Lulu Smoothing
26
Lulu smoothing From Wikipedia, the free encyclopedia
description
From Wikipedia, the free encyclopediaLexicographic order
Transcript of Lulu Smoothing

Lulu smoothingFrom Wikipedia, the free encyclopedia

Chapter 1
Join (topology)
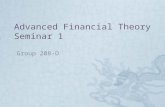
Geometric join of two line segments. The original spaces are shown in green and blue. The join is a three-dimensional solid in gray.
In topology, a field of mathematics, the join of two topological spaces A and B, often denoted by A ⋆ B , is definedto be the quotient space
(A×B × I)/R,
where I is the interval [0, 1] and R is the equivalence relation generated by
(a, b1, 0) ∼ (a, b2, 0) for all a ∈ A and b1, b2 ∈ B,
(a1, b, 1) ∼ (a2, b, 1) for all a1, a2 ∈ A and b ∈ B.
At the endpoints, this collapses A×B × {0} to A and A×B × {1} to B .Intuitively, A⋆B is formed by taking the disjoint union of the two spaces and attaching a line segment joining everypoint in A to every point in B.
2

1.1. PROPERTIES 3
1.1 Properties• The join is homeomorphic to sum of cartesian products of cones over spaces and spaces itself, where sum istaken over cartesian product of spaces:
A ⋆ B ∼= C(A)×B ∪A×B C(B)×A.
• Given basepointed CW complexes (A,a0) and (B,b0), the “reduced join”
A ⋆ B
A ⋆ {b0} ∪ {a0} ⋆ Bis homeomorphic to the reduced suspension
Σ(A ∧B)
of the smash product. Consequently, since A ⋆ {b0} ∪ {a0} ⋆ B is contractible, there is a homotopy equivalence
A ⋆ B ≃ Σ(A ∧B).
1.2 Examples• The join of subsets of n-dimensional Euclidean space A and B is homotopy equivalent to the space of paths inn-dimensional Euclidean space, beginning in A and ending in B.
• The join of a space X with a one-point space is called the cone CX of X.
• The join of a space X with S0 (the 0-dimensional sphere, or, the discrete space with two points) is called thesuspension SX of X.
• The join of the spheres Sn and Sm is the sphere Sn+m+1 .
1.3 See also• Cone (topology)
• Suspension (topology)
• Desuspension
1.4 References• Hatcher, Allen, Algebraic topology. Cambridge University Press, Cambridge, 2002. xii+544 pp. ISBN 0-521-79160-X and ISBN 0-521-79540-0
• This article incorporates material from Join on PlanetMath, which is licensed under the Creative CommonsAttribution/Share-Alike License.
• Brown, Ronald, Topology and Groupoids Section 5.7 Joins.

Chapter 2
Join and meet
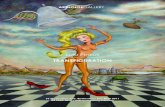
a b
a b
a b
This Hasse diagram depicts a partially ordered set with four elements - a, b, the maximal element equal to the join of a and b (a ∨ b)and the minimal element equal to the meet of a and b (a ∧ b). The join/meet of a maximal/minimal element and another element isthe maximal/minimal element and conversely the meet/join of a maximal/minimal element with another element is the other element.Thus every pair in this poset has both a meet and a join and the poset can be classified as a lattice (order theory).
4

2.1. PARTIAL ORDER APPROACH 5
In a partially ordered set P, the join and meet of a subset S are respectively the supremum (least upper bound) ofS, denoted ⋁S, and infimum (greatest lower bound) of S, denoted ⋀S. In general, the join and meet of a subset of apartially ordered set need not exist; when they do exist, they are elements of P.Join and meet can also be defined as a commutative, associative and idempotent partial binary operation on pairs ofelements from P. If a and b are elements from P, the join is denoted as a ∨ b and the meet is denoted a ∧ b.Join and meet are symmetric duals with respect to order inversion. The join/meet of a subset of a totally ordered setis simply its maximal/minimal element.A partially ordered set in which all pairs have a join is a join-semilattice. Dually, a partially ordered set in which allpairs have a meet is a meet-semilattice. A partially ordered set that is both a join-semilattice and a meet-semilatticeis a lattice. A lattice in which every subset, not just every pair, possesses a meet and a join is a complete lattice. Itis also possible to define a partial lattice, in which not all pairs have a meet or join but the operations (when defined)satisfy certain axioms.[1]
2.1 Partial order approach
Let A be a set with a partial order ≤, and let x and y be two elements in A. An element z of A is the meet (or greatestlower bound or infimum) of x and y, if the following two conditions are satisfied:
1. z ≤ x and z ≤ y (i.e., z is a lower bound of x and y).
2. For any w in A, such that w ≤ x and w ≤ y, we have w ≤ z (i.e., z is greater than or equal to any other lowerbound of x and y).
If there is a meet of x and y, then it is unique, since if both z and z′ are greatest lower bounds of x and y, then z ≤ z′and z′ ≤ z, and thus z = z′. If the meet does exist, it is denoted x ∧ y. Some pairs of elements in A may lack a meet,either since they have no lower bound at all, or since none of their lower bounds is greater than all the others. If allpairs of elements have meets, then the meet is a binary operation on A, and it is easy to see that this operation fulfillsthe following three conditions: For any elements x, y, and z in A,
a. x ∧ y = y ∧ x (commutativity),b. x ∧ (y ∧ z) = (x ∧ y) ∧ z (associativity), andc. x ∧ x = x (idempotency).
2.2 Universal algebra approach
By definition, a binary operation ∧ on a set A is a meet, if it satisfies the three conditions a, b, and c. The pair (A,∧)then is a meet-semilattice. Moreover, we then may define a binary relation ≤ on A, by stating that x ≤ y if and onlyif x ∧ y = x. In fact, this relation is a partial order on A. Indeed, for any elements x, y, and z in A,
• x ≤ x, since x ∧ x = x by c;
• if x ≤ y and y ≤ x, then x = x ∧ y = y ∧ x = y by a; and
• if x ≤ y and y ≤ z, then x ≤ z, since then x ∧ z = (x ∧ y) ∧ z = x ∧ (y ∧ z) = x ∧ y = x by b.
Note that both meets and joins equally satisfy this definition: a couple of associated meet and join operations yieldpartial orders which are the reverse of each other. When choosing one of these orders as the main ones, one also fixeswhich operation is considered a meet (the one giving the same order) and which is considered a join (the other one).
2.3 Equivalence of approaches
If (A,≤) is a partially ordered set, such that each pair of elements in A has a meet, then indeed x ∧ y = x if and onlyif x ≤ y, since in the latter case indeed x is a lower bound of x and y, and since clearly x is the greatest lower bound if

