Lienard Equation

of 9
-
Upload
menguemengue -
Category
Documents
-
view
230 -
download
0
Transcript of Lienard Equation
-
7/27/2019 Lienard Equation
1/9
IEEE TRANSACTIONS ON CIRCUIT THEOR Y, VOL. CT-17: NO. 3, AUGUST 1970where
313
cl -1 J a (% + n*)!nx.n, = 2(a + b) i n,!n,!. [-&-[~]~i2. (98)
The power-series equivalence has thus enabled us toobtain an explicit expression for the coefficients of thetwo-dimensional Laguerre series expansion of h2(~1, r2)given by (90).
1'1. SUMMAItYThe concept and application of power-series equivalenceof functional series has been developed in this paper.Techniques using this equivalence were developed fordetermining the series expansion of a function, summingfunctional series, analyzing the truncation error, anddetermin ing functional series inverse. It is importantto note that the applications do not depend on orthog-onality but rather on the power-series equivalence.
In fact, all the sets of functions discussed, except forthe Laguerre functions, are not orthogonal. Althoughthe power-series equivalence was developed using theLaplace transform, it should be noted that the equivalencecan be obtained for other functional series using differenttransformations such as the 2 and the Mellin trans-forms 191.
ACKNOWLEDGMENTThe author would like to thank Dr. S. Chang of North-eastern University for his helpful comments and sug-gestions.
REFERENCES[l] Y. W. Lee, Statistical Theory of Communication. New York:Wiley, 1960, chs. 18, 19.[2] P. R. Aigrain and E. M. Williams, Design of optimum transientresponse amplifiers, Proc. IRE, vol. 37, pp. 873-879, August1949.[3] E . A. Guillc :min, Theory of Linear Physical Systems. New York:Wiley, 196 3, ch. 17.[4] C. J. R. II )eal, Optimum Laguerre series expansion of func-tions, M.S. thesis, Dept. of Elec. Engrg., MassachusettsInstitute of Technology, Cambridge, September 1962.[5] G. J. Clowes, Choice of the time-scaling factor for linearsystem approximations using orthonormal Laguerre functions,IEEE Trans. Automatic Control (Corresaondence). vol. AC-lo.[cl[71PIPI
[lOIf111
pp. 487-489, October 1965. ~ _ Newton, Gould, and Kaiser, Analytical Design of LinearFeedback Controls. New York: Wiley, 1957, pp. 366-381,Appendix E, Table ofW. H. Kautz, Tra Integrals.nsient synthesis in the time domain,IRE Trans. Ckcuit Theory, vol. CT-l, pp. 29-39, September1954.G. N. Watson, A Treatise on the Theory of Bessel Functions,2nb--. ----__~-. --.d. T,ondon: Cambridge University Press, 1962, ch. 16.Bateman ManuscriptNew York: Mc( Project, Tables of Integral Transforms.fraw-Hill, 1954.H. B. Dwight, 2 ables of Integrals and Other Mathematical Data.New York: Macmillan, 1947, eq. 417.2.N. Wiener, Nonlinear Problems in Random Theory. Cam-Pr$l&y: Technology Press of M.I.T.; also, New York: Wiley,[12] M. Schetzen, Measurement of correlation functions, Proc.IEE (London), vol. 3, pp. 2100-2104, December 1964.
Existence and Uniqueness Results for Lihards EquationItUI J. 1. DE FIGUEIREDO, MEMBER, IEEE
Abstract-A new set of conditions for the existence and unique-ness of the periodic solution of the equation 5 + f(z)~? + g(z) = 0(superscript dot := d/d) is given. Lyapunov-like functions are usedin the derivation of the results. This permits the formulation of theexistence and uni~queness conditions in a simple yet general way. Thepresent conditions include those of Lienard and Levinson and Smithwhen particularized to the above equation. They also permit the in-clusion of most of the cases of two-stroke oscillators covered by theauthors previous theorems for equations of the above type. Period-icity results for the forced equation Z+ /(X)X + g(k) = e(t) with e(t)periodic and bounded are also given.
Manuscript received September 10, 1968; revised April 3, 1969,and August 29, 1969. This research was partially supported by theNational Science Foundation, Grant GU-1153. The result of Sec-tion II and the Appendix were derived by the author in 1964 while onleave at the University of Illinois, Urbana, and appeared in [9].The author is with the Departments of Electrical Engineeringand Mathematical Sciences, Rice University, Houston, Tex. 77001.
