Introduction to Finite Element Analysis (FEA) or Finite Element ...

Lecture notes forFinite Element Methods
Autumn Term 2013, Uppsala Universitet
Patrick Henning
Date: December 2, 2013
(this script is based on the previous lecture by A. Malqvist and the book
’The Finite Element Method: Theory, Implementation, and Practice’ by M.G. Larson and F. Bengzon)

II

Contents
1 Lecture 1 and 2 31.1 Piecewise polynomial approximations in 1D . . . . . . . . . . . . . 31.2 Continuous Piecewise Linear Polynomials . . . . . . . . . . . . . . . 51.3 Interpolation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.4 Continuous Piecewise Linear Interpolation . . . . . . . . . . . . . . 81.5 L2-Projection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.6 Computation of an L2-Projection Ph(f) . . . . . . . . . . . . . . . . 101.7 Numerical Integration with Quadrature Rules . . . . . . . . . . . . 111.8 Error in Quadrature Rules . . . . . . . . . . . . . . . . . . . . . . . 131.9 Implementation of the L2−Projection . . . . . . . . . . . . . . . . . 131.10 Exercise 4.1 - Cauchy-Schwarz inequality . . . . . . . . . . . . . . . 16
2 Lecture 3 and 4 172.1 Weak formulation of the problem . . . . . . . . . . . . . . . . . . . 172.2 The Finite Element Method . . . . . . . . . . . . . . . . . . . . . . 182.3 Derivation of the discrete system . . . . . . . . . . . . . . . . . . . 182.4 Basic a priori error estimate . . . . . . . . . . . . . . . . . . . . . . 192.5 Mathematical modeling and boundary conditions . . . . . . . . . . 212.6 Model problem with coefficient and general Robin BC . . . . . . . . 232.7 A posteriori error estimate and adaptivity . . . . . . . . . . . . . . 25
3 Lectures 5 and 6 293.1 Meshes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293.2 Data structure for mesh . . . . . . . . . . . . . . . . . . . . . . . . 293.3 Mesh generation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313.4 Piecewise polynomial spaces . . . . . . . . . . . . . . . . . . . . . . 313.5 Interpolation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333.6 L2-projection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343.7 Existence and uniqueness of the projection . . . . . . . . . . . . . . 353.8 A priori error estimate . . . . . . . . . . . . . . . . . . . . . . . . . 363.9 Quadrature and numerical integration . . . . . . . . . . . . . . . . . 37
III

1
3.10 Implementation details . . . . . . . . . . . . . . . . . . . . . . . . . 38
4 Lecture 7, 8 and 9 414.1 Weak formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 414.2 Finite Element Method . . . . . . . . . . . . . . . . . . . . . . . . . 434.3 The Dirichlet Problem . . . . . . . . . . . . . . . . . . . . . . . . . 464.4 The Neumann Problem . . . . . . . . . . . . . . . . . . . . . . . . . 474.5 Elliptic Problems with a Convection Term . . . . . . . . . . . . . . 484.6 Eigenvalue Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . 494.7 Error analysis and adaptivity . . . . . . . . . . . . . . . . . . . . . 50
5 Lecture 10 575.1 Systems of Ordinary Differential Equations . . . . . . . . . . . . . . 575.2 Heat equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 595.3 Wave equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61

2 CONTENTS

Chapter 1
Lecture 1 and 2
1.1 Piecewise polynomial approximations in 1D
Summary:
• Introduction of a class of functions that can approximate quite arbitraryfunctions and that are easy to implement,
• Introduction of two methods of approximation,
• Discussion of the quality of the approximations.
Let I := [x0, x1] ⊂ R for x0 < x1 and let P1(I) := v| v(x) = c0 + c1x; c0, c1 ∈ R.Every linear function v on I is uniquely defined by c0, c1 via v(x) = c0 + c1x.
-
6
x0 x1
c0
slope c1 = v′(x)
Alternatively, the function v can be also characterized by two values α0, α1 viaα0 = v(x0) and α1 = v(x1).
3

4 CHAPTER 1. LECTURE 1 AND 2
-
6
x0 x1
α0
α1 t t
Note that typically c0, c1 6= α0, α1, however they are related by a linear systemof equations:
c0 + c1x0 = α0
c0 + c1x1 = α1=⇒
(1 x0
1 x1
)(c0
c1
)=
(α0
α1
).
The matrix is invertible since the determinant is positive:∣∣∣∣1 x0
1 x1
∣∣∣∣ = x1 − x0 > 0.
Consequently, every pair c0, c1 corresponds with a pair α0, α1 and vice versa.
Now, let λ0, λ1 ∈ P1(I) such that λ0(x0) = 1, λ0(x1) = 0 and such that λ1(x0) = 0,λ1(x1) = 1. λ0 and λ1 are uniquely determined. Any v ∈ P1(I) can be written asv(x) = α0λ0(x) + α1λ1(x). What are the equations for λ0 and λ1?
-
6
x0 x1
1
λ0
-
6
x0 x1
1
λ1
We obtain
λ0(x) =x1 − xx1 − x0
and λ1(x) =x− x0
x1 − x0
.
The set λ0, λ1 spans P1(I) (i.e. it is a basis).

1.2. CONTINUOUS PIECEWISE LINEAR POLYNOMIALS 5
1.2 Continuous Piecewise Linear Polynomials
Let a = x0 < x1 < ... < xN = b, where xiNi=0 are nodes. Let furthermoreIi := [xi−1, xi], i = 1, 2, .., N and let hi := xi − xi−1 denote the length of Ii. WithI := [a, b] we let Vh := v ∈ C0(I)| v|Ii ∈ P1(Ii). Here, C0(I) defines the space ofcontinuous functions on I.
v ∈ Vh is uniquely defined by v(xi)Ni=0.
v(x0)v(xN)
-
6
x0
=
a
x1 x2 xN
=b
s s s s s s
Let φjNj=0 ⊂ Vh be functions so that for i, j = 0, ..., N :
φj(xi) =
1 i = j
0 i 6= j.
-
6
x0 x1 xj−1 xj xj+1 xN
1
”hat function”
Now φjNj=0 forms a basis of Vh, i.e. any v ∈ Vh can be written as
v(x) =N∑i=0
αiφi(x), where αi = v(xi).

6 CHAPTER 1. LECTURE 1 AND 2
We have
φi(x) =
x−xi−1
hi, x ∈ Ii,
xi+1−xhi+1
, x ∈ Ii+1,
0, otherwise.
1.3 Interpolation
Let f : I = [x0, x1]→ R be a continuous function. We define the linear interpolantΠ(f) ∈ P1(I) by Π(f) := f(x0)φ0 + f(x1)φ1.
-
6
x0 x1
s sf
Π(f )
We would like to study the error f − Π(f) in the L2−norm. Let therefore
‖w‖L2(I) :=
(∫I
w(x)2 dx
) 12
(the L2-norm)
Why is this a norm? Properties that characterize a norm:
(i) ‖w‖ = 0 ⇔ w = 0
(ii) ‖λw‖ = |λ|‖w‖ for all w ∈ Vh and λ ∈ R
(iii) ‖v + w‖ ≤ ‖v‖+ ‖w‖ for all v, w ∈ Vh.
They are fulfilled by the L2−norm, since:
(i) if w = 0, we obviously have ‖w‖L2(I) = 0,
if ‖w‖2L2(I) =
∫Iw(x)2 dx = 0 ⇒ w = 0, because w2 ≥ 0.
(ii) ‖λw‖L2(I) =(∫
I(λw(x))2 dx
) 12 = (λ2)
12
(∫Iw(x)2 dx
) 12 = |λ|‖w‖L2(I).

1.3. INTERPOLATION 7
(iii) To verify (iii), we require the Cauchy-Schwarz inequality (respectively Holderinequality) which implies∫
I
v(x)w(x) dx ≤ ‖v‖L2(I)‖w‖L2(I). (1.3.1)
Using it we obtain:
‖v + w‖2L2(I) =
∫I
(v(x) + w(x))2 dx =
∫I
v(x)2 + 2v(x)w(x) + w(x)2 dx
≤ ‖v‖2L2(I) + 2‖v‖L2(I)‖w‖L2(I) + ‖w‖2
L2(I) =(‖v‖2
L2(I) + ‖w‖2L2(I)
)2
.
Proposition 1.3.1. Let f ∈ C2(I) (two times continuously differentiable), thenit holds
‖f − Π(f)‖L2(I) ≤ h2‖f ′′‖L2(I),
‖(f − Π(f))′‖L2(I) ≤ h‖f ′′‖L2(I),
where h := x1 − x0.
Proof. Let e := f − Π(f). We have for arbitrary y ∈ I:
e(y) = e(x0) +
∫ y
x0
e′(x) dx.
Since e(x0) = 0 by the definition of Π(f), we get
e(y) =
∫ y
x0
e′(x) dx =
∫ y
x0
1 e′(x) dx(1.3.1)
≤(∫ y
x0
12 dx
) 12(∫ y
x0
(e′(x))2 dx
) 12
≤ h12‖e′‖L2(I).
Therefore we get e(y)2 ≤ h‖e′‖2L2(I) which implies:
‖e‖2L2(I) =
∫I
e(y)2 dy ≤ h‖e′‖2L2(I)
∫I
1 dy = h2‖e′‖2L2(I). (1.3.2)
It remains to estimate ‖e′‖L2(I). We use the mean value theorem (applied to e′)which gives us the existence of a ξ ∈ I such that
e′(ξ) =e(x1)− e(x0)
x1 − x0
= 0 (because of e(x0) = e(x1)). (1.3.3)

8 CHAPTER 1. LECTURE 1 AND 2
Now let y ∈ I be arbitrary, then we get e′(y) = e′(ξ) +∫ yξe′′(x) dx =
∫ yξe′′(x) dx
which implies
e′(y) =
∫ y
ξ
e′′(x) dx ≤∫I
|e′′(x)| dx ≤ h12
(∫I
|e′′(x)|2 dx) 1
2
= h12
(∫I
|f ′′(x)|2 dx) 1
2
,
where we used Π(f)′′ = 0. We get∫I
|e′(y)|2 dy ≤ h
∫I
∫I
|f ′′(x)|2 dx dy = h2
∫I
|f ′′(x)|2 dx.
Combining the last estimate with (1.3.2), we get
‖e‖L2(I) ≤ h‖e′‖L2(I) ≤ h2‖f ′′‖L2(I).
1.4 Continuous Piecewise Linear Interpolation
Now let Π(f) :=∑N
i=0 f(xi)φi.
Proposition 1.4.1. Let f ∈ C0(I) and f ∈ C2(Ii) for all 1 ≤ i ≤ N , then it holds
‖f − Π(f)‖2L2(I) ≤
N∑i=1
h4i ‖f ′′‖2
L2(Ii),
N∑i=1
‖(f − Π(f))′‖2L2(Ii)
≤N∑i=1
h4i ‖f ′′‖2
L2(Ii),
where hi := xi − xi−1.
Proof. We can use Proposition 1.3.1 and apply it to each of the intervals Ii toobtain
‖f − Π(f)‖2L2(I) =
N∑i=1
‖f − Π(f)‖2L2(Ii)
≤N∑i=1
h4i ‖f ′′‖2
L2(Ii)
and simultaneously
‖(f − Π(f))′‖2L2(I) =
N∑i=1
‖(f − Π(f))′‖2L2(Ii)
≤N∑i=1
h2i ‖f ′′‖2
L2(Ii).

