Lesson plans teaching through robotics.pdf
63
A SET OF LESSON PLANS OF TECHNOLOGY, INFORMATION TECHNOLOGY, PHYSICS, MATHEMATICS and ENGLISH with the use of LEGO MINDSTORMS EV3 sets concerning using robots in building industry and environment protection. Technnology LESSON 1 Topic: Simple machines - application, using LEGO Mindstorms EV 3 bricks, familiarization with the Lego set. Main aim: - getting to know principles of operation of simple machines, their construction and use - familiarization with LEGO Mindstorms EV 3 set Operational aims: -presentation of simple machines, explanation what they are, their structure and operation -getting familiar with the content and basic functions of LEGO Mindstorms EV 3 set Duration: 45 minutes. Stages of the lesson: 1. Introductory part, checking the attendance list, introduction to the topic – about 5 min. 2. Presentation of the simple machines, class discussion - about 20 min. 3. Familiarization with LEGO Mindstorms EV 3 set - about 15 min. 4. Summary, collecting sets - about 5 min. Materials: Interactive whiteboard, presentation titled: ‘Simple machines’, LEGO Mindstorms EV 3 sets.
Transcript of Lesson plans teaching through robotics.pdf

A SET OF LESSON PLANS OF TECHNOLOGY, INFORMATION TECHNOLOGY,
PHYSICS, MATHEMATICS and ENGLISH with the use of LEGO MINDSTORMS
EV3 sets concerning using robots in building industry and environment
protection.
Technnology
LESSON 1
Topic: Simple machines - application, using LEGO Mindstorms EV 3 bricks,
familiarization with the Lego set.
Main aim:
- getting to know principles of operation of simple machines, their construction and
use
- familiarization with LEGO Mindstorms EV 3 set
Operational aims:
-presentation of simple machines, explanation what they are, their structure and
operation
-getting familiar with the content and basic functions of LEGO Mindstorms EV 3 set
Duration: 45 minutes.
Stages of the lesson:
1. Introductory part, checking the attendance list, introduction to the topic – about 5
min.
2. Presentation of the simple machines, class discussion - about 20 min.
3. Familiarization with LEGO Mindstorms EV 3 set - about 15 min.
4. Summary, collecting sets - about 5 min.
Materials:
Interactive whiteboard, presentation titled: ‘Simple machines’, LEGO Mindstorms EV
3 sets.

LEKCJA 2
Temat – Budowa robota na podstawie instrukcji.
Cel główny
- zbudowanie robota z zestawu EV 3 na podstawie instrukcji.
Cele operacyjne
- wykorzystanie klocków z zestawu LEGO MINDSTORM EV 3 do budowy robota ma
podstawie instrukcji.
Czsa trwania 45 minut
Przebieg zajęć;
1. Część wstępna sprawdzenie obecności, podanie tematu. 5 min.
2. Budowa robota na podstawie instrukcji. (praca w grupach 2-3 osobowych). 35
min.
3. Część końcowa, podsumowanie, zebranie zestawów. 5 min.
Materiały.
Zestawy LEGO MINDSTORM EV 3, instrukcje budowy, tablica interaktywna.
LEKCJA 3/ 4
Temat – Programowanie robota za pomocą kostki EV 3, zasady działania
dodatkowych sensorów .
Cel główny.
Programowanie robota za pomocą programu EV 3 w kostce, wykorzystanie
sensorów.
Cele szczegółowe.
- programowanie robota z instrukcji i według własnych pomysłów za pomocą kostki
EV 3
- montowanie sensorów i ich programowanie z wykorzystaniem kostki EV 3
-Czas trwania 90 minut.
Przebieg zajęć.
1. Część wstępna sprawdzenie obecności, temat zajęć wprowadzenie. 5 min. X
2
2. Zapoznanie się z programem zawartym w kostce EV 3, wykonanie zadań z
instrukcji, kompozycje własne (testowanie na robocie). 20 min.
3. Zapoznanie się z dodatkowymi sensorami (dotyku, koloru, ruchu, żyroskopu),
połączenie do robota zgodnie z instrukcją. 30 min.
4. Programowanie kostką na podstawie instrukcji, kompozycje własne
(testowanie na robocie). 20 min.
5. Część końcowa podsumowanie, zebranie zestawów. 5 min. X 2
Materiały.
Zestawy LEGO MINDSTORM EV 3, instrukcje budowy, tablica interaktywna.
LEKCJA 5
Temat - ,,Lego digital desingers”
Cel główny.
- umiejętność korzystania z programu LDD
Cele operacyjne
- Poznanie programu LDD
- budowanie kompozycji z klocków za pomocą programu LDD
Przebieg zajęć.
1. Część wstępna, sprawdzenie obecności, temat zajęć. 5. Min.
2. Program LDD (działanie i podstawowe funkcje i możliwości, zapisywanie
projektów). 20 min.
3. Tworzenie kompozycji z użyciem programu LDD. 15. Min
4. Część końcowa, podsumowanie. 5 min.
Materiały.
Komputery, tablica interaktywna.
LEKCJA 6/7/8/9
Temat - ,, Budowa robota według własnego pomysłu”
Cel główny.
- Budowa działającego robota według własnego pomysłu z użyciem
elementów zestawu LEGO MINDSTORM EV 3 zapisanie projektu z użyciem
programu LDD.
Cele operacyjne.

- stworzenie opisu i projektu własnego robota
- wykorzystanie elementów zestawu ( klocki, sensory, dodatkowe elementy) do
stworzenia własnej kompozycji i zapisanie projektu przy użyciu programu LDD.
Przebieg zajęć.
1. Część wstępna sprawdzenie obecności, temat zajęć. 5 min. X 4
2. Własny projekt robota (ogólne założenia, działanie i wykorzystanie). 15 min
3. Budowa robota. 55 min.
4. Testowanie robota. 15 min.
5. Zapis projektu z użyciem LDD. 55 min.
6. Część końcowa, podsumowanie. 5 min. X 4
Materiały.
Zestawy LEGO MINDSTORM EV 3, komputery
Information Technology
Curriculum:
Solving problems and making decisions with the use of a computer, using algorithmic
approach. Using computer and programs and educational games to increase
knowledge and skills in various fields of knowledge.
Theoretical computer science
Aims:
Overview of the basic concepts of information technology.
Solving practical problems from various subjects by using a computer and
algorithmic approach.
Implementation of projects using different programs.
Showing the social, ethical and economic aspects of development of
Information Technology and assessment of risks and limits.
Allowing pursue of our own interests.
Lesson 1:
Topic: A theory of algorithm.
Elementary educational skills:
Student:
knows the notion of algorithm and instruction;

knows the types of algorithms; creates a simple linear and conditional algorithms; is able to describe the algorithm verbally, with the list of steps and a
flowchart; knows the types of rectangles to present the algorithm using the
flowchart is able to present the algorithm in the form of words; gives examples of algorithms in the form of a list of steps; gives examples of algorithms in block diagram form; creates flowcharts.
Secondary educational skills: Student:
gives examples of algorithmic problem solving; creates complex conditional algorithms; gives examples of recursive algorithms; explains what iteration in the algorithm is; knows the important rules when creating flowcharts.
Task
Find words: algorithm, instruction, flowchart, list of steps, verbal description, rectangle
Task
Write the algorithm in the form of a list of steps and a flowchart for the Pilgrim moving forward in a straight line for 2 seconds. Use the MS Word to complete the task and save it on your desktop as Pilgrim.doc

List of steps
1. Starting the Pilgrim.
2. Immediate starting
of the left and right
engine for 2 seconds.
Krok 3. The Pilgrim
stops working.
Flowchart LEGO programming language
start block
Move steering corresponds for moving the robot forward with the use of two engines. You must select one of three modes:
On for Seconds,
On for Degrees,
On for Rotations, direction of movement, the power of motors.
Task
Give the examples of using the Pilgrim with the use of:
a) linear algorithm, b) conditional algorithm, c) iteration:
when the number of repetitions is predetermined,
when the instruction is repeated until the condition is met,
when the condition is checked first, and only meeting it allows execution of the instructions.
Lesson 2:
Topic: Algorithmic problem solving in a spreadsheet.
Elementary educational skills:
Student:
knows the notion of an algorithm;
lists the types of algorithms;
explains the difference between a linear algorithm and a conditional
algorithm;
uses algorithmic approach to solve various problems;
knows how to use a spreadsheet to solve algorithmic problem.
Secondary educational skills: Student:
Move forward for 2 sec
START
STOP

umie podać przykłady algorytmów, w których w zależności od warunku można otrzymać różne rozwiązania;
podaje rozwiązania różnych algorytmów warunkowych. is able to give examples of algorithms with the use of which various
solutions, depending on the condition applied, can be received; gives the solutions of different conditional algorithms.
Task
Write the algorithm in the form of a list of steps showing the movement of the Pilgrim around the perimeter of a square, a single side being 65 cm. Using the spreadsheet, calculate the distance of the robot in meters doing 1, 2 ... 10 laps. Name the sheet "road". Save the spreadsheet on your desktop as "pilgrim.xls"
lap side a [cm]
side a [m]
distance travelled [m]
1
2
3
4
5
6
7
8
9
10
Task
Write the algorithm in the form of a list of steps for the Pilgrim's way from home to school according to the following figure (scale 1: 100). Using the spreadsheet, calculate the way from home to school in meters, including the condition that the input data is not zero. Name the spreadsheet "home".

