Lecture 07 EAILC

of 55
Transcript of Lecture 07 EAILC
-
7/22/2019 Lecture 07 EAILC
1/55
Lecture 7: Deterministic Self-Tuning Regulators
Feedback Control Design for Nominal Plant Model
via Pole Placement
Indirect Self-Tuning Regulators
Direct Self-Tuning Regulators
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 1/20
-
7/22/2019 Lecture 07 EAILC
2/55
Indirect Self-Tuning Regulators
Consider a single input single output (SISO) system
y(t) + a1y(t 1) + + any(t n)
= b0u(t d0) + + + bmu(td0m)
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 2/20
-
7/22/2019 Lecture 07 EAILC
3/55
Indirect Self-Tuning Regulators
Consider a single input single output (SISO) system
y(t) + a1y(t 1) + + any(t n)
= b0u(t d0) + + + bmu(td0m)It can be re written in the regression form
y(t) = a1y(t 1) any(t n) + b0u(t d0) +
+ b1u(td01) + + bmu(td0m)
= (t 1)T0
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 2/20
-
7/22/2019 Lecture 07 EAILC
4/55
Indirect Self-Tuning Regulators
Consider a single input single output (SISO) system
y(t) + a1y(t 1) + + any(t n)
= b0u(t d0) + + + bmu(td0m)It can be re written in the regression form
y(t) = a1y(t 1) any(t n) + b0u(t d0) +
+ b1u(td01) + + bmu(td0m)
= (t 1)T0
where 0 =
a1, . . . , an, b0, . . . , bm
T
(t 1) = y(t 1), . . . ,y(t n),u(t d0), . . . , u(td0m)
T
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 2/20
-
7/22/2019 Lecture 07 EAILC
5/55
RLS Algorithm (discrete time)
Given the data
y(t), (t 1)N
t0defined by the model
y(t) = (t 1)T
0
, t = t0, t0+ 1, . . . , N
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 3/20
-
7/22/2019 Lecture 07 EAILC
6/55
RLS Algorithm (discrete time)
Given the data
y(t), (t 1)N
t0defined by the model
y(t) = (t 1)T
0
, t = t0, t0+ 1, . . . , N
With the initial guess (t0)and a measure of our trust in thisguess: P(t0) > 0, we can use the RLS algorithm:
(t) = (t 1)+ K(t)
y(t) (t 1)T(t 1)
K(t) = P(t)(t 1) = P(t 1) (t 1) + (t 1)TP(t 1)(t 1)
P(t) =
1
P(t 1)
P(t 1) (t 1) (t 1)T P(t 1)
+ (t 1)T P(t 1) (t 1)
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 3/20
-
7/22/2019 Lecture 07 EAILC
7/55
RLS Algorithm (continuous time)
Given the data
y(), ()t
t=t0defined by the model
y() = ()T0, [t0, t]
obtained from A(p) y() = B(p) u() using filtered signals
yf() = Hf(p) y()anduf() = Hf(p) u()as follows
y() = pn yf(), ()T =
pn1 yf(), . . . , p
m1 uf()
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 4/20
-
7/22/2019 Lecture 07 EAILC
8/55
RLS Algorithm (continuous time)
Given the data
y(), ()t
t=t0defined by the model
y() = ()T0, [t0, t]
obtained from A(p) y() = B(p) u() using filtered signals
yf() = Hf(p) y()anduf() = Hf(p) u()as follows
y() = pn yf(), ()T =
pn1 yf(), . . . , p
m1 uf()
With the initial guess (t0)and a measure of our trust in this
guess: P(t0) > 0, we can use the RLS algorithm:
(t) = P(t) (t)
y(t) (t)T(t)
P(t) = P(t) P(t)
(t) (t)T
P(t)
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 4/20
-
7/22/2019 Lecture 07 EAILC
9/55
Algorithm using RLS and MD Pole Placement
Off-line Parameters: Given polynomialsBm, Am, Ao
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 5/20
-
7/22/2019 Lecture 07 EAILC
10/55
Algorithm using RLS and MD Pole Placement
Off-line Parameters: Given polynomialsBm, Am, Ao
Step 1: Estimate the coefficients of AandB = B+ B, i.e. 0,
using the Recursive Least Squares algorithm.