1.5. L2-PROJECTION 9
We make three observations:
1. Π(f)→ f as (max1≤i≤N hi)→ 0.
2. Π(f) is a bad approximation if f ′′ is big.
3. Non-uniform refinements in hi can be used to reduce terms where ‖f ′′‖L2(Ii)
is big.
1.5 L2-Projection
Let I = [a, b]. Notation: in the following we just write∫Iv instead of
∫Iv(x) dx if
the variable of integration is clear from the context.We consider the space L2(I) := v|
∫Iv(x)2 dx < ∞ with the scalar product
(v, w) :=∫Iu · v. Recall the properties of a scalar product:
(i) (v, w) = (w, v) for all v, w ∈ L2(I) (symmetry),
(ii) (αv+βw, z) = α(v, z)+β(w, z) for all v, w, z ∈ L2(I) and α, β ∈ R,
(iii) ∀v ∈ L2(I): (v, v) ≥ 0 and ’(v, v) = 0 ⇔ v=0’.
Each of the properties is obviously fulfilled.
We have already defined the corresponding norm
‖v‖L2(I) =
(∫I
v2
) 12
= (v, v)12 .
The normed vector space L2(I) with the above scalar product (inner product)is a Hilbert space (i.e. every Cauchy sequence converges). The ’L’ comes fromLebesgue who introduced the so called ’Lebesque integral’ that we use nowadays.
We say two L2-functions v and w are orthogonal if (v, w) = 0.
The Cauchy-Schwarz inequality holds for all v, w ∈ L2(I):
(v, w) ≤ ‖v‖L2(I)‖w‖L2(I) (proved later).
The triangle inequality holds for all v, w ∈ L2(I):
‖v + w‖L2(I) ≤ ‖v‖L2(I) + ‖w‖L2(I).

10 CHAPTER 1. LECTURE 1 AND 2
Proof. Using Cauchy-Schwarz, we get:
‖v + w‖2L2(I) = (v + w, v + w) = (v, v + w) + (w, v + w)
≤ ‖v‖L2(I)‖v + w‖L2(I) + ‖w‖L2(I)‖v + w‖L2(I).
Dividing by ‖v + w‖L2(I) yields the result. If ‖v + w‖L2(I) = 0, the result istrivial.
Let f ∈ L2(I), where I is an interval in R. We define the L2−projection
Ph : L2(I)→ Vh = v ∈ C0(I)| v|Ii ∈ P1(Ii)
by: Ph(f) ∈ Vh fulfills∫I
(f − Ph(f)) · vh = 0 for all vh ∈ Vh.
Note that
‖f − Ph(f)‖2L2(I) = (f − Ph(f), f − Ph(f))
= (f − Ph(f), f − vh) + (f − Ph(f), vh − Ph(f))︸ ︷︷ ︸=0
≤ ‖f − Ph(f)‖L2(I)‖f − vh‖L2(I)
and therefore
‖f − Ph(f)‖L2(I) ≤ ‖f − vh‖L2(I) for all vh ∈ Vh.
Ph(f) is the best approximation of f in Vh with respect to the L2−norm.
1.6 Computation of an L2-Projection Ph(f )
To find Ph(f) ∈ Vh with (f −Ph(f), vh) = 0 for all vh ∈ Vh is equivalent to findingPh(f) ∈ Vh with
(f − Ph(f), φj) = 0 for all j = 0, ..., N,
where Vh = span(φjNj=0) and φj being the hat functions defined in Section 1.2(which form a basis of Vh).

1.7. NUMERICAL INTEGRATION WITH QUADRATURE RULES 11
Since Ph(f) ∈ Vh we can write it as Ph(f) =∑N
j=0 ξjφj with appropriate ξj ∈ R.Therefore
’find Ph(f) ∈ Vh : (Ph(f), vh) = (f, vh) for all vh ∈ Vh’
⇐⇒ ’find ξ0, ..., ξN ∈ R :N∑j=0
ξj(φj, φi) = (f, φi) for all 0 ≤ i ≤ N ’.
The real numbers ξ = (ξ0, ..., ξN) are the coefficients for describing Ph(f) in termsof the hat basis functions: Ph(f) =
∑Nj=0 ξjφj. The problem can be expressed as
a linear system of equations. We define the Matrix M ∈ R(N+1)×(N+1) and thevector b ∈ R(N+1) by
Mij := (φj, φi) =
∫I
φi · φj (computable)
bi := (f, φi) =
∫I
f · φi (computable).
We get bi =∑N
j=0Mijξj for i = 0, ..., N or equivalently b = Mξ. This leads to thefollowing algorithm for the computation of Ph(f):
Algorithm
1. Initiate mesh with N elements x0 < x1 < ... < xN .
2. Compute M and b.
3. Solve Mξ = b.
4. Let Ph(f) =∑N
j=0 ξjφj.
1.7 Numerical Integration with Quadrature Rules
We want to approximate integrals numerically. We denote
J(f) :=
∫I
f(x) dx.
A quadrature rule is formula to approximate an integral. The formula takes valuesat f(xj), multiplies them with so called weights ωj (which represent small volumeunits) and sums up everything, i.e.:
J(f) ≈ QI(f) :=n∑j=1
ωjf(xj), xj ∈ [a, b].
Examples:

12 CHAPTER 1. LECTURE 1 AND 2
1. Midpoint rule. Let n = 1, x1 = a+b2
, ω1 = b− a.
J(f) ≈ QI(f) := f(x1)(b− a) = f
(a+ b
2
)(b− a).
This rule is exact for linear functions f .
-
6
a b
s f
QI(f )
2. Trapezoidal rule. Let n = 2, x1 = a, x2 = b, ω1 = ω2 = b−a2
.
J(f) ≈ QI(f) :=f(a) + f(b)
2(b− a).
This rule is exact for linear functions f .
-
6
a b
s sf
QI(f )
3. Simpson’s rule. Let g(x) := γx2 + βx + α and I = [0, h]. We wish todetermine α, β and γ such that g(0) = f(0), g(h
2) = f(h
2) and g(h) = f(h),
i.e. g is a quadratic interpolation of f . In particular: if f is a quadraticpolynomial, then f = g. Now, find α, β, γ ∈ R such that
g(0) = α = f(0), g(h
2) = γ
h2
4+ β
h
2+ α and g(h) = γh2 + βh+ α = f(h).
We obtain the following the linear system of equations for α, β and γ:1 0 0
1 h2
h2
4
1 h h2
αβγ
=
f(0)f(h
2)
f(h)
with solution
αβγ
=
f(0)2h
(−1
2f(h)− 3
2f(0) + 2f(h
2))
2h2
(f(h)− 2f(h
2) + f(0)
) .

1.8. ERROR IN QUADRATURE RULES 13
Computing the integral of g over I by using the above values for α, β andγ, we obtain ∫ h
0
g(x) dx =h
6(f(0) + 4f(
h
2) + f(h)).
This means, that the quadrature rule
J(f) ≈ QI(f) :=f(a) + 4f(a+b
2) + f(b)
6(b− a)
is exact for quadratic functions f (because in this case we have f = g).
4. Gauss quadrature rule. So called Gauss quadratures are higher orderquadrature rules which can be exact for arbitrary polynomials.
1.8 Error in Quadrature Rules
Let QI(f) be a quadrature rule which is exact for polynomials of degree ’≤ p’.Then ∣∣∣∣∫
I
f(x) dx−QI(f)
∣∣∣∣ ≤ C|I|p+1 supy∈I
∣∣∣∣ ∂p+1
∂xp+1f(y)
∣∣∣∣ ,where C is a constant independent of I and f .
1.9 Implementation of the L2−Projection
We describe the assembling of the mass matrix M with entries
Mij =
∫I
φj · φi where φi(x) =
x−xi−1
hi, x ∈ Ii,
xi+1−xihi+1
, x ∈ Ii+1,
0, otherwise.
-
6
xi−3 xi−2 xi−1 xi xi+1
1 φiφi−1

14 CHAPTER 1. LECTURE 1 AND 2
We compute the entries. First, observe that Mij = 0 if |i− j| > 1. For Mii we get
Mii =
∫I
φ2i =
∫Ii−1
(x− xi−1
hi
)2
dx+
∫Ii
(xi+1 − xhi+1
)2
dx
=1
h2i
[(x− xi−1)3
3
]xixi−1
+1
h2i+1
[−(xi+1 − xi)3
3
]xi+1
xi
=hi3
+hi+1
3, i = 1, ..., N − 1.
M00 =hi3
and MNN =hN3.
Sine the matrix M is symmetric, it remains to calculate Mi+1,i.
Mi+1,i =
∫I
φi · φi+1 =
∫Ii
(xi+1 − xhi+1
)·(x− xihi+1
)dx
=1
h2i+1
[−(xi+1 − x)2
2(x− xi)
]xi+1
xi
− 1
h2i+1
∫ xi+1
xi
−(xi+1 − x
2
)2
dx
1
h2i+1
[(xi+1 − x)3
6
]xi+1
xi
=hi+1
6, i = 0, ..., N.
We obtain a tridiagonal matrix:
M =
h13
h16
0 · · · 0h16
h13
+ h23
h26
. . ....
0. . . . . . . . . 0
.... . . . . . hN
6
0 · · · 0 hN6
hN3
.
Observe that M can written in the following localized structure:
M =
h13
h16
h16
h13
+
h23
h26
h26
h23
+ ... +
hN3
hN6
hN6
hN3
.
We can therefore easily identify the local contribution from an element Ii anddenote this contribution by M Ii , i.e.
M Ii :=1
6
(2 11 2
)hi (local mass matrix).
Algorithm:

1.9. IMPLEMENTATION OF THE L2−PROJECTION 15
1. Allocate memory for a (N + 1)× (N + 1) matrix.
2. For i = 1, ..., N :
Compute M Ii = 16
(2 11 2
)hi.
Add M Ii1,1 to Mi,i
M Ii1,2 to Mi,i+1
M Ii2,1 to Mi+1,i
M Ii2,2 to Mi+1,i+1
end.
Assembly of local vectorWe use the trapezoidal rule for assembling an approximation of the exact right
hand side vector for the L2−projection. An exact entry of the right hand side isgiven by
bi :=
∫I
f · φi =
∫ xi
xi−1
f · φi +
∫ xi+1
xi
f · φi.
Using the trapezoidal rule and φi(xi−1) = φi(xi+1) = 0, we can approximate bi by
bi ≈f(xi−1)φi(xi−1) + f(xi)φi(xi)
2(xi − xi−1) +
f(xi)φi(xi) + f(xi+1)φi(xi+1)
2(xi+1 − xi)
= f(xi)hi + hi+1
2.
The approximate right hand side b is therefore given by:
b :=
f(x0)h1
2
f(x1)h1+h22
...
f(xN−1)hN−1+hN2
f(xN)hN2
=
f(x0)f(x1)
0...0
h1
2
︸ ︷︷ ︸bI1
+
0
f(x1)f(x2)
0...
h2
2
︸ ︷︷ ︸bI2
+ ... +
0...0
f(xN−1)f(xN)
hN2
︸ ︷︷ ︸bIN
.
Algorithm:

16 CHAPTER 1. LECTURE 1 AND 2
1. Allocate memory for a (N + 1)× 1 vector.
2. For i = 1, ..., N :
Compute bIi = 12
(f(xi−1)f(xi)
)hi.
Add bIi1 to bi−1
bIi2 to bi
end.
1.10 Exercise 4.1 - Cauchy-Schwarz inequality
We prove the estimate ∣∣∣∣∫Ω
u · v∣∣∣∣ ≤ ‖u‖L2(I) · ‖v‖L2(I)
for all u, v ∈ L2(I).
Proof. Assume ‖v‖L2(I) 6= 0 (otherwise trivial). Let λ ∈ R. We get
0 ≤ ‖u− λv‖2L2(I) = ‖u‖2
L2(I) − 2λ
∫Ω
u · v + λ2‖v‖2L2(I). (1.10.1)
Now let
λ :=
∫Ωu · v
‖v‖2L2(I)
(trick!)
which makes (1.10.1) to read
0 ≤ ‖u‖2L2(I) − 2
(∫Ωu · v
)2
‖v‖2L2(I)
+
(∫Ωu · v
)2
‖v‖2L2(I)
.
Multiplying with ‖v‖2L2(I) yields
0 ≤ ‖u‖2L2(I)‖v‖2
L2(I) −(∫
Ω
u · v)2
,
which directly implies ∫Ω
u · v ≤ ‖u‖L2(I)‖v‖L2(I).

Chapter 2
Lecture 3 and 4
Finite Element Method in 1D
Summary:
• derive the Finite Element Method,
• study the error,
• implementation of the method.
Model problem: Find u ∈ C2(0, 1) such that
−u′′(x) = f(x), x ∈ I := (0, 1),
u(0) = u(1) = 0. (2.0.1)
Even in 1D it might be difficult or impossible to solve equations of type (2.0.1).We therefore seek a numerical approximation.
2.1 Weak formulation of the problem
We call a function v ∈ C0(0, 1) weakly differentiable if there exists a function wwith
∫I|w| <∞ and such that∫
I
v · φ′ = −∫I
w · φ
for all φ ∈ C1(0, 1) with φ(0) = φ(1) = 0. We write v′ := w for the weak derivativeof v. Let
V0 := v ∈ C0(0, 1)| ‖v‖L2(I) <∞, ‖v′‖L2(I) <∞ and v(0) = v(1) = 0,
17

18 CHAPTER 2. LECTURE 3 AND 4
where v′ denote the weak derivative. Multiplying (2.0.1) with a test functionv ∈ V0 and integration over I yields:∫
I
f · v =
∫I
−u′′ · v IP=
∫I
u′ · v′ − u′(1)v(1) + u′(0)v(0) =
∫I
u′ · v′.
The weak form reads: find u ∈ V0 s.t.∫I
u′ · v′ =∫I
f · v for all v ∈ V0. (2.1.1)
Comments:
1. If u is strong solution (i.e. solution of (2.0.1)), then it is also weak solution.
2. If u is a weak solution with u ∈ C2(I), it is also strong solution.
3. Existence and uniqueness of weak solutions is obtained by the Lax-Milgram-Theorem.
4. We can consider solutions with lower regularity using the weak formulation.
5. FEM gives an approximation of the weak solution.
In the following, we use the notation ‖ · ‖L2(I) := ‖ · ‖.
2.2 The Finite Element Method
Let Vh,0 := v ∈ Vh| v(1) = v(0) = 0, where
Vh := c ∈ C0(I)| v|Ii ∈ P1(Ii).
Find uh ∈ Vh,0 s.t. ∫I
u′h · v′ =∫I
f · v for all v ∈ Vh,0. (2.2.1)
We call uh the Finite Element Approximation of u.
2.3 Derivation of the discrete system
Problem (2.2.1) is equivalent to: find uh ∈ Vh,0 s.t.∫I
u′h · φ′i =
∫I
f · φi for 1 ≤ i ≤ N − 1.

2.4. BASIC A PRIORI ERROR ESTIMATE 19
Note that the index is only from 1 to N−1, because of the zero boundary condition!Now, let uh =
∑N−1j=1 ξjφj. Then∫
I
f · φi =
∫I
(N−1∑j=1
ξjφ′j
)· φ′i =
N−1∑j=1
ξj
∫I
φ′j · φ′i for 1 ≤ i ≤ N − 1.
Let A ∈ R(N−1)×(N−1) and b ∈ RN−1 be given by the entries
Ai,j :=
∫I
φ′j · φ′i for 1 ≤ i, j ≤ N − 1,
bi :=
∫I
f · φi for 1 ≤ i ≤ N − 1.
We have
bi =N−1∑j=1
Ai,jξj for 1 ≤ i ≤ N − 1.
The algebraic problem reads therefore: find ξ ∈ RN−1
b = Aξ.
A is called the stiffness matrix.
Algorithm
1. Initiate a mesh with N elements.
2. Compute A and b.
3. Solve the system Aξ = b.
4. Set uh =∑N−1
j=1 ξjφj.
2.4 Basic a priori error estimate
We study the error e := u− uh.
Theorem 2.4.1.uh ∈ Vh,0 satisfies the Galerkin orthogonality:∫
I
(u− uh)′ · v′h = 0 for all vh ∈ Vh,0. (2.4.1)

20 CHAPTER 2. LECTURE 3 AND 4
Proof. Since Vh,0 ⊂ V0 we obtain from (2.1.1) and (2.2.1) that∫I
u′ · v′h =
∫I
f · vh for all vh ∈ Vh,0,∫I
u′h · v′h =
∫I
f · vh for all vh ∈ Vh,0.
Subtracting both equations gives the result.
Theorem 2.4.2.It holds
‖(u− uh)′‖L2(I) ≤ ‖(u− vh)′‖L2(I) for all vh ∈ Vh,0.
Proof. With u− uh = u− vh + vh − uh we obtain
‖(u− uh)′‖2L2(I) = ((u− uh)′, (u− uh)′)
= ((u− uh)′, (u− vh)′) + ((u− uh)′, (vh − uh)′)︸ ︷︷ ︸=0, because of (2.4.1).
≤ ‖(u− uh)′‖L2(I)‖(u− vh)′‖L2(I).
Dividing by ‖(u− uh)′‖L2(I) finishes the proof. (If ‖(u− uh)′‖L2(I) = 0, the resultis trivial.)
Theorem 2.4.3 (A priori error estimate).It holds
‖(u− uh)′‖2L2(I) ≤
N∑i=1
h2i ‖u′′‖2
L2(Ii).
Note: even though we do not prove it, the solution u of (2.1.1) has a second weakderivative in the weak sense. Therefore, the above equation is justified.

2.5. MATHEMATICAL MODELING AND BOUNDARY CONDITIONS 21
Proof. We have by Theorem 2.4.2
‖(u− uh)′‖2L2(I) ≤ ‖(u− Π(u))′‖2
L2(I) ≤N∑i=1
h2i ‖u′′‖2
L2(Ii),
where we used the estimate from Proposition 1.4.1.
The error is expressed in terms in terms of the exact solution. If it is expressedin terms of the computed solution uh it is an a posteriori error estimate (this yieldsa computable error bound). We will return to this.
We note:
1. uh → u in the ‖v′‖-norm as (max1≤i≤N hi)→ 0. If ‖(u− uh)′‖L2(I) = 0 thenuh − u is constant, but since u(0) = uh(0) we also have u − uh = 0 andtherefore uh = u.
2. uh is the best approximation within the space Vh,0 with respect to the ‖v′‖-norm.
3. The error e = u− uh is orthogonal to Vh,0 in the (v′, w′) scalar product.
4. The norm ‖v′‖ is referred to as the energy norm and has often a physicalmeaning.
2.5 Mathematical modeling and boundary con-
ditions
Stationary heat equation:
0 x0
-
x1
-
L
q(x0) q(x1)
Heat source f

22 CHAPTER 2. LECTURE 3 AND 4
Let q denote the heat flux along the x-axis. The conservation of energy yields:
q(x0)− q(x1) +
∫ x1
x0
f(x) dx = 0.
and therefore ∫ x1
x0
q′(x) dx+
∫ x1
x0
f(x) dx = 0.
The heat flux is proportional to the negative temperature gradient q = −kT ′,where k is the thermal conductivity, i.e. heat flows from hot to cold. This givesus
−∫ x1
x0
(kT ′)′(x) dx =
∫ x1
x0
f(x) dx.
Since the interval [x0, x1] was arbitrary, we get
− (kT ′)′(x) = f(x) for all x ∈ I = (0, L).
Boundary conditions
There are three important types of boundary conditions (BC):
1. Dirichlet: T (0) = α and T (L) = β for two real numbers α and β. This BC isalso known as strong BC or essential BC. The temperature is kept a constantvalue at the boundary points (temperature regulator).
2. Neumann: T ′(0) = α and T ′(L) = β for two real numbers α and β. This BCis also known as natural BC. If T ′(0) = 0 then q(0) = 0, which means thatwe do not have flow over the boundary (no flow in, no flow out).
3. Robin: T ′(0) = αT (0) and T ′(L) = βT (L) for two real numbers α and β. Itsays that the flux is proportional to the heat - the larger the heat the largerthe flow.
Note that any combination is possible at the two boundary points.

