
Lecture I: Introduction, Basic Mechanics 1 - Uni Ulm … · Lecture I: Introduction, Basic...
48
Computational Biomechanics 2016 Lecture I: Introduction, Basic Mechanics 1 Ulli Simon, Frank Niemeyer, Martin Pietsch Scientific Computing Centre Ulm, UZWR Ulm University
Transcript of Lecture I: Introduction, Basic Mechanics 1 - Uni Ulm … · Lecture I: Introduction, Basic...
Computational Biomechanics 2016
Lecture I:
Introduction,
Basic Mechanics 1
Ulli Simon, Frank Niemeyer, Martin Pietsch
Scientific Computing Centre Ulm, UZWR Ulm University

Scientific Computing
Centre Ulm
www.uzwr.de
• Rerun
• Lecture times
• Exam
• Max. 12 students
0 Organisation

Computational
Biomechanics
Biology
Mechanics
1 General Information
Computational
Biomechanics: Solving biological questions using methods of
mechanical engineering (Technische Mechanik), incl.
experiments.
Mechanobiology: Reaction of biological structures on mechanical
signals. Mechanotransduction: Melekular cell reaction.

Research Fields
Orthopadic Biomechanics: Bone-implant contact,
fracture healing, (artificial) joints,
musculoskeletal systems, …
Dental Biomechanics: Dental implants, orthodontics,
dental movements, braces, brackets, …
Cell Biomechanics: Cell experiments (cell gym) and
simulations to study mechenotransduction
Fluid Biomechanics: Respiratory systems, blood
flow, heart, …
Sport Biomechanics: Optimizing performance,
techniques and equipment of competitive
sports
Tree Biomechanics, Traffic Safety, Accident
Research, …

Numerical Methods
Boundary Value Problems: Finite Elements, static structural
analyses, displacements, stresses strains,
Initial Value Problems: Dynamics, musculoskeletal systems,
movements, Inverse Problem: Calculating muscle forces
from measured movements
Multiscale Modeling: To handle higly complex systems
Model Reduction: dito
Fuzzy Logic: Fracture healing in Ulm

Contents

Appetizer:
Simulation of Bone Healing

Computermodell für die Knochenheilung

Introduction: Bone Healing
Healing process
Mechanical situation Local Blood supply
Rhinelander (1968)*
*) From Bone in Clinical Orthopedics
by permission of AO Publishing.

Osteonal healing Callus healing Non-union
Intramem-
braneous bone
formation
Havers
ian
rem
od
eli
ng
Endochodral
ossification Fibrocartilage
Inte
rfra
gm
en
tary
Mo
ve
me
nt

QuickTime™ und der
Foto-CD-Dekompressor
werden benötigt, um dieses Bild zu sehen.
Animal Experiments
• Sheep methatarsus
• Fixateur exteren
• Gap sizes: 1, 2, 6 mm
• Interfrag. Strain: 7%, 31%

Exp. Results: Callus Area
0
50
100
150
200
250
300
ca
llu
s a
rea
(m
m2
)
7%
31%
1 Gap size (mm) 1 2 6

Introduction: Callus Healing Process
New bone formation only
with low strain state !
Biological Solution:
1.Callus: larger diameter
2.Via cartilage to bone

Wirklichkeit Modell

Geometry: • Idealized osteotomy (sheep)
• 2D, axi-symmetric
• Predescribed, fixed healing area
Discretization: • 3.000 el.
Material properties:
Load / Boundary conditions (Claes 97): Case A: Initial movement = 0.25 mm
Case B: Initial movement = 1.30 mm
Tissue type Modul Poisson ratio
Cortical bone 10,000 MPa 0.36
Woven bone 4,000 MPa 0.36
Fibro cartilage 200 MPa 0.45
Connective tissue 3 MPa 0.30
Methods: Finite Element Model
F
Exte
rna
l fixa
tor
Callus
Cortex
Lo
ng
bo
ne
axis