Task
Design a spreadsheet table. Use the data from the Physics lesson. Enter the appropriate formula for calculating velocity, checking the condition of "not divide by 0". Save the spreadsheet as "speed".
DISTANCE
[cm]
TIME [s] VELOCITY
[cm/s]
TIME [s] VELOCITY
[cm/s[
Notes
Draw a linear graph of distance against the time for the Pilgrim.
Lesson 3:
Topic: Creating algorithms with the use of LEGO MINDSTORMS and analyzing
its actions.
Elementary educational skills:
Student:
knows how to run the program and how the program's window looks like; knows the basic building blocks to build algorithms in the program; knows how to create simple algorithms in the program; is able to enter instructions for the individual blocks; knows how to run the algorithm that was built into the program.
Secondary educational skills:
Student:
creates algorithms, runs them and checks if they work normally;
makes some adjustments and saves created algorithms;
knows how to use the help section of the program.
The Function Blocks is a set of software blocks used for programming. It consists of
six tabs. Each of them consist of different type of blocks.
Action blocks – the action blocks control the actions of the program. They
control motor rotations and also image, sound and the light on the EV3 P-
brick.).
Flow bricks – The Flow blocks control the flow of the program. All programs
you create will start with the start block.
Sensor blocks – the Sensor blocks allows your program to read the inputs
from the Color sensor, IR sensor, Touch sensor and much more..

Data operation blocks – The Data operations blocks lets you write and read
variables, compare values and much more.
Advanced blocks – The advanced blocks lets you manage files,
Bluetooth connections and much more.
User's own blocks – blocks created by the user.
Each block has a similar construction. It consists of:
1. port selection,
2. action mode,
3. The input signal
4. The output signals.
Task
Program the Pilgrim so it moves forward in a straight line for two seconds.
Task Program the Pilgrim using LEGO MINDSTORMS so it moves from home to school (figure). Use the worksheet "home". Measure the distance [cm] and time [s] and calculate the speed [cm / s] of the Pilgrim. Complete the "velocity" part of the table.
Lesson 4:
Topic: Creating user's own procedures.
Elementary educational skills:
Student:
knows how to create his own procedures;
defines what user's own procedure consists of;
defines user's own procedures;
is able to induce a defined procedure.
Secondary educational skills:
Student:
knows how to define the procedure in the editor;
1
2 3 4

Move forward
Turn
Move forward
START
STOP
is able to define user's complex procedures; knows what causes a change in the dialog mode to defining procedures
mode.
Task
Program the Pilgrim so it moves from line to line and turns about in the meantime.
In order to make the Pilgrim turn about in the spot we need to:
• set the direction of the left engine backwards,
• set the direction of the right engine forward,
• maintain the speed for both engines.
Algorithm (flowchart)
List of steps
1. Start the Pilgrim.
2. Instant start of the left and right
engine for determined time /
rotations.
3. Turn about – turning in the spot.
4. Instant start of the left and right
engine for determined time /
rotations.
5. Stop the Pilgrim.

1. 2. 3. 4. 5.
Lesson 5:
Topic: Creating procedures with a parameter.
Elementary educational skills:
Student:
knows what the creation of procedures with the parameter is;
creates a simple procedures with his own parameter.
Secondary educational skills:
Student:
creates complex procedures with his own parameter.
Task
Program the Pilgrim so it moves around the perimeter of a square, single side being 65 cm.
Task
Program the Pilgrim so it moves around the equilateral triangle.
Task
Program the Pilgrim so it moves around a regular hexagon.
Lesson 6:
Topic: Sorting algorithms of the sets of elements
Elementary educational skills:
Student:
knows the notions of: sort by choice, merge sort, insertion sort,
bubble sort;
knows what the sorting is about;
explains giving specific examples what is searching for items in the
ordered sets and not-ordered sets.
Secondary educational skills:
Student:
explains each of the ways of sorting: by choice, by merging, by inserting, by bubble sorting;
knows how to organize the set of items in various ways.
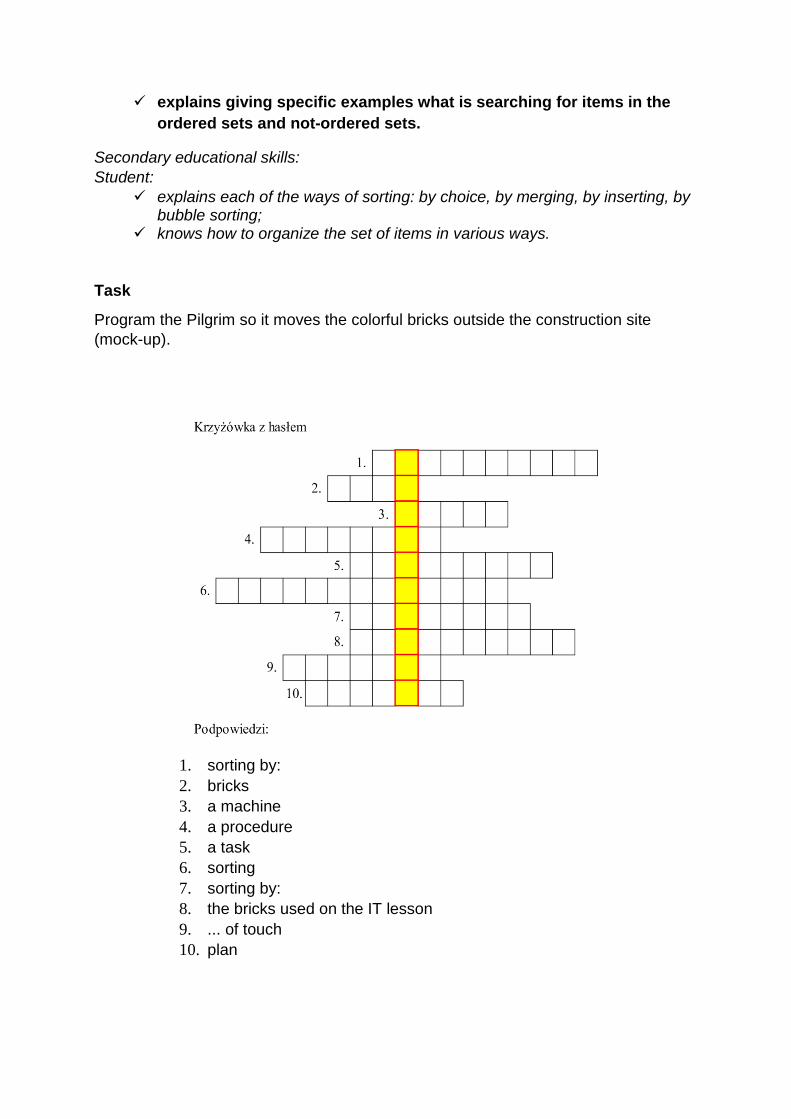
Task
Program the Pilgrim so it moves the colorful bricks outside the construction site
(mock-up).
1. sorting by:
2. bricks
3. a machine
4. a procedure
5. a task
6. sorting
7. sorting by:
8. the bricks used on the IT lesson
9. ... of touch
10. plan