2.6. MODEL PROBLEMWITH COEFFICIENT ANDGENERAL ROBIN BC23
2.6 Model problem with coefficient and general
Robin BC
Model problem:
−(au′)′ = f in I := (0, 1),
a(0)u′(0) = κ0(u(0)− g0),
a(1)u′(1) = κ1(u(1)− g1),
where a = a(x) with a(x) ≥ a0 > 0, f ∈ L2(I), κ0, κ1 ≥ 0. We derive the weakform. Let
V := v ∈ C0(0, 1)| ‖v‖L2(I) <∞ and ‖v′‖L2(I) <∞,
where v′ denotes the weak derivative. Multiplying with v ∈ V and integrationyield: ∫ 1
0
fv =
∫ 1
0
−(au′)′v =
∫ 1
0
au′v′ − a(1)u′(1)v(1) + a(0)u′(0)v(0)
=
∫ 1
0
au′v′ − κ1(u(1)− g1)v(1) + κ0(u(0)− g0)v(0)
for all v ∈ V . We gather all u-independent terms on the left and obtain∫ 1
0
au′v′ + κ0u(0)v(0)− κ1u(1)v(1) =
∫ 1
0
fv + κ0g0v(0)− κ1g1v(1)
for all v ∈ V .
Implementation:Let for simplification a = 1. We need to assemble a stiffness matrix A and a
load vector b. Let therefore uh =∑N
j=0 ξjφj and v = φi for i = 0, ..., N (observethat the sum is from 0 to N !). We get:
Aξ = b
with A ∈ R(N+1)×(N+1) and b ∈ RN+1 given by the entries
Ai,j :=
∫ 1
0
φ′jφ′i + κ0φj(0)φi(0)− κ1φj(1)φi(1),
bi :=
∫ 1
0
fφi + κ0g0φi(0)− κ1g1φi(1),

24 CHAPTER 2. LECTURE 3 AND 4
where 0 ≤ i, j ≤ N . Since
φi(x) =
x−xi−1
hi, x ∈ Ii,
xi+1−xhi+1
, x ∈ Ii+1,
0, otherwise.
We have
φ′i(x) =
1hi, x ∈ Ii,− 1hi+1
, x ∈ Ii+1,
0, otherwise.
We note that ∫ 1
0
φ′iφ′i =
∫ xi
xi−1
(φ′i)2 +
∫ xi+1
xi
(φ′i)2 =
1
hi+
1
hi+1
for i = 0, ..., N , and∫ 1
0
φ′iφ′i+1 =
∫ 1
0
φ′i+1φ′i =
∫ xi+1
xi
−1
hi+1
1
hi+1
=−1
hi+1
,
for i = 0, ..., N − 1. The terms κ0φj(0)φi(0) are only non-zero entries for i = j = 0and κ1φj(1)φi(1) is non-zero for i = j = N . We therefore get:
A =
κ0 + 1h1
− 1h1
0 · · · 0
− 1h1
1h1
+ 1h2− 1h2
. . ....
0. . . . . . . . . 0
.... . . . . . − 1
hN
0 · · · 0 − 1hN
1hN− κ1
.
If we use the trapezoidal rule for b, we get
b =
f(x0)h1
2+ κ0g0
f(x1)h1+h22
...
f(xN−1)hN−1+hN2
f(xN)hN2− κ1g1.
.

2.7. A POSTERIORI ERROR ESTIMATE AND ADAPTIVITY 25
We assemble the matrix A in the same way as M : Observe that M can written inthe following localized structure:
A =1
h1
1 −1−1 1
+1
h1
1 −1−1 1
+
... +1
hN
1 −1−1 1
+
κ0
−κ1
.
Algorithm:
1. Allocate memory for a (N + 1)× (N + 1) matrix A.
2. For i = 1, ..., N :
Compute AIi = 1hi
(1 −1−1 1
).
Add AIi1,1 to Ai,i
AIi1,2 to Ai,i+1
AIi2,1 to Ai+1,i
AIi2,2 to Ai+1,i+1
end.
Add κ0 to A0,0 and −κ1 to AN,N .
3. Assemble b as before and solve Aξ = b.
2.7 A posteriori error estimate and adaptivity
We go back to the original model problem to find u (weakly) such that
−u′′ = f, in I := (0, 1),
u(0) = u(1) = 0.

26 CHAPTER 2. LECTURE 3 AND 4
Proposition 2.7.1. It holds
‖(u− uh)′‖2 ≤N∑i=1
Ri(uh)2,
where the element residual is given by
Ri(uh) := hi · ‖f + u′′h‖L2(Ii).
Note that u′′h = 0 for piecewise linear Vh.
Proof. Let e := u− uh and observe that (e− Π(e))(xi) = 0 for every node xi (weuse that subsequently). We get with Galerkin orthogonality and the estimatesfrom Proposition 1.3.1:
‖e′‖2 =
∫ 1
0
e′e′ =
∫ 1
0
e′(e′ − Π(e)′)
=N∑i=1
∫ xi
xi−1
e′(e− Π(e))′
=N∑i=1
∫ xi
xi−1
(−e′′)︸ ︷︷ ︸=f+u′′h
(e− Π(e)) + [e′ (e− Π(e))︸ ︷︷ ︸=0 in nodes
]xixi−1
≤N∑i=1
‖f + u′′h‖L2(Ii)‖e− Π(e)‖L2(Ii)
≤N∑i=1
‖f + u′′h‖L2(Ii)h2i ‖e′′‖L2(Ii)
=N∑i=1
‖f + u′′h‖2L2(Ii)
h2i .
Adaptive mesh refinement
We want to use the bound to increase the number of nodes on the ’right ares’. Westart from:
‖(u− uh)′‖2 ≤N∑i=1
h2i · ‖f + u′′h‖2
L2(Ii),
Algorithm:

2.7. A POSTERIORI ERROR ESTIMATE AND ADAPTIVITY 27
1. Given a coarse mesh of N nodes.
2. While N ’not too large’
Compute uh,
Compute Ri := hi · ‖f + u′′h‖L2(Ii),
Select and refine Ii where Ri is big
end.
How to select and refine?
Example: let 0 ≤ α ≤ 1. If Rj > αmaxi=1,...,N Ri then split Ii into two, i.e.Inew,1i := [xi,
xi+xi+1
2] and Inew,2i := [xi+xi+1
2, xi+1].
Original grid
Refined grid

28 CHAPTER 2. LECTURE 3 AND 4

Chapter 3
Lectures 5 and 6
Piecewise polynomial approximation in 2D
Summary:
• construct mesh,
• construct the space Vh,
• interpolation,
• L2-projection
• implementation.
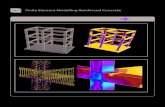
3.1 Meshes
Let Ω ⊂ R2 bounded with ∂Ω assumed to be polygonal.A triangulation Th of Ω is a set of triangles T such that
Ω =⋃T∈Th
T
and two triangles intersect by either a common triangle edge, or a corner, ornothing. Corners will be referred to as nodes. We let hT :=diam(T ) the length orthe largest edge.
3.2 Data structure for mesh
Let Th have N nodes and M triangles. The data is stored in two matrices. Thematrix P ∈ R2×N describes the nodes, i.e. the nodes (x1, y1), · · · (xN , yN) form the
29

30 CHAPTER 3. LECTURES 5 AND 6
entries:
P =
(x1 x2 · · · xNy1 y2 · · · yN
)and the matrix K ∈ R3×M describes the triangles, i.e. it describes which nodes(numerated from 1 to N) form a triangle T and how it is orientated:
K =
nα1 nα2 · · · nαMnβ1 nβ2 · · · nβMnγ1 nγ2 · · · nγM
.
This means that triangle Ti is formed by the nodes nαi , nβi and nγi (enumerationin counter-clockwise direction).
@@
@@@
@@@
nα
nβ
nγ
aTT
Example:
s
s
s
s
s
s
s
s@@@@@@
@@@@@@
@@@@@@
N1 = (0, 0) N2 = (1, 0) N3 = (2, 0)
N4
= (0, 1)
N5 = (1, 1) N6 = (2, 1)
N7 = (0, 2) N8 = (1, 2)
s
s
s
s
s
s
sT1
T2
T3
T4
T5
T6
That implies for our example:
P =
(0 1 2 0 1 2 0 10 0 0 1 1 1 2 2
)and
K =
1 2 2 3 4 52 5 3 6 5 84 4 5 5 7 7
.

3.3. MESH GENERATION 31
3.3 Mesh generation
In 2D given a set of nodes, the Delaunay algorithm gives a triangulation of quality,(a large smalls angle ’worst element’).
Matlab has a built in toolbox called ’PDE Tool Box’ and includes a mesh genera-tion algorithm.
1. Define geometry:
geom =
2 2 2 2 2 20 2 2 1 1 02 2 1 1 0 00 0 1 1 2 20 1 1 2 2 01 1 1 1 1 10 0 0 0 0 0
←− polygon←− x coordinate 1←− x coordinate 2←− y coordinate 1←− y coordinate 2←− domain to the right←− domain to the left
’domain to the right = 1’ means: to the right of the edge is R2 \ Ω.’domain to the left = 0’ means: to the left of the edge is Ω.
(0, 0) 1 (2, 0)
6 (1, 1)
2
(2, 1)
4
3
(0, 2) 5 (1, 2)
2. [p, e, t] =initmesh(geom, ’hmax’, 0.1 ), where e denotes the edge matrix.
3. pdemesh(p, e, t)
3.4 Piecewise polynomial spaces
Let T be a triangle with nodes
N1 = (x1, y1), N2 = (x2, y2), N3 = (x3, y3).

