ManuelD. Ortigueira,AntónioM.Lopes andJoséTenreiroMachado … · 2021. 1. 4. · 2 M. D....
12
IJNSNS 2019; aop Manuel D. Ortigueira, António M. Lopes ∗ and José Tenreiro Machado On the Numerical Computation of the Mittag–Leffler Function https://doi.org/10.1515/ijnsns-2018-0358 Received November 22, 2018; accepted June 07, 2019 Abstract: The Mittag–Leffler function (MLF) plays an important role in many applications of fractional calcu- lus, establishing a connection between exponential and power law behaviors that characterize integer and frac- tional order phenomena, respectively. Nevertheless, the numerical computation of the MLF poses problems both of accuracy and convergence. In this paper, we study the cal- culation of the 2-parameter MLF by using polynomial com- putation and integral formulas. For the particular cases having Laplace transform (LT) the method relies on the inversion of the LT using the fast Fourier transform. Exper- iments with two other available methods compare also the computational time and accuracy. The 3-parameter MLF and its calculation are also considered. Keywords: Mittag–Leffler function, numerical computa- tion, fast Fourier transform MSC ® (2010). Primary 26A33; Secondary 65R10 1 Introduction The Mittag–Leffler function (MLF) [1–4] is ubiquitous both in the theory of fractional calculus (FC) and its applica- tions [5–16]. In fact, the impulse response of fractional lin- ear systems can be expressed in terms of the MLF, which entails the need of efficient algorithms for its computa- tion [17]. However, this calculation is not trivial, excepting when considering small values of the argument, since the numerical computation of the MLF poses problems both of accuracy and convergence [1, 3, 18–21]. *Corresponding author: António M. Lopes, Faculty of Engineering, University of Porto, Rua Dr. Roberto Frias, Porto 4200–465, Portugal, E-mail: [email protected] Manuel D. Ortigueira, Center for Technology and Systems – UNINOVA and DEE, NOVA School of Science and Technology of NOVA University of Lisbon, Portugal, E-mail: [email protected] José Tenreiro Machado, Dept. of Electrical Engineering, Institute of Engineering, Polytechnic of Porto, Rua Dr. Antonio Bernardino de Almeida, 431, Porto 4249-015, Portugal, E-mail: [email protected] http://orcid.org/0000-0003-4274-4879 In this paper, we tackle this problem. We start from the general integral formula for the 2-parameter MLF [1, 22, 23] and we develop a method for its numerical imple- mentation. We then particularize the general formulation for values on half-straight lines, which are useful in its application to linear systems. In a second step, we intro- duce a generalization of the MLF and we propose one method based on the efficient computation of the inverse Laplace transform (LT). We adopt the bilinear transform- ation to follow a Z transform form and we use the fast Fourier transform (FFT) to obtain a sampled version of the generalized Mittag–Leffler fuction (GMLF). Finally, based on these ideas, we consider also the implementation of the 3-parameter GMLF. The paper is organized as follows. Section 2 intro- duces the 1- and 2-parameter MLF and their integral rep- resentations. Section 3 addresses distinct methods for computing the MLF, presents several numerical tests, and discusses the main results. Section 4 generalizes the algorithms to the 3-parameters MLF. Finally, Section 5 draws the mains conclusions. 2 The MLF and its integral representation Definition 1. The (1-parameter) MLF [6] is given by: E ! (z)= ∞ k=0 z k A(k! + 1) , z ∈ C, ! ∈ R + . (1) The exponential series is a particular case obtained when ! = 1. A generalization of (1) includes a second parameter, yielding the 2-parameter MLF: E !," (z)= ∞ k=0 z k A(k! + ") , z ∈ C, !, " ∈ R + . (2) When ! and " are positive real (case that we will consider here), the series converges for all values of z ∈ C [1, 22, 23] and has the integral representation that we will deduce here. Authenticated | [email protected] author's copy Download Date | 7/13/19 9:07 AM
Transcript of ManuelD. Ortigueira,AntónioM.Lopes andJoséTenreiroMachado … · 2021. 1. 4. · 2 M. D....

IJNSNS 2019; aop
Manuel D. Ortigueira, António M. Lopes∗ and José Tenreiro Machado
On the Numerical Computation of theMittag–Leffler Functionhttps://doi.org/10.1515/ijnsns-2018-0358Received November 22, 2018; accepted June 07, 2019
Abstract: The Mittag–Leffler function (MLF) plays animportant role in many applications of fractional calcu-lus, establishing a connection between exponential andpower law behaviors that characterize integer and frac-tional order phenomena, respectively. Nevertheless, thenumerical computation of theMLF poses problems both ofaccuracy and convergence. In this paper, we study the cal-culation of the 2-parameterMLF by using polynomial com-putation and integral formulas. For the particular caseshaving Laplace transform (LT) the method relies on theinversion of the LT using the fast Fourier transform. Exper-iments with two other availablemethods compare also thecomputational time and accuracy. The 3-parameter MLFand its calculation are also considered.