I. INTRODUCTION
YIODERN developments in solid-state devices
A and circuits continue to lay emphasis on thegeneration of nonlinear oscillations (see, e.g., [l]),and perhaps no other equation has been more widelyused to model nonlinear oscillators than Lienards [2].For the purpose of both the analysis and design of varioustypes of nonlinear oscillators, it is therefore of considerableinterest to look for (sufficient) conditions, as genera las possible, under which Lienards equation admitsone or more periodic solutions.The three most commonly considered forms of Lienardsequation are3 + f(z)iT + x = 0 * = cl/& (1)
-
7/27/2019 Lienard Equation
2/9
314 IEEE TRANSACTIONS ON CIRCUIT THEORY, AUGUST 197052 + f(x)2 -t g(x) = 0 (2)
z + f(x, ci$k + g(x) = 0. (3)The existence and uniqueness conditions for theperiodic solution of (1) given by Lienard [3] and forthe more general forms (2) and (3) formulated byLevinson and Smith [4] were further generalized by theauthor in [5] and [6]. In particular, the previous require-ment that the damping coefficient function f be non-negative for large 1x1was dropped in favor of the followingless restrictive condition: j(x) 2 -p (where fi is a non-negative constant that depends on g) for negative xof large absolute value, provided f(x) is sufficientlypositive for large positive x; similarly if x is replacedby -x. This kind of requirement appears in the presentpaper via a set of conditions that relate F(x) and G(x)for 5 > 0 to the same for :c .< 0, where
satisfying a condition (such as a Lipschitz condition)that assures local uniqueness of the solutions of (2)everywhere on the (x, ?) plane.If g(x) is such that xg(x) > 0 for x # 0, as will beassumed here, G(z) increases monotonically from 0 asx varies from 0 to f ~0. Then the restrictions of z = G(x)to the intervals [O, a) and (- a, 01, denoted, respectively,by G+(x) and G-(z), have unique inverses G;(x) andG?(z).
F(x) = 1 f(s) ds0 (4)
In the Lienard plane, (2) takes the form5 = y - F(x) (74 g = ---g(x). Ub:)
In a conventional way, solutions of (7), visualizedas curves in the (x, y) plane, will be called orbits, andconnected subsets of orbits will be called arcs of orbits.According to our assumption on g, the origin is theonly critical point of (7), and hence x(t) = 0 is the onlytrivial (constant) periodic solution of (2). All nontrivialperiodic solutions of (2), henceforth referred to simplyas periodic solutions, correspond to closed curves inthe (x, y) plane consisting of regular points of (7). Suchcurves will be called periodic orbits.
G(x) = J:; g(s) ds. (5)This perm its a formulation of the existence and unique-ness conditions in a simple yet general way, and providesa deeper insight into the extent of asymmetry in f thatwill still guarantee the existence of a periodic solutionof (2).The proofs of the present results depend on Lyapunov-like functions for constructing bounds for the solutionsof (2) in the Lienard plane and for establishing orbitalasymptotic stability of the periodic solution and thusits uniqueness.
As a direct extension of an earlier result on the vander Pol equation [6], p. 89, we state, in the followingsection, a set of conditions for the ex istence of a periodicsolution of (2). These are similar to the conditions thatappeared in [7].In Section III our conditions for the uniqueness ofthe periodic solution of (2) are developed.The forced equationL + f(x)2 + g(x) = 40 0%
with e(t) periodic and [e(2)] bounded is then consideredin Section IV. It is shown. that, under our existenceconditions of Section II and certain other restrictions,there is a bounded region R, in the Lienard plane suchthat every solution of (6) that begins in RI at somet = to remains in RI for all % > to. It then follows, by astandard fixed point argument, that (6) has a periodicsolution with the period of e(t). The main feature ofthis result as compared to similar ones by other authors[S] is that again we do not require that f(x) 2 0 for bothpositive and negative z of large absolute value.Finally (in Section V), the above conditions are verifiedfor some examples.We will assume throughout that f and g are real-valued
II. EXISTENCE CONDITIONSFor x < 0 and E an arbitrary constant, we define
q(x) = max F(s) (8)z5ssoFL(X) = F(x) + E (9)He(x) = 77(x) + e - [(F(x) - dxN2 + 2Gk41 (10)K,(x) = [F,(G;(4H%)))12 + H:(x)
- [77(x) + E + dmw (11)The following ,hitherto unpublished result of theauthor [9] is proved in the Appendix.