6 CHAPTER 2. JOIN AND MEET
and only if it is a lower bound. Thus, the partial order defined by the meet in the universal algebra approach coincideswith the original partial order.Conversely, if (A,∧) is a meet-semilattice, and the partial order ≤ is defined as in the universal algebra approach, andz = x ∧ y for some elements x and y in A, then z is the greatest lower bound of x and y with respect to ≤, since
z ∧ x = x ∧ z = x ∧ (x ∧ y) = (x ∧ x) ∧ y = x ∧ y = z
and therefore z ≤ x. Similarly, z ≤ y, and if w is another lower bound of x and y, then w ∧ x = w ∧ y = w, whence
w ∧ z = w ∧ (x ∧ y) = (w ∧ x) ∧ y = w ∧ y = w.
Thus, there is a meet defined by the partial order defined by the original meet, and the two meets coincide.In other words, the two approaches yield essentially equivalent concepts, a set equipped with both a binary relationand a binary operation, such that each one of these structures determines the other, and fulfil the conditions for partialorders or meets, respectively.
2.4 Meets of general subsets
If (A,∧) is a meet-semilattice, then the meet may be extended to a well-defined meet of any non-empty finite set,by the technique described in iterated binary operations. Alternatively, if the meet defines or is defined by a partialorder, some subsets of A indeed have infima with respect to this, and it is reasonable to consider such an infimum asthe meet of the subset. For non-empty finite subsets, the two approaches yield the same result, whence either may betaken as a definition of meet. In the case where each subset of A has a meet, in fact (A,≤) is a complete lattice; fordetails, see completeness (order theory).
2.5 Notes[1] Grätzer 1996, p. 52.
2.6 References• Davey, B.A.; Priestley, H.A. (2002). Introduction to Lattices and Order (2nd ed.). Cambridge: CambridgeUniversity Press. ISBN 0-521-78451-4. Zbl 1002.06001.
• Vickers, Steven (1989). Topology via Logic. Cambridge Tracts in Theoretic Computer Science 5. ISBN0-521-36062-5. Zbl 0668.54001.

Chapter 3
Lagrange bracket
Lagrange brackets are certain expressions closely related to Poisson brackets that were introduced by Joseph LouisLagrange in 1808–1810 for the purposes of mathematical formulation of classical mechanics, but unlike the Poissonbrackets, have fallen out of use.
3.1 Definition
Suppose that (q1, …, qn, p1, …, pn) is a system of canonical coordinates on a phase space. If each of them isexpressed as a function of two variables, u and v, then the Lagrange bracket of u and v is defined by the formula
[u, v]p,q =n∑
i=1
(∂qi∂u
∂pi∂v
− ∂pi∂u
∂qi∂v
).
3.2 Properties
• Lagrange brackets do not depend on the system of canonical coordinates (q, p). If (Q,P) = (Q1, …, Qn, P1,…, Pn) is another system of canonical coordinates, so that
Q = Q(q, p), P = P (q, p)
is a canonical transformation, then the Lagrange bracket is an invariant of the transformation, in thesense that
[u, v]q,p = [u, v]Q,P
Therefore, the subscripts indicating the canonical coordinates are often omitted.
• IfΩ is the symplectic form on the 2n-dimensional phase spaceW and u1,…,u2n form a system of coordinateson W, then canonical coordinates (q,p) may be expressed as functions of the coordinates u and the matrix ofthe Lagrange brackets
[ui, uj ]p,q, 1 ≤ i, j ≤ 2n
7

8 CHAPTER 3. LAGRANGE BRACKET
represents the components of Ω, viewed as a tensor, in the coordinates u. This matrix is the inverse ofthe matrix formed by the Poisson brackets
{ui, uj}, 1 ≤ i, j ≤ 2n
of the coordinates u.
• As a corollary of the preceding properties, coordinates (Q1, …, Qn, P1, …, Pn) on a phase space are canonicalif and only if the Lagrange brackets between them have the form
[Qi, Qj ]p,q = 0, [Pi, Pj ]p,q = 0, [Qi, Pj ]p,q = −[Pj , Qi]p,q = δij .
3.3 See also• Lagrangian mechanics
• Hamiltonian mechanics
3.4 References• Cornelius Lanczos, The Variational Principles of Mechanics, Dover (1986), ISBN 0-486-65067-7.
• Iglesias, Patrick, Les origines du calcul symplectique chez Lagrange [The origins of symplectic calculus inLagrange’s work], L'Enseign. Math. (2) 44 (1998), no. 3-4, 257–277. MR 1659212
3.5 External links• Eric W. Weisstein, “Lagrange bracket”, MathWorld.
• A.P. Soldatov (2001), “Lagrange bracket”, in Hazewinkel, Michiel, Encyclopedia of Mathematics, Springer,ISBN 978-1-55608-010-4

Chapter 4
Lie bracket of vector fields
In the mathematical field of differential topology, the Lie bracket of vector fields, also known as the Jacobi–Liebracket or the commutator of vector fields, is an operator that assigns, to any two vector fields X and Y on a smoothmanifold M, a third vector field denoted [X, Y].Conceptually, the Lie bracket [X,Y] is the derivative of Y along the flow generated by X. A generalization of the Liebracket is the Lie derivative, which allows differentiation of any tensor field along the flow generated by X. The Liebracket [X,Y] equals the Lie derivative of the vector Y (which is a tensor field) along X, and is sometimes denotedLXY (read “the Lie derivative of Y along X").The Lie bracket is an R-bilinear operation and turns the set of all vector fields on the manifold M into an (infinite-dimensional) Lie algebra.The Lie bracket plays an important role in differential geometry and differential topology, for instance in the Frobeniustheorem, and is also fundamental in the geometric theory for nonlinear control systems (Isaiah 2009, pp. 20–21,nonholonomic systems; Khalil 2002, pp. 523–530, feedback linearization).
4.1 Definitions
There are three conceptually different but equivalent approaches to defining the Lie bracket:
4.1.1 Vector fields as derivations
Each vector field X on a smooth manifold M may be regarded as a differential operator acting on smooth functionsonM. Indeed, each smooth vector field X becomes a derivation on the smooth functions C∞(M) when we define X(f)to be the element of C∞(M) whose value at a point p is the directional derivative of f at p in the direction X(p).Furthermore, it is known that any derivation on C∞(M) arises in this fashion from a uniquely determined smoothvector field X.In general, the commutator δ1 ◦ δ2 − δ2 ◦ δ1 of any two derivations δ1 and δ2 is again a derivation. This can be usedto define the Lie bracket of vector fields as follows.The Lie bracket, [X,Y], of two smooth vector fields X and Y is the smooth vector field [X,Y] such that
[X,Y ](f) = X(Y (f))− Y (X(f)) all for f ∈ C∞(M).
4.1.2 Flows and limits
Let ΦXt be the flow associated with the vector field X, and let d denote the tangent map derivative operator. Then the
Lie bracket of X and Y at the point x∈M can be defined as
9

