
Lecture 2 time invariant systems - Sahar...
29
System Identification Lecture 2:Models of linear time- invariant systems Sahar Moghimi 1
Transcript of Lecture 2 time invariant systems - Sahar...

System Identification
Lecture 2:Models of linear time-ectu e 2: ode s o ea t einvariant systems
Sahar Moghimi
1
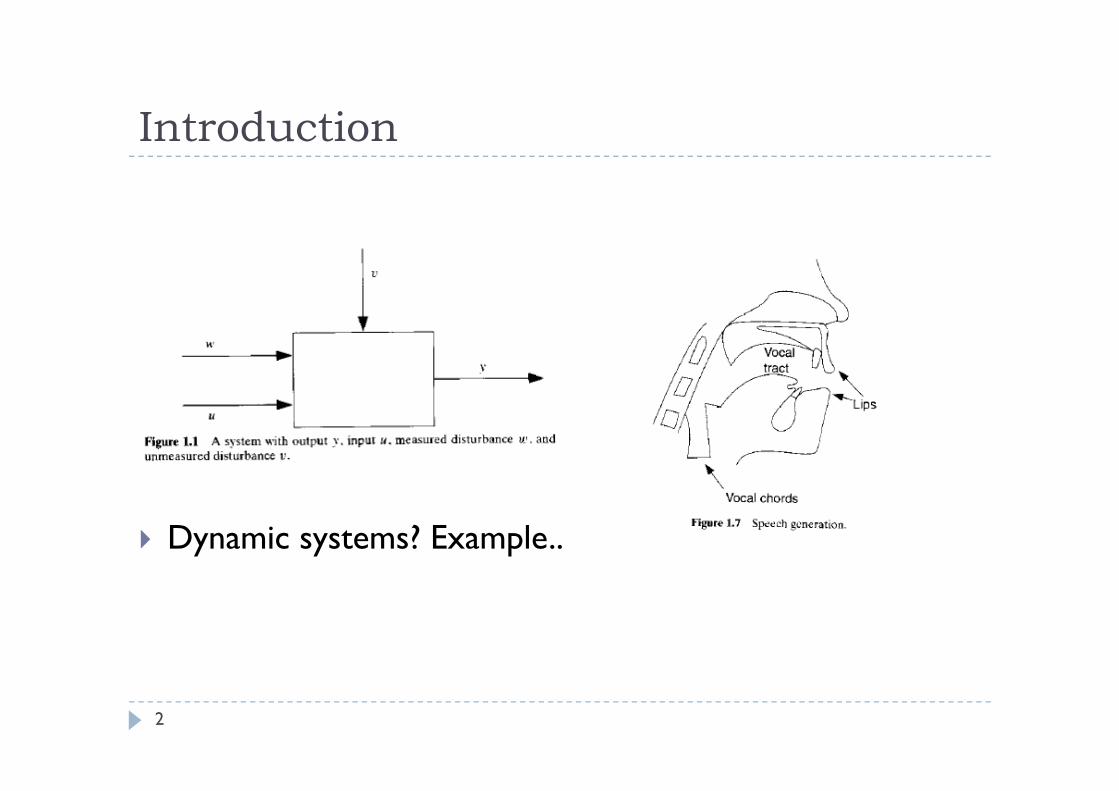
IntroductionIntroduction
Dynamic systems? Example..