Theorem 1Equation (2) [or equivalently, the system (7)] hasat least one periodic solution provided all of the followingconditions are satisfied:a> w(x) > 0b) f(O) < 0;
2 # 0;c) on the half-line x 2 0, F(z) is bounded below;
let --a! denote inf,,,, F(z);d) H,(x) < 0 on some interval a I x I 5, wherea
-
7/27/2019 Lienard Equation
3/9
DE FIGUEIREDO : EXISTENCE AND UNIQUENESS RESULTS FOR LIONAdS EQUATION
decreases from 0. In the regions of x where H,(x) < 0,one would finally examine whether Ku(x) assumes anonnegative value at some point x1, as required by e).The following more restrictive statement of the pre-ceding theorem is required in connection with the resultof Section IV.Corollary 1
Suppose the assumptions of Theorem 1 hold exceptfor conditions d) and e), which are replaced by thefollowing condition:(d) there is a x1 < 0 such that H,(x) < 0 andK,(x) > 0 for x < x1.
Then (2) [and correspondingly (7)] has at least one periodicsolution.Remark S
If in Theorem or Corollary 1 we restrict F(x) to increasemonotonically with -x for x < 0, the expressions forH,(z) and K.(x) simplify toH,(x) = F,(z) - w?%@ (12)
K,(x) = [F,(G;1($H2,(x)))]2 - 4F,(x) V2G(z). (13)Wax [7] concerns the study of the existence ofperiodic solutions of (7). The geometrical constructionof the Poincar&-Bendixson (P-B) region in [7] differssomewhat from that used in the proof of Theorem 1,given in the Appendix. The reader is referred to [7] fordetails on the construction presented in it as well as foradditional restrictions that permit the reduction ofthe size of the P-B region.
III. UNIQUENESS OF PERIODIC SOLUTIONThe approach to be followed represents an extensionof that in [5] and [6]. By means of a transformation ofvariables, the system (7) will be expressed as a differ-ential equation in v and p, where v2 is a Lyapunov-likefunction (while in [5] and [6] a Euclidean distance functionhad been used) and cp acts like the polar angle in the(x, y) plane. The uniqueness of the periodic orbit of (7)will then be established by way of a stability argument.Specifically, we will assume that g(x) satisfies con-dition a) of Theorem 1 and alsoa,) lim [g(x)/x] exists and is # 0
z-0a,) G(x) -+ 00 as x + A 0~ (14)a,) 2G(x) + y2 - F(x)y # 0 V(x, y) # (0, 0).It is then possible to introduce the transformationof variables
x = G;($v2 sin (p> + if O 0 forx # 0, g, G, and F satisfy the conditions al)-a,) and2Gb)fb) - F(x)g(x) > 0 (20)
on the real line - ~0 < x < m, except possibly on aset of Lebesgue measure zero, then the periodic solutionof (2) is unique (except for translations along the t axis).Proof: It will be shown that, under the conditionsof the present theorem, every periodic orbit L of (7)is such that every arc of orbit that begins (at some timet = t,,) in a sufficiently small neighborhood of L tendsto L as t --+ 00. This and the fact that the origin is theonly critical point of (7) imply that L is unique, byvirtue of a well-known theorem of Bendixson [lo].Suppose then that P, is an arbitrary point on L, andlet Q0 be a point on the ray through P,, located outside
-
7/27/2019 Lienard Equation
4/9
316 IEEE TRANSACTIONS Oh CIRCUIT THEORY, AUGUST 1970
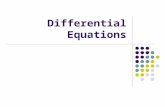
IFig. 1.
L, and sufficiently near I, so that for some 6 > 0 thefollowing is true (Fig. 1). a) The orbit of (7) throughQO, when followed clockwise from Q,,, remains outside L(since no two orbits of (7) can cross) intersecting rqp,for the first time (when cp =. q0 + 27r) at some point Q1.b) The arc Q,Ql lies in the E neighborhood of L. c) Inthe Eneighborhood of every point of L, the transformation(x, y) ---f (v, cp) s one-to-one [since (17) does not vanish],and hence the rays r,, p,, dv dp. (23)PaSince dv is positive and sin cpas well as g have the signof x, condition (20) guarantees that the integrand in(23) is positive except possibly on a set of Lebesguemeasure zero. Hence
6 log vc,o+2d(P> < 6 log V(,d(PO)which, by (21), is the same as
(24)
Fig. 2.
