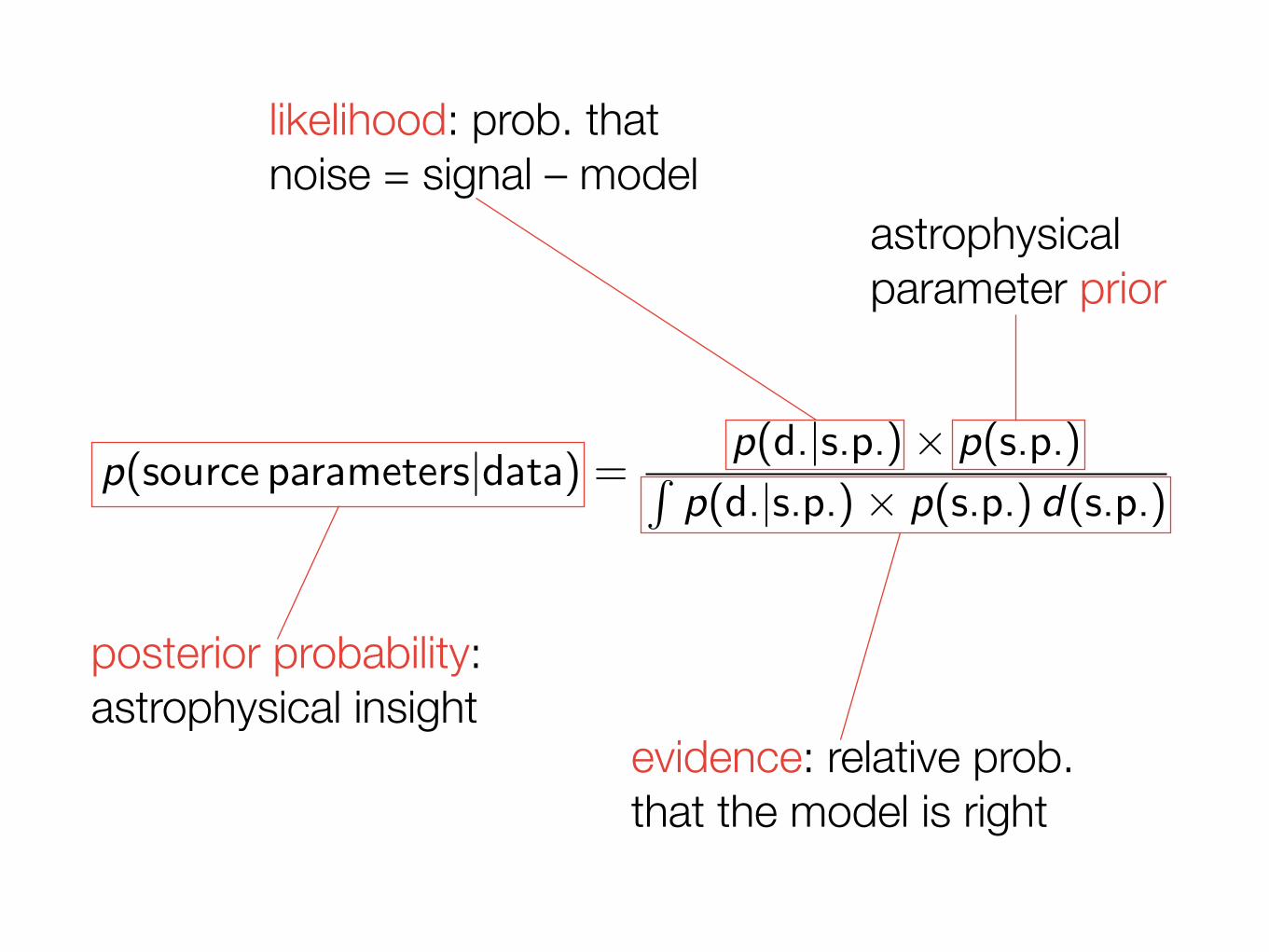
unfortunately uniform sampling is extremelyinefficient in high-dimensional spaces

unfortunately uniform sampling is extremelyinefficient in high-dimensional spaces
Vbox = (2π)d
Vball =(π)d/2
Γ(n/2 + 1)
Vbox
Vball∼ dd
π
−ππ−π
unfortunately uniform sampling is extremelyinefficient in high-dimensional spaces
Vbox = (2π)d
Vball =(π)d/2
Γ(n/2 + 1)
Vbox
Vball∼ dd
π
−ππ−π
(and so are importance samplingand rejection sampling)


Nicholas Metropolis and hisMathematical Analyzer Numerical Integrator And Calculator


Marshall Rosenbluth and Edward Teller


Teller’s crucial suggestion: ensemble averaging...�
φ(x)p(x)dx , with p(x) � e−E(x)/kT
⇓�φ(x)dp(x) � 1
R
�
R
φ(x (r)) with {x (r)}P

...with samples generated by the “Metropolis” algorithm
• given x(r), propose x(r+1) by random walk• accept it if ΔE = E(x(r+1)) – E(x(r)) < 0,
or with probability e–ΔE/kT if ΔE > 0• if not accepted, set x(r+1) = x(r)
• the resulting detailed balance guarantees convergence to P



the rest is history

the rest is history
• (Metropolis–Hastings) algorithm for any P:
• given x(r), propose x(r+1) by Q(xnext; xprev)
• accept it ifr = [P(x(r+1))/P(x(r))]·[Q(x(r); x(r+1))/Q(x(r+1); x(r))] > 1,or with probability r if r < 1
• if not accepted, set x(r+1) = x(r)

but why does it work?


• the Metropolis algorithm implements a Markov Chain {x(r)} with transition probability T(xi;xj) = Tij

• the Metropolis algorithm implements a Markov Chain {x(r)} with transition probability T(xi;xj) = Tij
• T is set by the proposal distribution Q and the transition rule (e.g., Metropolis)

(MacK
ay 2003)initial condition
equilibrium distribution
• the Metropolis algorithm implements a Markov Chain {x(r)} with transition probability T(xi;xj) = Tij
• T is set by the proposal distribution Q and the transition rule (e.g., Metropolis)
• if Tij satisfies certain properties, its repeated application to any initial probability distribution ρ0
j eventually yields the equilibrium distribution ρ*i = Pi

• if Tij satisfies certain properties, its repeated application to any initial probability distribution ρ0
j eventually yields the equilibrium distribution ρ*i = Pi
• if Tij satisfies certain properties, its repeated application to any initial probability distribution ρ0
j eventually yields the equilibrium distribution ρ*i = Pi

• if Tij satisfies certain properties, its repeated application to any initial probability distribution ρ0
j eventually yields the equilibrium distribution ρ*i = Pi
T is a probability0 ≤ Tij ≤ 1,
�
j
Tij = 1
Tij �= Tji

• if Tij satisfies certain properties, its repeated application to any initial probability distribution ρ0
j eventually yields the equilibrium distribution ρ*i = Pi
T is a probability0 ≤ Tij ≤ 1,
�
j
Tij = 1
Tij �= Tji
has at least one eigvecwith λ = 1 (Jordan)
other eigvecs have components that sum to 0

• if Tij satisfies certain properties, its repeated application to any initial probability distribution ρ0
j eventually yields the equilibrium distribution ρ*i = Pi
T is a probability0 ≤ Tij ≤ 1,
�
j
Tij = 1
Tij �= Tji
T is regular (ergodic)∃n, T n
ij > 0
has at least one eigvecwith λ = 1 (Jordan)
other eigvecs have components that sum to 0

• if Tij satisfies certain properties, its repeated application to any initial probability distribution ρ0
j eventually yields the equilibrium distribution ρ*i = Pi
T is a probability0 ≤ Tij ≤ 1,
�
j
Tij = 1
Tij �= Tji
T is regular (ergodic)∃n, T n
ij > 0
has at least one eigvecwith λ = 1 (Jordan)
other eigvecs have components that sum to 0
has one all-positive eigvecwith λ0 > 0; other λs are smaller (Perron–Frobenius)

• if Tij satisfies certain properties, its repeated application to any initial probability distribution ρ0
j eventually yields the equilibrium distribution ρ*i = Pi
T is a probability0 ≤ Tij ≤ 1,
�
j
Tij = 1
Tij �= Tji
T is regular (ergodic)∃n, T n
ij > 0
has at least one eigvecwith λ = 1 (Jordan)
other eigvecs have components that sum to 0
has one all-positive eigvecwith λ0 > 0; other λs are smaller (Perron–Frobenius)
T has a unique,time-independent stationary ρ*

• if Tij satisfies certain properties, its repeated application to any initial probability distribution ρ0
j eventually yields the equilibrium distribution ρ*i = Pi
T is a probability0 ≤ Tij ≤ 1,
�
j
Tij = 1
Tij �= Tji
T is regular (ergodic)∃n, T n
ij > 0
T satisfiesdetailed balanceTαβρ
∗β = Tβαρ
∗α
has at least one eigvecwith λ = 1 (Jordan)
other eigvecs have components that sum to 0
has one all-positive eigvecwith λ0 > 0; other λs are smaller (Perron–Frobenius)
T has a unique,time-independent stationary ρ*

• if Tij satisfies certain properties, its repeated application to any initial probability distribution ρ0
j eventually yields the equilibrium distribution ρ*i = Pi
T is a probability0 ≤ Tij ≤ 1,
�
j
Tij = 1
Tij �= Tji
T is regular (ergodic)∃n, T n
ij > 0
T satisfiesdetailed balanceTαβρ
∗β = Tβαρ
∗α
has at least one eigvecwith λ = 1 (Jordan)
other eigvecs have components that sum to 0
has one all-positive eigvecwith λ0 > 0; other λs are smaller (Perron–Frobenius)
T has a unique,time-independent stationary ρ*
has a full set of eigvecs ρλ derived from those ofQij = Tij
�ρ∗j /ρ
∗i = Qji

• if Tij satisfies certain properties, its repeated application to any initial probability distribution ρ0
j eventually yields the equilibrium distribution ρ*i = Pi
T is a probability0 ≤ Tij ≤ 1,
�
j
Tij = 1
Tij �= Tji
T is regular (ergodic)∃n, T n
ij > 0
T satisfiesdetailed balanceTαβρ
∗β = Tβαρ
∗α
has at least one eigvecwith λ = 1 (Jordan)
other eigvecs have components that sum to 0
has one all-positive eigvecwith λ0 > 0; other λs are smaller (Perron–Frobenius)
T has a unique,time-independent stationary ρ*
has a full set of eigvecs ρλ derived from those ofQij = Tij
�ρ∗j /ρ
∗i = Qji
all initial ρ0
converge to ρ*T nρ0 =
T n(a1ρ∗+
�
|λ|<1
aλρλ) =
a1ρ∗+
�
|λ|<1
aλλnρλ


