
Lecture 13: Acceleration Structures
15
Lecture 13: Acceleration Structures Fall 2004 Kavita Bala Computer Science Cornell University © Kavita Bala, Computer Science, Cornell University Making RT faster Ray Tracing Acceleration Techniques Faster Intersections Fewer Rays Faster Ray-Object Intersections Fewer Ray-Object Intersections Regular Rays Generalized Rays •For each pixel, O(N) •For each light, k shadow rays •For GI and antialiasing: many rays per pixel
Transcript of Lecture 13: Acceleration Structures

1
Lecture 13:Acceleration Structures
Fall 2004Kavita Bala
Computer ScienceCornell University
© Kavita Bala, Computer Science, Cornell University
Making RT faster
Ray Tracing AccelerationTechniques
Faster Intersections
Fewer Rays
Faster Ray-ObjectIntersections
Fewer Ray-ObjectIntersections
Regular Rays
Generalized Rays•For each pixel, O(N)
•For each light, k shadow rays
•For GI and antialiasing: many rays per pixel

2
© Kavita Bala, Computer Science, Cornell University
Faster Ray-Object Intersections• Object bounding volumes
• Avoid intersection tests for expensive objects: e.g., polygon sets, spline surfaces– Ray/sphere or ray/cuboid test is fast
© Kavita Bala, Computer Science, Cornell University
Tight Fit to Bounding Volume

3
© Kavita Bala, Computer Science, Cornell University
Fewer Ray-Object Intersections• From O(N) to O(log N)• How?
– Apply the idea of bounding boxes hierarchically
– Cluster objects hierarchically– Single intersection might eliminate cluster
• Bounding volume hierarchy• Space subdivision
– Octree, Kd-tree, BSP-trees
© Kavita Bala, Computer Science, Cornell University
Bounding Volume Hierarchy• Hierarchical object bounding volumes• Spheres, axis-aligned bounding boxes (AABB),
oriented bounding boxes(OBB): fast

4
© Kavita Bala, Computer Science, Cornell University
Intersection Acceleration
• Trace ray against root node• If ray intersects node
– Trace ray against ALL children (Recurse)
© Kavita Bala, Computer Science, Cornell University
Intersection Acceleration• Trace ray against root node• If ray intersects node
– Trace ray against ALL children (Recurse)

5
© Kavita Bala, Computer Science, Cornell University
Intersection Acceleration• If no intersection, eliminate tests with all
children!
© Kavita Bala, Computer Science, Cornell University
BVH: Construction• Group objects together
– Top-down: how to split?– Bottom-up: minimize surface area?

6
© Kavita Bala, Computer Science, Cornell University
BVH: Construction• Group objects together
– Top-down: how to split?– Bottom-up: minimize surface area?
© Kavita Bala, Computer Science, Cornell University
Fewer Ray-Object Intersections• From O(N) to O(log N)
• Bounding volume hierarchy
• Space subdivision– Octree (Quadtree in 2D)– Non-uniform (kd-tree)– BSP-tree

7
© Kavita Bala, Computer Science, Cornell University
Spatial Hierarchy• Hierarchical spatial subdivision
– Divides up space• Children are distinct and cover parent
© Kavita Bala, Computer Science, Cornell University
Construction• Maximum depth• Maximum number of elements in leaf

8
© Kavita Bala, Computer Science, Cornell University
Intersection Acceleration
© Kavita Bala, Computer Science, Cornell University
Intersection Acceleration

9
© Kavita Bala, Computer Science, Cornell University
Intersection Acceleration
© Kavita Bala, Computer Science, Cornell University
Intersection Acceleration