log qp,)(Qo) - log vc,.,(QJ > 0. (25SJSince v and hence log v increase monotonically onr in the direction away from the origin, (25a) impliest&t Q1 is nearer L than Q,,. This shows that L is thepositive limit set of the orbits of (7) in a neighborhoodof L outside L. A similar argument, applied to an arcRoR1 of an orbit of (7) located inside, and in the im.-
mediate vicinity of L completes the proof of the stabilityproperty of L. Hence the result of the theorem follows.Q.E.D.A variant of Theorem 2 may be obtained by assumingthat there is a x0 > 0, so that condition (20) holds onlyonx < Oandx > x,andthatxF(x) < OonO < 1x1< x0,F(x) > 0 on x > x,,, and G(x,) = G(-x0).Then since xF(x) < 0 on 0 < (x1 < x0 and G(x,) =G(-x,), L lies outside the closed curve 2G(x) + ya =2G(x,), which intersects the x axis at x = fx,. Let Lintersect the vertical x = x0 at P, (where (D = rp,,) and P,(where cp = cpJ in the upper and lower half-planes,respectively, as shown in Fig. 2. In this figure, pointsQ0 and Q1 are as before, QZ is the intercept of r,, withQ,Q1, P,, Q1 and P,, Q5 are the negative and positivey axis intercepts of L and Q,Q1, and Q3 and Q, are lowerand upper half-plane intercepts of QOQ1 with x = x0.By the argument used previously it is
6 log v(,o) (PO> > fJ 1% V(,,) (Pl>and
6 log V(T) P2> > 6 log fJ(2,) Pd.To show that also
6 log vc,*)(P*) > 6 log V(r) (P2>and
clear that(26)
(27)
(3)
6 log V(h) (PA > 6 log V(q*+h) (PO>,we first obtain from (16a) and (7)
(29)
d log v-=-- d4W4dx v(y - F) (30)The one-to-one correspondence between points onP,P, and Q5Q6, and those on PIP, and Q3Q4, is thenestablished by the verticals x = .& 0 < 2: 5 x0. If P and Qare the corresponding points on P,P, and Q,Q, withx = ,$we will denote v at P and Q by vCo(P) and v(t)(Q),
-
7/27/2019 Lienard Equation
5/9
DEFIGUEIREDO: EXISTENCE AND UNIQUENESS RESULTS FOR LIiNARD'S EQUATION 317and define
6 log V(E)V=> = log v(t) (Q> - log VW U>- (31)By (30) and in a way similar to that used in the deri-vation of (23), we get
+ I yv3(ygFy2y(y - F) + v] dv dx. (32)Here y, y - F, v, dv, and g are positive and F < 0on (0, 2,). Hence the integrand is negative leading tothe result6 log V(O)P3) > 6 log V(z,) PO>
= log 4&d - log v(.,)(Jo). (33)Finally, since F > 0 on Q6Q1, v decreases on this arcwith the consequence
log v(z,,)C&o) = log 4&o> > log d&d= log v(p.+zr) C&d. (34)Thus (33) and (34) imply (29). In much the same way,(28) is established. From (26)-(29), (25a) follows.The corresponding result for the inner arc of orbitR,R, is derived similarly as above arid so needs no furtherelaboration.We have thus established Theorem 3.
Theorem 3Let the conditions of Theorem 2 hold except for theinequality (20), which applies only on the intervalsx < 0, z > x,,, where x0 is a positive constant such thatxF(x) < 0 on 0 < 1x1 < x0, F(x) > 0 on x > x0, and
C(x,) = G( -x0). Then the periodic solution of (2) isunique (except for t translations).Remark 4
If g(x) = x, the inequality (20) is simplified to1;CL f(x) - WGW > 0 (204band Theorem 4 is reduced to the uniqueness theoremof [5].Rema& 5
Let A, denote the interval of the x axis on which theperiodic orbit is defined and A, the subset of the x axis
Remark 6Theorems 2 and 3 are valid if conditions aa) and (20)hold on a neighborhood of every possible periodic orbitof the system. Thus for the validity of the result of thesetheorems it is not necessary that as) and (19) hold onthe whole (x, y) plane.
