Long and short-range air navigation on spherical Earth
55
International Journal of Aviation, International Journal of Aviation, Aeronautics, and Aerospace Aeronautics, and Aerospace Volume 4 Issue 1 Article 2 1-1-2017 Long and short-range air navigation on spherical Earth Long and short-range air navigation on spherical Earth Nihad E. Daidzic AAR Aerospace Consulting, LLC, [email protected] Follow this and additional works at: https://commons.erau.edu/ijaaa Part of the Aviation Commons, Geometry and Topology Commons, Navigation, Guidance, Control and Dynamics Commons, Numerical Analysis and Computation Commons, and the Programming Languages and Compilers Commons Scholarly Commons Citation Scholarly Commons Citation Daidzic, N. E. (2017). Long and short-range air navigation on spherical Earth. International Journal of Aviation, Aeronautics, and Aerospace, 4(1). https://doi.org/10.15394/ijaaa.2017.1160 This Article is brought to you for free and open access by the Journals at Scholarly Commons. It has been accepted for inclusion in International Journal of Aviation, Aeronautics, and Aerospace by an authorized administrator of Scholarly Commons. For more information, please contact [email protected].
Transcript of Long and short-range air navigation on spherical Earth

International Journal of Aviation, International Journal of Aviation,
Aeronautics, and Aerospace Aeronautics, and Aerospace
Volume 4 Issue 1 Article 2
1-1-2017
Long and short-range air navigation on spherical Earth Long and short-range air navigation on spherical Earth
Nihad E. Daidzic AAR Aerospace Consulting, LLC, [email protected]
Follow this and additional works at: https://commons.erau.edu/ijaaa
Part of the Aviation Commons, Geometry and Topology Commons, Navigation, Guidance, Control and
Dynamics Commons, Numerical Analysis and Computation Commons, and the Programming Languages
and Compilers Commons
Scholarly Commons Citation Scholarly Commons Citation Daidzic, N. E. (2017). Long and short-range air navigation on spherical Earth. International Journal of Aviation, Aeronautics, and Aerospace, 4(1). https://doi.org/10.15394/ijaaa.2017.1160
This Article is brought to you for free and open access by the Journals at Scholarly Commons. It has been accepted for inclusion in International Journal of Aviation, Aeronautics, and Aerospace by an authorized administrator of Scholarly Commons. For more information, please contact [email protected].

As the long-range and ultra-long range non-stop commercial flights slowly
turn into reality, the accurate characterization and optimization of flight
trajectories becomes even more essential. An airplane flying non-stop between
two antipodal points on spherical Earth along the Great Circle (GC) route is
covering distance of about 10,800 NM (20,000 km) over-the-ground. Taking into
consideration winds (Daidzic, 2014; Daidzic; 2016a) and the flight level (FL), the
required air range may exceed 12,500 NM for antipodal ultra-long flights. No
civilian or military airplane today (without inflight refueling capability) is capable
of such ranges. About 40-60% increase in air range performance will be required
from the future airplanes to achieve truly global range (GR). There is no need to
elaborate on the economic aspects of finding the shortest trajectories between two
points on Earth. However, many other factors may cause perturbations of such
trajectories when considering the minimum-cost, minimum-fuel, or any other
goal-function in complex optimizations.
The Earth is not a perfect sphere and due to rotational and gravitational effects
the shape is more of an oblate spheroid. Actually, Earth’s shape is even more
complicated and more appropriately treated in terms of tesseral surface harmonics
(Tikhonov and Samarskii, 1990). Earth’s Polar radius is about 21 km shorter than
the Equatorial. Several Earth’s shape approximations are used:
Idealized spherical Earth of equivalent volume (implicitly used in
International Standard Atmosphere or ISA definition).
Reference mathematical ellipsoid of revolution (WGS-84, IERS/ITRS).
Smooth and oblate.
Geoid or particular equipotential surface that approximates mean sea-level
(MSL). Irregular and locally smooth. Physically the most important measure
of Earth’s shape. An example of Geoid in use is WGS-84 (revision 2004)
EGM96 Geoid.
Actual or physical Earth surface with all terrain details. This is fractal
dimension, scale dependent and mathematically intractable.
Using spherical Earth approximation is sufficient for the majority of long-
range air navigation problems. Due to economy of flight, we are particularly
interested in the shortest distances between two arbitrary points on Earth.
Differential geometry classifies such lines on smooth surfaces as geodesic lines.
On the spherical Earth model a geodesic is a Great Circle (GC) or Orthodrome
segment. GCs distances are not necessarily always shortest with respect to time as
atmospheric wind plays significant role in distance-time optimization problems.
The optimization of flight trajectories taking into account atmospheric factors,
extended operations (ETOPS) procedures (De Florio, 2016; FAA, 2008), airspace
1
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

restriction, etc., is a difficult task. Finding geodesics on smooth ellipsoidal Earth
has been solved. However, finding geodesic between two arbitrary points on the
actual Earth surface considering all the vertical terrain features is practically
impossible.
Although, it has been with us for many years, the theory of GC and
rhumb-line navigation has not been presented clearly and comprehensively for air
navigation practitioners, operators, and students. One of the stated purposes of
this article is to review and summarize differential geometry and calculus of
variation theories as applied to spheres. That will relive readers from searching
and consulting multiple sources using different and often confusing terminology.
We are only considering spherical Earth approximation and present theory
of GC (Orthodrome geodesic) and rhumb-line (Loxodrome) navigation. For short
distances over certain terrestrial regions we also provide some simplified
approximate formulas and define their limits of use. Several ultra-long-range
navigational problems utilizing existing major international airports are fully
solved using Orthodromes and Loxodromes. Graphic representation utilizing
Mercator (cylindrical) and azimuthal (planar) projections is presented. The
longest commercial non-stop flights today are reaching 8,000 NM (Daidzic,
2014). Increase in air range of, at least, 40% is required to achieve full GR
connecting any two airports on the Earth (Daidzic, 2014). Practically, due to
airspace restrictions, ETOPS procedures, and other considerations, the range of
existing long-range subsonic airplanes may need to increase by at least 50%.
The main purpose of this article is to give complete and comprehensive
consideration of short and long (geodesic) lines on spherical Earth for the purpose
of air navigation. While clearly professional navigation planning software is
available to major airlines/operators and ATC system it is mostly used as a black-
box. The objective is also to remove mysteries behind the long-range navigational
calculations and provide working equations. Spherical approximation is
satisfactory for overwhelming number of long-range air navigation problems. In
particular, Orthodromes and Loxodromes are typically considered the two most
important curves for air navigation. For that purpose we coded working equations
into several software platforms (Basic, Fortran, IDL, and Matlab). The main goal
of this article was to provide the fundamental theory and understanding, while the
computations can be executed in any high-level programming language.
Detailed mathematical derivations are presented in several appendices as
to relive a reader interested only in the final results from the heavy mathematical
interpretations involving differential geometry, variational calculus, topology and
2
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

other mathematical fields. Indeed, a knowledge of differential geometry, plane
and space vectors and vector calculus, and calculus of variation (variational
calculus) is required for in-depth understanding of the subject matters. The most
important geometric and topological properties of spheres have been reviewed
and working equations provided.
An added benefit of presented long-range navigation solutions is relatively
easy implementation of the actual Point-of-Equal-Time (PET), Point-of-No-
Return (PNR) and ETOPS limitations for given wind conditions (Daidzic, 2016a)
and one-engine-inoperative (OEI) cruising speeds (Daidzic, 2016b). In a future
contribution, and for the academic completeness an ellipsoidal Earth model will
be introduced with the Great Ellipse (GE) substituting Great Circle (GC). True
geodesic computations are complicated even for a smooth ellipsoid of revolution
requiring iterative solvers. Generally, GC calculations on spherical Earth are
sufficient for reliable air navigation flight planning purposes, considering all other
uncertainties involved and mandatory fuel reserves.
Air navigation should be a mandatory course in every professional pilot
curriculum and especially so in aviation university education. Unfortunately, it
often is not, which results in operational safety degradations. Too much and/or
uneducated reliance on sophisticated electronic navigation technology did and
certainly will continue to cause aviation accidents and incidents.
Literature review
A historic account of differential geometry and basic parts used in this
work have been consulted from the well-known mathematical classics, such as,
Aleksandrov et al. (1999), Goetz (1970), Kreyszig (1964), Lipshutz (1968), Struik
(1988), and Wrede (1972). Also more modern books on differential geometry,
such as, Oprea (2007) have been consulted. Basic planar and spherical
trigonometry theory with calculus applications has been consulted from the
books/handbooks by Ayres and Mendelson (2009), Bronstein and Semendjajew
(1989), Danby (1962), Dwight (1961), Nielsen and Vanlonkhuyzen (1954), Olza
et al. (1974), Spiegel and Liu (1999), and Todhunter (1886). The basic
introduction and theory of solid analytic geometry including various lines, planes
and curved surfaces was consulted using Hall (1968). A decent short history of
mathematical development including the planar and spherical trigonometry is
given in Struik (1987). Some special functions, elliptic integrals, and advanced
mathematical methods used in navigation, orbital, and celestial calculations is
given in classic sources by Abramowitz and Stegun (1984), Byrd and Friedman
(1954), Jahnke and Emde (1945), Tikhonov and Samarskii (1990), and Weber and
3
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

Arfken (2004). The general theory of calculus of variations and its applications in
analytical mechanics and geodesics on the sphere are given in, for example, Dym
and Shames (2013), Fox (1987), Greenwood (1987), Lanzos (1986), Lass (2009),
Smith (1998), Widder (1989), etc. An introduction into geodesy and geodetic
computations was consulted from the well-known classics such as Bomford
(1983), Torge (2001), and Vaníček and Krakiwsky (1986).
Basic principles of marine and air navigation and navigational
instrumentation are given in books by Bowditch’s bicentennial edition (2002),
Bradley (1942), De Remer and McLean (1998), Jeppesen (2007), Tooley and
Wyatt (2007), Underdown and Palmer (2001), and Wolper (2001). However, none
of these sources except maybe to an extent Wolper go into any deeper air
navigation mathematical theory and calculation procedures. Sinnott (1984)
proposed the use of the, so called, haversine formula for the GC navigation
problems on spherical Earth due to problems with numerical accuracy using the
classic cosine-formula for small central angles. Williams (2011) provides many
useful aviation formulas, but the equations are written as pseudo-language
mathematical expressions, difficult to read, and no background information is
provided. Phillips (2004) provides algorithms for GC and rhumb-line navigation,
but without derivations. Tewari (2007) presents GC and long-range airplane flight
computations and demonstrates how in the absence of wind with no yawing and
rolling motion, the airplane will actually follow a GC route. Recently, Weintrit
and Kopacz (2011) presented a novel approach to Loxodrome, Orthodrome, and
general geodesic problems in Electronic Chart Display and Information
System (ECDIS) used for nautical navigation.
Basic GC navigation theory also finds many applications is celestial
navigation, orbital mechanics, and astronomy and we used sources such as, Bate
et al. (1971) and Fitzpatrick (2012) for some useful information. Geodetic theory
and computations with geometric geodesy and geodetic datums on reference
terrestrial ellipsoid with some historical accounts has been provided in reports by
Jekeli (2012), Krakiwsky and Thomson (1974), Rapp (1991), and Rapp (1993).
Many geodetic computations also find applications in geophysics and we mention
some better known sources such as Lowrie (2007) that deal with various aspects
of geodetic geometry, definitions, and computations.
A good review of rhumb-line calculations on a sphere is given by
Alexander (2004) and for terrestrial ellipsoid by Williams (1950). Kos et al
(1999) derived and solved differential equation of Loxodrome on spherical Earth
using difference of co-latitudes to find its length. GE theory with geodesic and
rhumb-line calculations on spheroidal (ellipsoidal) Earth were given by Bennett
4
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

