M110 Technical Specification 29T-068883TK-01
34
® M110 Technical Specification 29T-068883TK-01 Release 2.9.0 (r2020-1) Copyright © 2020 Pi Innovo
Transcript of M110 Technical Specification 29T-068883TK-01

®
M110 Technical Specification29T-068883TK-01
Release 2.9.0 (r2020-1)
Copyright © 2020 Pi Innovo

Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) ii
®
www.pi-innovo.com
Table of Contents1. Technical specification ............................................................................................ 1
1.1. Overview ..................................................................................................... 11.2. Block diagram ............................................................................................. 21.3. Function reference ....................................................................................... 3
2. Connector pinout .................................................................................................... 52.1. Pocket A ..................................................................................................... 52.2. Pocket B ..................................................................................................... 8
3. Internal signals ..................................................................................................... 124. Operational details ............................................................................................... 17
4.1. ECU power ............................................................................................... 174.2. ECU power — control ................................................................................ 174.3. ECU power — wake-on-CAN ..................................................................... 184.4. Analog inputs ............................................................................................ 194.5. Analog inputs — relationship between sensor supplies and inputs ................. 194.6. Analog inputs — VREF diode inputs ........................................................... 204.7. Analog inputs — temperature, internal ........................................................ 214.8. Analog outputs .......................................................................................... 214.9. Digital inputs ............................................................................................. 214.10. Digital inputs — frequency measurement .................................................. 224.11. Digital inputs — SENT ............................................................................. 234.12. Digital outputs .......................................................................................... 234.13. Digital outputs — low-side ........................................................................ 234.14. Digital outputs — monitors ....................................................................... 234.15. Serial inputs and outputs .......................................................................... 244.16. Communication — CAN ........................................................................... 244.17. Communication — LIN ............................................................................. 244.18. Memory — configuration .......................................................................... 244.19. Memory — non-volatile storage and lifetime .............................................. 254.20. Memory — calibration capabilities ............................................................. 254.21. System modes ......................................................................................... 254.22. Flash codes ............................................................................................. 264.23. Floating point capabilities ......................................................................... 274.24. Customization — build options .................................................................. 28
5. Dimensions .......................................................................................................... 29A. Contact information .............................................................................................. 30

Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) iii
®
www.pi-innovo.com
List of Figures1.1. Block diagram of M110 functionality ..................................................................... 34.1. Switching arrangement for main power supply, wake-on-CAN enabled .................. 184.2. VREF arrangement ............................................................................................ 204.3. VREF diode monitor arrangement ....................................................................... 204.4. Frequency measurement .................................................................................... 224.5. Switching arrangement for low-side digital outputs ............................................... 234.6. Flash code sequence ......................................................................................... 265.1. Outline of physical dimensions ........................................................................... 29

Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) iv
®
www.pi-innovo.com
List of Tables1.1. Specification ........................................................................................................ 11.2. Function reference ............................................................................................... 32.1. Part numbers of the mating connector .................................................................. 52.2. Part numbers for the pins .................................................................................... 62.3. Part numbers for harness tools ............................................................................ 62.4. Connector pinout — Pocket A .............................................................................. 62.5. Part numbers of the mating connector .................................................................. 92.6. Part numbers for the pins .................................................................................... 92.7. Part numbers for harness tools ............................................................................ 92.8. Connector pinout — Pocket B .............................................................................. 93.1. Internal signals .................................................................................................. 124.1. Internal temperature conversion ......................................................................... 214.2. Memory configurations supported ....................................................................... 254.3. System mode selection ...................................................................................... 264.4. Flash code example .......................................................................................... 264.5. Flash codes ...................................................................................................... 274.6. Floating point conditions .................................................................................... 27

Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 1
®
www.pi-innovo.com
Chapter 1. Technical specification1.1. Overview ............................................................................................................. 11.2. Block diagram ..................................................................................................... 21.3. Function reference ............................................................................................... 3
This document is the technical specification for OpenECU part 01T-068883-01m00. Withinthis document, that part is referred to as the M110-000 ECU.
Note
For a list of issues and possible work arounds for this ECU, found after publication ofthis document, please refer to the hardware errata for this ECU (named 29T-068432M110 Technical Spec Errata).
Specific option control may exist for this part. In that case, parts of this document will beoverridden by an option control specific technical specification. Please refer to the optioncontrol technical specification for more information.
1.1. OverviewThis technical specification relates to the following ECU variant:
• M110-000 — for development and testing, including full interactive calibration toolintegration.
Table 1.1. Specification
VariantSpecification
M110-000
Status Prototype a
Processor MPC5534
Rate 80MHz
Code space 512KiB
RAM space up to 64KiB b
Calibration space up to 48KiB b
Calibratable Y
Reprogrammable Y
Power control relays -
Actuator supplies -
Sensor supplies 1
Inputs 10
Outputs 14
CAN buses 4
LIN buses 2
RS232 links -

Technical specification
Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 2
®
www.pi-innovo.com
VariantSpecification
M110-000
Connectors 2x20
Weight 350g
Vibration 6g random RMS
Shock capability - c
Enclosure IP65K
EMC - c
Partial operating voltage 6 to 36V
Full operating voltage 9 to 32V d
Standby current (typical) 0.45mA at 12V e
Operating current (typical) 100mA at 12V f
Operating temperature range -40 to +85°C
Storage temperature range (installation) -40 to +85°C
Storage temperature range (shipping) -40 to +85°Ca Target ECU at a prototype stage, available in limited quantities.b See list of possible memory configurations in section 'Memory - configuration'.c Please contact Pi for details.d Designed for 12V or 24V vehicles.e 1.75mA at 24V.f 75mA at 24V. When running idle task with I/O disconnected.
1.2. Block diagramThis shows a high-level pictoral description of this ECU's capability.

Technical specification
Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 3
®
www.pi-innovo.com
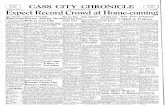
Figure 1.1. Block diagram of M110 functionality
VP
wr
z
Powertrain Relay
VG
nd
VP
wr
120 Ohm
120 ohm
120 Ohm
120 ohm
120 Ohm
120 ohm
120 Ohm
VRef
Sig Rtn
VR
ef
Sig
Rtn
VRef
Sig Rtn
VRef
Sig Rtn
VRef
Sig Rtn
VRef
Sig Rtn
Wake
5v Supply
B20 – Power
A12 - Ignition
A10 – CAN A+
A9 – CAN A-
A20 – CAN B+
A19 – CAN B-
A8 – CAN C+
A7 – CAN C-
A18 – CAN D+
A17 – CAN D-
SPITo
CAN
SPITo
CAN
A16 - Flash Enable
B4 - AIN A
B12 - AIN B
B1 - AIN C
A15 - AIN E
B11 - AIN F
A5 - SENT Rx A
A14/B15 - SigRtn
A6/B5 - 5v Ref
B14 - 0.5A LSD A
B6 - 0.5A LSD B
B16 - 0.5A LSD C
B13 - 0.5A LSD D
B3 - 0.5A LSD E
B2 - 0.5A LSD F
A4 - 0.1A LSD A
A13 - 0.1A LSD B
A2 - 2A LSD A
A3 - 2A LSD B
B8 - 2A LSD C
B7 - 2A LSD D
B19 - ECU Status Lamp
B17 - AOT A
B18 - AOT B
FreescaleMPC5534
120 Ohm
B10 – Ground
A1 – Ground
A11 – Power
B9 – Ground
1.3. Function referenceVarious input and output functionality is supported where some pins may be capable of morethan one function. Some functions require a combination of pins but not all pin combinationsare possible.
Table 1.2. Function reference
I/O type External Internal Pins
Power
ECU supply 1 - A11+B20
ECU ground 1 - A1+B9+B10
Sensor supply 1 - A6+B5

Technical specification
Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 4
®
www.pi-innovo.com
I/O type External Internal Pins
Module control, status
Ignition sense 1 - A12
Module controlFEPS
1 - A16
Module statusFlash code
1 - B19
Communication
CAN buses 4 - A8+A7, A10+A9, A18+A17, A20+A19
LIN buses 2 - A4, A13
Inputs — time based
Analogue 10 28 A5, A7, A8, A15, A17, A18, B1, B4, B11, B12
Digital 11 17 A5, A7, A8, A12, A15, A17, A18, B1, B4, B11, B12
Frequency 10 12 A5, A7, A8, A15, A17, A18, B1, B4, B11, B12
PWM - 12
Quadrature - 12
SENT 3 - A5, A15, B11
Outputs — time based
Analogueoutput
2 - B17, B18
Digital 12 6 A2, A3, A4, A13, B2, B3, B6, B7, B8, B13, B14, B16
PWM 12 - A2, A3, A4, A13, B2, B3, B6, B7, B8, B13, B14, B16
PWMsynchronised
12 - A2, A3, A4, A13, B2, B3, B6, B7, B8, B13, B14, B16
Inputs — angle based
None - -
Outputs — angle based
None - -

Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 5
®
www.pi-innovo.com
Ch
apte
r 2.
Co
nn
ecto
r p
ino
ut
2.1.
Poc
ket
A .
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
.. 5
2.2.
Poc
ket
B .
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
....
.. 8
The
M11
0-00
0 va
riant
s ha
ve t
wo
EC
U c
onne
ctor
s (p
ocke
ts)
nam
ed A
and
B,
whi
ch h
ave
pino
uts
as g
iven
in
the
follo
win
g ta
bles
. C
urre
nts
liste
d ar
e R
MS
unle
ss o
ther
wis
e st
ated
.
The
follo
win
g ab
brev
iatio
ns a
re u
sed
in th
e pi
nout
tabl
es b
elow
:
CC
omm
unic
atio
nI
Inpu
tM
Mon
itor
OO
utpu
tP
Pow
er
CT
Cur
rent
trip
GN
DG
roun
dP
SU
Pow
er s
uppl
yP
WR
Pow
er
2.1.
Po
cket
AC
onne
ctor
pac
ks c
an b
e or
dere
d fr
om P
i. In
divi
dual
con
nect
or c
ompo
nent
s ca
n be
ord
ered
from
Pi o
r fr
om v
ario
us m
anuf
actu
rers
.
110
1120
Tab
le 2
.1. P
art
nu
mb
ers
of
the
mat
ing
co
nn
ecto
r
Su
pp
lier
Par
t n
um
ber
Co
lor
Par
t
Mol
ex33
472-
2001
Bla
ckF
emal
e co
nnec
tor

Connector pinout
Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 6
®
www.pi-innovo.com
Tab
le 2
.2. P
art
nu
mb
ers
for
the
pin
s
Su
pp
lier
Par
t n
um
ber
Par
t
3301
2-30
02F
emal
e te
rmin
alM
olex
0343
4500
01P
lug
for
unus
ed p
ositi
on
Tab
le 2
.3. P
art
nu
mb
ers
for
har
nes
s to
ols
Su
pp
lier
Par
t n
um
ber
Par
t
0638
1160
00C
rimp
tool
Mol
ex
6381
3-15
00E
xtra
ctio
n to
ol
Tab
le 2
.4. C
on
nec
tor
pin
ou
t —
Po
cket
A
Mai
n c
on
nec
tor
— P
ock
et A
Pin
PF
un
ctio
nI/O
ML
oad
ing
Filt
erR
ang
eN
ote
s
A1
VG
ND
P20
AR
atin
g sp
ecifi
ed a
t max
imum
ope
ratin
g te
mpe
ratu
re. T
o ac
hiev
eth
e cu
rren
t car
ryin
g ca
pabi
lity
of th
is p
in, t
he m
axim
um w
irega
uge
allo
wed
in th
e w
ire h
arne
ss m
ust b
e us
ed.
A2
Dig
ital
OY
2AD
efau
lt po
pula
tion:
Pop
ulat
ed. R
elat
ed to
inte
rnal
cha
nnel
sM
onito
r (d
), M
onito
r (s
tatu
s) a
nd M
onito
r (v
).
A3
Dig
ital
OY
2AD
efau
lt po
pula
tion:
Pop
ulat
ed. R
elat
ed to
inte
rnal
cha
nnel
sM
onito
r (d
), M
onito
r (s
tatu
s) a
nd M
onito
r (v
).
A4
Dig
ital
OY
100m
AD
efau
lt po
pula
tion:
Pop
ulat
ed. R
elat
ed to
inte
rnal
cha
nnel
sM
onito
r (d
) an
d M
onito
r (v
).
Ana
logu
e1.
68kH
z12
-bit
unsi
gned
con
vers
ion.
To
conv
ert m
easu
red
volta
ge (
Vm
)to
act
ual v
olta
ge (
Va)
use
the
equa
tion,
Va=
Vm
*1.0
56. D
efau
ltpo
pula
tion:
SE
NT
rx.
Dig
ital
20kR
to 5
V
254.
41kH
zD
efau
lt po
pula
tion:
Not
pop
ulat
ed.
A5
SE
NT
I0V
to 5
V
Def
ault
popu
latio
n: P
opul
ated
. Not
e: S
EN
T R
x an
d 0-
5V A
IN a
rebo
th e
quip
ped
for
the
defa
ult p
opul
atio
n.

Connector pinout
Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 7
®
www.pi-innovo.com
Mai
n c
on
nec
tor
— P
ock
et A
Pin
PF
un
ctio
nI/O
ML
oad
ing
Filt
erR
ang
eN
ote
s
A6
Sen
sor
supp
lyP
Y5V
, 250
mA
Sen
sor
supp
ly. C
urre
nt c
apab
ility
list
ed is
tota
l for
bot
h su
pply
pins
. Can
be
turn
ed o
n an
d of
f by
the
appl
icat
ion
for
diag
nost
ics
purp
oses
. Rel
ated
to in
tern
al c
hann
els
DO
T e
nabl
e an
d M
onito
r(v
).
CA
N-
(low
)C
CA
N b
us C
low
(-v
e), s
ee a
lso:
A8.
Rel
ated
to in
tern
al c
hann
elD
OT
dis
able
-CA
N.
Ana
logu
e51
kR to
GN
D0V
to 1
5.02
V12
-bit
unsi
gned
con
vers
ion.
To
conv
ert m
easu
red
volta
ge (
Vm
)to
act
ual v
olta
ge (
Va)
use
the
equa
tion,
Va=
Vm
*3.0
03. D
efau
ltpo
pula
tion:
Not
Pop
ulat
ed.
A7
Dig
ital
I
3.9k
R to
5V
1.59
kHz
0V to
5V
Def
ault
popu
latio
n: N
ot p
opul
ated
.
CA
N+
(hi
gh)
CC
AN
bus
C h
igh
(+ve
), s
ee a
lso:
A7.
Rel
ated
to in
tern
al c
hann
elD
OT
dis
able
-CA
N.
Ana
logu
e51
kR to
GN
D0V
to 1
5.02
V12
-bit
unsi
gned
con
vers
ion.
To
conv
ert m
easu
red
volta
ge (
Vm
)to
act
ual v
olta
ge (
Va)
use
the
equa
tion,
Va=
Vm
*3.0
03. D
efau
ltpo
pula
tion:
Not
Pop
ulat
ed.
A8
Dig
ital
I
3.9k
R to
5V
1.59
kHz
0V to
5V
Def
ault
popu
latio
n: N
ot p
opul
ated
.
A9
CA
N-
(low
)C
120R
toC
AN
A_P
CA
N b
us A
low
(-v
e). D
efau
lt C
AN
bus
for
repr
ogra
mm
ing
unle
ss o
verr
idde
n by
the
appl
icat
ion,
see
als
o: A
10. R
elat
ed to
inte
rnal
cha
nnel
s D
OT
dis
able
-CA
N a
nd M
onito
r (n
o fa
ult)
.
A10
CA
N+
(hi
gh)
C12
0R to
CA
NA
_NC
AN
bus
A h
igh
(+ve
). D
efau
lt C
AN
bus
for
repr
ogra
mm
ing
unle
ss o
verr
idde
n by
the
appl
icat
ion,
see
als
o: A
9. R
elat
ed to
inte
rnal
cha
nnel
s D
OT
dis
able
-CA
N a
nd M
onito
r (n
o fa
ult)
.
A11
VP
WR
P20
AR
atin
g sp
ecifi
ed a
t max
imum
ope
ratin
g te
mpe
ratu
re. T
o ac
hiev
eth
e cu
rren
t car
ryin
g ca
pabi
lity
of th
is p
in, t
he m
axim
um w
irega
uge
allo
wed
in th
e w
ire h
arne
ss m
ust b
e us
ed. R
elat
ed to
inte
rnal
cha
nnel
AIN
VP
WR
.
A12
Dig
ital
I4.
7kR
to V
GN
D10
0Hz
0V to
VP
WR
Key
pos
ition
(ig
nitio
n se
nse)
inpu
t. T
his
sign
al is
inve
rted
inha
rdw
are.
A v
olta
ge h
ighe
r th
an 5
V w
orst
cas
e w
ill w
ake
up th
eE
CU
. Rel
ated
to in
tern
al c
hann
el D
OT
ena
ble-
PS
U-h
old.