IV. THE FORCED EQUATIONTurning our attention next to the forced equation (6)!we note that the following is true.
Theorem 4Assume that f and g satisfy the conditions of Corollary 1and, in addition,la) G(z) - c1 lzjpl as x + - 00 and G(z) - c2xnaasx + ~0, where c1 and cP > 0 and min { pl, pz} =
P > 1;b) H,(x) -+ - ~0 and K,(x) -+ ~0 as x + -a;4 IF( + 41 is bounded as x + ~0, and
F((l + ~)x)/F(x) ---f 1 as x -+ a and K -+ 0;d) lim,,-, [o(x>+a+ ~12/([F,(G;(~~,2(~)))12+ H,~(x)) exists and is equal to a constant dif-ferent than 1;e) e(t) is periodic with a period T and le(t) 1 I: E < 03then (6) has a periodic solution with period T.Remark 7
In connection with the proof of the above result it ishelpful to introduce some additional notation as wellas make certain asymptotic estimates. LetA,(x) = v(x) + fx -[@xx) - rl(s>Y
+ 2(G(x) + E~x)]~ (35)-C?+(x) = G+(x) + Ex x20 (364
e;l(u) = inverse function of e+(x) 0 5 u < 03 (36b)t(x) = (v(x) + (Y + 42G(z)) (37)
w = w(x) = G;(+H,2(x)) (35)8 = G(x) = &(&(.x)). (39)
Condition a) implies that
lim ,() v(x) + a - [(F(x) - dx)) + Wx)[l + E(x/G(x))]]*l/+-m H, = Jl H&d= 1. (40)
on which (20) is required, to hold. It is clear from the Henceway Theorems 2 and 3 were proved that the result of &Ax) - H.(x) as%-+ ---co (41)these theorems holds if A, r\ A, is an interval of positivelength (the sign > being replaced by 2 over the re- 1 If p(z) and $(z) are real-valued functions, we say that p(z) -maining part of A,). +(2) as z --) m or - oD, 3 lim,,, or _m [ca(z)/~(2)~ exists and isequal to 1.
-
7/27/2019 Lienard Equation
6/9
318and by condition b),
A,(x) - a-H,(x).Condition a) also implies that
6+(x> - G+(x) asx--+ 00and hence
c;r;(u) - G;(u) asu-+ ~3.Condition b) and (41) and (44) then lead to
(42)
(43)
(44)Alim z = lim0 (1 + +JJ =z-i-m UO1 Wn-0
orZiJNW asx+ --a~.
Since Hi(x) = G+(w), it follows fromdition a) that as x -+ - ~02G+o=-----1.,(d) I?H&d G.,(w) w=
1 (454
(45b)(45) and con-
Finally from (45) and condition (c) we obtainlh F&X4) _ 1r+--m Fcr w(x)>
= lim F,(l + 44 _ 1.w-v22 F&d
(46)
(47)
HenceF,(G) = F,(O + K>w> F,(w)
aSW+ m;K+o. (49)Equipped with the abo-ve estimates we may proceedto establish the validity of our assertion.Proof: Equation (6) is; equivalent to the system,
L = y -- F(x) (5047j = -g(x) + e(t). (5W
To prove our result, it will be sufficient to construct,in the (x, y) plane, a bou.nded region R, so that everysolution (x(t), y(t)) of (50) that begins in RI at somet = to remains in RI for all t 2 to. Then the conclusionof Theorem 4 is assured by the following well-knownargument [6], [8], [ll]. Since (x(t), y(t)) --) (x(t + T),y(t + T)) is a topological mapping of R, into itself, ithas a unique fixed point by Brouwers theorem, thiscorresponding to a periodic solution of (50) with period T.The region RI is the one bounded by the closed curvel-2-34-5-6-7/-l shown in Fig. 3 whose componentarcs are defined as follows (the coordinates of the point i,i= 1 . . . 7, being denoted by (xi,, yi,)).Let 3dlbe he constant of Corollary 1. We take xl, 2 xland sufficiently negative, and let yl, = 7(x1,).
IEEE TRANSACTIONS ON CIRCUIT THEORY, AU GUST 1970
c
Fig. 3.
The arc l-7 is defined by$(y - ~(x,,)) + G(x) - Ex = G(x,,) - Ez,,
so thatY7 = v(x,,) + [2{G(xu) - Ex#.
Arcs l/-2 and 4-5 are verticals and henceX2 = 21,YZ, = F(x,r)25 = 24Y5, = F(xv) = F(x4,).