(1996), Bowring (1984), Sjöberg (2012), Tseng and Lee (2010), and Williams
(1996). A true numerical geodesic computations for direct and inverse geodesic
problems on ellipsoid of revolution (terrestrial spheroid) is given in a contribution
by Vincenty (1975). Consideration of elliptic integrals used in geodesic problems
was recently addressed by Rollins (2010). More recently Karney (2013) presented
a comprehensive account of algorithms for geodesics.
Motion of aircraft in an inertial frame of reference and non-inertial
topocentric frames was consider by Miele (2016). McIntyre (2000) provides in
depth considerations of motion on a rotating sphere. Fitzpatrick (2012) gives good
account of inertial and non-inertial frames of references on Earth. Discussion of
airplane trajectories and consideration of apparent forces in various non-inertial
frames of references during GC flights will be addressed in a future contribution.
Great Circle and Rhumb-line Navigation on Spherical Earth
Most often the inverse geodetic problem will be solved where the geodetic
(geographic) spherical coordinates of departure and arrival (destination) airports
are given. Sufficiently complete theory on fundamental geometric and topological
properties of spherical Earth is given in Appendix A. Derivation of geodesic lines
on spherical Earth, i.e., Orthodromes (GC arcs) is presented in Appendix B. The
GC arcs lie in an osculating plane that contains Earth’s center. A proof that GC
arcs are indeed shortest distances on spherical Earth is presented. Long distance
GC navigation on spherical Earth is discussed in Appendix C. The working
equations for calculating no-wind true courses (TC) and the vertex properties are
derived. GC and rhumb-line routes are plotted in cylindrical conformal Mercator
and/or polar Orthographic projections. Short-distance GC formulas were derived
in Appendix D. Additionally, stereographic, gnomonic and orthographic polar
(azimuthal) projections have been introduced. Theory of rhumb-line navigation on
spherical Earth is presented in Appendix E.
The traditional geographic latitude/longitude coordinates are first
converted into truncated angular degree form by using (N+, S-, E+, W-):
DDDDDDD.DDD,
SSSS.SSMMDDD
600360SS.SSSSMMDDD (1)
Geographic coordinates with an accuracy of one angular second (2.78x10-4
degree), provides an accuracy of about 100 ft (30 m). A hundredth of an angular
second delivers navigational uncertainty of about 1 ft (0.3 m). Eight significant
digits representation is thus sufficiently accurate for air-navigation applications.
5
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

Typically, aircraft fly at constant pressure altitudes, which at high altitudes
is referenced to a standard pressure datum (29.92 inch Hg or 1013.25 hPa). If
Earth’s oblateness is neglected and spatial changes of atmospheric pressure it can
be said that airplanes fly in concentric circles around Earth’s center. In that case
any GC will have arc-length of about 21,600 NM (or about 40,000 km or 25,000
SM). Future ultra-long range airplane should be able to fly non-stop half of any
GC to a point which is exactly opposite on the Earth surface (antipodal or
conjugate point) to achieve global range (Daidzic, 2014). Between two antipodal
points there are infinitely many GCs all of which have equal length assuming
spherical earth. The actual terrain elevation is irrelevant in high-altitude cruise
flight. Orthometric or Mean Seal Level (MSL) altitude is given in reference to
local Geoid height. Terrain elevation can be given in respect to vertical datum
contained in WGS 84 spheroid (GPS reference ellipsoid) and when corrected for
local Geoid height yields orthometric height. More accurate trajectory
calculations should also account for orthometric altitude changes due to variable
air pressure, but such considerations may not be significant for majority of flights.
Distance errors due to the actual shape of the Earth are less than 0.5% and often
within 0.3% and thus practically insignificant for most cases.
Utilizing the spherical Law of Cosines (Appendix C) and the average
Earth radius ER (=6,371,000 m) plus the average cruising altitude h , the actual
GC arc distance between two surface points 111 ,P and 222 ,P becomes:
2121
1
21 1 sinsincoscoscoscosRhRO EE
(2)
An alternative GC-arc distance formula using the trigonometric haversine
function (Appendix C) yields:
haverscoscoshavers
haverscoscoshaverstanRhR
sincoscossinsinRhRO
EE
EE
21
211
2
21
21
21
112
2212
(3)
Adding the average cruising altitude, or the maximum planned cruising
altitude, does not affect GC distance very much (10-20 NM), but is a conservative
estimate reducing uncertainties. All courses, vertex properties, and GC and
rhumb-line waypoints were calculated using expressions derived in appendices.
The geographical coordinates are given as latitudes ϕ (N+, S-) and longitudes λ
(W-, E+) for desired airport pairs on spherical Earth. The geodetic coordinates of
6
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

some major international airports used in program testing and route calculations
are given in Table 1.
Table 1
Airports used in long- and ultra-long range route computations and testing
ICAO IATA City Latitude (N+/S-)
DD MM SS.SSSS
Longitude (E+/W-)
DDD MM SS.SSSS
ZBAA PEK Beijing,
China
N 40 04 00.0000 E 116 36 00.0000
+40.08000000 +116.58444444
ZSPD PVD Shanghai,
China
N 31 09 00.0000 E 121 48 00.0000
+31.1500000 +121.8000000
SAEZ EZE Buenos Aires,
Argentina
S 34 49 20.0000 W 058 32 09.0000
-34.822222222 -58.53583333
RJAA NRT Tokyo-Narita,
Japan
N 35 45 55.0000 E 140 23 08.0000
+35.765278 +140.385556
SBGL GIG Rio de Janerio,
Brazil
S 22 48 32.0000 W 043 14 37.0000
-22.808902 -43.243646
KSEA SEA Seattle, WA,
United States
N 47 27 00.0000 W 122 18 42.0000
+47.449889 -122.311777
EGGL LHR London, England,
UK
N 51 28 39.0000 W 000 27 41.0000
+51.477500 -0.461388
YSSY SYD Sydney, Australia S 33 56 46.0000 E 151 10 38.0000
-33.946110 +151.177222
FAOR JNB Johannesburg,
South Africa
S 26 08 01.0000 E 028 14 32.0000
-26.133693 28.242317
MMMX MEX México City,
México
N 19 26 11.0000 W 099 04 20.0000
+19.436303 -99.072096
WMKK KUL Kuala Lumpur,
Malaysia
N 02 44 44.0000 E 101 42 36.0000
+2.745578 +101.709917
UUEE SVO Moscow, Russian
Federation
N 55 58 21.0000 E 037 24 47.0000
+55.972500 +37.413056
VCBI CMB Colombo, Sri
Lanka
N 07 10 51.0000 E 079 53 03.0000
+7.180756 +79.884117
SEQM UIO Quito, Pichincha,
Ecuador
S 00 06 48.0000 W 078 21 31.0000
-0.113332 -78.358610
LQSA SJJ Sarajevo, Bosnia
and Herzegovina
N 43 49 29.0000 E 018 19 53.0000
+43.82472222 +18.33138889
KMSP MSP Minneapolis-STP,
MN, United States
N 44 52 55.0000 W 093 13 18.0000
+44.88194444 -93.22166667
7
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

Rhumb-line or Loxodrome-arc distance of constant course angle α on
spherical Earth is calculated as (Appendix E):
secRhR
cosRhRL EEEE
12
1221 11 (4)
Special care has to be taken to convert spherical angles into Earth-based
headings 0-360 degrees. Attention also was warranted when crossing the prime
and its anti-meridian or practically the International Date Line (IDL). The cyclic
non-unique nature of trigonometric functions creates many problems when
performing calculations as illustrated in Figures 1 and 2. The main navigation
program originally developed in the True Basic v.5.5 contains subroutines that
inspect each airport location and then calculate route waypoints and courses.
Figure 1. Change of latitude on spherical Earth model. Not to scale.
Navigational calculations were performed on a multi-core 64-bit floating-
point CPU to minimize rounding errors. True Basic v.5.5 and v.6 (64-bit), 32-bit
optimizing-compiler Lahey Fortran 90/95 (Incline Village, NV), 64-bit optimizing
Absoft Fortran 90/95 (Troy, MI) with many 2003/2008 extensions, and Matlab
R2015a (ver. 8.5, Mathworks, Natick, MA) codes were developed with the
graphical capabilities showing GC and Rhumb-line routes on Cylindrical
Mercator and Polar Orthographic projections. Summary of some tested long-range
route computations using loxodromic and orthodromic navigation is given in
Table 2. Most GC (no rhumb-line) graphical results were generated using the
Great Circle Mapper©, copyright Karl L. Swartz (www.gcmap.com). Our
8
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

graphical capabilities are currently modest, but powerful visual representations
using IDL (Interactive Data Language) mapping capabilities will be available
soon. Several ultra-long routes between some major International airports were
used to test and demonstrate the capability and the accuracy of our NAV solvers.
Moreover, the intention was to highlight the difficulties and the curiosities when
navigating on Earth. Our AARNAVTM navigation programs used spherical-Earth
approximation, while the GC Mapper© calculator uses geodesic calculations on
oblate Earth. We also used the marine navigation www.Onboardintelligence.com
calculator to independently test and verify GC and rhumb-line results.
Figure 2. Change of longitude on spherical Earth model. Not to scale.
Results and discussion
Let us first consider a short flight from ZBAA to ZSPD. Interestingly,
Beijing (ZBAA) and Shanghai (ZSPD) are only 594.38 NM orthodromic-distance
apart (at FL360) with the Shanghai being S-SE of Beijing (numerical results are
summarized in Table 2). The ZBAA orthodrome departure course of 153.084o and
the ZSPD arrival course is 156.127o (see Table 2). The loxodrome constant course
and distance are 154.689o and 594.45 NM respectively (only about 0.07 NM or
about 426 ft longer). The vertex (Lat/Long) of the ZBAA to ZSPD GC-route is
located outside of the arc segment at N69.73/E044.69.
The first long-range route we discuss is the route between the SAEZ and
ZBAA (Daidzic, 2014). The Orthodrome distance flying at 36,000 ft delivers
distance of 10,433.26 NM. The initial outbound heading (from SAEZ) is 34.92o
9
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

and the final inbound heading (at ZBAA) is 142.11o with the northerly vertex of
N61.97o at E053.20o longitude. The total change in heading is about 107o. The
illustration of the GC route is shown in Figure 3. GC Mapper© oblate-Earth
(WGS-84) calculator returned the geodesic distance within 2.3 NM of our
orthodrome computations. The geodesic route overflies eastern parts of Brazil,
crosses Atlantic ocean northbound and tracks parallel to the coast of western
Africa, skimming N-W Europe and N-W portions of Russia and then after
reaching vertex it “descends” over Mongolia to Beijing on SE headings.
Table 2
Long-distance Loxodromic (L1-2) and Orthodromic (O1-2) routes at FL 360
Route L1-2 [NM] L O1-2 [NM] 1 2 Vertex
Lat.
ZBAA-ZSPD 594.45 154.69 594.38 153.08 156.13 N69.73
SAEZ-ZBAA 10,730.47 65.18 10,433.26 34.92 142.11 N61.97
SAEZ-ZSPD 10,930.39 291.28 10,604.11 184.38 355.80 S86.41
SBGL-RJAA 10,656.37 289.31 10,023.92 347.13 194.66 N78.15
SEQM-WMKK 10,819.16 270.91 10,667.53 358.51 181.49 N88.51
KSEA-FAOR 9,329.08 118.32 8,934.82 57.79 140.41 N55.10
EGGL-YSSY 9,578.70 122.44 9,206.03 60.46 139.22 N57.19
MMMX-WMKK 9,414.94 263.88 9,012.50 315.12 221.77 N48.29
MMMX-VCBI 10,477.80 94.03 9,223.85 2.31 177.80 N87.82
LQSA-KMSP 4,797.61 270.76 4,359.97 316.29 224.72 N60.10
The rhumb-line distance SAEZ-ZBAA is 10,730.47 NM (Loxodrome is
about 297.22 NM or 2.85% longer than Orthodrome) on a constant heading of
about 65.180 and includes about 3,500 NM flight over the dangerous southern
Atlantic Ocean. Rudimentary graphs were superimposed on a publically-available
conformal Mercator projection image of the world as shown in Figure 4
(Latitudes are unevenly spaced as ±15, ±30, ±45, ±60, and ±75 degrees). The GC
(red solid line) and rhumb-line (blue solid line) routes are clearly discernable. The
apparently shorter rhumb-line is quite deceptive due to stretching of the scale at
higher latitudes on conformal Mercator projection. The difference between the
GC route and the true Geodesic using GC Mapper is very small.
10
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