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 5/20
-
7/22/2019 Lecture 07 EAILC
11/55
Algorithm using RLS and MD Pole Placement
Off-line Parameters: Given polynomialsBm, Am, Ao
Step 1: Estimate the coefficients of AandB = B+ B, i.e. 0,
using the Recursive Least Squares algorithm.
Step 2: Apply the Minimum Degree Pole Placement algorithm
(deg A=deg Am, deg B=deg Bm, deg Ao=deg Adeg B+1, Bm=BBpm)
R= Rp B+, T = Ao Bpm, S, R p : A Rp+B
S= Ao Am
with estimates forAandB taken from the previous Step.
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 5/20
-
7/22/2019 Lecture 07 EAILC
12/55
Algorithm using RLS and MD Pole Placement
Off-line Parameters: Given polynomialsBm, Am, Ao
Step 1: Estimate the coefficients of AandB = B+ B, i.e. 0,
using the Recursive Least Squares algorithm.
Step 2: Apply the Minimum Degree Pole Placement algorithm
(deg A=deg Am, deg B=deg Bm, deg Ao=deg Adeg B+1, Bm=BBpm)
R= Rp B+, T = Ao Bpm, S, R p : A Rp+B
S= Ao Am
with estimates forAandB taken from the previous Step.
Step 3: Compute the feedback control law
R u(t) = Tuc(t) S y(t)
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 5/20
-
7/22/2019 Lecture 07 EAILC
13/55
Algorithm using RLS and MD Pole Placement
Off-line Parameters: Given polynomialsBm, Am, Ao
Step 1: Estimate the coefficients of AandB = B+ B, i.e. 0,
using the Recursive Least Squares algorithm.
Step 2: Apply the Minimum Degree Pole Placement algorithm
(deg A=deg Am, deg B=deg Bm, deg Ao=deg Adeg B+1, Bm=BBpm)
R= Rp B+, T = Ao Bpm, S, R p : A Rp+B
S= Ao Am
with estimates forAandB taken from the previous Step.
Step 3: Compute the feedback control law
R u(t) = Tuc(t) S y(t)
Repeat Steps 1, 2, 3 (until the performance is satisfactory).
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 5/20
-
7/22/2019 Lecture 07 EAILC
14/55
Example 3.4 (Recursive Modification of Example 3.1)
Given a continuous time system
y+ y = u,
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 6/20
-
7/22/2019 Lecture 07 EAILC
15/55
Example 3.4 (Recursive Modification of Example 3.1)
Given a continuous time system
y+ y = u,
its pulse transfer function with sampling periodh= 0.5sec is
G(q) = b1q+ b2
q2 + a1q+ a2=
0.1065q+ 0.0902
q2 1.6065q+ 0.6065
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 6/20
-
7/22/2019 Lecture 07 EAILC
16/55
Example 3.4 (Recursive Modification of Example 3.1)
Given a continuous time system
y+ y = u,
its pulse transfer function with sampling periodh= 0.5sec is
G(q) = b1q+ b2
q2 + a1q+ a2=
0.1065q+ 0.0902
q2 1.6065q+ 0.6065
The task is to synthesize a 2-degree-of-freedom controller suchthat the complementary sensitivity transfer function is
Bm(q)Am(q)
= 0.1761qq2 1.3205q 0.4966
We will take uc(t) = 1 for t 0 except for
uc(t) = 1 for 15 t < 30, uc(t) = 0 for 50 t 70
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 6/20
-
7/22/2019 Lecture 07 EAILC
17/55
Example 3.4 (Recursive Modification of Example 3.1)
We have found the controller via MD pole placement
R(q)u(t) = T(q)uc(t) S(q)y(t)
with
R(q) = q+ 0.8467
S(q) = 2.6852 q 1.0321
T(q) = 1.6531 q
that stabilizes the discrete plant. Will it stabilize the
continuous-time system as well?