10 CHAPTER 4. LIE BRACKET OF VECTOR FIELDS
[X,Y ]x := limt→0
(dΦX−t)YΦX
t (x) − Yx
t=
ddt
∣∣∣∣t=0
(dΦX−t)YΦX
t (x)
or in terms of the Lie derivative
[X,Y ] = LXY
which is also equivalent to
[X,Y ]x :=1
2
d2dt2
∣∣∣∣t=0
(ΦY−t ◦ ΦX
−t ◦ ΦYt ◦ ΦX
t )(x) =ddt
∣∣∣∣t=0
(ΦY−√t◦ ΦX
−√t◦ ΦY√
t◦ ΦX√
t)(x)
4.1.3 In coordinates
Though neither definition of the Lie bracket depends on a choice of coordinates, in practice one often wants tocompute the bracket with respect to a coordinate system.If we have picked a coordinate chart on M with local coordinate functions {xi} , and we write ∂i = ∂
∂xi for theassociated local basis for the tangent bundle, then the vector fields can be written as
X =
n∑i=1
Xi∂i
and
Y =n∑
i=1
Y i∂i
with smooth functions Xi : M → R and Y i : M → R . Then the Lie bracket is given by
[X,Y ] :=n∑
i=1
(X(Y i)− Y (Xi)
)∂i =
n∑i=1
n∑j=1
(Xj∂jY
i − Y j∂jXi)∂i
IfM is (an open subset of)Rn, then the vector fieldsX and Y can be written as smoothmaps of the formX : M → Rn
and Y : M → Rn , and the Lie bracket [X,Y ] : M → Rn is given by
[X,Y ] := JY X − JXY
where JY and JX are the Jacobian matrices of Y and X , respectively. These n-by-n matrices are multiplied by then-vectors X and Y.
4.2 Properties
The Lie bracket of vector fields equips the real vector space V = Γ(TM) of all vector fields on M (i.e., smoothsections of the tangent bundle TM ofM ) with the structure of a Lie algebra, i.e., [·,·] is a map from V × V to Vwith the following properties
• [·, ·] is R-bilinear

4.3. EXAMPLES 11
• [X,Y ] = −[Y,X]
• [X, [Y, Z]] + [Z, [X,Y ]] + [Y, [Z,X]] = 0. This is the Jacobi identity.
An immediate consequence of the second property is that [X,X] = 0 for any X .Furthermore, there is a "product rule" for Lie brackets. Given a smooth real-valued function f defined on M and avector field Y onM, we have a new vector field fY, defined by multiplying the vector Yx with the number f(x), at eachpoint x∈M. The Lie bracket of X and fY is then given by
• [X, fY ] = X(f)Y + f [X,Y ]
(where on the right-hand side we multiply the function X(f) with the vector field Y, and the function f with the vectorfield [X,Y]). This turns the vector fields with the Lie bracket into a Lie algebroid.We also have the following fact:Theorem:[X,Y ] = 0 iff the flows of X and Y commute locally, i.e. iff for every x∈M and all sufficiently small real numbers s,t we have (ΦY
t ΦXs )(x) = (ΦX
s ΦYt )(x) .
4.3 Examples
For a Lie group G, the corresponding Lie algebra is the tangent space at the identity, which can be identified with theleft invariant vector fields on G. The Lie bracket of the Lie algebra is then the Lie bracket of the left invariant vectorfields, which is also left invariant.For a matrix Lie group, smooth vector fields can be locally represented in the corresponding Lie algebra. Since theLie algebra associated with a Lie group is isomorphic to the group’s tangent space at the identity, elements of the Liealgebra of a matrix Lie group are also matrices. Hence the Jacobi–Lie bracket corresponds to the usual commutatorfor a matrix group:
[X,Y ] = XY − Y X
where juxtaposition indicates matrix multiplication.
4.4 Applications
The Jacobi–Lie bracket is essential to proving small-time local controllability (STLC) for driftless affine controlsystems.
4.5 Generalizations
As mentioned above, the Lie derivative can be seen as a generalization of the Lie bracket. Another generalization ofthe Lie bracket (to vector-valued differential forms) is the Frölicher–Nijenhuis bracket.
4.6 References
• Hazewinkel, Michiel, ed. (2001), “Lie bracket”, Encyclopedia of Mathematics, Springer, ISBN 978-1-55608-010-4
• Isaiah, Pantelis (2009), “Controlled parking [Ask the experts]", IEEE Control Systems Magazine 29 (3): 17–21,132, doi:10.1109/MCS.2009.932394

12 CHAPTER 4. LIE BRACKET OF VECTOR FIELDS
• Khalil, H.K. (2002), Nonlinear Systems (3rd ed.), Upper Saddle River, NJ: Prentice Hall, ISBN 0-13-067389-7
• Kolář, I., Michor, P., and Slovák, J. (1993), Natural operations in differential geometry, Springer-Verlag Ex-tensive discussion of Lie brackets, and the general theory of Lie derivatives.
• Lang, S. (1995), Differential and Riemannian manifolds, Springer-Verlag, ISBN 978-0-387-94338-1 For gen-eralizations to infinite dimensions.
• Lewis, Andrew D., Notes on (Nonlinear) Control Theory (PDF)
• Warner, Frank (1983) [1971], Foundations of differentiable manifolds and Lie groups, New York-Berlin:Springer-Verlag, ISBN 0-387-90894-3