10
© Kavita Bala, Computer Science, Cornell University
Intersection Acceleration
© Kavita Bala, Computer Science, Cornell University
Intersection Acceleration1. Intersect ray with root: p = root.intersect(ray)
– If no intersection, done2. Find p in tree (node j = root.find(p))3. Test ray against elements in node j
– If intersection found, done– Else find exit point (q) from node j, p = q, goto 2
11
© Kavita Bala, Computer Science, Cornell University
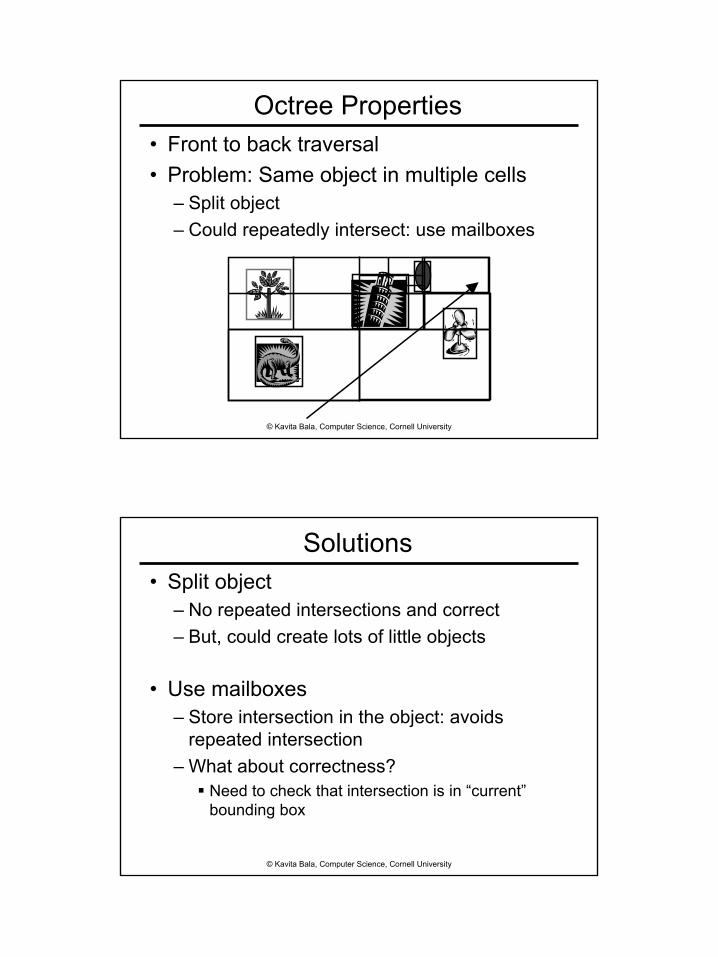
Octree Properties• Front to back traversal• Problem: Same object in multiple cells
– Split object– Could repeatedly intersect: use mailboxes
© Kavita Bala, Computer Science, Cornell University
Solutions• Split object
– No repeated intersections and correct– But, could create lots of little objects
• Use mailboxes– Store intersection in the object: avoids
repeated intersection– What about correctness?
Need to check that intersection is in “current” bounding box

12
© Kavita Bala, Computer Science, Cornell University
Octree Problems• Distribution of objects• Chops up objects
© Kavita Bala, Computer Science, Cornell University
K-dimensional (kd) Tree• Spatial subdivision
– Subdivide only 1 dimension– Do not subdivide at the center
• Tracing with kd-tree unchanged

13
© Kavita Bala, Computer Science, Cornell University
Construction• Which axis to pick? • What point on the axis to pick?• One heuristic:
– Sort objects on each axis– Pick point corresponding to “middle” object– Pick axis that has “best” distribution of objects– L = n/2, R = n/2 (ideal)– Realistically,
minimize (L-R) andL approx. n/2, R approx. n/2
© Kavita Bala, Computer Science, Cornell University
BSP Tree• Generalization of kd-trees• Splitting plane is not axis aligned• Used in games: DOOM
12
3
4
57
6

14
© Kavita Bala, Computer Science, Cornell University
BSP Construction• Use a polygon to define the splitting plane• Other objects either split or stored high up
1
1
2 33
4
2
57
654 76
© Kavita Bala, Computer Science, Cornell University
How to construct?• Least-crossed criterion (random selection
of polygons)– Do not split many polygons
• Try to make it balanced

15
© Kavita Bala, Computer Science, Cornell University
BSP Traversal• Front to back ordering• Strict occlusion order (not closest object)
1
1
2 33
4
2
57
654 76
V















![Lecture 8. Lecture 8: Outline Structures [Kochan, chap 9] –Defining and using Structures –Functions and Structures –Initializing Structures. Compound.](https://static.fdocuments.us/doc/165x107/56649e185503460f94b04bea/lecture-8-lecture-8-outline-structures-kochan-chap-9-defining-and-using.jpg)