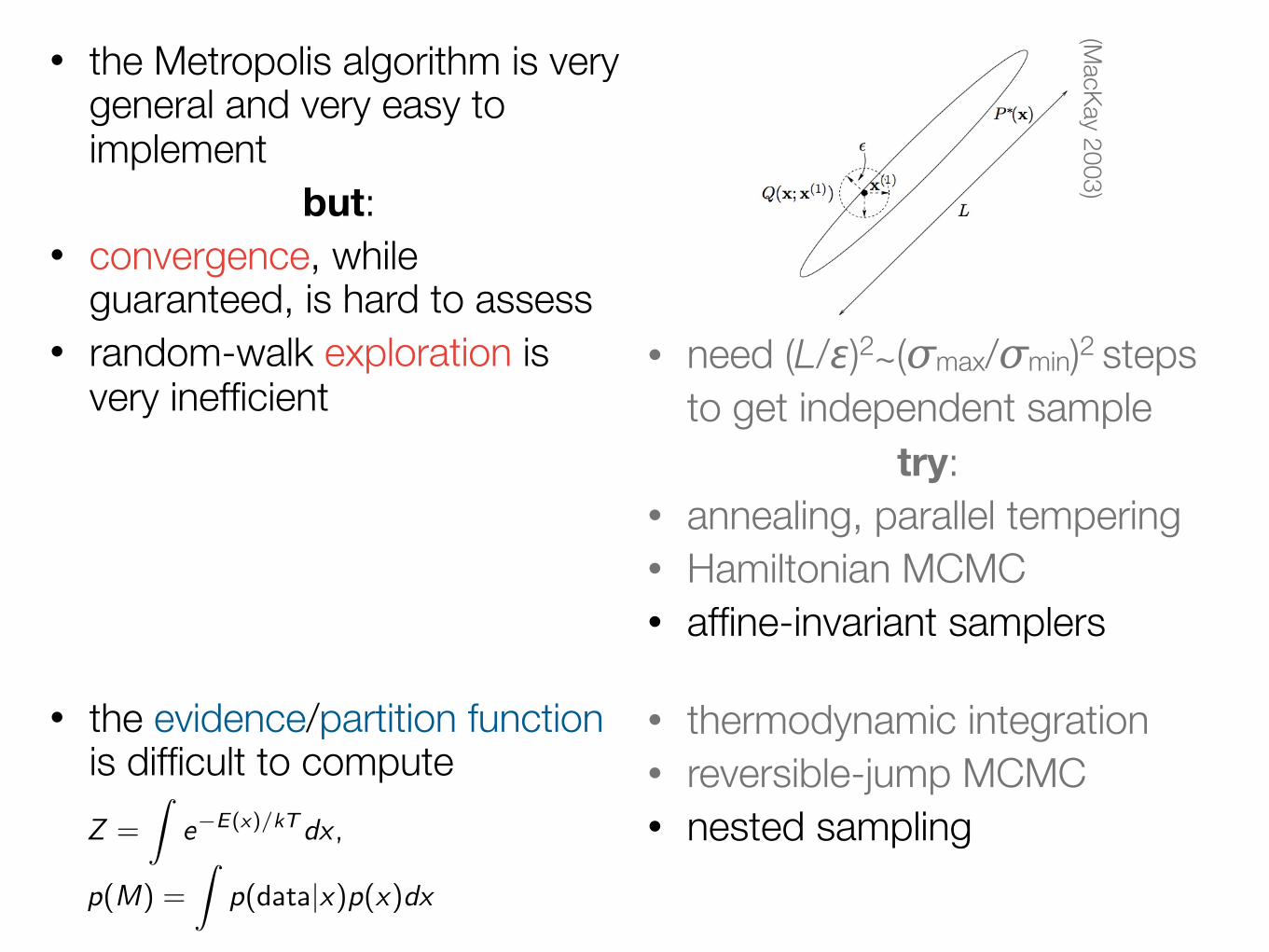
• the Metropolis algorithm is very general and very easy to implement

• the Metropolis algorithm is very general and very easy to implement
but:• convergence, while
guaranteed, is hard to assess• random-walk exploration is
very inefficient

• the Metropolis algorithm is very general and very easy to implement
but:• convergence, while
guaranteed, is hard to assess• random-walk exploration is
very inefficient• need (L/ε)2∼(σmax/σmin)2 steps
to get independent sample
(MacK
ay 2003)

• the Metropolis algorithm is very general and very easy to implement
but:• convergence, while
guaranteed, is hard to assess• random-walk exploration is
very inefficient• need (L/ε)2∼(σmax/σmin)2 steps
to get independent sampletry:
• annealing, parallel tempering• Hamiltonian MCMC• affine-invariant samplers
(MacK
ay 2003)

• the Metropolis algorithm is very general and very easy to implement
but:• convergence, while
guaranteed, is hard to assess• random-walk exploration is
very inefficient
• the evidence/partition function is difficult to compute
• need (L/ε)2∼(σmax/σmin)2 steps to get independent sample
try:• annealing, parallel tempering• Hamiltonian MCMC• affine-invariant samplers
(MacK
ay 2003)
Z =
�e−E(x)/kTdx ,
p(M) =
�p(data|x)p(x)dx
• the Metropolis algorithm is very general and very easy to implement
but:• convergence, while
guaranteed, is hard to assess• random-walk exploration is
very inefficient
• the evidence/partition function is difficult to compute
• need (L/ε)2∼(σmax/σmin)2 steps to get independent sample
try:• annealing, parallel tempering• Hamiltonian MCMC• affine-invariant samplers
• thermodynamic integration• reversible-jump MCMC• nested sampling
(MacK
ay 2003)
Z =
�e−E(x)/kTdx ,
p(M) =
�p(data|x)p(x)dx

Nested sampling(Skilling 2006)

Nested sampling(Skilling 2006)
Z =
�L(θ)π(θ)dθ =
�L(X )dX
X (λ) =
�
L(θ)>λπ(θ)dθ

Nested sampling(Skilling 2006)
Z =
�L(θ)π(θ)dθ =
�L(X )dX
X (λ) =
�
L(θ)>λπ(θ)dθ
Z =�
i
wiLi

Nested sampling(Skilling 2006)
Z =
�L(θ)π(θ)dθ =
�L(X )dX
X (λ) =
�
L(θ)>λπ(θ)dθ
Z =�
i
wiLi
• Z is dominated by a range–H ± √d in log X, so we explore X linearly in log X

Nested sampling(Skilling 2006)
Z =
�L(θ)π(θ)dθ =
�L(X )dX
X (λ) =
�
L(θ)>λπ(θ)dθ
Z =�
i
wiLi
• Z is dominated by a range–H ± √d in log X, so we explore X linearly in log X
• choose each Xi randomly, subject to Xi < Xi–1

Nested sampling(Skilling 2006)
Z =
�L(θ)π(θ)dθ =
�L(X )dX
X (λ) =
�
L(θ)>λπ(θ)dθ
Z =�
i
wiLi
• Z is dominated by a range–H ± √d in log X, so we explore X linearly in log X
• choose each Xi randomly, subject to Xi < Xi–1
• in practice, choose θ fromπ(θ), subject to L(θi) > L(θi–1)

Nested sampling(Skilling 2006)
Z =
�L(θ)π(θ)dθ =
�L(X )dX
X (λ) =
�
L(θ)>λπ(θ)dθ
Z =�
i
wiLi
• Z is dominated by a range–H ± √d in log X, so we explore X linearly in log X
• choose each Xi randomly, subject to Xi < Xi–1
• in practice, choose θ fromπ(θ), subject to L(θi) > L(θi–1) X0 = 1, Xi = tiXi−1, ti ∈ [0, 1]

Nested sampling(Skilling 2006)
• Z is dominated by a range–H ± √d in log X, so we explore X linearly in log X
• choose each Xi randomly, subject to Xi < Xi–1
• in practice, choose θ fromπ(θ), subject to L(θi) > L(θi–1) X0 = 1, Xi = tiXi−1, ti ∈ [0, 1]

Nested sampling(Skilling 2006)
• Z is dominated by a range–H ± √d in log X, so we explore X linearly in log X
• choose each Xi randomly, subject to Xi < Xi–1
• in practice, choose θ fromπ(θ), subject to L(θi) > L(θi–1) X0 = 1, Xi = tiXi−1, ti ∈ [0, 1]
• working with a cloud of Nlive points, keep replacing the least-L member, use it as Xi
X0 = 1, Xi = tiXi−1, p(ti ) = NtN−1i ∈ [0, 1]

Nested sampling(Skilling 2006)
• Z is dominated by a range–H ± √d in log X, so we explore X linearly in log X
• choose each Xi randomly, subject to Xi < Xi–1
• in practice, choose θ fromπ(θ), subject to L(θi) > L(θi–1) X0 = 1, Xi = tiXi−1, ti ∈ [0, 1]
• working with a cloud of Nlive points, keep replacing the least-L member, use it as Xi
•
X0 = 1, Xi = tiXi−1, p(ti ) = NtN−1i ∈ [0, 1]
logXi � (−i ±√i)/N
Z =�
i
wiLi , wi =Xi−1 − Xi+1
2

Nested sampling(Skilling 2006)
• Z is dominated by a range–H ± √d in log X, so we explore X linearly in log X
• choose each Xi randomly, subject to Xi < Xi–1
• in practice, choose θ fromπ(θ), subject to L(θi) > L(θi–1) X0 = 1, Xi = tiXi−1, ti ∈ [0, 1]
• working with a cloud of Nlive points, keep replacing the least-L member, use it as Xi
•
• stop when Z convergesX0 = 1, Xi = tiXi−1, p(ti ) = NtN−1
i ∈ [0, 1]
logXi � (−i ±√i)/N
Z =�
i
wiLi , wi =Xi−1 − Xi+1
2

Nested sampling(Skilling 2006)
• Z is dominated by a range–H ± √d in log X, so we explore X linearly in log X
• choose each Xi randomly, subject to Xi < Xi–1
• in practice, choose θ fromπ(θ), subject to L(θi) > L(θi–1) X0 = 1, Xi = tiXi−1, ti ∈ [0, 1]
• working with a cloud of Nlive points, keep replacing the least-L member, use it as Xi
•
• stop when Z convergesX0 = 1, Xi = tiXi−1, p(ti ) = NtN−1
i ∈ [0, 1]
logXi � (−i ±√i)/N
Z =�
i
wiLi , wi =Xi−1 − Xi+1
2
see bit.ly/multinestby Farhan Feroz, Hobson, Bridges

Affine–invariant sampling(Goodman–Weare 2010)

Affine–invariant sampling(Goodman–Weare 2010)
π(x) ∝ exp
�−(x1 − x2)2
2�− (x1 + x2)2
2
�
hard to sample!

Affine–invariant sampling(Goodman–Weare 2010)
π(x) ∝ exp
�−(x1 − x2)2
2�− (x1 + x2)2
2
�
hard to sample!
πA(y) ∝ exp
�− (y1 + y2)2
2
�y1 =
x1 − x2√�
, y2 = x1 + x2
much better!

• a sampler with affine-invariant transition probabilities would conform automatically to any coordinates (cf. simplex optimization)
Affine–invariant sampling(Goodman–Weare 2010)
π(x) ∝ exp
�−(x1 − x2)2
2�− (x1 + x2)2
2
�
hard to sample!
πA(y) ∝ exp
�− (y1 + y2)2
2
�y1 =
x1 − x2√�
, y2 = x1 + x2
much better!

