MANATEE ® ®® ® SIMULATION · PDF file... MANATEE under Matlab ... •...
62
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected] MANATEE MANATEE MANATEE MANATEE ® ® ® ® SIMULATION SOFTWARE SIMULATION SOFTWARE SIMULATION SOFTWARE SIMULATION SOFTWARE Magnetic Acoustic Noise Analysis Tool for Electrical Engineering Presentation of MANATEE software (v1.05) developed and distributed by EOMYS (www.eomys.com)
Transcript of MANATEE ® ®® ® SIMULATION · PDF file... MANATEE under Matlab ... •...

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
MANATEEMANATEEMANATEEMANATEE® ® ® ® SIMULATION SOFTWARESIMULATION SOFTWARESIMULATION SOFTWARESIMULATION SOFTWARE
Magnetic Acoustic Noise Analysis Tool for Electrical Engineering
Presentation of MANATEE software (v1.05) developed and distributed by EOMYS (www.eomys.com)
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
I.I.I.I. PRESENTATIONPRESENTATIONPRESENTATIONPRESENTATIONMANATEE is a simulation software for the optimal electromagnetic design of electrical machines optimal electromagnetic design of electrical machines optimal electromagnetic design of electrical machines optimal electromagnetic design of electrical machines including the analysis of magnetic vibrations and acoustic noisemagnetic vibrations and acoustic noisemagnetic vibrations and acoustic noisemagnetic vibrations and acoustic noise due to Maxwell forces.
Two versions exist: MANATEE under Matlab® (R2009b or later) without specific GUI, and pyMANATEEfor Python (with GUI –release planned summer 2016).
MANATEE does not use any Matlab toolbox.MANATEE does not use any Matlab toolbox.MANATEE does not use any Matlab toolbox.MANATEE does not use any Matlab toolbox.
Based on the hybridation of analytical, semi-analytical and finite element methods for electromagnetic and mechanical models, MANATEE represents the best compromise between accuracy and best compromise between accuracy and best compromise between accuracy and best compromise between accuracy and calculation timecalculation timecalculation timecalculation time, allowing to include the variable-speed noise and vibration criteria during a fast prototyping phase or a design optimization process.
2

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
The following topologies are included in MANATEE v1.05 :
• Inner rotor squirrel cage induction machine (including doubly-fed operation)
• Inner or outer rotor surface, inset or buried permanent magnet synchronous machine

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
A few figures about MANATEE:
• Up 40 dB 40 dB 40 dB 40 dB acoustic noise reductionacoustic noise reductionacoustic noise reductionacoustic noise reduction after redesign based on EOMYS consulting activities
• Successfully applied on both synchronous & induction machines, inner & outer rotor, from W to MW from W to MW from W to MW from W to MW range
• more than 100 graphical post100 graphical post100 graphical post100 graphical post----processingsprocessingsprocessingsprocessings
• ~20000 code lines (without counting comments)
Our references:
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
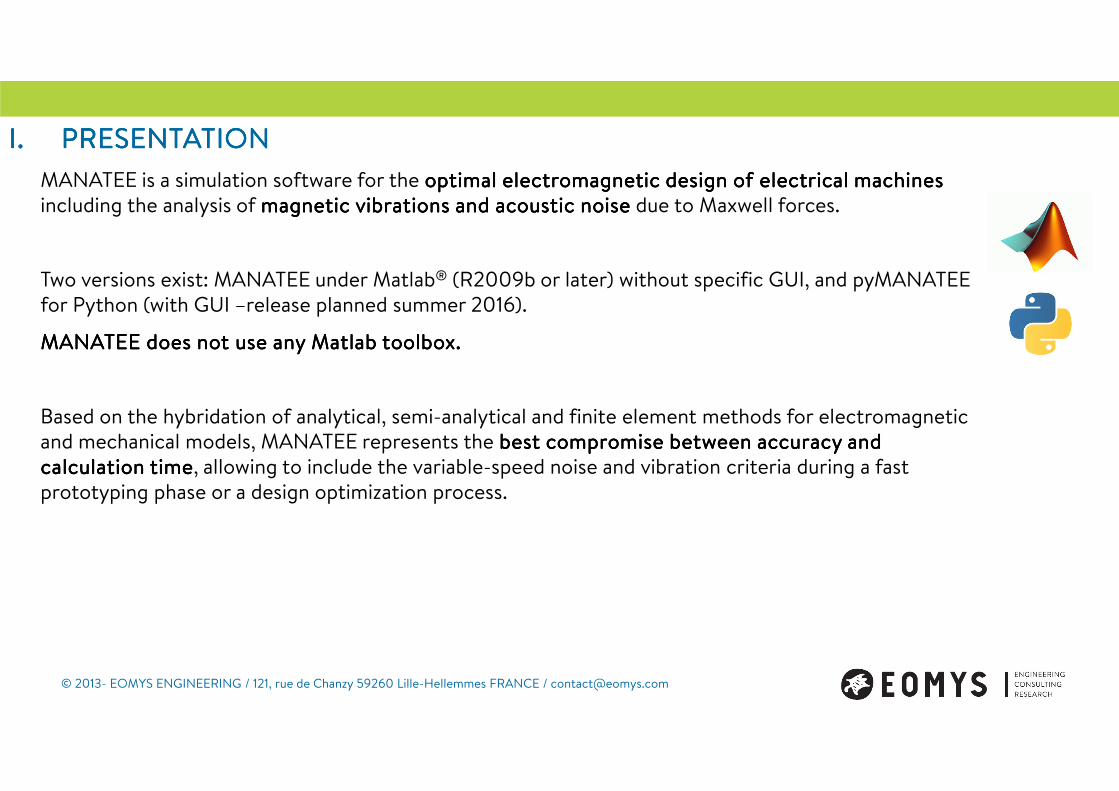
Magnet /
current
excitations
ELECTROMAGNETIC ELECTROMAGNETIC ELECTROMAGNETIC ELECTROMAGNETIC MODULEMODULEMODULEMODULE
ELECTRICAL ELECTRICAL ELECTRICAL ELECTRICAL MODULEMODULEMODULEMODULE
STRUCTURAL STRUCTURAL STRUCTURAL STRUCTURAL MODULEMODULEMODULEMODULE
ACOUSTIC ACOUSTIC ACOUSTIC ACOUSTIC MODULEMODULEMODULEMODULE
MANATEE software contains the following multiphysic modules:
Dynamic
vibrationsVariable
speed noise
level
Geometry
and control
parameters
VARIABLE SPEED MODULEVARIABLE SPEED MODULEVARIABLE SPEED MODULEVARIABLE SPEED MODULEMULTIMULTIMULTIMULTI----SIMULATION MODULESIMULATION MODULESIMULATION MODULESIMULATION MODULE
OPTIMIZATION MODULEOPTIMIZATION MODULEOPTIMIZATION MODULEOPTIMIZATION MODULE
3D magnetic
force distribution
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
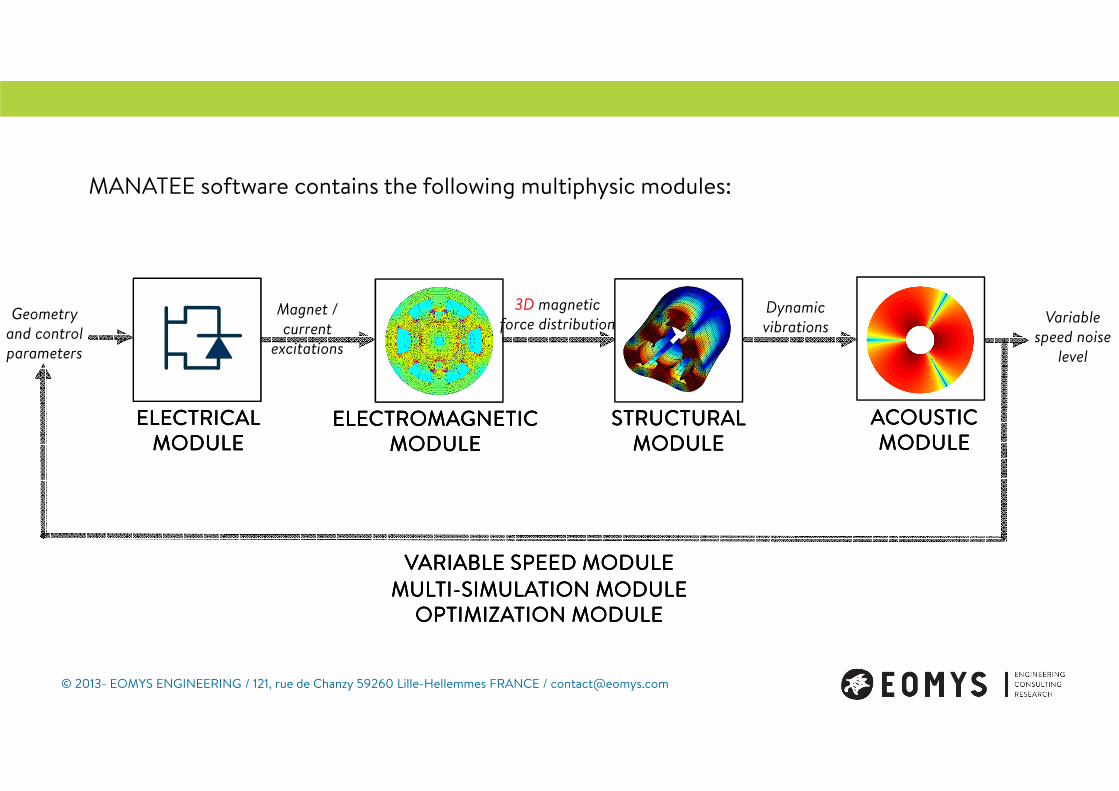
II.II.II.II. ELECTRICAL MODEL ELECTRICAL MODEL ELECTRICAL MODEL ELECTRICAL MODEL
EQUIVALENT CIRCUITEQUIVALENT CIRCUITEQUIVALENT CIRCUITEQUIVALENT CIRCUIT
Option 1: Simulink® PWM block
Option 2: Numerically generated PWM
Phase voltage waveforms
PWM MODELPWM MODELPWM MODELPWM MODEL
User defined voltage
waveforms
Phase currentwaveforms
User defined current
waveforms
• PWM model with several strategies (synchronous, asynchronous, calculated, full wave)
Machine and converter input parameters
User defined
equivalent circuit
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
MANATEE electromagnetic model relies on the fast calculation of the airgap radial and tangential flux density with the following modelling methods :
• Permeance / MMF analytical models
• Subdomain semi-analytical models
• Finite element non linear magnetostatic model (FEMM)
The permeance / MMF decomposition based on winding functions allows to include PWM harmonics, skewing and geometrical asymmetries (eccentricities, non uniform airgap) and faults (broken bars, short-circuits) within a few seconds of calculation.
The subdomain models also allows to include PWM harmonics and skewing within a few seconds of calculation, but does not not account for uneven airgap and eccentricity.
III.III.III.III. ELECTROMAGNETIC MODELELECTROMAGNETIC MODELELECTROMAGNETIC MODELELECTROMAGNETIC MODEL

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
Permeance/ MMFPermeance/ MMFPermeance/ MMFPermeance/ MMF SubdomainSubdomainSubdomainSubdomain FEMMFEMMFEMMFEMM
Calculation time ++ + --
Overall accuracy - + +
Tangential field calculation No* Yes Yes
Robustness to geometry + + ++
Skewing Yes Yes Yes
Eccentricities & uneven airgap Yes No No
Saturation + - ++
Faults (e.g. short circuits, broken bar, demagnetization)
Yes No* No*
Topologies BPMSMSPMSMSCIM
SCIM (no-load)SPMSMIPMSM
all
Preferred model for fast vibroacoustic analysis in healthy
variable speed operation
*can be modelled but not included yet in MANATEE

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
Model hybridation is possible in MANATEE such as
• Calculation of mmf using non-linear FEMM (e.g. rotor mmf for interior magnet machines)
• Calculation of permeance using non-linear FEMM (e.g. saturation effects, notch effects, magnetic wedges)
Recommended models in symmetrical healthy case:
Permeance/mmf
SCIM SPMSM IPMSM BPMSM
Subdomain Hybrid (Permance/mmf with rotor mmf
calculation under FEMM)
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
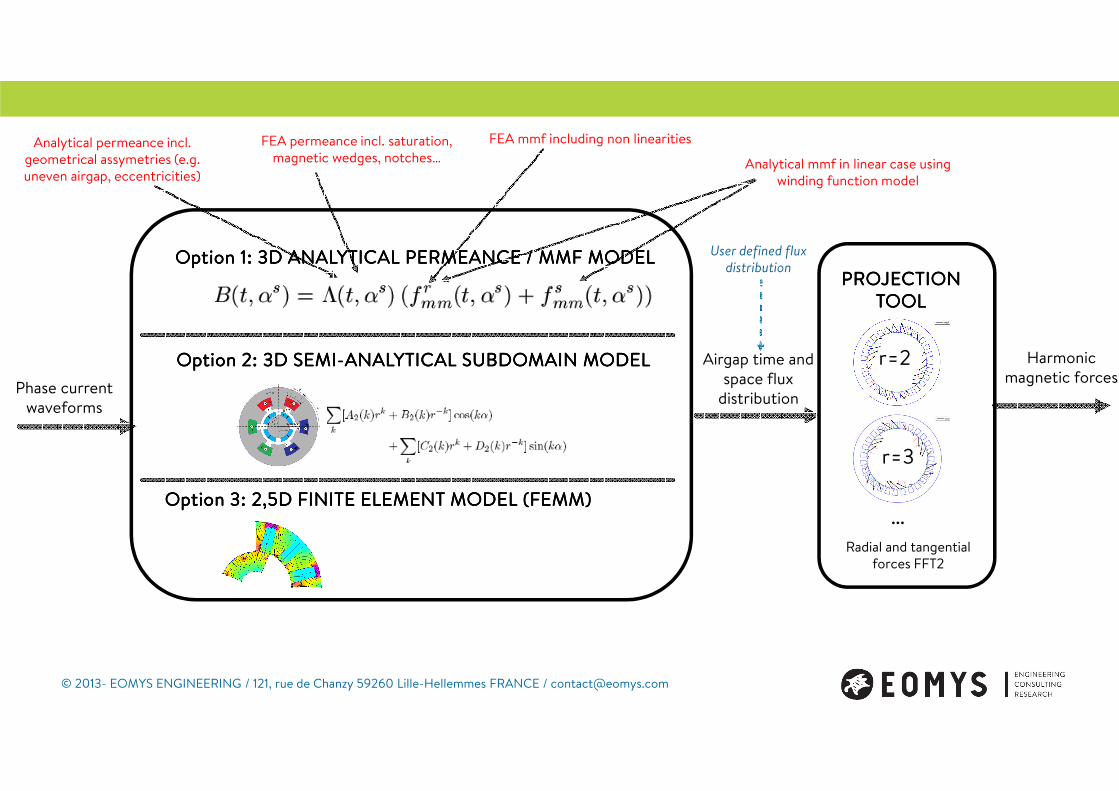
Option 1: Option 1: Option 1: Option 1: 3333D ANALYTICAL PERMEANCE / MMF MODELD ANALYTICAL PERMEANCE / MMF MODELD ANALYTICAL PERMEANCE / MMF MODELD ANALYTICAL PERMEANCE / MMF MODEL User defined flux
distribution
Phase current waveforms
Option 2: Option 2: Option 2: Option 2: 3333D SEMID SEMID SEMID SEMI----ANALYTICAL SUBDOMAIN MODELANALYTICAL SUBDOMAIN MODELANALYTICAL SUBDOMAIN MODELANALYTICAL SUBDOMAIN MODEL
Option 3: 2,5D FINITE ELEMENT MODEL (FEMM)Option 3: 2,5D FINITE ELEMENT MODEL (FEMM)Option 3: 2,5D FINITE ELEMENT MODEL (FEMM)Option 3: 2,5D FINITE ELEMENT MODEL (FEMM)
Analytical mmf in linear case using winding function model
Analytical permeance incl. geometrical assymetries (e.g. uneven airgap, eccentricities)
FEA permeance incl. saturation, magnetic wedges, notches…
Harmonic magnetic forces
Airgap time and space flux distribution
PROJECTION PROJECTION PROJECTION PROJECTION TOOLTOOLTOOLTOOL
Radial and tangential forces FFT2
r=2
r=3
…
FEA mmf including non linearities