Arc 2-3 is defined by3~ - dx,,>> + G(x) + Ex
= +(F(x,,) - TI(x,,>)~ + G(x,,) + Ex,,so that
X3 = 0Y3, = I&(x,.) - CY.
(51)
(52)
(53)
(54)
(55)
(56)According to (41), y3 can indeed be made to intersectthe negative y axis, in accordance with Fig. 3, the inter-cept being as negative as desired provided x1, is sufficientlynegative.Finally, arcs 3-4 and 5-6 are described by equationssimilar to (79) and (82) with the function G(t) replaced,respectively, by G(t) + Et and G(4) - Et. This gives
and
X4 = &(%(YY + 47 (57)y4 = -a
56 = 0 (5%Y6 = --a! + [(F(xv) + a) + 2(G(x,r) - Ex~)]~.
By (54), (57), (44), (56) and conditions a) and b),25 --+ 02 as 51 ---) - 02. This and condition a) showthaty,,+ ~0 aszl,+--.Using definitions (35)-(39) and combining (52), (53),
-
7/27/2019 Lienard Equation
7/9
DEFIGUEIREDO: EXISTENCE AND UNIQUENESS RESULTS FORLIiNARD'S EQUATION 319(56), (57), (54), and (58), we obtain For (63), the constant LY n condition c) of Theorem 1(Ye* + d - (w + 4 is 2p/3. Then accord ing to (10) and (ll), for x < - 1H,(x) = gp - [p(-g - x + ix) + xy 03%= [Fa(Zi)(x1 .))]2 + 2G(ti(q,)) - 2Eti(cq,) K,(x) = P% - IHJ4l + wa(4118- [dx1,> + Q!+ {2(G(x,,) - Edl2l2 .+ fax) - ($P + 14>2. (67)
- F'&X~~~>>12 + WN~G,N - Eh,) (59) Both H,(x) < 0 and K,(x) > 0 for x I -2.4 andsince as x1 + - = [and hence &(x1,) -+ a], tend, respectively, to - 03 and + 00 as x -+ - 00 (for
G(ti(xl,)) - Eti(x,,) - G(G(x1,)) p = 1). So the conditions of Corollary 1 are clearly met@) by (63).and Since
G(xt,) - Ex,, - G(x,,). (61) f(x) - ; F(x) = ? x2 033)Finally, rearranging (59) and invoking (ll), (46),(49), and condition d), we conclude that as x1 --$ - 03, condition (2Oa) is fulfilled, while assumption a,) of Section[F (2;(x1.))/~,(w(xl~))]2[F,(~(x~~))]2 ~[G(~(x,,))/H~,(x~,)IH~~(x~,) F&I,)(?/Of a) - (Y7 + a)2 -K&1,) L [Fa(W(X,~)>12 m%,) - E(Xl,)
- K&G,).Since the right side of (62) is continuous and tendsto 03 as x1 -+ - ~0, for a sufficiently large but finitex1, we have y,, > y$. Thus the curve r does indeedhave the shape assumed in Fig. 3 with 6 above 7.It is easily verified that everywhere on r a solutionof (50) starting on r does not leave R, as t increases.What, precedes is thus sufficient to establish the validityof Theorem 4.
V. EXAMPLESThe existence and uniqueness criteria of the precedingsection apply, with certain qualifications, to the (sym-
metrical) van der Pol equation2 + p(-1 + x2>* + x = 0, (63)
to the asymmeirical van der Pol equation [4]3 + p[- 1 + (x -- a)]? + 2 = 0, (64)
where in (63) and (64) p and a are such that 0 < p < 2and 0 < a < 1, and to the Goodwin oscillator equationz + f(x)2 + 2 = 0 (654
where3f(x) =
1-m1 2 < 2, (65b)
m2 2 > 2,. 0354Here x,, ml, and m, are positive constants and
4 > rni > 4m,/(l - ml). (654We will discuss in detail (63), for p = 1 and (65).Similar but not the same considerations apply to (64).2 The Goodwin oscillator is an example of a two-stroke oscil-lator introduced by Le Corbeiller [12] and amply discussed in theliterature [12], [6].3 It is easily shown that the simple discon tinuity off at 2, doesnot affect our results.
64III is satisfied (for p = 1) in the regionQ: {(x,y);x < 3andy > 0,
x > -3 and y < 0). (69)This is obtained by writing2G(x) + y2 - F(x)y = y2 + pxy + x2 - Spx3y (704
= y2 + p(x - +x3>y + X2) VWand noting that (70a) is positive in the second and fourthquadrants; and that the discriminant of the quadraticform in y in.(70b) is negative for x2 < 9.
