MANUAL DE INSTALACION Y USO · PDF fileMANUAL DE INSTALACION Y USO v1.0 IOCards USBSTEPPER...

If you can't read please download the document
Transcript of MANUAL DE INSTALACION Y USO · PDF fileMANUAL DE INSTALACION Y USO v1.0 IOCards USBSTEPPER...
OPENCOCKPITSIOCardUSBSTEPPER
MANUALDEINSTALACIONYUSO
MANUALDEINSTALACIONYUSOv1.0 IOCardsUSBSTEPPER
MANUALDEINSTALACINYUSO
IOCardsUSBSTEPPER
2
INTRODUCCION
LaplacaUSBStepperpuedegestionarhasta3motorespasoapaso,tantobipolarescomounipolares.
Estaplacapermitecontrolarmuyfcilmentelosmotorespasoapasoquepuedenservircomobase,porejemplo,agaugesquenecesitendeungirodemasdeunavuelta,comoenelcasodeunaltmetroyenlosqueunservonoseasuficiente.
La conexinde la tarjetaalordenadoresmediantepuertoUSB yal conectarlaesautomticamentedetectadaeinstaladacomodispositivoHID,asimismoparasugestinseusaelprotocoloIOCP.
LISTADODECOMPONENTES
- C1,C4,C5,C6,C7=CONDENSADORES0.1Mf- C2,C3=CONDENSADORES22Pf- D1aD24=DIODOS1N4007- IC1=MICROCONTROLADOR16C745- IC2,IC3,IC4=CIRCUITOSINTEGRADOSL293E- J1=CONECTORUSB- J2=CONECTORALIMENTACION2PINES- J3,J4,J5,J9,J10,J11=CONECTORESDE3PINES- J6,J7,J8=CONECTORES5PINES- Q1=CRISTALCUARZO6MHZ- R1=RESISTENCIA100R- R2,R4,R5,R6=RESISTENCIA10K- R3=RESISTENCIA1K5- SW1=RESET2PINES
MANUALDEINSTALACIONYUSOv1.0 IOCardsUSBSTEPPER
MANUALDEINSTALACINYUSO
IOCardsUSBSTEPPER
3
DIMENSIONESPRINCIPALES:
DESCRIPCIONDELOSCONECTORES:
J1=PermitelaconexinalordenadordirectamenteatravsdelpuertoUSB.EnelmomentodeconectarseelordenadorreconocerlatarjetayautomticamenteinstalareldriverparadispositivosHID.
J2=Conectordealimentacinparalosmotores(lamismaalimentacinparalos3) J3aJ5=Conectoresparalasentradasanalgicas. J6aJ8=Conectoresparalosmotores(veresquemadeconexionado) J9aJ11=Conectoresde3pinesparalossensoresdeposicin
ESQUEMADECONEXIONADO
Laconexindelatarjetaesextremadamentesimple,paralospotencimetrostenemoslosconectoresde3pines(J3aJ6)yvanconectadoscomopodemosverenlaimagen.
ParalosmotorestenemoslosconectoresJ6aJ8,conectandolosmotoresenfuncindeltipodemotorqueusemos(verseccinmotoresmsabajo).
Paralosmotoresbipolares,usaremoslospines1y3paraunabobinaylospines2y4paralaotrabobina,dejandoelpin5 libre.Paraconectar losmotoresunipolaresusaremos losmismospinesperoenestecasousaremoselpin5paraconectarelcomnde lasbobinas,enelcasode5cablessolotenemosuncablecomn,peroenelde6hilosdebemosjuntarlos2comunesyconectarlos,comoantes,enelpin5.
MANUALDEINSTALACIONYUSOv1.0 IOCardsUSBSTEPPER
MANUALDEINSTALACINYUSO
IOCardsUSBSTEPPER
4
Los sensores,asimismovan conectadosen los conectores J9a J11en la formaquepodemosverenelesquemapublicadomsabajo,deestaformapodremoscontrolarelnmerodepasosdecadavuelta(verseccinsensoresmsabajo).
MOTORESPASOAPASO
Lacaractersticaprincipaldelosmotorespasoapasoeselhechodepodermoverseunpasocadavez,porcadapulsoqueleenviemos.