2
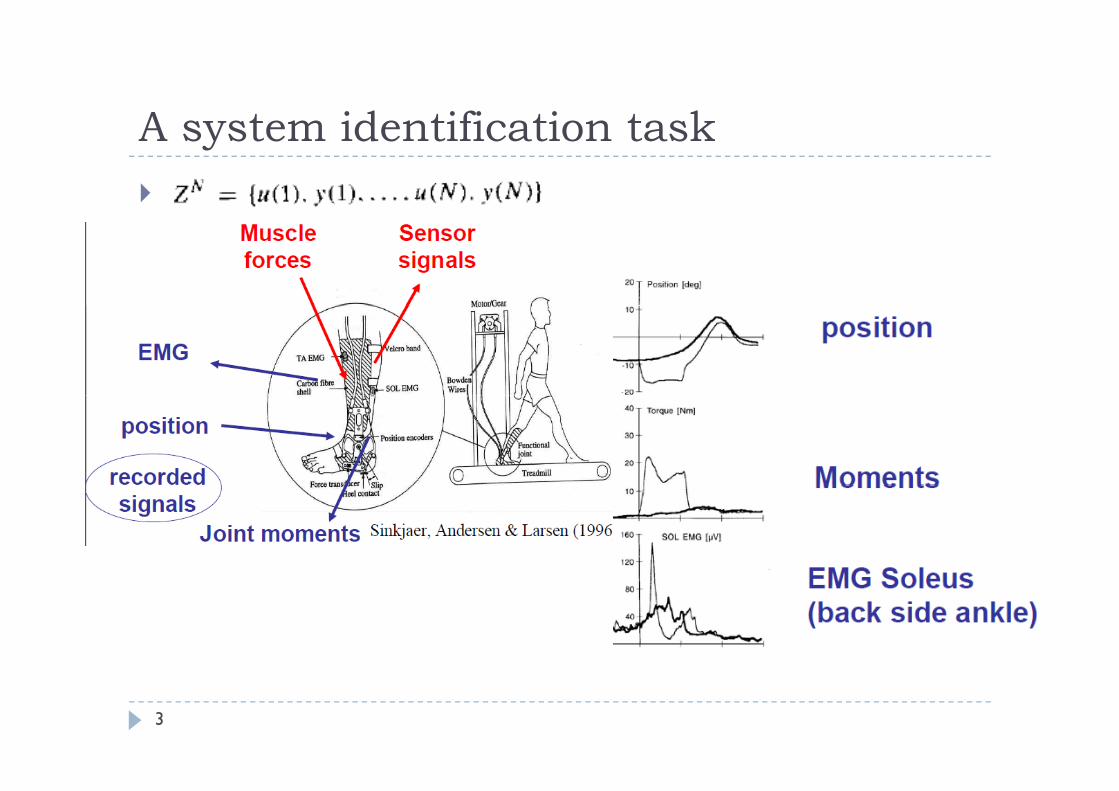
A system identification taskA system identification task
3

A system identification taskA system identification task
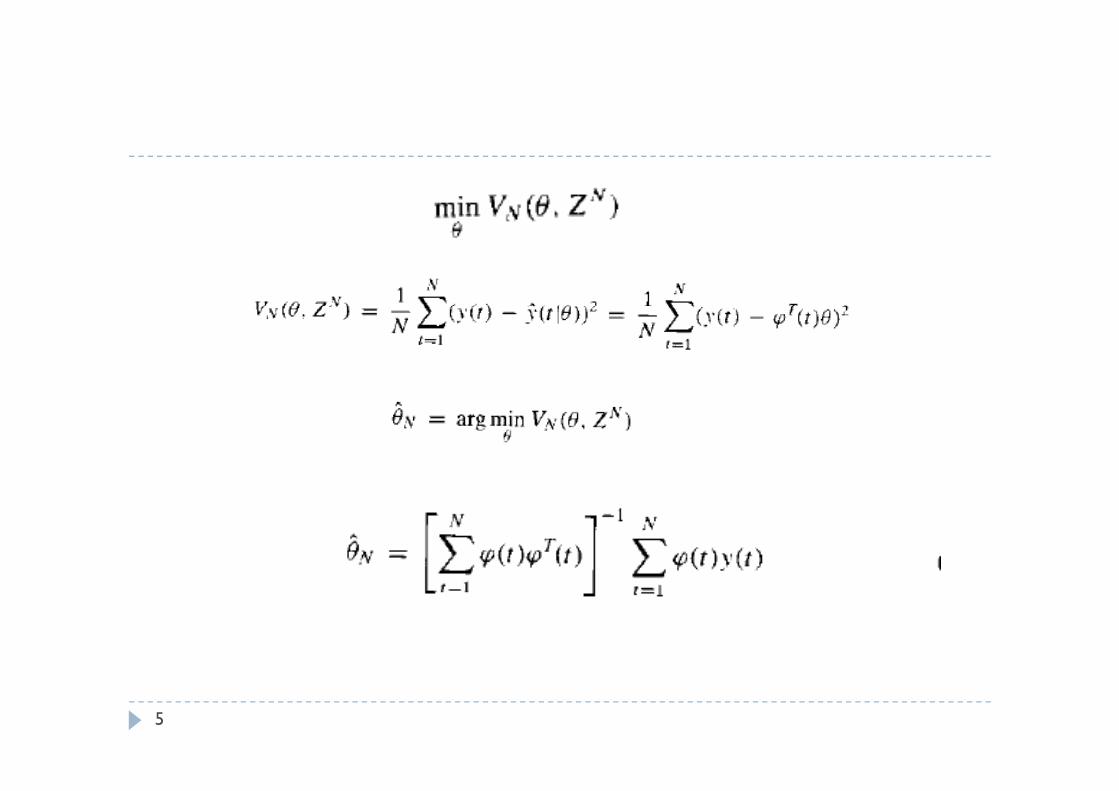
Linear regressionLinear regression
Regressor vector
4
5
System identification steps:System identification steps: A data set A set of candidate models (model structure) A rule for determination of model parametersp