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
• The electromagnetic model includes fast AC winding design tools suitable for any type of winding (overlapping, non-overlapping, integral or fractional)
11
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18curvilinear abscissa [m]
Stator windings distribution (τ=1.2)
R
S
T
0 1 2 3 4 5 6
-20
0
20
mechanical angle αs [rad]
Stator winding functions (τ=1.2) at t=0 s
R-phase WF
S-phase WF
T-phase WF
total mmf
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8curvilinear abscissa [m]
Stator windings distribution (τ=6)
R
S
T
0 1 2 3 4 5 6
-5
0
5
mechanical angle αs [rad]
Stator winding functions (τ=6) at t=0 s
R-phase WF
S-phase WF
T-phase WF
total mmf

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
0 0.05 0.1 0.15mechanical position along airgap in trigonometric direction [m]
Stator windings distribution (τ=1/1.2)
R
S
T
0 1 2 3 4 5 6
-20
0
20
mechanical angle αs [rad]
Stator winding functions at t=0 s
R-phase WF
S-phase WF
T-phase WF
total mmf
0 0.05 0.1 0.15mechanical position along airgap in trigonometric direction [m]
Stator windings distribution (τ=1/1.2)
R
S
T
0 1 2 3 4 5 6
-50
0
50
mechanical angle αs [rad]
Stator winding functions at t=0 s
R-phase WF
S-phase WF
T-phase WF
total mmf
Example of all teeth wound Vs alternate teeth wound mmf harmonic content
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
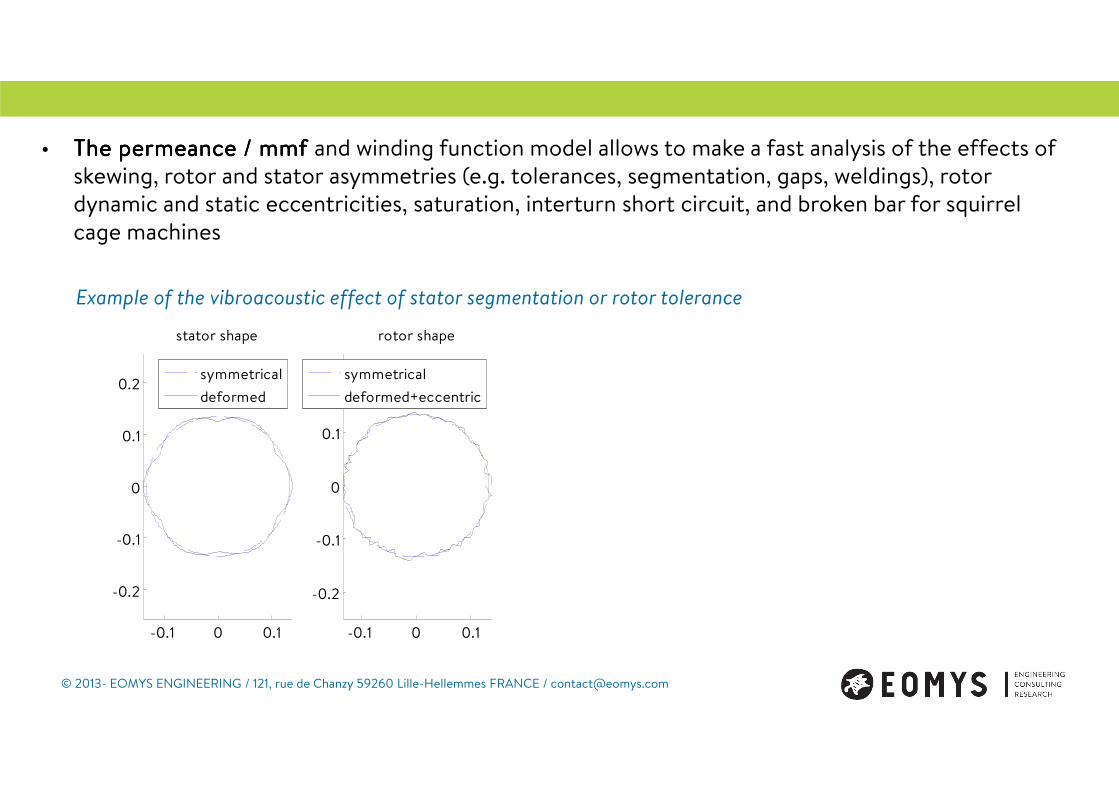
• The The The The permeancepermeancepermeancepermeance / / / / mmfmmfmmfmmf and winding function model allows to make a fast analysis of the effects of skewing, rotor and stator asymmetries (e.g. tolerances, segmentation, gaps, weldings), rotor dynamic and static eccentricities, saturation, interturn short circuit, and broken bar for squirrel cage machines
-0.1 0 0.1
-0.2
-0.1
0
0.1
0.2
stator shape
symmetrical
deformed
-0.1 0 0.1
-0.2
-0.1
0
0.1
0.2
rotor shape
symmetrical
deformed+eccentric
Example of the vibroacoustic effect of stator segmentation or rotor tolerance
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
0 1 2 3 4 5 6 7-1
-0.5
0
0.5
1
angle [rad]
airgap
rad
ial flux de
nsity [T]
with saturation
without saturation
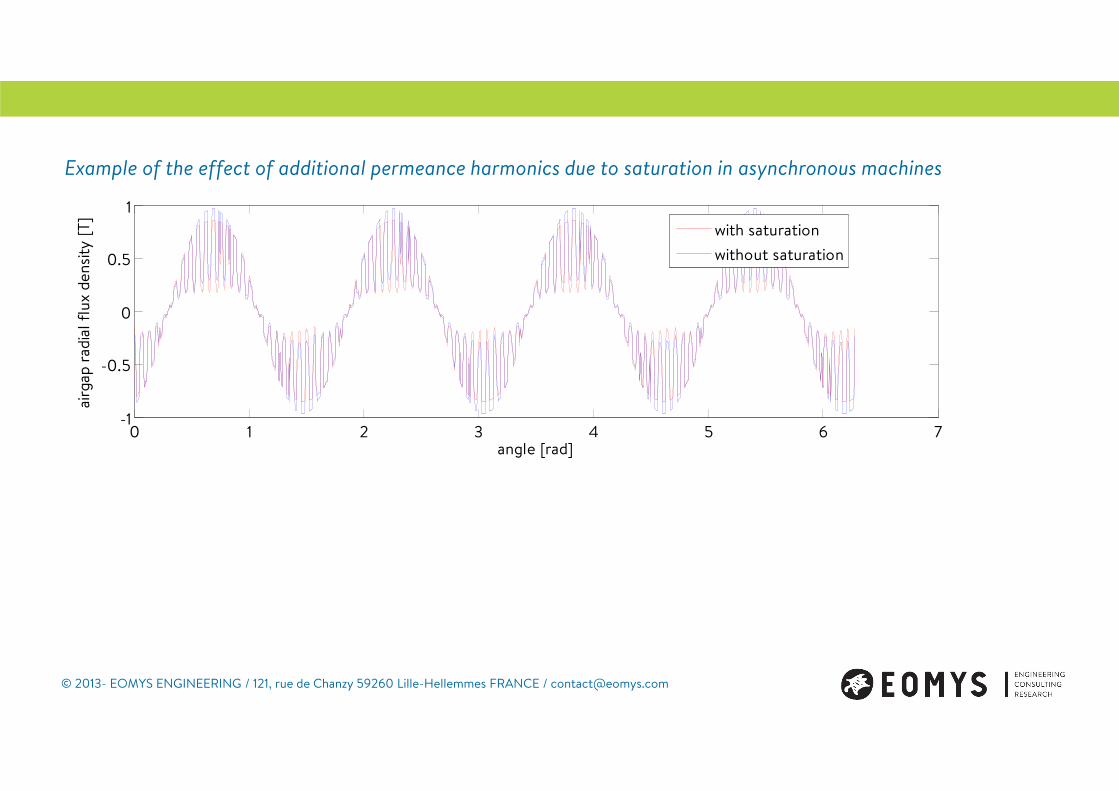
Example of the effect of additional permeance harmonics due to saturation in asynchronous machines

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
Sound Power Level at variable speedCase of a squirrel cage induction machine Zr=96 Zs=84 p=4
Frequency f=fs(Zr/p+2)Order r=Zr-Zs+2p=-4
Frequency f=fs(Zr/p+4)Order r=Zr-Zs+4p=+4
WITHOUT SATURATION
WITH SATURATION
VARIABLE SPEED NOISE CALCULATED IN 1 secVARIABLE SPEED NOISE CALCULATED IN 1 secVARIABLE SPEED NOISE CALCULATED IN 1 secVARIABLE SPEED NOISE CALCULATED IN 1 sec
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
0 200 400 600 800 10000
20
40
60
80
100
120
Frequency [Hz]
Acc
eleration leve
l [dB
Re 1e-6 m
/s2 ]
Radial acceleration spectum
0 200 400 600 800 10000
20
40
60
80
100
120
Frequency [Hz]
Acc
eleration leve
l [dB
Re 1e-6 m
/s2 ]
Radial acceleration spectum
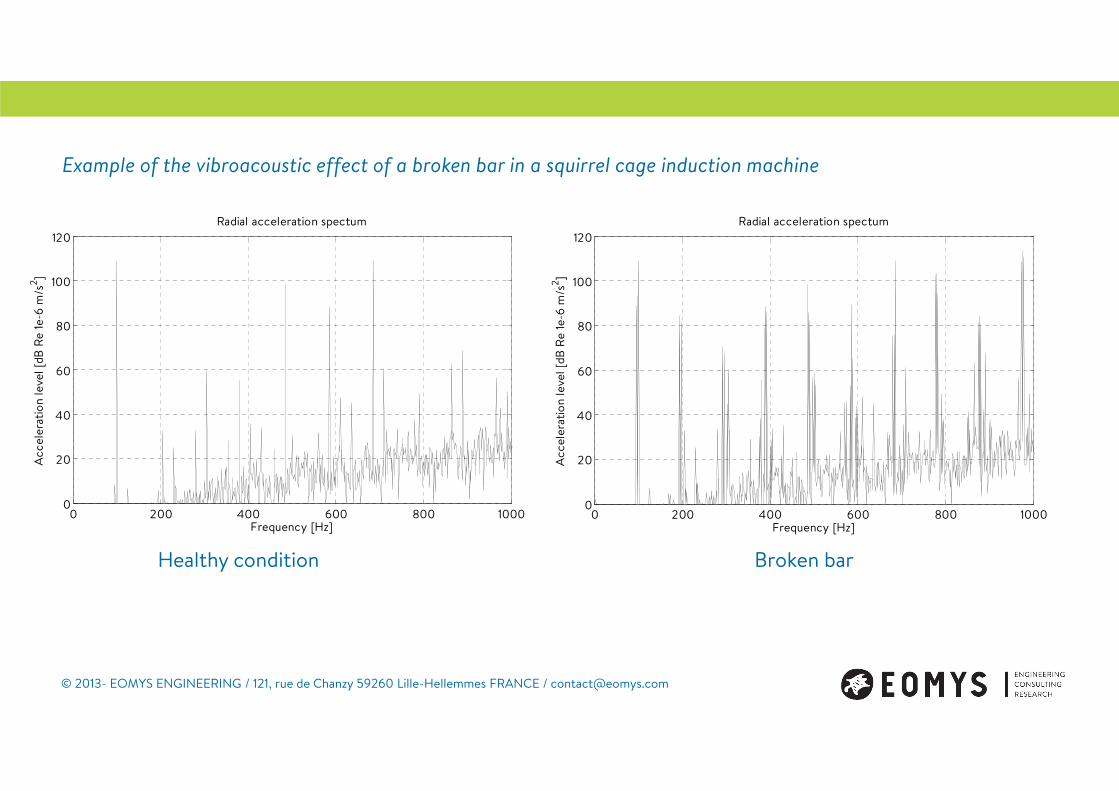
Healthy condition Broken bar
Example of the vibroacoustic effect of a broken bar in a squirrel cage induction machine

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
Example of the vibroacoustic effect of an interturn short circuit
New noise & vibration line

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
Example of the vibroacoustic effect of magnetic wedges using permance /mmf model and coupling with FEMM

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
Example of the effect of skew of rotor slots (or stator slot) on the maximum acoustic noise level
0 0.5 1 1.5 250
60
70
80
90
100
110
rotor skew pitch in stator slot pitch
soun
d po
wer le
vel (dB
A)
This sensitivity study is done on the maximum noise level at variable speed as a function of the rotor skew angle. Its calculation takes less than 2 min.