Figure 3. Great circle (geodesic) route SAEZ to ZBAA (EZE to PEK) on
conformal cylindrical Mercator chart. Courtesy of GC Mapper. Maps generated
by the Great Circle Mapper (www.gcmap.com) - copyright © Karl L. Swartz.
Figure 4. GC route SAEZ to ZBAA on conformal cylindrical Mercator chart.
11
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

The long-range route from SAEZ to ZSPD is illustrated in Figure 5 using
GC Mapper© and Mercator cylindrical projections. The same flight is partially
also shown in Figure 6 using Polar Orthographic projection. In the case of SAEZ-
ZSPD, the shortest (orthodrome) distance at FL360 is over Antarctica (SP) at
10,604.11 NM and a mere 200 NM short of antipodal distance.
Figure 5. Geodesic route SAEZ to ZSPD on conformal cylindrical Mercator
chart. Courtesy of GC Mapper. Maps generated by the Great Circle Mapper
(www.gcmap.com) - copyright © Karl L. Swartz.
The initial outbound heading from SAEZ is now almost straight south or
about 184o, while the final inbound heading to destination ZSPD is about 356o.
The vertex is very close to SP at -86.41o. The rhumb-line distance is 10,930.39
NM at the constant heading of 291.28o (see Table 2) and involves diagonal flight
over the entire Pacific Ocean. The GC Mapper returned the value of 10,580 NM
(over surface) with the departure heading of 183.9o. None of the two SAEZ-ZSPD
routes (GC or rhumb-line) are particularly friendly in terms of ETOPS procedures
as they involve long flights over Polar Regions and oceans. What is very
interesting is that while destinations ZBAA and ZSPD are very close to each
other, the routes from SAEZ could not be more different. One reaches high
northern latitudes, while the other goes almost straight over the South Pole (SP)
and straight across Antarctica.
If such a direct non-stop flight is ever planned it would be perhaps better
in terms of safety and following the ETOPS procedures to follow similar route as
in SAEZ-ZBAA route, i.e., fly over the South- and the North-America, passing
12
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

close to the North Pole (NP) and approach ZSPD on an almost straight south
course. Such longer route would probably add another 1 ½ hour of flight, but
there would be more options for deviations and alternates. Thus to have truly
global range an airplane will have to have practical ground range exceeding half
of the Earth circumference (e.g., 12,000 NM over ground) in which case the
required air range would likely exceed 13,000 NM.
Figure 6. SAEZ to ZSPD geodesic route on Polar Orthographic chart. Courtesy of
GC Mapper. Maps generated by the Great Circle Mapper (www.gcmap.com) -
copyright © Karl L. Swartz.
The next possible future ultra-long range flight specifically considered is
from Rio de Janerio (Brazil) SBGL (GIG) to Tokyo Narita in Japan RJAA (NRT).
The route is shown in Figure 7 on Mercator chart and in Figure 8 on Polar
orthographic chart using GC Mapper©. According to Table 2’s summary of
several ultra-long routes, we have the rhumb-line distance of 10,656 NM on a
straight W-NW course of 289.31o while the GC distance with average cruise
altitude of 36,000 ft delivers 10,023.92 NM. The differences between the GC and
rhumb-line is quite significant at about 632.45 NM. Our calculator returned
347.13o for outbound and 194.66o for inbound course. Our calculations estimated
vertex at +78.15o latitude (North). We also utilized Onboardintelligence.com
13
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

(Onboard Marine navigation software) calculator and obtained 10,001.52 NM for
Orthodrome (over surface) with the departure heading of 347.4o and the inbound
course into Narita of 194.4o. Its vertex calculations resulted in +78°24'.15 latitude
and -138°09'.22 longitude. Similar results were also obtained using the GC
Mapper©, which returned 10,004 NM and 347.5o geodesic over the reference
ellipsoidal surface (WGS-84).
Figure 7. GC (geodesic) route SBGL to RJAA (GIG to NRT) on conformal
cylindrical Mercator chart. Courtesy of GC Mapper. Maps generated by the Great
Circle Mapper (www.gcmap.com) - copyright © Karl L. Swartz.
The last route we specifically discuss is also the longest flight of all
identified here between the existing major airports. In Figures 9 and 10 the route
between Quito (Ecuador) and Kuala Lumpur (Malaysia) or SEQM to WMKK
(UIO to KUL) are shown respectively on the Polar Orthographic and the Mercator
charts. Both cities lie almost exactly on Equator and are very close to be
antipodal. Our navigation calculator returned the value of 10,667.53 NM for GC
distance flying average altitude of 36,000 ft with outbound initial heading of
358.510o and inbound destination heading into WMKK on 181.492o heading. The
vertex calculated is at Lat/Long +88.5099o/-169.850o and which is only about 90
NM from the NP. Detailed listing of the route is given in Appendix F.
The rhumb-line calculations returned the distance of 10,819.16 NM at a
constant heading of 270.91o. The GC Mapper returned the value of 10,644 NM
for the shortest (geodesic) distance over oblate Earth. However, that is surface
distance and if we add about 18 NM for additional air distance we arrive at 10,662
14
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

NM which is within 6 NM (0.052%) of our calculations. GC Mapper returned a
value of 358.8o for outbound course from departure point SEQM, which is within
18 angular minutes of our calculations. The Onboardintelligence.com calculator
returned the value of 10,644.04 NM for the Orthodrome and 10,812.68 at 270.9o
for the Loxodrome. The GC departure course calculated is 360o and destination
inbound course is 181.2o. Vertex is at N88°47'.3 and W168°21'.3. Due to actual
oblateness of the Earth, the shortest distance between two locations close to
Equator and on opposite meridians very likely will go over the NP or the SP.
Figure 8. Geodesic route SBGL to RJAA (GIG to NRT) on Polar Orthographic
chart. Courtesy of GC Mapper. Maps generated by the Great Circle Mapper
(www.gcmap.com) - copyright © Karl L. Swartz.
A familiar example of long-range route within continental US is flight
from KJFK (New York) to KLAX (Los Angeles). Our calculations have been
verified against Phillips’ (2004). A GC route at FL360 is 2,148.87 NM long with
the outbound course of 273.858o and the KLAX inbound of 245.892o. The vertex
is reached shortly after departing KJFK westbound. The rhumb-line distance is
2,169.77 NM at constant 259.324o TC and just about 21 NM longer than the
Orthodrome. Many examples of long-range flights (see Table 2) do not show very
large difference between the GC and rhumb-line distances – often less than 5%
(except MMMX-VCBI). In fact, the difference is largest when flying between two
points of similar mid-latitudes. For example, KMSP (Table 1) and Urumchi
(Ürümqi) Diwopu International Airport in China, Xinjiang/Uyghur province
(ICAO: ZWWW, IATA: URC) with latitude +43.908o and longitude of +87.475o,
are practically located on a meridian and its anti-meridian (longitude change of
15
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

179.3o). Both are located around the 44th parallel (like Sarajevo/LQSA). In fact
the central angle (about 91.21o) of the two airports lies in an osculating plane
slicing almost exactly over the NP. The orthodrome-arc length on the surface of
the spherical Earth is 10,142.1 km (5,476.3 NM), while the Loxodrome will
almost follow 44th parallel. The Loxodrome is about 14,244.6 km (7,691.5 NM)
which is about 40.5% longer than the GC-arc. Rhumb-line flying will imply
following straight East or West TC while the Orthodrome departure from KMSP
is almost on a straight North TC. Flying at FL360 will add about 10 NM. Flight
LQSA to KMSP shows 9.1% difference between the GC and the rhumb-line.
Figure 9. Geodesic route SEQM to WMKK (UIO to KUL) on Polar Orthographic
chart. Courtesy of GC Mapper. Maps generated by the Great Circle Mapper
(www.gcmap.com) - copyright © Karl L. Swartz.
It must be said that GC distance calculations are very robust as they
involve cosines which is an even function. On the other hand course calculations
are fragile and considerable effort was made to make spherical-angles
16
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

transformation into Earth’s coordinates accurate under all conditions. All test
routes evaluated at MSL showed excellent agreement with the available terrestrial
spheroid geodesic calculators. However, these publically-available calculators are
black-boxes with no insight to inner workings, plus they do not offer the ability to
include altitude corrections. Our GC and rhumb-line courses and angles
computations also showed excellent agreement with other calculators. Hence, we
gained confidence in our navigation programs which can calculate almost any
route on Earth with sufficiently high accuracy apart from the true antipodal
distances for which the problem becomes undetermined on the spherical Earth.
Figure 10. Geodesic route SEQM to WMKK (UIO to KUL) on conformal
cylindrical Mercator chart. Courtesy of GC Mapper. Maps generated by the Great
Circle Mapper (www.gcmap.com) - copyright © Karl L. Swartz.
A common misconception when considering GC-route flying is that
somehow since it is a curve on Mercator chart it should be approximated by
straight line (secant) segments. As a matter of fact as long as the weight vector
remains in the osculating plane no change of flight course is required for non-
rotating planet. In the absence of wind and GC trajectories, an aircraft only needs
to assume the correct initial heading and continue with no rolling and/or yawing
motion. GC arc is a geodesic with the projection on a tangential plane being a
straight line and thus shortest distance. The geodesic curvature is zero. The effect
of Coriolis force exists for rotating planet and will be discussed in a future
contribution. It is in fact the loxodromic route that requires yawing motion to
maintain constant heading on spherical Earth (see Figure C2). Loxodrome ends up
being an infinite logarithmic spiral of finite length that winds around the pole.
17
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

We are currently implementing IDL mapping capabilities using various
Earth projections. An older licensed RSI’s IDL v.5.6 (2002) is being currently
used. Generally, IDL (newest v.8.6 by Harris Geospatial) has very rich and
powerful mapping and plotting capabilities and can work as standalone program
or as a graphic interface to modern Fortran, Matlab, and Basic programs.
Calculations of segment PNR and PET for given aircraft model in arbitrary wind
conditions (Daidzic, 2016a) are easily implemented. Also all-engines-inoperative
gliding performance with arbitrary wind can be added for routes. Some of the
calculated routes from Table 2 can be easily verified manually using the basic
Orthodrome and Loxodrome distance formulas given in Equations (2-4). More
improvements and testing will be conducted in the future on our AARNAVTM air-
navigation calculators adding more graphic features and capabilities and
enhancing performance. GC and rhumb-line waypoints can be calculated or for
equidistant arc segments or for constant longitude increments (Appendix F).
Loxodrome, GE, and true geodesic calculations on reference WGS-84 ellipsoid
will be added to GC and loxodrome calculations on spherical Earth.
Short lines on spherical Earth
First we test polar short-distance calculators based on the planar
projections. As an example we took two points on Antarctica close to the SP -
point 1 has coordinates S80o 20’ 30.5000” and E100o 30’ 40.3456”, while point 2
has coordinates S85o 10’ 44.7575” and E150o 45’ 20.0000”. The exact GC
inverse-cosine and inverse haversine formulas both returned the value of
453.43222 NM (839.75647 km), while the Law-of-Cosine flat-Earth
approximation (Equation D2) returned the value of 453.1708446 NM. The
difference is less than 1,590 ft or about 484 m (0.058% error), which is excellent
accuracy for distance of about 840 km.
Several right-angle very short-distance calculations (Equation D4) and
comparison with the true GC formulas were also conducted. Mankato regional
airport (KMKT) has coordinates (N44o 13’ 22.0000” and W093o 55’ 09.5000”). A
close by Le Sueur (12Y) airport is almost straight true North (TN) with the
coordinates (N44o 26’ 27.1971” and W093o 54’ 57.0502”). Our GC calculators
using inverse-cosine and inverse haversine formulas (Equations 2 and 3) both
returned distance of 13.118826 NM, while the planar approximation (Equation
D4) returned the value of 13.09708846 NM, which is only about 132.16 ft (40.28
m) difference. In another example, for two points close to equator with the change
of latitude of 10 arc-minutes (about 10 NM) symmetric across the equator and the
difference of longitude of 10 arc-minutes, the exact formulas return equal distance
18
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

