LIDAR and Ci Compressive Sensingpeople.ee.duke.edu/~lcarin/brown.pdf · • Provide an introductory...
13
LIDAR and C i LIDAR and C i Compressive Sensing Compressive Sensing Myron Z. Brown 26 February 2009 Myron Z. Brown 26 February 2009 Compressive Sensing Workshop Work performed under contract to NGA by M.Z. Brown; NGA Contract: HM1582-0-R-0004 Compressive Sensing Workshop Work performed under contract to NGA by M.Z. Brown; NGA Contract: HM1582-0-R-0004 1 Approved for Public Release, PA Case 09-147B Approved for Public Release, PA Case 09-147B
Transcript of LIDAR and Ci Compressive Sensingpeople.ee.duke.edu/~lcarin/brown.pdf · • Provide an introductory...

LIDAR and C i LIDAR and C i Compressive SensingCompressive Sensinggg
Myron Z. Brown26 February 2009Myron Z. Brown26 February 2009Compressive Sensing WorkshopWork performed under contract to NGA by
M.Z. Brown; NGA Contract: HM1582-0-R-0004
Compressive Sensing WorkshopWork performed under contract to NGA by
M.Z. Brown; NGA Contract: HM1582-0-R-0004
1
Approved for Public Release, PA Case 09-147BApproved for Public Release, PA Case 09-147B

Outline• Provide an introductory discussion of LIDAR
– LIDAR 101Key capabilities– Key capabilities
– Geiger-mode detectors and unique challenges
• Discuss objectives and challenges
• Solicit ideas from Compressive Sensing community
2
Approved for Public Release, PA Case 09-147B

LIDAR• Principle of LIDAR
– A laser (pulse or continuous wave) is fired from a transmitter and reflected energy is captured (see illustration below)
– Used to measure distance, velocity, chemical composition, etc.
• Nomenclature– “LIDAR” – light detection and ranging– “LADAR” – laser detection and ranging
“L d ”– “Laser radar”– These terms are almost always used interchangeably
Transmitter
Receiver
Reflector
TL = Time of travel
3
Approved for Public Release, PA Case 09-147B

Range and Intensity ProductsLIDAR Range Reveals 3D Structure
4
Approved for Public Release, PA Case 09-147B
LIDAR Intensity Supports Image InterpretationData from Optech Lynx system

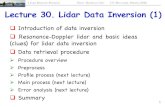
Can collect multiple
Multiple ReturnsCan collect multiple returns per pulse along z-axis within the beam width (footprint)
Light Pulse
width (footprint)first return
2nd return
3rd return
First Returns
Point C
lo
Last Returns
last returnoud
5
Approved for Public Release, PA Case 09-147B

Multiple Looks with Gimbaled LIDARElkhorn Lake, Single Pass, No Gimbal, 66k points
6
Approved for Public Release, PA Case 09-147B
Single Pass w/Gimbal, 461k pointsData from NGA ILAP system

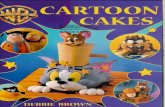
F li R lFoliage RemovalBefore Foliage Removal
GSMingo Knob, WV – 0.5m GSD
7
Approved for Public Release, PA Case 09-147B
“Bare Earth” reveals roads, trails, etc.Data from NGA ILAP system

Vertical ObstructionsLIDAR Point Cloud
8
Approved for Public Release, PA Case 09-147B
Vertical Features Extracted from LIDARData from Optech Lynx system

Geiger-mode Detectors• A linear-mode avalanche photo-diode (APD) is a photodetector that is biased at p ( ) p
close-to but below the breakdown voltage of the semiconductor, so a single photon in is multiplied to produce at most a few hundred electrons.
• A Geiger-mode APD (GmAPD), also called a Single Photon Avalanche Diode (SPAD) operates at a bias voltage above breakdown so a single photon in sets off(SPAD), operates at a bias voltage above breakdown, so a single photon in sets off an avalanche, triggering the timing register.
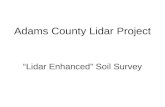
• GmAPD LIDAR data can include points due to Range Histogram
pdark current and background light as well as surfaces of interest.
• Range histogram is built up over many pulsesSignal
End of GateEarly Fires
ange
Bin
• Range histogram is built up over many pulses.– Each pulse contributes either (1) a “1” to a
single range bin or (2) a null result.
Signal
BackgroundCou
nts
Per
R
9
Approved for Public Release, PA Case 09-147B
• Photon counting methods are employed to determine which points to retain.Range Bin (Cropped Near Peak)

GmAPD Benefits and Challenges• Benefits
– Highly sensitive detectors support lower power, longer ranges– Multiple-pixel APD arrays support increased area rates ofMultiple pixel APD arrays support increased area rates of
coverage
Ch ll• Challenges– Additional processing (and time) required to remove noise– Greater amount of raw data collected for GmAPD compared to
conventional LIDAR– Noise in raw data poses additional challenges for compression
10
Approved for Public Release, PA Case 09-147B

Objectives and Challenges
• Explore methods to efficiently manage large volumes of data– Processing– Exploitation / visualizationp– Dissemination / storage
• Retain fidelity of datasetsRetain fidelity of datasets
11
Approved for Public Release, PA Case 09-147B

ConclusionsLIDAR id k bili i• LIDAR provides key capabilities– 3D structure– Intensity information– Foliage penetrationFoliage penetration– Bare earth and vertical obstruction extraction
• Geiger-mode detectors present unique benefits and challenges– Lower power, longer ranges, increased area rates of coverage
compared to linear mode sensors– More data, noisier data
• Goals– Investigate methods to efficiently manage large volumes of data– Retain fidelity of data
12
Approved for Public Release, PA Case 09-147B

www.nga.mil
13
Approved for Public Release, PA Case 09-147B