It thus -follows that (63) satisfies the conditions ofTheorem 2 in 0.Finally it is a simple matter to verify that (66) and(67) as well as G(x), F(x), f(x), v(x), and Q associatedwith (63) satisfy the conditions of Theorem 4.For both (63) and (64) with p = 1, the regions Rconstructed in the proof of Theorem 1 are shown inFigs. 4 and 5. The outer boundary I2 for each R is thesmallest such curve since it corresponds to H,(xl) = 0.These figures are taken from [6], p. 89. In fact, the methodof construction originally used with these figures in [6]prompted its extension to the general case of (2) in theproof of Theorem 1 of the present paper.Let us now consider system (65). In this case, OL =mlx, and v(x) = ml 1x1 or x < 0. According to Remark 3,for x sufficiently negative
H,(x) = ---(I - ml> 1x1 + ml%, (71)K,(x) = II- m2 + m1m2)x,
+ mdl - ml> Isll - 4m,(x, + 1x1)1x1 (72)which show that the conditions of Corollary 1 are satisfiedby virtue of (65d) (see Fig. 6 for the region R). Thesetwo sets of inequalities also guarantee satisfaction ofassumption a,) of Section III. Also, the left side of (20a)
-
7/27/2019 Lienard Equation
8/9
320 IEEE TR.ANSACTIONS ON CIRCUIT THEOR Y, AU GUST 1970
Fig. 4. Fig. 5.
Fig. 6. Fig. 7.vanishes for x 5 x, and is positive for x > x,. HenceTheorem 2, amended by Remark 5, assures the uniquenessof the periodic solution of (55). Finally, if a boundedperodic forcing term is add.ed to (65a) it is easily verifiedthat this system satisfies all the conditions of Theorem 4.
VI. C0NCLUR10NNew conditions have been obtained for the existenceand uniqueness of the periodic solution of the (unforced)Lienard equation as well as for the existence of a periodicsolution of this equation with period T when it is forcedby a bounded periodic function of period T. Becauseof the asymmetry in the nonlinear functions appearingin the equations, which these conditions allow, it isbelieved that the present results are particularly suitablefor application to various modern solid-state circuitssuch as tunnel-diode and transistor oscillators.Extensions of the presen.t results to the case of many
limit cycles and to higher order systems have been made,and are to appear elsewhere [13]-[16].
(4) imply the existence of a 6 > 0 such that xF(s) < 0for 1x1 5 6. We let lYl (Fig. 7) be defined by the closedcurve
wheretv + G(x) = Y (734
y = min (G(6), G(-6)). (73b)Such a rl surrounds the origin, the only critical pointof (7), and thus excludes this point from R as is required.pz is the closed curve 1-2-3-4-5-6-7-1 constructedin the following way, the coordinates of the points i,i = 1, . . . , 7, being denoted by xi, yi.We begin at 1, whose coordinates are the value of x1defined in e) of Theorem 1 and y, = 7(x1), and proceedclockwise on the arc
+(y - T(x,))~ + G(x) = G(4 (74)to the point 7, its intercept with the positive y axis.Hence
APPENDIX y7 = 0(x1> + m. (75)PROOF OF THEOREM 1 If 1 and 2 do not coincide, i.e., if T(x,) # P(xl) [andAs is often done, the existence of a periodic orbit of h ence > F(z,)], we go down vertically to 2 where(7) under the conditions of ~;he theorem will be establishedby constructing an annular region R in the (x-y) plane 22 = x1 (76)on which (7) is made to fulfill the requirements of thePoincark-Bendixson theorem. pl and I2 will denote yz = F(x,).the inner and outer boundaries of R. The path 2-3 (with 3 on the negative y axis) is de-Condition b) of Theorem 1, the continuity of f, and scribed bJ
-
7/27/2019 Lienard Equation
9/9
DE FIGUEIREDO: EXISTENCE AND UNIQUENESS RESULTS FOR LIhNARD'S EQUATION 321HY - d~>>~ + G(4
= 3(F(x,) - d~,>>~+ G(G)which gives
(77)
X 3= 0 (7%~3 = dx,) - Mxd - dxd2 + 2Gh)l"".Condition d) of Theorem 1 then guarantees that l-3does intersect the y axis below the point (0, --a).