• a sampler with affine-invariant transition probabilities would conform automatically to any coordinates (cf. simplex optimization)
• G–W ensemble sampler: to update each walker xi (i=1,..,N) in turn propose xi → xj + z⋅(xk – xj), k ≠ j with density g(z) ∝ 1/√z for z ∈ [1/a,a] accept with Metropolis
Affine–invariant sampling(Goodman–Weare 2010)
π(x) ∝ exp
�−(x1 − x2)2
2�− (x1 + x2)2
2
�
hard to sample!
πA(y) ∝ exp
�− (y1 + y2)2
2
�y1 =
x1 − x2√�
, y2 = x1 + x2
much better!
xi
xj
xi,proposed

• a sampler with affine-invariant transition probabilities would conform automatically to any coordinates (cf. simplex optimization)
• G–W ensemble sampler: to update each walker xi (i=1,..,N) in turn propose xi → xj + z⋅(xk – xj), k ≠ j with density g(z) ∝ 1/√z for z ∈ [1/a,a] accept with Metropolis
• the final ensemble approximates the posterior
Affine–invariant sampling(Goodman–Weare 2010)
π(x) ∝ exp
�−(x1 − x2)2
2�− (x1 + x2)2
2
�
hard to sample!
πA(y) ∝ exp
�− (y1 + y2)2
2
�y1 =
x1 − x2√�
, y2 = x1 + x2
much better!
xi
xj
xi,proposed

• a sampler with affine-invariant transition probabilities would conform automatically to any coordinates (cf. simplex optimization)
• G–W ensemble sampler: to update each walker xi (i=1,..,N) in turn propose xi → xj + z⋅(xk – xj), k ≠ j with density g(z) ∝ 1/√z for z ∈ [1/a,a] accept with Metropolis
• the final ensemble approximates the posterior
Affine–invariant sampling(Goodman–Weare 2010)
π(x) ∝ exp
�−(x1 − x2)2
2�− (x1 + x2)2
2
�
hard to sample!
πA(y) ∝ exp
�− (y1 + y2)2
2
�y1 =
x1 − x2√�
, y2 = x1 + x2
much better!
see dan.iel.fm/emceeby Daniel Foreman-Mackey et al.
xi
xj
xi,proposed

Discussion

Discussion
God is always in the details...

Discussion
God is always in the details......but the transcendent is experienced, never proved

Discussion
God is always in the details......but the transcendent is experienced, never proved
Trust no one...

Discussion
God is always in the details......but the transcendent is experienced, never proved
Trust no one......because there’s no free lunch

Discussion
God is always in the details......but the transcendent is experienced, never proved
Trust no one......because there’s no free lunch(not even with genetically engineered algorithms)

Discussion
God is always in the details......but the transcendent is experienced, never proved
Trust no one......because there’s no free lunch(not even with genetically engineered algorithms)
Parallelization is hard...

Discussion
God is always in the details......but the transcendent is experienced, never proved
Trust no one......because there’s no free lunch(not even with genetically engineered algorithms)
Parallelization is hard......but Gaussian integrals are easy

Discussion
God is always in the details......but the transcendent is experienced, never proved
Trust no one......because there’s no free lunch(not even with genetically engineered algorithms)
Parallelization is hard......but Gaussian integrals are easy
But harnessing the power of stochastic physical systems,that’s just cool!
Backup slides
Michele Vallisneri, Jet Propulsion Laboratory
Copyright 2013 California Institute of Technology

GW science in a nutshell:GW detection with addition, subtraction, and multiplication
�4 �2 0 2 4�3
�2
�1
0
1
2
3
�4 �2 0 2 4�3
�2
�1
0
1
2
3
�4 �2 0 2 4�3
�2
�1
0
1
2
3
+ =
(SNR = 5)
data = signal + noise

therefore: noise = data – signal; to assess detection,we ask which instance of noise is more probable?
or�4 �2 0 2 4�3
�2
�1
0
1
2
3
�4 �2 0 2 4�3
�2
�1
0
1
2
3
�4 �2 0 2 4�3
�2
�1
0
1
2
3
(no signal)

therefore: noise = data – signal; to assess detection,we ask which instance of noise is more probable?
or�4 �2 0 2 4�3
�2
�1
0
1
2
3
�4 �2 0 2 4�3
�2
�1
0
1
2
3
�4 �2 0 2 4�3
�2
�1
0
1
2
3
(no signal)
�4 �2 0 2 4�3
�2
�1
0
1
2
3
�4 �2 0 2 4�3
�2
�1
0
1
2
3
�4 �2 0 2 4�3
�2
�1
0
1
2
3
= –
�4 �2 0 2 4�3
�2
�1
0
1
2
3
�4 �2 0 2 4�3
�2
�1
0
1
2
3
�4 �2 0 2 4�3
�2
�1
0
1
2
3
�4 �2 0 2 4�3
�2
�1
0
1
2
3
�4 �2 0 2 4�3
�2
�1
0
1
2
3
�4 �2 0 2 4�3
�2
�1
0
1
2
3
(signal hidden in noise,so we subtract it out)

therefore: noise = data – signal; to assess detection,we ask which instance of noise is more probable?
or�4 �2 0 2 4�3
�2
�1
0
1
2
3
�4 �2 0 2 4�3
�2
�1
0
1
2
3
�4 �2 0 2 4�3
�2
�1
0
1
2
3
(no signal)
�4 �2 0 2 4�3
�2
�1
0
1
2
3
�4 �2 0 2 4�3
�2
�1
0
1
2
3
�4 �2 0 2 4�3
�2
�1
0
1
2
3
= –
�4 �2 0 2 4�3
�2
�1
0
1
2
3
�4 �2 0 2 4�3
�2
�1
0
1
2
3
�4 �2 0 2 4�3
�2
�1
0
1
2
3
�4 �2 0 2 4�3
�2
�1
0
1
2
3
�4 �2 0 2 4�3
�2
�1
0
1
2
3
�4 �2 0 2 4�3
�2
�1
0
1
2
3
(signal hidden in noise,so we subtract it out)
the ratio of probabilities is ~ exp SNR2/2, (here ~ 270,000)

an intuitive interpretation of this processis in terms of correlation products/matched filtering
0 20 40 60 80 100
�1.0
�0.5
0.0
0.5
1.0
0 20 40 60 80 1000.0
0.5
1.0
1.5
0 20 40 60 80 100
�2
�1
0
1
2
0 20 40 60 80 100
�1.0
�0.5
0.0
0.5
1.0
1.5
2.0
0 20 40 60 80 100
�1.0
�0.5
0.0
0.5
1.0
0 20 40 60 80 100
�1.0
�0.5
0.0
0.5
1.0
x = →∫
25
x = →∫
3.39

an intuitive interpretation of this processis in terms of correlation products/matched filtering
detectordata
signal“template”
(Chad Hanna)

an intuitive interpretation of this processis in terms of correlation products/matched filtering
�10 0 10 20 30 400.00
0.02
0.04
0.06
0.08
no signal with signal
threshold
detectordata
signal“template”
(Chad Hanna)

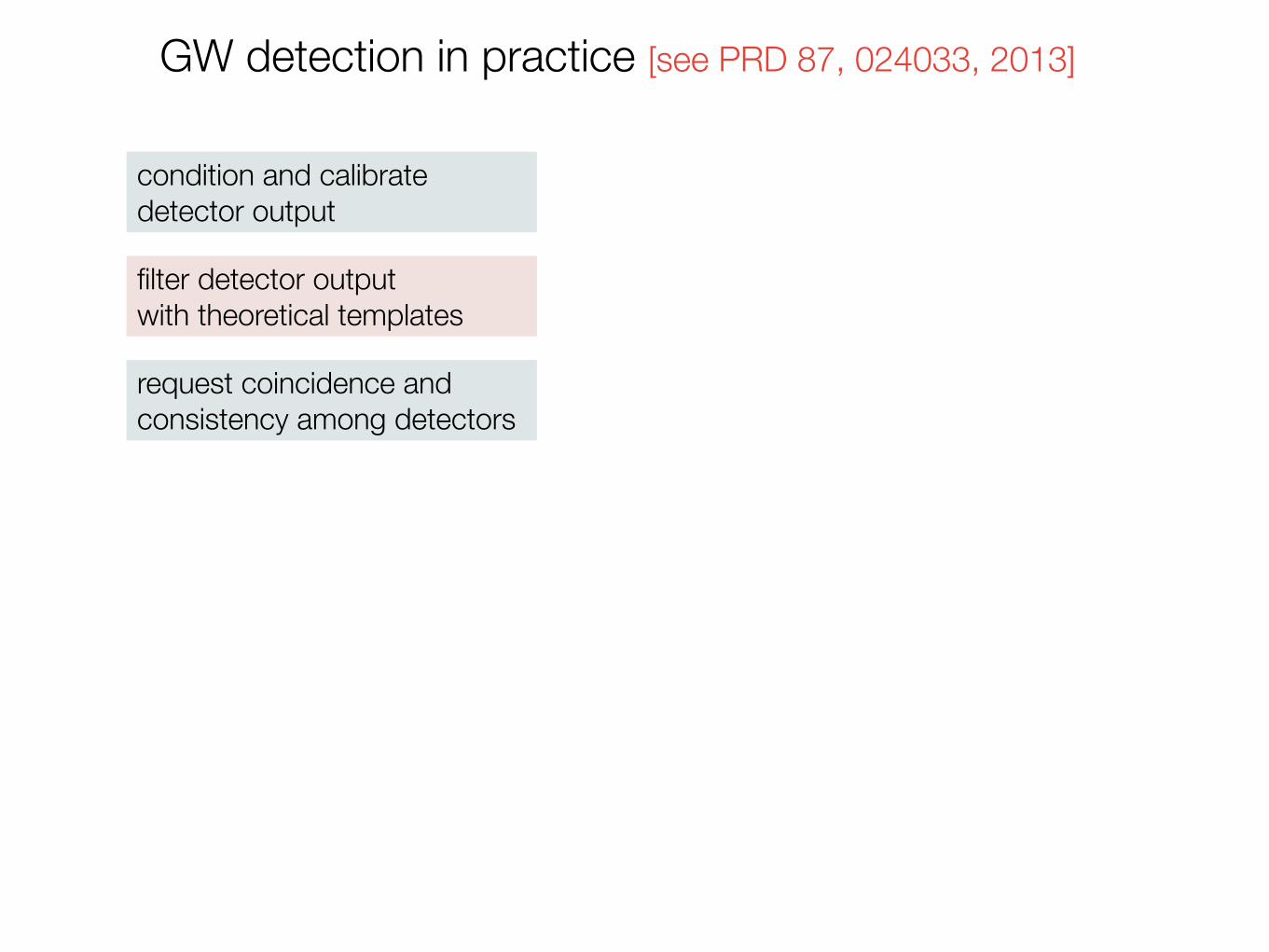
30 GW detection in practice [see PRD 87, 024033, 2013]
filter detector outputwith theoretical templates

30 GW detection in practice [see PRD 87, 024033, 2013]
filter detector outputwith theoretical templates
condition and calibrate detector output
30 GW detection in practice [see PRD 87, 024033, 2013]
filter detector outputwith theoretical templates
condition and calibrate detector output
request coincidence and consistency among detectors

30 GW detection in practice [see PRD 87, 024033, 2013]
filter detector outputwith theoretical templates
condition and calibrate detector output
request coincidence and consistency among detectors
apply data-quality cutsand signal vetos

30 GW detection in practice [see PRD 87, 024033, 2013]
filter detector outputwith theoretical templates
condition and calibrate detector output
request coincidence and consistency among detectors
apply data-quality cutsand signal vetos
estimate statistical significance
(estimate background, using coincidence between time slides)

30 GW detection in practice [see PRD 87, 024033, 2013]
filter detector outputwith theoretical templates
condition and calibrate detector output
request coincidence and consistency among detectors
apply data-quality cutsand signal vetos
estimate statistical significance
(estimate background, using coincidence between time slides)
follow up candidateswith detection checklist

30 GW detection in practice [see PRD 87, 024033, 2013]
filter detector outputwith theoretical templates
condition and calibrate detector output
request coincidence and consistency among detectors
apply data-quality cutsand signal vetos
estimate statistical significance
(estimate background, using coincidence between time slides)
claim detection!
follow up candidateswith detection checklist

get upper limit
(estimate efficiency from injections, number of galaxies within horizon)
30 GW detection in practice [see PRD 87, 024033, 2013]
filter detector outputwith theoretical templates
condition and calibrate detector output
request coincidence and consistency among detectors
apply data-quality cutsand signal vetos
estimate statistical significance
(estimate background, using coincidence between time slides)
claim detection!
follow up candidateswith detection checklist