Keywords: Mittag–Leffler function, numerical computa-tion, fast Fourier transform
MSC® (2010). Primary 26A33; Secondary 65R10
1 IntroductionTheMittag–Leffler function (MLF) [1–4] is ubiquitous bothin the theory of fractional calculus (FC) and its applica-tions [5–16]. In fact, the impulse response of fractional lin-ear systems can be expressed in terms of the MLF, whichentails the need of efficient algorithms for its computa-tion [17]. However, this calculation is not trivial, exceptingwhen considering small values of the argument, since thenumerical computation of the MLF poses problems bothof accuracy and convergence [1, 3, 18–21].
*Corresponding author: António M. Lopes, Faculty of Engineering,University of Porto, Rua Dr. Roberto Frias, Porto 4200–465,Portugal, E-mail: [email protected] D. Ortigueira, Center for Technology and Systems –UNINOVA and DEE, NOVA School of Science and Technology of NOVAUniversity of Lisbon, Portugal, E-mail: [email protected]é Tenreiro Machado, Dept. of Electrical Engineering, Institute ofEngineering, Polytechnic of Porto, Rua Dr. Antonio Bernardino deAlmeida, 431, Porto 4249-015, Portugal, E-mail: [email protected]://orcid.org/0000-0003-4274-4879
In this paper, we tackle this problem. We start fromthe general integral formula for the 2-parameter MLF [1,22, 23] and we develop a method for its numerical imple-mentation. We then particularize the general formulationfor values on half-straight lines, which are useful in itsapplication to linear systems. In a second step, we intro-duce a generalization of the MLF and we propose onemethod based on the efficient computation of the inverseLaplace transform (LT). We adopt the bilinear transform-ation to follow a Z transform form and we use the fastFourier transform (FFT) to obtain a sampled version of thegeneralized Mittag–Leffler fuction (GMLF). Finally, basedon these ideas, we consider also the implementation of the3-parameter GMLF.
The paper is organized as follows. Section 2 intro-duces the 1- and 2-parameter MLF and their integral rep-resentations. Section 3 addresses distinct methods forcomputing the MLF, presents several numerical tests,and discusses the main results. Section 4 generalizes thealgorithms to the 3-parameters MLF. Finally, Section 5draws the mains conclusions.
2 The MLF and its integralrepresentation
Definition 1. The (1-parameter) MLF [6] is given by:
E!(z) =∞∑k=0
zk
A(k! + 1) , z ∈ C, ! ∈ R+. (1)
The exponential series is a particular case obtained when! = 1.
A generalization of (1) includes a second parameter,yielding the 2-parameter MLF:
E!,"(z) =∞∑k=0
zk
A(k! + ") , z ∈ C, !, " ∈ R+. (2)
When ! and " are positive real (case that we will considerhere), the series converges for all values of z ∈ C [1, 22, 23]and has the integral representation that we will deducehere.
Authenticated | [email protected] author's copyDownload Date | 7/13/19 9:07 AM

2 M. D. Ortigueira et al.: On the Numerical Computation
Re
Im
L
ϕ
r
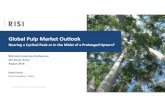
Figure 1: The Integration path, L, for 1A(z) .
Consider the integration path in Figure 1. As shown byHankel [24], the reciprocal gamma function can be com-puted by the integral
1A(z) =
120i
∫L
u–zeudu, z ∈ C, (3)
provided that:– u–z is defined by its principal branch; we can assume
for branchcut line the negative real half axis, unless apole exists on this line;
– rmay assume any positive real value;– > can be any value in the interval (0/2,0); it can be
equal to 0, provided that arg(u) = 0, or arg(u) = –0,above, or below, the cut, respectively.
As the MLF is defined by a uniformly convergent series,we can write
E!,"(z) =120i
∞∑k=0
zk∫L
u–k!–"eudu
=120i
∫L
u–"[∞∑k=0
(zu–!)k]eudu.
The summation of the inner geometric series is∑∞
k=0(zu–!)k = u!u!–z , provided that |zu–!| < 1. This
condition introduces a constraint in the integration loopin such a way that we can formulate the general integralform of the MLF, [1, 19, 22, 25]:
E!,"(z) =120i
∫L
u!–"eu
u! – zdu, z ∈ C, !, " ∈ R
+, (4)
where now L is the integration path consisting in a loopthat starts at u = –∞, encircles the disk with center u = 0and radius |z|1/!, and returns to u = –∞ (in Figure 1, r >|z|1/!). This integration path can be deformed to becomethe Hankel contour, simplifying the computations, underthe assumptions:– The negative real axis is the branchcut line, but we
can choose any other in the left half plane; as referredabove, we have to follow that strategy if there is a poleon such axis;
– As the MLF of any order ! > 1 can be written in termsof the MLF with order ! < 1, we will consider 0 <! ≤ 1;
– We address the cases ! – " – 1 > 0. Other alternatives[1], namely ! < 0, can also be treated, but they are notrelevant, and are not considered;
– z ∈ C ∖ 0.