Connector pinout
Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 8
®
www.pi-innovo.com
Mai
n c
on
nec
tor
— P
ock
et A
Pin
PF
un
ctio
nI/O
ML
oad
ing
Filt
erR
ang
eN
ote
s
A13
Dig
ital
OY
100m
AD
efau
lt po
pula
tion:
Pop
ulat
ed. R
elat
ed to
inte
rnal
cha
nnel
sM
onito
r (d
) an
d M
onito
r (v
).
A14
Sen
sor
grou
ndP
250m
AS
enso
r gr
ound
, VR
TN
D.
Ana
logu
e12
-bit
unsi
gned
con
vers
ion.
Uns
cale
d. D
efau
lt po
pula
tion:
Pul
ldow
n.
Dig
ital
51kR
to G
ND
531H
zA
15
SE
NT
I0V
to 5
V
Def
ault
popu
latio
n: N
ot p
opul
ated
.
A16
FE
PS
I92
kR to
5V
-18V
Mod
ule
flash
pro
gram
min
g co
ntro
l.
CA
N-
(low
)C
CA
N b
us D
low
(-v
e), s
ee a
lso:
A18
. Rel
ated
to in
tern
al c
hann
elD
OT
dis
able
-CA
N.
Ana
logu
e51
kR to
GN
D0V
to 1
5.02
V12
-bit
unsi
gned
con
vers
ion.
To
conv
ert m
easu
red
volta
ge (
Vm
)to
act
ual v
olta
ge (
Va)
use
the
equa
tion,
Va=
Vm
*3.0
03. D
efau
ltpo
pula
tion:
Not
Pop
ulat
ed.
A17
Dig
ital
I
3.9k
R to
5V
1.59
kHz
0V to
5V
Def
ault
popu
latio
n: N
ot p
opul
ated
.
CA
N+
(hi
gh)
CC
AN
bus
D h
igh
(+ve
), s
ee a
lso:
A17
. Rel
ated
to in
tern
alch
anne
l DO
T d
isab
le-C
AN
.
Ana
logu
e51
kR to
GN
D0V
to 1
5.02
V12
-bit
unsi
gned
con
vers
ion.
To
conv
ert m
easu
red
volta
ge (
Vm
)to
act
ual v
olta
ge (
Va)
use
the
equa
tion,
Va=
Vm
*3.0
03. D
efau
ltpo
pula
tion:
Not
Pop
ulat
ed.
A18
Dig
ital
I
3.9k
R to
5V
1.59
kHz
0V to
5V
Def
ault
popu
latio
n: N
ot p
opul
ated
.
A19
CA
N-
(low
)C
CA
N b
us B
low
(-v
e), s
ee a
lso:
A20
. Rel
ated
to in
tern
al c
hann
elD
OT
dis
able
-CA
N.
A20
CA
N+
(hi
gh)
CC
AN
bus
B h
igh
(+ve
), s
ee a
lso:
A19
. Rel
ated
to in
tern
alch
anne
l DO
T d
isab
le-C
AN
.
2.2.
Po
cket
BC
onne
ctor
pac
ks c
an b
e or
dere
d fr
om P
i. In
divi
dual
con
nect
or c
ompo
nent
s ca
n be
ord
ered
from
Pi o
r fr
om v
ario
us m
anuf
actu
rers
.

Connector pinout
Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 9
®
www.pi-innovo.com
110
1120
Tab
le 2
.5. P
art
nu
mb
ers
of
the
mat
ing
co
nn
ecto
r
Su
pp
lier
Par
t n
um
ber
Co
lor
Par
t
Mol
ex33
472-
2002
Gre
yF
emal
e co
nnec
tor
Tab
le 2
.6. P
art
nu
mb
ers
for
the
pin
s
Su
pp
lier
Par
t n
um
ber
Par
t
3301
2-30
02F
emal
e te
rmin
alM
olex
0343
4500
01P
lug
for
unus
ed p
ositi
on
Tab
le 2
.7. P
art
nu
mb
ers
for
har
nes
s to
ols
Su
pp
lier
Par
t n
um
ber
Par
t
0638
1160
00C
rimp
tool
Mol
ex
6381
3-15
00E
xtra
ctio
n to
ol
Tab
le 2
.8. C
on
nec
tor
pin
ou
t —
Po
cket
B
Mai
n c
on
nec
tor
— P
ock
et B
Pin
PF
un
ctio
nI/O
ML
oad
ing
Filt
erR
ang
eN
ote
s
Ana
logu
e12
-bit
unsi
gned
con
vers
ion.
Uns
cale
d. D
efau
lt po
pula
tion:
Pul
lup.
Rel
ated
to in
tern
al c
hann
el A
IN V
ref d
iode
.B
1
Dig
ital
I22
0R to
5V
531H
z0V
to 5
V
Def
ault
popu
latio
n: N
ot p
opul
ated
.
B2
Dig
ital
OY
500m
AD
efau
lt po
pula
tion:
Pop
ulat
ed. R
elat
ed to
inte
rnal
cha
nnel
sM
onito
r (d
) an
d M
onito
r (v
).

Connector pinout
Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 10
®
www.pi-innovo.com
Mai
n c
on
nec
tor
— P
ock
et B
Pin
PF
un
ctio
nI/O
ML
oad
ing
Filt
erR
ang
eN
ote
s
B3
Dig
ital
OY
500m
AD
efau
lt po
pula
tion:
Pop
ulat
ed. R
elat
ed to
inte
rnal
cha
nnel
sM
onito
r (d
) an
d M
onito
r (v
).
Ana
logu
e0V
to 4
16m
V12
-bit
unsi
gned
con
vers
ion.
To
conv
ert m
easu
red
volta
ge (
Vm
)to
act
ual v
olta
ge (
Va)
use
the
equa
tion,
Va=
Vm
*0.0
82. D
efau
ltpo
pula
tion:
RT
D. R
elat
ed to
inte
rnal
cha
nnel
AIN
Vre
f dio
de.
B4
Dig
ital
I4.
7kR
to 5
V57
4Hz
0V to
5V
Def
ault
popu
latio
n: N
ot p
opul
ated
.
B5
Sen
sor
supp
lyP
Y5V
, 250
mA
Sen
sor
supp
ly. C
urre
nt c
apab
ility
list
ed is
tota
l for
bot
h su
pply
pins
. Can
be
turn
ed o
n an
d of
f by
the
appl
icat
ion
for
diag
nost
ics
purp
oses
. Rel
ated
to in
tern
al c
hann
els
DO
T e
nabl
e an
d M
onito
r(v
).
B6
Dig
ital
OY
500m
AD
efau
lt po
pula
tion:
Pop
ulat
ed. R
elat
ed to
inte
rnal
cha
nnel
sM
onito
r (d
) an
d M
onito
r (v
).
B7
Dig
ital
OY
2AD
efau
lt po
pula
tion:
Pop
ulat
ed. R
elat
ed to
inte
rnal
cha
nnel
sM
onito
r (d
), M
onito
r (s
tatu
s) a
nd M
onito
r (v
).
B8
Dig
ital
OY
2AD
efau
lt po
pula
tion:
Pop
ulat
ed. R
elat
ed to
inte
rnal
cha
nnel
sM
onito
r (d
), M
onito
r (s
tatu
s) a
nd M
onito
r (v
).
B9
VG
ND
P20
AR
atin
g sp
ecifi
ed a
t max
imum
ope
ratin
g te
mpe
ratu
re. T
o ac
hiev
eth
e cu
rren
t car
ryin
g ca
pabi
lity
of th
is p
in, t
he m
axim
um w
irega
uge
allo
wed
in th
e w
ire h
arne
ss m
ust b
e us
ed.
B10
VG
ND
P20
AR
atin
g sp
ecifi
ed a
t max
imum
ope
ratin
g te
mpe
ratu
re. T
o ac
hiev
eth
e cu
rren
t car
ryin
g ca
pabi
lity
of th
is p
in, t
he m
axim
um w
irega
uge
allo
wed
in th
e w
ire h
arne
ss m
ust b
e us
ed.
Ana
logu
e12
-bit
unsi
gned
con
vers
ion.
Uns
cale
d. D
efau
lt po
pula
tion:
Pul
ldow
n.
Dig
ital
51kR
to G
ND
531H
zB
11
SE
NT
I0V
to 5
V
Def
ault
popu
latio
n: N
ot p
opul
ated
.
B12
Ana
logu
eI
10kR
to 5
V53
1Hz
0V to
5V
12-b
it un
sign
ed c
onve
rsio
n. U
nsca
led.
Def
ault
popu
latio
n:P
ullu
p. R
elat
ed to
inte
rnal
cha
nnel
AIN
Vre
f dio
de.