Chapter 5
Logic alphabet
The logic alphabet, also called the X-stem Logic Alphabet (XLA), constitutes an iconic set of symbols that system-atically represents the sixteen possible binary truth functions of logic. The logic alphabet was developed by SheaZellweger. The major emphasis of his iconic “logic alphabet” is to provide a more cognitively ergonomic notation forlogic. Zellweger’s visually iconic systemmore readily reveals, to the novice and expert alike, the underlying symmetryrelationships and geometric properties of the sixteen binary connectives within Boolean algebra.
5.1 Truth functions
Truth functions are functions from sequences of truth values to truth values. A unary truth function, for example,takes a single truth value and maps it onto another truth value. Similarly, a binary truth function maps ordered pairsof truth values onto truth values, while a ternary truth function maps ordered triples of truth values onto truth values,and so on.In the unary case, there are two possible inputs, viz. T and F, and thus four possible unary truth functions: onemapping T to T and F to F, one mapping T to F and F to F, one mapping T to T and F to T, and finally one mappingT to F and F to T, this last one corresponding to the familiar operation of logical negation. In the form of a table,the four unary truth functions may be represented as follows.In the binary case, there are four possible inputs, viz. (T,T), (T,F), (F,T), and (F,F), thus yielding sixteen possiblebinary truth functions. Quite generally, for any number n, there are 22n possible n-ary truth functions. The sixteenpossible binary truth functions are listed in the table below.
5.2 Content
Dr. Zellweger’s logic alphabet offers a visually systematic way of representing each of the sixteen binary truth func-tions. The idea behind the logic alphabet is to first represent the sixteen binary truth functions in the form of a squarematrix rather than the more familiar tabular format seen in the table above, and then to assign a letter shape to eachof these matrices. Letter shapes are derived from the distribution of Ts in the matrix. When drawing a logic symbol,one passes through each square with assigned F values while stopping in a square with assigned T values. In theextreme examples, the symbol for tautology is a X (stops in all four squares), while the symbol for contradiction isan O (passing through all squares without stopping). The square matrix corresponding to each binary truth function,as well as its corresponding letter shape, are displayed in the table below.
5.3 Significance
The interest of the logic alphabet lies in its aesthetic, symmetric, and geometric qualities. These qualities combineto allow an individual to more easily, rapidly and visually manipulate the relationships between entire truth tables. Alogic operation performed on a two dimensional logic alphabet connective, with its geometric qualities, produces asymmetry transformation. When a symmetry transformation occurs, each input symbol, without any further thought,
13

14 CHAPTER 5. LOGIC ALPHABET
immediately changes into the correct output symbol. For example, by reflecting the symbol for NAND (viz. 'h')across the vertical axis we produce the symbol for ←, whereas by reflecting it across the horizontal axis we producethe symbol for →, and by reflecting it across both the horizontal and vertical axes we produce the symbol for ∨.Similar symmetry transformations can be obtained by operating upon the other symbols.In effect, the X-stem Logic Alphabet is derived from three disciplines that have been stacked and combined: (1)mathematics, (2) logic, and (3) semiotics. This happens because, in keeping with the mathelogical semiotics, theconnectives have been custom designed in the form of geometric letter shapes that serve as iconic replicas of theircorresponding square-framed truth tables. Logic cannot do it alone. Logic is sandwiched between mathematics andsemiotics. Indeed, Zellweger has constructed intriguing structures involving the symbols of the logic alphabet onthe basis of these symmetries ( ). The considerable aesthetic appeal of the logic alphabet has led to exhibitions ofZellweger’s work at the Museum of Jurassic Technology in Los Angeles, among other places.The value of the logic alphabet lies in its use as a visually simpler pedagogical tool than the traditional system for logicnotation. The logic alphabet eases the introduction to the fundamentals of logic, especially for children, at much earlierstages of cognitive development. Because the logic notation system, in current use today, is so deeply embedded in ourcomputer culture, the “logic alphabets” adoption and value by the field of logic itself, at this juncture, is questionable.Additionally, systems of natural deduction, for example, generally require introduction and elimination rules for eachconnective, meaning that the use of all sixteen binary connectives would result in a highly complex proof system.Various subsets of the sixteen binary connectives (e.g., {∨,&,→,~}, {∨,~}, {&, ~}, {→,~}) are themselves functionallycomplete in that they suffice to define the remaining connectives. In fact, both NAND and NOR are sole sufficientoperators, meaning that the remaining connectives can all be defined solely in terms of either of them. Nonetheless,the logic alphabet’s 2-dimensional geometric letter shapes along with its group symmetry properties can help ease thelearning curve for children and adult students alike, as they become familiar with the interrelations and operations onall 16 binary connectives. Giving children and students this advantage is a decided gain.
5.4 See also• Polish notation
• Propositional logic
• Boolean function
• Boolean algebra (logic)
• Logic gate
5.5 External links• Page dedicated to Zellweger’s logic alphabet
• Exhibition in a small museum: Flickr photopage, including a discussion between Tilman Piesk and probablyShea Zellweger

Chapter 6
Logical consequence
“Entailment” redirects here. For other uses, see Entail (disambiguation).“Therefore” redirects here. For the therefore symbol (∴), see Therefore sign.“Logical implication” redirects here. For the binary connective, see Material conditional.
Logical consequence (also entailment) is one of the most fundamental concepts in logic. It is the relationship be-tween statements that holds true when one logically “follows from” one or more others. A valid logical argumentis one in which the conclusions follow from its premises, and its conclusions are consequences of its premises.The philosophical analysis of logical consequence involves asking, 'in what sense does a conclusion follow fromits premises?' and 'what does it mean for a conclusion to be a consequence of premises?'[1] All of philosophical logiccan be thought of as providing accounts of the nature of logical consequence, as well as logical truth.[2]
Logical consequence is taken to be both necessary and formal with examples explicated using models and proofs.[1]A sentence is said to be a logical consequence of a set of sentences, for a given language, if and only if, using logicalone (i.e. without regard to any interpretations of the sentences) the sentence must be true if every sentence in theset were to be true.[3]
Logiciansmake precise accounts of logical consequence with respect to a given languageL by constructing a deductivesystem for L , or by formalizing the intended semantics for L . Alfred Tarski highlighted three salient features forwhich any adequate characterization of logical consequence needs to account: 1) that the logical consequence relationrelies on the logical form of the sentences involved, 2) that the relation is a priori, i.e. it can be determined whetheror not it holds without regard to sense experience, and 3) that the relation has a modal component.[3]
6.1 Formal accounts
Themost widely prevailing view on how to best account for logical consequence is to appeal to formality. This is to saythat whether statements follow from one another logically depends on the structure or logical form of the statementswithout regard to the contents of that form.Syntactic accounts of logical consequence rely on schemes using inference rules. For instance, we can express thelogical form of a valid argument as “AllA areB . All C are A . Therefore, All C areB .” This argument is formallyvalid, because every instance of arguments constructed using this scheme are valid.This is in contrast to an argument like “Fred is Mike’s brother’s son. Therefore Fred is Mike’s nephew.” Since thisargument depends on the meanings of the words “brother”, “son”, and “nephew”, the statement “Fred is Mike’snephew” is a so-called material consequence of “Fred is Mike’s brother’s son,” not a formal consequence. A formalconsequence must be true in all cases, however this is an incomplete definition of formal consequence, since even theargument " P is Q 's brother’s son, therefore P is Q 's nephew” is valid in all cases, but is not a formal argument.[1]
15