Consider the integration path in Figure 2 denoted by Lt. Itconsists of three components:– The above described path L;– The Hankel pathH consisting of two half-straight lines
joined by a half circle with a radius as small as wewish;
– Two circular arcs with radius R > |z|1/!, to make aclosed path; radius R grows to∞.
With the residue theorem, we can write
∮Lt
u!–"eu
u! – zdu =
⎧⎨⎩
20i! z
1–"! ez
1! | arg(z)| ≤ 0!
0 | arg(z)| > 0!. (5)
Authenticated | [email protected] author's copyDownload Date | 7/13/19 9:07 AM

M. D. Ortigueira et al.: On the Numerical Computation 3
Re
Im
LH
R
Figure 2: The paths L andH, and the closing arcs.
Under the above stated conditions, we can deduce that:– The integrals along the circular arcs tend to zero when
the radius goes to infinite (application of the Jordan’slemma);
– The integral along the half-circle in the Hankel pathbecomes zero when its radius decrease to zero;
– The integral along the upper half-straight line is∫∞
0+u!–"ei(!–")0u!ei!0–z e–udu;
– The integral over the lower half-straight line is–
∫∞
0+u!–"e–i(!–")0u!e–i!0–z e–udu;
– The MLF is given by
E!,"(z) = z1–"!ez
1!
! +
10
∫∞
0+
sin("0)u2!–" + sin[(! – ")0]u!–"zu2! – 2 cos(!0)u!z + z2 e–udu, (6)
if | arg(z)| < 0!, or by
E!,"(z) =10
∫∞
0+
sin("0)u2!–" + sin[(! – ")0]u!–"zu2! – 2 cos(!0)u!z + z2 e–udu, (7)
if | arg(z)| > 0!.
Remark 1. For arg(z) = ±!0 we have a singularity in theintegral, leading to inaccurate results. We will analyze andsolve this problem in Section 3.
In numerical computations, we need to truncate the integ-ral above some u0. This originates an error given by:
$ = 10
∫∞
uo
sin("0)u2!–" + sin[(! – ")0]u!–"zu2! – 2 cos(!0)u!z + z2 e–udu.
It can be shown that the function sin("0)u2!+sin(!0)u!–"zu2!–2 cos(!0)u!z+z2
is bounded and approaches sin("0) when u increaseswithout bound. Assume that its absolute value is given bysin("0)(1 + %), % > 0. Then
|$| ≤ (1 + %)0
∫∞
uo
1u"e–udu <
(1 + %)u"00
∫∞
uoe–udu
=(1 + %)u"00
e–u0 . (8)
Therefore, the error decreases exponentially leading to afast convergence of the integral.
In FC applications, we need to compute the MLF onhalf-straight lines, defined by z = pt!%(t). From eq. (2) weobtain the expression:
E!,"(pt!) =∞∑k=0
pktk!
A(k! + ")%(t), p ∈ C, t ∈ R, (9)
where t represents time and %(t) denotes the Heavisideunit step function used to state that eq. (9) is identicallynull for t < 0.
To avoid confusion we call expression (9) as “causalMLF” (CMLF), since it is defined on R and is null on R
– (itcan be considered as the impulse response of a causal sys-tem). Furthermore, in order to simplify notation, we will
Authenticated | [email protected] author's copyDownload Date | 7/13/19 9:07 AM

4 M. D. Ortigueira et al.: On the Numerical Computation
omit %(t). This variable change is inserted in eqs. (6) and(7), where we make v = u/t to get
E!,"(pt!) = p1–"!ep
1! t
! +
t1–"
0
∫∞
0+
sin("0)v2!–" + sin[(! – ")0]v!–"pv2! – 2 cos(!0)pv! + p2 e–vtdv, (10)
if | arg(p)| ≤ 0!, or
E!,"(pt!) =t1–"
0
∫∞
0+
sin("0)v2!–" + sin[(! – ")0]v!–"pv2! – 2 cos(!0)pv! + p2 e–vtdv, (11)
if | arg(p)| > 0!.
In practical applications, it is interesting to deal with theLT. If " = 1 it is a simple task to show that
L[E!,1(pt!)
]=
s!–1
s! – p, (12)
for Re(s) > 0 and |ps–!| < 1 [6]. Given the analyticalproperties of the LT, these conditions can be expressed asRe(s) > max
{Re(p1/!), 0
}. If " ≠ 1, the function in eq. (9)
has a LT with no simple closed form. However, from eqs.(9), (10), and (11) the GMLF
c!,"(t) = t"–1E!,"(pt!), t ∈ R+, (13)
has LT given by:
L[c!,"(t)
]= C!,"(s) =
s!–"
s! – p, !, " ∈ R
+, (14)
for Re(s) > max{Re(p1/!), 0
}.