of 14.17603 NM (26.254 km), while the flat-Earth approximation returns the
value of 14.15167 NM, which is only 148.08 ft or less than 0.17% error.
On the other hand if we use KMKT as departure airport again and utilize
the flat-Earth approximation to calculate distance to a nearby Waseca airport
(KACQ), which is just about 9 arc-minutes to the south and 22 arc-minutes to the
East at about 44th parallel, we obtain “straight” distance of 23.753 NM. This is 5+
NM (actually 33,867 ft) longer than the exact inverse-cosine or haversine GC
formula delivering about 18.183 NM and thus unacceptably inaccurate. The short-
line distance formula given with Equation (D4) is acceptable only up to about 15
NM (28 km) in equatorial and lower mid-latitudes. Calculations were performed
utilizing 32 and 64-bit floating point arithmetic with MS Excel, True Basic v. 5.5
and v.6, Fortran 90/95/2003/2008, and Matlab R2015a (8.5) high-level computer-
language codes. We anticipate that a more user-friendly and thoroughly tested
program version will be offered in the future for free to all users in public domain.
Conclusions
Global range air navigation implies flying non-stop from any airport to
any other airport on Earth. That requires airplanes with the operational air range
of at least 12,500 NM. Air transportation economy requires shortest distance
flights which in the case of spherical Earth are Orthodrome arcs. Rhumb-line
navigation has no practical application in long-range flights but has been used as
comparison for historical reasons. Great Circle routes between many major
international airports have been calculated and waypoints presented for both GC
and rhumb-line routes. Many future global-range flights may be prohibited due to
polar crossings and/or long flights over open water with not many alternate
landing sites available. Additionally, we summarized short-lines navigation theory
with particular emphasis on Polar Regions and very short distances elsewhere on
the Earth. Working equations and algorithms have been coded into several high-
level programming languages. Considerable testing of programs have been
conducted and compared with the publically-available geodesic computations
over the surface of the terrestrial reference ellipsoid. Distance computations
usually were less than 0.3% in error, while the angles and courses were mostly
within few angular minutes. Accurate database of about 50 major international
airports from every corner of the world has been constructed and used in testing
and route validation. Further development will include computations of gliding
distances from any altitude under arbitrary winds depending on the type of aircraft
and the calculations of PET and PNR for every segment of the route and arbitrary
wind conditions. A user-friendly machine-independent program version for global
navigation with many flight planning features will be posted to public domain.
19
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

Author Bios
Dr. Nihad E. Daidzic is president of AAR Aerospace Consulting, L.L.C. He is also
a full professor of Aviation, adjunct professor of Mechanical Engineering, and
research graduate faculty at Minnesota State University. His Ph.D. is in fluid
mechanics and Sc.D. in mechanical engineering. He was formerly a staff scientist
at the National Center for Microgravity Research and the National Center for
Space Exploration and Research at NASA Glenn Research Center in Cleveland,
OH. He also held various faculty appointments at Vanderbilt University,
University of Kansas, and Kent State University. His current research interest is
in theoretical, experimental, and computational fluid dynamics, micro- and nano-
fluidics, aircraft stability, control, and performance, mechanics of flight, piloting
techniques, and aerospace propulsion. Dr. Daidzic is ATP and “Gold Seal”
CFII/MEI/CFIG with flight experience in airplanes, helicopters, and gliders.
20
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

References
Abramowitz, M., Stegun, I. A. (1984). Handbook of mathematical functions
(abridged edition). Frankfurt (am Main), Germany: Verlag Harri Deutsch.
Aleksandrov, A. D., Kolmogorov, A. N., & Lavrent’ev, M. A. (1999).
Mathematics: Its content, methods and meaning (3 volumes translation
from Russian). Mineola, NY: Dover.
Alexander, J. (2004). Loxodromes: A rhumb way to go, Mathematics Magazine,
77(5), 349-356. DOI: 10.2307/3219199
Ayres, F., Jr., & Mendelson,E. (2009). Calculus (5th ed.). New York, NY:
McGraw-Hill.
Bate, R.R., Mueller, D. D., & White J. E. (1971). Fundamentals of astrodynamics.
New York, NY: Dover.
Bennett, G. G. (1996). Practical rhumb line calculations on a spheroid. Journal of
Navigation, 49(2), 112-119. DOI: 10.1017/s0373463300013151
Bomford, G. (1983). Geodesy (reprinted 4th ed.). New York, NY: Oxford
University Press.
Bowditch, N. (2002). The American Practical Navigator (2002 bicentennial ed.).
Bethesda, MD: National Imagery and Mapping Agency (NIMA).
Bowring, B. R. (1984). The direct and inverse solutions for the great elliptic line
on the reference ellipsoid. Bulletin Géodésique 58(1), 101–108. DOI:
10.1007/BF02521760
Bradley, A. D. (1942). Mathematics of air and marine navigation with tables.
New York, NY: American Book Company.
Bronstein, I. N., & Semendjajew, K. A. (1989). Taschenbuch der Mathematik (24.
Auflage). Frankfurt/Main, Germany: Verlag Harri Deutsch.
Byrd, P. F., & Friedman, M. D. (1954). Handbook of elliptic integrals for
engineers and physicists. Berlin, Germany: Springer Verlag.
21
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

Daidzic, N. E. (2014). Achieving global range in future subsonic and supersonic
airplanes. International Journal of Aviation, Aeronautics, and Aerospace
(IJAAA), 1(4), 1-29. DOI: 10.15394/ijaaa.2014.1038
Daidzic, N. E. (2016a). General solution of the wind triangle problem and the
critical tailwind angle, The International Journal of Aviation Sciences
(IJAS), 1(1), 57-93.
Daidzic, N. E. (2016b). Estimation of performance airspeeds for high-bypass
turbofans equipped transport-category airplanes. Journal of Aviation
Technology and Engineering (JATE), 5(2), pp. 27-50. DOI: 10.7771/2159-
6670.1122
Danby, J. M. A. (1962). Fundamentals of celestial mechanics. New York, NY:
MacMillan.
De Florio, F. (2016). Airworthiness: An introduction to aircraft certification and
operations (3rd ed.). Oxford, UK: Butterworth-Heinemann.
De Remer, D., & McLean, D. W. (1998). Global navigation for pilots (2nd ed.).
Newcastle, WA: Aviation Supplies and Academics, Inc.
Dym, C. L., Shames, I. H. (2013). Solid mechanics: A variational approach
(Augmented edition). New York, NY: Springer. DOI: 10.1007/978-1-
4614-6034-3
Dwight, H. B. (1961). Tables of integrals and other mathematical data (4th ed.).
New York, NY: Macmillan.
Fitzpatrick, R. (2012). An introduction to celestial mechanics. Cambridge, UK:
Cambridge University Press.
Fox, C. (1987). An introduction to the calculus of variation. Mineola, NY: Dover.
Goetz, A. (1970). Introduction to differential geometry. Reading, MA: Addison-
Wesley.
Greenwood, D. T. (1987). Classical dynamics. New York, NY: Dover.
Hall, J. E. (1968). Analytic geometry. Belmont, CA: Brooks/Cole Publishing Co.
22
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

Jahnke, E., & Emde, F. (1945). Tables of functions: With formulae and curves.
New York, NY: Dover.
Jekeli, C. (2012). Geometric reference systems in geodesy. Columbus, OH: State
University.
Jeppesen. (2007). General navigation. (JAA ATPL Training, Edition 2, Atlantic
Flight Training, Ltd., Sanderson Training products), Neu-Isenburg,
Germany: Author.
Karney, C. F. F. (2013). Algorithms for geodesics. J. Geod., 87, pp. 43-55. DOI:
10.1007/s00190-012-0578-z
Kos, S., Vranić D., & Zec, D. (1999). Differential equation of a loxodrome on a
sphere. Journal of Navigation, 52(3), 418-420. DOI:
10.1017/s0373463399008395
Krakiwsky, E. J., & Thomson, D. B. (1974). Geodetic position computations.
Dept. of Geodesy and Geomatics Engineering, Lecture Notes (39),
Fredericton, N.B., Canada: University of New Brunswick.
Kreyszig, E. (1964). Differential geometry (revised ed.). Toronto, Canada;
University of Toronto Press.
Lanczos, C. (1986). The variational principles of mechanics (4th ed.). Mineola,
NY: Dover.
Lass, H. (2009). Elements of pure and applied mathematics. Mineola, NY: Dover.
Lipschutz, M. M. (1969). Differential geometry. New York, NY: McGraw-Hill.
Lowrie, W. (2007). Fundamentals of geophysics (2nd ed.). Cambridge, UK:
Cambridge University Press.
McIntyre, D. H. (2000). Using great circles to understand motion on rotating
sphere. Am. J. Phys., 68(12), 1097-1105, DOI: 10.1119/1.1286858
Miele, A. (2016). Flight mechanics: Theory of flight paths. Mineola, NY: Dover.
23
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

Nielsen, K. L., & Vanlonkhuyzen, J. H. (1954). Plane and spherical
trigonometry. New York, NY: Barnes & Noble.
Olza, A., Taillard, F., Vautravers, E., & Diethelm, J. C. (1974). Tables
numériques et formulaires. Lausanne, Switzerland: Spes S.A.
Oprea, J. (2007). Differential geometry and its applications (2nd ed.).
Washington, DC: The Mathematical Association of America.
Phillips, W. F. (2004). Mechanics of flight. New York, NY: John Wiley & Sons.
Rapp, R. H. (1991). Geometric geodesy: Part I. Columbus, OH: State University.
Rapp, R. H. (1993). Geometric geodesy: Part II. Columbus, OH: State University.
Rollins, C. M. (2010). An integral for geodesic length. Survey Review, 42(315),
20-26. DOI: 10.1179/003962609X451663
Smith, D. R. (1998). Variational methods in optimization. Mineola, NY: Dover.
Spiegel, M. R., & Liu, J. (1999). Mathematical handbook of formulas and tables
(2nd ed.). New York, NY: McGraw-Hill.
Sinnott, R. W. (1984). Virtues of the haversine. Sky and Telescope. 68(2), 159.
Sjöberg, L. E. (2012). Solutions to the direct and inverse navigation problems on
the great ellipse. Journal of Geodetic Science, 2(3), 200–205. DOI:
10.2478/v1015601100409
Struik, D. J. (1987). A concise history of mathematics (4th). Mineola, NY: Dover.
Struik, D. J. (1988). Lectures on classical differential geometry (2nd ed.).
Mineola, NY: Dover.
Tewari, A. (2007). Atmospheric and space flight dynamics: Modeling and
simulation with Matlab® and Simulink®. Boston, MN: Birkhäuser.
Tikhonov, A. N., & Samarskii, A. A. (1990). Equations of mathematical physics.
Mineola, NY: Dover.
Todhunter (1886). Spherical trigonometry (5th ed.). London, UK: MacMillan.
24
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

Tooley, M., & Wyatt, D. (2007). Aircraft communications and navigation
systems: Principles, maintenance and operation. London, UK: Taylor &
Francis.
Torge, W. (2001). Geodesy (3rd ed.). Berlin, Germany: Walter de Gruyter, GmbH.
Tseng, W.-K., & Lee, H.-S. (2010). Navigation on a great ellipse. Journal of
marine science and technology, 18(3), 369-375.
Underdown, R. B., & Palmer, T. (2001). Navigation: ground studies for pilots.
6th ed. Oxford, UK: Blackwell Science, Ltd.
US Department of Transportation, Federal Aviation Administration. (2008).
Extended operations (ETOPS and Polar operations) (Advisory Circular
AC 120-42B). Washington, DC: Author.
Vaníček, P., & Krakiwsky, E. (1986). Geodesy: The concepts (2nd ed.). New
York, NY: North-Holland.
Vincenty, T. (1975). Direct and inverse solutions of geodesics on the ellipsoid
with application of nested equations. Survey Review, 23(176), 88-93. DOI:
10.1179/sre.1975.23.176.88
Weber, H. J., & Arfken, G. B. (2004). Essential mathematical methods for
physicists. Amsterdam, the Netherlands: Elsevier.
Weintrit, A., & Kopacz, P. (2011). A novel approach to loxodrome (rhumb line),
orthodrome (great circle) and geodesic line in ECDIS and navigation in
general, Int. J. Marine Nav. and Safety Sea Transp., 5(4), 507-517. DOI:
10.1201/b11344-21.
Widder, D. V. (1989). Advanced calculus (2nd ed.). New York, NY: Dover.
Williams, E. (2011). Aviation formulary V1.46. Retrieved from
http://williams.best.vwh.net/avform.htm.
Williams, J. E. D. (1950). Loxodromic distances on the terrestrial spheroid.
Journal of Navigation, 3(2), pp. 133-140. DOI:
10.1017/s0373463300045549
25
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