Estos pasos pueden variar segn los grados que semueve en cada pulso, que van desde los 90o hasta losmspequeos,quesemueven1.8o,siendoestosltimos losquemsprecisinnospuedendar,estoquieredecirque
MANUALDEINSTALACIONYUSOv1.0 IOCardsUSBSTEPPER
MANUALDEINSTALACINYUSO
IOCardsUSBSTEPPER
5
paradarunavueltacompleta(360o),paraelprimercasonecesitaramostansolo4pasos(90ox4=360o),siendonecesariosparaelsegundocaso200pasos(1.8ox200=360o).
Estosmotoresestnformadosbsicamenteporunrotorsobreelquevanaplicadosdiferentesimanespermanentesyporunciertonmerodebobinasexcitadoras,bobinadasensuestator.Lasbobinassonpartedelestatoryelrotoresunimnpermanente.Todalaexcitacindelasbobinasdebecontrolarseexternamente,medianteelcontroladoradecuado.
Dependiendodelaconfiguracindelasbobinasdelestatortendremosbsicamentedostiposdiferentesdemotorespasoapaso:
BIPOLARES:
Usualmente tienencuatrocablesquecorrespondena losextremosde lasdosbobinasque lo forman (verdibujoexplicativoarriba)
UNIPOLARES:
Estossuelentener5o6cables,dependiendodelconexionado internodel cablecomnde lasbobinas(verdibujomsarriba),obsrvesequeelcomnenelcasode losmotoresde6cablespuedeunirseasimismoexternamente,paraqueelconexionadoseade5cables.
Para la tarjetaUSBSteppernoesproblema controlarningunode losdos tipos, tantobipolares comounipolares,simplementedebenconfigurarseadecuadamenteloscablesaconectar.
Debetenerseencuenta,quecomodispositivosmecnicosqueson, losmotorespasoapasodebenvencerciertasinercias,porlotantoeltiempodeduracinylafrecuenciadelospulsosaplicadosesunpuntomuyimportante.Esestesentidoelmotordebealcanzarelpasoantesdeenviarleelsiguientepulso,porestemotivo,silafrecuenciadepulsosesmuyelevada,elmotorpodrareaccionardelasiguienteforma:
Norealizarningnmovimientoenabsoluto Vibraperosinllegaragirar Giroerrtico Ollegaragirarensentidocontrarioaldeseado
Sinodisponemosdehojasdedatosdelosmotores,bienporqueseanrecicladosorecuperados,obienporquesonnuevosperonodisponemosdeesosdatos,esposibleaveriguar ladistribucinoconexionadode loscablesa losbobinados y el cable comn, en el caso de unipolares de 5 o 6 cables, siguiendo unas pequeas instruccionesdetalladasacontinuacin:
Enelcasodemotoresunipolaresde6cables,esmejorunir losdoscablescomunes(generalmentesondelmismocolor)antesdeempezararealizarlostests.
MANUALDEINSTALACIONYUSOv1.0 IOCardsUSBSTEPPER
MANUALDEINSTALACINYUSO
IOCardsUSBSTEPPER
6
Useuntesterparachequearlaresistenciaentreparesdecables,elcablecomn,serelnicoquetengalamitaddelaresistencia.Estoesdebidoaqueentreelcomnycualquierotrocablesolotieneunabobina,encambioentrelosparesdecablessiempreexistendosbobinas(veresquemadetesteo)
Enestecaso,simedimosconeltester laresistenciaentre lospuntosAyB,obtendremosunaresistenciax,perosiporelcontrariomedimosentrelospuntosAyCoByC,solamenteobtendremoslamitaddelaresistencia,locualnosindicaraqueelcableCeselcomn.
Para losmotoresbipolares (generalmentede4cables), la identificacinesmssencilla,simplementemidiendo laresistenciaentreparesdecables,losqueformaranpartedelamismabobinatendrncontinuidad(resistenciamuybaja), siendo los otros dos cables los extremos de la otra bobina. Para averiguar la polaridad de estas bobinas,simplementeloharemosconelmtodopruebayerror,invirtiendoloscablesdeposicinsielsentidodegironoeselesperado.
Recuerde:
Unmotorcon5cableses,casiseguro,UNIPOLAR. Unmotor con6 cableses, casi seguroasimismo,UNIPOLAR,pero con2 cables comunes (pueden serdel
mismocolor)
Unmotorconsolo4cablesescomnmenteBIPOLAR
SENSORESDEPOSICION
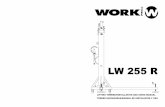
www.amidata.esref304560
EstossensoresnosservirnparaquelatarjetaUSBStepperconozcasiemprelaposicindelejecuandoelmotorgira,aseleje,quedasiempreenlamismaposicin.