Frequently we know the LT in (14) that must be inver-ted [17]. In agreement with the Bromwich inversion the-orem, we compute the integral along a vertical straightline passing at Re(s) = 3 > max
{Re(p1/!), 0
}. In this line of
thought, we apply the LT inverse theorem to obtain a func-tion that will be multiplied by e3t; our working domain isa vertical line defined by s = 3+i9, where9 represents theangular frequency in rad/s. With such change of variablewe obtain the Fourier transform (FT):
C!,"(i9) =(3 + i9)!–"(3 + i9)! – p . (15)
The inverse FT of this function is given by
c!,"(t) =120
∫∞
–∞
(3 + i9)!–"(3 + i9)! – pe
i9td9. (16)
The computation of this integral may reveal somedifficulties, because the absolute value of the integranddecreases to zero when 9 increases, but the decrease isvery slow, implying a very high truncation value. To avoidthis problem we can use the bilinear transformation:
s =2T1 – z–1
1 + z–1, z ∈ C, (17)
to obtain, from eq. (14), a function defined in the contextof the Z transform [26]:
Cd(z) =
[2T1–z–11+z–1
]!–"[2T1–z–11+z–1
]!– p
, |z| > 1, (18)
where the subscript d means that we are referring to atransfer function of a discrete-time system.
Remark 2. The sampling time interval T must be small. Inthe integer order applications we choose T to guarantee
that2+pT2–pTepT ≈ 1 [26] for any p ∈ C. In practice, the value
T = 10–3 s is adequate. For the fractional case 0 < ! ≤ 1it is expected to be small, suggesting the value T = 10–4 s.
The time-domain function corresponding to eq. (18) isgiven by:
cd(nT) =120i
∮+Cd(z)zn–1dz, (19)
where + is a circle with center at the origin and radiusgreater than 1. With a change of variable z = e3+i9 =aei9, a = e3 we obtain:
cd(nT) =120i
∫ 0
–0Cd(ei9)ei9nd9, (20)
or, as Hd(ei9) is a 20-periodic function, we can write
cd(nT) = an120i
∫ 20
0Cd(ei9)ei9nd9. (21)
Adopting 9 = 20- expression (21) yields:
cd(nT) =∫ 1
0Cd(ei20-)ei20-nd-. (22)
This integral is suitable for numerical computation bymeans of the FFT. Let us sample the integrand on a dis-crete uniform grid with K = 2M points, -k = 1
K ⋅ k, k =0, 1, . . . ,K – 1, to obtain the discrete Fourier transform:
Authenticated | [email protected] author's copyDownload Date | 7/13/19 9:07 AM

M. D. Ortigueira et al.: On the Numerical Computation 5
cd(nT) ≈1K
K–1∑k=0
Cd(ei20K k)ei
20K kn. (23)
The value of K must be chosen in agreement with desiredhighest value for the time interval: tmx = KT.
To obtain the final estimation values for the CMLFwith this approach we must multiply (23) by the expo-nential e3nT . On the other hand, the relation between thecontinuous-time and the corresponding discrete-time val-ues is obtained by dividing by the sampling interval, T.Therefore, the final CMLF is given by:
cd(nT) = c!,"(nT) ≈ e3nT1KT
K–1∑k=0
Cd(ei20K k)ei
20K kn. (24)
3 The numerical computation of theMLF
Several techniques were proposed for computing the MLF[2, 18–20, 25]. In general, they use the Taylor seriesapproach for small values of the magnitude of the argu-ment, |z|, and the properties of integral representationsand asymptotic behavior for high values of |z|.
Themain idea is to avoid the problems involved in thedirect computation of the series (2). To do the computationwe proceed as follows:(i) Truncate the series to get a polynomial
E!,",N(z) =N∑k=0
zk
A(k! + ") ,
where N is chosen to assure that∣∣∣ zNA(N!+")
∣∣∣ < ', and 'a small value (we use ' = 10–10).
(ii) Compute the terms ck = 1A(k!+") .
For fixed values of ! and ", when k increases,the same happens to A(k! + "). Although depend-ing on !, we can say that in most cases, for k >200 this function becomes ∞ in the numerical rep-resentation. We propose here a simple and robustmethod for calculating the terms ck. Therefore, fora given set of values k and k! + ", we calculate theinteger and fractional parts of k! + ", denoted byP and b, respectively, so that P = �k! + "� andb = k! + " – P. Knowing that A(x + m) = (x)mA(x),where (x)m is the Pochhammer factorial, x ∈ R, m ∈N, we can compute the terms ck by means of theexpression
ck =1
A(b + 1)
P–2∏j=0
(1
b + j
). (25)
Experiments with different values of ! and " revealthat the proposed approach is more robust whencompared with the calculation of the MLF directlyform expression (2). We used A(b + 1) instead of A(b)to avoid the case b = 0.