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
• High accuracy and fast subdomain model for synchronous machine:
20
• Automatic coupling with FEMM finite element software (symmetries, boundary conditions) in order to model more complex problems (e.g. shaped magnets, saturation effects)
Finite element linear
magnetostatics (FEMM)
5 min
MANATEE subdomain models
0.1 s
spacetimetime
space
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
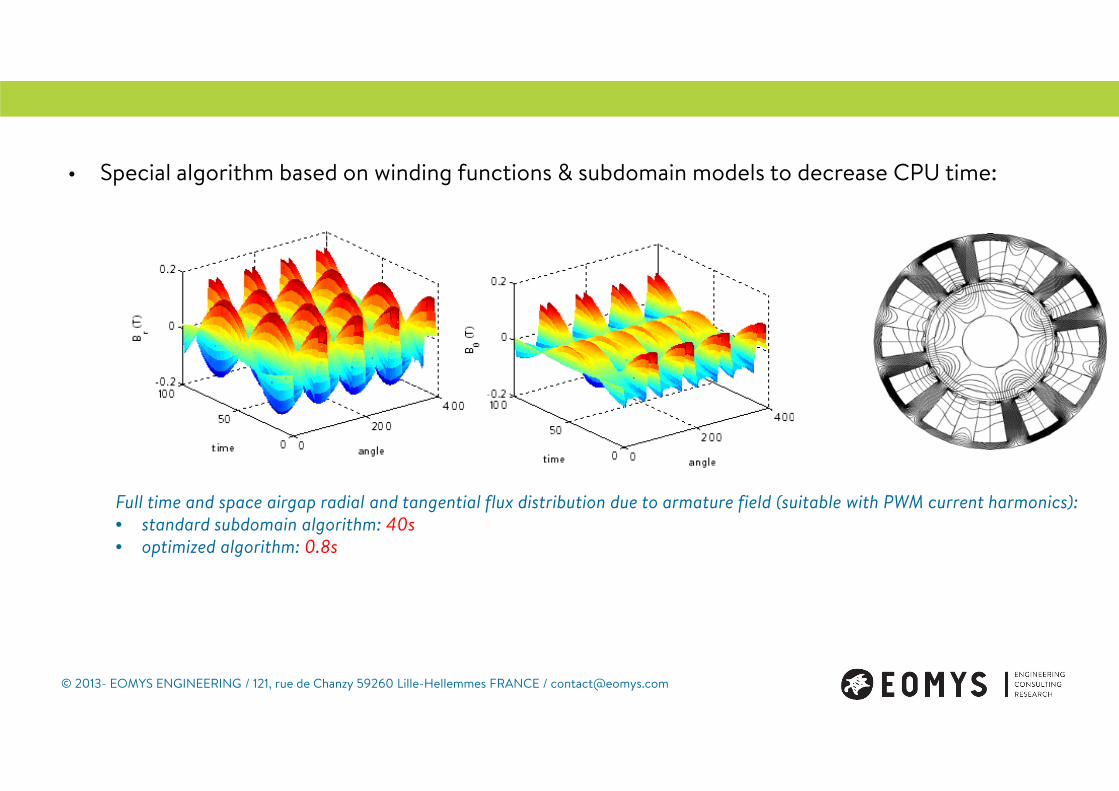
• Special algorithm based on winding functions & subdomain models to decrease CPU time:
21
Full time and space airgap radial and tangential flux distribution due to armature field (suitable with PWM current harmonics):
• standard subdomain algorithm: 40s
• optimized algorithm: 0.8s
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
S=Enveloppe fermée
Dynamic radial deflections
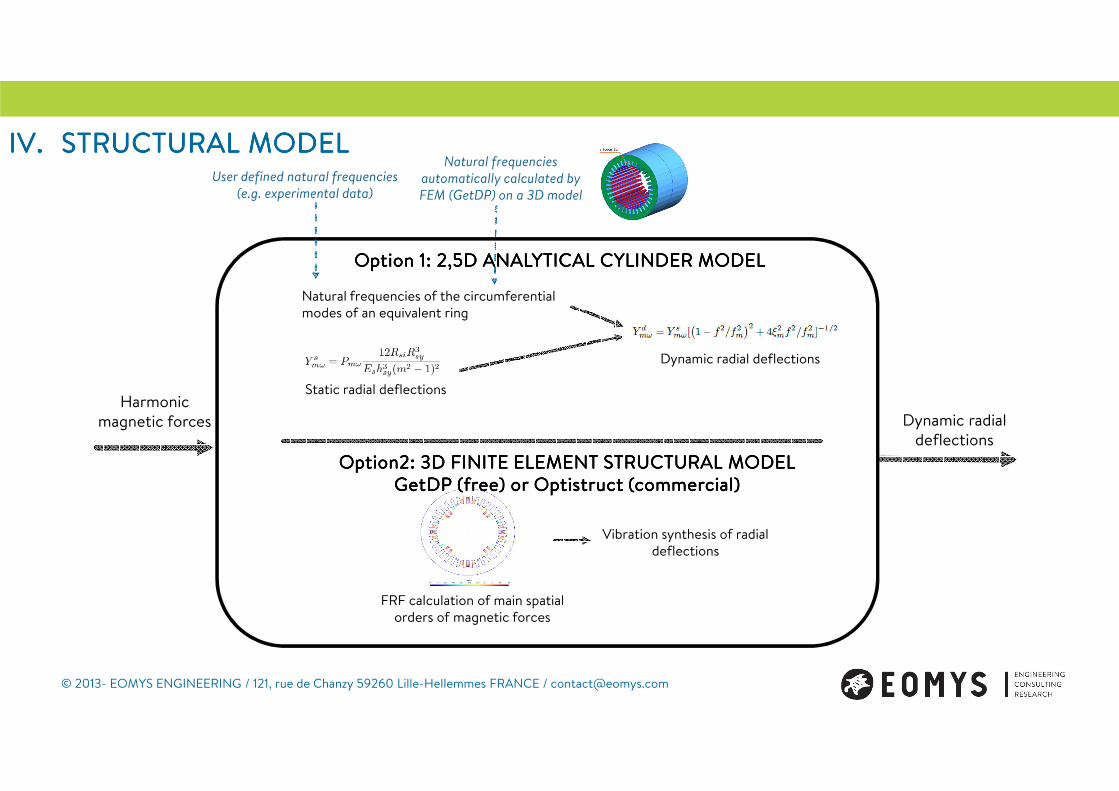
Option 1: 2,5D Option 1: 2,5D Option 1: 2,5D Option 1: 2,5D ANALYTICAL CYLINDER ANALYTICAL CYLINDER ANALYTICAL CYLINDER ANALYTICAL CYLINDER MODELMODELMODELMODEL
Static radial deflections
Natural frequencies of the circumferentialmodes of an equivalent ring
User defined natural frequencies
(e.g. experimental data)
Natural frequencies
automatically calculated by
FEM (GetDP) on a 3D model
FRF calculation of main spatial orders of magnetic forces
Dynamic radial deflections
Vibration synthesis of radial deflections
Option2: 3D FINITE ELEMENT STRUCTURAL MODEL Option2: 3D FINITE ELEMENT STRUCTURAL MODEL Option2: 3D FINITE ELEMENT STRUCTURAL MODEL Option2: 3D FINITE ELEMENT STRUCTURAL MODEL GetDP (free) or Optistruct (commercial)GetDP (free) or Optistruct (commercial)GetDP (free) or Optistruct (commercial)GetDP (free) or Optistruct (commercial)
Harmonic magnetic forces
IV.IV.IV.IV. STRUCTURAL MODELSTRUCTURAL MODELSTRUCTURAL MODELSTRUCTURAL MODEL
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
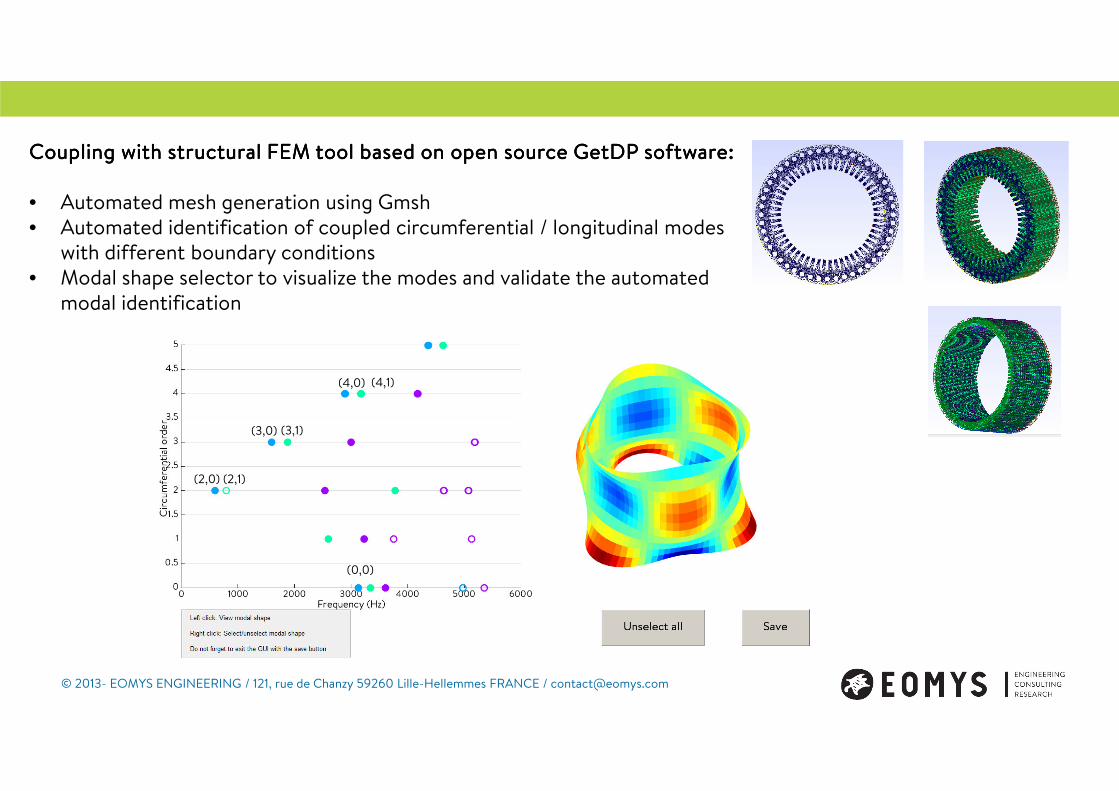
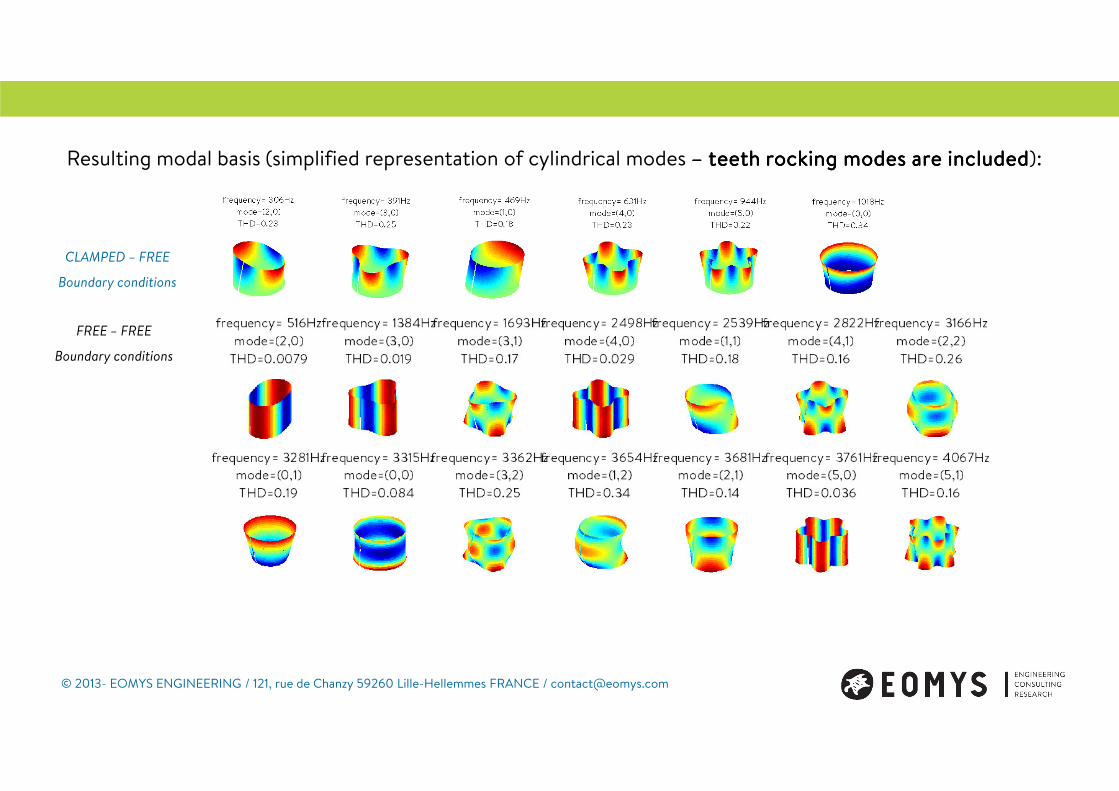
CouplingCouplingCouplingCoupling withwithwithwith structural FEM structural FEM structural FEM structural FEM tooltooltooltool basedbasedbasedbased on open source GetDP software:on open source GetDP software:on open source GetDP software:on open source GetDP software:
• Automated mesh generation using Gmsh• Automated identification of coupled circumferential / longitudinal modes
with different boundary conditions• Modal shape selector to visualize the modes and validate the automated
modal identification
(2,0)
(3,0)
(4,0)
(0,0)
(2,1)
(3,1)
(4,1)