32 CHAPTER 3. LECTURES 5 AND 6
@@
@@@
@@@
(x1, y1)
(x2, y2)
(x3, y3)
T
We define
P1(T ) := v ∈ C0(T )| v(x, y) = c1 + c2x+ c3y, c1, c2, c3 ∈ R.
Now let vi = v(Ni) for i = 1, 2, 3. Note that v ∈ P1(T ) is determined by vi3i=1.
Given vi we compute ci by1 x1 y1
1 x2 y2
1 x3 y3
c1
c2
c3
=
v1
v2
v3
.
This is solvable due to
det
1 x1 y1
1 x2 y2
1 x3 y3
= 2|T | 6= 0.
Let λj ∈ P1(T ) be given by the nodal values
λj(Ni) =
1 i = j
0 i 6= j.
This gives us
v(x, y) = α1λ1(x, y) + α2λ2(x, y) + λ3(x, y),
where αiv(Ni) for i = 1, 2, 3.
Example:
@@@@@@
(0, 0) (1, 0)
(0, 1)s
ss T

3.5. INTERPOLATION 33
The basis functions are λ1(x, y) = 1− x− y, λ2(x, y) = x and λ3(x, y) = y.
Let Th be a triangulation of Ω, then we let
Vh := v ∈ C0(Ω)| ∀T ∈ Th : v|T ∈ P1(T ).
Functions in Vh are piecewise linear and continuous. We know that v ∈ Vh isuniquely determined by v(Ni)| i = 1, · · · , N. We let
φj(Ni) =
1 i = j
0 i 6= j
and let φj| 1 ≤ j ≤ N ⊂ Vh be a basis for Vh (’hat functions’), i.e.:
v(x, y) =N∑i=1
αiφi(x, y), αi = v(Ni), i = 1, · · · , N.
3.5 Interpolation
Given f ∈ C0(T ) on a single triangle with nodes Ni = (xi, yi), i = 1, 2, 3, we let
Π(f) :=3∑i=1
f(Ni)φi
in particular Π(f)(Ni) = f(Ni).
We want to estimate f − Π(f). Wirst we need to measure derivatives in 2D. Let
|Df | :=
(∣∣∣∣∂f∂x∣∣∣∣2 +
∣∣∣∣∂f∂y∣∣∣∣2) 1
2
|D2f | :=
(∣∣∣∣∂2f
∂2x
∣∣∣∣2 + 2
∣∣∣∣ ∂2f
∂x∂y
∣∣∣∣2 +
∣∣∣∣∂2f
∂2y
∣∣∣∣2) 1
2
and let ‖f‖L2(Ω) =(∫
Ω|f(x)|2 dx
) 12 .
Proposition 3.5.1. For f ∈ C2(T ), it holds:
‖f − Π(f)‖L2(T ) ≤ Ch2T‖D2f‖L2(T ),
‖D(f − Π(f))‖L2(T ) ≤ ChT‖D2f‖L2(T ),
where C is a generic constant independent of hT and f , but that depends on theratio between smallest and largest interior angle of the triangle T .

34 CHAPTER 3. LECTURES 5 AND 6
Proof. Not in this course.
Now, we consider the piecewise continuous interpolant Π(f) =∑N
i=1 f(Ni)φi.
Proposition 3.5.2. For f ∈ C0(Ω), with f ∈ C2(T ) for all T ∈ Th, it holds
‖f − Π(f)‖2L2(Ω) ≤ C
∑T∈Th
h4T‖D2f‖2
L2(T ),∑T∈Th
‖D(f − Π(f))‖2L2(T ) ≤ C
∑T∈Th
h2T‖D2f‖2
L2(T ),
where C is a generic constant independent of h and f , but that depends on theratio between smallest and largest interior angle of the triangles of Th.
Proof. An immediate consequence of Proposition 3.5.1.
3.6 L2-projection
Let Ph : L2(Ω)→ Vh be the L2-projection with Ph(f) ∈ Vh given s.t.∫Ω
(f − Ph(f))vh = 0 for all vh ∈ Vh. (3.6.1)
Linear system:
Problem (3.6.1) is equivalent to∫Ω
(f − Ph(f))φi = 0 for i = 1, · · · , N
and Ph(f) can be expressed as Ph(f) =∑N
i=1 ξiφi, where ξi (for i = 1, · · · , N) aregiven by the equation∫
Ω
fφi =
∫Ω
N∑i=1
ξiφiφj =N∑i=1
ξi
∫Ω
φiφj.
Let M ∈ RN×N and b ∈ RN be given by
Mi,j :=
∫Ω
φjφi for i, j = 1, · · ·N,
bi :=
∫Ω
fφi for i = 1, · · ·N.

3.7. EXISTENCE AND UNIQUENESS OF THE PROJECTION 35
This gives us∑N
j=1 ξjMi,j = bi for j = 1, · · · , N and leads to
Mξ = b.
Algorithm for L2-projection:
1. generate triangulation and Vh,
2. compute M and b,
3. solve Mξ = b,
4. set Ph(f) =∑N
i=1 ξφi.
3.7 Existence and uniqueness of the projection
Theorem 3.7.1.For any f ∈ L2(Ω) the L2-projection Ph(f) exists and is unique.
Proof. Uniqueness: assume Ph(f)1 and Ph(f)2 be two solutions with the L2-projection property. We obtain:∫
Ω
Ph(f)1vh =
∫Ω
fvh for all vh ∈ Vh,∫Ω
Ph(f)2vh =
∫Ω
fvh for all vh ∈ Vh.
This gives us ∫Ω
(Ph(f)1 − Ph(f)2)vh = 0 for all vh ∈ Vh.
Choosing vh = Ph(f)1 − Ph(f)2 gives us
‖Ph(f)1 − Ph(f)2‖L2(Ω) = 0
and therefore Ph(f)1 = Ph(f)2.
Existence: Ph(f) is given by a N ×N linear system Mx = b. We just saw
Mx = 0 ⇐⇒ x = 0,
but this implies that the kernel is zero and therefore we have existence for arbitraryright hand side b.

36 CHAPTER 3. LECTURES 5 AND 6
3.8 A priori error estimate
Theorem 3.8.1.Let f ∈ L2(Ω) and let Ph(f) be the L2-projection of f , then
‖f − Ph(f)‖ ≤ ‖f − vh‖ for all vh ∈ Vh.
Proof. As in 1D let f − Ph(f) = f − vh + vh − Ph(f) and observe
‖f − Ph(f)‖2 =
∫Ω
(f − Ph(f))(f − vh + vh − Ph(f))
=
∫Ω
(f − Ph(f))(f − vh) +
∫Ω
(f − Ph(f))(vh − Ph(f))
=
∫Ω
(f − Ph(f))(f − vh)
≤ ‖f − Ph(f)‖‖f − vh‖ for all vh ∈ Vh.
Theorem 3.8.2.For f ∈ C0(Ω), with f ∈ C2(T ) for all T ∈ Th, it holds
‖f − Ph(f)‖2L2(Ω) ≤ C
∑T∈Th
h4T‖D2f‖2
L2(T ),
with a generic constant C.
Proof. Use Theorem 3.8.1 and Proposition 3.5.2 to obtain:
‖f − Ph(f)‖2L2(Ω) ≤
∑T∈Th
‖f − Π(f)‖2L2(T ) ≤ C
∑T∈Th
h4T‖D2f‖2
L2(T ).

3.9. QUADRATURE AND NUMERICAL INTEGRATION 37
Theorem 3.8.3.The mass matrix M is symmetric and positive definite.
Proof. The symmetry is obvious by Mi,j = Mj,i. The positive definite property,i.e. xTMx > 0 for all x ∈ RN \ 0, can be verified by:
xTMx =N∑
i,j=1
xiMi,jxj =N∑
i,j=1
xixj
∫Ω
φiφj
=
∫Ω
(N∑i=1
xiφi
)(N∑i=j
xjφj
)
= ‖N∑i=1
xiφi‖2L2(Ω) ≥ 0,
where xTMx = 0 only if∑N
i=1 xiφi = 0, which is only the case if xi = 0 fori = 1, · · · , N .
3.9 Quadrature and numerical integration
In general∫Tf(x) dx ≈
∑j ωjf(qj)|T |, where the ωj’s denote the weights, the qj’s
the quadrature points and |T | the area.
Examples:
1. Midpoint rule:∫T
f(x) dx ≈ f(xT )|T |, with midpoint x =N1 +N2 +N3
3.
2. Corner rule:∫T
f(x) dx ≈3∑i
f(Ni)|T |3, with triangle corners Ni.
3. Gauss quadratures: Gauss quadratures are designed with general points andweights so that they are exact for polynomials of a given degree.

38 CHAPTER 3. LECTURES 5 AND 6
3.10 Implementation details
Assembly of mass matrix M with
Mi,j =
∫Ω
φjφi for i, j = 1, · · ·N.
Useful formula (without proof): let m,n, p ∈ N and let φT,1, φT,2 and φT,3 denotethe three basis functions that belong to the three corners of the triangle T . Thenit holds: ∫
T
φmT,1 φnT,2 φ
pT,3 =
2m!n! p!
(m+ n+ p+ 2)!|T |. (3.10.1)
Example:
sN1 = (0, 0)
sN2 = ( 3
4, 0)
sN3 = (1, 0)
sN4 = (1, 1)N5 = (0, 1)sT1
T2 T3
M =
∫Ω
φ1φ1 φ1φ2 φ1φ3 φ1φ4 φ1φ5
φ2φ1 φ2φ2 φ2φ3 φ2φ4 φ2φ5
φ3φ1 φ3φ2 φ3φ3 φ3φ4 φ3φ5
φ4φ1 φ4φ2 φ4φ3 φ4φ4 φ4φ5
φ5φ1 φ5φ2 φ5φ3 φ5φ4 φ5φ5
=∑T∈Th
∫T
φ1φ1 φ1φ2 φ1φ3 φ1φ4 φ1φ5
φ2φ1 φ2φ2 φ2φ3 φ2φ4 φ2φ5
φ3φ1 φ3φ2 φ3φ3 φ3φ4 φ3φ5
φ4φ1 φ4φ2 φ4φ3 φ4φ4 φ4φ5
φ5φ1 φ5φ2 φ5φ3 φ5φ4 φ5φ5
=
∫T1
φ1φ1 0 0 φ1φ4 φ1φ5
0 0 0 0 00 0 0 0 0
φ4φ1 0 0 φ4φ4 φ4φ5
φ5φ1 0 0 φ5φ4 φ5φ5
+
∫T2
φ1φ1 φ1φ2 0 φ1φ4 0φ2φ1 φ2φ2 0 φ2φ4 0
0 0 0 0 0φ4φ1 φ4φ2 0 φ4φ4 0
0 0 0 0 0
+
∫T3
0 0 0 0 00 φ2φ2 φ2φ3 φ2φ4 00 φ3φ2 φ3φ3 φ3φ4 00 φ4φ2 φ4φ3 φ4φ4 00 0 0 0 0
=: MT1 +MT2 +MT3 .