Seperation
0
250
500
750
0 0.2 0.4 0.6 0.8 1 1.2 1.4
Interfragmentary movement u in mm
Lo
ad
F in N
F_Fix
F_ges
•F
•Exte
rna
l fixa
tor
•Callus
•Cortex
•Lo
ng b
on
e a
xis
• •u
• FEA of linera part: callus
from unit displacement uunit
• Calculation of callus stiffness
• Calculation of F(u)
• Using inverse u(F) to find uactual
• Scale callus strains with uactual /uunit
uact

Finite Element
Connective tissue Cartilage Woven bone
Blood Perfusion
Methods: Tissue Mixture
Rule of Mixture
Constraint
Resultant State Variables
0 ≤ ci ≤ 1
Volumetric Tissue Concentrations
Perfusion Index

Tim
e
Results Data of the healing process
FE Analysis Strain distribution
Fuzzy Logic Tissue differentiation and vascularization
Start Configuration Geometry, mesh, load, initial state
Blood
Methods: Iterative Algorithm
Initial Conditions
Boundary
Conditions

Methods: Tissue Healing with Fuzzy Logic
Fuzzy Controler with linguistic rules
Vasc. adjacent
Bone concentration
Change of
Vascularity
Input variables Output variables
dilatational strain
distortional strain
Vascularity
Bone conc. adjacent
Change of
cartilage concentr.
Cartilage concentr.
Change of
bone concentration

Tissue Transformation Function
Strain in %
Hydr.Stress in MPa
Connective Tiss.
or
Fibrocartilage
Endochondr.
Ossification
-0.15 0.15
15
5
-5
-15
Intramembr..
Ossification
Claes and Heigele 99
Cartilage
Dis
tort
iona
l str
ain
Connective
Tissue
Intramembr.
Oss.
Dilatational strain
Simon et al. 2011
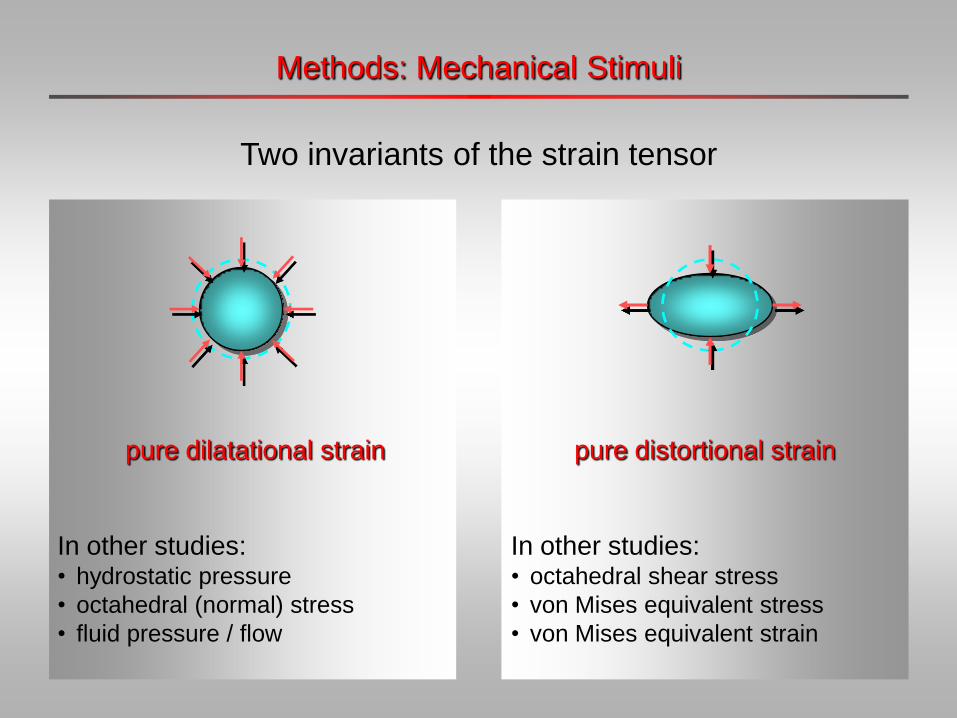
pure distortional strain
In other studies: • octahedral shear stress
• von Mises equivalent stress
• von Mises equivalent strain
pure dilatational strain
In other studies: • hydrostatic pressure
• octahedral (normal) stress
• fluid pressure / flow
Methods: Mechanical Stimuli
Two invariants of the strain tensor