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
CouplingCouplingCouplingCoupling withwithwithwith structural FEM structural FEM structural FEM structural FEM tooltooltooltool Altair Optistruct:Altair Optistruct:Altair Optistruct:Altair Optistruct:
• circular lamination with any slot geometry (possibility to simplify the slot geometry to have a lighter structural model)
• application of physics: orthotropic properties, winding mass• application of boundary conditions (e.g. clamped/clamped,
free/clamped, fixed nodes)• meshing based on the number of nodes in the different regions• modal basis solver set-up• vibration synthesis post processing
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
CLAMPED – FREE
Boundary conditions
FREE – FREE
Boundary conditions
Resulting modal basis (simplified representation of cylindrical modes –––– teeth rocking modes are includedteeth rocking modes are includedteeth rocking modes are includedteeth rocking modes are included):

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
Dynamic radial deflections
ANALYTICAL ACOUSTIC MODELANALYTICAL ACOUSTIC MODELANALYTICAL ACOUSTIC MODELANALYTICAL ACOUSTIC MODEL
Radiation efficiency of an equivalent cylinder
V. ACOUSTIC MODELV. ACOUSTIC MODELV. ACOUSTIC MODELV. ACOUSTIC MODEL
Sound power levelSound pressure level
2D (analytical) or 3D (GetDP) spatial-averagedvibration velocity

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
VI. VI. VI. VI. ADVANTAGESADVANTAGESADVANTAGESADVANTAGES
• Fast variable speed vibroacoustic calculation (from <1 sec to 1 Fast variable speed vibroacoustic calculation (from <1 sec to 1 Fast variable speed vibroacoustic calculation (from <1 sec to 1 Fast variable speed vibroacoustic calculation (from <1 sec to 1 mnmnmnmn)))) based on efficient calculation methods even with 3D effects and converter harmonics
• High frequency High frequency High frequency High frequency acoustic calculations (up to 20 kHz) within seconds, contrary to numerical approaches
• Several industrial validations industrial validations industrial validations industrial validations of the vibroacoustic model
• Automatic Automatic Automatic Automatic vibroacousticvibroacousticvibroacousticvibroacoustic analysis analysis analysis analysis (identification of main exciting forces)
• AdvancedAdvancedAdvancedAdvanced harmonic postharmonic postharmonic postharmonic post----processingsprocessingsprocessingsprocessings to understand the root cause of acoustic noise and find design improvements
• Possibility of decoupling electromagnetics & structural mechanics to perform vibro-acoustic optimization (pole shaping, current injection)
27
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
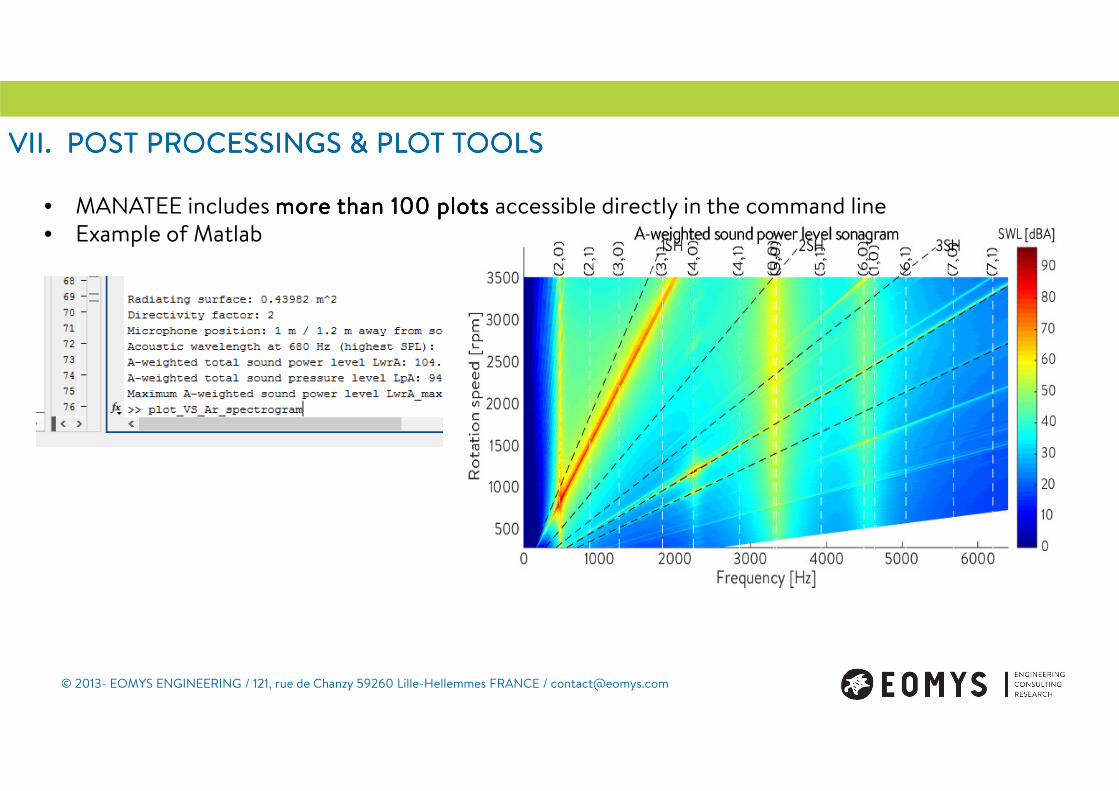
VII. POST PROCESSINGS & PLOT TOOLSVII. POST PROCESSINGS & PLOT TOOLSVII. POST PROCESSINGS & PLOT TOOLSVII. POST PROCESSINGS & PLOT TOOLS
28
• MANATEE includes more more more more thanthanthanthan 100 plots100 plots100 plots100 plots accessible directly in the command line• Example of Matlab

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
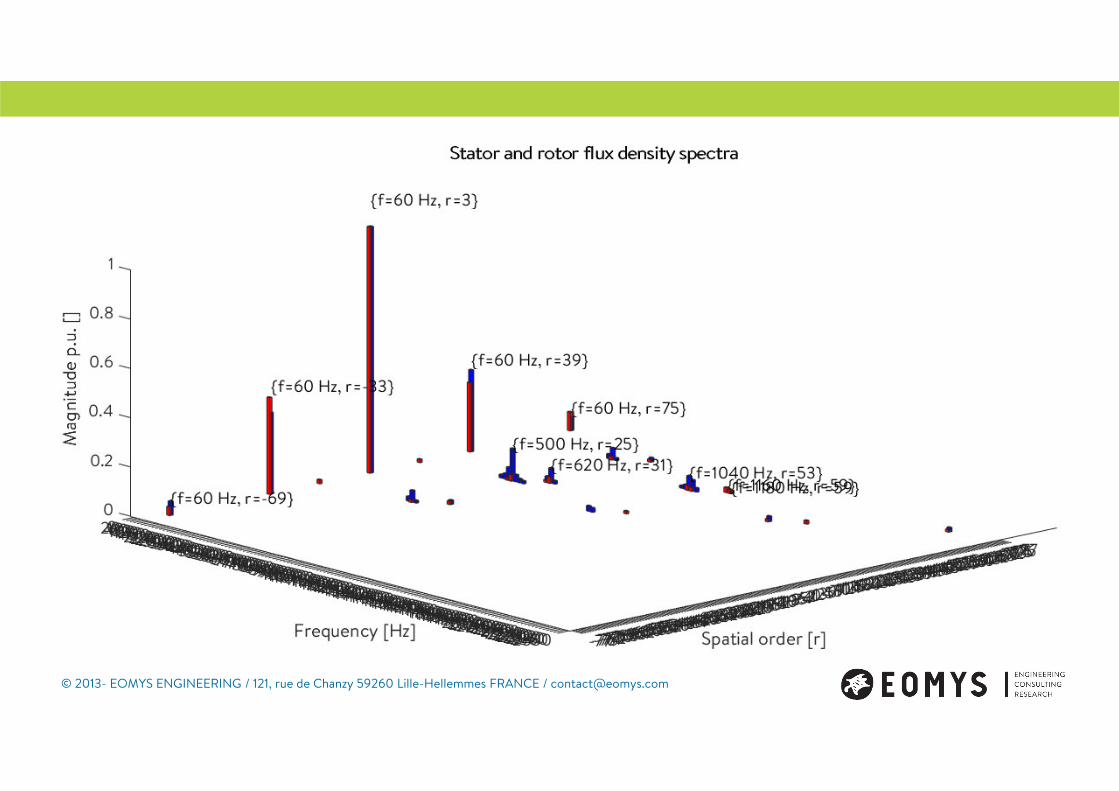
Geometry, time and space visualization, real and complex spectra for all quantities (permeance, mmf, radial and tangential flux density, force, acceleration, velocity, displacement)
0 100 200 300 4000
1
2x 10
6
Angle [°]
Mag
nitude
[N/m
2 ]
Airgap radial force at t = 0 s as a function of space
0 20 40 600
1
2
3x 10
5
Mag
nitude
[N/m
2]
Space harmonic []
Airgap radial forcee force FFT over space
-2000
0
2000 -1000
1000
0.5
1
1.5
Spatial order [r]Frequency [Hz]
Mag
nitude
[T]

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
Visual fitting tool for B(H) curve model at high excitation field

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
Magnetic harmonic forces analysis with automated identification of lines expression
-8-7-6-5-4-3
-2-101 2 3 45 6 7 8
1000
2000
30000
5000
10000
15000
f=4fs=382 Hz
r=6
f=2fs=191 Hz
r=3
spatial order [r]
f=22fs=2099 Hz
r=6 f=20fs=1908 Hz
r=3
f=5fs=453 Hz
r=-3
Airgap radial force FFT2
f=3fs=262 Hz
r=-6
f=16fs=1526 Hz
r=-3 f=14fs=1336 Hz
r=-6
Frequency [Hz]
σ r [N/m
m2]
(PMSM) (SCIM)
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
33
Magnetic harmonic forces analysis
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
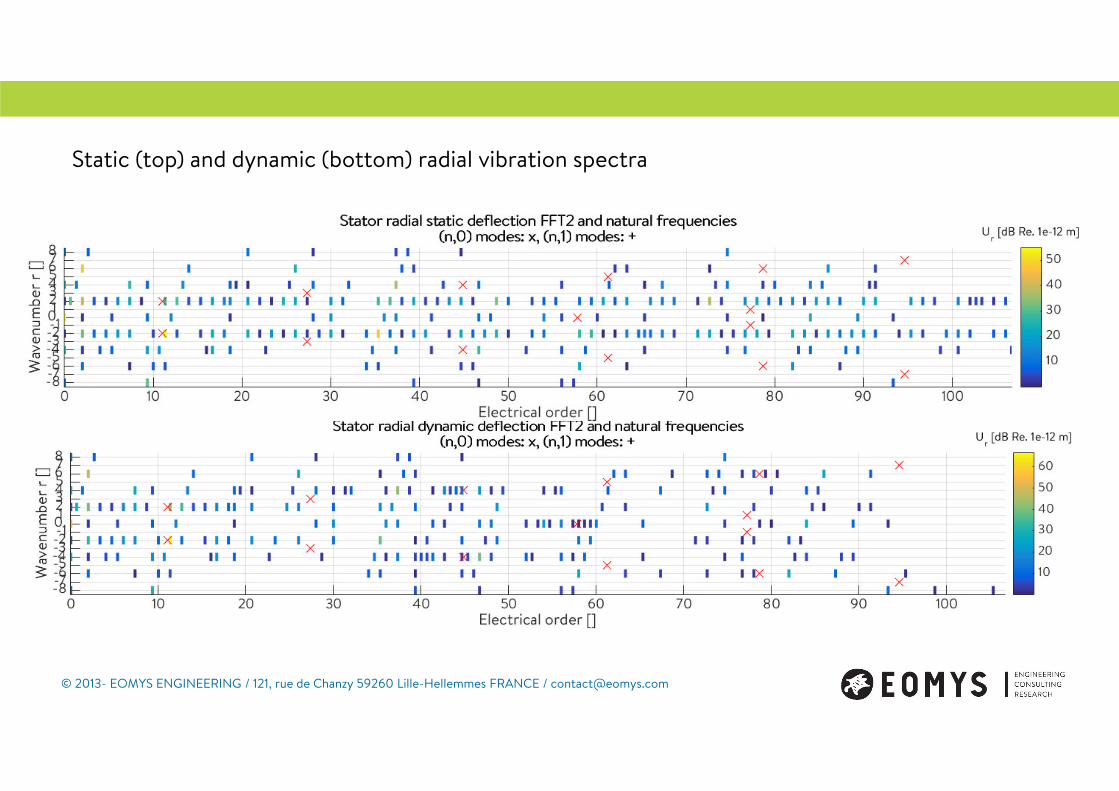
Static (top) and dynamic (bottom) radial vibration spectra

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
Spectrogram of radial / tangential force harmonics for each spatial wavenumber

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
Spectrogram of radial / tangential force harmonics of a given order, including rotation direction
Operational deflection shapes at a given frequency
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
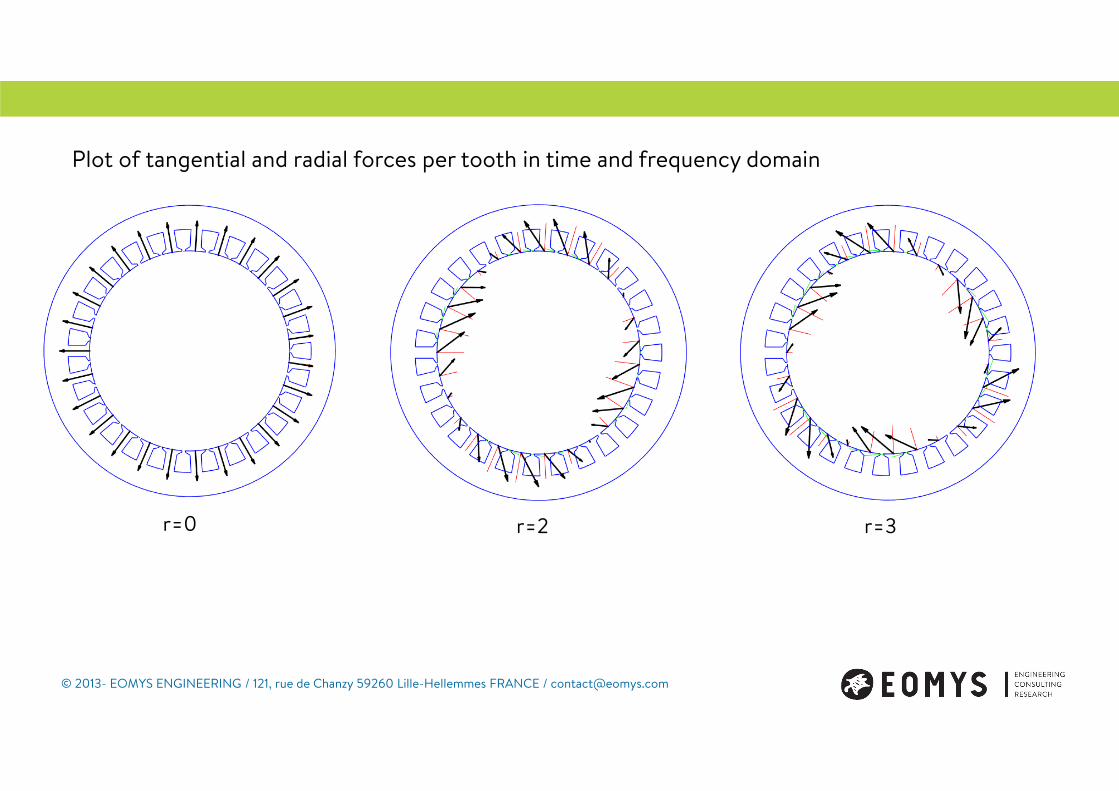
Plot of tangential and radial forces per tooth in time and frequency domain
r=0 r=2 r=3