(iii) Perform polynomial computation.To avoid computing large powers of z we use
the well-known Horner algorithm [24]. This consistsbasically in a recursive computation as described inthe follow-up.
To simplify, write XN(z) = E!,",N(z) in the format
XN(z) = (((cNz + cN–1) z + cN–2) z⋯c1) z + c0. (26)
This representation suggests the following recursiveprocedure for its computation. In each step, we carryout a product and an add. Let us start the algorithmwith n = N,
X–1(z) = cNz + cN–1.
For n = N – 1,⋯, 1, we make
XN–1–n(z) = XN–2–n(z)z + cn–1.
As seen, we carry N multiplications and N adds, butwe do not need to compute the powers of z.
The algorithm described is effective for small values of|z|. On the other hand, the computation of the MLF(2) and the CMLF (9) by means of the integral formu-lations (6)–(7) and (10)–(11), respectively, yields goodresults for high values of |z|, but reveals difficultiesfor small values of the argument. Therefore, hereinwe combine both approaches. The procedure is thefollowing:(i) Consider 2 positive real values: x1 < x2. For |z| ≤ x1
we use the above polynomial-based approximationto compute the MLF. We denote by f1(z) the obtainedfunction, and we use it to approximate the MLF for|z| ≤ x1.
(ii) For |z| ≥ x2 we use the integral formulations (6)–(7).As above, we denote this function by f2(z), and use itto approximate the MLF for |z| ≥ x2.
(iii) For x1 < |z| < x2 we use a weighted average of bothmethods, f1(z) and f2(z):
Authenticated | [email protected] author's copyDownload Date | 7/13/19 9:07 AM

6 M. D. Ortigueira et al.: On the Numerical Computation
a. Define two real weight functions w1(z) =1 – |z|–x1
x2–x1 , for x1 ≤ |z| ≤ x2 and w2(z) = |z|–x1x2–x1
for x1 ≤ |z| ≤ x2, such that w1(z) + w2(z) = 1,for x1 ≤ |z| ≤ x2.
b. In the interval x1 < |z| < x2, the MLF is approxim-ated by the weighted average:
f (z) = w1(z)f1(z) + w2f2(z). (27)
This is important to avoid jumps.
In the follow-up we compute theMLF (1)–(2), the CMLF (9)and the GMLF (13) for different values of their parameters(Table 1). All of the experiments are performed in MatlabR2015a, under Windows 7, 64-bit, on a Intel(R) Core(TM)i5 CPU @ 3.20 GHz computer. The results obtained withthe proposed methods and those generated by the P&K-MLF [27] and Gar-MLF [28] algorithms are compared interms of accuracy and computational time. For the P&K-MLF approach we use precision 10–8. For the Gar-MLF weuse the default settings. As a reference for accuracy weadopt the values calculated with the software Mathemat-ica (Mat-MLF).
In the first experiment, C1, we calculate the MLF bymeans of the polynomial and general integral formulation(Int-MLF), given by (6)–(7), (27). The integral is computedthrough the Matlab function integral. The parametersare (!, ") = (0.6, 1), and the domain are the circumfer-ences defined by |z| ∈ [1, 1.1], arg(z) ∈ [–0,0]. Figure 3depicts the results in the complex plane. We verify thatthe Int-MLF and Gar-MLF lead to accurate results (closeto those obtained with the Mat-MLF), while the P&K-MLFreveals difficulties for certain values of z, namely whenarg(z) = ±!0.
Remark 3. For arg(z) = ±!0 we have one pole on thebranchcut line. In this case, for avoiding inaccurate results
Figure 3: The value of the MLF calculated with the P&K-MLF,Gar-MLF, Int-MLF and Mat-MLF algorithms, for (!, ") = (0.6, 1),|z| ∈ [1, 1.1], and arg(z) ∈ [–0,0].
with the Int-MLFmethod, we should replace u by u ⋅ei(, |(| <02 , in the integral equations (6)–(7), to move the branchcutfrom 0 towards 0 – (.
In the two next experiments {C2,C3} we assess the meth-ods in terms of accuracy and computational time. Thedomain is the straightline defined by |z| ∈]0, 100], arg(z) =!0. For C2 the parameters are (!, ") = (0.5, 1), while forC3 we have (!, ") = (0.5, 0.4). Figure 4 depicts the errorE = |E!,"–E!,"|, where E!,"(z) and E!,"(z) denote the valuescalculated by the numerical methods and those obtainedwith Mathematica, respectively. Occasional gaps in theerror curve correspond to E = 0. Figure 5 shows the com-putational time, tC, required for the numerical evaluationof the MLF with the different algorithms.
Table 1: Set of experiments illustrating the methods proposed.