6

Review chapters
2: Time-invariant linear systemsy 3: Simulation and prediction
7
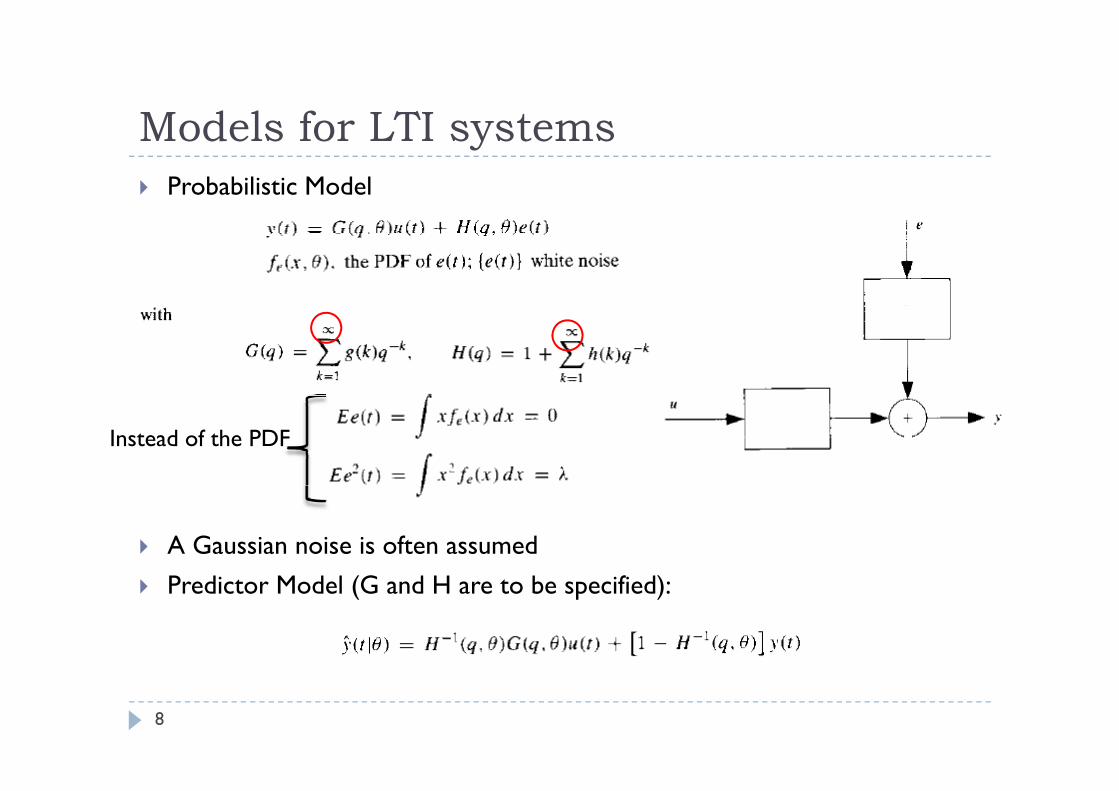
Models for LTI systemsModels for LTI systems Probabilistic Model
Instead of the PDF
A Gaussian noise is often assumed Predictor Model (G and H are to be specified):
8
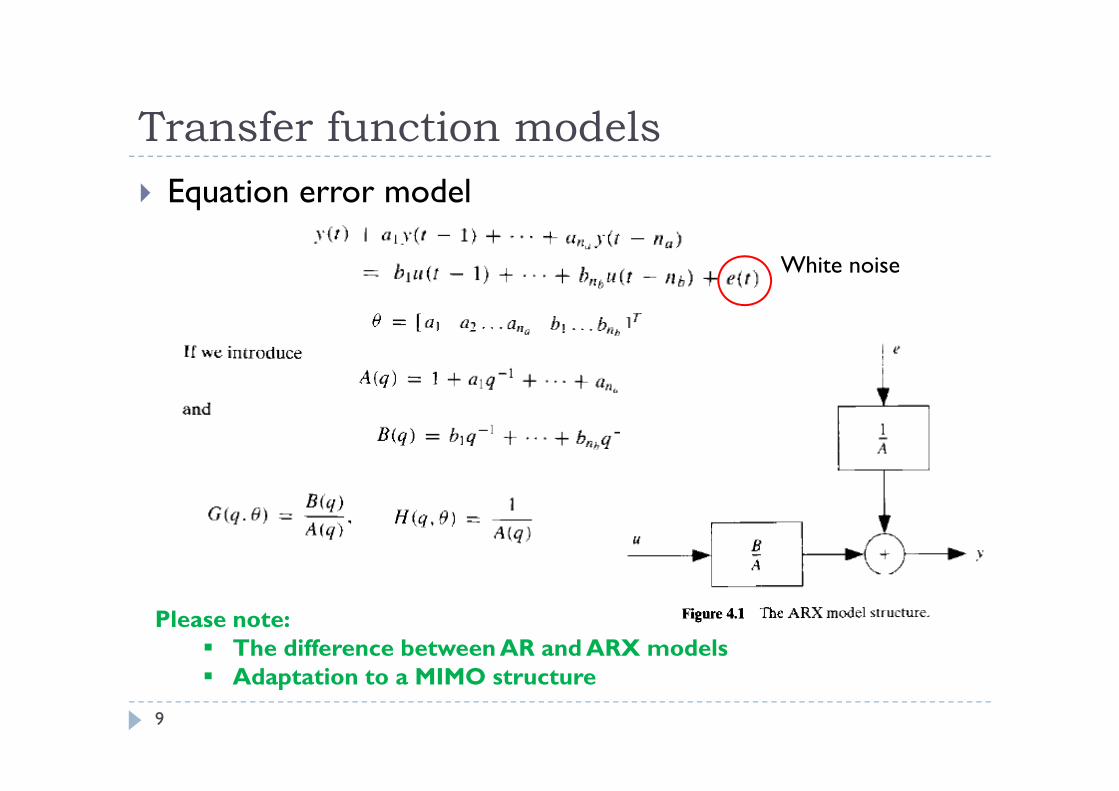