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
Possibility to visualize the modal basis under Gmsh (freeware)

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
Modal contribution to acoustic and vibration spectra

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
Contribution of each structural mode to the acoustic noise at variable speed
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
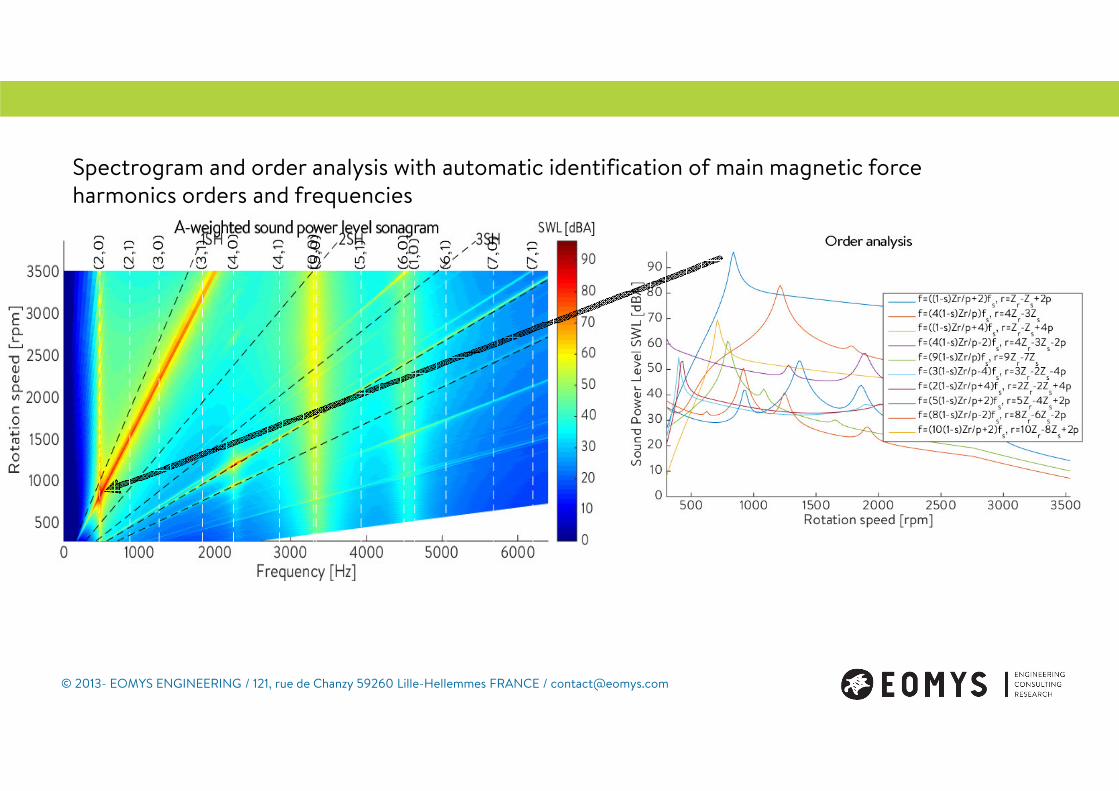
Spectrogram and order analysis with automatic identification of main magnetic force harmonics orders and frequencies
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
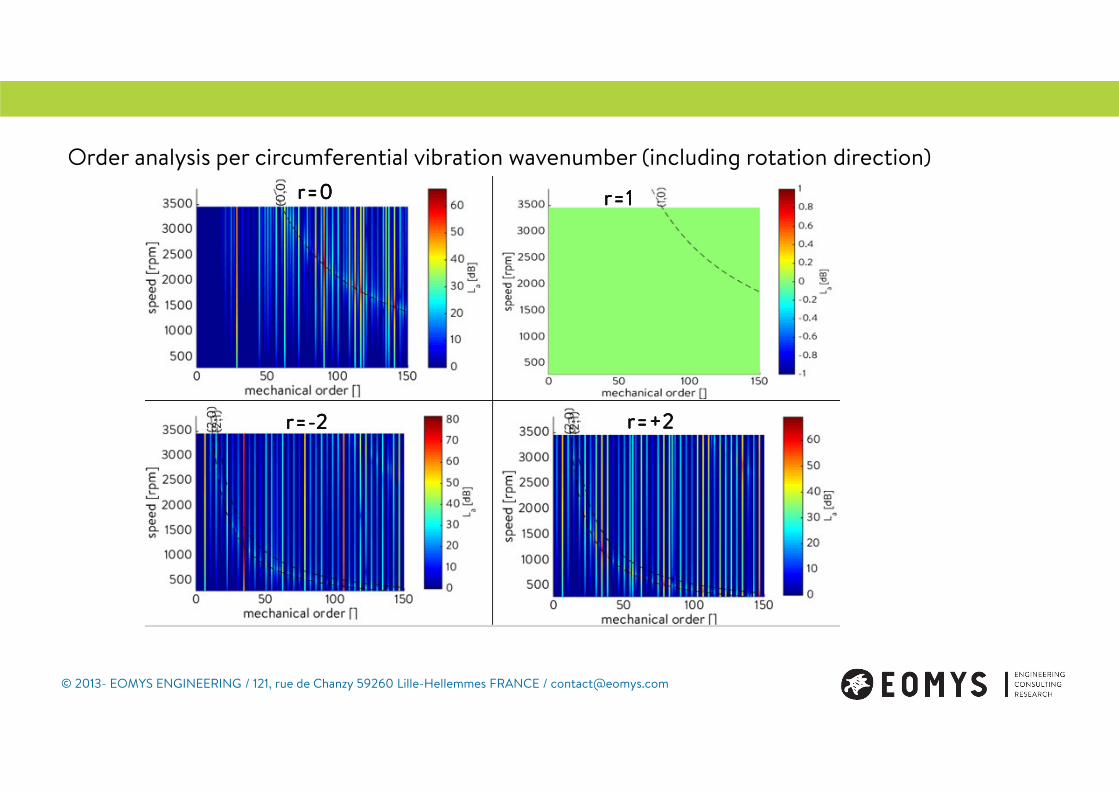
Order analysis per circumferential vibration wavenumber (including rotation direction)
rrrr=0=0=0=0 r=1r=1r=1r=1
r=+2r=+2r=+2r=+2r=r=r=r=----2222
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
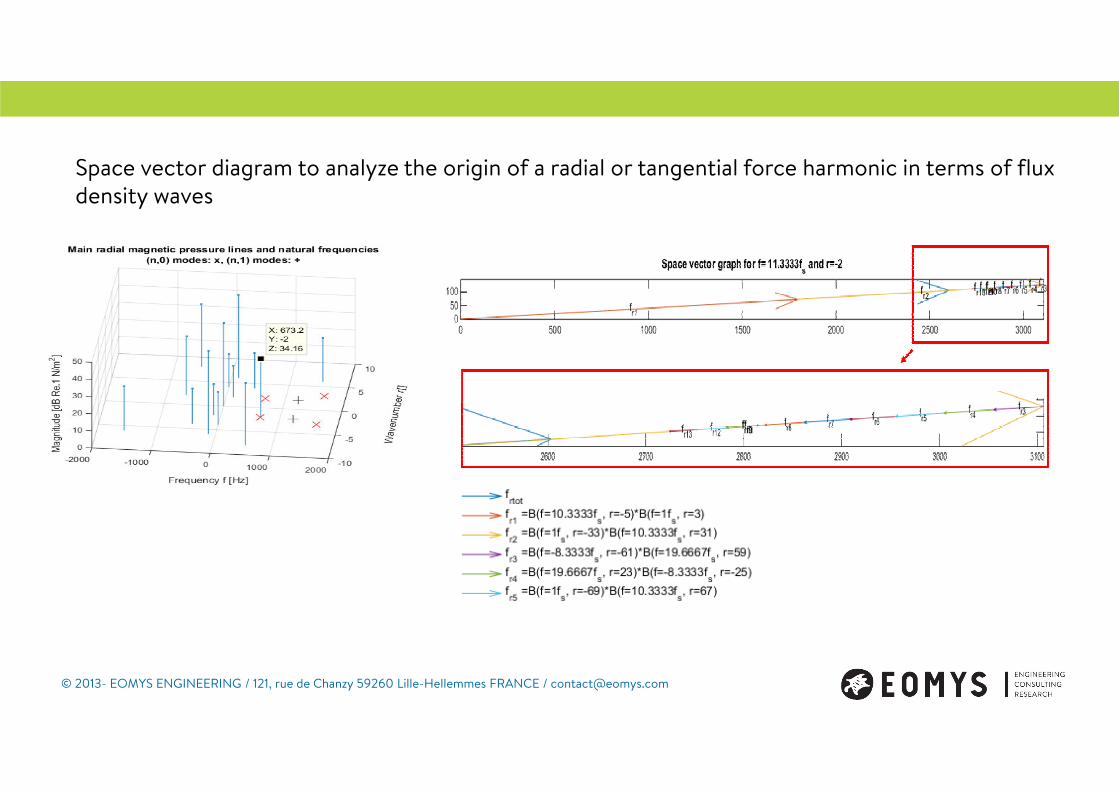
Space vector diagram to analyze the origin of a radial or tangential force harmonic in terms of flux density waves
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
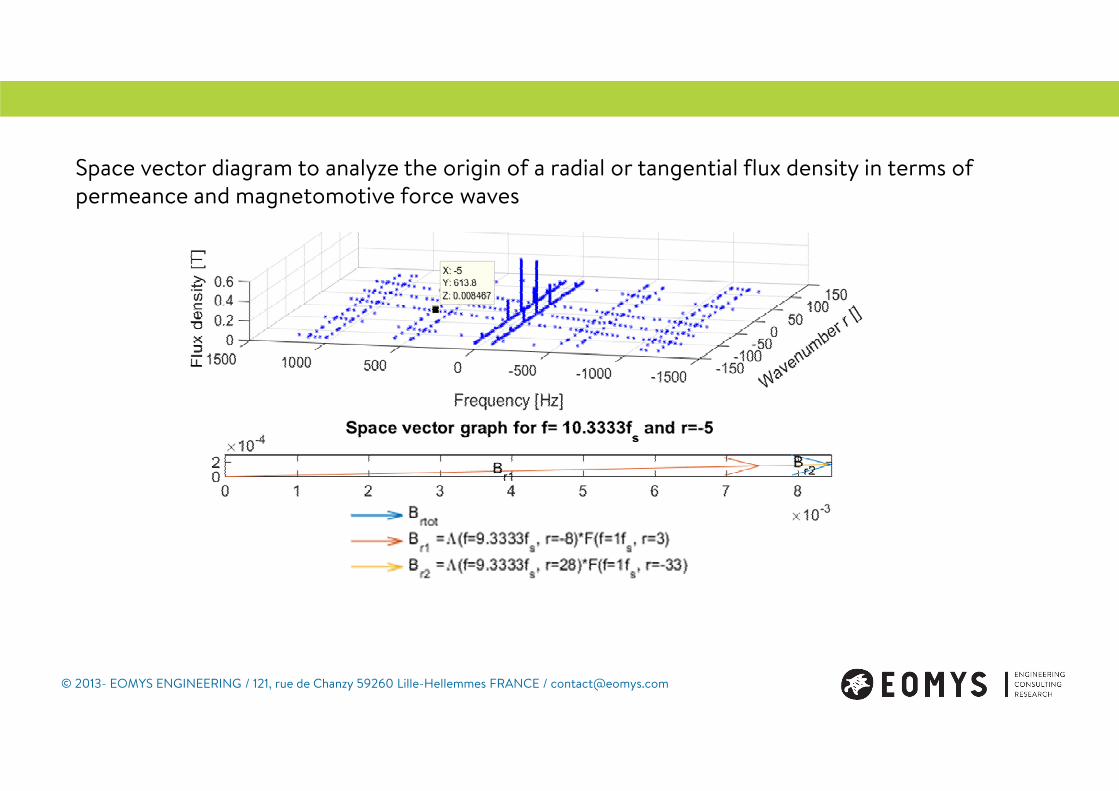
Space vector diagram to analyze the origin of a radial or tangential flux density in terms of permeance and magnetomotive force waves
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
0 100 200 300
-250
-200
-150
-100
-50
0
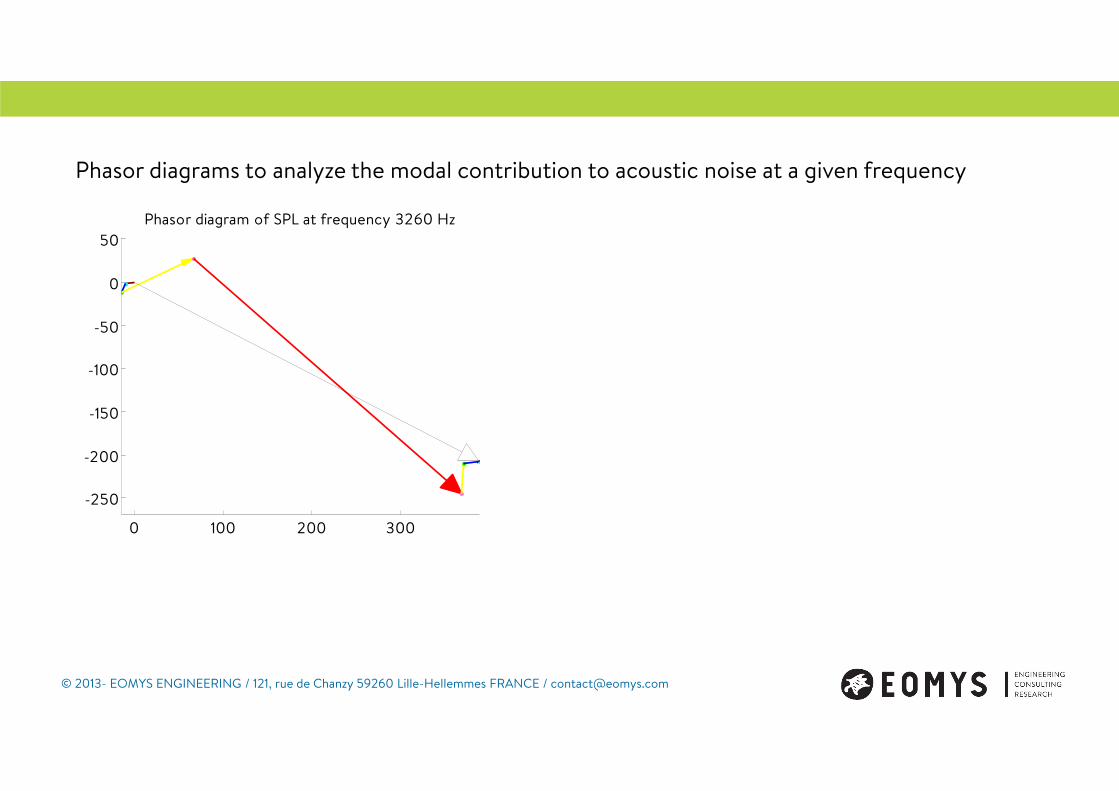
50Phasor diagram of SPL at frequency 3260 Hz
Phasor diagrams to analyze the modal contribution to acoustic noise at a given frequency