Label Function Parameters Domain MethodC1 MLF (1)–(2) (!, ") = (0.6, 1) |z| = 1, arg(z) ∈ [1, 1.1] Int-MLF (6)–(7), (27)C2 MLF (1)–(2) (!, ") = (0.5, 1) |z| ∈]0, 100], arg(z) = !0 Int-MLF (6)–(7), (27)C3 MLF (1)–(2) (!, ") = (0.5, 0.4) |z| ∈]0, 100], arg(z) = !0 Int-MLF (6)–(7), (27)C4 MLF (1)–(2) (!, ") = (0.7, 1) |z| ∈]0, 100], arg(z) = ! 0
2 Int-MLF (6)–(7), (27)C5 MLF (1)–(2) (!, ") = (1.2, 0.7) |z| ∈]0, 100], arg(z) = ! 0
2 Int-MLF (6)–(7), (27)C6 CMLF (9) (!, ") = (0.7, 0.9) t ∈]0, 20], p = –1 Int-CMLF (10)–(11), (27)C7 CMLF (9) (!, ") = (0.7, 0.9) t ∈]0, 20], p = –1 + i Int-CMLF (10)–(11), (27)C8 GMLF (13) (!, ") = (0.7, 1) t ∈]0, 20], p = –1 FFT-GMLF (24)C9 GMLF (13) (!, ") = (0.7, 1) t ∈]0, 20], p = –1 + i FFT-GMLF (24)
Authenticated | [email protected] author's copyDownload Date | 7/13/19 9:07 AM

M. D. Ortigueira et al.: On the Numerical Computation 7
Figure 4: The error, E, in the numerical evaluation of the MLF for thecases (a) C2: (!, ") = (0.5, 1), |z| ∈]0, 100], arg(z) = !0; (b) C3:(!, ") = (0.5, 0.4), |z| ∈]0, 100], arg(z) = !0.
Weobserve that the Int-MLF leads tomore accurate resultsthan the Gar-MLF and P&K-MLF algorithms, particularlyfor larger values of |z|. For |z| small, the P&K-MLFdiverges. In terms of computational time, we verify thattC is smaller, and remains nearly constant, for the Gar-MLF algorithm. Both for the Int-MLF and P&K-MLF, thecomputational time is non-uniform, varying more thanone order of magnitude. In general, the Gar-MLF methodrequiresmore time than its counterparts for evaluating theMLF.
Experiments {C4,C5} assess the methods in anotherdemanding domain, defined by |z| ∈]0, 100], arg(z) =!02 . The parameters are (!, ") = (0.7, 1), and (!, ") =
(1.2, 0.7), for C4 and C5, respectively. Figures 6 and 7
Figure 5: The computational time, tC, to evaluate the MLF for thecases (a) C2: (!, ") = (0.5, 1), |z| ∈]0, 100], arg(z) = !0; (b) C3:(!, ") = (0.5, 0.4), |z| ∈]0, 100], arg(z) = !0.
depict the error, E, and the computational time, tC,obtained with the different algorithms. We observe thatthe Int-MLF and the Gar-MLF yield similar accuracy andare better than the P&K-MLF algorithm. Moreover, theGar-MLF is more efficient in terms of computationaltime.
In the experiments {C6,C7} we calculate the CMLF.Weuse the integral formulation (Int-CMLF) given in the for-mulas (10)–(11). For both experiments the parameters are(!, ") = (0.7, 0.9), and t ∈]0, 20]. In C6 we use p = –1,while in C5 we adopt p = –1 + i. Figure 8 shows the error,E = |E!," – E!,"|, with E!," and E!," denoting the valuescalculated numerically and obtained with Mathematica,respectively. Figure 9 depicts the computational time, tC.
Authenticated | [email protected] author's copyDownload Date | 7/13/19 9:07 AM

8 M. D. Ortigueira et al.: On the Numerical Computation
Figure 6: The error, E, in the numerical evaluation of the MLF for thecases (a) C4: (!, ") = (0.7, 1), |z| ∈]0, 100], arg(z) = ! 0
2 ; (b) C5:(!, ") = (1.2, 0.7), |z| ∈]0, 100], arg(z) = ! 0
2 .
The Int-CMLF and Gar-MLF lead to identical values of E,while for the P&K-MLF the error is considerable larger.The computational time, tC, is smaller for the Gar-MLFalgorithm.
In the examples {C8,C9}, we calculate the GMLF fort ∈]0, 20] and parameters (!, ") = (0.7, 1). Such value for" allows comparing our method based on the inversionof the LT using the FFT (FFT-GMLF), given by (24), withthe Int-CMLF, the P&K-MLF and the Gar-MLF algorithms.For the experiments C8 and C9 we adopt p = –1 andp = –1 + i, respectively. Figures 10 and 11 depict theerror, E, and the computational time, tC. Regarding accur-acy, the FFT-GMLF algorithm performs slightly betterthan the P&K-MLF, and worse than the Int-CMLF and
Figure 7: The computational time, tC, to evaluate the MLF for thecases (a) C4: (!, ") = (0.7, 1), |z| ∈]0, 100], arg(z) = ! 0
2 ; (b) C5:(!, ") = (1.2, 0.7), |z| ∈]0, 100], arg(z) = ! 0
2 .