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 7/20
-
7/22/2019 Lecture 07 EAILC
18/55
Example 3.4 (Recursive Modification of Example 3.1)
We have found the controller via MD pole placement
R(q)u(t) = T(q)uc(t) S(q)y(t)
with
R(q) = q+ 0.8467
S(q) = 2.6852 q 1.0321
T(q) = 1.6531 q
that stabilizes the discrete plant. Will it stabilize the
continuous-time system as well?
Let us design the adaptive controller which would recover theperformance for the case when parameters of the plant - the
polynomialsA(q)andB(q) are not known!
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 7/20
-
7/22/2019 Lecture 07 EAILC
19/55
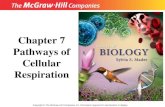
0 10 20 30 40 50 60 70 80 902
1.5
1
0.5
0
0.5
1
1.5
2
time
output
The response of the closed-loop system with adaptive controller
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 8/20
-
7/22/2019 Lecture 07 EAILC
20/55
0 10 20 30 40 50 60 70 80 905
4
3
2
1
0
1
2
3
4
5
time
control
The control signal
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 9/20
-
7/22/2019 Lecture 07 EAILC
21/55
0 5 10 15 20 25 30 35 402
1
0
1
a1
0 5 10 15 20 25 30 35 400.5
0
0.5
1
a2
0 5 10 15 20 25 30 35 400.1
0.15
0.2
0.25
b1
0 5 10 15 20 25 30 35 400
0.2
0.4
b2
time (sec)
Adaptation of parameters defining polynomials A(q)andB(q)
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 10/20
-
7/22/2019 Lecture 07 EAILC
22/55
Lecture 6: Deterministic Self-Tuning Regulators
Feedback Control Design for Nominal Plant Model
via Pole Placement
Indirect Self-Tuning Regulators
Direct Self-Tuning Regulators
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 11/20
-
7/22/2019 Lecture 07 EAILC
23/55
Direct Self-Tuning Regulators
The previous algorithm consists of two steps
Step 1: Computing estimates for the polynomialsA(q),B(q)
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 12/20
-
7/22/2019 Lecture 07 EAILC
24/55
Direct Self-Tuning Regulators
The previous algorithm consists of
Step 1: Computing estimates A(q), B(q)forA(q),B(q)
Step 2: Computing polynomials defining the controller
R(q), T(q), S(q)
based on A(q), B(q).
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 12/20
-
7/22/2019 Lecture 07 EAILC
25/55
Direct Self-Tuning Regulators
The previous algorithm consists of
Step 1: Computing estimates A(q), B(q)forA(q),B(q)
Step 2: Computing polynomials defining the controller
R(q), T(q), S(q)
based on A(q), B(q).
Such procedure has potential drawbacks like
Redundant step in design: why to know A(q)andB(q)?
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 12/20
-
7/22/2019 Lecture 07 EAILC
26/55
Direct Self-Tuning Regulators
The previous algorithm consists of
Step 1: Computing estimates A(q), B(q)forA(q),B(q)
Step 2: Computing polynomials defining the controller
R(q), T(q), S(q)
based on A(q), B(q).
Such procedure has potential drawbacks like
Redundant step in design: why to know A(q)andB(q)?
Control design methods (pole placement, LQR, . . . ) are
sensitive to mistakes in A(q), B(q). Is there a way to avoidsuch poorly conditioned numerical computations?
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 12/20
-
7/22/2019 Lecture 07 EAILC
27/55
Direct Self-Tuning Regulators
The previous algorithm consists of
Step 1: Computing estimates A(q), B(q)forA(q),B(q)
Step 2: Computing polynomials defining the controller
R(q), T(q), S(q)
based on A(q), B(q).
The procedure has potential drawbacks like
Redundant step in design: why to know A(q)andB(q)?