Williams, R. (1996). The great ellipse on the surface of the spheroid. Journal of
Navigation, 49(2), 229–234. DOI: 10.1017/s0373463300013333
Wolper, J. S. (2001). Understanding mathematics for aircraft navigation. New
York, NY; McGraw-Hill.
Wrede, R. C. (1972). Introduction to vector and tensor analysis. New York, NY:
Dover.
26
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

Appendix A
Fundamental geometrical and topological properties of spheres
In this section fundamental properties of spheres will be given. Basic familiarity
with classical differential geometry and topology (Goetz, 1970; Kreyszig, 1964;
Lipschutz, 1969; Oprea, 2007; Struik 1988; Widder, 1989; Wrede, 1972) is
required. Euclidian geometry is assumed. A spherical coordinate system used in
geodesy and terrestrial (air, maritime, etc.) navigation is somewhat different from
the conventional used in mathematical physics (Tikhonov and Samarskii, 1990).
For the homogeneous smooth sphere of constant radius for which the center of
mass (barycenter) is in the geocenter, we have:
22
sinRzsincosRycoscosRx (A1)
We designated ϕ as latitude (geocentric and geodetic) measured from
equatorial plane, and λ is latitude. Spherical coordinates can be represented
inversely in terms of Cartesian coordinates:
RzRRyRRxR
xytanyxztanRzsinzyxR
12211222 (A2)
The first fundamental form of differential geometry specifies positive
definite invariant or arc length of the surface given parametrically as
,xv,uxx iii (Equation A1):
02 22
2
dvGdvduFduE
dvdudvdudxdxdddsI vuvuii xxxxxx (A3)
where,
vv
ii
vu
ii
uu
ii
v
x
v
xG
v
x
u
xF
u
x
u
xE xxxxxx
(A4)
For a sphere given in spherical coordinates u and v (Equation
A1), we obtain:
27
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

kjixx
kjixx
0
coscosRsincosR
cosRsinsinRcossinR
v
u (A5)
Where,
222 0 cosRGFRE xxxxxx (A6)
For a sphere we thus have:
22222 dcosdRddds xx (A7)
A vector product of parametric tangent lines is:
kji
kji
kji
xx
cossinRsincosRcoscosR
yxyxzxzxzyzy
zyx
zyx
22222
(A8)
An important property for a sphere (Struik, 1988) that is easily derived
from vector calculus and will be often used is:
22022
22
,cosRFGExx
xxxxxxxxxxxx
(A9)
If the curvilinear surface coordinates are further a function of a single
parameter, i.e., tv,tuxx ii , the arc length is (Goetz, 1970; Kreyszig, 1964;
Lipschutz, 1969; Oprea, 2007; Struik 1988; Widder, 1989):
b,atdtdt
dvG
dt
dv
dt
duF
dt
duEdtIs
b
a
b
a
2122
2 (A10)
Or we can write for a sphere:
28
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

2
1
2
1
212
212
dG
d
dEd
d
dGEs (A11)
For a curve coinciding with a meridian (line of longitude) and measuring
from SP to NP we have 0d , and:
RdRdEs
2
2
2
2
For an arbitrary line of latitude ( 00 d, ), we obtain:
00 2
cosRdcosRdGs
Small circles will have progressively shorter arcs of length until respective
poles where this becomes zero. The NP and the SP are the singular points on the
sphere (Struik, 1988).
The local angle between vectors xd and x parallel to a tangent plane at
an arbitrary point on sphere is (Lipschutz, 1969; Struik 1988):
s
v
ds
dvG
s
u
ds
dv
s
v
ds
duF
s
u
ds
duE
vGvuFuEdvGdvduFduE
vdvGudvvduFuduE
vudvdu
vudvdu
d
d
xdx
xdxcos
vuvu
vuvu
ii
ii
21222122 22
xxxx
xxxx
xx
xx
(A12)
For the tangent lines on the parametric curves (graticule – network of lines
of latitudes and longitudes) the above expression implies that the scalar product
must be zero as they are orthogonal as required by chart conformality. Indeed,
using Equation (A4), we obtain the condition of orthogonality of parametric lines:
00 dGddFdExx
29
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

The angle between the parametric lines ( arbitrary0const. dv,du,u )
and ( arbitrary0const. u,v,v ) and using Equation (A12), results in:
GE
FGEsin
GE
F
uEdvG
uFdvcos
2
22
Clearly, the coefficient F must be zero for the cosine angle to be zero and
sine to be one resulting in the right angle solution. The unit vector normal on the
parametric surface v,uxx at an arbitrary point using Equations (A8) and (A9)
is (Lipschutz, 1969; Struik 1988; Widder, 1989):
zyx
zyxFGEvu
vu
kji
xx
xx
xx
xxN
2
1 (A13)
By substituting partial derivatives for a sphere, the surface unit normal
becomes:
sin,sincos,coscos N (A14)
The surface normal thus points toward the center in every point of the
sphere. The second fundamental form of differential geometry specifies tangent
plane and the normal on the surface and is invariant to parameter transformation
just as the 1st fundamental form is (Lipschutz, 1969; Struik 1988; Widder, 1989):
02 22
dvgdvdufdue
dvdudvdudNdxddII vuvuii NNxxNx (A15)
In the case of sphere, we obtain:
kjixx
kjixx
kjixx
0
0
sinsinRcoscosR
cossinRsinsinR
sinRsincosRcoscosR
vv
uv
uu
(A16)
where, NxNxNxNxNx vvvvuvuuuu gfe
30
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

Finally, we obtain:
20 cosRgfRe NxNxNx (A17)
The normal curvature on the surface is given as (Goetz, 1970; Lipshutz,
1969; Struik, 1988):
22
22
2
2
dvGdvduFduE
dvgdvdufdue
dd
dd
I
IIn
xx
Nx (A18)
In the case of sphere, we obtain:
RdGdE
dgde
dGddFdE
dgddfden
1
2
222
22
22
22
(A19)
This proves that the normal curvature of sphere lies in an osculating plane
and is a constant. Since the fundamental forms are proportional, every point on a
sphere is umbilical or naval point (Struik, 1988). The curvature vector is:
Nkkkt gngndsd (A20)
It can be easily shown that geodesics are lines of shortest distance with an
important property that geodesic curvature is zero (Struik, 1988). For deeper
understanding of geodesics and its various applications (e.g., general theory of
relativity) consult Goetz (1970), Kreyszig (1964), Lipschutz (1969), Oprea, 2007,
Struik (1988), Wrede (1972), etc. The important mean and Gauss (total)
curvatures are defined as (Lipschutz, 1969; Struik, 1988):
22
2
21
2
21
1
1
2
2
2
RFEG
feg
RFEG
eGFfEg
G
(A21)
All the points on the sphere are thus elliptic umbilical points. Gauss
curvature is an invariant property of the surface. The surface of the sphere can be
found calculated from the 2nd Fundamental theorem:
31
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

2
2
2
2
22
4 RddcosR
ddcosRddFGEA
SS
(A22)
Since the spherical-average terrestrial radius is 6,371 km, the surface area
of the perfectly smooth planet Earth is about 510 million km2 or 197 million SM2
(148.7 million NM2). Land mass is about 30% or 150 million km2 or about 58
million SM2 (43.73 million NM2). Five spatially largest countries: Russia
(17,075,200 km2), Canada (9,984,670), USA (9,826,630), China (9,596,960), and
Brazil (8,511,965) cover almost 55 million km2 or more than 1/3 of the entire land
mass.
The volume of the sphere is obtained by integrating infinitesimal volume
in spherical coordinate system:
3
0
2
2
2
0
2
23
4RdcosddrrdrdcosrdrdVV
RR
V
(A23)
The volume of spherical Earth is accordingly 1.0832 x 1021 m3. The mass
and average density of Earth is easily calculated from the gravitational data.
32
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

Appendix B
Geodesics on a sphere – Variational calculus problem
Geodesic lines or geodesics are defined as lines (curves) of shortest length on any
surface (Greenwood, 1997; Lanczos, 1986; Lass, 2009; Smith, 1998; Struik,
1988). Struik (1988) also provides a more general definition of geodesics as
curves of zero geodesic curvature. For a sphere this simply means that geodesics
are “straight” lines with the entire curvature in the osculating plate and no
curvature in the rectifying plane. This also implies absence of any torsion for
Orthodrome curves on sphere (Struik, 1988). For example, straight lines are
geodesic curves on planar surfaces and that can be easily mathematically proven
(Smith, 1998). Quite generally, geodesic lines can be derived using the Euler-
Lagrange (E-L) equations of calculus of variations (Fox, 1987; Greenwood, 1997;
Lanczos, 1986; Lass, 2009; Smith, 1998; Weber and Arfken, 2004). On spheres,
the geodesic lines are GCs (Greenwood, 1997; Lanczos, 1986; Lass, 2009; Smith,
1998; Weber and Arfken, 2004). GC distances are also called Orthodromes
(Weintrit and Kopacz, 2011) GEs are approximately geodesic lines on ellipsoids
of revolutions (Bowring, 1984; Sjöberg, 2012; Tseng and Lee, 2010; Williams,
1986).
Although, GCs are shortest lines (geodesics) on a perfect sphere, the
tangent (heading) is constantly changing in spherical coordinate system, which
historically presented a problem for maritime and long-range air navigation. As a
matter of fact, Riemann’s geometry can be interpreted on a sphere by taking GCs
as straight lines (Struik, 1988). In Euclidian geometry the length of the parametric
curve between two points is:
2
1
222t
t
dtdt
dz
dt
dy
dt
dxRL (B1)
Using the first fundamental form of differential geometry for a sphere
(Goetz, 1970; Kreyszig, 1964; Lipschutz, 1969; Oprea, 2007; Struik, 1988) or by
direct differentiation from Equation (B1), the length of a curve along the spherical
surface is a parametric curve where the longitude is a function of latitude
(Equation A10):
01
2
1
2
2
dd
dcosRL (B2)
33
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

The integral given by Equation (B2) belongs to a class of (incomplete)
elliptic integrals of the second kind (Abramowitz and Stegun, 1984; Byrd and
Friedman, 1954; Dwight, 1961; Jahnke and Emde, 1945; Spiegel and Liu, 1999):
dcosk,kE
0
221
Elliptic integrals originated in problems of rectification of elliptical orbital
arcs. In general, they do not have analytical (closed-form) solution (Byrd and
Friedman, 1954). The goal is now to find a curve (out of infinitely many possible)
on a sphere with λ=λ(ϕ) so that length L(λ) is minimized between the starting P1
(ϕ1, λ1) and the end point P2 (ϕ2, λ2). Calculus of variations was developed to
precisely deal with these kind of problems. For more details on variational and
optimization methods/principles and its applications in physics and engineering a
reader could consult references used here, such as, Fox (1987), Greenwood
(1997), Lanczos (1986), Smith (1998), and Weber and Arfken (2004).
The variational problem of finding the shortest distance (geodesic) on a
spherical surface between two known points is formally known as an inverse or
2nd geodesic problem (Bomford, 1983; Vaníček and Krakiwsky, 1986). Thus,
Equation (A4), can be formally transformed into variational problem involving
functional L(λ) (Fox, 1987: Smith, 1998):
d
dwwcosRw,Fd,FL 221
1
0
(B3)
Here, a particular curve λ(ϕ) resulting in shortest length L defines a
geodesic on a spherical surface, i.e., GC or Orthodrome with two ends anchored
in known starting and ending points. To solve this problem we use the powerful
Euler-Lagrange equations (Fox, 1987; Greenwood, 1997; Lanczos, 1986; Lass,
2009; Smith, 1998; Weber and Arfken, 2004):
ydx
xdyxyxy,xy,xFF
y
F
y
F
dx
dx
0 (B4)
When E-L equations are satisfied presents sufficient and necessary
condition to make the following integral (functional) stationary (Lanczos, 1986):
34
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

byaydxy,y,xFxyJ
b
a
, (B5)
The problem of geodesics on a sphere reduces to the following E-L equations:
0
,F,F
d
d (B6)
Since there is no direct dependence on longitude (meridian), i.e.,
0 F , the variational problem reduces to simple:
.const
w
w,F
w
w,F
d
d,F
d
d
0 (B7)
Using definitions from Equation (A5), we obtain:
.const
cosw
coswR
w
w,F
22
2
1 (B8)
We can now extract unknown meridional dependence on latitude:
.consta
acoscos
a
d
dw
22
(B9)
Integrating Equation (A11) results in:
bacoscos
da
22
(B10)
The analytic solution of this integral can be obtained by using several
different substitution methods (Dym and Shames, 2013; Fox, 1987; Oprea, 2007;
Smith, 1998). First, the integral in Equation (B10) will be transformed into using
trigonometric relationship, 22 1 tansec :
btanaa
dsecab
seca
dseca
222
2
22
2
11 (B11)
35
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