Iirom 3 we go on the curve$(Y + 4 + G(zj = 3(Y3 + 4 (79)
to the point 4 where it intersects the horizontal y = -(II.Hence
X .t = WHY, + a)> wy4 = -a.If -Q # F(G) [and hence < F(G)] we proceed verti-
cally upward to 5 on F(z) so thatx5 = 24yj = F(x4).
5-6 is defined by$(Y + aI2 + G(x) = $4/s + 4 + G(G),
with 6 on the y axis thus having the coordinatesX6 = 0~6 = --c-t + [(F(xd + 4 + ~G(x,)]~.
It is clear from (83) that (82) will indeed intersect they axis somewhere above the point (0, -a).The construction of rz is completed by the verticalsegment 6-7.In order to show that I~ has the shape indicated inFig. 7, it only remains to prove that 6 lies above (orcoincides with) 7. This follows from (75), (7~3, (80),(81), and (83) which, when combined, yield
(Ye + 4 - (Y7 + aI2 = K,(Xl) 2 0 634)the inequality arising from condition e) of Theorem 1.
It is easily verified that everywhere on l, and lYzthe solutions of (7), in the direction of increasing 1,enter R, which establishes the result of our theorem byvirtue of the PoincarQ-Bendixson theorem.
ACKNOWLEDGMENTThe author acknowledges interesting discussions on
the result of Section II and the Appendix , held withDr. N. Wax while he was at the University of Illinois,Urbana.
REFERENCES[I] D. L. Hester, The nonlinear theory of a class of transistoroscillators, IEEE Trans. Circuit Theory, vol. CT-15, pp.111-118, June 1968.[2] B. van der Pol, A theory of the amplitude of free and forcedtriode oscillations, Rad. Rev., vol. 1, p. 701, 1920.[3] 4. LiBnard, fitude des oscillations entretenues, Rev. G&L.Elec., vol. 23, pp. 901-912, 1928.[4] N. Levinson and 0. K. Smith, A ge neral equation for relaxa-tion oscillationsl Duke Math. J., vol. 9, pp. 382-403, 1941.[5] R. J. P. de Figueiredo, Existence and uniqueness of theperiodic solution of an equation for autonomous oscillations, inContributions to the Theory of Nonlinear Oscillations (Annals ofMathematics Studies, no. 45), L. Cesari, J. LaSalle, and S.
Lefschetz, Eds. Princeton, N. J. : Princeton University Press.1960, pp.269-284. [6] -, Contribution to the Theory of Certain Nonlinear Differential&u&ions. Lisbon. Portugal: Junta de InvestinacGes do[71[Sl[91
no1
Ultramar, 1960. -N. Wax, On some periodic solutions of the Lienard equation,IEEE Trans. Circuit Theory, vol. CT-13, pp. 419-423, De-remher 1966L. Cesari, Asymptotic Behavior and Stability Problems inOrdinary Differential Equations, 2nd. ed. Berlin: Springer,1963 nn 176-177It. J:P I-r. -.- -...P. de Figueiredo, Existence and uniqueness results forL&&ds equation, Rice University, Houston, Tex., Tech.Rept., ser. EE66, no. 15, 1966.I. Bendixson. Sur les courbes definies nar des &mationsdiffbrentie lles Acta Math., vol. 24, pp. 1%8, 1901. A[ll] N. Le.vinson,T ransform ation theory of nonlinear differential;;~41,o,n,s of the second order, Ann. Math., vol. 45, pp. 723-1 P. te Corbeiller, Two-stroke oscillators, IRE Trans. CircuitTheory, vol. CT-7, pp. 387-398, December 1960.1 R. J. P. de Figueiredo, A ma ny-limit-cycle hypothesis forLi&rds equation, Arch. Rational Mech. and Anal. (to be
[I21P31[I41 published).
[I51Ml
R. J. P. de Figueiredo and C.-Y. Chang, Ultimate boundednessconditions for n mutually coupled LiBnards equations,Proc. 12th Midwest Symp. on Circuit Theory (University ofTexas, Austin) April 21-22, 1969, pp. X.5.1-X.5.5.-, On the boundedness of solutions of classes of multi-dimensional nonlinear autonomous systems, J. SIAM Appt.Math., July 1969.-, On the existence of globally stable limit sets of .multi-dimensional autonomous systems, Rice University, Houslolr,Tex., Systems Rept. 20-39 (to be published).