Connector pinout
Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 11
®
www.pi-innovo.com
Mai
n c
on
nec
tor
— P
ock
et B
Pin
PF
un
ctio
nI/O
ML
oad
ing
Filt
erR
ang
eN
ote
s
Dig
ital
Def
ault
popu
latio
n: N
ot p
opul
ated
.
B13
Dig
ital
OY
500m
AD
efau
lt po
pula
tion:
Pop
ulat
ed. R
elat
ed to
inte
rnal
cha
nnel
sM
onito
r (d
) an
d M
onito
r (v
).
B14
Dig
ital
OY
500m
AD
efau
lt po
pula
tion:
Pop
ulat
ed. R
elat
ed to
inte
rnal
cha
nnel
sM
onito
r (d
) an
d M
onito
r (v
).
B15
Sen
sor
grou
ndP
250m
AS
enso
r gr
ound
, VR
TN
D.
B16
Dig
ital
OY
500m
AD
efau
lt po
pula
tion:
Pop
ulat
ed. R
elat
ed to
inte
rnal
cha
nnel
sM
onito
r (d
) an
d M
onito
r (v
).
B17
Ana
logu
e ou
tput
OY
0 to
5V
Ser
ial o
utpu
t. R
elat
ed to
inte
rnal
cha
nnel
Mon
itor
(v).
B18
Ana
logu
e ou
tput
OY
0 to
5V
Ser
ial o
utpu
t. R
elat
ed to
inte
rnal
cha
nnel
Mon
itor
(v).
B19
Fla
sh c
ode
OLo
w s
ide
20m
AE
CU
sta
tus
info
rmat
ion.
See
sec
tion
"Fla
sh C
odes
" fo
r de
taile
dde
scrip
tion.
Def
ault
popu
latio
n: P
opul
ated
.
B20
VP
WR
P20
AR
atin
g sp
ecifi
ed a
t max
imum
ope
ratin
g te
mpe
ratu
re. T
o ac
hiev
eth
e cu
rren
t car
ryin
g ca
pabi
lity
of th
is p
in, t
he m
axim
um w
irega
uge
allo
wed
in th
e w
ire h
arne
ss m
ust b
e us
ed. R
elat
ed to
inte
rnal
cha
nnel
AIN
VP
WR
.

Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 12
®
www.pi-innovo.com
Ch
apte
r 3.
Inte
rnal
sig
nal
sT
able
3.1
. In
tern
al s
ign
als
Sig
nal
I/OS
ign
al t
ype
Ran
ge
No
tes
An
alo
gu
e
AIN
3.3
VI
Ana
logu
e0V
to 5
VIn
tern
al 3
.3V
sup
ply
mon
itor.
12-
bit u
nsig
ned
conv
ersi
on.
Uns
cale
d. D
efau
lt po
pula
tion:
Pop
ulat
ed.
AIN
5.0
VI
Ana
logu
e0V
to 6
.96V
Inte
rnal
5V
sup
ply
mon
itor.
12-
bit u
nsig
ned
conv
ersi
on. T
oco
nver
t mea
sure
d vo
ltage
(V
m)
to a
ctua
l vol
tage
(V
a) u
seth
e eq
uatio
n, V
a=V
m*1
.393
. Def
ault
popu
latio
n: P
opul
ated
.
AIN
VP
WR
(pi
n A
11 a
nd B
20)
IA
nalo
gue
0V to
40V
12-b
it un
sign
ed c
onve
rsio
n. T
o co
nver
t mea
sure
d vo
ltage
(Vm
) to
act
ual v
olta
ge (
Va)
use
the
equa
tion,
Va=
Vm
*8.0
00.
Def
ault
popu
latio
n: P
opul
ated
.
AIN
Vre
fI
Ana
logu
e0V
to 1
0VIn
tern
al A
nalo
g in
put r
efer
ence
mon
itor.
12-
bit u
nsig
ned
conv
ersi
on. T
o co
nver
t mea
sure
d vo
ltage
(V
m)
to a
ctua
lvo
ltage
(V
a) u
se th
e eq
uatio
n, V
a=V
m*2
. Def
ault
popu
latio
n:P
opul
ated
.
AIN
Vre
f dio
de (
pin
B1)
IA
nalo
gue
0V to
5V
12-b
it un
sign
ed c
onve
rsio
n. U
nsca
led.
Def
ault
popu
latio
n:P
opul
ated
.
AIN
Vre
f dio
de (
pin
B12
)I
Ana
logu
e0V
to 5
V12
-bit
unsi
gned
con
vers
ion.
Uns
cale
d. D
efau
lt po
pula
tion:
Not
Pop
ulat
ed.
AIN
Vre
f dio
de (
pin
B4)
IA
nalo
gue
0V to
5V
12-b
it un
sign
ed c
onve
rsio
n. U
nsca
led.
Def
ault
popu
latio
n:P
opul
ated
.
AIN
VR
HI
Ana
logu
e0V
to 5
V12
-bit
unsi
gned
con
vers
ion.
5V
ref
eren
ce fo
r an
alog
ue in
put
conv
ersi
ons.
AIN
VR
H-V
RL
25%
IA
nalo
gue
0V to
5V
12-b
it un
sign
ed c
onve
rsio
n. 1
.25V
ref
eren
ce fo
r an
alog
uein
put c
onve
rsio
ns.
AIN
VR
H-V
RL
50%
IA
nalo
gue
0V to
5V
12-b
it un
sign
ed c
onve
rsio
n. 2
.5V
ref
eren
ce fo
r an
alog
uein
put c
onve
rsio
ns. W
ill r
ead
as 2
.48V
due
to 2
0mV
offs
et in
proc
esso
r im
plem
enta
tion.

Internal signals
Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 13
®
www.pi-innovo.com
Sig
nal
I/OS
ign
al t
ype
Ran
ge
No
tes
AIN
VR
H-V
RL
75%
IA
nalo
gue
0V to
5V
12-b
it un
sign
ed c
onve
rsio
n. 3
.75V
ref
eren
ce fo
r an
alog
uein
put c
onve
rsio
ns.
AIN
VR
LI
Ana
logu
e0V
to 5
V12
-bit
unsi
gned
con
vers
ion.
0V
ref
eren
ce fo
r an
alog
ue in
put
conv
ersi
ons.
Dig
ital
DO
T e
nabl
e (p
in A
6 an
d B
5)O
Dig
ital
0 or
1S
et to
hig
h to
ena
ble
sens
or s
uppl
y. S
et to
low
to d
isab
le.
DO
T e
nabl
e-P
SU
-hol
d (p
in A
12)
OD
igita
l0
or 1
Dig
ital o
utpu
t con
trol
ling
the
pow
er s
uppl
y to
EC
U in
conj
unct
ion
with
the
key
posi
tion
(igni
tion
sens
e) in
put.
Set
high
to e
nabl
e po
wer
hol
d an
d lo
w to
dis
able
.
Mon
itor
(d)
(pin
A13
)I
Dig
ital
0 or
1O
utpu
t sta
te. S
ee s
ectio
n "D
igita
l out
puts
- m
onito
rs"
for
deta
iled
desc
ripto
n. D
efau
lt po
pula
tion:
Pop
ulat
ed.
Mon
itor
(d)
(pin
A2)
ID
igita
l0
or 1
Out
put s
tate
. See
sec
tion
"Dig
ital o
utpu
ts -
mon
itors
" fo
rde
taile
d de
scrip
ton.
Def
ault
popu
latio
n: P
opul
ated
.
Mon
itor
(d)
(pin
A3)
ID
igita
l0
or 1
Out
put s
tate
. See
sec
tion
"Dig
ital o
utpu
ts -
mon
itors
" fo
rde
taile
d de
scrip
ton.
Def
ault
popu
latio
n: P
opul
ated
.
Mon
itor
(d)
(pin
A4)
ID
igita
l0
or 1
Out
put s
tate
. See
sec
tion
"Dig
ital o
utpu
ts -
mon
itors
" fo
rde
taile
d de
scrip
ton.
Def
ault
popu
latio
n: P
opul
ated
.
Mon
itor
(d)
(pin
B13
)I
Dig
ital
0 or
1O
utpu
t sta
te. S
ee s
ectio
n "D
igita
l out
puts
- m
onito
rs"
for
deta
iled
desc
ripto
n. D
efau
lt po
pula
tion:
Pop
ulat
ed.
Mon
itor
(d)
(pin
B14
)I
Dig
ital
0 or
1O
utpu
t sta
te. S
ee s
ectio
n "D
igita
l out
puts
- m
onito
rs"
for
deta
iled
desc
ripto
n. D
efau
lt po
pula
tion:
Pop
ulat
ed.
Mon
itor
(d)
(pin
B16
)I
Dig
ital
0 or
1O
utpu
t sta
te. S
ee s
ectio
n "D
igita
l out
puts
- m
onito
rs"
for
deta
iled
desc
ripto
n. D
efau
lt po
pula
tion:
Pop
ulat
ed.
Mon
itor
(d)
(pin
B2)
ID
igita
l0
or 1
Out
put s
tate
. See
sec
tion
"Dig
ital o
utpu
ts -
mon
itors
" fo
rde
taile
d de
scrip
ton.
Def
ault
popu
latio
n: P
opul
ated
.
Mon
itor
(d)
(pin
B3)
ID
igita
l0
or 1
Out
put s
tate
. See
sec
tion
"Dig
ital o
utpu
ts -
mon
itors
" fo
rde
taile
d de
scrip
ton.
Def
ault
popu
latio
n: P
opul
ated
.
Mon
itor
(d)
(pin
B6)
ID
igita
l0
or 1
Out
put s
tate
. See
sec
tion
"Dig
ital o
utpu
ts -
mon
itors
" fo
rde
taile
d de
scrip
ton.
Def
ault
popu
latio
n: P
opul
ated
.