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
Unbalanced magnetic pull calculation (example of the slotting effect on eccentric UMP including skew of the stator)
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
0 2000 4000 600050
100
150
200
250 2-th
3-th
4-th
Frequency [Hz]
Supp
ly frequ
ency
[Hz]
SPL [dBA]
0
10
20
30
40
50
60
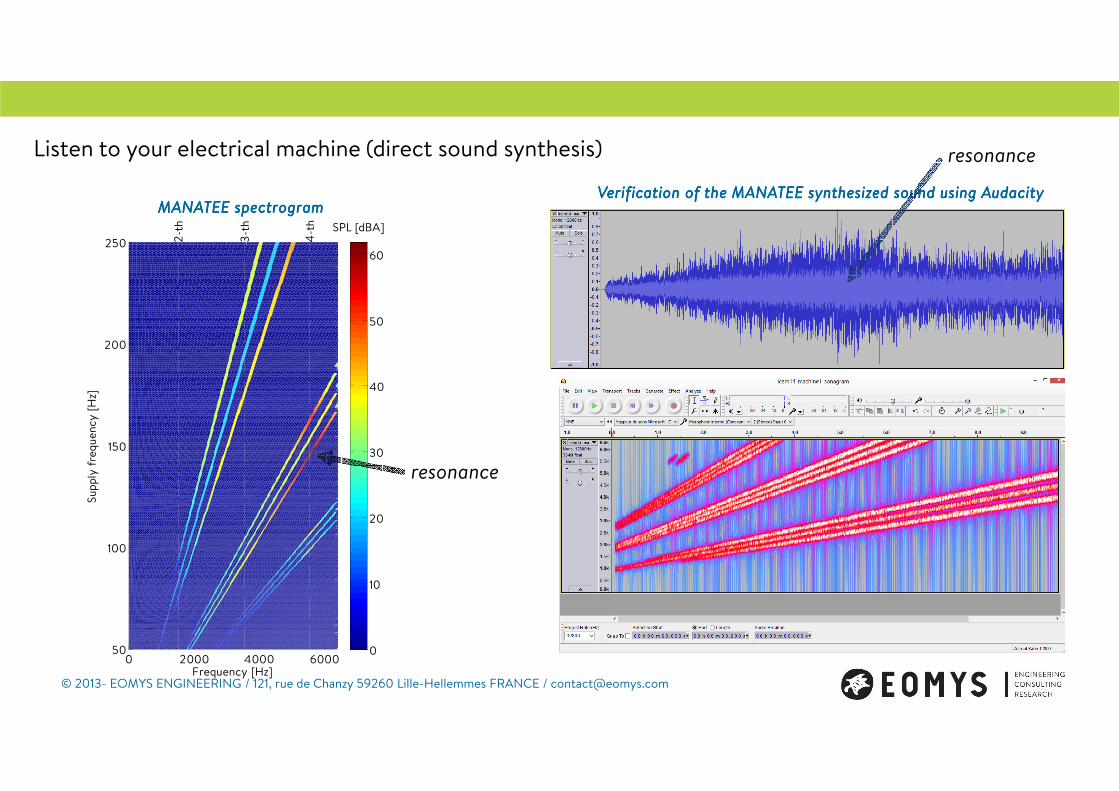
Listen to your electrical machine (direct sound synthesis)
VerificationVerificationVerificationVerification of the MANATEE of the MANATEE of the MANATEE of the MANATEE synthesizedsynthesizedsynthesizedsynthesized soundsoundsoundsound usingusingusingusing AudacityAudacityAudacityAudacityMANATEE spectrogramMANATEE spectrogramMANATEE spectrogramMANATEE spectrogram
resonance
resonance
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
is_mmfs
is_ideal_mmfs
is_mmfr
is_ideal_mmfr
is_slotS
is_slotR
LwrA
LwrA_max
ismmfs
dealmmfs
ismmfr
dealmmfr
isslotS
isslotR
LwrA
LwrA
max
corr factor
0
0.2
0.4
0.6
0.8
1
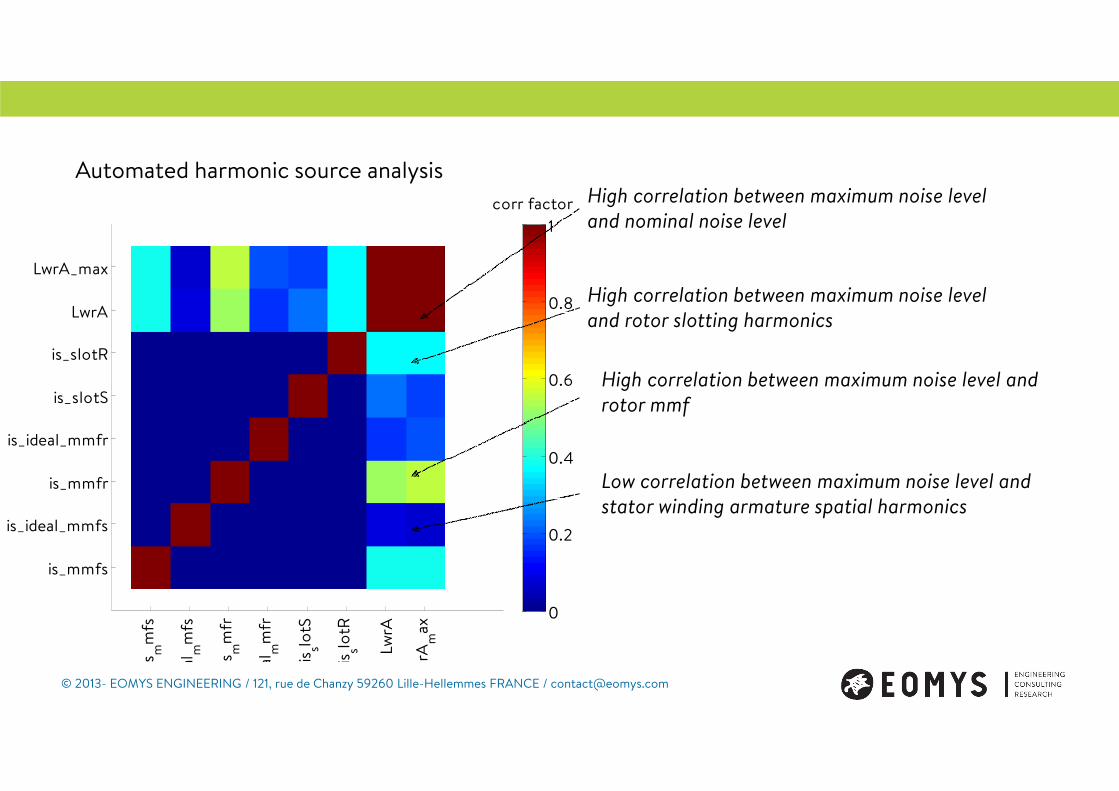
Automated harmonic source analysis
High correlation between maximum noise level
and rotor slotting harmonics
High correlation between maximum noise level and
rotor mmf
Low correlation between maximum noise level and
stator winding armature spatial harmonics
High correlation between maximum noise level
and nominal noise level

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
VIII. VIII. VIII. VIII. VALIDATIONSVALIDATIONSVALIDATIONSVALIDATIONS AND AND AND AND DOCUMENTATIONDOCUMENTATIONDOCUMENTATIONDOCUMENTATION
49
• A full website is dedicated to MANATEE validations, post-processings, and tutorials:
http://eomys.com/produits/manatee/article/logicielhttp://eomys.com/produits/manatee/article/logicielhttp://eomys.com/produits/manatee/article/logicielhttp://eomys.com/produits/manatee/article/logiciel----manatee?lang=enmanatee?lang=enmanatee?lang=enmanatee?lang=en
• All modules are validated using special validation projects which can be run and modified by the user:
>>run_MANATEE(‘EM_SPMSM_NL_001');
• Validation cases are daily tested on the current version of MANATEE
• The input and output simulation data are stored in structures and substructures which are documented in an Excel file
• Tutorials for the variable speed simulation of induction machines and PM synchronous machines
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
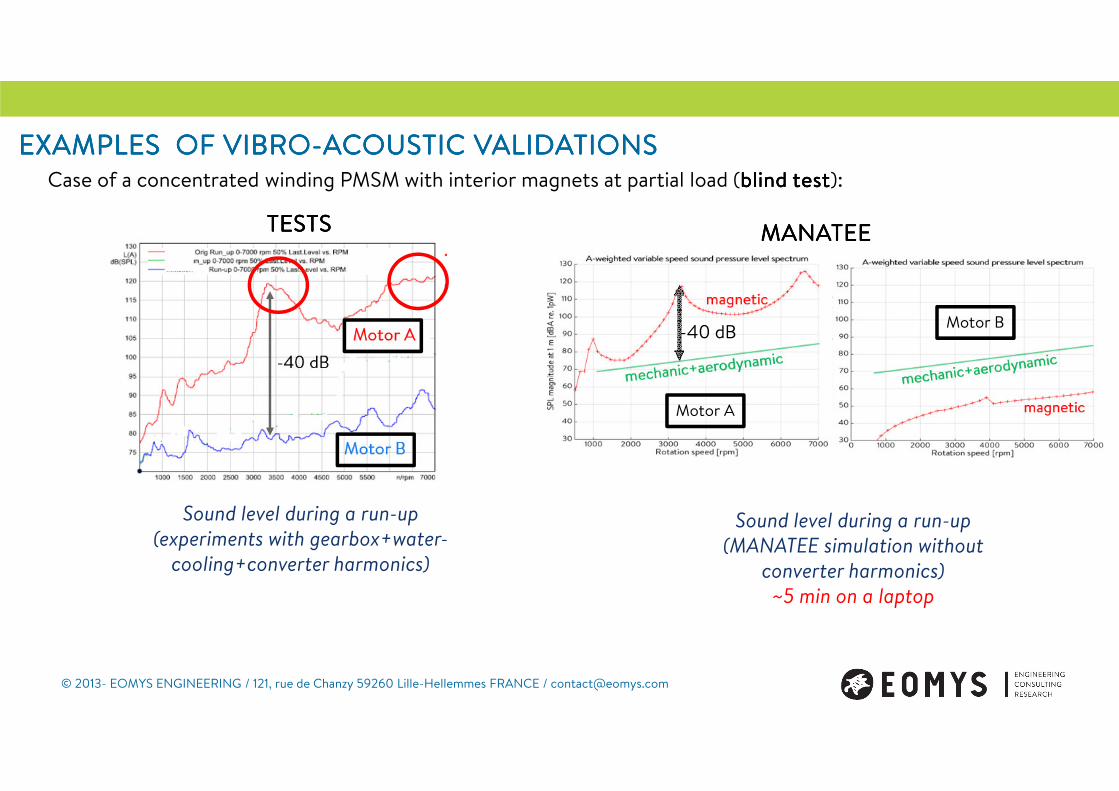
EXAMPLES OF VIBROEXAMPLES OF VIBROEXAMPLES OF VIBROEXAMPLES OF VIBRO----ACOUSTIC VALIDATIONSACOUSTIC VALIDATIONSACOUSTIC VALIDATIONSACOUSTIC VALIDATIONSCase of a concentrated winding PMSM with interior magnets at partial load (blind testblind testblind testblind test):
Sound level during a run-up
(experiments with gearbox+water-
cooling+converter harmonics)
Sound level during a run-up
(MANATEE simulation without
converter harmonics)
~5 min on a laptop
TESTSTESTSTESTSTESTS MANATEEMANATEEMANATEEMANATEE
Motor A
Motor B-40 dB