Introducing substitution (Oprea, 2007):
dseccdseca
adwtanctan
a
aw
22
22 11
The integral in Equation (B11) becomes:
bw
dw
21
(B12)
Utilizing another substitution sinw (Oprea, 2007) and then back-
substitution to the original variable for latitude, the integral in Equation (B12)
becomes:
ba
tanasin
2
1
1
(B13)
The geodesic on the circle is restricted (constrained) with the curve given
parametrically (longitude as a function of latitude) as:
.constc,b,atanctana
absin
21 (B14)
The unknown constants “b“ and “c“ can be evaluated from the known
anchor points P1 and P2 satisfying:
2
2
1
12
1
21
1
1
tan
bsin
tan
bsinctancsintancsinb
These are two simultaneous transcendental (nonlinear) equations that can
be solved numerically for unknowns: b and c. Once the constants are known there
is a unique (unless conjugate points) shortest curve (Orthodrome arc) that passes
between two arbitrary points on the sphere. By expanding trigonometric functions
in Equation (B14), we obtain:
sincbsincoscosbcossincos
Using spherical coordinate system definitions from Equation (A1), we obtain:
36
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

00 zCyBxAczbcosybsinx (B15)
where, ca
aCbcosBbsinA
21.
This is the special case of the general equation of the plane (Hall, 1968,
Spiegel and Liu, 1999):
0 DzCyBxA (B16)
The plane described with Equation (B16) is passing through the center of
the sphere P0 (0,0,0) and the two points (anchors) on the sphere, P1 (X1,Y1,Z1) and
P2 (X2,Y2,Z2) implying D=0 (Bronstein and Semendjajew, 1989; Hall, 1968; Olza
et al., 1974; Spiegel and Liu, 1999). The same final result was also obtained by
Dym and Shames (2013), Fox (1987), Oprea (2007), and Smith (1998). This plane
which intersects with the sphere forms GC or Orthodrome. For antipodal
(conjugate) points there are infinitely many GCs.
The radii for the two points P1 and P2 laying on the plane (Equation B16)
in orthonormal Cartesian coordinate system have the direction cosines (Hall,
1968, Spiegel and Liu, 1999):
222222222
000
11 zyxRcoscoscosnml
R
z
R
zzcosn
R
y
R
yycosm
R
x
R
xxcosl
The central angle (see also Figure B1) between the two radii for points P1
and P2 belonging simultaneously to the intersecting plane and the surface of the
sphere is:
02
212121212121
R
zzyyxxnnmmllcos (B17)
We have thus demonstrated that an Orthodrome is a section of a GC arc,
which lies in the osculating plane intersecting the center of the sphere and is a
geodesic line on a perfect sphere. Such intersecting plane can always be rotated so
as to coincide with the equatorial GC (z=0) or a meridional GC for which x=0 or
y=0 and for which the arc-length stays invariant.
37
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

Appendix C
Great Circle navigation on a perfect sphere
Let us use a spherical coordinate system with a traditional notions of latitude ϕ
and longitude λ. For each angle of latitude there is also a corresponding angle of
complementary latitude or co-latitude δ (often called polar distance). For a perfect
homogeneous sphere the geocenter, geodetic (geographic) center, and barycenter
are all in the same point. A schematic of a vector point on a smooth spherical
surface in spherical coordinates is shown in Figure C1. The plane intersecting the
sphere through the center and an arbitrary GC are shown as well. Transformation
between the Cartesian coordinate system (x,y,z) with the orthonormal vector basis
(i,j,k) and the spherical coordinates on a unit sphere is:
22
sinzsincosycoscosx (C1)
Figure C1. Vector representation in spherical coordinate system and the GC lying
in an osculating plane intersecting the perfect sphere through its center.
The unit vectors in the Cartesian coordinate system are orthonormal,
independent, and form the basis in the Euclidian space:
01 kjkijikkjjii
A radius vector of an arbitrary point on sphere of radius magnitude R is:
38
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

R
sin
sincos
coscos
R ii
rr
(C2)
Two arbitrary points on a surface of a sphere with the latitude-longitude
coordinates of constant radius are 111 ,,RP and 222 ,,RP . Two radius-
vectors originating in a geometric center now define a plane and a central angle σ.
A dot (inner or scalar) product of two vectors with known norm is:
cosRcos 2
2121 rrrr (C3)
Using Equation (C2) we obtain:
21212121
2
212121
2
21
sinsinsinsincoscoscoscosR
zzyyxxcosR
rr (C4)
This is the same result obtained previously (Equation B16). Using
trigonometric addition formulas one obtains:
sinsincoscoscos (C5)
Substituting Equation (C5) into Equation (C4) results in:
212121 sinsincoscoscoscos (C6)
The central angle can be directly derived using the Law of Cosines of the
spherical trigonometry (Bowditch, 2002; Bronstein and Semendjajew, 1989;
Nielsen and Vanlonkhuyzen, 1954; Olza et al., 1974; Spiegel and Liu, 1999;
Todhunter, 1886):
2
212121 cossinsincoscoscos (C7)
Using familiar trigonometric conversions, the identical relationship as the
one given by Equation (C6) is obtained. Taking the inverse of the cosine function
(Equation C6 or C7), delivers:
212121
1 coscoscossinsincos (C8)
39
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

A third method to estimate the central angle is based on using the chord of
the GC instead the arc itself. This method is computationally the most ineffective,
and is introduced solely for academic completeness. The chord is a line segment
in three-dimensional Euclidian space. Using spherical coordinates on a unit
sphere given by Equation (C1), the chord vector components are:
12
1122
1122
sinsinZ
sincossincosY
coscoscoscosX
(C9)
The norm (magnitude) of the chord and the central angle is:
22 1222 C
sinZYXC CC (C10)
The radius vector for any point on the sphere is constant and the chord
between two points form’s an isosceles triangle which is split in two symmetric
right triangles (see Figure C1). The GC-arc length for the angle less than or equal
1800 or π between two points P1 and P2 on the same plane on a surface of a sphere
of constant radius R is thus:
coscoscossinsincosRRL 2121
1
21 (C11)
In practical calculations, we use northerly (N) latitudes as positive and
southerly (S) latitudes as negative. The westerly (W) longitudes are taken
negative, while easterly (E) are taken positive. It will be also necessary to convert
latitudes and longitudes into real numbers (angular degrees) and then possibly
also convert into radians if software implementations requires it.
However, as pointed out by Sinnott (1984), the Orthodrome distance
calculations for two points in proximity (e.g., closely spaced astronomical bodies
on celestial sphere) using Equation (C8) may produce large errors due to the finite
number of significant digits in discrete computations. Thus Sinnott (1984)
suggests using the haversine formula, which was well known and used in the old
navigational and astronomical tabular computations (Bowditch, 2002). The
somewhat antiquated haversine and versine trigonometric functions have also
been used recently in generalized wind-triangle computations and its effects on
aircraft in cruise by Daidzic (2016a). We define haversine of an angle as
(Daidzic, 2016; Dwight, 1961; Nielsen and Vanlonkhuyzen, 1954; Sinnott, 1984;
Todhunter, 1886):
40
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

122
1
2
2
verscossin
cosvershavers (C12)
Using the definition given in Equation (C9) it can be easily shown that
(Nielsen and Vanlonkhuyzen, 1954):
212121 haverscoscoshavershavers (C13)
Again using Equations (C9) and (C10), the haversine (inverse haversine)
formula for GC distance ( 2121 , ) expressed over inverse sine
becomes:
222
2
2
21
21
21
1
21
sincoscossinsinR
haverscoscoshaverssinRRL
(C14)
Haversine expression is much more accurate for very short distances
unless 64-bit floating-point arithmetic computations are used implementing
Equations (C7) and (C8). However, the haversine formula fails when calculating
Orthodromic distances for antipodal (conjugate) points on the sphere. The angle
ambiguity is avoided by using the inverse tangent function (ATAN2) found in
many software implementations (Basic, Fortran, Matlab, Excel) as the arctan
(arcus-tangent) function is checked in all four quadrants. Using common
trigonometric relationships we can convert inverse sine (arcus sinus) into inverse
tangent function and write for Orthodrome’s arc central angle:
haverscoscoshavers
haverscoscoshaverstan
21
211
1 (C15)
Equations (C11), (C14), and (C15) are working equations for Orthodrome
calculations between two non-conjugate points on the spherical Earth. For very
short distances, haversine Equation (C13) is recommended, while for almost
antipodal, inverse-cosine Equation (C11) should be used. Very short flights are
mostly following constant-heading rhumb-lines and the possible error caused by
implementing Equation (C11) is almost never encountered in air navigation. An
average error of about 0.5% exists when using Orthodrome versus geodesics and
GEs on terrestrial reference ellipsoid. The exact error varies and can be somewhat
smaller or larger depending on the exact route. For a 10,000 NM non-stop flight
41
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

one can expect an error typically of about 30-50 NM (corresponding to 4-6
minutes in high-altitude high-subsonic cruise flight), which is acceptable for most
applications considering all other uncertainties. To reduce distance errors to
0.05%, or less, GE on oblate ellipsoidal Earth approximation is recommended
(Bowring, 1984; Sjöberg, 2012; Tseng and Lee, 2010). Accurate geodesic
distances from few centimeters to 20,000 km on WGS-84 reference ellipsoids can
be calculated using the well-known iterative algorithm of Vincenty (1975) and
Karney (2013), but for air navigation purposes this is hardly needed.
To calculate all (or arbitrary many) waypoints on the GC, we use the
normal vector on the osculating plane in which GC lies. Using the definition of
the vector (or cross) product, we obtain the vector normal as (Ayres as
Mendelson, 2009; Bronstein and Semendjajew, 1989; Hall, 1968; Olza et al.,
1974; Wolper, 2001):
122121121221
222
11121
yxyxzxzxzyzy
NNN
zyx
zyx zyx
kji
kji
kji
rrN (C16)
where,
jikikjkjikkjjii 0
After complicating vector algebra using Equation (C2), we obtain for
normal vector components:
2121
2
121212
2
212121
2
sincoscosRN
cossincoscossincosRN
sinsincossinsincosRN
z
y
x
(C17)
Since vector normal is perpendicular to all points lying on the plane,
including the points that are common to GC, then for an arbitrary vector point on
an Orthodrome, we write the condition for perpendicularity of vectors:
0 zNyNxN zyxrN (C18)
By substituting the spherical coordinates from Equation (C2), we obtain:
42
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

z
yx
z
yx
N
sinNcosNtan
N
sinNcosNtan
1 (C19)
Thus any point on a GC segment must satisfy Equations (B15) and (C19).
After substituting Equation (C17) into Equation (C19), we obtain latitude on a GC
for an arbitrary longitude (taken between the starting and ending longitudes):
21
21
12211
sin
sintansintantan (C20)
The heading (TC) is constantly changing on GC route (unless on
meridians or equator). This is due to convergence of meridians ( sin )
toward the poles which can be observed in Figure C2. Small circle radii decrease
with the cosine of latitude to become zero at the poles (see Equation A10 and its
corollaries). Also shown in Figure C2 is Loxodrome, which is curving toward
nearest pole. As a matter of fact, the Loxodrome would be spiraling infinitely
around the pole, but has a finite length.
Figure C2. Gnomonic projection depicting Orthodrome and Loxodrome. Not to
scale.
43
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

