
Lecture - University of Illinois Urbana-Champaign
5
11/29/17 Lecture # 32 .
Transcript of Lecture - University of Illinois Urbana-Champaign

11/29/17
Lecture# 32
.

rigidbody
* .?YIIFI¥IIt÷€ ,gangumtmrepm
HE = MI .net -
tI=±#inertia matrix
Moment of inertia : wrt point Q and an axis a
a
,;¥÷IO÷E¥¥.Iaaf
.Pam{ I ,a= a #a) }For us
E=I,and Q will frequently be the
Center of mats . Iaszz = Ia ,fQ = Center of mass Izz
Composite bodies .
÷Fan = IF;+Iqz @ B=Q+Bz

exempts moment of inertia of a solid cylinder
t¥E¥÷etftp.Iqgti#iiaIEsaia:zYP=tfp-zh-DIgI=m=R2r=aMy
-
Fexample thin rod =¥j>Ftd : Iszn #one IMF - Kam -
f.es?sdx=sEx3kI=,mzL2example:_the sphere
n4et⇐t#E¥#I * '
sina.AE#*I*IEn.EE*.t0IFE
out

www.YIIF.yyamsta.no#ag.example_moment of inertia of a flat lollipop .
*
If.EE#rmaisa=9g.
K .Fini
,
I.io#mrod=1g=solution: Fdo "i= ( to )3e + (F) 7e=(¥)=
HgIii=I;f+±d¥fOIdd,yn={ invoke parallel axis }= mdik (xcdisilycdise ) + Idgisp'
= 9
(72+0)-9=11.10
;¥ = mmd ( xiod?
+ yard'
) +Igel= I ( 32+02 ) x ( l
0⇒ 1.62=12
Motion in the plane
¥FE¥¥÷¥I¥e¥iaI÷¥Cannot o translate I direction
° a and y axis
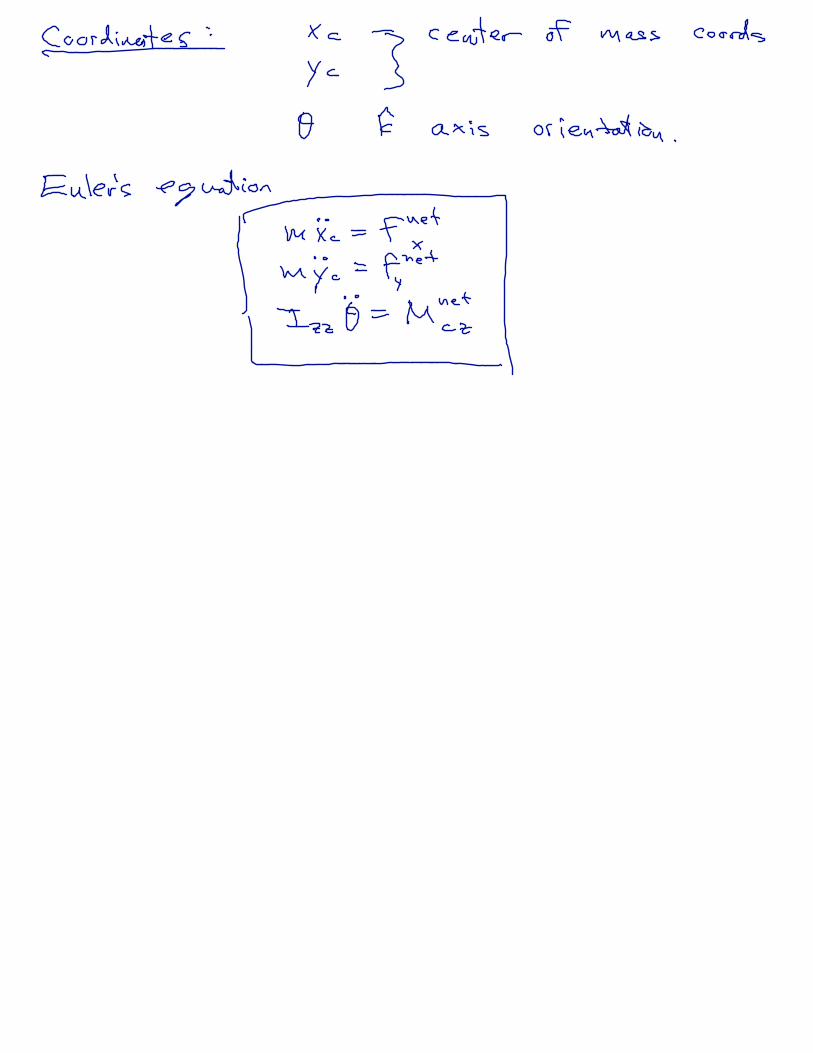
Coordinates Xc
]Centerof mass coords
: I axis orientation.
eueisertigmIII.EE#eIIf


