Processes:
• Angiogenesis
• Intramembranous ossification
• Chondrogenesis
• Cartilage calcification
• Endochondral ossification
• Tissue destruction
Chondro-
genesis
Connective tissue
Cartilage
Bone
destruction
Cartilage
destruction
Intra-
membranous
ossification
Woven bone
Endochondral
ossification
Example: Rule #3, Intramembranous ossification: IF (blood supply is high) AND (bone concentration adjacent is
high) AND (dilatational strain is neg. low or pos. low) AND
(distortional strain is low)
THEN (bone concentration has to increase)
Methods: Fuzzy Rules

0
0,5
1
0,0001 0,001 0,01 0,1 1
distortional strain
pro
ba
bilit
y
Methods: Membership Functions
low medium high
Example: One of 10 membership functions
destructive

Zugehörigkeitsfunktionen für Eingangsgrößen
30 70
0
0,5
1
0 20 40 60 80 100
Blood perfusion, cartilage or bone concentration in %
Me
mb
ers
hip
Mem
bers
hip
Blood perfusion, cartilage or bone concentration in %
medium high low
-0,02 0,02
0
0,5
1
-0,12 -0,09 -0,06 -0,03 0 0,03 0,06 0,09 0,12
dilatational strain
me
mb
ers
hip
-0,85 -0,020,02 0,85
0
0,5
1
-1,2 -0,8 -0,4 0 0,4 0,8 1,2
dilatational strain
me
mb
ers
hip
-0,85 -0,020,02 0,85
0
0,5
1
-1,2 -0,8 -0,4 0 0,4 0,8 1,2
dilatational strain
me
mb
ers
hip
-0,85-0,020,020,85 5-5
0
0,5
1
-8 -6 -4 -2 0 2 4 6 8
dilatational strain
me
mb
ers
hip
-0,85-0,020,020,85 5-5
0
0,5
1
-8 -6 -4 -2 0 2 4 6 8
dilatational strain
me
mb
ers
hip
Mem
bers
hip
Dilatational strain ε0 in %
+medium +destructive about zero +low -destructive -medium -low
a)
0,03
0
0,5
1
0 0,05 0,1 0,15 0,2 0,25 0,3
distortional strain in %
pro
ba
bili
ty
0,03 7 16
0
0,5
1
-5 0 5 10 15 20
distortional strain in %
pro
ba
bili
ty
medium destructive about zero low
Distortional strain γ0 in %
Mem
bers
hip
b) c)

Zugehörigkeitsfunktionen für Ausgangsgrößen
-5 5
0
0.5
1
-30 -20 -10 0 10 20 30
Change in blood perfusion in %
Me
mb
ers
hip
stay increase decrease
a)
Mem
bers
hip
Change in blood perfusion in %
-2.5 2.5
0
0.5
1
-30 -20 -10 0 10 20 30
Change in cartilage concentration in %
Me
mb
ers
hip
stay increase decrease
b)
Mem
bers
hip
Change in cartilage concentration in %
-15 15
0
0.5
1
-30 -20 -10 0 10 20 30
Change in bone concentration in %
Me
mb
ers
hip
stay unchanged increase decrease
c)
Mem
bers
hip
Change in bone concentration in %

Case B Large initial movement 1.25 mm
Case A Small initial movement 0.25 mm
Results
Blood Bone Cartilage Blood Bone Cartilage
Day
0
Day
7
Day
14
Day
21
Day
28
Day
35
Day
42
Day
49
Day
56
Day
63

Case B Large initial movement 1.25 mm
Case A Small initial movement 0.25 mm
Results: Interfragmentary Movement
0.00
0.25
0.50
0.75
1.00
1.25
1.50
0 7 14 21 28 35 42 49 56
Healing days
IFM
in
mm
1032
1044
1057
1100
FE
0.00
0.25
0.50
0.75
1.00
1.25
1.50
0 7 14 21 28 35 42 49 56
Healing days
IFM
in
mm
1030
1054
1063
1129
FE
Animal experiments: Claes, et al. 97