Gar-MLF. With respect to computational time, we observethat FFT-GMLF is considerably slower than the alternativemethods.
In conclusion, we verify that for evaluating the MLFand the CMLF, the proposedmethods, namely the Int-MLFand the Int-CMLF, yield results identical to those obtainedwith the Gar-MLF, and perform better than the P&K-MLFalgorithm. In terms of computational time, the Gar-MLFalgorithm superior to the other methods. For calculatingthe GMLF, the FFT-GMLF is more accurate than the P&K-MLF, requiring however a larger computational effort.Therefore, the proposed methods represent alternativesto those already available, and can be implementedeasily.
Authenticated | [email protected] author's copyDownload Date | 7/13/19 9:07 AM

M. D. Ortigueira et al.: On the Numerical Computation 9
Figure 8: The error, E, in the numerical evaluation of the CMLF forthe cases (a) C6: (!, ") = (0.7, 0.9), t ∈]0, 20], p = –1; (b) C7:(!, ") = (0.7, 0.9), t ∈]0, 20], p = –1 + i.
4 Computation of the 3-parameterCMLF
The 3-parameter GMLF is defined by:
c!,",γ (t) = t"–1 ⋅∞∑k=0
(–γ )kk!
tk!
A(k! + ")%(t),
z ∈ C, !, ", γ , t ∈ R. (28)
Its LT is given by:
C!,",γ (s) =s!γ–"
(s! – p)γ, γ ∉ Z, (29)
for Re(s) = 3 > max{Re(p1/!), 0
}. If γ ∈ Z+, then we obtain
a combination of MLF. If γ ∈ Z–, then we have a sum ofpowers of the type t!.
Figure 9: The computational time, tC, to evaluate the CMLF for thecases (a) C6: (!, ") = (0.7, 0.9), t ∈]0, 20], p = –1; (b) C7:(!, ") = (0.7, 0.9), t ∈]0, 20], p = –1 + i.
For computing c!,",γ (t) we need to adapt procedurespresented in Section 3 as follows:(i) Computation based on the integral formulation
In this case the LT (29) does not have any pole,meaning that its inverse assumes the form [24]:
c!,",γ (t) =120i ⋅∫
∞
0+
ei"0(u! – pe–i!0)γ – e–i"0(u! – pei!0)γ
[u2! – 2p cos(!0)u! + p2]γ ⋅ u"–!γe–utdu⋅
%(t). (30)
(ii) Computation based on the inversion of the LT usingthe FFT
In this case, the approach is similar to that usedin (18), yielding:
Authenticated | [email protected] author's copyDownload Date | 7/13/19 9:07 AM

10 M. D. Ortigueira et al.: On the Numerical Computation
Figure 10: The error, E, in the numerical evaluation of the GMLF forthe cases (a) C8: (!, ") = (0.7, 1), t ∈]0, 20], p = –1; (b) C9:(!, ") = (0.7, 1), t ∈]0, 20], p = –1 + i.
Cd(z) =
[2T1–z–11+z–1
]!⋅γ–"{[
2T1–z–11+z–1
]!– p
}γ . (31)
We compare the performance of the FFT-GMLF and Gar-MLF methods for the parameters (!, ", γ ) = (0.7, 1, 0.8),and argument t ∈]0, 20], p = –1 + i. Figure 12 depictsthe value of GMLF and the computational time. We verifyagain the good performance of the proposed method interms of accuracy, while tC is considerably larger.
Figure 11: The computational time, tC, to evaluate the GMLF for thecases (a) C8: (!, ") = (0.7, 1), t ∈]0, 20], p = –1; (b) C9: (!, ") = (0.7, 1),t ∈]0, 20], p = –1 + i.
5 ConclusionsIn this paper, we proposed algorithms for efficiently com-puting the MLF and its particular version, the CMLF,based on polynomial calculations and integral formulas.For the GMLF another method, relying on the inversionof the LT using the binomial transformation and the FFT,was proposed. Simulation results comparing the new andtwo well-known methods, regarding the computationaltime and accuracy, showed the effectiveness of the pro-posed approach.
Authenticated | [email protected] author's copyDownload Date | 7/13/19 9:07 AM

M. D. Ortigueira et al.: On the Numerical Computation 11
Figure 12: The GMLF for parameters (!, ", γ ) = (0.7, 1, 0.8), andargument t ∈]0, 20], p = –1 + i: (a) GMLF value; (b) computationaltime, tC.
Acknowledgment: This work was funded by Por-tuguese National Funds through the FCT - Foundationfor Science and Technology under the project PEst-UID/EEA/00066/2013.
References[1] R. Gorenflo, J. Loutchko and Y. Luchko, Computation of the
Mittag-Leffler function E!,"(z) and its derivative, Fract. Calc.Appl. Anal. 5 (2002), 491–518.
