lewi cns06.ppt
29
Real-time optimization of neurophysiology experiments Jeremy Lewi 1 , Robert Butera 1 , Liam Paninski 2 1 Department of Bioengineering, Georgia Institute of Technology, 2. Department of Statistics, Columbia University
Transcript of lewi cns06.ppt

Real-time optimization of neurophysiology experiments
Jeremy Lewi1, Robert Butera1, Liam Paninski2
1 Department of Bioengineering, Georgia Institute of Technology, 2. Department of Statistics, Columbia University

Neural Encoding
The neural code: what is P(response | stimulus)
Main Question: how to estimate P(r|x) from (sparse) experimental data?

Curse of dimensionalityBoth stimuli and responses can be very high-dimensional
Stimuli:• Images• Sounds• Time -varying behavior
Responses:• observations from single or multiple simultaneously recorded
point processes

All experiments are not equally informative
Possible p(r|x)
possible p(r|x) after experiment A
Goal: Constrain set of possible systems as much as possible
How: Maximize mutual information I({experiment};{possible systems})
Possible p(r|x)
possible p(r|x) after experiment B

Adaptive optimal design of experiments
Assume:• parametric model p(r|x,θ) of responses r on stimulus x• prior distribution p(θ) on finite-dimensional parameter space
Goal: estimate θ from data
Usual approach: draw stimuli i.i.d. from fixed p(x)
Adaptive approach: choose p(x) on each trial to maximize I(θ;{r,x})

Theory: info. max is better1. Info. max. is in general more efficient and never worse than
random sampling [Paninski 2005]
2. Gaussian approximations are asymptotically accurate

Computational challenges
),|(),|(
),|(log),|(),|()|;(
11
11
tttt
ttttt
r
tttxrpp
xrpxrppxrI
rxrx
3. Computations need to be performed quickly: 10ms – 1 sec• Speed limits the number of trials
1. Updating the posterior: p(θ|x,r)
• Difficult to represent/manipulation high dimensional posteriors
2. Maximizing the mutual information I(r;θ|x)
• High dimensional integration
• High dimensional optimization

Solution Overview
1. Model responses using a 1-d GLM• Computationally tractable
2. Approximate posterior as Gaussian • easy to work with even in high-d
3. Reduce optimization of mutual information to a 1-d problem

Neural Model: GLM
tcoefficienhistoryspike
tcoefficienfilterstimulus
ttimeatratefiring
ilocationandttimeatstimulus
)exp()(
,
1,
j
i
t
ti
i
t
jjtjtiitt
a
k
r
x
raxkrEa
We model a neuron using a general linear model whose output is the expected firing rate.
The nonlinear stage is the exponential function; also ensures the log likelihood is a concave function of θ.

GLMComputationally tractable
1. log likelihood is concave
2. log likelihood is 1-dimensional
)()exp(),|(log
)exp(
)(),|(
,
tt
itii
xrxxrp
xk
poissonxrp

Updating the Posterior1. Approximate the posterior, as Gaussian.
• Posterior is product of log concave functions
• Posterior distribution is asymptotically Gaussian
2. Use a Laplace approximation to determine the parameters of the Gaussian, μt , Ct.
• μt = peak of posterior
• Ct – negative of the inverse hessian evaluated at the peak
),|( tt rxp

Updating the Posterior3. Update is rank 1
4. Find the peak: Newton’s method in 1-d
5. Invert the Hessian: use the Woodbury Lemma: O(d2) time
+ =
log prior log likelihood log posterior

Choosing the optimal stimulus• Maximize the mutual information Minimize the posterior entropy• Posterior is Gaussian:
• Compute the expected determinant– Simplify using matrix perturbation theory
• Result: Maximize an expression for the expected fisher information
• Maximization Strategy– Impose a power constraint on the stimulus– Perform an eigendecomposition– Simplify using lagrange multipliers– Find solution by performing a 1-d numerical optimization
• Bottleneck: Eigendecomposition – takes O(d2) in practice
||ln CEntropy

Running Time1. Updating the
posterior O(d2)
d- dimensionality
2. Eigen decomposition
O(d2)
3. Choosing the stimulus
O(d)

Simulation SetupCompare: Random vs.
Information maximizing stimuli
Objective: learn parameters

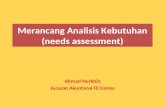
A Gabor Receptive Field
• high dimensional• Info. Max converges to true receptive field• Converges faster than random• 25x33

Non-stationary parameters
• Biological systems are non-stationary– Degradation of the preparation
– Fatigue
– Attentive state
• Use a Kalman filter type approach
• Model slow changes using diffusion
),0(1 QNtt