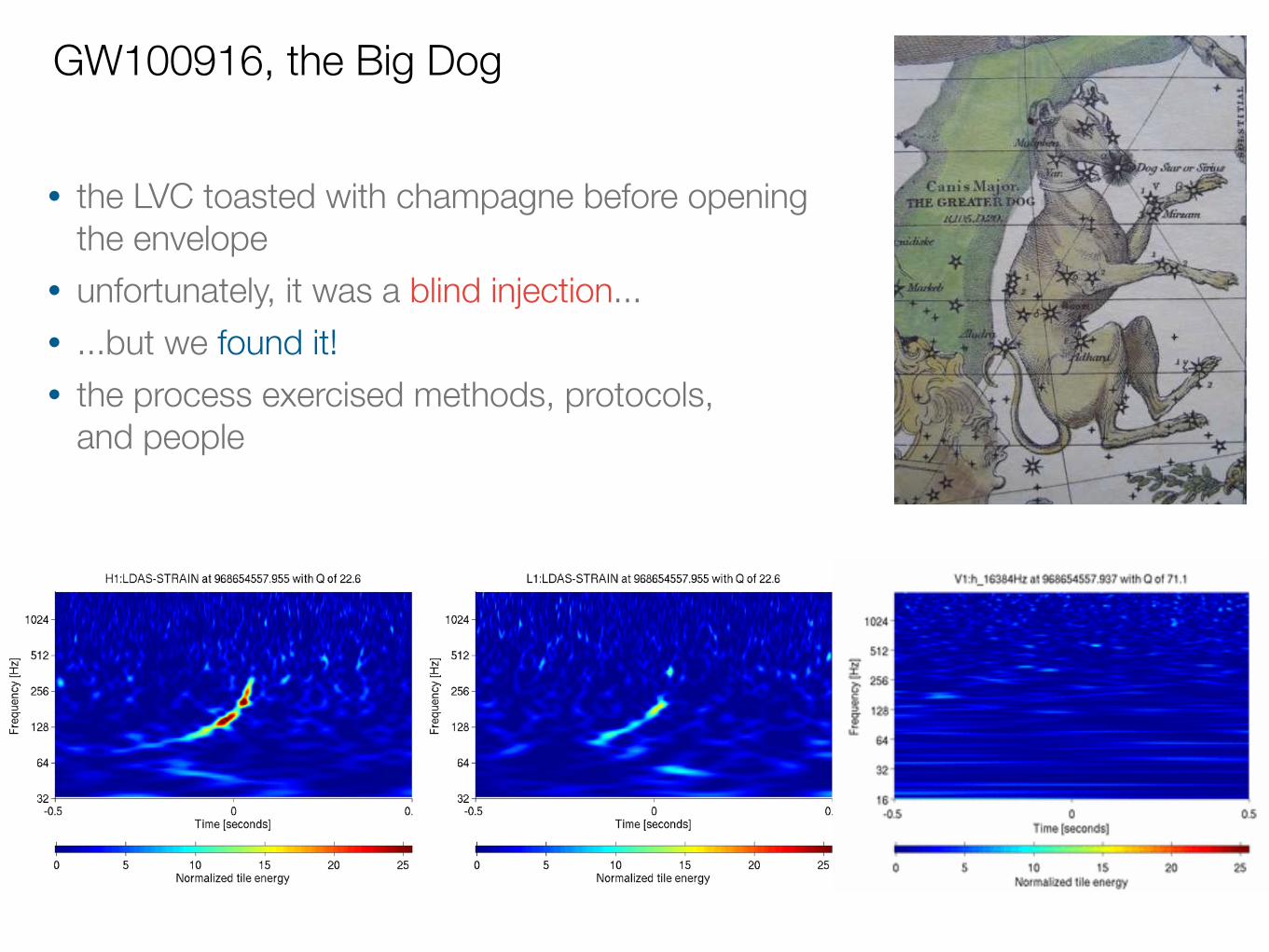
GW100916, the Big Dog

GW100916, the Big Dog

GW100916, the Big Dog
• the LVC toasted with champagne before opening the envelope

GW100916, the Big Dog
• the LVC toasted with champagne before opening the envelope
• unfortunately, it was a blind injection...

GW100916, the Big Dog
• the LVC toasted with champagne before opening the envelope
• unfortunately, it was a blind injection...• ...but we found it!
GW100916, the Big Dog
• the LVC toasted with champagne before opening the envelope
• unfortunately, it was a blind injection...• ...but we found it!• the process exercised methods, protocols,
and people

GW100916, the Big Dog
• the LVC toasted with champagne before opening the envelope
• unfortunately, it was a blind injection...• ...but we found it!• the process exercised methods, protocols,
and people• it showed the perils of theory, experiment, software

O =P(AG|s)
P(GR|s)=P(AG)
�p(s |θi ,a) p(θi ,a) dθi ,a
P(GR)�p(s |θi) p(θi) dθi
evidence (= marginal likelihood)for AG and GR models
model priors
likelihood
parameter priors
AG parameters
GR parameters
x is a normal random variable with zero meanand unit variance (a function on noise realization)
renormalized odds ratios (model priorsand Occam factors cancel out, see paper)
O�AG = e
x2/2+x√2(1−FF) SNR+(1−FF) SNR2
O�GR = e
x2/2
background: true signal is GR detection efficiency: true signal is AG
we design a decision scheme (“AG or GR?”) with the Bayesian odds ratio as the detection statistic; we set a threshold and claim detection when
O O∗
O > O∗
SNR=10FF=0.95
SNR=15FF=0.95
5% false alarms
logO�AGlogO�
GR
distributionof
distributionof
88%detections
99%detections
0.10
0.05
00 5 10 15 205 10 15 20
thresholdlogO∗ = 2

for strong signals, and are remarkably simple functions of FF and SNR alone. For a fixed false-alarm rate, we then askwhat SNR yields 50%-efficient AG detection, as a function of FF
!" !# !$ !% !& !' !( !) *
+,-./0,-,1203040)*!&)**5***
)5***
)*
)*5***
)5***
)*
)**
-67)*
3040)*!"
SNR required forAG detectionwith 50% efficiency
number of events in a volume-limited search to yield that SNR as the loudest event
only very strong AG effects (FF of 0.9–0.99) would be seen in volume-limited searches, so GR tests may have to wait for third-generation ground-based detectors, or for space detectors
O�GR O
�AG

if model signals (GR) differ from true signals (MG) with the same parameters, the best-fitting template will be displaced by theoretical error, which isSNR-independent [see Cutler & Vallisneri 2007]
an application [Vallisneri and Yunes, arXiv/1301.2627]:“fundamental” bias versus the detection of modified gravity
manifold of truesignals
approximated signals
hGR(θtrue)
hAPP(θtrue)
hGR(θbest)∆θ
δh
4
where (a, b) ∈ Z, with (a, b) > (−10,−15) [44].
In this paper we concentrate on phasing cor-
rections by setting α = 0 and choosing b ∈{−7,−6,−5,−4,−3,−2,−1, 1, 2}. Different values of brepresent different types of MG effects: b = −7 cor-
responds to the leading–PN-order correction in Brans–
Dicke theory [8, 9, 14–16, 23, 45] or in Einstein–dilaton–
Gauss–Bonnet gravity [19, 46]; b = −3 to the leading-
order term in a phenomenological massive graviton the-
ory [9, 11, 12, 14, 22, 25, 45], b ≥ −5 (but �= −4) to
the modified-PN scheme of Refs. [4–7], and b = −1 to
dynamical Chern–Simons gravity [19, 21, 47]. Notice, in
particular, that the modified-PN scheme is clearly a sub-
case of the ppE scheme. We omit b = 0 because the
resulting correction would be degenerate with an arbi-
trary constant in the phase. We do not consider b < −7
because the values that we study provide enough infor-
mation to observe a consistent trend as b becomes more
negative. Moreover, for b ≤ −7, binary pulsar observa-
tions can do a better job at constraining modified gravity
theories than GWs observations [48]. We do not consider
b > 2, as this would correspond to terms of higher than
3.5 PN order, which we do not account for in the ΨGR.
B. Quantifying the bias
Let us assume that a GW detection is reported for a
dataset s that contains the waveform
hfull(�θtr) = h(�θtr) + δh(�θtr), (8)
where �θtr is the vector of parameters that describes the
GW source and source–detector geometry, h is the ap-
proximated waveform family used to filter the data, and
δh is the unmodeled correction to h. Following Cutler
and Vallisneri [30], we compute the theoretical error δ�θthinduced by matched-filtering with h instead of hfull.
The theoretical error δ�θth is defined as the displace-
ment �θbf − �θtr between the true parameters �θtr and the
best-fit parameters �θbf that would maximize the like-
lihood in the absence of noise. When δh(�θtr) is neg-
ligibly small, �θbf = �θtr; as δh(�θtr) grows in magni-
tude, �θbf is displaced further and further away along the
parameter-space direction in which h(�θbf) can reproduce
h(�θtr) + δh(�θtr) most closely.
To leading order in δh, δ�θth is given by [30]
δ�θth = (F−1bf )
αβ�h,β(
�θbf)��δh(�θbf)
�, (9)
where h,β = ∂h/∂θβ are partial derivatives of the wave-
form with respect to source parameters, Fαβ = (h,α|h,β)
is the Fisher matrix, here evaluated at θbf , and
(g1|g2) = 4Re
� ∞
0
g1∗(f)g2(f)
Sn(f)df, (10)
is the noise-weighted signal inner product, with Sn(f)the one-sided power spectral density of detector noise
(see, e.g., [38]). The inner product defines a signal norm|h| by way of |h|2 = (h|h).In Eq. (9), the waveform correction δh is projected
onto the waveform derivatives, and the projection cosines
are mapped into parameter errors by the inverse Fisher
matrix F−1, thus taking into account possible parameter
covariances. Note that the resulting δ�θth is independent
of the detection SNR, since both F and (h,β(θbf)|δh(θbf))are quadratic in the waveform amplitude.
Equation (9) is only accurate for small δ�θth—more pre-
cisely, for perturbations small enough that h(�θbf−δ�θth) �h(�θbf)− h,αδθαth. Cutler and Vallisneri [30] discuss more
sophisticated versions of Eq. (9) that can be applied to
larger perturbations, but in this paper we adopt the sim-
pler Eq. (9), not least because the other ingredients in
our formulation depend on δh(�θtr) being small.
C. Detecting modified gravity
Following Vallisneri [31] (see also [3]), we define a MG
correction δh to the signal h to be detectable when the
odds ratio of the Bayesian evidences for the MG and
pure-GR scenarios, used as a detection statistic, is large
enough that the false-alarm probability of favoring the
MG hypothesis when GR is in fact correct is suitably
small. More precisely, we compute the odds ratio
O =P (MG|s)
P (GR|s)=
P (MG)�p(s|�θ,�λ) p(�θ,�λ) dkθ dmλ
P (GR)�p(s|�θ) p(�θ) dkθ
,
(11)
where P (MG) and P (GR) are the prior probabilities that
MG and GR are correct, p(s|�θ,�λ) is the likelihood that
the detector data s contains the MG waveform h(�θ) +δh(�θ,�λ), p(s|�θ) is the likelihood that s contains the pure-
GR waveform h(�θ), and p(�θ,�λ) = p(�θ)p(�λ) and p(�θ) are
the prior probability densities for the source parameters
�θ and the MG parameters �λ.If the true signal is MG, using MG templates would
improve the fit to the data and increase the maximum
value attained by the MG likelihood relative to the GR
likelihood. On the other hand, the evidence for the more
complicated, higher-dimensional MG model is reduced
by the smaller prior mass within the support of the
likelihood—the mechanism by which Bayesian inference
embodies Occam’s principle of parsimony. As signals get
stronger, the improvement in the likelihood grows expo-
nentially with the (squared) detection SNR, and eventu-
ally it overcomes the effect of the priors.
Even if we fix the true signal, the odds ratio O remains
a random variable, because it depends on the realization
of detector noise, by way of the likelihoods. For suffi-
ciently large detection SNR, it can be shown [31] that
Eq. (11) becomes remarkably simple: for the cases when
the underlying signal is pure-GR or MG respectively, we