Control design methods (pole placement, LQR, . . . ) are
sensitive to mistakes in A(q), B(q). Is there a way to avoidsuch poorly conditioned numerical computations? E.g.:
A(q) = q(q 1), B(q) = q+
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 12/20
-
7/22/2019 Lecture 07 EAILC
28/55
Direct Self-Tuning Regulators
The idea of another approach comes from the observation thatfor the plant
A(q) y(t) = B+(q) B(q) u(t)
and for the target system (the model to follow)
Am(q) y(t) = Bmp(q) B(q) uc(t)
the Diophantine equation
Ao(q) Am(q)= A(q) Rp(q)+ B(q) S(q)
can be seen as a regression to estimate coefficients of RandS
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 13/20
-
7/22/2019 Lecture 07 EAILC
29/55
Direct Self-Tuning Regulators
The idea of another approach comes from the observation thatfor the plant
A(q) y(t) = B+(q) B(q) u(t)
and for the target system (the model to follow)
Am(q) y(t) = Bmp(q) B(q) uc(t)
the Diophantine equation
Ao(q) Am(q)= A(q) Rp(q)+ B(q) S(q)
can be seen as a regression to estimate coefficients of RandS
Ao(q)Am(q)y(t) = A(q)Rp(q)+ B(q)S(q) y(t)
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 13/20
-
7/22/2019 Lecture 07 EAILC
30/55
Direct Self-Tuning Regulators
The idea of another approach comes from the observation thatfor the plant
A(q) y(t) = B+(q) B(q) u(t)
and for the target system (the model to follow)
Am(q) y(t) = Bmp(q) B(q) uc(t)
the Diophantine equation
Ao(q) Am(q)= A(q) Rp(q)+ B(q) S(q)
can be seen as a regression to estimate coefficients of RandS
Ao(q)Am(q)y(t) = A(q)Rp(q)y(t) + B(q)S(q)y(t)
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 13/20
-
7/22/2019 Lecture 07 EAILC
31/55
Direct Self-Tuning Regulators
The idea of another approach comes from the observation thatfor the plant
A(q) y(t) = B+(q) B(q) u(t)
and for the target system (the model to follow)
Am(q) y(t) = Bmp(q) B(q) uc(t)
the Diophantine equation
Ao(q) Am(q)= A(q) Rp(q)+ B(q) S(q)
can be seen as a regression to estimate coefficients of RandS
Ao(q)Am(q)y(t) = Rp(q)A(q)y(t) + B(q)S(q)y(t)
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 13/20
-
7/22/2019 Lecture 07 EAILC
32/55
Direct Self-Tuning Regulators
The idea of another approach comes from the observation thatfor the plant
A(q) y(t) = B+(q) B(q) u(t)
and for the target system (the model to follow)
Am(q) y(t) = Bmp(q) B(q) uc(t)
the Diophantine equation
Ao(q) Am(q)= A(q) Rp(q)+ B(q) S(q)
can be seen as a regression to estimate coefficients of RandS
Ao(q)Am(q)y(t) = Rp(q)B(q)u(t) + B(q)S(q)y(t)
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 13/20
-
7/22/2019 Lecture 07 EAILC
33/55
Direct Self-Tuning Regulators
The idea of another approach comes from the observation thatfor the plant
A(q) y(t) = B+(q) B(q) u(t)
and for the target system (the model to follow)
Am(q) y(t) = Bmp(q) B(q) uc(t)
the Diophantine equation
Ao(q) Am(q)= A(q) Rp(q)+ B(q) S(q)
can be seen as a regression to estimate coefficients of RandS
Ao(q)Am(q)y(t) = Rp(q)B+(q)B(q)u(t)+B(q)S(q)y(t)
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 13/20
-
7/22/2019 Lecture 07 EAILC
34/55
Direct Self-Tuning Regulators
The idea of another approach comes from the observation thatfor the plant
A(q) y(t) = B+(q) B(q) u(t)
and for the target system (the model to follow)
Am(q) y(t) = Bmp(q) B(q) uc(t)
the Diophantine equation
Ao(q) Am(q)= A(q) Rp(q)+ B(q) S(q)
can be seen as a regression to estimate coefficients of RandS
Ao(q)Am(q)y(t) = B(q) R(q) u(t) + S(q)y(t)
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 13/20
-
7/22/2019 Lecture 07 EAILC
35/55
Direct Self-Tuning for Minimum-Phase Systems
Suppose thatB(q)is stable and can be canceled, i.e.