16 CHAPTER 6. LOGICAL CONSEQUENCE
6.2 A priori property of logical consequence
If you know thatQ follows logically fromP no information about the possible interpretations ofP orQwill affect thatknowledge. Our knowledge thatQ is a logical consequence of P cannot be influenced by empirical knowledge.[1] De-ductively valid arguments can be known to be so without recourse to experience, so they must be knowable a priori.[1]However, formality alone does not guarantee that logical consequence is not influenced by empirical knowledge. Sothe a priori property of logical consequence is considered to be independent of formality.[1]
6.3 Proofs and models
The two prevailing techniques for providing accounts of logical consequence involve expressing the concept in termsof proofs and via models. The study of the syntactic consequence (of a logic) is called (its) proof theory whereas thestudy of (its) semantic consequence is called (its) model theory.[4]
6.3.1 Syntactic consequence
See also: ∴ and ⊢
A formula A is a syntactic consequence[5][6][7][8] within some formal system FS of a set Γ of formulas if there is aformal proof in FS of A from the set Γ .
Γ ⊢FS A
Syntactic consequence does not depend on any interpretation of the formal system.[9]
6.3.2 Semantic consequence
See also: ⊨
A formula A is a semantic consequence within some formal system FS of a set of statements Γ
Γ |=FS A,
if and only if there is no model I in which all members of Γ are true and A is false.[10] Or, in other words, the set ofthe interpretations that make all members of Γ true is a subset of the set of the interpretations that make A true.
6.4 Modal accounts
Modal accounts of logical consequence are variations on the following basic idea:
Γ ⊢ A is true if and only if it is necessary that if all of the elements of Γ are true, then A is true.
Alternatively (and, most would say, equivalently):
Γ ⊢ A is true if and only if it is impossible for all of the elements of Γ to be true and A false.
Such accounts are called “modal” because they appeal to the modal notions of logical necessity and logical possibility.'It is necessary that' is often expressed as a universal quantifier over possible worlds, so that the accounts above translateas:

6.5. SEE ALSO 17
Γ ⊢ A is true if and only if there is no possible world at which all of the elements of Γ are true and A isfalse (untrue).
Consider the modal account in terms of the argument given as an example above:
All frogs are green.Kermit is a frog.Therefore, Kermit is green.
The conclusion is a logical consequence of the premises because we can't imagine a possible world where (a) all frogsare green; (b) Kermit is a frog; and (c) Kermit is not green.
6.4.1 Modal-formal accounts
Modal-formal accounts of logical consequence combine the modal and formal accounts above, yielding variations onthe following basic idea:
Γ ⊢ A if and only if it is impossible for an argument with the same logical form as Γ / A to have truepremises and a false conclusion.
6.4.2 Warrant-based accounts
The accounts considered above are all “truth-preservational,” in that they all assume that the characteristic feature of agood inference is that it never allows one to move from true premises to an untrue conclusion. As an alternative, somehave proposed "warrant-preservational” accounts, according to which the characteristic feature of a good inferenceis that it never allows one to move from justifiably assertible premises to a conclusion that is not justifiably assertible.This is (roughly) the account favored by intuitionists such as Michael Dummett.
6.4.3 Non-monotonic logical consequence
Main article: Non-monotonic logic
The accounts discussed above all yield monotonic consequence relations, i.e. ones such that if A is a consequence ofΓ , then A is a consequence of any superset of Γ . It is also possible to specify non-monotonic consequence relationsto capture the idea that, e.g., 'Tweety can fly' is a logical consequence of
{Birds can typically fly, Tweety is a bird}
but not of
{Birds can typically fly, Tweety is a bird, Tweety is a penguin}.
For more on this, see Belief revision#Non-monotonic inference relation.
6.5 See also
6.6 Notes[1] Beall, JC and Restall, Greg, Logical Consequence The Stanford Encyclopedia of Philosophy (Fall 2009 Edition), Edward
N. Zalta (ed.).
[2] Quine, Willard Van Orman, Philosophy of logic

18 CHAPTER 6. LOGICAL CONSEQUENCE
[3] McKeon, Matthew, Logical Consequence Internet Encyclopedia of Philosophy.
[4] Kosta Dosen (1996). “Logical consequence: a turn in style”. In Maria Luisa Dalla Chiara, Kees Doets, Daniele Mundici,Johan van Benthem. Logic and Scientific Methods: Volume One of the Tenth International Congress of Logic, Methodologyand Philosophy of Science, Florence, August 1995. Springer. p. 292. ISBN 978-0-7923-4383-7.
[5] Dummett, Michael (1993) Frege: philosophy of language Harvard University Press, p.82ff
[6] Lear, Jonathan (1986) Aristotle and Logical Theory Cambridge University Press, 136p.
[7] Creath, Richard, and Friedman, Michael (2007) The Cambridge companion to Carnap Cambridge University Press, 371p.
[8] FOLDOC: “syntactic consequence”
[9] Hunter, Geoffrey, Metalogic: An Introduction to the Metatheory of Standard First-Order Logic, University of CaliforniaPres, 1971, p. 75.
[10] Etchemendy, John, Logical consequence, The Cambridge Dictionary of Philosophy
6.7 Resources• Anderson, A.R.; Belnap, N.D., Jr. (1975), Entailment 1, Princeton, NJ: Princeton.
• Barwise, Jon; Etchemendy, John (2008), Language, Proof and Logic, Stanford: CSLI Publications.
• Brown, Frank Markham (2003), Boolean Reasoning: The Logic of Boolean Equations 1st edition, KluwerAcademic Publishers, Norwell, MA. 2nd edition, Dover Publications, Mineola, NY, 2003.
• Davis, Martin, (editor) (1965), The Undecidable, Basic Papers on Undecidable Propositions, Unsolvable Prob-lems And Computable Functions, New York: Raven Press. Papers include those by Gödel, Church, Rosser,Kleene, and Post.
• Dummett, Michael (1991), The Logical Basis of Metaphysics, Harvard University Press.
• Edgington, Dorothy (2001), Conditionals, Blackwell in Lou Goble (ed.), The Blackwell Guide to PhilosophicalLogic.
• Edgington, Dorothy (2006), Conditionals in Edward N. Zalta (ed.), The Stanford Encyclopedia of Philosophy.
• Etchemendy, John (1990), The Concept of Logical Consequence, Harvard University Press.
• Goble, Lou, ed. (2001), The Blackwell Guide to Philosophical Logic, Blackwell.
• Hanson, William H (1997), “The concept of logical consequence”, The Philosophical Review 106 365–409.
• Hendricks, Vincent F. (2005), Thought 2 Talk: A Crash Course in Reflection and Expression, New York: Au-tomatic Press / VIP, ISBN 87-991013-7-8
• Planchette, P. A. (2001), Logical Consequence in Goble, Lou, ed., The Blackwell Guide to Philosophical Logic.Blackwell.
• Quine, W.V. (1982), Methods of Logic, Cambridge, MA: Harvard University Press (1st ed. 1950), (2nd ed.1959), (3rd ed. 1972), (4th edition, 1982).
• Shapiro, Stewart (2002), Necessity, meaning, and rationality: the notion of logical consequence in D. Jacquette,ed., A Companion to Philosophical Logic. Blackwell.
• Tarski, Alfred (1936), On the concept of logical consequence Reprinted in Tarski, A., 1983. Logic, Semantics,Metamathematics, 2nd ed. Oxford University Press. Originally published in Polish and German.
• A paper on 'implication' from math.niu.edu, Implication
• A definition of 'implicant' AllWords
• Ryszard Wójcicki (1988). Theory of Logical Calculi: Basic Theory of Consequence Operations. Springer.ISBN 978-90-277-2785-5.