Internal signals
Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 14
®
www.pi-innovo.com
Sig
nal
I/OS
ign
al t
ype
Ran
ge
No
tes
Mon
itor
(d)
(pin
B7)
ID
igita
l0
or 1
Out
put s
tate
. See
sec
tion
"Dig
ital o
utpu
ts -
mon
itors
" fo
rde
taile
d de
scrip
ton.
Def
ault
popu
latio
n: P
opul
ated
.
Mon
itor
(d)
(pin
B8)
ID
igita
l0
or 1
Out
put s
tate
. See
sec
tion
"Dig
ital o
utpu
ts -
mon
itors
" fo
rde
taile
d de
scrip
ton.
Def
ault
popu
latio
n: P
opul
ated
.
Mon
itor
(sta
tus)
(pi
n A
2)I
Dig
ital
0 or
1Lo
w-s
ide
driv
er s
tatu
s. L
ow in
dica
tes
faul
t. S
ee s
ectio
n"D
igita
l out
puts
- m
onito
rs"
for
deta
iled
desc
ripto
n.
Mon
itor
(sta
tus)
(pi
n A
3)I
Dig
ital
0 or
1Lo
w-s
ide
driv
er s
tatu
s. L
ow in
dica
tes
faul
t. S
ee s
ectio
n"D
igita
l out
puts
- m
onito
rs"
for
deta
iled
desc
ripto
n.
Mon
itor
(sta
tus)
(pi
n B
7)I
Dig
ital
0 or
1Lo
w-s
ide
driv
er s
tatu
s. L
ow in
dica
tes
faul
t. S
ee s
ectio
n"D
igita
l out
puts
- m
onito
rs"
for
deta
iled
desc
ripto
n.
Mon
itor
(sta
tus)
(pi
n B
8)I
Dig
ital
0 or
1Lo
w-s
ide
driv
er s
tatu
s. L
ow in
dica
tes
faul
t. S
ee s
ectio
n"D
igita
l out
puts
- m
onito
rs"
for
deta
iled
desc
ripto
n.
Dig
ital
(C
AN
)
DO
T d
isab
le-C
AN
(pi
n A
10 a
nd A
9)O
Dig
ital
0 or
1D
igita
l out
put c
ontr
ollin
g C
AN
tran
smis
sion
. Set
hig
h to
disa
ble
tran
smis
sion
, low
to e
nabl
e.
DO
T d
isab
le-C
AN
(pi
n A
18 a
nd A
17)
OD
igita
l0
or 1
Dig
ital o
utpu
t con
trol
ling
CA
N tr
ansm
issi
on. S
et h
igh
todi
sabl
e tr
ansm
issi
on, l
ow to
ena
ble.
DO
T d
isab
le-C
AN
(pi
n A
20 a
nd A
19)
OD
igita
l0
or 1
Dig
ital o
utpu
t con
trol
ling
CA
N tr
ansm
issi
on. S
et h
igh
todi
sabl
e tr
ansm
issi
on, l
ow to
ena
ble.
DO
T d
isab
le-C
AN
(pi
n A
8 an
d A
7)O
Dig
ital
0 or
1D
igita
l out
put c
ontr
ollin
g C
AN
tran
smis
sion
. Set
hig
h to
disa
ble
tran
smis
sion
, low
to e
nabl
e.
Mon
itor
(no
faul
t) (
pin
A10
and
A9)
ID
igita
l0
or 1
Dig
ital i
nput
indi
catin
g an
err
or w
ith C
AN
A (
activ
e lo
w).
Mem
ory
ch
eck
Mon
itor
(cou
nter
eT
PU
bac
kgro
und
task
)I
Dig
ital d
ata
0 to
655
35C
yclic
cou
nter
pro
vidi
ng n
umbe
r of
tim
es th
e eT
PU
back
grou
nd ta
sk r
uns.
Its
rate
of i
ncre
ase
can
be u
sed
tode
term
ine
the
rate
of t
he b
ackg
roun
d ta
sk.
Mon
itor
(fc
SD
M-c
heck
sum
)I
Dig
ital d
ata
0 to
655
35S
atur
atin
g co
unte
r pr
ovid
ing
num
ber
of ti
mes
the
eTP
Um
odul
e's
data
mem
ory
faile
d a
chec
ksum
test
.
Tem
per
atu
re m
on
ito
r

Internal signals
Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 15
®
www.pi-innovo.com
Sig
nal
I/OS
ign
al t
ype
Ran
ge
No
tes
AIN
PC
B te
mp
IA
nalo
gue
-40°
C to
+12
5°C
Inte
rnal
EC
U te
mpe
ratu
re m
easu
rem
ent.
12-b
it un
sign
edco
nver
sion
. Con
vers
ion
from
vol
tage
to te
mpe
ratu
re is
non
-lin
ear
and
spec
ified
by
a lo
ok-u
p ta
ble.
Def
ault
popu
latio
n:P
opul
ated
.
Vo
ltag
e m
on
ito
r
Mon
itor
(v)
(pin
A13
)I
Ana
logu
e0V
to 6
.1V
12-b
it un
sign
ed c
onve
rsio
n. T
o co
nver
t mea
sure
d vo
ltage
(Vm
) to
act
ual v
olta
ge (
Va)
use
the
equa
tion,
Va=
Vm
*1.2
20.
Def
ault
popu
latio
n: N
ot P
opul
ated
.
Mon
itor
(v)
(pin
A2)
IA
nalo
gue
0V to
6.1
V12
-bit
unsi
gned
con
vers
ion.
To
conv
ert m
easu
red
volta
ge(V
m)
to a
ctua
l vol
tage
(V
a) u
se th
e eq
uatio
n, V
a=V
m*1
.220
.D
efau
lt po
pula
tion:
Not
Pop
ulat
ed.
Mon
itor
(v)
(pin
A3)
IA
nalo
gue
0V to
6.1
V12
-bit
unsi
gned
con
vers
ion.
To
conv
ert m
easu
red
volta
ge(V
m)
to a
ctua
l vol
tage
(V
a) u
se th
e eq
uatio
n, V
a=V
m*1
.220
.D
efau
lt po
pula
tion:
Not
Pop
ulat
ed.
Mon
itor
(v)
(pin
A4)
IA
nalo
gue
0V to
6.1
V12
-bit
unsi
gned
con
vers
ion.
To
conv
ert m
easu
red
volta
ge(V
m)
to a
ctua
l vol
tage
(V
a) u
se th
e eq
uatio
n, V
a=V
m*1
.220
.D
efau
lt po
pula
tion:
Not
Pop
ulat
ed.
Mon
itor
(v)
(pin
A6
and
B5)
IA
nalo
gue
0V to
5.7
1V12
-bit
unsi
gned
con
vers
ion.
To
conv
ert m
easu
red
volta
ge(V
m)
to a
ctua
l vol
tage
(V
a) u
se th
e eq
uatio
n, V
a=V
m*1
.143
.D
efau
lt po
pula
tion:
Pop
ulat
ed.
Mon
itor
(v)
(pin
B13
)I
Ana
logu
e0V
to 6
.1V
12-b
it un
sign
ed c
onve
rsio
n. T
o co
nver
t mea
sure
d vo
ltage
(Vm
) to
act
ual v
olta
ge (
Va)
use
the
equa
tion,
Va=
Vm
*1.2
20.
Def
ault
popu
latio
n: N
ot P
opul
ated
.
Mon
itor
(v)
(pin
B14
)I
Ana
logu
e0V
to 6
.1V
12-b
it un
sign
ed c
onve
rsio
n. T
o co
nver
t mea
sure
d vo
ltage
(Vm
) to
act
ual v
olta
ge (
Va)
use
the
equa
tion,
Va=
Vm
*1.2
20.
Def
ault
popu
latio
n: N
ot P
opul
ated
.
Mon
itor
(v)
(pin
B16
)I
Ana
logu
e0V
to 6
.1V
12-b
it un
sign
ed c
onve
rsio
n. T
o co
nver
t mea
sure
d vo
ltage
(Vm
) to
act
ual v
olta
ge (
Va)
use
the
equa
tion,
Va=
Vm
*1.2
20.
Def
ault
popu
latio
n: N
ot P
opul
ated
.