Latarjeta,alconectarsealsoftware,loprimeroquehaceescomenzaragirarelmotorparaquepasehasta2vecesporelsensorptico.Porqu2veces?,pueslaprimeraloquehaceesponeruncontadorinternoa0yapartirdeestemomentoempiezaacontarelnumerodepasosquedahastacompletarlasegundavueltaypasarporsegunda
MANUALDEINSTALACIONYUSOv1.0 IOCardsUSBSTEPPER
MANUALDEINSTALACINYUSO
IOCardsUSBSTEPPER
7
vezporelsensorptico,asconoceexactamenteelnumerodepasosquedaelmotoryeltiempoquetardaendaresavueltacompleta.
Enestemomento,yaconocemoselnumerodepasosdeunavuelta,asimismoconocelaposicininicialmarcadaporel sensor, entonces ya puede calcular cualquier posicin relativa a partir de esa posicin inicial, simplementellevandolacuentadelospasosquedahaciaunladoyhaciaelotro.
Los sensores pticos que se utilicen deben ser capaces de suministrar tensiones TTL (o y +5V), por esto serecomiendanlosquellevanincorporadalamicroelectrnicaparaentregartensionesTTL.
Es tos sensores consisten en un emisor de luz y un receptor, de talmanera que la tensin pasa a ser 0 al serinterrumpidoelrayoyde+5Vcuandoelsensornoestobturado.
Paraelconexionado,veaelesquemamsarriba.
NosotrosrecomendamosporejemploelquesepuedelocalizarenAMIDATAenwww.amidata.esconreferencia304560,esteeselesquemadedimensionesypinesdelcitadosensor:
USANDOSIOC
Asegresedequetieneinstaladalaversin3.46osuperior,sinolatienepuedebajarselaltimaversinaqu:
http://www.opencockpits.com/catalog/info/information.php?info_id=31&cPath=2
Unavez tenga instalada laversinadecuada, loprimeroqueharemos ser configurar losparmetrosdel ficherosioc.ini,para asegurarnosdeque la tarjeta este correctamente identificada con elnumerodedispositivoque lecorresponda.
Deberemoseditar laentradaenel fichero sioc.ini,de talmaneraqueasignemosun ndicededispositivoa cadatarjetaqueinstalemos,creandounaentradaenelficherosioc.iniporcadatarjetaUSBStepperconectada,yserenelsiguienteformato:
USBStepper=XX,YY
DondeXXnos indicaelnmerode ndice,dentrodenuestrosistemadetarjetaseYYelnmerodeDispositivodelpuertoUSBalqueestconectado.
Porejemplo, si conectamosdos tarjetasUSBStepper con losnmerosdedispositivos35 y42 (estosnmeros sepuedenaveriguarfcilmenteconelpropioprogramaSIOC.exe,yaqueenlsenossuministra la informacinde latarjeta)entonceslasdeclararamosenelsioc.inidelasiguientemanera:
MANUALDEINSTALACIONYUSOv1.0 IOCardsUSBSTEPPER
MANUALDEINSTALACINYUSO
IOCardsUSBSTEPPER
8
USBStepper=1,35USBStepper=2,42
No hay problema por tenerms tarjetas IOCards conectadas en este ordenador,mientras estn correctamentedefinidas,comotampocoportenermdulosOpencockpitstambinconectados.
MOTORESPASOAPASO:
Parahacer referenciaalnmerodeservode formaexacta,debemos tenerencuentaelnmerode ndiceque lehemosasignadoacadaunadelastarjetasUSBRelays.
AhoraenSIOC,debemosdefinirlasalidaenlaformaestndar:
VarVVVV,nameNNNNNNNNNNNN,LinkUSB_STEPPER,deviceDD,OutputS,posLLLL,posCCCC,posRRRR,TypeT
VVVV=nmerovariable
NNNNNNNNNNNNNN=nombrevariable(opcional)
DD = numero de ndice definido en el ini (opcional, si la tenemos declarada como 0 no importa hacerreferenciaalnmerodeDevice)
S=numerodemotor13
LLL=valordelavelocidaddelmotor0255(cuantomenorseasuvalor,mayorvelocidad,perodebemostenercuidadodenosobrepasarlavelocidadmximadelmotor)
CCC=numerodepasosdelmotor065535(s