3.10. IMPLEMENTATION DETAILS 39
Using formula (3.10.1), we obtain∫T
φiφj =1
12(1 + δij)|T | for i, j = 1, 2, 3,
where δij = 1 for i = j and δij = 0 for i 6= j. This gives us
MTi =1
12
2 1 11 2 11 1 2
|Ti|Algorithm for Mass matrix
• Construct P and K matrices.
• Allocate memory for M (N ×N)
• for T ∈ Th:
MT =1
12
2 1 11 2 11 1 2
|T |M(T (1 : 3), T (1 : 3)) = M(T (1 : 3), T (1 : 3)) +MT .
end
Remark: ’M(T (1 : 3), T (1 : 3)) = M(T (1 : 3), T (1 : 3)) +MT ’ is Matlab notation.

40 CHAPTER 3. LECTURES 5 AND 6

Chapter 4
Lecture 7, 8 and 9
Finite Element Method in 2D
Summary:
• weak formulation,
• finite element method,
• error estimation,
• implementation,
• adaptivity.
4.1 Weak formulation
First, we derive the so called Green’s formula from the Divergence Theorem (StokesTheorem).
Let d = 1, 2, 3 and Ω ⊂ Rd be a bounded domain with Lipschitz-continuous bound-ary ∂Ω and unit outer normal n. The Divergence Theorem says:∫
Ω
∂f(x)
∂xidx =
∫∂Ω
f(x) · ni dσ(x), i = 1, .., d.
Let f = u · v for two sufficiently regular (i.e. H1(Ω)) functions u and v. Then weobtain:∫
Ω
(∂u
∂xi
)v dx = −
∫Ω
u
(∂v
∂xi
)dx+
∫∂Ω
u · v · ni dσ(x), i = 1, .., d.
41

42 CHAPTER 4. LECTURE 7, 8 AND 9
Now let u = wi be the components of a vector-valued function. We sum overi =, 1.., d and obtain:∫
Ω
(∇ · w) v dx =d∑i=1
∫Ω
(∂wi∂xi
)v dx
= −d∑i=1
∫Ω
wi
(∂v
∂xi
)dx+
∫∂Ω
wi · v · ni dσ(x)
= −∫
Ω
w · ∇v dx+
∫∂Ω
v w · n dσ(x).
Now let w = −a∇u for given functions a and u. We obtain:
−∫
Ω
(∇ · (a∇u)) v dx =
∫Ω
a∇u · ∇v dx−∫∂Ω
v (a∇u) · n dσ(x). (4.1.1)
For the special case a = 1, this formula is called Green’s formula.
General elliptic equation of second orderFind u s.t.
−∇ · (a∇u) + bu = f in Ω, (4.1.2)
a∇u · n = κ(g − u) on ∂Ω,
where a > 0, b ≥ 0, κ ≥ 0, f ∈ L2(Ω) and g ∈ C0(∂Ω).
We seek a weak solution in
V := H1(Ω) := v ∈ L2(Ω)| v has a weak derivative and ‖v‖L2(Ω) + ‖∇v‖L2(Ω) <∞.
In order to derive the weak formulation we multiply (4.1.2) with v ∈ V , integrateover Ω and use (4.1.1):∫
Ω
fv dx = −∫
Ω
∇ · (a∇u)v dx+
∫Ω
buv dx
=
∫Ω
a∇u∇v dx+
∫Ω
buv dx−∫∂Ω
n · a∇u v dσ(x)
=
∫Ω
a∇u∇v dx+
∫Ω
buv +
∫∂Ω
κ(u− g) v dσ(x).
We obtain the weak form: find u ∈ V s.t.∫Ω
a∇u∇v dx+
∫Ω
buv dx+
∫∂Ω
κu v dσ(x) =
∫Ω
fv dx+
∫∂Ω
κg v dσ(x) ∀v ∈ V.
(4.1.3)

4.2. FINITE ELEMENT METHOD 43
4.2 Finite Element Method
We can formulate the method as in the 1D case by using the weak formulation(4.1.3).
Definition 4.2.1 (Finite Element Method in 2D).Find uh ∈ Vh s.t.∫
Ω
a∇uh∇vh dx+
∫Ω
buhvh dx+
∫∂Ω
κuh vh dσ(x) (4.2.1)
=
∫Ω
fvh dx+
∫∂Ω
κg vh dσ(x) ∀vh ∈ Vh.
Implementation
Let a = 1 and b = g = 0. Then we have uh =∑N
i=1 ξiφi. We pick φj in (4.2.1) andobtain:
N∑i=1
ξi
(∫Ω
∇φi · ∇φj dx+
∫∂Ω
κφi φj dσ(x)
)=
∫Ω
fφj for 1 ≤ j ≤ N.
This gives us the system
(A+R) ξ = b, where
A ∈ RN×N , R ∈ RN×N and b ∈ RN are given by the entires
Ai,j :=
∫Ω
∇φj · ∇φi dx, Ri,j :=
∫∂Ω
κφi φj dσ(x),
bj :=
∫Ω
fφj, for 1 ≤ i, j ≤ N.
Assembly of the stiffness matrix
We can again identify the local contributions that come form a particular triangleT :
ATi,j :=
∫T
∇φi · ∇φj, for i, j = 1, 2, 3.

44 CHAPTER 4. LECTURE 7, 8 AND 9
@@
@@@
@@@
(x1, y1)
(x2, y2)
(x3, y3)
T
We have φi(x, y) = ai + bix + ciy, for i = 1, 2, 3. Let us denote αi := (ai, bi, ci).We know
φi(Nj) =
1 i = j
0 i 6= j,
which gives us
Bαi =
1 x1 y1
1 x2 y2
1 x3 y3
aibici
=
100
= ei.
In general we have Bαi = ei for i = 1, 2, 3. Furthermore, we obviously have
∇φi =
(bici
),
which gives
ATi,j = (bibj + cicj)|T | for i, j = 1, 2, 3.
AlgorithmLet N be the number of nodes and M the number of triangles.
1. Allocate memory for a N ×N matrix A.
2. For K ∈ Th:
Compute ∇φKi = (bi, ci)K for i = 1, 2, 3. Set
AK :=
(b21 + c2
1) (b1b2 + c1c2) (b1b3 + c1c3)(b2b1 + c2c1) (b2
2 + c22) (b2b3 + c2c3)
(b3b1 + c3c1) (b3b2 + c3c2) (b23 + c2
3)
|T |.

4.2. FINITE ELEMENT METHOD 45
Add A(T (1 : 3, K), T (1 : 3, K)) = A(T (1 : 3, K), T (1 : 3, K)) + AK .
end.
Assembly of boundary matrix
Let Γouth denote the set of boundary edges of the triangulation, i.e.
Γouth := E|E = T ∩ ∂Ω, for T ∈ Th.
Assume that κ is constant on E. For E ∈ Γouth , we define RE ∈ R2×2 by the entries
REi,j :=
∫E
κφiφj dσ(x) = κ1
6(1 + δi,j)|E|, for i, j = 1, 2,
where δi,j is 1 for i = j and 0 else.
In Matlab structure:
e =
nα1 nα2 nα3 · · · nαJnβ1 nβ2 nβ3 · · · nβJx1
x2
bnd10
|T |.
J denotes the number of boundary edges (boundary segments).
Algorithm
For j = 1, .., J :
Compute |E| given p(:, e(1 : 2, j)).
Evaluate κ in midpoint (if it is not constant).
R(e(1 : 2, j), e(1 : 2, j)) = R(e(1 : 2, j), e(1 : 2, j)) + κ6
(2 11 2
)|E|.
end.

46 CHAPTER 4. LECTURE 7, 8 AND 9
Assembly of Load Vector
We use a one-point quadrature rule for approximating the integral. We obtain forT ∈ Th:
bTj =
∫T
fφj ≈ f(Nj)|T |3, for j = 1, 2, 3.
Algorithm
For i = 1, ..,M :
Compute |K|.
b(t(1 : 3, i)) = b(t(1 : 3, i)) +
f(N i1)
f(N i2)
f(N i3)
|K|3
.
end.
Given A, R and b, we can solve
(A+R)ξ = b
and write uh =∑N
i=1 ξφi.
4.3 The Dirichlet Problem
Find u s.t.
−4u = f in Ω, (4.3.1)
u = g on ∂Ω.
We seek the (weak) solution in:
Vg := v ∈ V | v|∂Ω = g.
Multiplying (4.5.1) with a test function v ∈ V0 and integrating gives us:∫Ω
fv =
∫Ω
−4uv =
∫Ω
∇u · ∇v −∫∂Ω
(∇u · n)v =
∫Ω
∇u · ∇v.

4.4. THE NEUMANN PROBLEM 47
So the weak problem reads: find u ∈ Vg s.t.∫Ω
fv =
∫Ω
∇u · ∇v for all v ∈ V0.
Finite Element Method:
Assume that g is piecewise linear on ∂Ω with respect to the triangulation. Thenour FEM approximation is uh ∈ Vh,g := v ∈ Vh| v|∂Ω = g with∫
Ω
fvh =
∫Ω
∇uh · ∇vh for all v ∈ Vh,0.
Assume that we have N nodes and J boundary nodes, then the matrix formof the FEM problem reads:
A0,0 A0,g
Ag,0 Ag,g
N − J
J
N − J J
A0,0 A0,g
Ag,0 Ag,g
ξ0
ξ1
=
b0
b1
with A0,0 ∈ R(N−J)×(N−J), Ag,g ∈ RJ×J , A0,g ∈ R(N−J)×J and Ag,0 ∈ RJ×(N−J).Note that ξ ∈ RJ is known (it contains the values of g in the boundary nodes).We can therefore solve the simplified problem reading: find ξ0 ∈ R(N−J) with
A0,0ξ0 = b0 − A0,gξg.
In Matlab let int = 1 : N − J , bnd N − J + 1 : N .
A = A(int ,int ).b = b(int )− A(int ,bnd ) ∗ g.U(int )= A \ b, U(bnd )= g.
4.4 The Neumann Problem
Find u s.t.
−4u = f in Ω, (4.4.1)
∇u · n = g on ∂Ω.