if model signals (GR) differ from true signals (MG) with the same parameters, the best-fitting template will be displaced by theoretical error, which isSNR-independent [see Cutler & Vallisneri 2007]
an application [Vallisneri and Yunes, arXiv/1301.2627]:“fundamental” bias versus the detection of modified gravity
manifold of truesignals
approximated signals
hGR(θtrue)
hAPP(θtrue)
hGR(θbest)∆θ
δh
4
where (a, b) ∈ Z, with (a, b) > (−10,−15) [44].
In this paper we concentrate on phasing cor-
rections by setting α = 0 and choosing b ∈{−7,−6,−5,−4,−3,−2,−1, 1, 2}. Different values of brepresent different types of MG effects: b = −7 cor-
responds to the leading–PN-order correction in Brans–
Dicke theory [8, 9, 14–16, 23, 45] or in Einstein–dilaton–
Gauss–Bonnet gravity [19, 46]; b = −3 to the leading-
order term in a phenomenological massive graviton the-
ory [9, 11, 12, 14, 22, 25, 45], b ≥ −5 (but �= −4) to
the modified-PN scheme of Refs. [4–7], and b = −1 to
dynamical Chern–Simons gravity [19, 21, 47]. Notice, in
particular, that the modified-PN scheme is clearly a sub-
case of the ppE scheme. We omit b = 0 because the
resulting correction would be degenerate with an arbi-
trary constant in the phase. We do not consider b < −7
because the values that we study provide enough infor-
mation to observe a consistent trend as b becomes more
negative. Moreover, for b ≤ −7, binary pulsar observa-
tions can do a better job at constraining modified gravity
theories than GWs observations [48]. We do not consider
b > 2, as this would correspond to terms of higher than
3.5 PN order, which we do not account for in the ΨGR.
B. Quantifying the bias
Let us assume that a GW detection is reported for a
dataset s that contains the waveform
hfull(�θtr) = h(�θtr) + δh(�θtr), (8)
where �θtr is the vector of parameters that describes the
GW source and source–detector geometry, h is the ap-
proximated waveform family used to filter the data, and
δh is the unmodeled correction to h. Following Cutler
and Vallisneri [30], we compute the theoretical error δ�θthinduced by matched-filtering with h instead of hfull.
The theoretical error δ�θth is defined as the displace-
ment �θbf − �θtr between the true parameters �θtr and the
best-fit parameters �θbf that would maximize the like-
lihood in the absence of noise. When δh(�θtr) is neg-
ligibly small, �θbf = �θtr; as δh(�θtr) grows in magni-
tude, �θbf is displaced further and further away along the
parameter-space direction in which h(�θbf) can reproduce
h(�θtr) + δh(�θtr) most closely.
To leading order in δh, δ�θth is given by [30]
δ�θth = (F−1bf )
αβ�h,β(
�θbf)��δh(�θbf)
�, (9)
where h,β = ∂h/∂θβ are partial derivatives of the wave-
form with respect to source parameters, Fαβ = (h,α|h,β)
is the Fisher matrix, here evaluated at θbf , and
(g1|g2) = 4Re
� ∞
0
g1∗(f)g2(f)
Sn(f)df, (10)
is the noise-weighted signal inner product, with Sn(f)the one-sided power spectral density of detector noise
(see, e.g., [38]). The inner product defines a signal norm|h| by way of |h|2 = (h|h).In Eq. (9), the waveform correction δh is projected
onto the waveform derivatives, and the projection cosines
are mapped into parameter errors by the inverse Fisher
matrix F−1, thus taking into account possible parameter
covariances. Note that the resulting δ�θth is independent
of the detection SNR, since both F and (h,β(θbf)|δh(θbf))are quadratic in the waveform amplitude.
Equation (9) is only accurate for small δ�θth—more pre-
cisely, for perturbations small enough that h(�θbf−δ�θth) �h(�θbf)− h,αδθαth. Cutler and Vallisneri [30] discuss more
sophisticated versions of Eq. (9) that can be applied to
larger perturbations, but in this paper we adopt the sim-
pler Eq. (9), not least because the other ingredients in
our formulation depend on δh(�θtr) being small.
C. Detecting modified gravity
Following Vallisneri [31] (see also [3]), we define a MG
correction δh to the signal h to be detectable when the
odds ratio of the Bayesian evidences for the MG and
pure-GR scenarios, used as a detection statistic, is large
enough that the false-alarm probability of favoring the
MG hypothesis when GR is in fact correct is suitably
small. More precisely, we compute the odds ratio
O =P (MG|s)
P (GR|s)=
P (MG)�p(s|�θ,�λ) p(�θ,�λ) dkθ dmλ
P (GR)�p(s|�θ) p(�θ) dkθ
,
(11)
where P (MG) and P (GR) are the prior probabilities that
MG and GR are correct, p(s|�θ,�λ) is the likelihood that
the detector data s contains the MG waveform h(�θ) +δh(�θ,�λ), p(s|�θ) is the likelihood that s contains the pure-
GR waveform h(�θ), and p(�θ,�λ) = p(�θ)p(�λ) and p(�θ) are
the prior probability densities for the source parameters
�θ and the MG parameters �λ.If the true signal is MG, using MG templates would
improve the fit to the data and increase the maximum
value attained by the MG likelihood relative to the GR
likelihood. On the other hand, the evidence for the more
complicated, higher-dimensional MG model is reduced
by the smaller prior mass within the support of the
likelihood—the mechanism by which Bayesian inference
embodies Occam’s principle of parsimony. As signals get
stronger, the improvement in the likelihood grows expo-
nentially with the (squared) detection SNR, and eventu-
ally it overcomes the effect of the priors.
Even if we fix the true signal, the odds ratio O remains
a random variable, because it depends on the realization
of detector noise, by way of the likelihoods. For suffi-
ciently large detection SNR, it can be shown [31] that
Eq. (11) becomes remarkably simple: for the cases when
the underlying signal is pure-GR or MG respectively, we

representing modified gravity as “parametrized post-Einstein,”we compare the MG SNRdetect with the SNRbias where δθth > δθstat
3
Mismodeling bias is remedied by deriving ever more
accurate solutions to the field equations: for binary in-
spirals, this goal is currently pursued by pushing the
PN approximation to higher orders, and by integrating
together PN and numerical-relativity results with ana-
lytical resummation and fitting techniques, such as the
effective-one-body scheme. Instrumental bias is reduced
by careful detector modeling and characterization. As-
trophysical bias is expected to be irrelevant for most
ground-based binary observations; but even if this were
not the case, astrophysical effects should present them-
selves differently (or not at all) in observations of differ-ent systems, whereas fundamental bias, if present, would
appear equally in all observed systems.
In this paper, we concentrate on the inspiral signals
from compact-binary coalescences. We consider inspirals
that are circular and adiabatic, with negligible spin ef-
fects, and neglect mismodeling bias by assuming the GW
emission is well-described by the restricted PN waveform
in the frequency-domain, stationary-phase approxima-
tion [38–41]. In GR, the resulting signals can be written
as
hGR(f) = AGR(f)eiΨGR(f) , (1)
where AGR(f) = Au−7/6 [1 + · · · ] (we neglect PN ampli-
tude corrections, symbolized with ellipses in the above
equation), u = πMf is the reduced frequency, M =
η3/5M the chirp mass, η = m1m2/M2 the symmetric
mass ratio, M = m1+m2 the total mass, and f the GW
frequency. The constant amplitude A depends on the
chirp mass, the luminosity distance, and the detector’s
antenna patterns [38–41]. The quantity ΨGR(f) in Eq.
(1) is the GW phase, given in the PN approximation by
ΨGR = 2πftc − φc −π
4
+3u−5/3
128
�1 +
7�
k=2
�ψk +
1
3ψk log(u)
�η−k/5uk/3
�,
(2)
where the constant coefficients (ψk, ψk) can be found (for
instance) in Ref. [30].
Under these assumptions, the unmodeled corrections
enumerated above can be represented by a continuous
and (in principle) predictable deformation of the GW
phase Ψ(f) and amplitude A(f). The particular defor-
mation depends on the systematic effect. For mismod-
eling, we expect corrections within the structure of the
PN series (δA ∝ f−7/6+kA/3 for the amplitude and δΨ ∝f−5/3+kφ/3 for the phase, with integers kA, kφ > 0), be-
