M. Zareinejad 1. 2 Outline # Sensors –––– Sensor types Sensor examples #Actuators Actuator...
37
Haptics and Virtual Reality M. Zareinejad Lecture 3: Sensors & Actuators 1
-
Upload
della-carroll -
Category
Documents
-
view
238 -
download
2
Transcript of M. Zareinejad 1. 2 Outline # Sensors –––– Sensor types Sensor examples #Actuators Actuator...

1
Haptics and Virtual Reality
M. Zareinejad
Lecture 3:
Sensors & Actuators

2
Outline
# Sensors
–
–
Sensor types
Sensor examples
#ActuatorsActuator types
Actuator examples
–
–

3
The Haptic System
Hum
an

4
Passive & Active joint
5
Sensor Applications
Eye tracking
Head tracking
Body tracking
Hand tracking– Most important for typical haptic interfaces

6
Sensor types
Magnetic
Optical
Acoustic
Inertial
Mechanical– Most important for typical haptic interfaces

7
Mechanical Trackers
Ground-based linkages most commonly used
Position Sensors–
–
digital: optical encoders
analog: Hall-effect (magnetic)

8
Optical Encoders
How do they work?–
–
A focused beam of light aimed at a matchedphotodetector is interrupted periodically by a codedpattern on a disk
Produces a number of pulses per revolution (Lots ofpulses = high cost)
Quantization problems at low speeds
Absolute vs. Incremental
EmitterDetector

9
Optical Encoders
Absolute vs. Incremental
Resolution?

10
Optical Encoders
Phase-quadrature encoder
2 channels, 90° out of phase– allows sensing of direction of rotation

11
Encoder States & Decoding

12
Hall-Effect Sensors
How do they work?– A small transverse voltage is generated across a
current-carrying conductor in the presence of amagnetic field
(Discovery made in1879, but not usefuluntil the advent ofsemiconductortechnology.)

13
Hall-Effect Sensors
Amount of voltage output related to thestrength of magnetic field passing through.
Linear over small range of motion– Need to be calibrated
Affected by temperature, other magneticobjects in the environments
Rh IBt
Vh =
Vh = Hall voltage
Rh = Hall coefficient
I = Current
B = Magnetic flux density
t = Element thickness

14
Hall-Effect Sensors
Rh IB
tVh =
Vh = Hall voltage
Rh = Hall coefficient
I = Current
B = Magnetic flux density
t = Element thickness
The voltage varies sinusoidally with rotation angle
Resolution?

15
Potentiometers

16
Potentiometers
Resolution?

17
Acoustic Tracker
Speaker Microphone

18
Acoustic Tracker

19
Magnetic Tracker

20
Magnetic Tracker

21
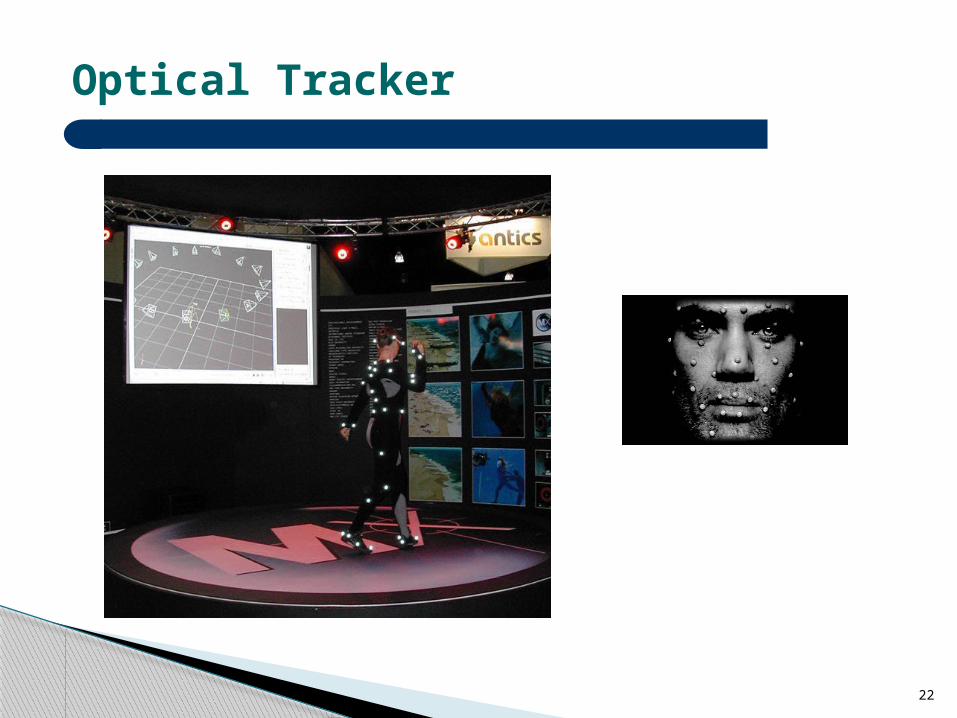
Optical Tracker
Inside-Looking-Out Outside-Looking-In
22
Optical Tracker