Internal signals
Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 16
®
www.pi-innovo.com
Sig
nal
I/OS
ign
al t
ype
Ran
ge
No
tes
Mon
itor
(v)
(pin
B17
)I
Ana
logu
e0V
to 1
5.02
V12
-bit
unsi
gned
con
vers
ion.
To
conv
ert m
easu
red
volta
ge(V
m)
to a
ctua
l vol
tage
(V
a) u
se th
e eq
uatio
n, V
a=V
m*3
.003
.D
efau
lt po
pula
tion:
Pop
ulat
ed.
Mon
itor
(v)
(pin
B18
)I
Ana
logu
e0V
to 1
5.02
V12
-bit
unsi
gned
con
vers
ion.
To
conv
ert m
easu
red
volta
ge(V
m)
to a
ctua
l vol
tage
(V
a) u
se th
e eq
uatio
n, V
a=V
m*3
.003
.D
efau
lt po
pula
tion:
Pop
ulat
ed.
Mon
itor
(v)
(pin
B2)
IA
nalo
gue
0V to
6.1
V12
-bit
unsi
gned
con
vers
ion.
To
conv
ert m
easu
red
volta
ge(V
m)
to a
ctua
l vol
tage
(V
a) u
se th
e eq
uatio
n, V
a=V
m*1
.220
.D
efau
lt po
pula
tion:
Not
Pop
ulat
ed.
Mon
itor
(v)
(pin
B3)
IA
nalo
gue
0V to
6.1
V12
-bit
unsi
gned
con
vers
ion.
To
conv
ert m
easu
red
volta
ge(V
m)
to a
ctua
l vol
tage
(V
a) u
se th
e eq
uatio
n, V
a=V
m*1
.220
.D
efau
lt po
pula
tion:
Not
Pop
ulat
ed.
Mon
itor
(v)
(pin
B6)
IA
nalo
gue
0V to
6.1
V12
-bit
unsi
gned
con
vers
ion.
To
conv
ert m
easu
red
volta
ge(V
m)
to a
ctua
l vol
tage
(V
a) u
se th
e eq
uatio
n, V
a=V
m*1
.220
.D
efau
lt po
pula
tion:
Not
Pop
ulat
ed.
Mon
itor
(v)
(pin
B7)
IA
nalo
gue
0V to
6.1
V12
-bit
unsi
gned
con
vers
ion.
To
conv
ert m
easu
red
volta
ge(V
m)
to a
ctua
l vol
tage
(V
a) u
se th
e eq
uatio
n, V
a=V
m*1
.220
.D
efau
lt po
pula
tion:
Not
Pop
ulat
ed.
Mon
itor
(v)
(pin
B8)
IA
nalo
gue
0V to
6.1
V12
-bit
unsi
gned
con
vers
ion.
To
conv
ert m
easu
red
volta
ge(V
m)
to a
ctua
l vol
tage
(V
a) u
se th
e eq
uatio
n, V
a=V
m*1
.220
.D
efau
lt po
pula
tion:
Not
Pop
ulat
ed.

Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 17
®
www.pi-innovo.com
Chapter 4. Operational details
4.1. ECU power ....................................................................................................... 174.2. ECU power — control ........................................................................................ 174.3. ECU power — wake-on-CAN ............................................................................. 184.4. Analog inputs .................................................................................................... 194.5. Analog inputs — relationship between sensor supplies and inputs ......................... 194.6. Analog inputs — VREF diode inputs ................................................................... 204.7. Analog inputs — temperature, internal ................................................................ 214.8. Analog outputs .................................................................................................. 214.9. Digital inputs ..................................................................................................... 214.10. Digital inputs — frequency measurement .......................................................... 224.11. Digital inputs — SENT ..................................................................................... 234.12. Digital outputs ................................................................................................. 234.13. Digital outputs — low-side ................................................................................ 234.14. Digital outputs — monitors ............................................................................... 234.15. Serial inputs and outputs .................................................................................. 244.16. Communication — CAN ................................................................................... 244.17. Communication — LIN ..................................................................................... 244.18. Memory — configuration .................................................................................. 244.19. Memory — non-volatile storage and lifetime ...................................................... 254.20. Memory — calibration capabilities ..................................................................... 254.21. System modes ................................................................................................. 254.22. Flash codes ..................................................................................................... 264.23. Floating point capabilities ................................................................................. 274.24. Customization — build options ......................................................................... 28
4.1. ECU powerThe power supply pins (VPWR A11+B20) and the ground pins (VGND A1+B9+B10) are bothrated to 20A.
The ECU VGND (pins A1+B9+B10) and sensor ground (pins A14+B15) are directly connectedtogether via a ground plane in the ECU PCB.
The ECU is designed for 12V or 24V vehicles, with various modes of operation based onthe voltage (see Table 1.1, “Specification”). The ECU is protected against reverse supplyconnection. All inputs and outputs are protected against short-to-VPWR or short-to-VGND overnormal operating range.
4.2. ECU power — controlThe ECU power arrangement is shown in Figure 4.1, “Switching arrangement for main powersupply, wake-on-CAN enabled”.

Operational details
Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 18
®
www.pi-innovo.com
Figure 4.1. Switching arrangement for main power supply, wake-on-CAN enabled
power hold control from application
External to ECUInternal to ECU
Key position (ignition sense)
PSU
power to digital core
ignition sense to application
CAN-A/B/C/DCAN messages
to application CANtransceivers
Reverse polarity protection,
voltage limiting
Low-sidedriver
Battery -ve
VPWR
Power relay
Battery +ve
Main Power Relay Control from
Application
Wake from CAN-A
The default build option supports an ignition switch. The ECU powers up when the powersupply pins (VPWR A11+B20) and key position (ignition sense) input (pin A12) are asserted.The key position voltage threshold, above which the power supply turns on, is nominally 4.0V(worst case, a minimum of 3.4V and a maximum of 4.8V). The key position (pin A12) can beread as a digital input. The application must debounce the digital input over 200 millisecondsto achieve an accurate reading.
The default build option supports wake-on-CAN. The ECU powers up when the power supplypins are asserted and the ECU receives a message on a wake-on-CAN-enabled CAN bus(see Section 4.3, “ECU power — wake-on-CAN” for more). To fully disable wake-on-CAN,ECUs can be modified with a build option.
The ECU application software can hold power to the ECU after the conditions to power upthe ECU no longer exist (e.g., the ignition sense is deasserted or CAN messages are nolonger present). This allows, for example, the application to complete non-volatile memoryprocessing. For the ECU to hold power the internal DOT enable-PSU-hold channel needs tobe asserted. Setting this internal channel high will hold power when the key position input isopened, setting it low will allow the ECU to power off when the key position input is opened.
Note
The ECU will turn on and assert power hold before the application starts to run. Theapplication must disable power hold by deasserting the internal channel DOT enable-PSU-hold when the conditions to shutdown are satisfied (for instance, the ignitionsense input is off and information to store in non-volatile information has been written).
4.3. ECU power — wake-on-CANOne CAN bus (pins A9 and A10) provides wake-on-CAN functionality. When the ECU poweris controlled using CAN messages, the ECU powers up (or wakes) when the ECU senses

Operational details
Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 19
®
www.pi-innovo.com
two bus dominant states of at most 5 microseconds, with the first dominant state followedby a recessive state of at most 5 microseconds (provided the complete dominant-recessive-dominant pattern is completed within at most 2 milliseconds). Generally this pattern is fulfilledby sending a valid CAN message.
When ECU is powered via wake-on-CAN, it is the responsibility of the application todetermine how long the ECU should remain on. In order to guarantee that the application isable to run after a wake-on-CAN event, it is recommended that the application initialize theDOT enable-PSU-hold channel to high to keep the ECU powered.
When the application has completed its desired tasks, the internal digital output DOT enable-PSU-hold should be set to low to allow the ECU to shut down. Once both the power-holdoutput and ignition input are deasserted, the platform will disable the CAN transceivers tocause the ECU to shut down.
Note
If the ECU is initially powered via wake-on-CAN and then the ignition input becomesactive while the application is running, the ECU will remain on while the ignition is oneven if the power-hold is disabled.
Note
The ECU does not fully support reprogramming via wake-on-CAN, i.e. reprogrammingwith no ignition input. Normally if this is attempted, the ECU will power off shortly afterreprogramming is initiated. However, it is possible to keep the ECU powered on andreprogram it successfully if a sufficient stream of CAN messages is maintained on oneof the wake-on-CAN channels.
4.4. Analog inputsThe analog inputs (pins A5, A7, A8, A15, A17, A18, B1, B4, B11 and B12) sample voltagewith varying resolution and range. See the pin information for more details. Some of theanalog inputs have additional characteristics or may not be populated by default, as detailedin the following sections.
4.5. Analog inputs — relationship betweensensor supplies and inputs
The ECU sensor supply arrangement is shown in Figure 4.2, “VREF arrangement”. The figureshows the relationship between the internal 5V reference supply and ground, the externalsensor supply and ground, and the analog inputs.