yond the highest known perturbative order (i.e., kA > 5
for the amplitude and kφ > 7 for the phase).
For astrophysical effects, we expect corrections to arise
almost always with “negative” PN exponents [33, 36, 37,
42]. For example, an accretion disk [42], the presence of a
third body [36], and orbital eccentricity [42] all introduce
GW phase corrections δΨ ∝ f−5/3−k�φ , with integer k�φ >
0. Physically, this frequency-dependence corresponds to
astrophysical effects becoming less important for tighter
binaries, where strong-field effects become dominant.
Moving on to unmodeled corrections originating from
fundamental physics, the amplitude and phase deforma-
tions δA and δΨ can always be expressed as sums of fre-
quency powers, provided that δA and δΨ remain analyticat all frequencies sampled during the inspiral:
δA = AGR(f)K�
k=1
αkuak , δΨ(f) =
K�
k=1
βkubk , (3)
where (αk,βk, ak, bk) ∈ R for all k, and where we have
included the AGR prefactor in δA. We have neglected
possible logarithmic terms for simplicity, but they can
be included easily in the same fashion. This ppE model
introduces 4K new parameters in the waveform; the sim-
plest version of this model would allow only a single ex-
ponent:
δA = AGR(f)αua , δΨ(f) = β ub . (4)
Indeed, it can be shown that such a parametric defor-
mation is sufficiently general to model all known MG
corrections to the waveform to leading PN order [2, 3],
provided that the two tensor polarizations are dominant,
as in GR. Otherwise, a second term would be needed in
the phase and amplitude [43, 44].
Furthermore, a convincing argument can be made that
a and b should be restricted to a few discrete values [44].
Suppose that the adiabatic-inspiral waveform is derived
from an energy-balance equation with modified binding
energy and flux of the form
E = E0 v2�1 + (· · · )PN + δE vk
�, (5)
E = E0 v10
�1 + (· · · )PN + δE vm
�, (6)
where v is the relative velocity of the binary components,
ellipses stand for higher-order PN terms, and E0, E0, δEand δE are all constants that may depend on the source
parameters and on the MG coupling constants. The ex-
ponents k and m must be integers, otherwise E or Ewould not be analytic, and we would lose the guaran-
tee that the equations have a unique solution of hyper-
bolic character by the Picard–Lindelof theorem3. Fur-
thermore, we must have k ≥ −2 and m ≥ −10, otherwise
E and E would not reduce to the GR result in the weak-
field limit. These constraints lead to the deformations
δA = AGR(f)αua/3 , δΨ(f) = β ub/3 , (7)
3 Given the differential equation dy/dt = f(t, y(t)), with initialvalue y(t0) = y0, a unique solution exists for all t ∈ (t0−�, t0+�)provided that f is Lipschitz continuous in y and continuous in t.A noninteger value of k and m would lead to a differential equa-tion with a non-Lipschitz continuous source term, with possibleloss of uniqueness.
3
Mismodeling bias is remedied by deriving ever more
accurate solutions to the field equations: for binary in-
spirals, this goal is currently pursued by pushing the
PN approximation to higher orders, and by integrating
together PN and numerical-relativity results with ana-
lytical resummation and fitting techniques, such as the
effective-one-body scheme. Instrumental bias is reduced
by careful detector modeling and characterization. As-
trophysical bias is expected to be irrelevant for most
ground-based binary observations; but even if this were
not the case, astrophysical effects should present them-
selves differently (or not at all) in observations of differ-ent systems, whereas fundamental bias, if present, would
appear equally in all observed systems.
In this paper, we concentrate on the inspiral signals
from compact-binary coalescences. We consider inspirals
that are circular and adiabatic, with negligible spin ef-
fects, and neglect mismodeling bias by assuming the GW
emission is well-described by the restricted PN waveform
in the frequency-domain, stationary-phase approxima-
tion [38–41]. In GR, the resulting signals can be written
as
hGR(f) = AGR(f)eiΨGR(f) , (1)
where AGR(f) = Au−7/6 [1 + · · · ] (we neglect PN ampli-
tude corrections, symbolized with ellipses in the above
equation), u = πMf is the reduced frequency, M =
η3/5M the chirp mass, η = m1m2/M2 the symmetric
mass ratio, M = m1+m2 the total mass, and f the GW
frequency. The constant amplitude A depends on the
chirp mass, the luminosity distance, and the detector’s
antenna patterns [38–41]. The quantity ΨGR(f) in Eq.
(1) is the GW phase, given in the PN approximation by
ΨGR = 2πftc − φc −π
4
+3u−5/3
128
�1 +
7�
k=2
�ψk +
1
3ψk log(u)
�η−k/5uk/3
�,
(2)
where the constant coefficients (ψk, ψk) can be found (for
instance) in Ref. [30].
Under these assumptions, the unmodeled corrections
enumerated above can be represented by a continuous
and (in principle) predictable deformation of the GW
phase Ψ(f) and amplitude A(f). The particular defor-
mation depends on the systematic effect. For mismod-
eling, we expect corrections within the structure of the
PN series (δA ∝ f−7/6+kA/3 for the amplitude and δΨ ∝f−5/3+kφ/3 for the phase, with integers kA, kφ > 0), be-
yond the highest known perturbative order (i.e., kA > 5
for the amplitude and kφ > 7 for the phase).
For astrophysical effects, we expect corrections to arise
almost always with “negative” PN exponents [33, 36, 37,
42]. For example, an accretion disk [42], the presence of a
third body [36], and orbital eccentricity [42] all introduce
GW phase corrections δΨ ∝ f−5/3−k�φ , with integer k�φ >
0. Physically, this frequency-dependence corresponds to
astrophysical effects becoming less important for tighter
binaries, where strong-field effects become dominant.
Moving on to unmodeled corrections originating from
fundamental physics, the amplitude and phase deforma-
tions δA and δΨ can always be expressed as sums of fre-
quency powers, provided that δA and δΨ remain analyticat all frequencies sampled during the inspiral:
δA = AGR(f)K�
k=1
αkuak , δΨ(f) =
K�
k=1
βkubk , (3)
where (αk,βk, ak, bk) ∈ R for all k, and where we have
included the AGR prefactor in δA. We have neglected
possible logarithmic terms for simplicity, but they can
be included easily in the same fashion. This ppE model
introduces 4K new parameters in the waveform; the sim-
plest version of this model would allow only a single ex-
ponent:
δA = AGR(f)αua , δΨ(f) = β ub . (4)
Indeed, it can be shown that such a parametric defor-
mation is sufficiently general to model all known MG
corrections to the waveform to leading PN order [2, 3],
provided that the two tensor polarizations are dominant,
as in GR. Otherwise, a second term would be needed in
the phase and amplitude [43, 44].
Furthermore, a convincing argument can be made that
a and b should be restricted to a few discrete values [44].
Suppose that the adiabatic-inspiral waveform is derived
from an energy-balance equation with modified binding
energy and flux of the form
E = E0 v2�1 + (· · · )PN + δE vk
�, (5)
E = E0 v10
�1 + (· · · )PN + δE vm
�, (6)
where v is the relative velocity of the binary components,
ellipses stand for higher-order PN terms, and E0, E0, δEand δE are all constants that may depend on the source
parameters and on the MG coupling constants. The ex-
ponents k and m must be integers, otherwise E or Ewould not be analytic, and we would lose the guaran-
tee that the equations have a unique solution of hyper-
bolic character by the Picard–Lindelof theorem3. Fur-
thermore, we must have k ≥ −2 and m ≥ −10, otherwise
E and E would not reduce to the GR result in the weak-
field limit. These constraints lead to the deformations
δA = AGR(f)αua/3 , δΨ(f) = β ub/3 , (7)
3 Given the differential equation dy/dt = f(t, y(t)), with initialvalue y(t0) = y0, a unique solution exists for all t ∈ (t0−�, t0+�)provided that f is Lipschitz continuous in y and continuous in t.A noninteger value of k and m would lead to a differential equa-tion with a non-Lipschitz continuous source term, with possibleloss of uniqueness.