Mathematics Topic: Algebra, Linear functions
I. Three (3) robots, (The “Math Expert”, The “Math Warrior” and the “Math
Max”), all based on Educator Robot model.
Main Aim
Build three (3) similar robots, to be used as teaching aids in Mathematics.
Operational Aims:
Construct 3 similar robots, based on Educator Robot model, using 3 Lego Mindstorms Education EV3 set (basic set). The 3 motors will be constructed based on Educator Robot model with slight adaptations on each robot, that will differentiate from the others e.g. adding weight, using different wheels etc.
Program the robots actions using EV3 Education Programming software
Learn about EV3 Mindstorms Data Logging
Learn about readings
Make practical use of the robots and its sensors (color sensor)
Course Duration: 120 minutes
Didactic aids / visual aids:
Three (3) sets of LEGO MINDSTORMS Education EV3, EV3 Education Programming software, PC/laptops, interactive whiteboard, strip, graph paper, paper, measuring tape, pens.
Course Stages
I. Introduction
Duration: 10 minutes
Aims:
Discussion of basic health and safety rules
Getting to know the content of LEGO MINDSTORMS Education EV3 set
Inform the students about the course Tasks

II. Discussion about the robots required movements and basic parts
Duration: 15 minutes
The teacher explains the students the robots various parts and how the robot works.
III. Building the Robots
Duration: 40 minutes
Aim:
In three (3) groups of 3-4 students each, build three (3) working / functional Educator robots with Lego Mindstorms Education EV3 bricks.
Construct the robots using a Lego User Guide prepared by the class professor. The User Guide is displayed on computer screen and interactive whiteboard. Each robot will be based on Educator Robot model but with slight adaptations that will differentiate each robot e.g. one team can make its robot heavier by adding weight e.g. by adding Lego parts or sensors, one team can use different wheels, one team can program its robot moving backwards etc. By the end of this task, three (3) slightly different robots will be constructed, the “Math Expert”, the “Math Warrior” and the “Math Max”.
IV. Programing the Robots
Duration: 20 minutes
Aims:
Discussion of basic programing blogs (programing commands) in EV3 software.
Control the big motors (2) for linear movement.
Use the EV3 Education Programming software to view Data Logging
Program the robots to handle the different Tasks/Activities as explain in detail in the following pages.

V. Testing the Robots
Duration: 10 minutes
Aims:
Test the robots (robots operation / structure and programing)
Make conclusions and improvements
The students run the robots, make conclusions and take corrective actions / improvements on robot and programming.
VI. Mathematics course
Duration: 40 minutes
Aims:
Learn about whole numbers/decimal numbers lines
Learn how to measure Time and Motion
Learn how to create data tables and graphs
Learn how to plot ordered pairs on coordinate graph
Learn about Algebraic Equations
Task/Activity 1
Summary:
Students will time various robots’ progression at four points on a straight-lined
course.
Content:
Measurement and construction of whole number/decimal number lines
Measurement of time and motion
Creation of data tables and graphs
Plotting ordered pairs on coordinate graph
Algebraic equations
Task/Activity description:
(A) In groups of three to four students, create and label a straight line (made from
strip) that is divided in 5 points as follows:
‘Start, Checkpoint 1, 2, 3, Finish’.
FINISH 3 1
3
2
3
START

(B) Program the robot to reach to the Finish line. As the robot moves along the
straight line, from Start point to Finish point, time the progress of the robot at each
checkpoint i.e. Checkpoint 1, 2, 3 and at the Finish line and record the time the
robot crosses each mark.
(C) Repeat the activity for each robot.
(D) Identify the equation that can be used to calculate times for longer courses.
(E) Repeat the activity with different types of robots and compare the slopes of all the
robots’ times.
Figure 1, Straight Line course Table 1
Robot name _________
Checkpoint 1 Checkpoint 2 Checkpoint 3 Finish
Task/Activity 2
Summary: Students will work in groups of three to four. Each team will time various robots’ progression at four points on a straight-lined course (see figure 1) and will use the
START FINISH 1 2 3

time data to create X/Y tables with equations and a coordinate graph to show and compare slopes. Outline:
Organize the times each robot passed the checkpoints and the finish line in a data table for each robot tested.
Write and use an equation to calculate the times when the robots would cross checkpoints on a longer course.
Use the data table to construct a coordinate graph showing the slopes for each robot timed.
Activity A: A. Organize the time information from each of the robots’ drag race in a data table (see Sample Chart and Data Worksheet). Each group will develop an equation that will be used to calculate times at other checkpoints along the same course as well as along the length of a longer course. Student groups will use a piece of graph paper to create a coordinate graph to plot the slopes for each robot drag race. Students will plot the ordered pairs for each race by using a different color for each robot. Robot name: the “Math Expert” Chart:
X (checkpoints) Equation Y (time in secs) Ordered pair
0 (start)
1
2
3
4 (finish)
Compare the results with the other teams. Did you come up with the same
equation? If not, what factor do you believe was the main one for this result? Activity B: Complete the two different following charts. Use the information given to figure out the missing gaps: (Create and use an algebraic equation to make probable predictions). Robot name: the “Math Warrior” Chart:
X checkpoints Equation _________
Y (seconds) Ordered pair
1 3.5 (1, 3.5)
2 (2, ___)
3 10.5 (3, 10.5)
4 (finish) (__ , __)

Robot name: the “Math Max” Chart:
X checkpoints Equation _________
Y (seconds) Ordered pair
1 (___, __ )
2 8 (2, 8)
3 (3, ___ )
4 (finish) (__ , __ )
Which robot won the race? ___________ How much faster did he run the course? ___________ If the course was twice as long, what would be the finishing times for:
the “Math Warrior” __________ , the “Math Max” _______________ Create a coordinate graph on a piece of graph paper to show slopes for the
“Math Warrior” and , the “Math Max”. Use different colors for the 2 slopes. Physics Topic: Light
I. “The Light Identifier”, a robot based on Educator Robot model
Main Aim
Build a robot that is capable of identifying colors.
Operational Aims:
Construct a robot (Educator Robot) using the Lego Mindstorms Education EV3 set (basic set)
Program the robots actions using EV3 Education Programming software
Learn about EV3 Mindstorms Data Logging
Learn about readings
Make practical use of the robot and its sensors (color sensor)
Course Duration: 120 minutes
Didactic aids / visual aids:
One Set of LEGO MINDSTORMS Education EV3, EV3 Education Programming software, PC/laptop, interactive whiteboard, colored papers (red, green, blue, white, black, grey), measuring tape, pens, paper.
Course Stages
I. Introduction
Duration: 10 minutes
Aims:
Discussion of basic health and safety rules
Getting to know the content of LEGO MINDSTORMS Education EV3 set
Inform the students about the course Tasks
II. Discussion about the robots required movements and basic parts
Duration: 15 minutes
The teacher explains the students the robots various parts and how the robot works.
III. Building the Educator Robot
Duration: 40 minutes
Aim:
Build a working / functional Educator Robot model with Lego Mindstorms Education EV3 bricks.
Construct the Educator Robot using a Lego User Guide prepared by the class professor. The User Guide is displayed on computer screen and interactive whiteboard.
IV. Programming the Educator Robot
Duration: 20 minutes
Aims:
Discussion of basic programing blogs (programing commands) in EV3 software.
Control the big motors (2) for linear movement.

Use the color sensor to identify different colored surfaces (to distinguish between various colors, to read black and white lines, Light and Dark colors readings, high and low color sensor readings)
Use the EV3 Education Programming software view Data Logging
Program the robot to move in a straight line, from the starting point to the finish point (the robot will cover a distance of 10 meters). As the robot moves in a straight line its color sensor will reads various colors, and record all reading values. All reading values are viewable in Data Logging. Repeat the activity using different colors placed on robots path, and compare the color readings.
V. Testing the Educator Robot
Duration: 10 minutes
Aims:
Test the robot (robot operation / structure and programing)
Make conclusions and improvements
The students run the robot, make conclusions and take corrective actions / improvements on robot and programming.
VI. Physics course
Duration: 40 minutes
Aims:
Learn about Light Intensity, Color Spectrum, of basic health and safety rules
Learn how to read values in EV3 Mindstorms Data Logging
Task1
A. Make your prediction for the black and white lines on the graph using data
logging. Label each line clearly. Why and how did you decide?
___________________________________________________________________
___________________________________________________________________

B. Based on the black and white sensor values, what kinds of colors do you think will
produce high color sensor readings in general? Lighter or darker?
Task 2
A. Add lines to the graph below, showing what you think the lines for the colors red,
blue, green and grey will look like. How did you decide? why?
___________________________________________________________________
___________________________________________________________________
0
20
40
60
80
100
0 0,5 1 1,5 2 2,5 3
PREDICTION OF THE COLOR SENSOR’S READINGS