48 CHAPTER 4. LECTURE 7, 8 AND 9
In order to guarantee solvability, we note that∫Ω
f · 1 +
∫∂Ω
g =
∫Ω
−4u · 1 +
∫∂Ω
(∇u · n)1 dσ(x) =
∫Ω
∇u · ∇1 = 0.
We therefore nee to assume the compatibility condition∫Ω
f · 1 +
∫∂Ω
g = 0.
to ensure that a solution can exist. Note that if u exists, it is only determined upto a constant, since u + c is a solution if u is a solution and c ∈ R. We thereforedefine the solution space:
V := v ∈ V |∫
Ω
v(x) dx = 0.
This space guarantees a unique weak solution (with weak formulation as usualwith test functions in V ). Numerically the zero-average can be realized via socalled Lagrange-multipliers.
4.5 Elliptic Problems with a Convection Term
Find u s.t.
−∇ · (a∇u) + b · ∇u+ cu = f in Ω, (4.5.1)
u = 0 on ∂Ω.
Weak formulation: find u ∈ V0 := v ∈ V | v|∂Ω = 0 s.t.∫Ω
a∇u · ∇v +
∫Ω
(b · ∇u)v +
∫Ω
c u · v =
∫Ω
fv for all v ∈ V0.
The FEM approximation is given by uh ∈ Vh,0 := vh ∈ Vh| (vh)|∂Ω = 0 solving∫Ω
a∇uh · ∇vh +
∫Ω
(b · ∇uh)vh +
∫Ω
c uh · vh =
∫Ω
fvh for all vh ∈ Vh,0.
With the ansatz uh =∑N
j=1 ξjφj and v = φi in the weak formulation, we get
N∑j=1
ξj
(∫Ω
a∇φj · ∇φi +
∫Ω
(b · ∇φj)φi +
∫Ω
c φj · φi)
=
∫Ω
fφi for 1 ≤ i ≤ N.

4.6. EIGENVALUE PROBLEM 49
Let therefore A,B,C ∈ RN×N , R ∈ RN×N be given by the entires
Ai,j :=
∫Ω
a∇φi · ∇φj dx, Bi,j :=
∫Ω
(b · ∇φi) · φj dx,
Ci,j :=
∫Ω
cφiφj dx, Fj :=
∫Ω
fφj, for 1 ≤ i, j ≤ N.
We solve
(A+B + C)ξ = F.
Note that B is not symmetric, i.e.
Bi,j =
∫Ω
(b · ∇φi) · φj dx 6=∫
Ω
(b · ∇φj) · φi dx = Bj,i.
4.6 Eigenvalue Problem
Find λ ∈ R and u s.t.
−4u = λu in Ω, (4.6.1)
∇u · n = 0 on ∂Ω.
Weak formulation: we multiply the equation with a test function v ∈ V andintegrate over Ω to obtain:
−∫
Ω
∇u · ∇v = λ
∫Ω
uv for all v ∈ V.
The FEM approximation is given by uh ∈ Vh and Λ ∈ R s.t.
−∫
Ω
∇uh · ∇vh = Λ
∫Ω
uhvh for all vh ∈ Vh.
This leads to an algebraic system of the structure
Aξ = ΛMξ,
i.e. an algebraic eigenvalue problem. In Matlab egg or digs can be used.

50 CHAPTER 4. LECTURE 7, 8 AND 9
4.7 Error analysis and adaptivity
Model problem: find u s.t.
−4u = f in Ω,
u = 0 on ∂Ω.
Weak solution: find u ∈ V0 s.t.∫Ω
∇u · ∇v =
∫Ω
fv for all v ∈ V0.
FEM approximation: find uh ∈ Vh,0 with∫Ω
∇uh · ∇vh =
∫Ω
fvh for all v ∈ Vh,0.
Linear system of equations
We choose v = φi, with i = 1, .., N , where span(φiNi=1) = Vh,0. Now, find
uh =∑N
i=1 ξiφi s.t.:
N∑i=1
ξi
(∫Ω
∇φi · ∇φj dx)
=
∫Ω
fφj for 1 ≤ j ≤ N.
This gives us the system
Aξ = b,
where A ∈ RN×N and b ∈ RN are given by the entires
Ai,j :=
∫Ω
∇φi · ∇φj dx, bj :=
∫Ω
fφj, for 1 ≤ i, j ≤ N.
Theorem 4.7.1.The stiffness matrix A is symmetric and positive definite.

4.7. ERROR ANALYSIS AND ADAPTIVITY 51
Proof. The symmetry of A is trivial.
xTAx =N∑i=1
N∑j=1
xiAijxj =N∑i=1
xixj
∫Ω
∇φi · ∇φj
=
∫Ω
(N∑i=1
xi∇φi
)·
(N∑j=1
xj∇φj
)=
∫Ω
∇
(N∑i=1
xiφi
)· ∇
(N∑j=1
xjφj
)
= |∇
(N∑i=1
xiφi
)|2 ≥ 0,
where equality holds only for x = 0, since we are in Vh,0.
A priori error bound
Theorem 4.7.2.Let u ∈ V0 denote the weak solution and uh ∈ Vh,0 the corresponding FEM approx-imation. It holds: ∫
Ω
∇(u− uh) · ∇vh = 0 for all vh ∈ Vh,0. (4.7.1)
Proof. By definition of weak solution and FEM approximation we get∫Ω
∇u · ∇v =
∫Ω
fv for all v ∈ Vh,0 ⊂ V0,∫Ω
∇uh · ∇vh =
∫Ω
fvh for all vh ∈ Vh,0.
Subtracting both equations gives the result.
Now let |||v|||2 :=∫
Ω∇v · ∇v be the energy norm on V0. Note that 0 is the
only constant in V0.
Theorem 4.7.3.Let u ∈ V0 denote the weak solution and uh ∈ Vh,0 the corresponding FEM approx-imation. It holds:
|||u− uh||| ≤ |||u− vh||| for all vh ∈ Vh,0.

52 CHAPTER 4. LECTURE 7, 8 AND 9
Proof. We get for arbitrary vh ∈ Vh,0:
|||u− uh|||2 =
∫Ω
∇(u− uh) · ∇(u− uh)
(4.7.1)=
∫Ω
∇(u− uh) · ∇(u− vh)C.S.≤ ‖|u− uh‖|‖|u− vh‖|.
Theorem 4.7.4.Let u ∈ V0 denote the weak solution and uh ∈ Vh,0 the corresponding FEM approx-imation. If u ∈ C2(Ω) it holds:
|||u− uh|||2 ≤ C∑T∈Th
h2T‖D2u‖2
L2(T ),
where C is independent of hT and u.
Proof. Let v = Π(u) ∈ Vh,0 in Theorem 4.7.3. By the interpolation estimates forΠ we obtain
|||u− uh||| ≤ |||u− Π(u)||| =∑T∈Th
||D(u− Π(u))||2L2(T ) ≤ C∑T∈Th
h2T‖D2u‖2
L2(T ).
Note that uh → u for h→ 0. This means |||u− uh||| ∼ h.
Adaptive Finite Element Methods
Preliminary results:
There exists an interpolation operator Π (Clement-type interpolation) mapping toVh,0, that fulfills the interpolation bound:
‖v − Π(v)‖L2(T ) ≤ ChT‖Dv‖L2(ωT ),
where ωT :=⋃K ∈ Th|T ∩K 6= ∅ and C is constant that is independent of hT
and v.

4.7. ERROR ANALYSIS AND ADAPTIVITY 53
Trace inequality:
‖v − Π(v)‖L2(∂T ) ≤ Ch12T‖Dv‖L2(ωT ),
where C is again a generic constant.
Jump of functions: let vh ∈ Vh be piecewise linear, then
[n · ∇vh]∂T1∩∂T2 := nT1 · (∇vh)|T1 + nT2 · (∇vh)|T2 .
Observe that nT1 = −nT2 on ∂T1 ∩ ∂T2.
@@@@@@@@
@@@
@@@
@@
T1 T2
- nT1
nT2
(∇vh)|T1(∇vh)|T2
Theorem 4.7.5 (A posteriori error estimate).It holds
|||u− uh|||2 ≤ C∑T∈Th
RT (uh)2,
where C is a (computable) constant that is independent of hT and
RT (uh)2 := h2
T‖f +4uh‖2L2(T ) +
1
4hT‖[n · ∇uh]‖2
L2(∂T\∂Ω).

54 CHAPTER 4. LECTURE 7, 8 AND 9
Proof. Let e := u− uh. We get:
|||e|||2 =
∫Ω
∇e · ∇e =
∫Ω
∇e · ∇(e− Π(e))
=∑T∈Th
∫T
∇e · ∇(e− Π(e))
(4.1.1)=
∑T∈Th
∫T
4e (e− Π(e)) +∑T∈Th
∫∂T\∂Ω
(n · ∇e)(e− Π(e)) dσ(x)
=∑T∈Th
∫T
(f +4uh) (e− Π(e)) +∑T∈Th
∫∂T\∂Ω
(n · ∇e)(e− Π(e)) dσ(x).
Note that ∑T∈Th
∫∂T\∂Ω
(n · ∇u)(e− Π(e)) dσ(x) = 0
since [n · ∇u] = 0 because of u ∈ C2. We conclude
|||e|||2 =∑T∈Th
∫T
(f +4uh) (e− Π(e))︸ ︷︷ ︸=:I
−∑T∈Th
∫∂T\∂Ω
(n · ∇uh)(e− Π(e)) dσ(x)︸ ︷︷ ︸=:II
.
Let Γh denote the set of interior edges, i.e.
Γh := E := T ∩K|T,K ∈ Th, and E contains more than one point.
We start with estimating II:
II = −∑T∈Th
∫∂T\∂Ω
(n · ∇uh)(e− Π(e)) dσ(x)
=∑E∈Γh
∫E
[n · ∇uh](e− Π(e)) dσ(x)
=1
2
∑T∈Th
∫∂T\∂Ω
[n · ∇uh](e− Π(e)) dσ(x)
≤ 1
2
∑T∈Th
‖[n · ∇uh]‖L2(∂T\∂Ω)‖e− Π(e)‖L2(∂T\∂Ω)
≤ C∑T∈Th
1
2‖[n · ∇uh]‖L2(∂T\∂Ω)h
12T‖∇e‖L2(ωT )
≤ C
(∑T∈Th
hT4‖[n · ∇uh]‖2
L2(∂T\∂Ω)
) 12
|||e|||.