Using the Law of Sines in spherical trigonometry (Bronstein and
Semendjajew, 1989; Danby, 1962; Nielsen and Vanlonkhuyzen, 1954; Olza et al.,
1974; Spiegel and Liu, 1999; Todhunter, 1886), we can write:
2
1
2
1
1
2
sin
sin
sin
sin
sin
sin
sin
sin
(C21)
The starting and ending (final) true courses (heading or bearing) are:
1
1
22
1
1
cos
sin
sinsincos
sin
sinsin (C22)
Unfortunately, this simple relationship does not resolve angle ambiguity of
inverse-sine and is quite dangerous to implement trivially. But the TC information
can be also obtained using the Cosine Law of spherical trigonometry (Danby,
1962; Nielsen and Vanlonkhuyzen, 1954; Todhunter, 1886), resulting in:
sincos
cossinsincoscos
sincos
cossinsin
sinsin
coscoscoscos
2
21
22
1
12
1
12
1
(C23)
For numerical accuracy and resolving the angle ambiguity using periodic
trigonometric functions it is always better to use inverse-tangent function which
in software implementation is typically coded as ATAN2(y,x) or similar (in True
Basic an intrinsic function ANGLE (x,y) is used). Quadrants are shown in Figure
C3. In terms of inverse tangent function by combining Equations (C22) and (C23)
and doing basic trigonometric transformations, one obtains (see Figures C2 and
C3):
22
212
1
2
121
1
1
cossintancos
sintan
cossintancos
sintan
(C24)
Utilizing the Law of Sines, we can also find the very important point along
GC route called the vertex (Jeppesen, 2007; Underdown and Palmer, 2001;
Wolper, 2001). Vertex is the point of highest latitude (N or S) for which the
44
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

instantaneous TC is equal to 90 o or 270o and is illustrated in Figure C3 together
with the GC segments. Using the Law of Sines as given in Equation (C21), we can
write from the second and third equality:
2211
2
1
1
2
cossincossin
sin
sin
sin
sin
(C25)
Figure C3. The location of vertex on GC-arc routes using the polar gnomonic
projection. Not to scale.
This expression is sometimes called Clairaut’s relation or theorem (Struik,
1988), but for spheres it actually comes originally from many Arabic and
Iranian/Persian scholars in the period from 9th to 13th century, such as, Al-Jayyani
and Nasir al-din al-Tusi (Struik, 1987) who, by-the-way, have fully developed
planar and spherical trigonometry. Equation (C25) is valid for any two points on a
GC. It will also be valid for the point where the GC crosses equator (going N or
S). Since the latitude at the equator is 0o, and the TC at vertex is 12 sin or
123 sin , we may write:
vertexeq coscossincossinsin 2211 (C26)
45
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

The latitude (N or S) of the vertex is thus:
cossincoscossincossincos eqvertex 1
11
11 (C27)
A GC which is not an equator or meridian (with anti-meridian) will have
two vertices (“higher” and “lower” or N and S). The longitude of the vertex is
shifted by 90o from the longitude at which GC crosses Equator. The longitude of
the vertex can be easily derived and yields:
vertex
vertextan
tancos
11
1 (C28)
We can easily prove the relationship between the vertex and Equator’s
(Eq) crossing longitudes by using:
vertexvertexEqEq tancostan (C29)
All vertex geometric properties can be derived using Napier’s rules of
right-angled spherical triangle (Bowditch, 2002; Nielsen and Vanlonkhuyzen,
1954; Olza et al., 1974; Todhunter, 1886). Since Equator is excluded as a GC
route and has undefined vertex it must be 0vertextan . On the other hand, we
have 0Eqtan . Hence the solution is:
,,,nncos vertexEqvertexEq 2102
120
(C30)
Finally, we have defined and derived all working equations necessary for
GC route computations on spherical Earth. In general, if the Orthodrome route is
along the equator or any meridian (which are GCs on spherical Earth) then the
problem is trivial and many of the here derived equations will fail. For example,
vertex is undefined for the GC along the Equator or any meridian. However, the
TCs are then simply equal to 0o/180o (along any meridian) or 90o /270o (along
Equator) and the Orthodrome is equal to change in longitude multiplied by the
spherical Earth radius (6,371 km) when along equator. Similar reasoning will
apply for any meridian and its anti-meridian.
46
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

Appendix D
Short distance Great Circle navigation on a perfect sphere
As mentioned previously the cosine-formula for GC (Equation C8) fails for very
short arcs. While mathematically exact, the problem occurs with the finite number
of digits representation as was illustrated by Sinnott (1984). Essentially for
angular distances of less than 1 arc-minute it is better to use haversine formula
(Equations C14 and C15) although modern 64-bit floating point arithmetic’s can
push the envelope to less than 1 arc-second. Such small angular distances have
important astronomical, but practically no air navigation applications.
For short distances on Earth (around 20 km or less), it is acceptable to
neglect Earth’s spheroidal shape and utilize planar-trigonometry. Here, we will
distinguish two special cases (1) Polar-coordinates flat-Earth formula used with
polar azimuthal projections for high latitudes, and (2) planar projections using
simple Pythagoras theorem (Euclidian space). Close to the geographic poles (NP
or SP), the polar projections (De Remer and McLean, 1998; Jeppesen, 2007;
Struik, 1988; Underdown and Palmer, 2001) will result in meridians being
represented as radials coming out of poles, while the lines of latitude are
concentric circles with separation distance between them changing depending on
the type of projection. The polar stereographic azimuthal projections is illustrated
in Figure D1. Polar gnomonic would be very similar, but the distance between the
lines of latitude will be increasing rapidly (Equator is in infinity). Orthographic
projection has center of projection in infinity (Figure D2). The lines of latitude are
decreasingly spaced concentric circles. Conjugate hemisphere is not represented.
Figure D1. Polar stereographic azimuthal projection of Earth. Not to scale.
47
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

Figure D2. Polar orthographic azimuthal (plane) projection of Earth. Not to scale.
Polar-coordinates azimuthal projection formula originates from the Law of
Cosines of planar trigonometry (Olza et al, 1974; Spiegel and Liu, 1999) as
illustrated in Figure D3:
2
2 2121
2
2
2
121
cos (D1)
Figure D3. Polar azimuthal gnomonic projection with polar coordinates and
rectangular azimuthal projection for short-distance computations.
Substituting co-latitudes (polar distances) with geocentric latitudes, we
obtain for the central angle and the chord distance approximating GC arc:
48
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

m0003716
222
22
2121
2121
2
2
2
121
,,RRL
cos
EE
(D2)
The closer the straight-line course in polar azimuthal projection is to the
poles the more accurate the approximation is. We can also derive TCs at points 1
(departure) and 2 (destination) using the same law-of-cosines:
12
21
2
1
2
2
2
1
2
211
122
22cos (D3)
A simple right-angle approximation (Pythagoras theorem) can be used for
lower latitudes and very short distances:
21
211
12121
2
21
2
2121
tanRL E
(D4)
Essentially the convergence of the meridians and the curvature of the
parallels is neglected. A comprehensive analysis of the deviation from the various
GC formulas was not conducted as this presents a significant effort in itself. A
somewhat improved oblique stereographic azimuthal projection short-distance
GC that partially takes into account convergence and latitude is:
2121
2
21
2122
21212
ERLcos (D5)
49
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

Appendix E
Rhumb line navigation and the Loxodrome
Maintaining constant angle (headings, courses, bearings) in relationship to
terrestrial meridians is called rhumb-line navigation. Rhumbs are part of curves
called Loxodromes. Rhumb line navigation does not deliver shortest distances on
spherical or spheroidal Earth. A Loxodrome is a very interesting curve that for
any heading other than North-South and East-West (coincides with Orthodromes)
ends up spiraling around the NP and SP (Alexander, 2004; Lipshutz, 1969; Struik,
1988). Loxodrome is a straight line on a Mercator cylindrical conformal
projection. For example, on a polar stereographic conformal projection a
Loxodrome becomes a logarithmic spiral (Lipshutz, 1969; Struik, 1988;
Alexander, 2004) about respective poles. Conformal Mercator cylindrical chart
provides for uniform stretching throughout the chart (N-S and E-W) resulting in
preservation of local angles (conformality) delivering isotropic Representative
Fraction (RF) or scale. The local and the total stretching from the Equator on
spherical Earth is expressed mathematically as:
42
1
0
tanlntanseclndsec
cossec
(E1)
The method of calculating total stretching in the medieval time was de-
facto numerical integration and was referred to by Edward Wright as “perpetual
addition of Secants” (Alexander, 2004). Naturally for Mercator cylindrical
projections with the line of contact coinciding with the Equator, the poles
(singular points on sphere) cannot be represented as the total stretching goes to
infinity. One could use oblique or transverse cylindrical projections instead to
depict poles (De Remer and McLean, 1998; Jeppesen, 2007; Underdown and
Palmer, 2001).
Using Equation (A11) with one vector being collinear with the lines of
longitude ( 0 .,const ), while the other represents Loxodrome on a
sphere, one obtains:
REs
ds
dR
sds
dEcos 2 (E2)
50
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160

Using the first fundamental form for sphere this can be written as:
dctg
cos
ddRdscos 2222 (E3)
Integrating Equation (E3), we obtain:
.constctgmctgdctgcos
d
12
2
1
2
1
And finally using Equation (E1):
1212
4242
ctgtanlntanln (E4)
This leads to a constant course or bearing between two points connected
by a Loxodrome on Mercator chart:
42
1
12
12
tanlnM
mMMtan (E5)
Here, M’s are called meridional parts (mer-parts) for respective latitudes
(Williams, 1950). Loxodromic distance can be easily calculated using the
knowledge of differential geometry (Lipshutz, 1969; Struik, 1988). Employing
Equation (A10), the arc-length of Loxodrome part becomes:
secRcos
Rdd
dcosRL
12
12
212
2
21
2
1
1 (E6)
Since,
sectan
cos
tan
d
d
, where
20
.
As the TC angle (measured from TN) approaches 90o (but not 90o itself)
the Loxodrome length sharply increases. Kos et al. (1999) obtained similar result
utilizing co-latitudes and using similar differential geometry arguments. However,
by not using absolute value of co-latitude differences their Loxodrome distance
can become negative. Alexander (2004) derived Loxodrome distance using:
51
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017