B. Now, measure the actual readings of the color sensor and state it in the table.
Color Reading
Red
Blue
Green
Grey
Black
White
Task 3
A. What’s the difference between color and hue / shade ?
___________________________________________________________________
___________________________________________________________________
B. Why is it important to choose shades of the same color for this comparison?
Because in order to make a “fair comparison”, you needed to eliminate as many other
0
20
40
60
80
100
0 0,5 1 1,5 2 2,5 3
PREDICTION OF THE COLOR SENSOR’S READINGS

possible factors as possible. This is directly related to the “fair test” concept, where
external factors which bias the comparison need to be eliminated or controlled as
much as possible. If you did not do so, the real reason for the difference would be
unclear – is it the thing you’re examining, or the other unintended difference?
___________________________________________________________________
___________________________________________________________________
Task 4
Suppose the robot runs through a 10m stretch of tube/ cylinder and gives the
following data..
What does each arrow represent? ( the leftmost arrow, rightmost and middle arrow):
___________________________________________________________________
___________________________________________________________________
Why the middle arrow has a lower sensor reading?
___________________________________________________________________
___________________________________________________________________

Cross-curricular
II. Pilgrim/Wanderer 1 - 5X45min., Robot Education
Main aim
To build functioning robot.
Operational aims
Using modern software
Using the robot
Time: 225 minutes
Materials needed:
LEGO MINDSTORMS Education EV3 sets, LEGO MINDSTORMS Education EV3 software, laptops, an interactive board, a black adhesive tape, a measuring tape, dynamometers, toothpicks, plasticine, timers, pens, paper sheets.
Lesson outline
Information Technology
V. Programming
Aims:
Discussing the basic programming blocks
Using the color sensor to program the Wanderer's route along the dark line
Using the touch sensor to program the obstacle course for the robot
Using the infrared sensor to program the Wanderer's route along the wall
Using the loop
We program the robot so it moves along the geometrical route (square, triangle) by following the dark line, moves along the wall, runs the obstacle course, and stops just before the obstacle.
Physics
VI. Using the Pilgrim/Wanderer in practice
Aims:
Revision of physical notions of trajectory, distance, types of trajectories, vector of displacement, velocity, uniform linear motion, Newton's first law of motion.
Improving skills of showing the relationship between the two physical quantities.
Task 1
Fill in:
1. ____________ of movement we call lines which describes a body performing the movement.
2. We call a rectilinear motion which ____________ is______________ line.
3. A motion which trajectory is a curve track is called ________________.
4. The length of the trajectory between two points is called _____________ travelled by the object.
5. Examples of the distance is measured by __________ and __________________.
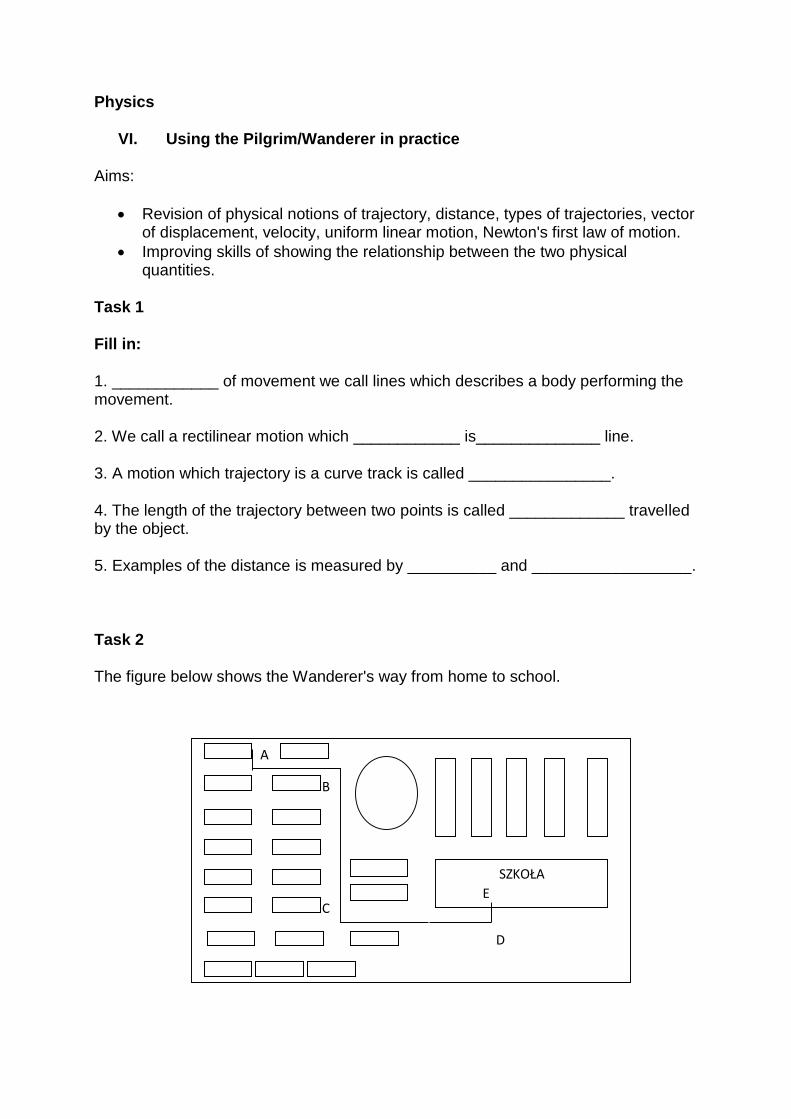
Task 2
The figure below shows the Wanderer's way from home to school.
A
B
C
SZKOŁA
,,,,,,,,,,E
EE D

1. Mark the vector on the figure showing the movement of the Wanderer from home to school.
2. The beginning of displacement vector is at the point ___________.
3. The end of displacement vector is at the point ___________.
4. Calculate the approximate length of the vector displacement. Assume that 1 cm is 100 m.
5. Calculate the distance travelled by the Wanderer from home to school. Assume that 1 cm equals 100 m.
6. Calculate the difference between the way Wanderer travels from home to school and the length of the displacement vector.
7. Describe the displacement vector features.
Task 3
Name trajectories of the Wanderer's movement along a geometrically defined route (square, triangle),following the dark line and along the wall.
Task 4
Plot the graph of relationship between the Pilgrim's time and velocity with the use of a black adhesive tape. Give the answer in m / s.
V(cm/min)
t(min)
Task 5
Plot the graph of relationship between the distance and time of the Pilgrim with the use of a black adhesive tape.
s(cm)
t(min)
Task 5
The Wanderer moves uniformly straight and pulls a colorful block. Name all the forces the robot must struggle with. What can you say about the values of these forces? Plot these forces on the graph.

Task 6
Cross-out puzzle. Find words connected with the motion of the body.
m o t i o n g a m t r
r u l d z f o r c e u
s z k i l o m e t e r
v e l o c i t y r u o
x v u q e s i ł a c i
w e k t o q x u j h m
q m a s d f g h e j k
w o d f g h b n c c l
e t z x c v b n t q m
r i d f v e c t o r n
t o a a f b n a r b b
y n i o p l q w y m v
Words to find:
motion, velocity, kilometer, trajectory, distance, vector, force.
Mathematics
VII. Use the Pilgrim/Wanderer in practice
Aims:
Revision of the mathematical notions of area and circumference of the figure
Improving skills of calculating the velocity, area, and circumference.
Improving the ability of building regular polygons.
Improving the skills of reading data from charts

Task 1
Draw a square, an equilateral triangle and hexagon with a side of 65 cm. Calculate the area and circumference of these figures.
Task 2
Calculate the Wanderer's velocity in centimeters per second when it is moving along the triangular, and square routes; when it runs the course along the black adhesive tape and along the wall, and running the obstacle course, and simultaneously measure the trajectory of this motion with a measuring tape and time with the use of a stopwatch.
Task 3
The graph shows the relationship between the velocity and time of the Pilgrim during 12 minutes of its working.
V(cm/min) 300
50
1 2 t(min)
1. The Pilgrim moved with a speed of ____________________ for 2 minutes.
2. With a ration of 200 cm / min the Pilgrim moved between ______ min to _______min.
3. During the whole operating time the Pilgrim stopped ___________ time(s).
4. The total operating time was _________min.
5. The distance the Pilgrim travelled with the speed of 100 cm / min
is _________cm.

6. The distance traveled by the Pilgrim during 12 minutes is ______________.
7. The Pilgrim, moving with the speed of 300 cm / min, travelled ______ times greater distance than when it was moving with a speed of 150 cm / min.
8. The average velocity of the Pilgrim during the whole operating time is _____ cm / min.
Do necessary calculations.
Task 4
Do the crossword and guess a password.
Questions
1. A rectangle with equal sides.
2. Fractions with the denominator of one hundred.
3. The sum of the lengths of the sides of the polygon.
4. Name a triangle with equal sides.
5. The smallest geometric figure.