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
Case of a squirrel cage induction machine at no-load:
Sound level during a run-up
(experiments with PWM +
gearbox +air-cooling)
Sound level during a run-up
(simulation without PWM)
~2 second on a laptop
15 dB reduction were obtained after redesign with MANATEE15 dB reduction were obtained after redesign with MANATEE15 dB reduction were obtained after redesign with MANATEE15 dB reduction were obtained after redesign with MANATEE
TESTSTESTSTESTSTESTS
MANATEEMANATEEMANATEEMANATEE
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
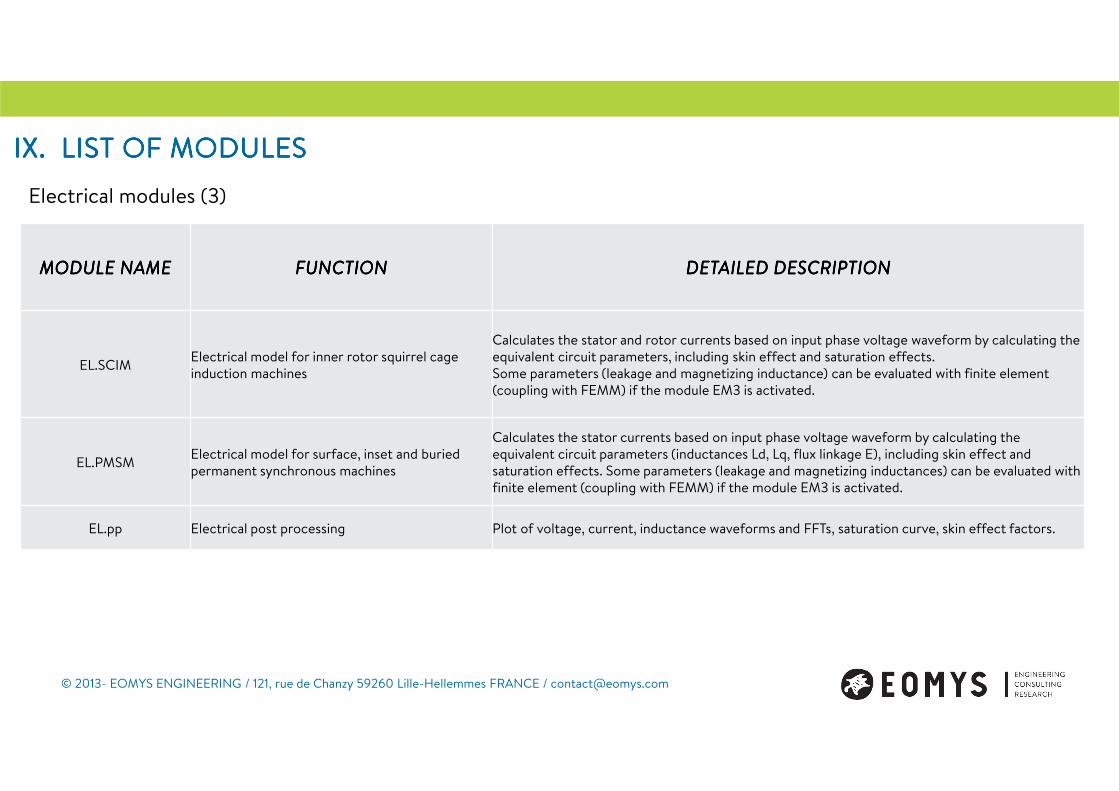
IX. LIST OF MODULESIX. LIST OF MODULESIX. LIST OF MODULESIX. LIST OF MODULES
52
MODULE NAMEMODULE NAMEMODULE NAMEMODULE NAME FUNCTIONFUNCTIONFUNCTIONFUNCTION DETAILED DESCRIPTIONDETAILED DESCRIPTIONDETAILED DESCRIPTIONDETAILED DESCRIPTION
EL.SCIMElectrical model for inner rotor squirrel cage induction machines
Calculates the stator and rotor currents based on input phase voltage waveform by calculating the equivalent circuit parameters, including skin effect and saturation effects. Some parameters (leakage and magnetizing inductance) can be evaluated with finite element (coupling with FEMM) if the module EM3 is activated.
EL.PMSMElectrical model for surface, inset and buried permanent synchronous machines
Calculates the stator currents based on input phase voltage waveform by calculating the equivalent circuit parameters (inductances Ld, Lq, flux linkage E), including skin effect and saturation effects. Some parameters (leakage and magnetizing inductances) can be evaluated with finite element (coupling with FEMM) if the module EM3 is activated.
EL.pp Electrical post processing Plot of voltage, current, inductance waveforms and FFTs, saturation curve, skin effect factors.
Electrical modules (3)

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
MODULE NAMEMODULE NAMEMODULE NAMEMODULE NAME FUNCTIONFUNCTIONFUNCTIONFUNCTION DETAILED DESCRIPTIONDETAILED DESCRIPTIONDETAILED DESCRIPTIONDETAILED DESCRIPTION
EM1.IMEM1.IMEM1.IMEM1.IMElectromagnetic analytical module based on permeance / mmf and winding functions for squirrel cage asynchronous machines
Calculates the airgap rotor and stator radial flux density time and space distribution based on permeance / mmf model. Includes rotor and stator skewing (any skew shape), uneven airgap and eccentricities effects, broken bar and short circuit effects, integral and fractional slot windings.
EM1.PMSMEM1.PMSMEM1.PMSMEM1.PMSMElectromagnetic analytical module based on permeance / mmf and winding functions for inset, surface and buried PM synchronous machines
Calculates the airgap rotor and stator radial flux density time and space distribution based on permeance / mmf model. Includes stator and rotor skew (any shape), uneven airgap, pole displacement and eccentricities effects, demagnetization and short-circuit effects, integral and fractional slot windings.
EM2.SCIMEM2.SCIMEM2.SCIMEM2.SCIMElectromagnetic semi-analytical module for inner rotor squirrel cage induction machine
Calculates the airgap rotor and stator radial and tangential flux density time and space distribution based on subdomain models. Includes armature field with any winding type and skewing effect. Assumes semi opened slots with polar geometry
EM2.SPMSMEM2.SPMSMEM2.SPMSMEM2.SPMSMElectromagnetic semi-analytical module for inner rotor surface permanent magnet machine
Calculates the airgap rotor and stator radial and tangential flux density time and space distribution based on subdomain models. Includes armature field with any winding type and skewing effect. Assumes semi opened slots with polar geometry and tile shape magnets.
EM2.IPMSMEM2.IPMSMEM2.IPMSMEM2.IPMSMElectromagnetic semi-analytical module for inner rotor inset permanent magnet machines
Calculates the airgap rotor and stator radial and tangential flux density time and space distribution based on subdomain models. Includes armature field with any winding type and skewing effect. Limited to polar geometries with semi opened slots and tile shape magnets.
EM2.BPMSMEM2.BPMSMEM2.BPMSMEM2.BPMSMElectromagnetic semi-analytical module for inner rotor buried permanent magnet machines
Calculates the airgap rotor and stator radial and tangential flux density time and space distribution based on subdomain models. Includes armature field with any winding type and skewing effect. Limited to polar geometries with semi opened slots and rectangular magnets.
Electromagnetic modules (9)

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
MODULE NAMEMODULE NAMEMODULE NAMEMODULE NAME FUNCTIONFUNCTIONFUNCTIONFUNCTION DETAILED DESCRIPTIONDETAILED DESCRIPTIONDETAILED DESCRIPTIONDETAILED DESCRIPTION
EM3.PMSMEM3.PMSMEM3.PMSMEM3.PMSMElectromagnetic finite element module for inner rotor surface, inset or buried permanent magnet synchronous machines
Couples MANATEE with open-source electromagnetic software FEMM for non linear or linear magnetostatics problem (automatic drawing, meshing and post processings - torque, flux, emf, inductances). Calculates the airgap radial and tangential flux density time and space distribution, flux linkage, leakage and magnetizing inductances.
EM.ppEM.ppEM.ppEM.pp Electromagnetic post-processor module.Post-process the airgap flux density calculation to plot mmfs, permeance, magnetic force, time and space distribution or 2D FFT.
EM3.SCIMEM3.SCIMEM3.SCIMEM3.SCIMElectromagnetic finite element module for inner rotorsquirrel cage asynchronous machines
Couples MANATEE with open-source electromagnetic software FEMM for no-load non linear or linear magnetostatics problem (automatic drawing, meshing and post processings - torque, flux, emf, inductances). Calculates the airgap radial and tangential flux density time and space distribution, flux linkage, leakage and magnetizing inductances. Includes skewing effect.
Electromagnetic modules (9)
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
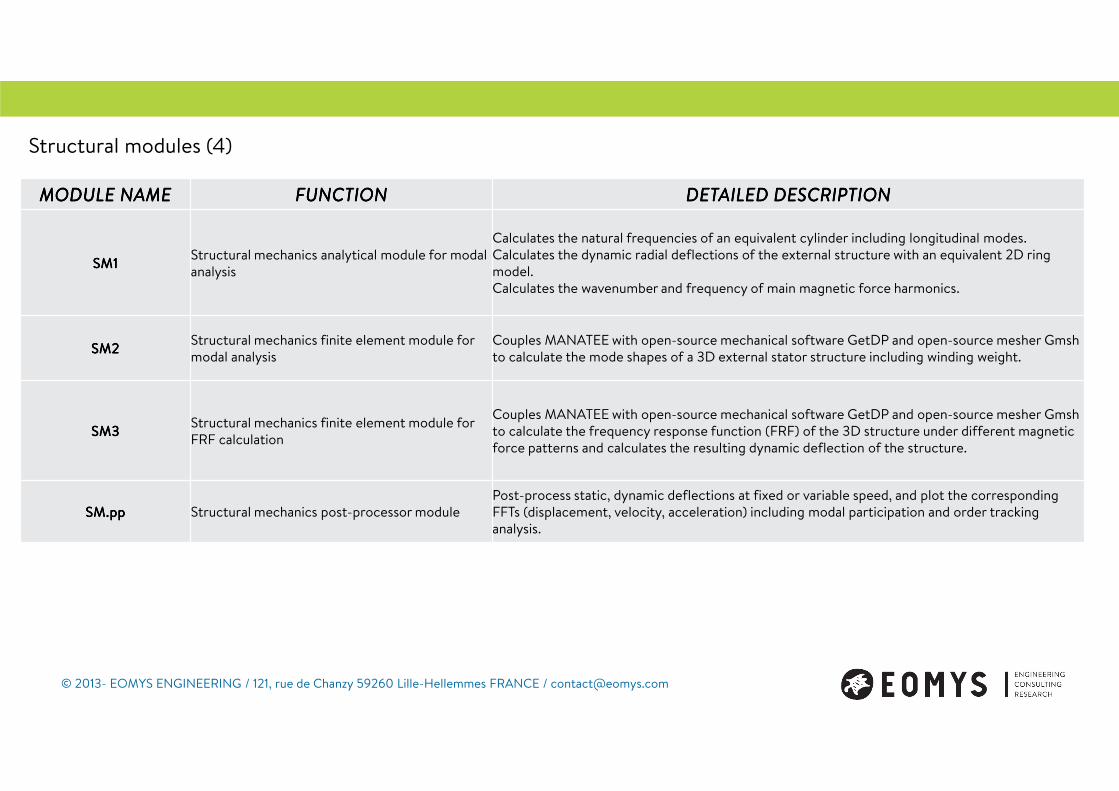
MODULE NAMEMODULE NAMEMODULE NAMEMODULE NAME FUNCTIONFUNCTIONFUNCTIONFUNCTION DETAILED DESCRIPTIONDETAILED DESCRIPTIONDETAILED DESCRIPTIONDETAILED DESCRIPTION
SM1SM1SM1SM1Structural mechanics analytical module for modal analysis
Calculates the natural frequencies of an equivalent cylinder including longitudinal modes.Calculates the dynamic radial deflections of the external structure with an equivalent 2D ring model.Calculates the wavenumber and frequency of main magnetic force harmonics.
SM2SM2SM2SM2Structural mechanics finite element module for modal analysis
Couples MANATEE with open-source mechanical software GetDP and open-source mesher Gmsh to calculate the mode shapes of a 3D external stator structure including winding weight.
SM3SM3SM3SM3Structural mechanics finite element module for FRF calculation
Couples MANATEE with open-source mechanical software GetDP and open-source mesher Gmsh to calculate the frequency response function (FRF) of the 3D structure under different magnetic force patterns and calculates the resulting dynamic deflection of the structure.
SM.ppSM.ppSM.ppSM.pp Structural mechanics post-processor modulePost-process static, dynamic deflections at fixed or variable speed, and plot the corresponding FFTs (displacement, velocity, acceleration) including modal participation and order tracking analysis.
Structural modules (4)
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
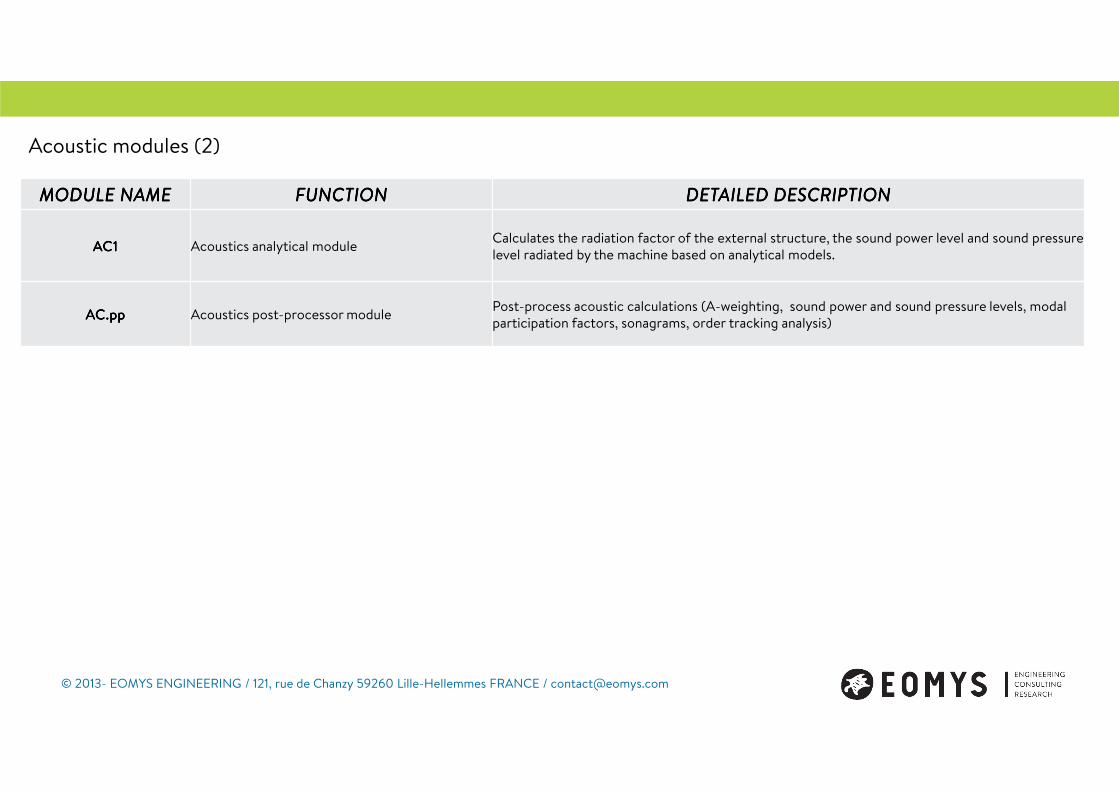
MODULE NAMEMODULE NAMEMODULE NAMEMODULE NAME FUNCTIONFUNCTIONFUNCTIONFUNCTION DETAILED DESCRIPTIONDETAILED DESCRIPTIONDETAILED DESCRIPTIONDETAILED DESCRIPTION
AC1AC1AC1AC1 Acoustics analytical moduleCalculates the radiation factor of the external structure, the sound power level and sound pressure level radiated by the machine based on analytical models.
AC.ppAC.ppAC.ppAC.pp Acoustics post-processor modulePost-process acoustic calculations (A-weighting, sound power and sound pressure levels, modal participation factors, sonagrams, order tracking analysis)
Acoustic modules (2)

