
Loop Shaping from Bode-Nyquist to Glover-McFarlane
27
Loop Shaping from Bode-Nyquist to Glover-McFarlane K. J. Åström Department of Automatic Control, Lund University K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarlane
Transcript of Loop Shaping from Bode-Nyquist to Glover-McFarlane
Loop Shapingfrom Bode-Nyquist to Glover-McFarlane
K. J. Åström
Department of Automatic Control, Lund University
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane

Congratulations Keith
Visionary leadership in CambridgeGreat fundamental researchUseful applications with strong industrial impactSuperb studentsExcellent service to the UniversityGenuinely nice person with a glimpse in your eye
Your monumental model reduction paper
Your tour de force on H∞ theory and design methods
H∞ loop shaping (elegant theory, lots of applications)
Congratulations to scholar and a gentleman!
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane
Outline
1 Introduction2 Bode’s Ideal Cut-off Characteristic3 Loop Shaping4 H∞ Loop Shaping5 Summary
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane
Bode and Feedback Amplifiers
The repeater problem. Large variations in the gain of vacuumtube amplifiers. How to design an amplifier that can maintainstability in spite of the large gain variations?
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane
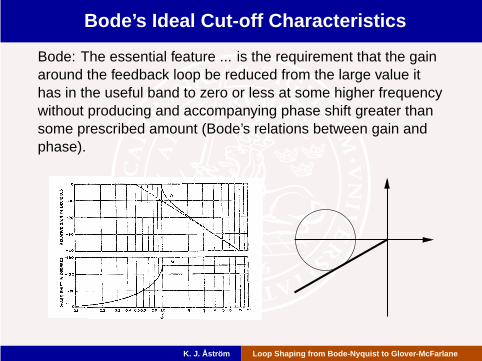
Bode’s Ideal Cut-off Characteristics
Bode: The essential feature ... is the requirement that the gainaround the feedback loop be reduced from the large value ithas in the useful band to zero or less at some higher frequencywithout producing and accompanying phase shift greater thansome prescribed amount (Bode’s relations between gain andphase).
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane
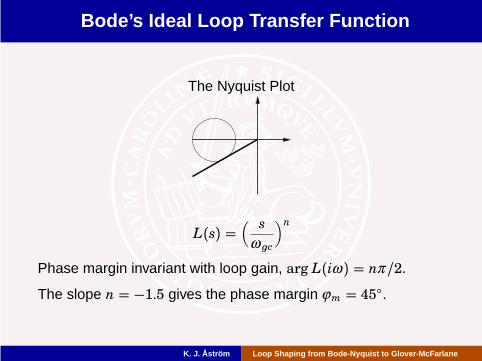
Bode’s Ideal Loop Transfer Function
The Nyquist Plot
L(s) =( s
ω�c
)n
Phase margin invariant with loop gain, arg L(iω ) = nπ /2.The slope n = −1.5 gives the phase margin ϕm = 45○.
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane

Trade-offs
Bode (page 454): If it were not for the phase restriction it wouldbe desirable to on engineering grounds to reduce gain veryrapidly. The more rapidly the gain vanishes, for example, thenarrower we need to make the region in which active designattenuation is required to prevent singing.
L(s) = sn,n = −5/3 (ϕm = 30○),−4/3 (ϕm = 60○),−1 (ϕm = 90○)
10−1
100
101
10−1
100
101
Frequency ω
pL(iω)p
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane

An Example
Consider a process with the transfer function
P(s) = k
s(s+ 1)
Assume that we would like to have a closed loop system thathas a phase margin ϕm = 45○ for large variations of the gain.Bode’s ideal loop transfer function is
L(s) = 1
s√s
Since L = PC the controller transfer function becomes (k = 1)
C(s) = L(s)P(s) =
s+ 1√s=√s+ 1√
s
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane

Step Responses
P(s) = k
s(s+ 1) , C(s) =√s+ 1√
s, k = 1, 5, 25
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
Time t
y
Time scales as k2/3 (slope is n = −3/2)
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane
Outline
1 Introduction2 Bode’s Ideal Cut-off Characteristic3 Loop Shaping4 H∞ Loop Shaping5 Summary
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane
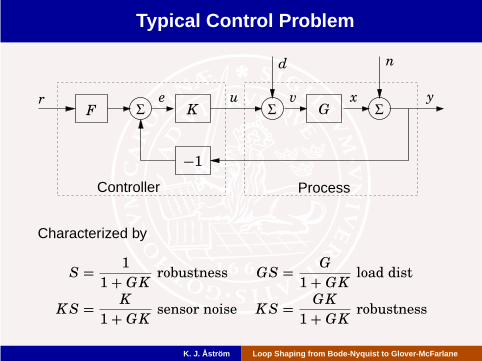
Typical Control Problem
F K G
Controller Process
−1
Σ Σ Σr e u
d
x
n
yv
Characterized by
S = 1
1+ GK robustness GS = G
1+ GK load dist
KS = K
1+ GK sensor noise KS = GK
1+ GK robustness
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane
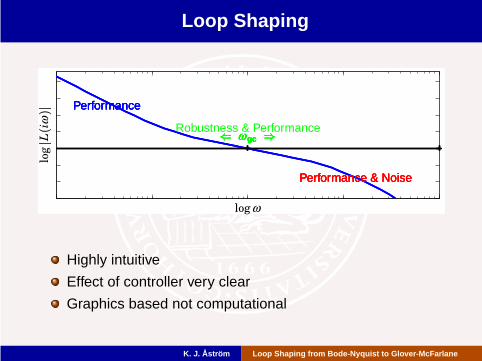
Loop Shaping
Z ω gc [Z ω gc [Z ω gc [Z ω gc [
Performance & NoisePerformance & NoisePerformance & NoisePerformance & Noise
PerformancePerformancePerformancePerformance
Robustness & Performance
logpL(iω)p
logω
Highly intuitive
Effect of controller very clear
Graphics based not computational
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane

ASEA Experience of Loop Shaping
We had designed controllers by making simplified models,applying intuition and analyzing stability by solving thecharacteristic equation. (At that time, around 1950, solving thecharacteristic equation with a mechanical calculator was itselfan ordeal.) If the system was unstable we were at a loss, wedid not know how to modify the controller to make the systemstable. The Nyquist theorem was a revolution for us. Bydrawing the Nyquist curve we got a very effective way to designthe system because we know the frequency range which wascritical and we got a good feel for how the controller should bemodified to make the system stable. We could either add acompensator or we could use extra sensor.
Erik Persson Free translation from seminar in Lund.
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane
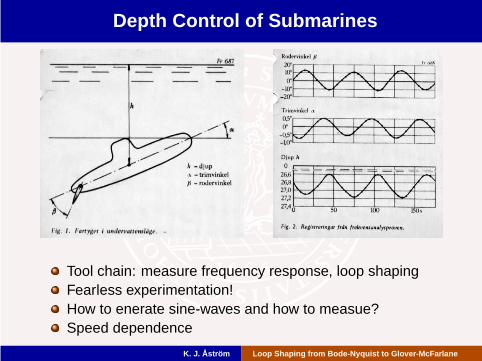
Depth Control of Submarines
Tool chain: measure frequency response, loop shapingFearless experimentation!How to enerate sine-waves and how to measue?Speed dependence
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane
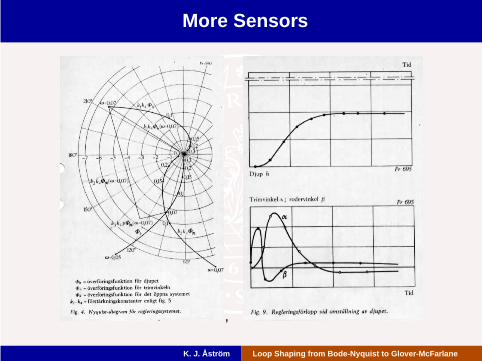
More Sensors
,
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane
More Complicated Uncertainties - Horowitz QFT
Horowitz inherited Bode’s deep insight into feedbackBode [ Guillemin [ Truxal [ Horowitz
Extended Bode’s results to more general parameter variations
Quote from Horowitz IEEE CSM 4(1984) 22–23
It is amazing how many are unaware that the primary reasonfor feedback in control is uncertainty.
And why bother with listing all the states if only one one couldactually be measured and used for feedback? If indeed therewere several available, their importance in feedback was theirability to drastically reduce the effect of sensor noise, whichwas very transparent in and input-output frequency responseformulation and terribly obscure in the state-variable form. Forthese reasons, I stayed with the input-output description.
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane

Outline
1 Introduction2 Bode’s Ideal Cut-off Characteristic3 Loop Shaping4 H∞ Loop Shaping5 Summary
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane
Loop Shaping
Sound design method
Highly intuitive
Easy to see how controller influences closed loop behavior
Easy to see how changes in the loop influenceperformance and robustness
Can deal with uncertainties
BUT
Multi-variable systems: What to plot? Graphics messy.
Gain variations easy to deal with other variations gets verymessy (QFT)
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane

Glover and McFarlane Enter the Field
What to plot? - Singular values!How to characterize uncertainties? - Coprime factorization!How to specify requirements? - Frequency weights!How to compute? - H∞!479+652 citations!
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane

A Flexible Drive
100
101
102
103
10−2
10−1
100
101
100
101
102
103
−720
−540
−360
−180
0
ω
pG(iω)p,pL(iω)|
argG(iω)
−1.5 −1 −0.5 0 0.5 1−1.5
−1
−0.5
0
0.5
ReL(iω )
ImL(iω)
G(s) = 5 (−s+ 40)(s+ 40)2(s2 + s+ 160)(s2 + 3s+ 1900) e
−0.1s
K (s) = 50
s(s+ 5)2
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane

Transfer Function G(s), S(s)G(s)
10−1
100
101
102
10−1
100
101
ω
pG(iω)|pSG(iω)|
G(s) = 5 (−s+ 40)(s+ 40)2(s2 + s+ 160)(s2 + 3s+ 1900) e
−0.1s
K (s) = 50
s(s+ 5)2
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane
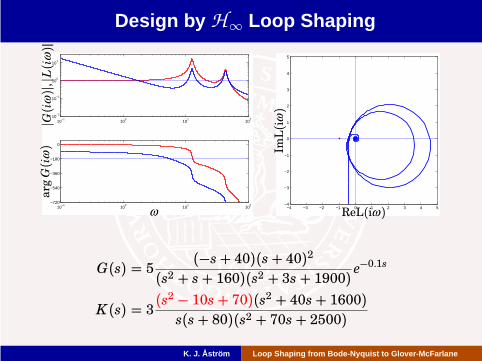
Design by H∞ Loop Shaping
10−1
100
101
102
10−2
10−1
100
101
10−1
100
101
102
−720
−540
−360
−180
0
ω
pG(iω)p,pL(iω)|
argG(i ω)
−4 −3 −2 −1 0 1 2 3 4 5−4
−3
−2
−1
0
1
2
3
4
5
ReL(iω )
ImL(iω)
G(s) = 5 (−s+ 40)(s+ 40)2(s2 + s+ 160)(s2 + 3s+ 1900) e
−0.1s
K (s) = 3(s2 − 10s+ 70)(s2 + 40s+ 1600)s(s+ 80)(s2 + 70s+ 2500)
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane

Transfer Function S(s)G(s)
10−1
100
101
102
10−2
10−1
100
101
ω
pG(iω)p,pPS(iω)|
G(s) = 5 (−s+ 40)(s+ 40)2(s2 + s+ 160)(s2 + 3s+ 1900) e
−0.1s
K (s) = 3 (s2 − 10s+ 70)(s2 + 40s+ 1600)s(s+ 80)(s2 + 70s+ 2500)
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane

Comparison 1
10−1
100
101
102
10−2
10−1
100
101
10−1
100
101
102
−720
−540
−360
−180
0
ω
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane

Comparison 2
10−1
100
101
102
10−1
100
101
ω
pGS(iω)|
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane
Outline
1 Introduction2 Bode’s Ideal Cut-off Characteristic3 Loop Shaping4 H∞ Loop Shaping5 Summary
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane

Summary
Retain the intuitive appeal of classical loop shaping
Specify load disturbance attenuation and noise injection byfrequency weights
Efficient numerical computations
Elegant mathematics
A really useful engineering design tool
The Beauty of H∞ loop shaping: Keep the SISO intuitionavoid acrobatics in Nyquist and Nichols plots and enjoy simpleways to deal with requirements and efficient computations.
A very effective design method!
Congratulations!
K. J. Åström Loop Shaping from Bode-Nyquist to Glover-McFarl ane


