representing modified gravity as “parametrized post-Einstein,”we compare the MG SNRdetect with the SNRbias where δθth > δθstat
3
Mismodeling bias is remedied by deriving ever more
accurate solutions to the field equations: for binary in-
spirals, this goal is currently pursued by pushing the
PN approximation to higher orders, and by integrating
together PN and numerical-relativity results with ana-
lytical resummation and fitting techniques, such as the
effective-one-body scheme. Instrumental bias is reduced
by careful detector modeling and characterization. As-
trophysical bias is expected to be irrelevant for most
ground-based binary observations; but even if this were
not the case, astrophysical effects should present them-
selves differently (or not at all) in observations of differ-ent systems, whereas fundamental bias, if present, would
appear equally in all observed systems.
In this paper, we concentrate on the inspiral signals
from compact-binary coalescences. We consider inspirals
that are circular and adiabatic, with negligible spin ef-
fects, and neglect mismodeling bias by assuming the GW
emission is well-described by the restricted PN waveform
in the frequency-domain, stationary-phase approxima-
tion [38–41]. In GR, the resulting signals can be written
as
hGR(f) = AGR(f)eiΨGR(f) , (1)
where AGR(f) = Au−7/6 [1 + · · · ] (we neglect PN ampli-
tude corrections, symbolized with ellipses in the above
equation), u = πMf is the reduced frequency, M =
η3/5M the chirp mass, η = m1m2/M2 the symmetric
mass ratio, M = m1+m2 the total mass, and f the GW
frequency. The constant amplitude A depends on the
chirp mass, the luminosity distance, and the detector’s
antenna patterns [38–41]. The quantity ΨGR(f) in Eq.
(1) is the GW phase, given in the PN approximation by
ΨGR = 2πftc − φc −π
4
+3u−5/3
128
�1 +
7�
k=2
�ψk +
1
3ψk log(u)
�η−k/5uk/3
�,
(2)
where the constant coefficients (ψk, ψk) can be found (for
instance) in Ref. [30].
Under these assumptions, the unmodeled corrections
enumerated above can be represented by a continuous
and (in principle) predictable deformation of the GW
phase Ψ(f) and amplitude A(f). The particular defor-
mation depends on the systematic effect. For mismod-
eling, we expect corrections within the structure of the
PN series (δA ∝ f−7/6+kA/3 for the amplitude and δΨ ∝f−5/3+kφ/3 for the phase, with integers kA, kφ > 0), be-
yond the highest known perturbative order (i.e., kA > 5
for the amplitude and kφ > 7 for the phase).
For astrophysical effects, we expect corrections to arise
almost always with “negative” PN exponents [33, 36, 37,
42]. For example, an accretion disk [42], the presence of a
third body [36], and orbital eccentricity [42] all introduce
GW phase corrections δΨ ∝ f−5/3−k�φ , with integer k�φ >
0. Physically, this frequency-dependence corresponds to
astrophysical effects becoming less important for tighter
binaries, where strong-field effects become dominant.
Moving on to unmodeled corrections originating from
fundamental physics, the amplitude and phase deforma-
tions δA and δΨ can always be expressed as sums of fre-
quency powers, provided that δA and δΨ remain analyticat all frequencies sampled during the inspiral:
δA = AGR(f)K�
k=1
αkuak , δΨ(f) =
K�
k=1
βkubk , (3)
where (αk,βk, ak, bk) ∈ R for all k, and where we have
included the AGR prefactor in δA. We have neglected
possible logarithmic terms for simplicity, but they can
be included easily in the same fashion. This ppE model
introduces 4K new parameters in the waveform; the sim-
plest version of this model would allow only a single ex-
ponent:
δA = AGR(f)αua , δΨ(f) = β ub . (4)
Indeed, it can be shown that such a parametric defor-
mation is sufficiently general to model all known MG
corrections to the waveform to leading PN order [2, 3],
provided that the two tensor polarizations are dominant,
as in GR. Otherwise, a second term would be needed in
the phase and amplitude [43, 44].
Furthermore, a convincing argument can be made that
a and b should be restricted to a few discrete values [44].
Suppose that the adiabatic-inspiral waveform is derived
from an energy-balance equation with modified binding
energy and flux of the form
E = E0 v2�1 + (· · · )PN + δE vk
�, (5)
E = E0 v10
�1 + (· · · )PN + δE vm
�, (6)
where v is the relative velocity of the binary components,
ellipses stand for higher-order PN terms, and E0, E0, δEand δE are all constants that may depend on the source
parameters and on the MG coupling constants. The ex-
ponents k and m must be integers, otherwise E or Ewould not be analytic, and we would lose the guaran-
tee that the equations have a unique solution of hyper-
bolic character by the Picard–Lindelof theorem3. Fur-
thermore, we must have k ≥ −2 and m ≥ −10, otherwise
E and E would not reduce to the GR result in the weak-
field limit. These constraints lead to the deformations
δA = AGR(f)αua/3 , δΨ(f) = β ub/3 , (7)
3 Given the differential equation dy/dt = f(t, y(t)), with initialvalue y(t0) = y0, a unique solution exists for all t ∈ (t0−�, t0+�)provided that f is Lipschitz continuous in y and continuous in t.A noninteger value of k and m would lead to a differential equa-tion with a non-Lipschitz continuous source term, with possibleloss of uniqueness.
3
Mismodeling bias is remedied by deriving ever more
accurate solutions to the field equations: for binary in-
spirals, this goal is currently pursued by pushing the
PN approximation to higher orders, and by integrating
together PN and numerical-relativity results with ana-
lytical resummation and fitting techniques, such as the
effective-one-body scheme. Instrumental bias is reduced
by careful detector modeling and characterization. As-
trophysical bias is expected to be irrelevant for most
ground-based binary observations; but even if this were
not the case, astrophysical effects should present them-
selves differently (or not at all) in observations of differ-ent systems, whereas fundamental bias, if present, would
appear equally in all observed systems.
In this paper, we concentrate on the inspiral signals
from compact-binary coalescences. We consider inspirals
that are circular and adiabatic, with negligible spin ef-
fects, and neglect mismodeling bias by assuming the GW
emission is well-described by the restricted PN waveform
in the frequency-domain, stationary-phase approxima-
tion [38–41]. In GR, the resulting signals can be written
as
hGR(f) = AGR(f)eiΨGR(f) , (1)
where AGR(f) = Au−7/6 [1 + · · · ] (we neglect PN ampli-
tude corrections, symbolized with ellipses in the above
equation), u = πMf is the reduced frequency, M =
η3/5M the chirp mass, η = m1m2/M2 the symmetric
mass ratio, M = m1+m2 the total mass, and f the GW
frequency. The constant amplitude A depends on the
chirp mass, the luminosity distance, and the detector’s
antenna patterns [38–41]. The quantity ΨGR(f) in Eq.
(1) is the GW phase, given in the PN approximation by
ΨGR = 2πftc − φc −π
4
+3u−5/3
128
�1 +
7�
k=2
�ψk +
1
3ψk log(u)
�η−k/5uk/3
�,
(2)
where the constant coefficients (ψk, ψk) can be found (for
instance) in Ref. [30].
Under these assumptions, the unmodeled corrections
enumerated above can be represented by a continuous
and (in principle) predictable deformation of the GW
phase Ψ(f) and amplitude A(f). The particular defor-
mation depends on the systematic effect. For mismod-
eling, we expect corrections within the structure of the
PN series (δA ∝ f−7/6+kA/3 for the amplitude and δΨ ∝f−5/3+kφ/3 for the phase, with integers kA, kφ > 0), be-
yond the highest known perturbative order (i.e., kA > 5
for the amplitude and kφ > 7 for the phase).
For astrophysical effects, we expect corrections to arise
almost always with “negative” PN exponents [33, 36, 37,
42]. For example, an accretion disk [42], the presence of a
third body [36], and orbital eccentricity [42] all introduce
GW phase corrections δΨ ∝ f−5/3−k�φ , with integer k�φ >
0. Physically, this frequency-dependence corresponds to
astrophysical effects becoming less important for tighter
binaries, where strong-field effects become dominant.
Moving on to unmodeled corrections originating from
fundamental physics, the amplitude and phase deforma-
tions δA and δΨ can always be expressed as sums of fre-
quency powers, provided that δA and δΨ remain analyticat all frequencies sampled during the inspiral:
δA = AGR(f)K�
k=1
αkuak , δΨ(f) =
K�
k=1
βkubk , (3)
where (αk,βk, ak, bk) ∈ R for all k, and where we have
included the AGR prefactor in δA. We have neglected
possible logarithmic terms for simplicity, but they can
be included easily in the same fashion. This ppE model
introduces 4K new parameters in the waveform; the sim-
plest version of this model would allow only a single ex-
ponent:
δA = AGR(f)αua , δΨ(f) = β ub . (4)
Indeed, it can be shown that such a parametric defor-
mation is sufficiently general to model all known MG
corrections to the waveform to leading PN order [2, 3],
provided that the two tensor polarizations are dominant,
as in GR. Otherwise, a second term would be needed in
the phase and amplitude [43, 44].
Furthermore, a convincing argument can be made that
a and b should be restricted to a few discrete values [44].
Suppose that the adiabatic-inspiral waveform is derived
from an energy-balance equation with modified binding
energy and flux of the form
E = E0 v2�1 + (· · · )PN + δE vk
�, (5)
E = E0 v10
�1 + (· · · )PN + δE vm
�, (6)
where v is the relative velocity of the binary components,
ellipses stand for higher-order PN terms, and E0, E0, δEand δE are all constants that may depend on the source
parameters and on the MG coupling constants. The ex-
ponents k and m must be integers, otherwise E or Ewould not be analytic, and we would lose the guaran-
tee that the equations have a unique solution of hyper-
bolic character by the Picard–Lindelof theorem3. Fur-
thermore, we must have k ≥ −2 and m ≥ −10, otherwise
E and E would not reduce to the GR result in the weak-
field limit. These constraints lead to the deformations
δA = AGR(f)αua/3 , δΨ(f) = β ub/3 , (7)
3 Given the differential equation dy/dt = f(t, y(t)), with initialvalue y(t0) = y0, a unique solution exists for all t ∈ (t0−�, t0+�)provided that f is Lipschitz continuous in y and continuous in t.A noninteger value of k and m would lead to a differential equa-tion with a non-Lipschitz continuous source term, with possibleloss of uniqueness.
6
in approximating h(�θtr + δ�θstat) − h(�θtr) as h,αδθαstat besufficiently small (0.1 in norm) on most (95%) of the 1–σerror surface described by (F−1)αβ . For the theoreticalerrors, we require that the FFs computed in the two waysdescribed below Eq. (13) be consistent to 1%.
III. ANALYSIS AND RESULTS
We examine three representative binary GW sourcesfor second-generation interferometric detectors such asAdvanced LIGO [50]: neutron-star–neutron-star bina-ries with (1.4+1.4)M⊙ component masses; neutron-star–black-hole binaries with (1.4 + 5)M⊙ masses; and black-hole–black-hole binaries with (5 + 10)M⊙ masses.
We concentrate on the inspiral phase of coalescence,which we model as quadrupolar and adiabatically quasi-circular with 3.5PN-accurate phasing. We truncate thewaves at the innermost stable circular orbit of a point-particle in a Schwarzschild background (assuming GR),and we neglect spin effects and PN amplitude corrections.The resulting waveforms are described by nine parame-ters: the two masses (or the chirp and reduced masses),the time and inspiral phase at coalescence, two sky-position angles, two angles that describe the binary incli-nation and GW polarization, and the luminosity distance(see [30] and [3] for a similar waveform prescription).We assume a simultaneous detection by three second-generation detectors with the LIGO Hanford, LIGO Liv-ingston, and Virgo geometries and relative delays [51],and with identical broadband-configuration power spec-tral densities, as given by Eq. (10) of [3]. Furthermore,we assume that GW-detector noise is Gaussian and sta-tionary, as required by the Cutler–Vallisneri [30] and Val-lisneri [31] formalisms.
For these systems, we consider ppE phasing correctionsδΨ as described in Sec. II A, and we compare SNRbias
and SNRdetect as a function of the MG-correction mag-nitude β for a range of exponents b. For each mass com-bination, each b, and each β, we randomly select 1,000configurations of the phase and angle parameters fromthe appropriate uniform distributions (e.g., sky positionsare chosen randomly on the celestial sphere). The lumi-nosity distance is reabsorbed in the SNR scaling, whilethe time of coalescence has no effect on our computa-tion. For each configuration we compute SNRdetect andSNRbias, and we report their median values. The con-dition maxα δθαth/δθ
αstat = 1 that yields the latter is al-
most invariably satisfied first for the chirp-mass parame-ter. Statistical fluctuations around the median turn outto be rather small (a few percent).
The δ�θstat consistency check is satisfied for detectionSNRs ranging from 10 to 100, typically ∼ 50, but ourresults for lower SNRs should be at least representativeof trends. The δ�θth check is satisfied for a maximum βthat depends on b, and which sets the largest β that weinvestigate. By contrast, the smallest β that we studycorresponds to min(SNRdetect, SNRbias) = 100, a rela-
!"#!"
!"#$%
$%#$%
"!&'()(*)"!&+,-.
FIG. 1. SNRdetect
(solid curves) and SNRbias
(dashed
curves) as a function of β for b = −7,−6,−5,−4,−3,−2,−1, 1and 2 (left to right), for a NS–NS system with (m1,m2) =
(1.4, 1.4)M⊙ (top), a NS–BH system with (m1,m2) =
(1.4, 5)M⊙ (mid) and a BH–BH system (bottom) with
(m1,m2) = (5, 10)M⊙. The symbols in the top plot are de-
scribed in the main text.
tively large detection SNR that would be achieved veryrarely in volume-limited searches [52].Figure 1 presents the main results of this paper, with
the solid curves plotting SNRdetect (once again, the detec-tion SNR above which MG can be detected positively),and the dashed curves plotting SNRbias (the SNR abovewhich the largest ratio of fundamental error to statisticalerror reaches one). Both sets of curves are plotted as afunction of the MG-correction magnitude β; the curves ineach set correspond to b = −7,−5,−4,−3,−2,−1, 1, and2, from left to right as labeled. The top, mid, and bottompanels report results for our (1.4+1.4)M⊙, (1.4+5)M⊙,and (5 + 10)M⊙ systems, respectively.
This figure reveals a few interesting features. First,for the same detection SNR, more massive systems re-quire larger β before MG can be detected. This musthappen because the larger the mass, the fewer the num-ber of useful GW cycles in the detector’s band, so thesignals become relatively featureless, and higher FFs can