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
MODULE NAMEMODULE NAMEMODULE NAMEMODULE NAME FUNCTIONFUNCTIONFUNCTIONFUNCTION DETAILED DESCRIPTIONDETAILED DESCRIPTIONDETAILED DESCRIPTIONDETAILED DESCRIPTION
CT1.SCIMCT1.SCIMCT1.SCIMCT1.SCIMControl module for squirrel cage induction machines
Calculates the slip and voltage to achieve specified torque characteristics based on the equivalent circuit parameters.
CT1.SMCT1.SMCT1.SMCT1.SM Control module for synchronous machinesCalculate the current angle to achieve specified torque based on the equivalent circuit parameters according to MTPA strategy.
CT2.PWMCT2.PWMCT2.PWMCT2.PWM PWM moduleGenerates 3-phase PWM voltage waveforms for asynchronous and synchronous modes, analytically or based on a Simulink model.
CT2.CICT2.CICT2.CICT2.CI Harmonic current injection module Allows to inject id or iq harmonic currents.
Control modules (4)

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
MODULE NAMEMODULE NAMEMODULE NAMEMODULE NAME FUNCTIONFUNCTIONFUNCTIONFUNCTION DETAILED DESCRIPTIONDETAILED DESCRIPTIONDETAILED DESCRIPTIONDETAILED DESCRIPTION
VS1VS1VS1VS1 Variable speed moduleCalls several fixed-speed simulations with varying input parameters depending on the control strategy (e.g. constant flux, torque/speed curve, etc)
VS.ppVS.ppVS.ppVS.pp Variable speed post-processorPost process results of variable speed simulations (spectrograms and sonagrams, outputs as a function of speed, modal contribution to noise as a function of speed).
MS1MS1MS1MS1 Multisimulation moduleCalls several times MANATEE by varying input parameters (e.g. to study the effet of the pole width or the slot numbers on noise) including correlation analysis between design variables and response variables.
MS.ppMS.ppMS.ppMS.pp Multisimulation postprocessingsDisplay results of multi-simulations (evolution of response variables, correlation analysis, plot in design variable and response variable spaces).
Variable speed & multi-simulation modules (4)
© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
MODULE NAMEMODULE NAMEMODULE NAMEMODULE NAME FUNCTIONFUNCTIONFUNCTIONFUNCTION DETAILED DESCRIPTIONDETAILED DESCRIPTIONDETAILED DESCRIPTIONDETAILED DESCRIPTION
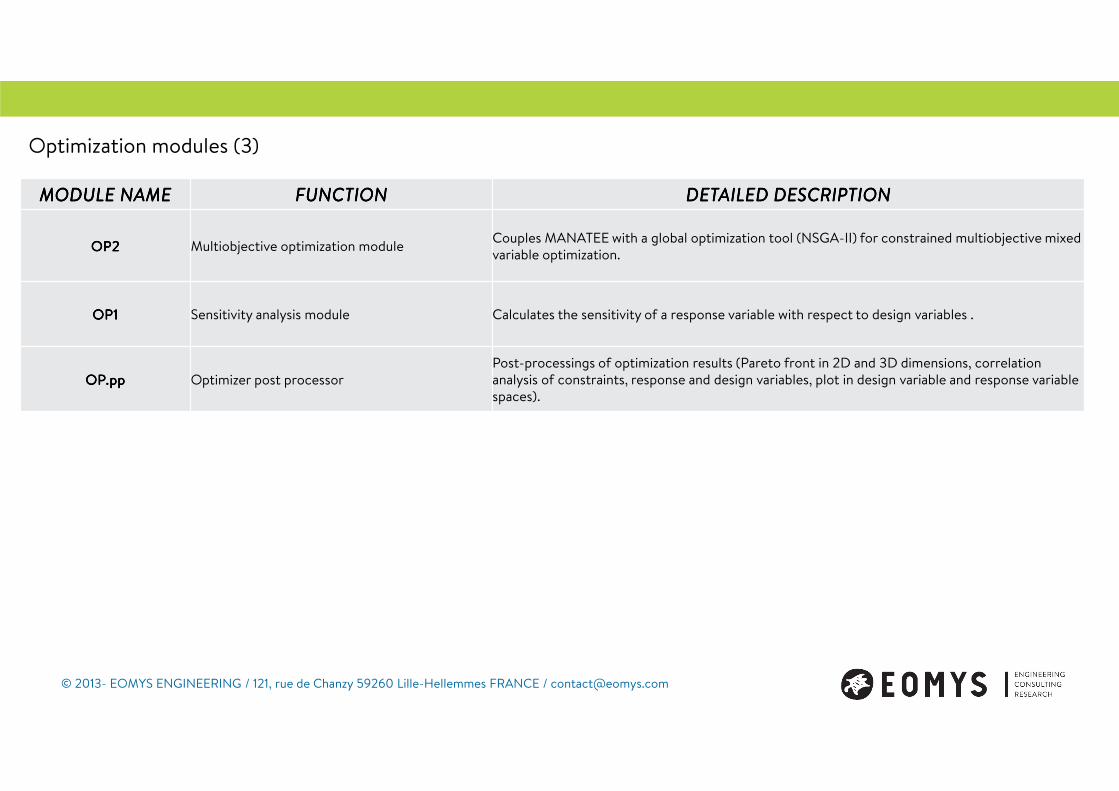
OP2OP2OP2OP2 Multiobjective optimization moduleCouples MANATEE with a global optimization tool (NSGA-II) for constrained multiobjective mixed variable optimization.
OP1OP1OP1OP1 Sensitivity analysis module Calculates the sensitivity of a response variable with respect to design variables .
OP.ppOP.ppOP.ppOP.pp Optimizer post processorPost-processings of optimization results (Pareto front in 2D and 3D dimensions, correlation analysis of constraints, response and design variables, plot in design variable and response variable spaces).
Optimization modules (3)

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
KEYWORDS:KEYWORDS:KEYWORDS:KEYWORDS:
MAGNETIC NOISEMAGNETIC ACOUSTIC NOISEELECTROMAGNETIC ACOUSTIC NOISEELECTRICAL NOISEAUDIBLE ELECTROMAGNETIC NOISEMAGNETICALLY-INDUCED VIBRATIONELECTROMAGNETICALLY INDUCED NOISEWHINING NOISEHIGH PITCH NOISEHUMMING NOISETONAL NOISEMAGNETIC VIBRATIONELECTROMAGNETIC VIBRATIONSDEFLECTION MECHANICAL DEFORMATIONMAXWELL FORCEMAXWELL TENSORMAGNETIC FORCEELECTROMAGNETIC FORCESUNBALANCED MAGNETIC PULL UMPVIBRATIONAL BEHAVIOURNOISE MITIGATIONNOISE CONTROLVIBRATION REDUCTION
TOOTH WINDINGCONCENTRATED WINDINGFRACTIONAL SLOT WINDINGDISTRIBUTED WINDINGSHORTED PITCH WINDINGMAGNETOMOTIVE FORCE MMFWINDING FUNCTIONSKEWSLOT INCLINATIONSTEP-SKEWSUBDOMAIN MODELPERMEANCE / MMF MODELPERMEANCE / CURRENT LINKAGE MODEL
PMSM IPMSM SM IM SRM SYNRM DFIG SYRMSYNCHRONOUS MACHINESPERMANENT MAGNETASYNCHRONOUS MACHINESQUIRREL CAGE INDUCTION MACHINEDOUBLY FED INDUCTION GENERATOR
ELECTRICAL MACHINESSWITCHED RELUCTANCE MACHINESSYNCHRONOUS RELUCTANCE MOTORBRUSHLESS AC MOTORBRUSHLESS DC MOTORDC SERVOMOTORSALTERNATORSPINDLE MOTORELECTRIC POWERTRAIN
FOURIER TRANSFORMFORCE HARMONICSHARMONIC REDUCTIONWAVENUMBERNODE NUMBERPOLE PAIR NUMBER SPATIAL ORDERPULSATING ROTATING PROGRESSIVE WAVERESONANCENATURAL FREQUENCYSTRUCTURAL MODEMODAL BASISMAGNIFICATIONDAMPING
MOTSMOTSMOTSMOTS----CLEFS:CLEFS:CLEFS:CLEFS:
BRUIT MAGNETIQUEBRUIT ACOUSTIQUE D’ORIGINE MAGNETIQUEBRUIT ELECTROMAGNETIQUEBRUIT AUDIBLE ELECTROMAGNETIQUEBRUIT ELECTRIQUEBRUIT HAUTE FREQUENCEBRUIT DE SIRENEMENTBRUIT TONALVIBRATION MAGNETIQUE VIBRATIONS ELECTROMAGNETIQUESDEPLACEMENTDEFORMATION MECANIQUEFORCE DE MAXWELLTENSEUR DE MAXWELLEFFORTS MAGNETIQUESFORCES ELECTROMAGNETIQUESBALOURD MAGNETIQUECOMPORTEMENT VIBRATOIREREDUCTION DE BRUITCONTRÖLE DE BRUITREDUCTION DES VIBRATIONS
BOBINAGE DENTAIREBOBINAGE CONCENTREBOBINAGE FRACTIONNAIREBOBINAGE DISTRIBUEBOBINAGE A PAS RACCOURCIFORCE MAGNETOMOTRICE FMMFONCTIONS DE BOBINAGEVRILLAGEINCLINAISON DES ENCOCHESPAS DE VRILLAGEMODELE DE SOUS DOMAINEPERMEANCE / MMF
MSAP MAS MRV MS MADAMACHINES SYNCHRONESAIMANTS PERMANENTSMACHINES A INDUCTIONMACHINES ASYNCHRONES A CAGE D’ECUREUILMACHINE ASYNCHRONE A DOUBLE ALIMENTATIONMACHINES ELECTRIQUES
MACHINES A RELUCTANCE VARIABLEMACHINES SYNCHRORELUCTANTESMOTEUR BRUSHLESSSERVOMOTEURALTERNATEUR
TRANSFORMEE DE FOURIERHARMONIQUE DE FORCEREDUCTION DES HARMONIQUESNOMBRE D’ONDENOMBRE DE NŒUDSNOMBRE DE PAIRES DE POLESORDRE SPATIALONDE TOURNANTE PULSANTE PROGRESSIVERESONANCEFREQUENCE NATURELLEMODE DE STRUCTUREBASE MODALEAMPLIFICATIONAMORTISSEMENT

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
Tangential and radial harmonic
magnetic forces (magnitude,
wavenumber, frequency, phase)
3D airgap time and
space flux distribution
HARMONIC DECOMPOSITIONHARMONIC DECOMPOSITIONHARMONIC DECOMPOSITIONHARMONIC DECOMPOSITION
r=2 r=3
ELECTROMAGNETIC ELECTROMAGNETIC ELECTROMAGNETIC ELECTROMAGNETIC MODELMODELMODELMODEL
r=0
STRUCTURAL FEA STRUCTURAL FEA STRUCTURAL FEA STRUCTURAL FEA MODELMODELMODELMODEL
Unit harmonic loads
for wavenumber
r=0, ±2, ±4 …STRUCTURAL FREQUENCY STRUCTURAL FREQUENCY STRUCTURAL FREQUENCY STRUCTURAL FREQUENCY RESPONSE FUNCTIONSRESPONSE FUNCTIONSRESPONSE FUNCTIONSRESPONSE FUNCTIONS
Motor and frame
modal basis
r=0 r=2
VIBRATION SYNTHESISVIBRATION SYNTHESISVIBRATION SYNTHESISVIBRATION SYNTHESIS
Complex FRFs (radial &
tangential) for each
wavenumber r
Spectrograms
Vibration level
Operation Deflection Shapes
Modal contribution
Radiating surface velocities
APPENDICES APPENDICES APPENDICES APPENDICES –––– SOUND & VIBRATION SYNTHESISSOUND & VIBRATION SYNTHESISSOUND & VIBRATION SYNTHESISSOUND & VIBRATION SYNTHESIS

© 2013- EOMYS ENGINEERING / 121, rue de Chanzy 59260 Lille-Hellemmes FRANCE / [email protected]
ACOUSTIC FEA ACOUSTIC FEA ACOUSTIC FEA ACOUSTIC FEA MODELMODELMODELMODEL
Unit radiating surface
displacementsACOUSTIC FREQUENCY ACOUSTIC FREQUENCY ACOUSTIC FREQUENCY ACOUSTIC FREQUENCY RESPONSE FUNCTIONSRESPONSE FUNCTIONSRESPONSE FUNCTIONSRESPONSE FUNCTIONS
Acoustic Transfer
Vector (ATV)
m=0 m=1
SOUND SYNTHESISSOUND SYNTHESISSOUND SYNTHESISSOUND SYNTHESIS
Complex FRFs for each
structural mode
(MATV)
Sonagrams
Sound Power Level
Directivity patterns
Modal contributions
Modal contributions
from vibration synthesis
VIBRATION SYNTHESISVIBRATION SYNTHESISVIBRATION SYNTHESISVIBRATION SYNTHESIS