Operational details
Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 20
®
www.pi-innovo.com
Figure 4.2. VREF arrangement
5V +1%reference
Voltage trackingregulator
VoltageMonitoring0.875 scale
Sensor supply5V
Pul
l-ups
Pul
l-dow
ns
VGND
Analog input0V to 5V
RTD analog input0V to 0.416V
Sensor ground/return0V
External to ECUInternal to ECU
VRH
AIN
AIN
AIN
AD
C(P
art o
f MP
C55
34)
x12
+
-
The internal precision 5V reference supplies the reference pin on the ADC. The exact sensorvoltage being produced can be monitored on a (scaled) ADC channel. The scaling is detailedin Table 3.1, “Internal signals” and can be used to detect a short to battery or ground. Thesensor ground is a nominal 0V.
The exact voltage on analog input pins can be read on a direct (unscaled) or an indirect(scaled) ADC channel. Standard 0-5V inputs are passed directly to the ADC with no scaling.
Some analog input pins are internally pulled up to the sensor power supply (pin A6+B5). If thesensor supply is not enabled, floating inputs will fluctuate when read by the ADC. The sensorsupply must be enabled for resistance measurements made on any of these channels.
4.6. Analog inputs — VREF diode inputsThe analog inputs (B1, B4 and B12) have associated diode reference input channels thatare used to monitor the voltage drop across the pull-up diodes at the pull-up resistor.These monitors can be used for more accurate measurements on their associated channels.Figure 4.3, “VREF diode monitor arrangement” shows the relationship between the 5Vsupply, the analog input and the diode reference.
Figure 4.3. VREF diode monitor arrangement
Pul
l-up
Analog input0V to 5V
External to ECUInternal to ECU
AIN Vref diode
AIN
5V supply

Operational details
Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 21
®
www.pi-innovo.com
4.7. Analog inputs — temperature, internalThe ECU has an internal thermistor temperature sensor. The conversion from input voltage,VADC, to temperature, TSENSOR, is non-linear. Table 4.1, “Internal temperature conversion”provides nominal, median values; the minimum and maximum are within ±10% from -40°Cand up, and ±5% above 95°C.
Table 4.1. Internal temperature conversion
TSENSOR°C
VADCV
TSENSOR°C
VADCV
-40 0.144484 45 3.480803
-35 0.198075 50 3.676984
-30 0.267652 55 3.851516
-25 0.356328 60 4.005223
-20 0.467202 65 4.139518
-15 0.602969 70 4.256080
-10 0.765533 75 4.356805
-5 0.955566 80 4.443536
0 1.172141 85 4.518059
5 1.412429 90 4.581998
10 1.671849 95 4.636847
15 1.944315 100 4.683893
20 2.222815 105 4.724277
25 2.500000 110 4.758972
30 2.769285 115 4.788823
35 3.025023 120 4.814544
40 3.263090 125 4.836750
4.8. Analog outputsThe analog outputs (pins B17 and B18) drive a constant voltage into an external load. Seethe Sim-API pax_AnalogOutput block and C-API pax_dac_output() function.
The valid range of the output is between 0.5V and 4.5V. The application can detect short-to-ground and short-to-battery faults by checking if the corresponding voltage monitor indicatesit is out of the valid range.
4.9. Digital inputsThe digital inputs (pins A5, A7, A8, A15, A17, A18, B1, B4, B11 and B12) sample a digitalstate, allowing the measurement of switches or pulsing inputs. See the pin informationfor more details. Some of the digital inputs have additional characteristics or may not bepopulated by default, as detailed in the following sections.
These digital inputs are not popuated by default. To support a variety of sensors, the ECUis pre-populated with a default selection of inputs with varying voltage thresholds and pullstrengths. The inputs are not inverted.

Operational details
Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 22
®
www.pi-innovo.com
See Chapter 2, Connector pinout for more information. In some cases the default selectionwill not meet the requirements of all customers. To help, Pi can modify the ECU PCBcomponent population to adjust these characteristics as build options. Contact Pi for furtherinformation.
Note
The external signals are all low pass filtered to prevent signals of excessive frequencyfrom tying up the target processor.
4.10. Digital inputs — frequencymeasurement
The ECU measures a signal frequency and duty cycle by capturing the time of the signal'sfiltered digital edges arriving at the processor. The time between similar edges gives the cycleperiod of the signal, and the inverse of the cycle period gives the frequency of the signal. Thetime between opposing edges gives the on and off periods, and the ratio of either the on oroff period to the cycle period gives the corresponding on or off duty cycle.
Figure 4.4. Frequency measurement
Input signal
Measurement timer
Input signal period
Quantised signal period
Input signal
The filtered digital edges for each input pin are captured relative to a digital timer. The digitaltimer has two properties that affect the measurable range of frequency.
Timer frequencyEach timer counts at a fixed frequency. When the state of the filtered digital signalchanges (an edge occurs), the timer count is captured. If the state of the filtered digitalsignal changes between timer counts, then the measured frequency is quantised andless accurate. The resolution of the measured frequency can be calculated as:
where FT is the timer frequency and FS is the signal frequency.
Note that as the signal frequency increases, the measured resolution decreases. Forinstance, with a 1000 Hz input signal and 4 MHz timer, results in a resolution ofapproximately 0.25 Hz. A 10000 Hz input signal and 4 MHz time, results in a resolutionof appoximately 25 Hz.
Pins A5, A7, A8, A15, A17, A18, B1, B4, B11 and B12 use a 4MHz timer for frequencyinputs.

Operational details
Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 23
®
www.pi-innovo.com
Pins A2, A3, A4, A13, B2, B3, B6, B7, B8, B13, B14 and B16 have digtial state monitorswhich also can use a 4MHz timer for frequency measurement.
Timer sizeEach timer is free running, meaning the timer is incremented modulo N, where N is thesize of the timer. The larger N, the longer a signal cycle period that can be measured.Thus the size of the timer limits the lowest frequency that can be measured. The userguide documentation indicates measurement frequency ranges.
4.11. Digital inputs — SENTPins A5, A15 and B11 provide support for SENT sensors. To use the SENT channels, seethe C-API or Sim-API User Guide for further details.
4.12. Digital outputsThe digital outputs (pins A2, A3, A4, A13, B2, B3, B6, B7, B8, B13, B14 and B16) are acollection of low-side drivers, and are described in further detail in the following section.
4.13. Digital outputs — low-sideWith the low-side outputs (pins A2, A3, A4, A13, B2, B3, B6, B7, B8, B13, B14 and B16)the ECU switches the output pin to ground, the actuator is connected to the output pin andto VPWR.
Figure 4.5. Switching arrangement for low-side digital outputs
switch control from blockset(e.g., from digital output block)
External to ECUInternal to ECU
VPWR
VGND
LOA
D
The low-side output pins are protected against over-voltage up to 40V. These outputs candrive resistive loads at a maximum rate of 10 kHz.
4.14. Digital outputs — monitorsThe low-side digital outputs contain a mixture of monitoring circuitry that providesunconditioned diagnostic information that can be used for electrical diagnostics, such asstate, voltage, and status monitors. These monitors are available to the application asindividual analog or digital inputs.
• Drive state — digital output state monitors are provided for pins A2, A3, A4, A13, B2, B3,B6, B7, B8, B13, B14 and B16. Drive state monitors provide the driven state, on or off, ofan output pin or an internal function of the ECU. They can also be read as frequency input