Transfer function modelsTransfer function models Equation error model
White noise
Please note: The difference between AR and ARX models
9
Adaptation to a MIMO structure

Example: NIRS study of musical emotions
10
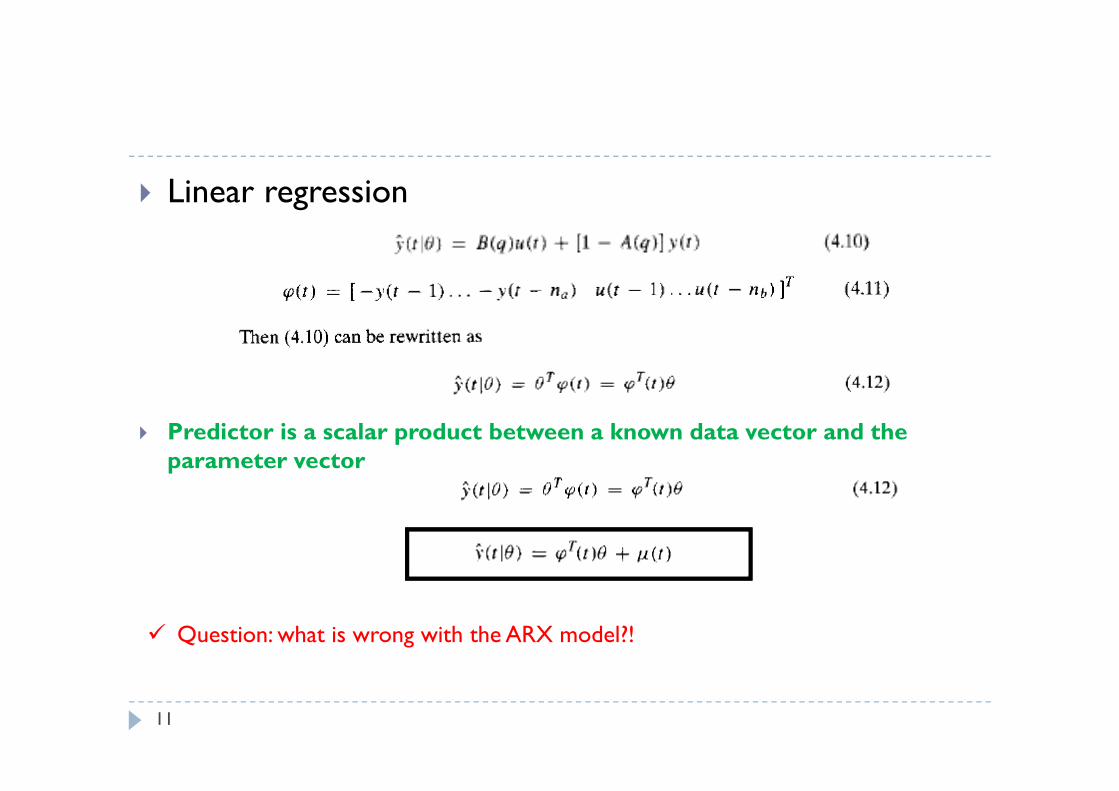
Linear regression
Predictor is a scalar product between a known data vector and the parameter vector
Question: what is wrong with the ARX model?!