Shear movement Axial movement
Simulation of 3D bone healing under axial and shear movement

Tag 17
Tag 25
Tag 40
Tag 42
Tag 50
3D Stiffness Directions
Axial Shear

Simon et al., DGfB, Münster 2009
Healing + Remodeling
Day 95
Day 58 Day 20
Day 20
Day 200
Day 200
Remodeling
Healing

Optimal Implant Stiffness?
Fracture Healing Model
“Complex Functional”
Implant
Properties (Stiffness)
Healing time
Optimization Algorithm
Bridge Detector
Implant stiffness
Hea
ling t
ime

Complex Fracture Geometry
Wehner et al., Clin Biom 2010

IFM (mm)
0.15
3.00
…
…
Day 1 15 30 50 70 90 200+
Cortex Distraction
Load
Distraction Osteogenesis


1.3 Variables, Dimensions and Units
Standard: ISO 31, DIN 1313
Variable = Number Unit
Length L = 2 m = 2 m
{Variable} = Number
[Variable] = Unit
Three mechanical SI-Units:
m (Meter)
kg (Kilogram)
s (Seconds)
Length L [m]
Length L / m
Length L in m
2 1
Tem
pera
ture

Note to Remember:
„A force is the cause of acceleration or
deformation of a body”
Newton’s 2nd Law [Axiom]:
Force = Mass times Acceleration or F = m a
• We all believe to know what a force is.
• But, force is an invention not a discovery!
• … it can not be measured directly.
2.1 Force
2 STATICS OF RIGID BODIES
F F

... with arrows
Forces are Vectors with
Magnitude
Direction
Sense of Direction
Representation of Forces
5 N
Line of action
Screw

Units of Force
Newton
N = kgm/s2
1 N
Note to Remember:
1 Newton Weight of a bar of chocolate (100 g)
FG = mg = 0,1 kg 9,81 m/s2
= 0,981 kg m/s2
1 N

2.2 Method of Sections (Euler) [Schnittprinzip]
Note to Remember:
First, cut the system, then include forces and moments.
Free-body diagram = completely isolated part.
Free-Body Diagramm (FBD) [Freikörper-Bild]
Leonhard Euler, 1707 - 1783
1 kg
F
F
Freikörperbild
10 N

Cut through bone (2D)
Cut through joint (2D)
2.2 Method of Sections

2.3 Combining and Decomposing Forces
Summation of Magnitudes
Subtraction of Magnitudes
Decomposition into Components
Vector Addition
8 N
2 N
FR 7 N
Ftrans
Faxial
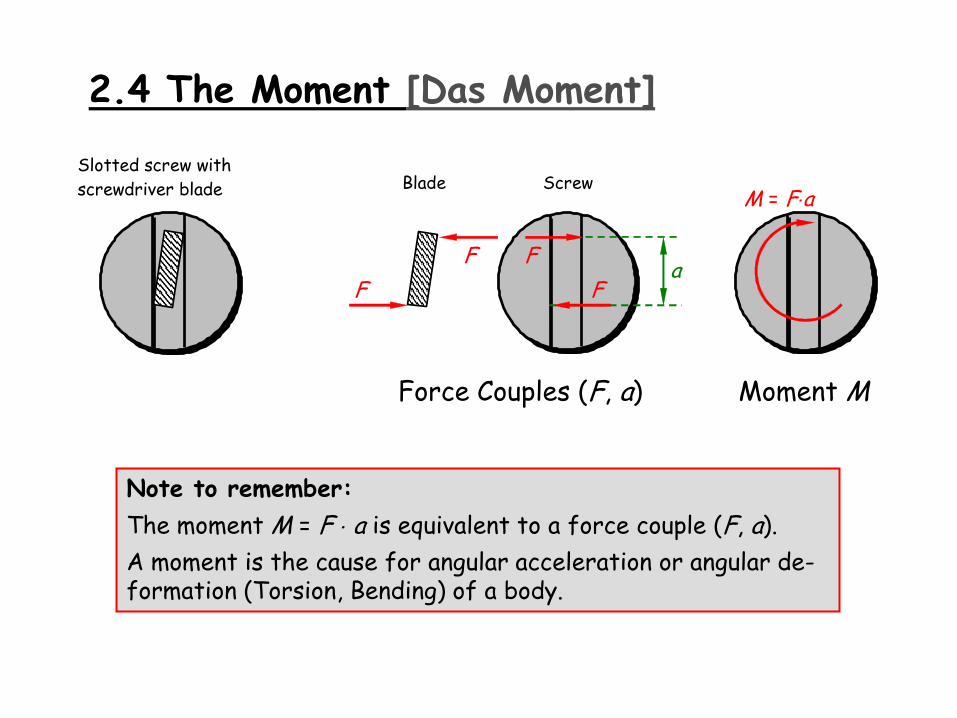
2.4 The Moment [Das Moment]
Note to remember:
The moment M = F a is equivalent to a force couple (F, a).
A moment is the cause for angular acceleration or angular de-formation (Torsion, Bending) of a body.
Screw Blade
Slotted screw with
screwdriver blade M = Fa
Force Couples (F, a) Moment M
F
F a
F
F