secRdd
d
d
dRL
12
2
221
2
1
11 (E7)
where from Equation (E1):
tan
d
dsec
d
d
A practical expression for constant TC (bearing) rhumb line navigation
between two points on spherical Earth is now:
42
42
1
2
12
1
tan
tanlntan (E8)
One has to be careful when the Loxodrome is crossing Greenwich anti-
meridian or approximately the International Date Line (IDL). Conformal
Mercator chart can be easily constructed by using X and Y coordinates as (Struik,
1988):
420
tanlnRYRX EE
(E9)
Loxodromes on an ellipsoidal Earth can be also easily calculated in which
case the stretching has to include the eccentricity (Alexander, 2004; Bennett, G.
G., 1996; Williams, 1950). The latitudes of the corresponding mer-parts are:
2
2 1 MexptanM (E10)
Although the Loxodrome is a curve spiraling infinitely around the SP and
the NP, the distance is always finite except for angle of 90o (cos π = 0):
0
80010NM
cos
,
cos
RL NPSP (E11)
52
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160
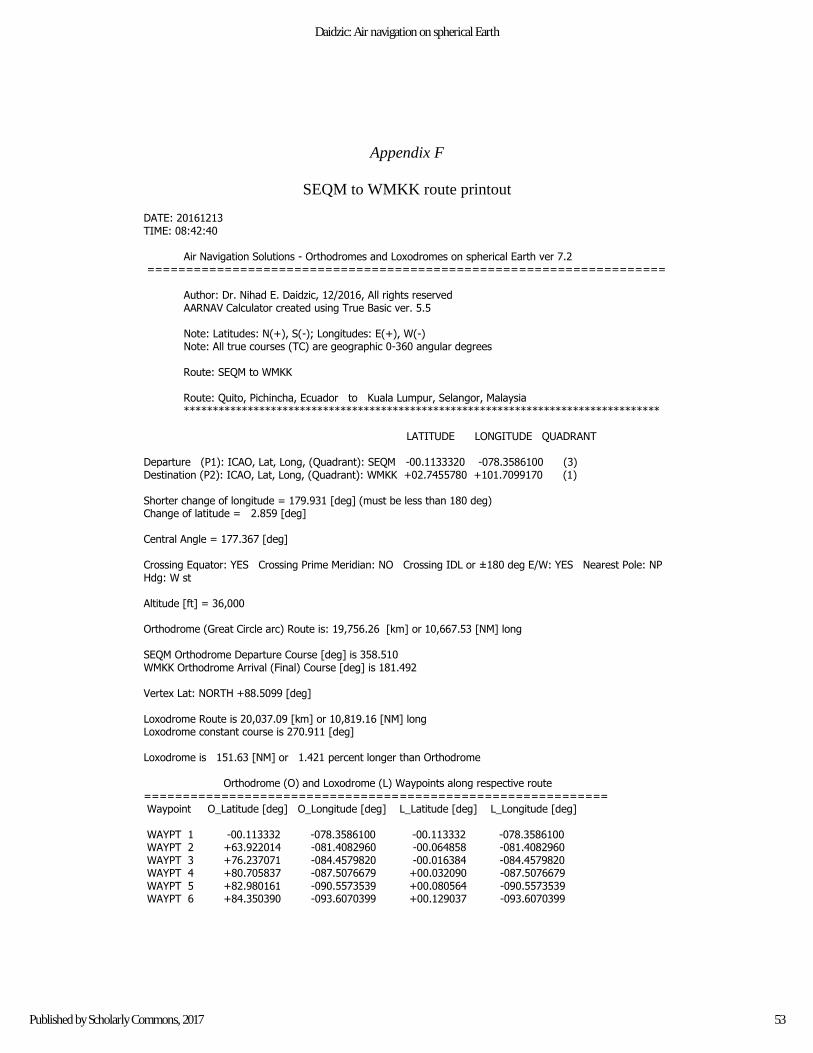
Appendix F
SEQM to WMKK route printout DATE: 20161213 TIME: 08:42:40 Air Navigation Solutions - Orthodromes and Loxodromes on spherical Earth ver 7.2 =================================================================== Author: Dr. Nihad E. Daidzic, 12/2016, All rights reserved AARNAV Calculator created using True Basic ver. 5.5 Note: Latitudes: N(+), S(-); Longitudes: E(+), W(-) Note: All true courses (TC) are geographic 0-360 angular degrees Route: SEQM to WMKK Route: Quito, Pichincha, Ecuador to Kuala Lumpur, Selangor, Malaysia ********************************************************************************** LATITUDE LONGITUDE QUADRANT Departure (P1): ICAO, Lat, Long, (Quadrant): SEQM -00.1133320 -078.3586100 (3) Destination (P2): ICAO, Lat, Long, (Quadrant): WMKK +02.7455780 +101.7099170 (1) Shorter change of longitude = 179.931 [deg] (must be less than 180 deg) Change of latitude = 2.859 [deg] Central Angle = 177.367 [deg] Crossing Equator: YES Crossing Prime Meridian: NO Crossing IDL or ±180 deg E/W: YES Nearest Pole: NP Hdg: W st Altitude [ft] = 36,000 Orthodrome (Great Circle arc) Route is: 19,756.26 [km] or 10,667.53 [NM] long SEQM Orthodrome Departure Course [deg] is 358.510 WMKK Orthodrome Arrival (Final) Course [deg] is 181.492 Vertex Lat: NORTH +88.5099 [deg] Loxodrome Route is 20,037.09 [km] or 10,819.16 [NM] long Loxodrome constant course is 270.911 [deg] Loxodrome is 151.63 [NM] or 1.421 percent longer than Orthodrome Orthodrome (O) and Loxodrome (L) Waypoints along respective route ============================================================ Waypoint O_Latitude [deg] O_Longitude [deg] L_Latitude [deg] L_Longitude [deg] WAYPT 1 -00.113332 -078.3586100 -00.113332 -078.3586100 WAYPT 2 +63.922014 -081.4082960 -00.064858 -081.4082960 WAYPT 3 +76.237071 -084.4579820 -00.016384 -084.4579820 WAYPT 4 +80.705837 -087.5076679 +00.032090 -087.5076679 WAYPT 5 +82.980161 -090.5573539 +00.080564 -090.5573539 WAYPT 6 +84.350390 -093.6070399 +00.129037 -093.6070399
53
Daidzic: Air navigation on spherical Earth
Published by Scholarly Commons, 2017
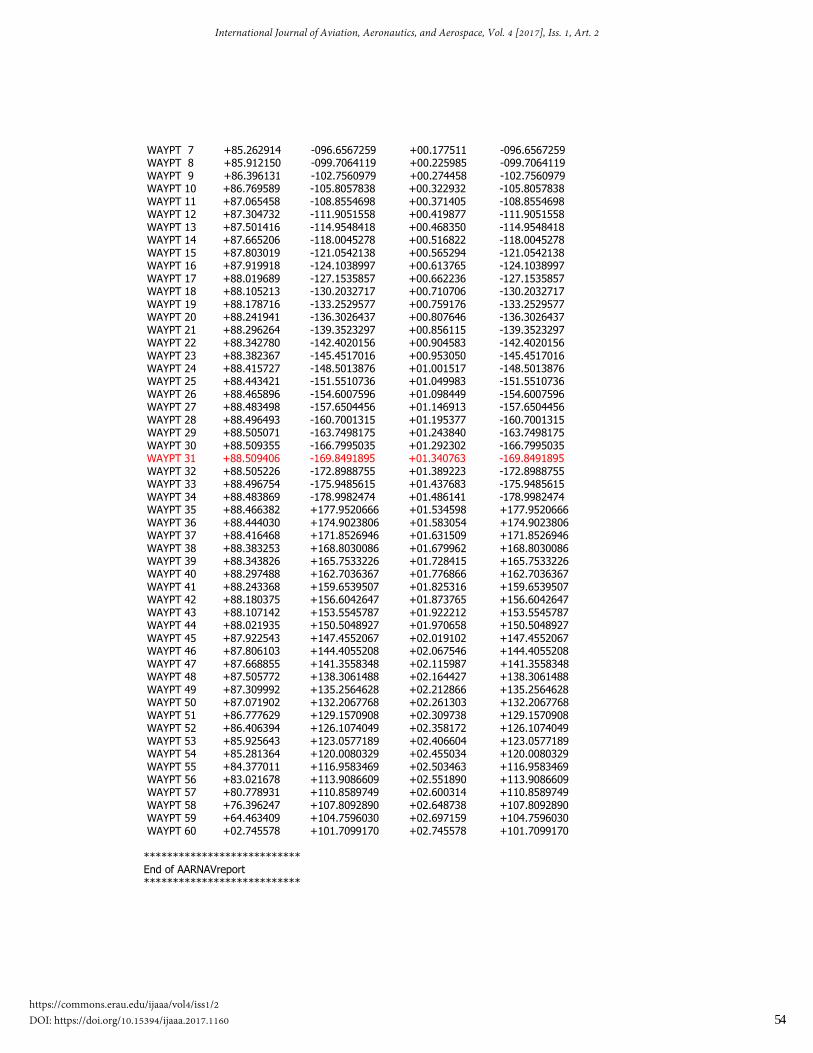
WAYPT 7 +85.262914 -096.6567259 +00.177511 -096.6567259 WAYPT 8 +85.912150 -099.7064119 +00.225985 -099.7064119 WAYPT 9 +86.396131 -102.7560979 +00.274458 -102.7560979 WAYPT 10 +86.769589 -105.8057838 +00.322932 -105.8057838 WAYPT 11 +87.065458 -108.8554698 +00.371405 -108.8554698 WAYPT 12 +87.304732 -111.9051558 +00.419877 -111.9051558 WAYPT 13 +87.501416 -114.9548418 +00.468350 -114.9548418 WAYPT 14 +87.665206 -118.0045278 +00.516822 -118.0045278 WAYPT 15 +87.803019 -121.0542138 +00.565294 -121.0542138 WAYPT 16 +87.919918 -124.1038997 +00.613765 -124.1038997 WAYPT 17 +88.019689 -127.1535857 +00.662236 -127.1535857 WAYPT 18 +88.105213 -130.2032717 +00.710706 -130.2032717 WAYPT 19 +88.178716 -133.2529577 +00.759176 -133.2529577 WAYPT 20 +88.241941 -136.3026437 +00.807646 -136.3026437 WAYPT 21 +88.296264 -139.3523297 +00.856115 -139.3523297 WAYPT 22 +88.342780 -142.4020156 +00.904583 -142.4020156 WAYPT 23 +88.382367 -145.4517016 +00.953050 -145.4517016 WAYPT 24 +88.415727 -148.5013876 +01.001517 -148.5013876 WAYPT 25 +88.443421 -151.5510736 +01.049983 -151.5510736 WAYPT 26 +88.465896 -154.6007596 +01.098449 -154.6007596 WAYPT 27 +88.483498 -157.6504456 +01.146913 -157.6504456 WAYPT 28 +88.496493 -160.7001315 +01.195377 -160.7001315 WAYPT 29 +88.505071 -163.7498175 +01.243840 -163.7498175 WAYPT 30 +88.509355 -166.7995035 +01.292302 -166.7995035 WAYPT 31 +88.509406 -169.8491895 +01.340763 -169.8491895 WAYPT 32 +88.505226 -172.8988755 +01.389223 -172.8988755 WAYPT 33 +88.496754 -175.9485615 +01.437683 -175.9485615 WAYPT 34 +88.483869 -178.9982474 +01.486141 -178.9982474 WAYPT 35 +88.466382 +177.9520666 +01.534598 +177.9520666 WAYPT 36 +88.444030 +174.9023806 +01.583054 +174.9023806 WAYPT 37 +88.416468 +171.8526946 +01.631509 +171.8526946 WAYPT 38 +88.383253 +168.8030086 +01.679962 +168.8030086 WAYPT 39 +88.343826 +165.7533226 +01.728415 +165.7533226 WAYPT 40 +88.297488 +162.7036367 +01.776866 +162.7036367 WAYPT 41 +88.243368 +159.6539507 +01.825316 +159.6539507 WAYPT 42 +88.180375 +156.6042647 +01.873765 +156.6042647 WAYPT 43 +88.107142 +153.5545787 +01.922212 +153.5545787 WAYPT 44 +88.021935 +150.5048927 +01.970658 +150.5048927 WAYPT 45 +87.922543 +147.4552067 +02.019102 +147.4552067 WAYPT 46 +87.806103 +144.4055208 +02.067546 +144.4055208 WAYPT 47 +87.668855 +141.3558348 +02.115987 +141.3558348 WAYPT 48 +87.505772 +138.3061488 +02.164427 +138.3061488 WAYPT 49 +87.309992 +135.2564628 +02.212866 +135.2564628 WAYPT 50 +87.071902 +132.2067768 +02.261303 +132.2067768 WAYPT 51 +86.777629 +129.1570908 +02.309738 +129.1570908 WAYPT 52 +86.406394 +126.1074049 +02.358172 +126.1074049 WAYPT 53 +85.925643 +123.0577189 +02.406604 +123.0577189 WAYPT 54 +85.281364 +120.0080329 +02.455034 +120.0080329 WAYPT 55 +84.377011 +116.9583469 +02.503463 +116.9583469 WAYPT 56 +83.021678 +113.9086609 +02.551890 +113.9086609 WAYPT 57 +80.778931 +110.8589749 +02.600314 +110.8589749 WAYPT 58 +76.396247 +107.8092890 +02.648738 +107.8092890 WAYPT 59 +64.463409 +104.7596030 +02.697159 +104.7596030 WAYPT 60 +02.745578 +101.7099170 +02.745578 +101.7099170 *************************** End of AARNAVreport ***************************
54
International Journal of Aviation, Aeronautics, and Aerospace, Vol. 4 [2017], Iss. 1, Art. 2
https://commons.erau.edu/ijaaa/vol4/iss1/2DOI: https://doi.org/10.15394/ijaaa.2017.1160