11
The disadvantage of the ARX model
Disturbances are part of the system dynamics.
The transfer function of the deterministic part G of the system and the transfer function of the stochastic part H of the system have the same set of poles. This coupling can be unrealistic.
The system dynamics and stochastic dynamics of the system do not share the same set of poles all the time.
H d hi di d if h d i l However, you can reduce this disadvantage if you have a good signal-to-noise ratio.
12

ARMAX:
13

Pseudo-linear regression
Please note that B determined the dynamic of the system, sometimes there is a delay between u and y so B starts from a value other than 1: Exampleis a delay between u and y so B starts from a value other than 1: Example
Unavailable values can be set to zero
14
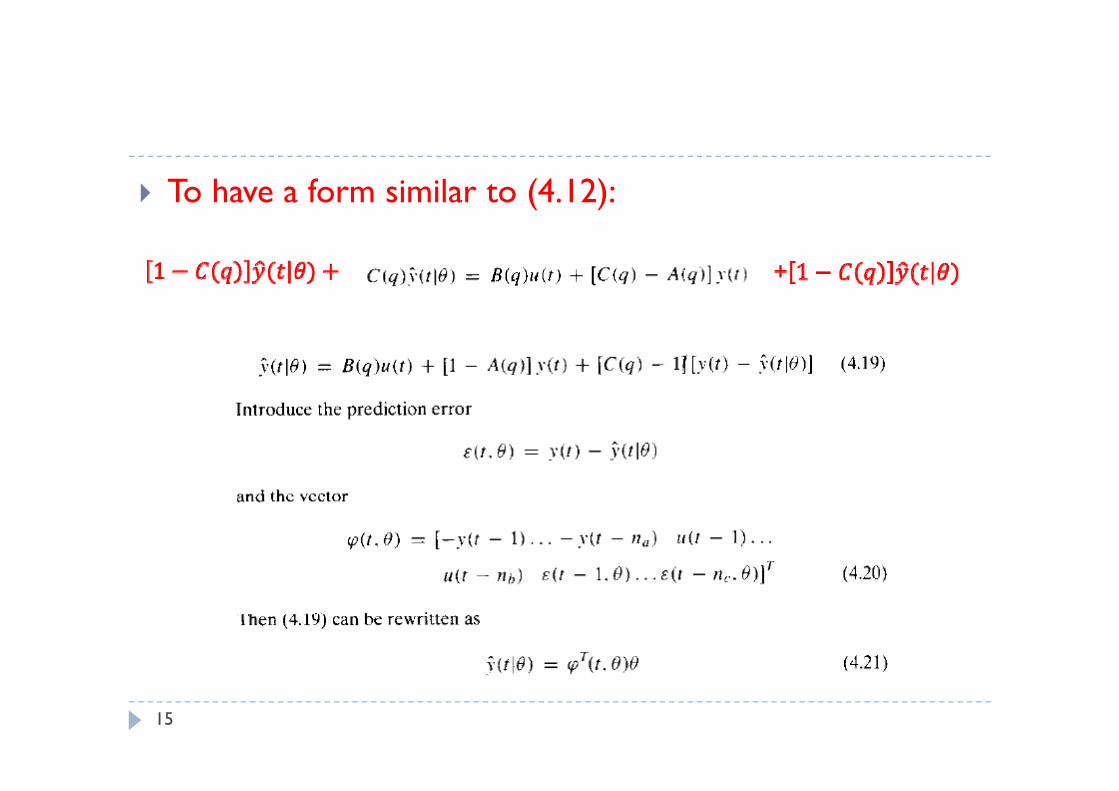
To have a form similar to (4.12):