6.8. EXTERNAL LINKS 19
6.8 External links• Logical consequence entry in the Stanford Encyclopedia of Philosophy
• Logical consequence at the Indiana Philosophy Ontology Project
• Logical consequence entry in the Internet Encyclopedia of Philosophy
• Logical consequence at PhilPapers
• Hazewinkel, Michiel, ed. (2001), “Implication”, Encyclopedia of Mathematics, Springer, ISBN 978-1-55608-010-4

Chapter 7
Lulu smoothing
In signal processing, Lulu smoothing is a non-linear mathematical technique for removing impulsive noise from adata sequence such as a time series. It is a non-linear equivalent to taking a moving average (or other smoothingtechnique) of a time series, and is similar to other non-linear smoothing techniques, such as Tukey[1] or mediansmoothing.
LU smoother of width 1 applied to a noisy sequence
LULU smoothers are compared in detail to median smoothers by Jankowitz[2] and found to be superior in someaspects, particularly in mathematical properties like idempotence.
20

7.1. PROPERTIES 21
7.1 Properties
Lulu operators have a number of attractive mathematical properties, among them idempotence – meaning that re-peated application of the operator yields the same result as a single application – and co-idempotence. An interpreta-tion of idempotence is that: 'Idempotence means that there is no “noise” left in the smoothed data and co-idempotencemeans that there is no “signal” left in the residual.'[3]
When studying smoothers there are four properties that are useful to optimize:[4]
1. Effectiveness
2. Consistency
3. Stability
4. Efficiency
The operators can also be used to decompose a signal into various subcomponents[5] similar to wavelet or Fourierdecomposition.
7.2 History
Lulu smoothers were discovered by C. H. Rohwer[6][7] and have been studied for the last 30 years. Their exact andasymptotic distributions have been derived.[3]
7.3 Operation
Applying a Lulu smoother consists of repeated applications of the min and max operators over a given subintervalof the data. As with other smoothers, a width or interval must be specified. The Lulu smoothers are composed ofrepeated applications of the L (lower) and U (Upper) operators, which are defined as follows:
7.3.1 L operator
For an L operator of width n over an infinite sequence of xs (..., xj, xj₊₁,...), the operation on xj is calculated as follows:
1. Firstly we create (n + 1) mini-sequences of length (n + 1) each. Each of these mini-sequences contains theelement xj. For example for width 1, we create 2 mini-sequences of length 2 each. For width 1 these minisequences are (xj₋₁, xj) and (xj, xj₊₁). For width 2, the mini-sequences are (xj₋₂, xj₋₁, xj), (xj₋₁, xj, xj₊₁) and(xj, xj₊₁, xj₊₂). For width 2, we refer to these mini-sequences as seq₋₁, seq0 and seq₊₁
2. Thenwe take theminimumof each of themini sequences. Again for width 2 this gives: (Min(seq₋₁), Min(seq0),Min(seq₊₁)). This gives us (n + 1) numbers for each point.
3. Lastly we take the maximum of (the minimums of the mini sequences), or Max(Min(seq₋₁), Min(seq0),Min(seq₊₁)) and this becomes L(xj)
Thus for width 2, the L operator is:
L(xj) = Max(Min(seq₋₁), Min(seq0), Min(seq₊₁))
7.3.2 U Operator
This is identical to the L operator, except that the order of Min and Max is reversed, i.e. for width 2:
U(xj) = Min(Max(seq₋₁), Max(seq0), Max(seq₊₁))

22 CHAPTER 7. LULU SMOOTHING
7.3.3 Examples
Examples of the U and L operators, as well as combined UL and LU operators on a sample data set are shown in thefollowing figures.
L Smoother width 1
It can be seen that the results of the UL and LU operators can be different. The combined operators are very effectiveat removing impulsive noise, the only cases where the noise is not removed effectively is where we get multiple noisesignals very close together, in which case the filter 'sees’ the multiple noises as part of the signal.
7.4 References[1] Tukey, JW (1974). “Nonlinear (nonsuperposable) methods for smoothing data”. Cong. Rec. (EASCON): 673.
[2] Jankowitz, M.D. (2007). “Some statistical aspects of LULU smoothers”. PhD. Thesis (Stellenbosch: University of Stel-lenbosch).
[3] Conradie, WJ and deWet, T. and Jankowitz, M. (2006). “Exact and asymptotic distributions of LULU smoothers”. Journalof computational and applied mathematics (Elsevier) 186 (1): 253–267. doi:10.1016/j.cam.2005.03.073.
[4] Rohwer, Carl (2005). Nonlinear smoothing and multiresolution analysis 150. Birkhauser Basel.
[5] Fabris-Rotelli, Inger Nicolette (2009). “LULU operators on multidimensional arrays and applications”. MSc. Thesis(University of Pretoria).
[6] Rohwer, CH (1989). “Idempotent one-sided approximation of median smoothers”. Journal of Approximation Theory(Elsevier) 58 (2): 151–163. doi:10.1016/0021-9045(89)90017-8.
[7] Rohwer, CH (1999). “Projections and separators”. Quaestiones Mathematicae (Taylor & Francis) 22 (2): 219–230.doi:10.1080/16073606.1999.9632077.