4.7. ERROR ANALYSIS AND ADAPTIVITY 55
Next, we deal with I:
I =∑T∈Th
∫T
(f +4uh) (e− Π(e))
≤ C∑T∈Th
hT‖f +4uh‖L2(T )‖∇e‖L2(T )
≤ C
(∑T∈Th
h2T‖f +4uh‖2
L2(T )
) 12
|||e|||.
Combining both estimates yields
|||e|||2 ≤ C
(∑T∈Th
h2T‖f +4uh‖2
L2(T ) +∑T∈Th
hT4‖[n · ∇uh]‖2
L2(∂T\∂Ω)
).
Adaptive algorithm
We want to refine the mesh where RT (uh) is large. Main difficulties are:
• no hanging nodes,
• ’good quality’ triangulations (e.g. avoid very small angles in the triangles).
There are several algorithms including
∗ Rivara refinement (largest edge),
∗ regular refinment.
A combination is used in Matlab.
Alg.:
1. Construct initial mesh Th.
2. Solve finite element problem for uh.
3. Compute local indicators RT (uh)2.
4. Compute maximum m := maxT∈Th RT (uh)2.
5. Mark elements with error over γ ·m, where 0 < γ < 1 is a fixed parameter.

56 CHAPTER 4. LECTURE 7, 8 AND 9
6. Refine elements and get new mesh Th.
7. Return to step 2) (stop when N becomes too large or when the error∑T∈Th RT (uh)
2 is small enough)
Matlab syntax
Regard problems of the type
−∇ · (a∇u) + cu = f.
Step 3: indicator =pdejmps(p, t, a, c, f, uh, 1, 1, 1), the last three numbers stand for
the weighting constants c1 and c122 and m in hmT .
Step 6: [p, e, t] =refinemesh(geom, p, e, t, index). Here tol = γ ∗ max(indicator)and index =find(indicator > tol).

Chapter 5
Lecture 10
Time dependent problems
Summary:
• Numerical methods for ODEs
• Heat equation
– Weak form
– FEM
– Implementation
• Wave equation
– Weak form
– FEM
– Implementation
5.1 Systems of Ordinary Differential Equations
Problem: find ξ(t) ∈ RN so that
M.ξ(t) + A(t)ξ(t) = f(t), t ∈ (0, T ]
ξ(0) = ξ0,
where M is constant and only A and f are time-dependent.
57

58 CHAPTER 5. LECTURE 10
Let 0 = t0 < t1 < t2 < ... < tL = T be a discretization, let kn := tn − tn−1
for n = 1, ..., L be the time step size and let ξn ≈ ξ(tn) for n = 1, ..., L denotecorresponding approximations. We integrate in time to obtain∫ tn
tn−1
M.ξ(t) dt+
∫ tn
tn−1
A(t)ξ(t) dt =
∫ tn
tn−1
f(t) dt.
This yields
M(ξ(tn)− ξ(tn−1)) +
∫ tn
tn−1
A(t)ξ(t) dt =
∫ tn
tn−1
f(t) dt.
We can approximate this with the Euler scheme:
Backward Euler
M(ξn − ξn−1) + knA(tn)ξn = knf(tn)
or equivalently
Mξn − ξn−1
kn+ Anξ
n = fn
with An := A(tn) and fn := f(tn).
Algorithm
• Set 0 = t0 < t1 < ...tL = T .
• Let ξ0 = ξ(0). For n = 1, ..., L
solve (M + knAn)ξn = Mξn−1 + knfn,
end.
Alternative Schemes
• Backward Euler: (M + knAn)ξn = Mξn−1 + knfn.
• Forward Euler: Mξn = Mξn−1 − knAn−1ξn−1 + knfn−1.

5.2. HEAT EQUATION 59
• Crank-Nicolson: (M + kn2An)ξn = (M − kn
2An−1)ξn−1 + kn
2(fn + fn−1),
here ∫ tn
tn−1
A(t)ξ(t) dt ≈ Anξnkn2
+ An−1ξn−1kn−1
2,∫ tn
tn−1
f(t) dt ≈ kn2
(fn + fn−1).
5.2 Heat equation
Find u = u(x, t) s.t.
.u−4u = f in Ω ⊂ R2, t ∈ (0, T ),
u(·, t) = 0 on ∂Ω and t ∈ (0, T ],
u(x, 0) = u0 for x ∈ Ω.
Let V0 := v| ‖v‖+‖∇v‖ <∞, v|∂Ω = 0. Multiplying the heat equation withv ∈ V and integrating over Ω yields∫
Ω
fv =
∫Ω
.uv −
∫Ω
4u · v =
∫Ω
.uv +
∫Ω
∇u · ∇v
for 0 < t < T . The weak form therefore reads: find u(t) ∈ V0 s.t. for all t > 0∫Ω
.uv +
∫Ω
∇u · ∇v =
∫Ω
fv for all v ∈ V0.
FEM
Find uh(t) ∈ Vh,0 s.t. for all t > 0∫Ω
.uhvh +
∫Ω
∇uh · ∇vh =
∫Ω
fvh for all vh ∈ Vh,0.
Let uh(t) =∑N
i=1 ξi(t)φi(x). Choosing vh = φj in the FEM formulation, we obtain:
N∑i=1
.ξi
∫Ω
φiφj +N∑i=1
ξi
∫Ω
∇φi · ∇φj =
∫Ω
fφj for 1 ≤ j ≤ N.
Note that
ξ(t) =
ξ1(t)...
ξN(t)
=
uh(x1, t)...
uh(xN , t)
,

60 CHAPTER 5. LECTURE 10
where xi denotes the node that belongs to the basis function φi.
Let A,M ∈ RN×N and b(t) ∈ RN be given by the entries
Mi,j :=
∫Ω
φjφi, Ai,j :=
∫Ω
∇φj · ∇φi for i, j = 1, · · ·N,
bi :=
∫Ω
fφi for i = 1, · · ·N,
then we obtain the system
M.ξ(t) + Aξ(t) = b(t),
which we can e.g. solve with the Backward Euler method.
Algorithm:
Assume that only b is time-dependent (if it is not time-dependent, move its com-putation outside of the loop over n).
• Construct mesh and Vh,0.
• Compute M and A.
• Let ξ0 = ξ(0).
• For n = 1, ..., L
compute bn,
solve (M + knA)ξn = Mξn−1 + knbn,
(uh)n :=∑N
i=1 ξni φi,
end.
For ξ0 we can either use
ξ0 :=
ξ1(0)...
ξN(0)
=
u0(x1)...
u0(xN)
,
or we can let ξ0 to be the L2-projection of u0. We set (uh)0 :=∑N
i=1 ξ0i φi.

5.3. WAVE EQUATION 61
Remark 5.2.1 (Stability).There hold continuous and discrete stability estimates:
‖u(·, t)‖ ≤ ‖u(·, 0)‖+
∫ t
0
‖f(·, s)‖ ds,
‖(uh)n‖ ≤ ‖(uh)n−1‖+ kn‖fn‖ ≤ ‖(uh)0‖+n∑i=1
ki‖fi‖.
5.3 Wave equation
Find u = u(x, t) s.t.
..u−∇ · (ε∇u) = f in Ω ⊂ R2, t ∈ (0, T ),
n · ∇u(·, t) = 0 on ∂Ω and t ∈ (0, T ],
u(x, 0) = u0 for x ∈ Ω,.u(x, 0) = v0 for x ∈ Ω,
where ε = ε(x, t) and f = f(x, t).
Weak form
Let V := v| ‖v‖ + ‖∇v‖ < ∞. Multiplying the wave equation with v ∈ V andintegrating over Ω yields with the Green’s formula∫
Ω
fv =
∫Ω
..uv −
∫Ω
∇ · (ε∇u)u · v =
∫Ω
..uv +
∫Ω
ε∇u · ∇v −∫∂Ω
(ε∇u · n)v.
for 0 < t < T . The weak form therefore reads: find u(t) ∈ V s.t. for all t > 0∫Ω
..uv +
∫Ω
ε∇u · ∇v =
∫Ω
fv for all v ∈ V.
FEM - semi-discrete
Find uh(t) ∈ Vh s.t. for all t > 0∫Ω
..uhvh +
∫Ω
ε∇uh · ∇vh =
∫Ω
fvh for all vh ∈ Vh.

62 CHAPTER 5. LECTURE 10
We let uh(x, t) =∑N
j=1 ξj(t)φj(x), where
ξ(t) =
ξ1(t)...
ξN(t)
=
uh(x1, t)...
uh(xN , t)
.
This leads to
N∑i=1
..ξi
∫Ω
φiφj +N∑i=1
ξi
∫Ω
∇φi · ∇φj =
∫Ω
fφj for 1 ≤ j ≤ N.
We obtain the system
M..ξ(t) + Aξ(t) = b(t) for 0 < t < T,
where M denotes the mass matrix and A the stiffness matrix.
FEM - time discretization
We transform the problem into a first order system. Let therefore η(t) :=.ξ(t) and
consider the new coupled system:
M.ξ(t) = Mη(t), for 0 < t < T,
M.η(t) + A(t)ξ(t) = b(t), for 0 < t < T.
The application of the Crank-Nicholson scheme gives for n > 0:
Mξn − ξn−1
kn= M
ηn + ηn−1
2,
Mηn − ηn−1
kn+Anξ
n + An−1ξn−1
2=bn + bn−1
2.
In matrix form we get:(M −kn
2M
kn2An M
)︸ ︷︷ ︸
=:Wn
(ξn
ηn
)=
(M kn
2M
−kn2An−1 M
)(ξn−1
ηn−1
)+
(0
kn2
(bn + bn−1)
)︸ ︷︷ ︸
=:wn
.
Algorithm: Crank-Nicolson for the wave equation:
• Construct mesh and Vh,0.
• Compute M .

5.3. WAVE EQUATION 63
• Choose ξ0 = ξ(0) and η0 = η(0)
• For n = 1, ..., L
compute An and bn,
solve
Wn
(ξn
ηn
)= wn.
(uh)n :=∑N
i=1 ξni φi,
end.
Remark 5.3.1 (Conservation of mass).Let f = 0 and ε = 1, then
‖.u(·, t)‖2 + ‖∇u(·, t)‖2 = C,
where C is independent of t