23
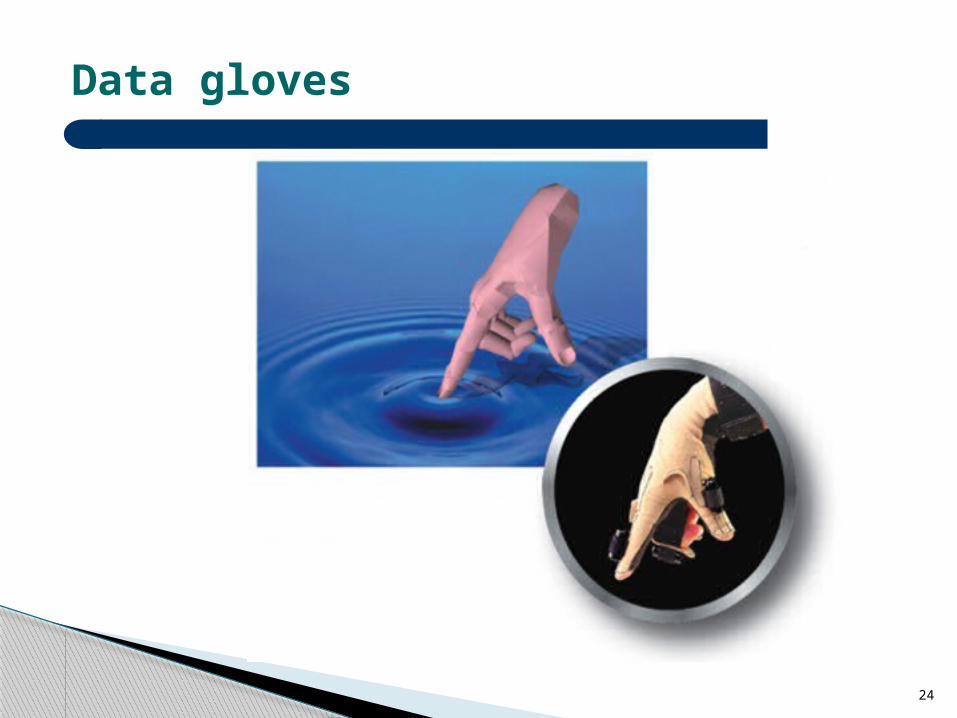
Data gloves
24
Data gloves

25
Measuring Velocity
Differentiate position–
–
advantage: use same sensor as position sensor
disadvantage: get noise signal
Alternative– for encoders, measure time between ticks

26
Digital differentiation
Many different methods
Simple Example:–
–
–
Average 20 readings = P1
Average next 20 readings = P2
where t is the the period of the servo loop
DifferentiationIncreases noise
P1- P2t
V =

27
Time-between-ticks
use a special chip that measures time between ticks
– Fares poorly at high velocities
pt
v =
Time per ticks rather than ticks per time
Especially good to do at slow speeds–

28
Actuator Types
Electric motors DC (direct current) Brushed PM (permanent magnet)
Pneumatic Actuators

29
PM DC brushed motors
How do theywork?–
–
Rotating armaturewith coil windingsis caused to rotaterelative to apermanent magnet
current is transmitted through brushes toarmature, and is constantly switched so that thearmature magnetic field remains fixed.

30
DC motor components

31
DC motor components

32
DC motor terms
Cogging– Tendency for torque output to ripple as the brushes
transfer power
Friction/damping– Caused by bearings and eddy currents
Stall torque– Max torque delivered by motor when operated
continuously without cooling

33
Motor Equations
Torque constant, KT
T = KT IDynamic equation
dIdt
+ RI + EV = L

34
Pneumatic Actuators
How do they work?– Compressed air pressure is used to transfer energy
from the power source to haptic interface.
Many different types
Concerns are friction and bandwidth

35
Some Terms
AD/DA–
–
analog to digital
digital to analog
Interrupt routine
Servo Loop
Servo rate– Usually needs to be >500 Hz

36
Decimal Binary Hexadecimal
0 0000 0
1 0001 1
2 0010 2
3 0011 3
4 0100 4
5 0101 5
6 0110 6
7 0111 7
8 1000 8
9 1001 9
10 1010 A
11 1011 B
12 1100 C
13 1101 D
14 1110 E
15 1111 F
D/A and A/D
Converts betweenvoltages and counts
Computer storesinformation digitally,and communicateswith the outsideworld using +/- 5Vsignals
101010101
MSB LSB

37
D/A and A/D
Converts voltages to counts and vice versa
A 12-bit card:– 212 decimal numbers (4096)
1 10 01 0 0 11 1 0 1
1 10 01 0 0 11 1 0 1
Decimal (base 10):
Binary (base 2):
Hexadecimal (base 16):
B B 2 = BB2
2994