6. A mathematician from Greece.
7. The unit of an are used in agriculture.
8. One twenty-fourths of a day.
9. The result of the multiplication.
IV. Final part
• Sum up the students’ work
• Clean up the students’ work place
III. The Pilgrim/Wanderer 2- 5X45 min., Robot Education
Main aim
To build functioning robot.
Operational aims
Using modern software
Using the robot
Time: 225 minutes
Materials needed:
LEGO MINDSTORMS Education EV3 sets, LEGO MINDSTORMS Education EV3 software, laptops, an interactive board, a black adhesive tape, a measuring tape, ergometers, toothpicks, plasticine, timers, pens, paper sheets.
Lesson outline
Information Technology
VIII. Programming
Aims:
Discussing the basic programming blocks
Using the color sensor to program the Wanderer's route along the dark line
Using the touch sensor to program the obstacle course for the robot

Using the loop
We program the robot so it moves along the geometrical route by following the dark line, runs the obstacle course, and stops just before the obstacle.
Physics
IX. Using the Pilgrim/Wanderer in practice
Aim:
Revision of the Physics notions of a motion path, distance, velocity, and the speed of light.
Task 1
Build a running track measuring 2,60 meters for the Pilgrim. Using the circumference formula calculate the radius of the wheel which will be used to draw a circle.
1. Measure the time it took the Pilgrim to travel one lap, and calculate the robot's velocity and impetus.
2. Fill in the table using the data of relationship between the impetus of the Pilgrim and duration.
p(m∙kg/s) 0,4 0,2
t(s) 1 5
t(s) p(m∙kg/s) V(m/s)
0
1
2
5
8
12

3. A voice travels 340 m/s. How long will it take you to hear your friend who is
calling you from the end of the room (the room is 7 meters long)?
Task 2
Build an obstacle course for the Pilgrim. Program it so it travels the course as fast as it can. Measure the distance and time, then calculate the robot's velocity and impetus.
Task 3
Draw a table and plot a solution on a figure covering the relationship between distance the Pilgrim travelled and time it took it to run the obstacle course.
s(cm)
t(min)
Task 4
Draw a table and plot a graph of relationship between velocity and time for the Pilgrim on the obstacle course.
v(cm/min)
t(min)
Task 5
Having in mind that the Pilgrim moves with constant speed of 0,3 m/s, fill in the gaps:
t(s) 0 5 10 15
s(m) 0 9 12
Using the data from the table plot the graph of relationship between the distance and time.
Task 6
Do the crossword with main password.

Questions
1. "t" is its symbol.
2. The feature of movement.
3. The sub-division of Physics dealing with the movement of the bodies.
4. Movement during which a body travels the same distance.
5. The feature of a vector.
6. We use it to measure lenght.
7. How do we call movement of the body along the curved line?
8. This value remains constant in the uniform motion.
9. The lenght of a cource.
10 Decreasing velocity.
11. How do we call movement of the body along the straight line?
12. A body according to which the movement is calculated.
13. A device used to measure the time.
Mathematics
Using the Pilgrim/Wanderer in practice
Aims:
Revision of mathematical concepts of area of a circle, circumference of a circle and area's units
Improving the skills of calculating and calculations of percentages
Task 1
Use a running track measuring 2,60 meters to count:
1. How many laps will a sprinter run for:
a) 100m,
b) 200m,
c) 400m,
d) 800m,
e) 5 km,
f) 10km
2. Calculate the area of a given athletics stadium and an area of a given running
track.

3. Calculate the circumference of the stadium.
4. What percentage of the whole stadium is a running track?
5. How many acres is the athletics stadium area?
6. How many minutes did it take the Pilgrim to run 6.5 kilometers on the 2.60
meter long stadium if it travelled one lap in 12 seconds?
Task 2
Change hours to minutes. Find the answers in the box and fill the gaps in the table with the corresponding letters. Read password.
45 min O 50 min I 75 min D
25 min Ł 20 min U 33 min E
10 min H 30 min R 66 min W
40 min C 15 min T 6 min Z
Hours 1/2
h
1/3
h
2/3
h
1/6
h
0,25
h
0,75
h
0,1
h
1,25
h
0,5
h
3/4
h
1,1
h
5/6
h
0,55
h
Minutes
Letter

Task 3
Cross-out puzzle. Find words that are the names of the length units.
o m t x m k s d a y v g d
w i p m ć i z e c a l ł e
m l l a w l n c r r k o c
m e t e r o u u v d j k i
l e y d e m r b w n a i m
g s j l r e w i l b r e e
n g f e e t g t z x d ć t
d ł o ń t e i n c h h u e
c v q u a r t e r q m o r
Words to find: meter, kilometer, decimeter, cubit, feet, yard, mile, inch, quarter.
IV. Final part
• Sum up the students’ work
• Clean up the students’ work place
IV. The Pilgrim/Wanderer - 5X45 min., Robot Education
Main Aim
To build a working robot.
Operational aims
Using modern software
Using a robot in practice

Duration: 225 minutes
Teaching aids:
the LEGO MINDSTORMS Education EV3 sets and software, laptops, an interactive whiteboard, a black adhesive tape, a measuring tape, dynamometers, toothpicks, plasticine, stopwatches, pens, paper cards.
Lesson plan
Information Technology
X. Programming
Aims:
Discussing the basic programming blocks
Using the color sensor to program the Wanderer’s course so it moves along a
dark line
Using the touch sensor to program the obstacle course for the Wanderer
Using of the software loop.
Program the Wanderer so it moves along the given course along the dark line, and stops in front of the obstacle.
Task 1
Program the Wanderer so it cleans the given plot by removing unnecessary elements
from it (garbage).
Physics
XI. Using the Pilgrim/Wanderer in practice
Aims:
Revision of a notion of the average velocity.
Task 1
Three teams have to perform a clean-up work. The first team would accomplish this
task within 12 days, a second team within 15 days, and the third team in 8 days.
What time would all the teams need to accomplish this task if we assume that they
will work together?
Task 2
Calculate an average velocity of the Pilgrim clearing up the plot.
Mathematics
XII. Using the Pilgrim/Wanderer in practice
Aims:
Revision of the mathematical concepts of geometric figure area and field
quantities, volume of the spatial figures and volume quantities
Improving the skills of doing calculations and calculating the scale
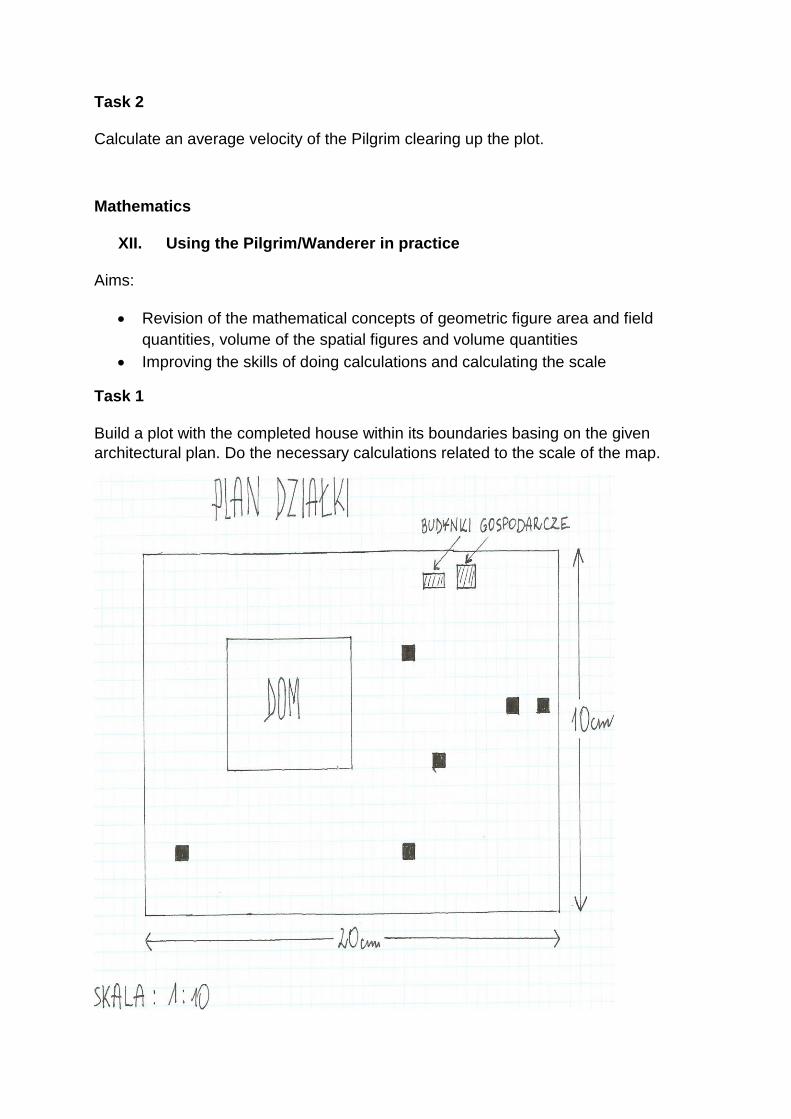
Task 1
Build a plot with the completed house within its boundaries basing on the given
architectural plan. Do the necessary calculations related to the scale of the map.

