LiDAR Applications Overview Summer 2012. Definition LiDAR: Light Detection And Ranging.
26
LiDAR Applications Overview Summer 2012
-
Upload
lindsey-higgins -
Category
Documents
-
view
216 -
download
0
Transcript of LiDAR Applications Overview Summer 2012. Definition LiDAR: Light Detection And Ranging.

LiDAR ApplicationsOverview
Summer 2012

Definition
LiDAR: Light Detection And Ranging

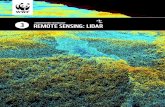
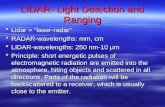
Basic Principles Combination of 3 technologies
– Laser Ranging– GPS– IMU
Active Sensor – Can be acquired at night
Platforms– Fixed or Rotary Wing Aircraft– Terrestrial; Vehicle & Tripod

Basic Principles
IMU

Basic Principles
Pulse Repetition Frequency (PRF) Multi-pulse (in air) Multiple Returns Scan Frequency Scan Angle Platform Speed and Altitude Intensity

LiDAR Categories
Aerial Terrestrial
Mobile StaticTopographic Bathymetric
Fixed Wing Rotary Wing

Aerial SensorsExamples: Optech Leica Riegl

Fixed Wing

Fixed Wing
Cabin Footprint:

Fixed Wing
Typical Applications:
Wide Area MappingFloodPlainsCounties/StatesForestry ApplicationsLandfills/Quarries/Volume AnalysisMost 1’ & 2’ Contour Interval Projects

Fixed Wing
Typical Parameters:
500m – 2000m AMT70kHz – 200kHzPoint Spacing .5m – 2m (Single Swath)Swath 200m – 1km and higher
Focus on covering more ground, more quickly

Rotary Wing
GeoDigital International

Rotary Wing
Typical Applications:
Corridor MappingDOTTransmission

Rotary Wing
Typical Parameters:
Acquisition a couple hundred feet above the groundUpwards of 200kHz10-30 points per meterSwath 200’-1000’
Focus on max point density for small feature ID

Rotary Wing

Static LiDAR
Leica HDS – Scan Station
Riegl VZ-400
Examples:

Static LiDAR
Typical Applications:
RefineriesSubstationsIntersectionsPipesLock WallsCaves/Mines

Static LiDAR
Typical Parameters:
Usually tripod based within a couple hundred feet of targetSeveral points per square foot to several points per inchUsually accompanied with imaging sensor for RGB assignmentControlled with prisms occupying surveyed control points
Focus on max point density for small feature ID and modeling

Static LiDAR

Mobile LiDAR
Optech Lynx Street Mapper
Examples:

Mobile LiDAR
Typical Parameters:
Several points per square footUsually accompanied with imaging sensor for RGB assignmentControlled with targets occupying surveyed control points
Focus on max point density for small feature IDData often adjusted to control established by level loop for
high accuracy grading

Mobile LiDAR
Typical Applications:
Corridor MappingDOTStreet Level VisualizationTransmissionRail Corridors/Tunnels

Mobile LiDAR

Mobile LiDAR

Mobile LiDAR

Questions?