representing modified gravity as “parametrized post-Einstein,”we compare the MG SNRdetect with the SNRbias where δθth > δθstat
3
Mismodeling bias is remedied by deriving ever more
accurate solutions to the field equations: for binary in-
spirals, this goal is currently pursued by pushing the
PN approximation to higher orders, and by integrating
together PN and numerical-relativity results with ana-
lytical resummation and fitting techniques, such as the
effective-one-body scheme. Instrumental bias is reduced
by careful detector modeling and characterization. As-
trophysical bias is expected to be irrelevant for most
ground-based binary observations; but even if this were
not the case, astrophysical effects should present them-
selves differently (or not at all) in observations of differ-ent systems, whereas fundamental bias, if present, would
appear equally in all observed systems.
In this paper, we concentrate on the inspiral signals
from compact-binary coalescences. We consider inspirals
that are circular and adiabatic, with negligible spin ef-
fects, and neglect mismodeling bias by assuming the GW
emission is well-described by the restricted PN waveform
in the frequency-domain, stationary-phase approxima-
tion [38–41]. In GR, the resulting signals can be written
as
hGR(f) = AGR(f)eiΨGR(f) , (1)
where AGR(f) = Au−7/6 [1 + · · · ] (we neglect PN ampli-
tude corrections, symbolized with ellipses in the above
equation), u = πMf is the reduced frequency, M =
η3/5M the chirp mass, η = m1m2/M2 the symmetric
mass ratio, M = m1+m2 the total mass, and f the GW
frequency. The constant amplitude A depends on the
chirp mass, the luminosity distance, and the detector’s
antenna patterns [38–41]. The quantity ΨGR(f) in Eq.
(1) is the GW phase, given in the PN approximation by
ΨGR = 2πftc − φc −π
4
+3u−5/3
128
�1 +
7�
k=2
�ψk +
1
3ψk log(u)
�η−k/5uk/3
�,
(2)
where the constant coefficients (ψk, ψk) can be found (for
instance) in Ref. [30].
Under these assumptions, the unmodeled corrections
enumerated above can be represented by a continuous
and (in principle) predictable deformation of the GW
phase Ψ(f) and amplitude A(f). The particular defor-
mation depends on the systematic effect. For mismod-
eling, we expect corrections within the structure of the
PN series (δA ∝ f−7/6+kA/3 for the amplitude and δΨ ∝f−5/3+kφ/3 for the phase, with integers kA, kφ > 0), be-
yond the highest known perturbative order (i.e., kA > 5
for the amplitude and kφ > 7 for the phase).
For astrophysical effects, we expect corrections to arise
almost always with “negative” PN exponents [33, 36, 37,
42]. For example, an accretion disk [42], the presence of a
third body [36], and orbital eccentricity [42] all introduce
GW phase corrections δΨ ∝ f−5/3−k�φ , with integer k�φ >
0. Physically, this frequency-dependence corresponds to
astrophysical effects becoming less important for tighter
binaries, where strong-field effects become dominant.
Moving on to unmodeled corrections originating from
fundamental physics, the amplitude and phase deforma-
tions δA and δΨ can always be expressed as sums of fre-
quency powers, provided that δA and δΨ remain analyticat all frequencies sampled during the inspiral:
δA = AGR(f)K�
k=1
αkuak , δΨ(f) =
K�
k=1
βkubk , (3)
where (αk,βk, ak, bk) ∈ R for all k, and where we have
included the AGR prefactor in δA. We have neglected
possible logarithmic terms for simplicity, but they can
be included easily in the same fashion. This ppE model
introduces 4K new parameters in the waveform; the sim-
plest version of this model would allow only a single ex-
ponent:
δA = AGR(f)αua , δΨ(f) = β ub . (4)
Indeed, it can be shown that such a parametric defor-
mation is sufficiently general to model all known MG
corrections to the waveform to leading PN order [2, 3],
provided that the two tensor polarizations are dominant,
as in GR. Otherwise, a second term would be needed in
the phase and amplitude [43, 44].
Furthermore, a convincing argument can be made that
a and b should be restricted to a few discrete values [44].
Suppose that the adiabatic-inspiral waveform is derived
from an energy-balance equation with modified binding
energy and flux of the form
E = E0 v2�1 + (· · · )PN + δE vk
�, (5)
E = E0 v10
�1 + (· · · )PN + δE vm
�, (6)
where v is the relative velocity of the binary components,
ellipses stand for higher-order PN terms, and E0, E0, δEand δE are all constants that may depend on the source
parameters and on the MG coupling constants. The ex-
ponents k and m must be integers, otherwise E or Ewould not be analytic, and we would lose the guaran-
tee that the equations have a unique solution of hyper-
bolic character by the Picard–Lindelof theorem3. Fur-
thermore, we must have k ≥ −2 and m ≥ −10, otherwise
E and E would not reduce to the GR result in the weak-
field limit. These constraints lead to the deformations
δA = AGR(f)αua/3 , δΨ(f) = β ub/3 , (7)
3 Given the differential equation dy/dt = f(t, y(t)), with initialvalue y(t0) = y0, a unique solution exists for all t ∈ (t0−�, t0+�)provided that f is Lipschitz continuous in y and continuous in t.A noninteger value of k and m would lead to a differential equa-tion with a non-Lipschitz continuous source term, with possibleloss of uniqueness.
3
Mismodeling bias is remedied by deriving ever more
accurate solutions to the field equations: for binary in-
spirals, this goal is currently pursued by pushing the
PN approximation to higher orders, and by integrating
together PN and numerical-relativity results with ana-
lytical resummation and fitting techniques, such as the
effective-one-body scheme. Instrumental bias is reduced
by careful detector modeling and characterization. As-
trophysical bias is expected to be irrelevant for most
ground-based binary observations; but even if this were
not the case, astrophysical effects should present them-
selves differently (or not at all) in observations of differ-ent systems, whereas fundamental bias, if present, would
appear equally in all observed systems.
In this paper, we concentrate on the inspiral signals
from compact-binary coalescences. We consider inspirals
that are circular and adiabatic, with negligible spin ef-
fects, and neglect mismodeling bias by assuming the GW
emission is well-described by the restricted PN waveform
in the frequency-domain, stationary-phase approxima-
tion [38–41]. In GR, the resulting signals can be written
as
hGR(f) = AGR(f)eiΨGR(f) , (1)
where AGR(f) = Au−7/6 [1 + · · · ] (we neglect PN ampli-
tude corrections, symbolized with ellipses in the above
equation), u = πMf is the reduced frequency, M =
η3/5M the chirp mass, η = m1m2/M2 the symmetric
mass ratio, M = m1+m2 the total mass, and f the GW
frequency. The constant amplitude A depends on the
chirp mass, the luminosity distance, and the detector’s
antenna patterns [38–41]. The quantity ΨGR(f) in Eq.
(1) is the GW phase, given in the PN approximation by
ΨGR = 2πftc − φc −π
4
+3u−5/3
128
�1 +
7�
k=2
�ψk +
1
3ψk log(u)
�η−k/5uk/3
�,
(2)
where the constant coefficients (ψk, ψk) can be found (for
instance) in Ref. [30].
Under these assumptions, the unmodeled corrections
enumerated above can be represented by a continuous
and (in principle) predictable deformation of the GW
phase Ψ(f) and amplitude A(f). The particular defor-
mation depends on the systematic effect. For mismod-
eling, we expect corrections within the structure of the
PN series (δA ∝ f−7/6+kA/3 for the amplitude and δΨ ∝f−5/3+kφ/3 for the phase, with integers kA, kφ > 0), be-
yond the highest known perturbative order (i.e., kA > 5
for the amplitude and kφ > 7 for the phase).
For astrophysical effects, we expect corrections to arise
almost always with “negative” PN exponents [33, 36, 37,
42]. For example, an accretion disk [42], the presence of a
third body [36], and orbital eccentricity [42] all introduce
GW phase corrections δΨ ∝ f−5/3−k�φ , with integer k�φ >
0. Physically, this frequency-dependence corresponds to
astrophysical effects becoming less important for tighter
binaries, where strong-field effects become dominant.
Moving on to unmodeled corrections originating from
fundamental physics, the amplitude and phase deforma-
tions δA and δΨ can always be expressed as sums of fre-
quency powers, provided that δA and δΨ remain analyticat all frequencies sampled during the inspiral:
δA = AGR(f)K�
k=1
αkuak , δΨ(f) =
K�
k=1
βkubk , (3)
where (αk,βk, ak, bk) ∈ R for all k, and where we have
included the AGR prefactor in δA. We have neglected
possible logarithmic terms for simplicity, but they can
be included easily in the same fashion. This ppE model
introduces 4K new parameters in the waveform; the sim-
plest version of this model would allow only a single ex-
ponent:
δA = AGR(f)αua , δΨ(f) = β ub . (4)
Indeed, it can be shown that such a parametric defor-
mation is sufficiently general to model all known MG
corrections to the waveform to leading PN order [2, 3],
provided that the two tensor polarizations are dominant,
as in GR. Otherwise, a second term would be needed in
the phase and amplitude [43, 44].
Furthermore, a convincing argument can be made that
a and b should be restricted to a few discrete values [44].
Suppose that the adiabatic-inspiral waveform is derived
from an energy-balance equation with modified binding
energy and flux of the form
E = E0 v2�1 + (· · · )PN + δE vk
�, (5)
E = E0 v10
�1 + (· · · )PN + δE vm
�, (6)
where v is the relative velocity of the binary components,
ellipses stand for higher-order PN terms, and E0, E0, δEand δE are all constants that may depend on the source
parameters and on the MG coupling constants. The ex-
ponents k and m must be integers, otherwise E or Ewould not be analytic, and we would lose the guaran-
tee that the equations have a unique solution of hyper-
bolic character by the Picard–Lindelof theorem3. Fur-
thermore, we must have k ≥ −2 and m ≥ −10, otherwise
E and E would not reduce to the GR result in the weak-
field limit. These constraints lead to the deformations
δA = AGR(f)αua/3 , δΨ(f) = β ub/3 , (7)
3 Given the differential equation dy/dt = f(t, y(t)), with initialvalue y(t0) = y0, a unique solution exists for all t ∈ (t0−�, t0+�)provided that f is Lipschitz continuous in y and continuous in t.A noninteger value of k and m would lead to a differential equa-tion with a non-Lipschitz continuous source term, with possibleloss of uniqueness.
6
in approximating h(�θtr + δ�θstat) − h(�θtr) as h,αδθαstat besufficiently small (0.1 in norm) on most (95%) of the 1–σerror surface described by (F−1)αβ . For the theoreticalerrors, we require that the FFs computed in the two waysdescribed below Eq. (13) be consistent to 1%.
III. ANALYSIS AND RESULTS
We examine three representative binary GW sourcesfor second-generation interferometric detectors such asAdvanced LIGO [50]: neutron-star–neutron-star bina-ries with (1.4+1.4)M⊙ component masses; neutron-star–black-hole binaries with (1.4 + 5)M⊙ masses; and black-hole–black-hole binaries with (5 + 10)M⊙ masses.
We concentrate on the inspiral phase of coalescence,which we model as quadrupolar and adiabatically quasi-circular with 3.5PN-accurate phasing. We truncate thewaves at the innermost stable circular orbit of a point-particle in a Schwarzschild background (assuming GR),and we neglect spin effects and PN amplitude corrections.The resulting waveforms are described by nine parame-ters: the two masses (or the chirp and reduced masses),the time and inspiral phase at coalescence, two sky-position angles, two angles that describe the binary incli-nation and GW polarization, and the luminosity distance(see [30] and [3] for a similar waveform prescription).We assume a simultaneous detection by three second-generation detectors with the LIGO Hanford, LIGO Liv-ingston, and Virgo geometries and relative delays [51],and with identical broadband-configuration power spec-tral densities, as given by Eq. (10) of [3]. Furthermore,we assume that GW-detector noise is Gaussian and sta-tionary, as required by the Cutler–Vallisneri [30] and Val-lisneri [31] formalisms.
For these systems, we consider ppE phasing correctionsδΨ as described in Sec. II A, and we compare SNRbias
and SNRdetect as a function of the MG-correction mag-nitude β for a range of exponents b. For each mass com-bination, each b, and each β, we randomly select 1,000configurations of the phase and angle parameters fromthe appropriate uniform distributions (e.g., sky positionsare chosen randomly on the celestial sphere). The lumi-nosity distance is reabsorbed in the SNR scaling, whilethe time of coalescence has no effect on our computa-tion. For each configuration we compute SNRdetect andSNRbias, and we report their median values. The con-dition maxα δθαth/δθ
αstat = 1 that yields the latter is al-
most invariably satisfied first for the chirp-mass parame-ter. Statistical fluctuations around the median turn outto be rather small (a few percent).
The δ�θstat consistency check is satisfied for detectionSNRs ranging from 10 to 100, typically ∼ 50, but ourresults for lower SNRs should be at least representativeof trends. The δ�θth check is satisfied for a maximum βthat depends on b, and which sets the largest β that weinvestigate. By contrast, the smallest β that we studycorresponds to min(SNRdetect, SNRbias) = 100, a rela-
!"#!"
!"#$%
$%#$%
"!&'()(*)"!&+,-.
FIG. 1. SNRdetect
(solid curves) and SNRbias
(dashed
curves) as a function of β for b = −7,−6,−5,−4,−3,−2,−1, 1and 2 (left to right), for a NS–NS system with (m1,m2) =
(1.4, 1.4)M⊙ (top), a NS–BH system with (m1,m2) =
(1.4, 5)M⊙ (mid) and a BH–BH system (bottom) with
(m1,m2) = (5, 10)M⊙. The symbols in the top plot are de-
scribed in the main text.
tively large detection SNR that would be achieved veryrarely in volume-limited searches [52].Figure 1 presents the main results of this paper, with
the solid curves plotting SNRdetect (once again, the detec-tion SNR above which MG can be detected positively),and the dashed curves plotting SNRbias (the SNR abovewhich the largest ratio of fundamental error to statisticalerror reaches one). Both sets of curves are plotted as afunction of the MG-correction magnitude β; the curves ineach set correspond to b = −7,−5,−4,−3,−2,−1, 1, and2, from left to right as labeled. The top, mid, and bottompanels report results for our (1.4+1.4)M⊙, (1.4+5)M⊙,and (5 + 10)M⊙ systems, respectively.
This figure reveals a few interesting features. First,for the same detection SNR, more massive systems re-quire larger β before MG can be detected. This musthappen because the larger the mass, the fewer the num-ber of useful GW cycles in the detector’s band, so thesignals become relatively featureless, and higher FFs can
at least for simple circular inspirals, stealth bias (significant δθth, non-detectable MG) is generic![but see arXiv/1301.2627]

the Mock LISA Data Challenges: successfully fosteringand consolidating collaborative data-analysis development
• five challenges completed between 2006 and 2011
• 70 participants, 25 institutions 30+ publications
• demonstrated the detection and parameter estimation of all major LF GW source classes, using a great variety of methods
• lisatools.googlecode.comlisasolve.googlecode.com
• acknowledged model for LISA Pathfinder and the International Pulsar-Timing Array