[2] R. Gorenflo, A. A. Kilbas, F. Mainardi and S. V. Rogosin,Mittag-Leffler functions, related topics and applications,Springer, Berlin Heidelberg New York, 2014.
[3] F. Mainardi and R. Gorenflo, On Mittag-Leffler-type functions infractional evolution processes, J. Comput. Appl. Math. 118(2000), 283–299.
[4] G. M. Mittag-Leffler, Sur la nouvelle fonction E!(x), CR Acad.Sci. Paris 137 (1903), 554–558.
[5] T. E. Huillet, On Mittag-Leffler distributions and relatedstochastic processes, J. Comput. Appl. Math. 296 (2016),181–211.
[6] A. A. Kilbas, H. M. Srivastava and J. J. Trujillo, Theory andapplications of fractional differential equations, vol. 204,North-Holland Mathematics Studies, Elsevier, Amsterdam,2006.
[7] V. S. Kiryakova, Multiple (multiindex) Mittag-Leffler functionsand relations to generalized fractional calculus, J. Comput.Appl. Math. 118 (2000), 241–259.
[8] N. Kopteva and M. Stynes, Analysis and numerical solution of aRiemann-Liouville fractional derivative two-point boundaryvalue problem, Adv. Comput. Math. 43 (2017), 77–99.
[9] M. D. Ortigueira, C. M. Ionescu, J. T. Machado and J. J. Trujillo,Fractional signal processing and applications, Signal Process.107 (2015), 197–197.
[10] M. D. Ortigueira, J. A. T. Machado, J. J. Trujillo and B. M.Vinagre, Fractional signals and systems, Signal Process. 91(2011), 349–349.
[11] M. D. Ortigueira, Fractional calculus for scientists andengineers, Lecture Notes in Electrical Engineering, Springer,Berlin Heidelberg, 2011.
[12] M. D. Ortigueira and J. A. T. Machado, Fractional signalprocessing and applications, Signal Process. 83 (2003),2285–2286.
[13] M. D. Ortigueira and J. A. T. Machado, Fractional calculusapplications in signals and systems, Signal Process. 86(2006), 2503–2504.
[14] I. Podlubny, Fractional differential equations: an introductionto fractional derivatives, fractional differential equations, tomethods of their solution and some of their applications, vol.198, Academic press, San Diego, 1998.
[15] X. J. Yang and D. Baleanu, Fractal heat conduction problemsolved by local fractional variation iteration method, Therm.Sci. 17 (2013), 625–628.
[16] X. J. Yang, H. M. Srivastava, J. H. He and D. Baleanu,Cantor-type cylindrical-coordinate method for differentialequations with local fractional derivatives, Phys. Lett. A 377(2013), 1696–1700.
[17] R. Magin, M. D Ortigueira, I. Podlubny and J. Trujillo, On thefractional signals and systems, Signal Process. 91 (2011),350–371.
[18] R. Garrappa and M. Popolizio, Evaluation of generalizedMittag-Leffler functions on the real line, Adv. Comput. Math.39 (2013), 205–225.
[19] H. Seybold and R. Hilfer, Numerical algorithm for calculatingthe generalized Mittag-Leffler function, SIAM J. Numer. Anal.47 (2008), 69–88.
[20] D. Valério and J. T. Machado, On the numerical computation ofthe Mittag-Leffler function, Commun. Nonlinear Sci. Numer.Simul. 19 (2014), 3419–3424.
[21] D. Valério, J. J. Trujillo, M. Rivero, J. T. Machado and D.Baleanu, Fractional calculus: a survey of useful formulas, TheEur. Phys. J. Spec. Top. 222 (2013), 1827–1846.
[22] F. Oberhettinger, A. Erdélyi, W. Magnus and F. G. Tricomi,Higher transcendental functions, vol. 3, McGraw-Hill,1955.
[23] C. Lavault, Fractional calculus and generalized Mittag-Lefflertype functions, arXiv:1703.01912v2 (2017).
Authenticated | [email protected] author's copyDownload Date | 7/13/19 9:07 AM

12 M. D. Ortigueira et al.: On the Numerical Computation
[24] P. Henrici, Applied and computational complex analysis, vol. 1,Wiley-Interscience, New York, 1974.
[25] R. Hilfer and H. J. Seybold, Computation of the generalizedMittag-Leffler function and its inverse in the complex plane,Integr. Transform. Spec. Funct. 17 (2006), 637–652.
[26] M. J. Roberts, Signals and systems: Analysis using transformmethods and Matlab, McGraw-Hill, New York, 2003.
[27] I. Podlubny and M. Kacenak, MLF - Mittag-Leffler function,September 2012.
[28] R. Garrapa, The Mittag-Leffler function, December 2015.
Authenticated | [email protected] author's copyDownload Date | 7/13/19 9:07 AM