Task 2
Calculate the area of the built plot and other buildings on this plot. What part of the
area of the whole plot is an area occupied by buildings on this plot?
Task 3
Calculate the cubature of the house on a plot and the outbuildings. The house is 50
cm high. How many cm3 are there per a single person, if there are three people living
there?
Task 4
How many centimeters of the fence is needed to acquire in order to enclose the
entire plot? The main gate is 4cm wide, and two wickets are 1 cm wide each.
Task 5
Delineate a line of the sidewalk and the main entrance to the plot on the mock-up
which are meant to be tiled with square tiles of 1.5 cm each. How many tiles should
you use?
Task 6
How many apple trees can be planted on part of the plot with dimensions of 25cm x
12cm, if one fully-grown apple tree should cover an area of 25cm2 to fruit?
Task 7
1 liter of paint is enough to paint 8m2 of a flat surface. How many liters of paint will be
used to paint a cubic container of 8m3 volume? The container will be painted inside
and outside.
Task 8
There is the same amount of air in the given room like in the cube which edge is 4 m
long. Is it possible for 7 people to stay in that room if it is known that one person
needs 6m3 of air to breathe?

IV. Final part
• Sum up the students’ work
• Clean up the students’ work place
V. The Pilgrim/Wanderer 4 - 5X45 min., Robot Education
Main aim
Building fully functional robot.
Operational aims
Using modern software
Using a robot in practice
Duration time: 225 minutes
Teaching aids:
The LEGO MINDSTORMS Education EV3 sets and software, laptops, interactive whiteboards, tablets, a prism, color filters, a measuring tape, colored blocks, stopwatches, pens, paper sheets.
Lesson plan
Information Technology
XIII. Programming
Aims:
Discussing the basic building blocks
Using a color sensor to sense a particular color of a given block
Using a software loop
Use the tablet to the program the Pilgrim/Wanderer
Task 1
On the mock-up of dimensions of 1,5m x 2m set green, blue and yellow blocks
representing glass, paper and plastic wastes respectively. Program the Pilgrim so it
recognizes the colored blocks and segregates them properly.
Physics
XIV. Using the Pilgrim/Wanderer in practice
Aims:
Revision of physics notions of the average velocity, the refraction of white light
by a prism.
Task 1
Calculate the average velocity of the Pilgrim cleaning up the mock-up.
Task 2
Explain why different objects have different colors?
Task 3
Use the Pilgrim and a prism to refract the white light into other several colors. List
colors you see passing continuously one into the other in the spectrum of white light.
Which color of light is dispersed quicker and which is the slowest?
Task 4
Observe the colored blocks through a red light filter. What have you noticed?
Mathematics
XV. Using the Pilgrim/Wanderer in practice
Aims:
Revision of mathematics notion of a volume of spatial figures and volume
quantity, proportional quantity.
Improving the skills of doing calculations and percentage calculations

Task 1
Brimful skips and garbage containers pose increasing problems with their disposal.
Each of us produces approximately 300 kg of garbage per year. How many 8 ton
cars do we have to use to dispose of annual collection of garbage from our town?
Task 2
Composting the wastes produced in a single household reduces the overall amount
of rubbish. Approximately 1/4 of waste generated in the household and the garden is
compostable. How many kg of waste is composted in the household with a family of
five? What percentage of all wastes from Zawiercie constitute the garbage of this
family? Present the result as exponential notation.
Task 3
In a town, solid waste removal costs 10 zloty per person in case of segregated
wastes, otherwise the amount for removal is 15 zloty per person. There has been a
15% increase of charge for that service in June. How much money will a family of five
pay for removal of waste in both cases? How much money will they save if they
segregate wastes?
Task 4
A garbage bin volume is 2 litres. Calculate how many bins of that type full to the brim
are needed to fill in 75% the tank with a volume of 3m3.
Task 5
In Poland, 530 000 tons of paper waste are used annually. A paper recovery rate is
35%. How many tons of paper are recovered in Poland?
Task 6
In Poland, 12% glass (42 500 tons) is annually recovered from the whole waste glass
amount. How many tons of waste glass are produced in Poland annually?
Task 7
Three piles of garbage weight a total of 26kg. The ratio of their weight is 1: 5: 7. How
much weigh the heaviest?

Task 8
The waste removal company hires 6 men more than women, and for every 4 women
there are 5 more men. How many employees does the company employ?
Task 9
The Pilgrim's task is to sow 1.5 hectare of land in the shape of a rectangle with an
ecologic type of grain. How long will it take it to sow this area? Using a mock-up of
1,5m x 2m make the appropriate measurements and answer the question.
VI. Final part
• Sum up the students’ work
• Clean up the students’ work place
II. Strongman - 5X45 min., GRIPP3R
Main aim
To build working robot.
Operational aims
Use Mindstorms EV 3 blocks to build a robot
Using modern software
Using the robot in practice
Duration: 170 to 225 minutes
Teaching aids needed:
LEGO MINDSTORMS EV3 sets, LEGO MINDSTORMS EV3 software, laptops, an interactive whiteboard, the GREEN-UP fizzy drink, a measuring tape, stopwatches, a kitchen scale, pens, paper sheets.
Lesson plan
XVI. Warm-up 15-20 minutes
Aims:
Discussing the basic safety rules
Getting to know the contents of the LEGO MINDSTORMS EV3 set

XVII. Building the robot 35-45 minutes
Aim:
Building the robot out of Lego Mindstorms EV3 set
The construction of the robot using the instructions that appears on the screens of
the students’ computers and interactive whiteboard.
XVIII. Discussing the robot’s design 10-15 minutes
Teacher discusses with the students the parts of the robot and the rules of working of the built robots
XIX. Programming 20-30 minutes
Aims:
Discussing the basic programming blocks
Using the proximity sensor to program the Amoeba
Using the program loop.
Program the robot so it travels the distance of 100 cm, grab the can of Green-Up fizzy drink, walk to the edge of the table and let the can go.
XX. Using the Strongman in practice 90-115 minutes
Aims:
Revision of the physical notions of a gravity force, work, power, potential
energy, kinetic energy.
Revision of the notion of conservation of energy.
Improving the ability to perform measurements and calculations.
Improving the ability to read information.
Improving the ability to recognize the directly proportional quantities.
Improving the ability of doing calculations.
Physics
Task 1
Perform needed calculations and fill in the gaps in the table.
No. Force F(N) Distance s
(m) Work W(J) Time (s) Power P(W)
1 20 400 50
2 90 2700 60

3 150 10500 120
4 240 60 20
5 15 7500 50
Task 2
Using a kitchen scale calculate the influence of gravity force over the Strongman. Assume the gravitational acceleration is 10 m / s2.
Task 3
What kind of work will the Strongman perform by lifting the can of GREEN-UP drink? Measure the quantities needed with proper instruments.
Task 4
The Strongman moved the can of GREEN-UP drink for 50 cm moving on the flat table. Calculate work the Strongman did.
Task 5
The Strongman’s engine Power is 0,4 W. It marched for 5 minutes. What work was performed by the Strongman’s engine?
Task 6
The Strongman dropped the can of GREEN-UP drink from the edge of the table. What velocity will the can have when it is near the ground? Measure the height of the table with a measuring tape.
Task 7
Calculate the kinetic energy of the Strongman travelling a distance of 100 cm. Use proper instruments to measure specified quantities.