15
Least square from text Will be introduced with details in the third lecture
16
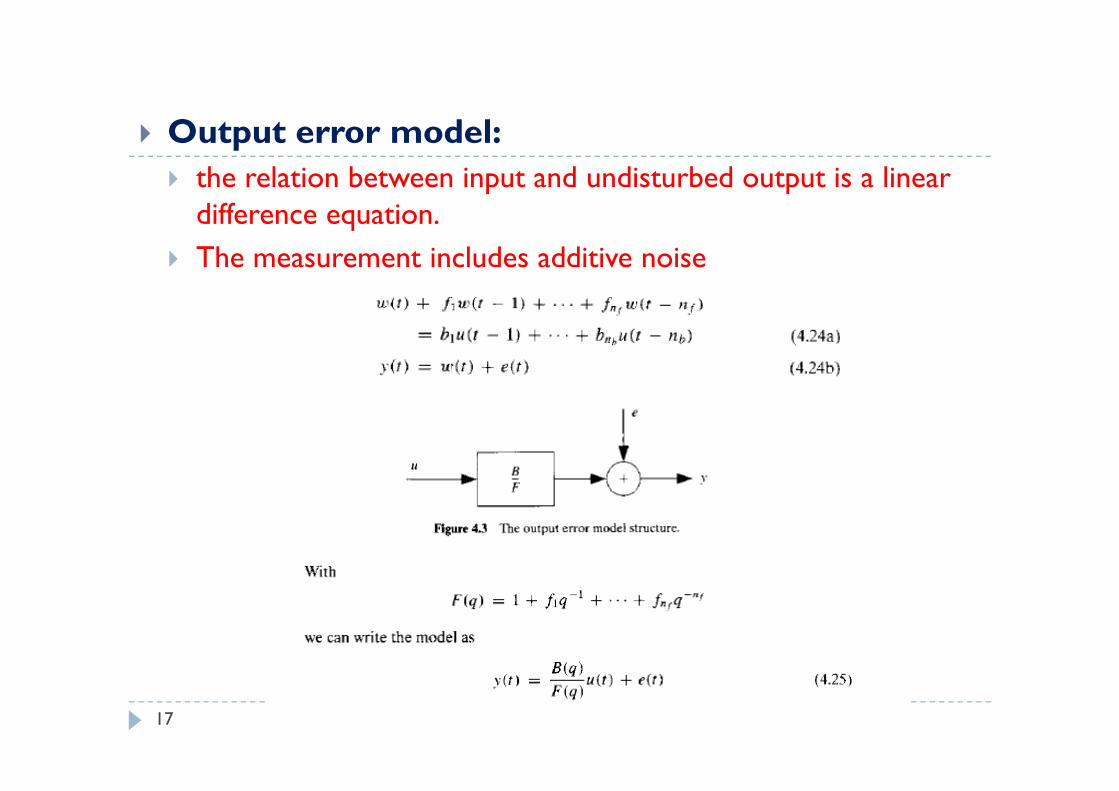
O t t d l Output error model: the relation between input and undisturbed output is a linear
difference equation difference equation. The measurement includes additive noise
17
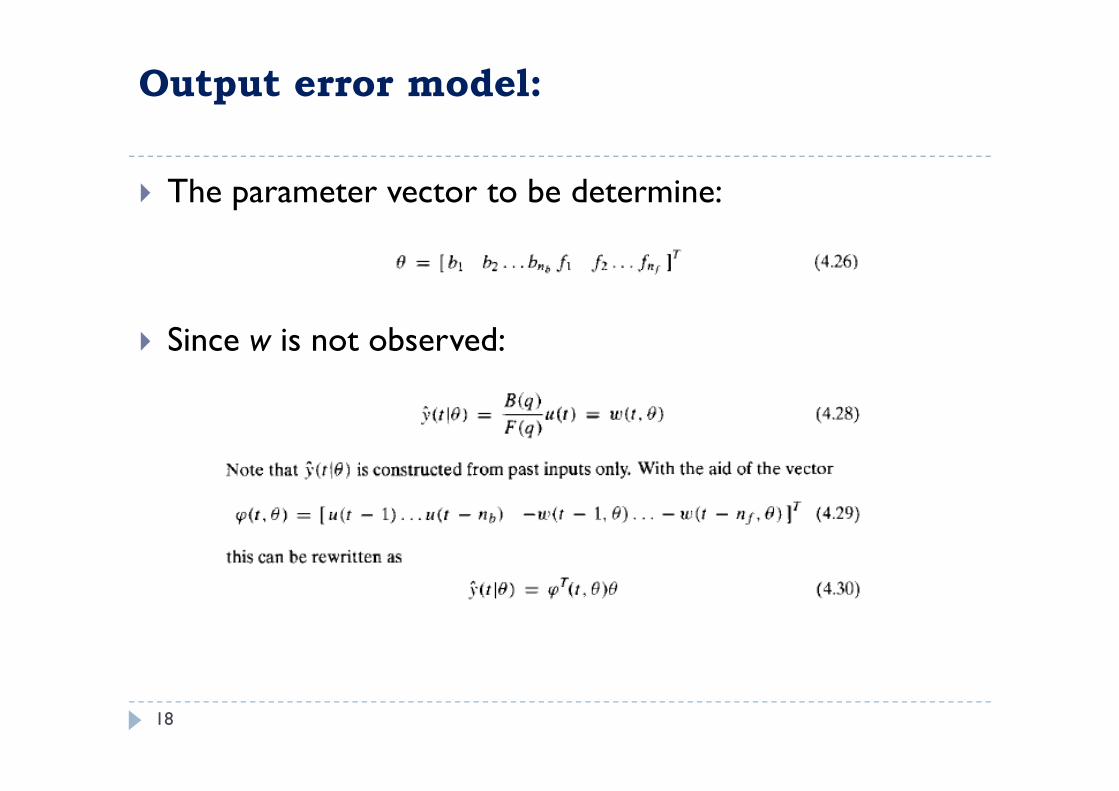
Output error model:
The parameter vector to be determine:
Since w is not observed:
18
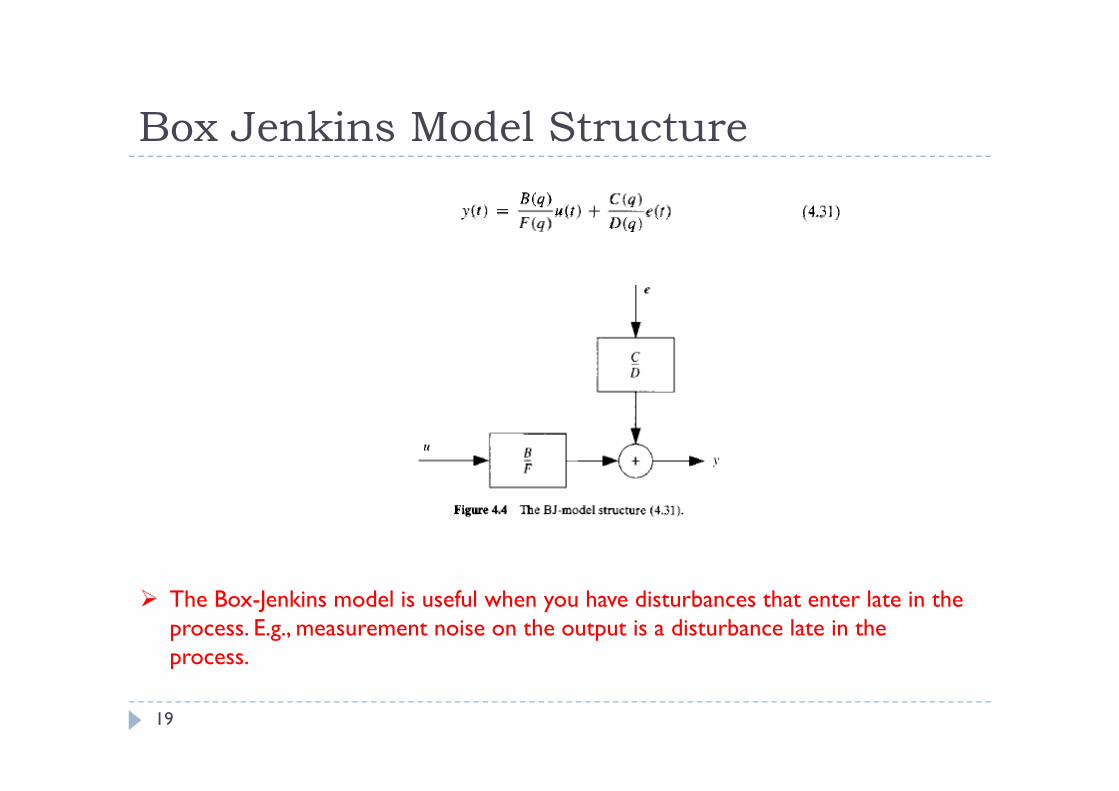
Box Jenkins Model StructureBox Jenkins Model Structure
The Box-Jenkins model is useful when you have disturbances that enter late in the process. E.g., measurement noise on the output is a disturbance late in the process.
19
p

General structure:
20
PLEASE NOTE!PLEASE NOTE! For any particular problem the choice of the
model structure to use depends on the dynamics and the noise characteristics of the system.
Using a model with more freedom or parameters is not always better as it can result in the
d li f i d i d i modeling of nonexistent dynamics and noise characteristics. Thi i h h i l i i h i i This is where physical insight into a system is helpful.
21

Choose a data set Divide it to estimation and test sets Define the mentioned models and use LSE to evaluate
your model. Analyze your estimation errory y
22

State space modelsState space models States variables are usually chosen with an insight to the
physical properties of the system
Measurement
23

State space modelsState space models The following equations describe a state-space model in
discrete time.
x(t) is the state vector, y(t) is the system output, u(t) the system input and v(t) is the stochastic error. A, B, and C are the system matrices.