A(q)y(t) = B(q)u(t)
= b0u(td0) + b1u(td01) + + bmu(td0m)
= B+(q)B(q)u(t) = B+(q)b0u(t)
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 14/20
-
7/22/2019 Lecture 07 EAILC
36/55
Direct Self-Tuning for Minimum-Phase Systems
Suppose thatB(q)is stable and can be canceled, i.e.
A(q)y(t) = B(q)u(t)
= b0u(td0) + b1u(td01) + + bmu(td0m)
= B+(q)B(q)u(t) = B+(q)b0u(t)
then Diophantine equation
Ao(q)Am(q)= A(q)Rp(q)+ B
(q)S(q)
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 14/20
-
7/22/2019 Lecture 07 EAILC
37/55
Direct Self-Tuning for Minimum-Phase Systems
Suppose thatB(q)is stable and can be canceled, i.e.
A(q)y(t) = B(q)u(t)
= b0u(td0) + b1u(td01) + + bmu(td0m)
= B+(q)B(q)u(t) = B+(q)b0u(t)
then Diophantine equation
Ao(q)Am(q)= A(q)Rp(q)+ B
(q)S(q)
leads to the regression
Ao(q)Am(q)y(t) = b0
Rp(q)u(t) + S(q)y(t)
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 14/20
-
7/22/2019 Lecture 07 EAILC
38/55
Direct Self-Tuning for Minimum-Phase Systems
Suppose thatB(q)is stable and can be canceled, i.e.
A(q)y(t) = B(q)u(t)
= b0u(td0) + b1u(td01) + + bmu(td0m)
= B+(q)B(q)u(t) = B+(q)b0u(t)
then Diophantine equation
Ao(q)Am(q)= A(q)Rp(q)+ B
(q)S(q)
leads to the regression
Ao(q)Am(q)y(t) = b0
Rp(q)u(t) + S(q)y(t)
which is in the form (t) = (t)T with
Ao(q)Am(q)y(t) = (t), (t)T = b0
R(q)u(t) + S(q)y(t)
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 14/20
-
7/22/2019 Lecture 07 EAILC
39/55
Direct Self-Tuning for Minimum-Phase Systems
In the formula
(t) = b0R(q)u(t) + b0S(q)y(t) = (t)T
the vector of regressors is
(t) = [u(t), . . . , u(t l), y(t), . . . , y(t l)]T
and the vector of parameters is
= [b0r0, . . . , b0rl, b0s0, . . . , b0sl]T
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 15/20
-
7/22/2019 Lecture 07 EAILC
40/55
Direct Self-Tuning for Minimum-Phase Systems
In the formula
(t) = b0R(q)u(t) + b0S(q)y(t) = (t)T
the vector of regressors is
(t) = [u(t), . . . , u(t l), y(t), . . . , y(t l)]T
and the vector of parameters is
= [b0r0, . . . , b0rl, b0s0, . . . , b0sl]T
Supposeis estimated by , then
R(q)= ql +2
1
ql1 + . . . , S(q)= ql +l+2
1
ql1 + . . .