Operational details
Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 24
®
www.pi-innovo.com
to measure the driven frequecy as described in Section 4.10, “Digital inputs — frequencymeasurement”.
• Voltage — voltage monitors are provided for pins A2, A3, A4, A6+B5, A13, B2, B3, B6,B7, B8, B13, B14, B16, B17 and B18. The monitors provide a voltage reading of powersupply and digital output circuits.
• Status — status monitors are provided for pins A2, A3, B7 and B8. The status monitorsindicate overtemperature and output openload OFF-state low voltage conditions.
The status monitor is normally pulled high, but will be pulled low when:
• The low-side FET is overtemperature and the input is commanded on.
• The low-side FET input is commanded off and the drain (output) is less than a thresholdbetween 1.7V max or 0.6V min (1.2V nominal).
These monitors can be used by the application to determine electrical faults. For instance, ifa digital output is turned on but the corresponding state monitor reads off, then there is likelya short or open in the circuit.
4.15. Serial inputs and outputsSome of the internal and external inputs and outputs are classed as serial. The connectorpinout tables and internal channel tables above specify whether a pin or channel is serialor not.
When a serial input is read, the measurement reflects the value of the input taken last time theapplication task ended. I.e., the value of the input is delayed by one cycle of the task period.When a serial output is set, the driven state is updated at the end of the current applicationtask. I.e., there is a delay between requesting a change in the output state, and the outputstate honoring that request.
4.16. Communication — CANThe CAN buses (pins A8+A7, A10+A9, A18+A17 and A20+A19) are implemented using high-speed CAN transceivers, compatible with J1939. The default CAN bus (pins A10+A9) has aterminating resistor fitted; the other CAN buses require external termination, by defualt.
One CAN bus (pins A9 and A10) has wake-on-CAN functionality (see Section 4.3, “ECUpower — wake-on-CAN” for more details).
Note
Some CAN busses (pins A7, A8, A17 and A18) are driven by an ASIC internal tothe ECU which has limited functionality. Currently, these busses do not support CCP,J1939 or ISO Diagnostics.
4.17. Communication — LINThe M110 is designed to support LIN communications. However, this option is not yetsupported. Contact Pi for further information.
4.18. Memory — configurationThe ECU supports different memory configurations for application, calibration and RAM sizes(see Section 4.20, “Memory — calibration capabilities”).

Operational details
Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 25
®
www.pi-innovo.com
Table 4.2. Memory configurations supported
Configuration App size(KiB)
Cal size(KiB)
RAMsize(KiB)
ExternalRAM
required?
Run-timecalibrationsupported?
A a 512 32 32 N Y
B 512 48 16 N Y
C 512 16 48 N Y
D 512 256 64 N Na If an OpenECU target that supports memory configuration is loaded with an application in which no suchconfiguration has been specified, then configuration A will be used as the default.
4.19. Memory — non-volatile storage andlifetime
The ECU supports non-volatile memory storage in Flash. Battery backed RAM is notsupported.
The processor's Flash memory is split into small and large memory blocks. The applicationand calibration are stored in large blocks, whilst DTC information, freeze frames and so onare stored in small blocks.
The largest Flash block can take up to approximately 7.5 seconds to erase. This occursin an environment where the Flash has been erased and programmed many times at itstemperature extreme. The typical erase time is smaller, especially at ambient temperatures.Reprogramming an ECU (where many large blocks would be erased), or storing DTCinformation across power cycles, can therefore take some time. Users and applicationsshould take this into consideration.
The minimum number of erase cycles is approximately 1,000 for large Flash blocks and100,000 for small Flash blocks. This occurs in an environment where the Flash has beenerased and programmed many times at its temperature extreme. The typical number of erasecycles is larger, especially at ambient temperatures.
The minimum data retention is approximately 5 years for blocks which have been erasedless than 100,000 times, and approximately 20 years for blocks which have been erasedless than 1,000 times.
The information about the Flash has been taken from Freescale's MPC5534 MicrocontrollerData Sheet document, revision 4 (dated Mar 2008).
4.20. Memory — calibration capabilitiesThe ECU supports both offline calibration (where all of the ECU's calibration memory isreprogrammed whilst the application is stopped) and online calibration (where individualcalibrations can be modified whilst the application runs). These calibration capabilities aresupported through the meomory configurations listed above:
4.21. System modesThe ECU can run in one of two system modes: reprogramming mode and application mode.In reprogramming mode, the ECU can be reprogrammed with application software from acalibration tool. In application mode, the ECU runs the programmed application software.

Operational details
Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 26
®
www.pi-innovo.com
The ECU selects which mode to enter when it is powered up by measuring the external FEPSA16 pin.
Table 4.3. System mode selection
FEPS (A16) Voltage System mode
< -18V Enter reprogramming mode. Use the default CCP settings.
Otherwise Enter application mode if valid application software haspreviously been programmed, otherwise enter reprogrammingmode.
Note
When reprogramming an M110 over CAN ensure that the unit is operating safely withinthe specified operating limits. Care should be taken to not reprogram at the specifiedextremes of temperature or voltage.
4.22. Flash codesThe ECU has a dedicated external pin (pin B19) for flashing a lamp. The LED should beconnected between VPWR (pin A11+B20) and pin B19.
Note
Pin B19 presents approximately 570 Ohms plus a diode drop (totalling from 0.5V to1.4V) to ground in the on state and will typically sink 20mA when connected to an LEDto VPWR; it is not capable of lighting a bulb.
The flash sequence represents a set of codes. Each code is a three digit number, whereeach digit is flashed a number of times equal to its value. An example would be the flashsequence for code 113. The flash sequence is broken down into a series of marks, or onand off pulses as follows:
Figure 4.6. Flash code sequence
Start of log mark d3 (3)d1 (1) d2 (1)
End code mark
Digit mark
Digit mark
Digit mark
On
Off
Each of the marks lasts for a specific duration:
Table 4.4. Flash code example
Mark Duration and meaning
Start of log mark 3s — marks the start of the flash code list
Digit mark 1s — marks the start of a digit

Operational details
Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 27
®
www.pi-innovo.com
Mark Duration and meaning
dn ns — n digits, where the output is turned OFF for 0.5second, then ON for 0.5 seconds, n times
End code mark 3s — marks the end of a code (i.e., end of 3 digits)
After the end code mark, the ECU will either flash the next code, or return to the start of thelist and flash the first code. The ECU always has at least one code to flash.
Each code represents information about the ECU state. If there is no flash sequence, or amalformed flash sequence, then the ECU is malfunctioning. Otherwise, the flash sequencewill represent one of the following codes:
Table 4.5. Flash codes
Code Meaning
111 In application mode — no other condition has been detected.
112 In reprogramming mode with the FEPS pin negative.
113 In reprogramming mode with the FEPS pin high.
114 In reprogramming mode via a FEPS-less reprogramming request.
115 In reprogramming mode because no valid application software exists.
116 In reprogramming mode due to FEPS pin electrical failure.
117 In reprogramming mode due to repeated reset during application mode.
118 In reprogramming mode due to failed application checksum tests.
128 In reprogramming mode due to failed memory check tests.
119 In reprogramming mode due to a FEPS-less ISO reprogramming request.
121 In reprogramming mode due to an unknown failure.
123 In reprogramming mode due to a watchdog reset.
222 In reprogramming mode due to the application not having a valid license.
4.23. Floating point capabilitiesThe ECU closely adheres to the IEEE-754 for floating point numbers.
When using Simulink, floating point Simulink models are supported — all calculations areperformed using single-precision (even if the model uses double-precision, the ECU performscalculations using single-precision).
When using the C-API, floating point applications are supported — all calculations areperformed using single or double precision, as determined by the application code (althoughdouble precision will incur some software overhead — see the compiler reference manualfor further details).
The rounding mode is set to round-to-nearest. In some conditions, the ECU will not adhereto the IEEE-754 standard:
Table 4.6. Floating point conditions
Condition Result
Underflow The result of a calculation underflow is ±0. The sign is based onthe signs of the operands.

Operational details
Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 28
®
www.pi-innovo.com
Condition Result
Overflow
Divide by zero
The result of a calculation overflow is ±max where max isapproximately 3.4 × 1038. The sign is based on the signs of theoperands.
The ECU does not generate ±Inf, NaN or a denormalised number as the result of acalculation.
4.24. Customization — build optionsTo support a variety of sensors and actuators, the ECU is pre-populated with a defaultselection of components with varying voltage range, pull strengths, filtering and othercharacteristics. In some cases the default component selection will not meet the requirementsof all customers. Within design constraints, Pi can modify the ECU components to adjustthese characteristics as build options. Contact Pi for further information.

Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 29
®
www.pi-innovo.com
Chapter 5. DimensionsThe ECU has the following mechanical dimensions (mm):
Figure 5.1. Outline of physical dimensions
130.25
137.
15
101.6
60.8
2
43.6
2
Pocket APocket B
Pocket A
Pocket B

Copyright 2020, Pi Innovo. All Rights ReservedDocument number: 29T-068883TK-xEReleased at version: 2.9.0 (r2020-1) 30
®
www.pi-innovo.com
Appendix A. Contact informationIf you have questions, or are experiencing issues with OpenECU please see the FAQwebsite:
websiteSupport.OpenECU.com [http://Support.OpenECU.com]
If you still have questions after searching through the FAQ, or want to discuss sales orproposals, you can contact main office:
Tel+1 734 656 0140
Fax+1 734 656 0141
during normal working hours (Mon to Fri, 0930 to 1700 EST).