Mathematics
Task 8
The Strongman consumes 248 kcal when marching for 60 minutes. How many cans
of GREEN-UP drink would it have to drink to travel a distance of 100 cm? Show the
relationship between joules and calories. Find the required data on the can.
Final part
Sum up the students’ work
Clean up the students’ work place
III. Amoeba - 5x45 min., R3PTAR
The main objective
To build a working robot.
Main aims
To build a Mindstorms EV3 robot
The use of modern software
Use the robot in practice
Duration time – 170 to 225 minutes
Teaching aids needed:
LEGO MINDSTORMS EV3 sets, LEGO MINDSTORMS EV3 software, laptops, an interactive whiteboard, sheets of graph paper, kitchen scales, measuring tapes, stop watches, pens, plastic cups, pens, cards.
Lesson plan
XXI. Introduction 15-20 minutes
Aims:
Discussing basic safety rules
Learning about the contents of the LEGO MINDSTORMS EV3 set.
XXII. Building a robot 35-45 minutes
Aim:

Building a robot with the use of Lego Mindstorms EV3
Building the robot using the instructions that appear on the screens of students’ computers and interactive whiteboard.
XXIII. Discussing the robot’s design 10-15 minut
Teacher discusses with the students the parts of the robot and the rules of working of the built robots.
XXIV. Programming 20-30 minutes
Aims:
Discussing the basic programming blocks
Using the proximity sensor to program the Amoeba
Using the program loop.
Program the Amoeba so it moves, then when it approaches the obstacle it open its mouth and starts moving slalom.
XXV. Using Amoeba in practice 90-115 minutes
Aims:
Revision of physical notions of balancing forces, gravity force, pressure, results and types of interactions, velocity.
Revision of mathematics notions of an area – unit and concept.
Improving the ability to measure the area by using graph paper.
Improving the ability of ma king calculations and estimating the results.
Physics
Task 1
Using a kitchen scale calculate the influence of gravity force over Amoeba. Assume the gravitational acceleration is 10 m / s2.
Task 2
Calculate the pressure Ameoba exerts on the ground. Estimate the area of the Amoeba’s parts that touch the ground with the use of graph paper.
Task 3
What work will be performed by Amoeba when it will be moving for 2 minutes? Amoeba engine’s power is 0,4W.
Task 4
What is the result of collision of Amoeba with an obstacle? What kind of influence is it?
Task 5
Draw vectors of forces balancing the forces influencing Amoeba. Name those forces and state their sources.
Mathematics
Task 6
Build a slalom for Amoeba. State the starting and stopping point. Measure the time Amoeba needs to finish the slalom, measure the course’s length and measure its velocity.
XXVI. Finish part
Sum up the students’work
Clean up the students’ work place
LESSON PLAN for use EV3 in a simple recycling task
VI. “The Recycler”, a robot based on Educator Robot model
Main aim:
Build a robot that is capable of seperating aluminum cans in a recycling process.
Operational aims:
Construct a model of a robot using the Lego Mindstorms Education EV3 set (basic set)
Program the robots actions using EV3 Education Programming software
Make practical use of the robot and its sensors
Course Duration: 120 to 140 minutes
Didactic aids / visual aids:
One Set of LEGO MINDSTORMS Education EV3, EV3 Education Programming software, aluminum cans, plastic bottles, glass bottles, PC/laptop, interactive whiteboard, measuring tape, pens, paper.
Course Stages
XXVII. Introduction
Duration: 10 minutes
Aims:
Discussion of basic health and safety rules
Getting to know the content of LEGO MINDSTORMS Education EV3 set
Inform the students about the course Tasks
XXVIII. Discussion about the robots required movements and basic parts
Duration: 15 minutes
The teacher explains the students the robots various parts and how the robot works.
XXIX. Building “The Recycler”

Duration: 40 minutes
Aim:
Build a working / functionable model of a robot with Lego Mindstorms Education EV3 bricks
Construct the robot using a Lego User Guide prepared by the class professor. The User Guide is displayed on computer screen and interactive whiteboard.
XXX. Programming “The Recycler”
Duration: 40 minutes
Aims:
Discussion of basic programing blogs (programing commands) in EV3 software.
Control the big motors (2) for linear movement.
Control the small motor (1) for vertical movement.
Use the colour sensor to identify different coloured surfaces, thus to distinguish between various colours, selecting the colours of interest (selecting the aluminum cans) and ignoring the irrelevant colours (ignoring all other cans).
Use the infrared sensor to avoid falling off the platform of to come very close to the waste materials.
Use of EV3 special programming blogs such as SWITCH, LOOP etc.
We program The Recycler in oder to make it move in a straight line, having the waste materials to its right side. The Recycler while moving alongside the waste materials is reading the colour of each waste material e.g. plastic bottle, aluminum cans, glass bottles, and decides whether to act or keep moving. The Recycler acts only when its colour sensor detects aluminum cans (by indentifing certain colours / light intensity), and in that case, The Recycler stops and pushes the aluminum can into a funnel. The Recycler then moves to the next waste material, repeating its «check and decide» actions, repeating all steps untill it reaches the end of the conveyor belt. At that point the robot stops and returns back to the starting point to reapeat the procedure again and again.
V. Running “The Recycler”
Duration: 15 minutes
Aims:
Test the robot (robot operation / structure and programing)
Make conlusions and improvemets
The students run the robot, make conlusions and take corrective actions / improvements on robot and programming.
English
LESSON 1
Topic: LEGO MINDSTORMS EV3 set - vocabulary.
Time: 2 hours (2x45 min).
Aim:
The aim of the lesson is to provide students with general information about LEGO
MINDSTORMS EV3 educational set including:
- Lego parts
- Lego bricks
- Content of the set
Interaction:
- group work
- individual work
- the whole class
Resources:
- websites: https://quizlet.com/46494989/engineering-in-lego-ev3-robotics-lego-
vocabulary
- Lego parts glossary; source:
http://www.nationalroboticschallenge.org/downloads/recources/LEGO%20Part
s%20Glossary.pdf
- Interactive whiteboard
- Lego Mindstorms EV3 sets
Teaching methods:
- brainstorming
- mini – lecture
- discussion
- practical exercises
Stages of the lesson:
1. Introduction to the topic of the lesson:
What do I know about Lego? - group discussions
2. Associations with the word ‘Lego’. Brainstorming:
LEGO
3. Find the part in the Lego set:
A. A teacher displays the Lego part glossary on a whiteboard (source:
http://www.nationalroboticschallenge.org/downloads/recources/LEGO%20Part
s%20Glossary.pdf ) for 5 minutes. Students try to remember the names as
many parts as they can. Next, the students in groups write down the words

they remember by grouping them into categories: BRICKS, PLATES, LIFT
ARMS, AXLES, GEARS, PULLEYS, TIRES, BELTS, THREADS, PINS,
CONNECTORS, BUSHING, JOINERS, DISHES, ELECTRICAL PARTS,
OTHER
B. Check your answers:
The students check their answers with the glossary displayed on the
whiteboard again.
4. Practice the vocabulary:
A. The teacher uses the website: https://quizlet.com/46494989/engineering-in-lego-ev3-robotics-lego-vocabulary-flash-cards/ and plays the Lego vocabulary for the students, the students repeat.
B. Type what you hear – interactive exercise. The students type the words they can hear.
https://quizlet.com/46494989/speller
5. Find the part and name it.
They students work in groups. Their tasks is find all the Lego parts in Lego
Mindstorm EV3 sets and name them in English.
6. Test your knowledge:
The students solve exercises included in the test section of the website:
https://quizlet.com/46494989/test
(written questions, matching questions, multiple choice questions, true/false
questions). Then, they check their answers.