7.4. REFERENCES 23
U Smoother width 1
LU smoother width 1

24 CHAPTER 7. LULU SMOOTHING
UL smoother width 1

7.5. TEXT AND IMAGE SOURCES, CONTRIBUTORS, AND LICENSES 25
7.5 Text and image sources, contributors, and licenses
7.5.1 Text• Join (topology) Source: https://en.wikipedia.org/wiki/Join_(topology)?oldid=671990230 Contributors: Jitse Niesen, Fropuff, Vivacis-samamente, Linas, BD2412, Trovatore, RonnieBrown, SmackBot, Melchoir, Alfredorestrepo, ChrisCork, Turgidson, Jay Gatsby, Loki-Clock, Lamro, MystBot, Addbot, 777sms and Anonymous: 5
• Join andmeet Source: https://en.wikipedia.org/wiki/Join_and_meet?oldid=694509323 Contributors: Tobias Bergemann, Giftlite, Lethe,Rich Farmbrough, Intgr, Arthur Rubin, Mhss, Njerseyguy, Nbarth, JRSpriggs, CBM, Harej bot, Cydebot, Blaisorblade, JoergenB, Watch-duck, Hans Adler, Addbot, DannyAsher, Omnipaedista, Erik9bot, DrilBot, Em8146, Joel B. Lewis, Khazar2, Spectral sequence, Eptified,Biggstevie and Anonymous: 7
• Lagrange bracket Source: https://en.wikipedia.org/wiki/Lagrange_bracket?oldid=607154201 Contributors: Jitse Niesen, Chris Howard,Escarbot, DavidCBryant, TXiKiBoT, Arcfrk, Legget, DumZiBoT, Addbot, Yobot, Sławomir Biały, ZéroBot and Anonymous: 3
• Lie bracket of vector fields Source: https://en.wikipedia.org/wiki/Lie_bracket_of_vector_fields?oldid=670272561 Contributors: Axel-Boldt, Chinju, TedPavlic, GregorB, SmackBot, KnowledgeOfSelf, AaronRosenberg, Silly rabbit, HLwiKi, Ohconfucius, Cronholm144,Headbomb, Felix116, RogierBrussee, Lantonov, Haseldon, Policron, Trevorgoodchild, TXiKiBoT, Geometry guy, Rybu, Mr. Stradivar-ius, Matherfocker, YouRang?, Addbot, Abovechief, Ht686rg90, Sławomir Biały, Citation bot 1, Lost-n-translation, Rausch, Tinfoilcat,Fly by Night, Slawekb, D.Lazard, Helpful Pixie Bot, Mgkrupa and Anonymous: 15
• Logic alphabet Source: https://en.wikipedia.org/wiki/Logic_alphabet?oldid=693776208Contributors: Michael Hardy, Topbanana, Giftlite,Rich Farmbrough, Kenyon, Oleg Alexandrov, BD2412, Cactus.man, Trovatore, EAderhold, Gregbard, PamD, Nick Number, Danger,Smerdis, R'n'B, Romicron, Algotr, Slysplace, ImageRemovalBot, Alksentrs, Watchduck, ResidueOfDesign, Saeed.Veradi, WilliamB-Hall, Ettrig, DrilBot, LittleWink, Gamewizard71, Masssly and Anonymous: 9
• Logical consequence Source: https://en.wikipedia.org/wiki/Logical_consequence?oldid=682050459 Contributors: Hyacinth, AnchetaWis, Giftlite, Mani1, Eric Kvaalen, BDD, Velho, Dionyziz, Macaddct1984, BD2412, Kbdank71, Koavf, Mathbot, Algebraist, Borgx,Alynna Kasmira, Arthur Rubin, SmackBot, Incnis Mrsi, Kintetsubuffalo, Bluebot, Javalenok, DMacks, Dbtfz, Grumpyyoungman01,Slakr, Inquisitus, KyleP, Igoldste, CBM, Gregbard, Cydebot, Gimmetrow, Thijs!bot, Luna Santin, Albany NY, Magioladitis, Trusilver,Maurice Carbonaro, VolkovBot, Philogo, Jamelan, Graymornings, Wemlands, Cnilep, Botev, Aplex, ClueBot, Tomas e, Sps00789, Panyd,Hans Adler, Good Olfactory, Iranway, Addbot, Niriel, AnomieBOT, RibotBOT, Minister Alkabaz, Machine Elf 1735, I dream of horses,MoreNet, Adam.a.a.golding, Tijfo098, Tziemer991, ClueBot NG, Wbm1058, Hanlon1755, ,چالاک Aubreybardo and Anonymous: 34
• Lulu smoothing Source: https://en.wikipedia.org/wiki/Lulu_smoothing?oldid=663359994 Contributors: Michael Hardy, Ijon, Bearcat,Rjwilmsi, Bgwhite, Martijn Hoekstra, AnomieBOT, Illia Connell, Paulusjharp, Mark viking and Anonymous: 1
7.5.2 Images• File:Join.svg Source: https://upload.wikimedia.org/wikipedia/commons/0/0c/Join.svgLicense: CC-BY-SA-3.0Contributors: Nomachine-readable source provided. Own work assumed (based on copyright claims). Original artist: No machine-readable author provided.Melchoir assumed (based on copyright claims).
• File:Join_and_meet.svg Source: https://upload.wikimedia.org/wikipedia/commons/8/8b/Join_and_meet.svg License: Public domainContributors: Own work Original artist: CBM
• File:LAlphabet_AND.jpg Source: https://upload.wikimedia.org/wikipedia/en/7/73/LAlphabet_AND.jpg License: Cc-by-sa-3.0 Con-tributors: ? Original artist: ?
• File:LAlphabet_AND_table.jpg Source: https://upload.wikimedia.org/wikipedia/en/c/c1/LAlphabet_AND_table.jpg License: Cc-by-sa-3.0 Contributors: ? Original artist: ?
• File:LAlphabet_F.jpg Source: https://upload.wikimedia.org/wikipedia/en/f/fd/LAlphabet_F.jpg License: Cc-by-sa-3.0 Contributors: ?Original artist: ?
• File:LAlphabet_FI.jpg Source: https://upload.wikimedia.org/wikipedia/en/d/d2/LAlphabet_FI.jpg License: Cc-by-sa-3.0 Contributors:? Original artist: ?
• File:LAlphabet_FI_table.jpg Source: https://upload.wikimedia.org/wikipedia/en/a/a3/LAlphabet_FI_table.jpg License: Cc-by-sa-3.0Contributors: ? Original artist: ?
• File:LAlphabet_F_table.jpg Source: https://upload.wikimedia.org/wikipedia/en/6/6f/LAlphabet_F_table.jpg License: Cc-by-sa-3.0Contributors: ? Original artist: ?
• File:LAlphabet_IFF.jpg Source: https://upload.wikimedia.org/wikipedia/en/2/26/LAlphabet_IFF.jpg License: Cc-by-sa-3.0 Contribu-tors: ? Original artist: ?
• File:LAlphabet_IFF_table.jpg Source: https://upload.wikimedia.org/wikipedia/en/3/30/LAlphabet_IFF_table.jpg License: Cc-by-sa-3.0 Contributors: ? Original artist: ?
• File:LAlphabet_IFTHEN.jpg Source: https://upload.wikimedia.org/wikipedia/en/c/c8/LAlphabet_IFTHEN.jpg License: Cc-by-sa-3.0 Contributors: ? Original artist: ?
• File:LAlphabet_IFTHEN_table.jpg Source: https://upload.wikimedia.org/wikipedia/en/0/0d/LAlphabet_IFTHEN_table.jpg License:Cc-by-sa-3.0 Contributors: ? Original artist: ?
• File:LAlphabet_NAND.jpg Source: https://upload.wikimedia.org/wikipedia/en/6/6e/LAlphabet_NAND.jpgLicense: Cc-by-sa-3.0Con-tributors: ? Original artist: ?
• File:LAlphabet_NAND_table.jpg Source: https://upload.wikimedia.org/wikipedia/en/c/c7/LAlphabet_NAND_table.jpg License: Cc-by-sa-3.0 Contributors: ? Original artist: ?