Units for Moment
Newton-Meter
Nm = kgm2/s2
Representation of Moments
... with rotation arrows or double arrows
Moments are Vectors with ...
Magnitude
Direction
Sense of Direction
Rechte-Hand-Regel:
5 Nm
Achse
Drehpfeil
5 Nm
Doppelpfeil
oder

2.5 Moment of a Force about a Point [Versetzungsmoment]
Note to Remember:
Moment = Force times lever-arm
F
P
P M = Fh
F
F
h P
P M
Faxial
Fquer
F
F
„Versetzungsmoment“

2.7 Static Equilibrium
Important:
Free-body diagram (FBD) first, then equilibrium!
For 2D Problems max. 3 equations for each FBD:
(For 3D Problems max. 6 equations for each FBD)
F
F
10 N
Free-body diagram
(FBD)
The sum of all forces in x-direction equals zero:
The sum of all forces in y-direction equals zero:
The sum of Moments with respect to P equals zero:
0...!
,2,1 yy FF
0...!
,2,1 P
z
P
z MM
0...!
,2,1 xx FF

.0...:P toresp. w.moments all of Sum
,0...:direction-yin forces all of Sum
,0...:direction-in x forces all of Sum
!
,2,1
!
,2,1
!
,2,1
P
z
P
z
yy
xx
MM
FF
FF
Force EEs can be substituted by moment EEs
3 moment reference points should not lie on one line
3 equations of equilibrium for each FBD in 2D:
2.7 Static Equilibrium
Important:
Free-body diagram (FBD) first, then equilibrium!
F
F
10 N
Free-body diagram
(FBD)

.0 :RPunkt bezüglich Achse-z um Momentealler Summe
.0 :QPunkt bezüglich Achse-y um Momentealler Summe
.0 :PPunkt bezüglich Achse- xum Momentealler Summe
,0 :Richtung-zin Kräftealler Summe
,0 :Richtung-yin Kräftealler Summe
,0 :Richtung-in x Kräftealler Summe
!
!
!
!
!
!
i
R
iz
i
Q
iy
i
P
ix
i
iz
i
iy
i
ix
M
M
M
F
F
F
6 equlibrium equations for one FBD in 3D:
Force EEs can be substituted by moment EEs
Max. 2 moment axis parallel to each other
Determinant of coef. matrix not zero

2.8 Recipe for Solving Problems in Statics
Step 1: Model building. Generate a simplified replacement model
(diagram with geometry, forces, constraints).
Step 2: Cutting, Free-body diagram. Cut system and develop
free-body diagrams. Include forces and moments at cut, as well
as weight.
Step 3: Equilibrium equations. Write the force- and moment
equilibrium equations (only for free-body diagrams).
Step 4: Solve the equations. One can only solve for as many
unknowns as equations, at most.
Step 5: Display results, explain, confirm with experimental
comparisons. Are the results reasonable?


