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 15/20
Di S lf T i f Mi i Ph S
-
7/22/2019 Lecture 07 EAILC
41/55
Direct Self-Tuning for Minimum-Phase Systems
Some modification to the regression model
Ao(q)Am(q)y(t) = (t) = b0R(q)u(t)+b0S(q)y(t) = (t)T
can be made if we introduce the signals
uf(t) = 1
Ao(q)Am(q)u(t), yf(t) =
1
Ao(q)Am(q)y(t)
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 16/20
Di t S lf T i f Mi i Ph S t
-
7/22/2019 Lecture 07 EAILC
42/55
Direct Self-Tuning for Minimum-Phase Systems
Some modification to the regression model
Ao(q)Am(q)y(t) = (t) = b0R(q)u(t)+b0S(q)y(t) = (t)T
can be made if we introduce the signals
uf(t) = 1
Ao(q)Am(q)u(t), yf(t) =
1
Ao(q)Am(q)y(t)
Then the regression model is
y(t) = b0R(q)uf(t) + b0S(q)yf(t)
= R(q)uf(t) + S(q)yf(t)
= (t)T
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 16/20
Di t S lf T i R l t S
-
7/22/2019 Lecture 07 EAILC
43/55
Direct Self-Tuning Regulators: Summary
Given polynomialsAm(q),Bm(q),Ao(q)
the relative degreed0 of the plant (deg Ao = d0 1)
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 17/20
Direct Self Tuning Regulators: Summary
-
7/22/2019 Lecture 07 EAILC
44/55
Direct Self-Tuning Regulators: Summary
Given polynomialsAm(q),Bm(q),Ao(q)
the relative degreed0 of the plant (deg Ao = d0 1)
Step 1: Estimate coefficients of polynomialsR(q)andS(q)
from the regression model
y(t) = b0R(q)uf(t) + b0S(q)yf(t) = (t)T
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 17/20
Direct Self Tuning Regulators: Summary
-
7/22/2019 Lecture 07 EAILC
45/55
Direct Self-Tuning Regulators: Summary
Given polynomialsAm(q),Bm(q),Ao(q)
the relative degreed0 of the plant (deg Ao = d0 1)
Step 1: Estimate coefficients of polynomialsR(q)andS(q)
from the regression model
y(t) = b0R(q)uf(t) + b0S(q)yf(t) = (t)T
Step 2: Compute the control signal by
R(q)u(t) = T(q)uc(t) S(q)y(t)
where forBm(q) = qd0Am(1) (minimal delay and unit static gain):
T(q)= Ao(q)Am(1)
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 17/20
Direct Self Tuning Regulators: Summary
-
7/22/2019 Lecture 07 EAILC
46/55
Direct Self-Tuning Regulators: Summary
Given polynomialsAm(q),Bm(q),Ao(q)
the relative degreed0 of the plant (deg Ao = d0 1)
Step 1: Estimate coefficients of polynomialsR(q)andS(q)
from the regression model
y(t) = b0R(q)uf(t) + b0S(q)yf(t) = (t)T
Step 2: Compute the control signal by
R(q)u(t) = T(q)uc(t) S(q)y(t)
where forBm(q) = qd0Am(1) (minimal delay and unit static gain):
T(q)= Ao(q)Am(1)
Repeat Steps 1 and 2
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 17/20
Direct ST Reg for Non Minimum Phase Systems
-
7/22/2019 Lecture 07 EAILC
47/55
Direct ST Reg. for Non-Minimum-Phase Systems
IfB(q)is not stable or cannot be canceled, i.e.
A(q) y(t) = B(q) u(t)
= b0u(td0) + b1u(td01) + + bmu(td0m)
= B+(q)B(q)u(t), B(q) const
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 18/20
Direct ST Reg for Non-Minimum-Phase Systems
-
7/22/2019 Lecture 07 EAILC
48/55
Direct ST Reg. for Non-Minimum-Phase Systems
IfB(q)is not stable or cannot be canceled, i.e.
A(q) y(t) = B(q) u(t)
= b0u(td0) + b1u(td01) + + bmu(td0m)
= B+(q)B(q)u(t), B(q) const
then Diophantine equation
Ao(q)Am(q)= A(q)R(q)+ B
(q)S(q)
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 18/20
Direct ST Reg for Non-Minimum-Phase Systems
-
7/22/2019 Lecture 07 EAILC
49/55
Direct ST Reg. for Non Minimum Phase Systems
IfB(q)is not stable or cannot be canceled, i.e.