Non-stationary parameters
• θi follow Gaussian curve whose center moves randomly over time

• Assuming θ is constant overestimates certainty poor choices for optimal stimuli
Non-stationary parameters

Conclusions
1. Efficient implementation achievable with:1. Model based approximations
• Model is specific but reasonable
2. Gaussian approximation of the posterior• Justified by the theory
3. Reduction of the optimization to a 1-d problem
2. Assumptions are weaker than typically required for system identification in high dimensions
3. Efficiency could permit system identification in previously intractable systems

References1. A. Watson, et al., Perception and Psychophysics 33, 113 (1983).2. M. Berry, et al., J. Neurosci. 18 2200(1998)3. L. Paninski, Neural Computation 17, 1480 (2005).4. P. McCullagh, et al., Generalized linear models (Chapman and Hall, London, 1989).5. L. Paninski, Network: Computation in Neural Systems 15, 243 (2004).6. E. Simoncelli, et al., The Cognitive Neurosciences, M. Gazzaniga, ed. (MIT Press,
2004), third edn.7. M. Gu, et al., SIAM Journal on Matrix Analysis and Applications 15, 1266 (1994).8. E. Chichilnisky, Network: Computation in Neural Systems 12, 199 (2001).9. F. Theunissen, et al., Network: Computation in Neural Systems 12, 289 (2001).10. L. Paninski, et al., Journal of Neuroscience 24, 8551 (2004)

AcknowledgementsThis work was supported by the Department of Energy Computational
Science Graduate Fellowship Program of the Office of Science and National Nuclear Security Administration in the Department of Energy under contract DE-FG02-97ER25308 and by the NSF IGERT Program in Hybrid Neural Microsystems at Georgia Tech via grant number DGE-0333411.

Spike history
i
t
jjtjtiitt
a
raxkrE1
, )exp()(
posterior mean after 500 trials
stimulus filter spike history filter

Previous Work
System Identification1. Minimize variance of parameter estimate
• Deciding among a menu of experiments which to conduct [Flaherty 05]
2. Maximize divergence of predicted responses for competing models [Dunlop06]
Optimal Encoding1. Maximize the mutual information input and output [Machens 02]2. Maximize response
• hill-climbing to find stimulus to which V1 neurons in monkey respond strongly [Foldiak01]
• Efficient stimuli for cat auditory cortex [Nelken01]3. Minimize stimulus reconstruction error [Edin04]

Derivation of Choosing the Stimulus I
111
11
1|1
1111
11
)),((
]det[log2
1),|(
),|(),|(),,|;(
),,|;(maxarg
11
1
ttobstt
txrtt
tttttttt
ttttx
xrJCC
constCErxH
rxHrxHrxxrI
rxxrI
tt
t
We choose the stimulus by maximizing the conditional mutual information between the response and θ.
Neglecting higher order terms, we just need to maximize:

Derivation of Choosing the Stimulus II
tobsttttobst CJCCxrJC
111
1 )),((
)(][
]|log~]|log
tobstobsr
tobsrtobsttr
CJoCJtrE
CJIECJCCE
So we just need to minimize
Therefore we need to maximize
11111 )2
1exp()exp()]([
ninformatiofisher Expected)(
)]([][
tttttt
ttt
tt
tobsr
xCxxCxxJtrE
J
JtrECJtrE

Maximization
i
iii
iii
iit ycycyuxF 221 )
2
1exp()exp()(
We maximize the above subject to a power constraint by breaking it up into an inner and outer problem.
])2
1exp(maxarg[)exp(maxarg)(maxarg 22
,||:||1
21 iii
iii
buyeyybt
X
ycycbXFt
t
To maximize this expression, we express everything in terms of the eigenvectors of Ct..
are the projection of the mean and stimulus onto the eigenvectors.
yu
,
111111 )2
1exp()exp()()]([ tt
tttt
ttt
ttt xCxxCxxxFJtrE

Maximization II
We maximize the inner problem using lagrange multipliers:
)(2||||)(maxarg
121
2
,||:|| 2
i
ii
iii
buyeyy c
u
y
eyyc
t
To find the global maximum we perform a 1-d search over λ1 , for each λ1 we compute F(y(λ1)) and then choose the
stimulus which maximizes F(y(λ1))

Posterior Update: Math
t
t
t
t
t
t
t
t
ttt r
x
r
x
r
xCC
111
11
1 )exp(
t
t
t
t
t
tt
t
t
ttt
tt
t
t
tt
t
t
ttt
ttt
r
x
r
xr
r
xC
d
xrpd
r
xr
r
xC
t
t
111
11
111
11
)exp()(),|(log
)exp()()(2
1maxarg
1
1