26 CHAPTER 7. LULU SMOOTHING
• File:LAlphabet_NFI.jpg Source: https://upload.wikimedia.org/wikipedia/en/f/f6/LAlphabet_NFI.jpg License: Cc-by-sa-3.0 Contribu-tors: ? Original artist: ?
• File:LAlphabet_NFI_table.jpg Source: https://upload.wikimedia.org/wikipedia/en/b/ba/LAlphabet_NFI_table.jpg License: Cc-by-sa-3.0 Contributors: ? Original artist: ?
• File:LAlphabet_NIF.jpg Source: https://upload.wikimedia.org/wikipedia/en/4/49/LAlphabet_NIF.jpg License: Cc-by-sa-3.0 Contrib-utors: ? Original artist: ?
• File:LAlphabet_NIF_table.jpg Source: https://upload.wikimedia.org/wikipedia/en/3/35/LAlphabet_NIF_table.jpg License: Cc-by-sa-3.0 Contributors: ? Original artist: ?
• File:LAlphabet_NOR.jpg Source: https://upload.wikimedia.org/wikipedia/en/b/b9/LAlphabet_NOR.jpg License: Cc-by-sa-3.0 Con-tributors: ? Original artist: ?
• File:LAlphabet_NOR_table.jpg Source: https://upload.wikimedia.org/wikipedia/en/1/12/LAlphabet_NOR_table.jpg License: Cc-by-sa-3.0 Contributors: ? Original artist: ?
• File:LAlphabet_NOTP.jpg Source: https://upload.wikimedia.org/wikipedia/en/a/a0/LAlphabet_NOTP.jpgLicense: Cc-by-sa-3.0Con-tributors: ? Original artist: ?
• File:LAlphabet_NOTP_table.jpg Source: https://upload.wikimedia.org/wikipedia/en/9/92/LAlphabet_NOTP_table.jpg License: Cc-by-sa-3.0 Contributors: ? Original artist: ?
• File:LAlphabet_NOTQ.jpg Source: https://upload.wikimedia.org/wikipedia/en/0/0d/LAlphabet_NOTQ.jpgLicense: Cc-by-sa-3.0Con-tributors: ? Original artist: ?
• File:LAlphabet_NOTQ_table.jpg Source: https://upload.wikimedia.org/wikipedia/en/e/e1/LAlphabet_NOTQ_table.jpg License: Cc-by-sa-3.0 Contributors: ? Original artist: ?
• File:LAlphabet_OR.jpg Source: https://upload.wikimedia.org/wikipedia/en/9/99/LAlphabet_OR.jpg License: Cc-by-sa-3.0 Contribu-tors: ? Original artist: ?
• File:LAlphabet_OR_table.jpg Source: https://upload.wikimedia.org/wikipedia/en/0/09/LAlphabet_OR_table.jpg License: Cc-by-sa-3.0 Contributors: ? Original artist: ?
• File:LAlphabet_P.jpg Source: https://upload.wikimedia.org/wikipedia/en/b/bd/LAlphabet_P.jpg License: Cc-by-sa-3.0 Contributors:? Original artist: ?
• File:LAlphabet_P_table.jpg Source: https://upload.wikimedia.org/wikipedia/en/0/0a/LAlphabet_P_table.jpg License: Cc-by-sa-3.0Contributors: ? Original artist: ?
• File:LAlphabet_Q.jpg Source: https://upload.wikimedia.org/wikipedia/en/1/13/LAlphabet_Q.jpg License: Cc-by-sa-3.0 Contributors:? Original artist: ?
• File:LAlphabet_Q_table.jpg Source: https://upload.wikimedia.org/wikipedia/en/4/47/LAlphabet_Q_table.jpg License: Cc-by-sa-3.0Contributors: ? Original artist: ?
• File:LAlphabet_T.jpg Source: https://upload.wikimedia.org/wikipedia/en/d/d4/LAlphabet_T.jpg License: Cc-by-sa-3.0 Contributors:? Original artist: ?
• File:LAlphabet_T_table.jpg Source: https://upload.wikimedia.org/wikipedia/en/b/b4/LAlphabet_T_table.jpg License: Cc-by-sa-3.0Contributors: ? Original artist: ?
• File:LAlphabet_XOR.jpg Source: https://upload.wikimedia.org/wikipedia/en/2/22/LAlphabet_XOR.jpg License: Cc-by-sa-3.0 Con-tributors: ? Original artist: ?
• File:LAlphabet_XOR_table.jpg Source: https://upload.wikimedia.org/wikipedia/en/8/82/LAlphabet_XOR_table.jpg License: Cc-by-sa-3.0 Contributors: ? Original artist: ?
• File:LSmoother_width=1.png Source: https://upload.wikimedia.org/wikipedia/commons/f/fc/LSmoother_width%3D1.pngLicense: CCBY-SA 3.0 Contributors: Own work Original artist: Paulusjharp
• File:LUSmoother_width=1.png Source: https://upload.wikimedia.org/wikipedia/commons/e/ef/LUSmoother_width%3D1.pngLicense:CC BY-SA 3.0 Contributors: Own work Original artist: Paulusjharp
• File:Logical_connectives_Hasse_diagram.svg Source: https://upload.wikimedia.org/wikipedia/commons/3/3e/Logical_connectives_Hasse_diagram.svg License: Public domain Contributors: Own work Original artist: Watchduck (a.k.a. Tilman Piesk)
• File:ULSmoother_width=1.png Source: https://upload.wikimedia.org/wikipedia/commons/e/ee/ULSmoother_width%3D1.pngLicense:CC BY-SA 3.0 Contributors: Own work Original artist: Paulusjharp
• File:USmoother_width=1.png Source: https://upload.wikimedia.org/wikipedia/commons/e/e6/USmoother_width%3D1.png License:CC BY-SA 3.0 Contributors: Own work Original artist: Paulusjharp
7.5.3 Content license• Creative Commons Attribution-Share Alike 3.0