A(q) y(t) = B(q) u(t)
= b0u(td0) + b1u(td01) + + bmu(td0m)
= B+(q)B(q)u(t), B(q) const
then Diophantine equation
Ao(q)Am(q)= A(q)R(q)+ B
(q)S(q)leads to the regression
Ao(q)Am(q)y(t) = B(q) R(q)u(t) + S(q)y(t)
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 18/20
Direct ST Reg for Non-Minimum-Phase Systems
-
7/22/2019 Lecture 07 EAILC
50/55
Direct ST Reg. for Non Minimum Phase Systems
IfB(q)is not stable or cannot be canceled, i.e.
A(q) y(t) = B(q) u(t)
= b0u(td0) + b1u(td01) + + bmu(td0m)
= B+(q)B(q)u(t), B(q) const
then Diophantine equation
Ao(q)Am(q)= A(q)R(q)+ B
(q)S(q)leads to the regression
Ao(q)Am(q)y(t) = B(q) R(q)u(t) + S(q)y(t)
which is nonlinear in parameters and has unstable factor
(t) = B
(q)
R(q)u(t) + S(q)y(t)
= (t 1)T
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 18/20
Direct Self-Tuning Regulators: Summary
-
7/22/2019 Lecture 07 EAILC
51/55
Direct Self Tuning Regulators: Summary
Given
polynomialsAm(q),Bm(q),Ao(q)
the relative degreed0 of the plant
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 19/20
Direct Self-Tuning Regulators: Summary
-
7/22/2019 Lecture 07 EAILC
52/55
Direct Self Tuning Regulators: Summary
Given
polynomialsAm(q),Bm(q),Ao(q)
the relative degreed0 of the plant
Step 1: Estimate coefficients of R(q)and S(q)from
y(t) = R(q)uf(t) + S(q)yf(t) = (t)T
Cancel possible common factors of R(q)and S(q)to computeR(q)andS(q)
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 19/20
Direct Self-Tuning Regulators: Summary
-
7/22/2019 Lecture 07 EAILC
53/55
g g y
Given
polynomialsAm(q),Bm(q),Ao(q)
the relative degreed0 of the plant
Step 1: Estimate coefficients of R(q)and S(q)from
y(t) = R(q)uf(t) + S(q)yf(t) = (t)T
Cancel possible common factors of R(q)and S(q)to computeR(q)andS(q)
Step 2: Compute the control signal by
R(q)u(t) = T(q)uc(t) S(q)y(t)where
T(q)= Ao(q)Bmp(q)
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 19/20
Direct Self-Tuning Regulators: Summary
-
7/22/2019 Lecture 07 EAILC
54/55
g g y
Given
polynomialsAm(q),Bm(q),Ao(q)
the relative degreed0 of the plant
Step 1: Estimate coefficients of R(q)and S(q)from
y(t) = R(q)uf(t) + S(q)yf(t) = (t)T
Cancel possible common factors of R(q)and S(q)to computeR(q)andS(q)
Step 2: Compute the control signal by
R(q)u(t) = T(q)uc(t) S(q)y(t)where
T(q)= Ao(q)Bmp(q)
Repeat Steps 1 and 2
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 19/20
Next Lecture / Assignments:
-
7/22/2019 Lecture 07 EAILC
55/55
g
Next meeting (April 26, 13:00-15:00, in A205Tekn).
Homework problems: Consider the process:
G(s) = 1
s(s + a), whereais an unknown parameter. Assume
that the desired closed-loop system is
Gm(s) = 2
s2 + 2s + 2. Construct
continuous-time indirect algorithm,
discrete-time indirect algorithm, continuous-time direct algorithm,
discrete-time direct algorithm.
c Leonid Freidovich. A ril 22, 2010. Elements of Iterative Learnin and Ada tive Control: Lecture 7 . 20/20