LESSON 2
Topic: LEGO MINDSTORMS EV3 – move an object and stop at object.
Time: 1 lesson (45 min)
Aims:
- Developing listening skills
- Deepening the scope of vocabulary (ICT, Lego set)
- Developing writing skills – instructions.
- Revising grammatical point - imperatives.
- Promoting interest in Lego and the project ‘Creative minds’.
Interaction:
- group work
- pair work
- individual work
- the whole class
Resources:
websites: https://www.youtube.com/watch?v=1MRlstUDRpI
https://youtu.be/wEHKb8ukuLk
- Interactive whiteboard
Teaching methods:
- brainstorming
- discussion
- practical exercises
Stages of the lesson:
1. Reminding Lego parts vocabulary, especially the kinds of sensors (whole
class brainstorming).
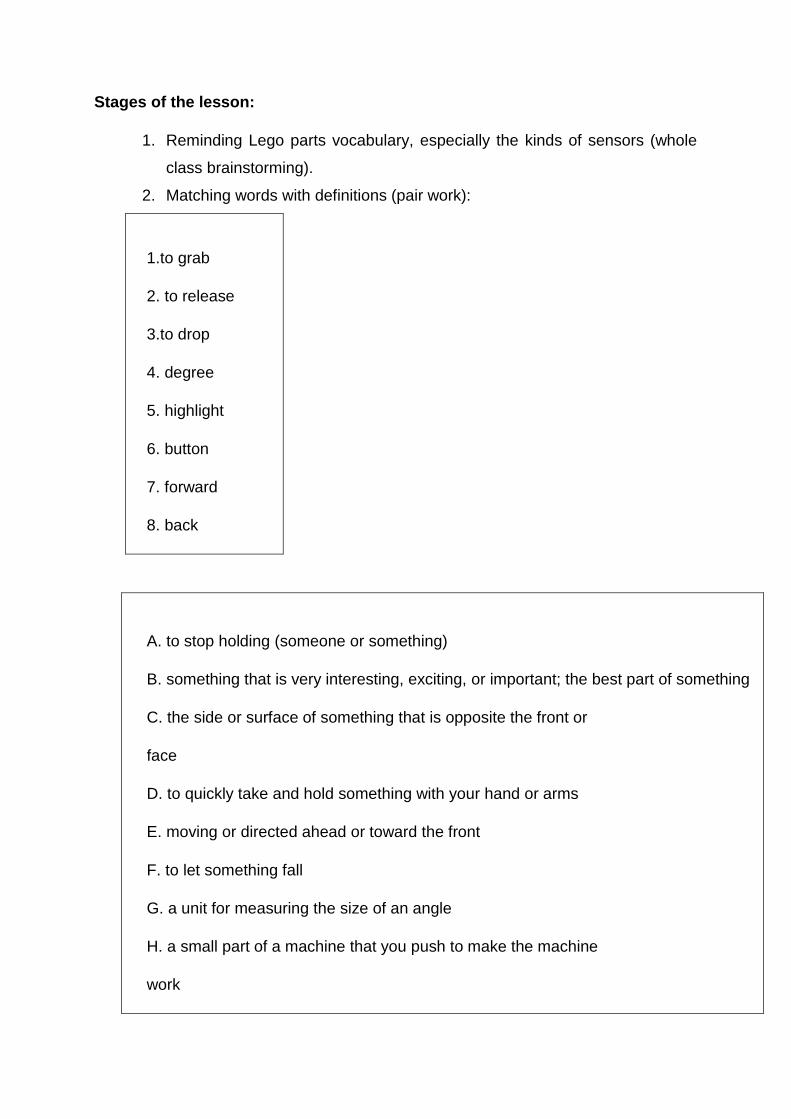
2. Matching words with definitions (pair work):
1.to grab
2. to release
3.to drop
4. degree
5. highlight
6. button
7. forward
8. back
A. to stop holding (someone or something)
B. something that is very interesting, exciting, or important; the best part of something
C. the side or surface of something that is opposite the front or
face
D. to quickly take and hold something with your hand or arms
E. moving or directed ahead or toward the front
F. to let something fall
G. a unit for measuring the size of an angle
H. a small part of a machine that you push to make the machine
work

3. Reminding usage of imperatives, creating example sentences (pair work).
4. Listening for specific information (individual work).
Instant success - move object and stop at object
https://www.youtube.com/watch?v=1MRlstUDRpI
https://youtu.be/wEHKb8ukuLk
Pre-listening - predicting the language used in the videos
Listening
Video 1– filling the missing information:
1. Moving an object is a ………. step process.
2. When we click on the interactive …………….., we can see in highlight where
we are in programming the robot .
3. We are going to use 3 …………… in our programming screen.
4. Program three steps: …………… a graba, ………… it and release it.
5. Next, ………………. the USB cable to the robot.
6. On the right down corner the EV3 button turns ……….. and all we need to
do is to ………… on the play button.
7. We can use it in Mathematics to practice using ………… to turn all model.
Video 2 – True/false exercise
1. In the activity ‘Stop at object’ ultrasonic sensor detects the change.
2. The sensor is connected to port number 4.
3. The robot moves forward and back.
4. The robots is programmed to move forwards, see the change, stop and
move back.
5. When the robot stops, it has one second pause.
6. The robot sees the change of 5 cm.

Post listening:
Writing instructions how to move an object - group work.
5. Homework
Writing instructions how to stop at object.
LESSON 3
Topic: LEGO MINDSTORMS EV3 – stop at angle and stop at line.
Time: 1 lesson (45 min)
Aims:
- Developing listening skills
- Deepening the scope of vocabulary (ICT, Lego set)
- Developing speaking skills - fluency/accuracy practice/consolidating recently
taught language
- Developing the skill of programming Lego robots
- Promoting interest in Lego and the project ‘Creative minds’.
Interaction:
- group work
- individual work
- the whole class
Resources:
Websites: https://youtu.be/BUaZ7H4pkuc
https://youtu.be/eZf5-6_b0rk
- Interactive whiteboard
- Laptops with Lego EV3 software
- Lego robots constructed in Technology lesson

Teaching methods:
- brainstorming
- practical exercises
- communication
- working with computers
Stages of the lesson:
1. Reminding Lego parts vocabulary (whole class brainstorming).
2. Listening for specific information (individual work).
Instant success - stop at angle and stop at line
https://youtu.be/BUaZ7H4pkuc
https://youtu.be/eZf5-6_b0rk
Pre-listening Students predict some words or expressions that might be in the
video
Listening - True/false exercises
Video 1
1. In the activity ‘Stop at angle’ we use gyro sensor.
2. In the activity ‘Stop at angle’ the robot moves forward.
3. We use geometry measures in the activity.
4. The robot is turning with two motors.
5. If the robot is drifting, you need to unplug the gyro, wait for a second and
then plug it again.

Video 2
1. To do the activity ‘Stop at line’ the color sensor was used.
2. The sensor needs to be connected at the back.
3. After connecting the sensor, the green reflective line can be seen red.
4. You can set the light level.
5. It is the three step program.
Post listening:
Speaking: instructions how to stop at angle and how to stop at line - group work.
3. Programming Lego robots using laptops and EV3 software.
Group 1 and 2 – stop at angle
Group 3 and 4 – stop at line
LESSON 4 Topic: Building industry - vocabulary.
Time: 2 hours (2 x 45 min.)
Aims:
- Deepening the scope of vocabulary – building industry
- Developing listening skills
- Developing reading comprehension skills
- Developing writing skills
- Revising grammatical points – Present Simple tense, gerund.
- Promoting interest in Lego and the project ‘Creative minds’.
Interaction:
- group work
- individual work
- the whole class
Resources:
- websites:
http://www.languageguide.org/angielski/s%C5%82ownictwo/narz%C4%99dzia/
http://www.myhistro.com/show-story/156348#
- interactive whiteboard
- laptops
Teaching methods:
- brainstorming
- mini – lecture
- practical exercises
- work with a computer
Stages of the lesson:
1. Associations with ‘Building industry’. Brainstorming:
BUILDING
INDUSTRY

2. Building tools
Listening
Students listen and repeat the names of building tools. They try to remember
as many words as they can.
http://www.languageguide.org/angielski/s%C5%82ownictwo/narz%C4%99dzia/
Speaking:
The students tell the names of tools shown in pictures.
3. Revising grammatical points – Present Simple tense, gerund.
The students revise the usage and structure of sentences in Present Simple
Tense and gerund. They fill the missing sentences and then create their own
ones.
You need …………. for building.
A builder ……….. bricks for building.
……… you need a hammer on the building site?
……… he need a hammer on the building site?
You ……….. need a wardrobe on the building site.
He ………… need …………….. on the building site.
4. Building industry over centuries.
The students read short texts presented in the form of timeline on how
technological processes have changed over centuries. They use laptops for this
task.
My histro timeline: http://www.myhistro.com/show-story/156348#

The students answer questions concerning the texts.
What kind of materials did people use to build in prehistory?
What are the most impressive buildings of the Gothic style?
Who were the most beautiful buildings built for in Ancient Greece?
What was the new design invented in Ancient Rome?
What is the Renaissance style characterized by?
How was the Romanesque style called?
Which style was full of contrasts?
What was the main building material in Classicism?
5. Mini-dictionary of building industry:
A. The students work in groups. They use laptops to select the words
connected with building industry. They create mini-dictionary of vocabulary
connected with building industry.
B. The groups exchange effects of their work and create one dictionary.
By Polish and Cypriot teachers