24

Assumed:Measured:
Further modeling of the noise term
25
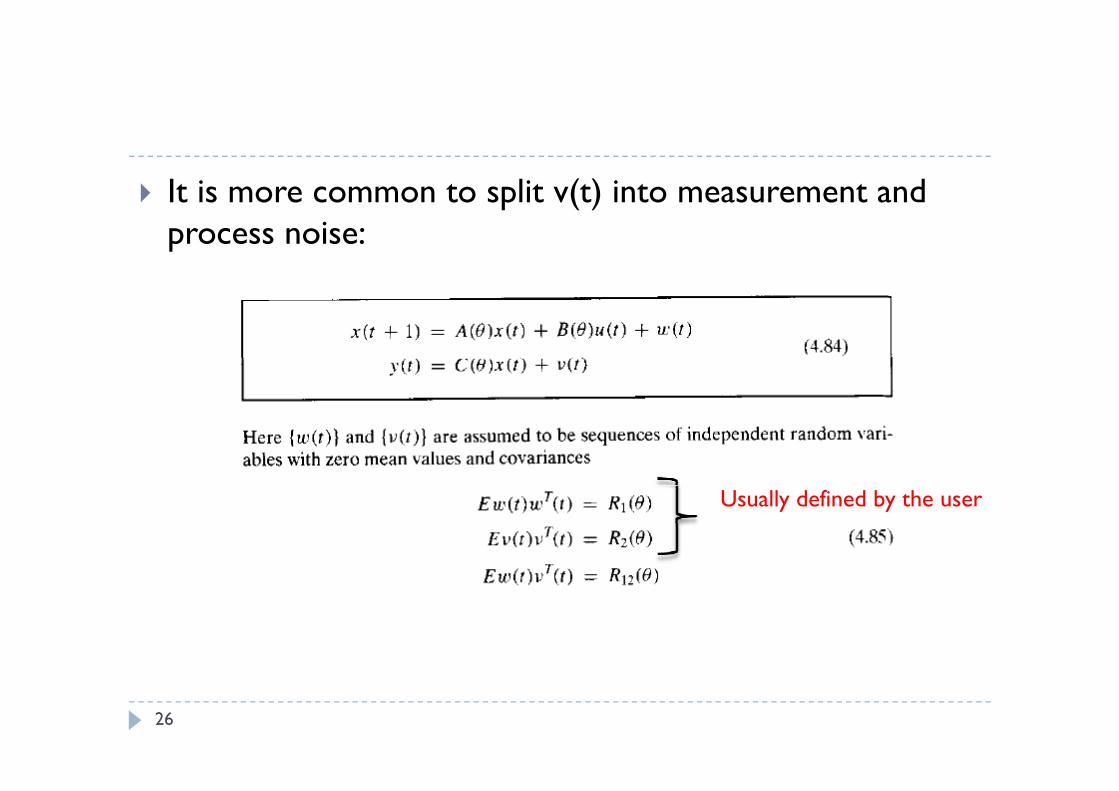
It is more common to split v(t) into measurement and process noise:
Usually defined by the user
26
Few suggestionsFew suggestions Determining the delay and model order for the parametric model is typically a trial-
and-error process. 1. Obtain a reasonable estimate of delay using correlation analysis and/or by testing reasonable values in a medium size ARX model. Choose the delay that provides the best model fit based on prediction errors or other fit criterion.2. Test various ARX model orders with this delay choosing those that provide the best fit.3. Since the ARX model describes both the system dynamics and noise properties using the same set of poles, the resulting model may be unnecessarily high in order. By plotting the zeros and poles (with the uncertainty intervals) and looking for cancellations you can reduce the model order. The resulting order of the poles and zeros are a good starting point for ARMAX, OE and/or BJ models with these orders used as the B and F model parameters and first or second order models for the noise characteristics.4. If a suitable model is not obtained at this point attempt to determine if there are additional signals that may influence the output. Measurements of these signals can be incorporated as extra input signals.
If you cannot obtain a suitable model following these steps additional physical insight into the problem might be necessary: you might have to handle the system insight into the problem might be necessary: you might have to handle the system from the prediction error standpoint, the higher the order of the model is, the better the model fits the data because the model has more degrees of freedom. However, you need more computation time and memory for higher orders.
Th i i i l d t h i th d l ith th ll t d f The parsimony principle advocates choosing the model with the smallest degree of freedom, or number of parameters, if all the models fit the data well and pass the verification test.
27
ReferenceReference Chapter 1-4, System Identification: Theory for Users,
Ljung
28
Any questions?Any questions?
29


















