
Least Square ++ Camera 3D Registration 3D triangulation...
47
Least Square ++ 3D triangulation + camera registration Slides by HyunSoo Park
Transcript of Least Square ++ Camera 3D Registration 3D triangulation...

Camera 3D Registration Perspective-n-Point Algorithm
LeastSquare++3Dtriangulation+cameraregistration
SlidesbyHyunSoo Park

1809,CarlFriedrichGauss

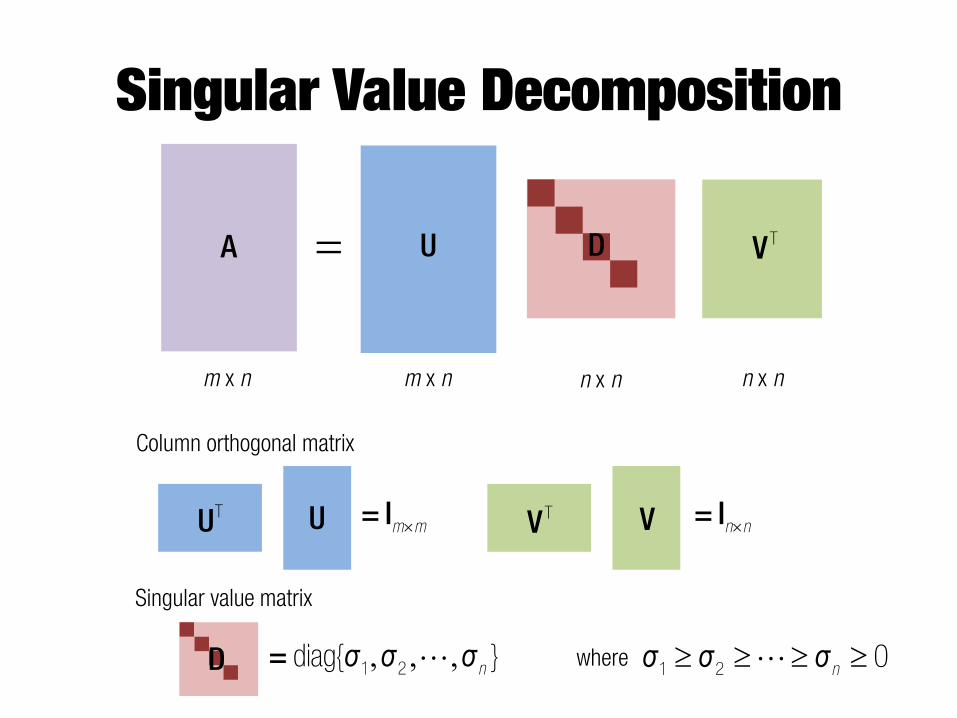
Singular Value Decomposition
A U= D VT
m x n m x n n x n n x n
U
Column orthogonal matrix
UTu= Im m VVT
u= In n
spans column space of A spans row space of A
Singular Value Decomposition
A U= D VT
m x n m x n n x n n x n
U
Column orthogonal matrix
UTu= Im m VVT
u= In n
Singular value matrix
D , , ,= n"ı ı ı1 2diag{ } t t t tn"ı ı ı1 2 0where

Example I A = 0.9501 0.8913 0.8214 0.9218 0.2311 0.7621 0.4447 0.7382 0.6068 0.4565 0.6154 0.1763 0.4840 0.0185 0.7919 0.4057
[u,d,v] = svd(A) u = -0.7302 -0.1240 -0.1909 -0.6442 -0.4415 -0.6333 0.3797 0.5098 -0.3809 0.3258 -0.6565 0.5637 -0.3560 0.6910 0.6232 0.0859 d = 2.4475 0 0 0 0 0.6710 0 0 0 0 0.3652 0 0 0 0 0.1928 v = -0.4900 0.3993 -0.5212 -0.5734 -0.4771 -0.6432 -0.4626 0.3803 -0.5363 0.5428 0.2781 0.5835 -0.4946 -0.3636 0.6611 -0.4314

Example I A = 0.9501 0.8913 0.8214 0.9218 0.2311 0.7621 0.4447 0.7382 0.6068 0.4565 0.6154 0.1763 0.4840 0.0185 0.7919 0.4057
u*d*v' ans = 0.9501 0.8913 0.8214 0.9218 0.2311 0.7621 0.4447 0.7382 0.6068 0.4565 0.6154 0.1763 0.4840 0.0185 0.7919 0.4057
Reconstruction

SVDofthis?
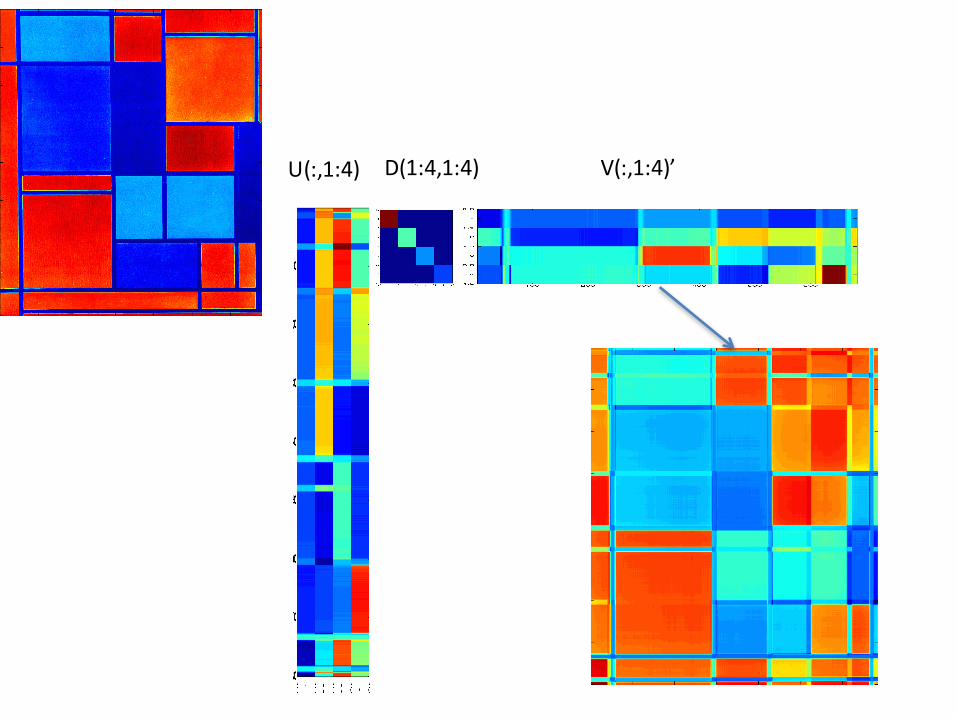
U(:,1:4) D(1:4,1:4) V(:,1:4)’

[u,d,v]=svd(I); semilogy(diag(d(1:20,1:20)),'x-')
Im2=u(:,1:20)*d(1:20,1:20)*v(:,1:20)';


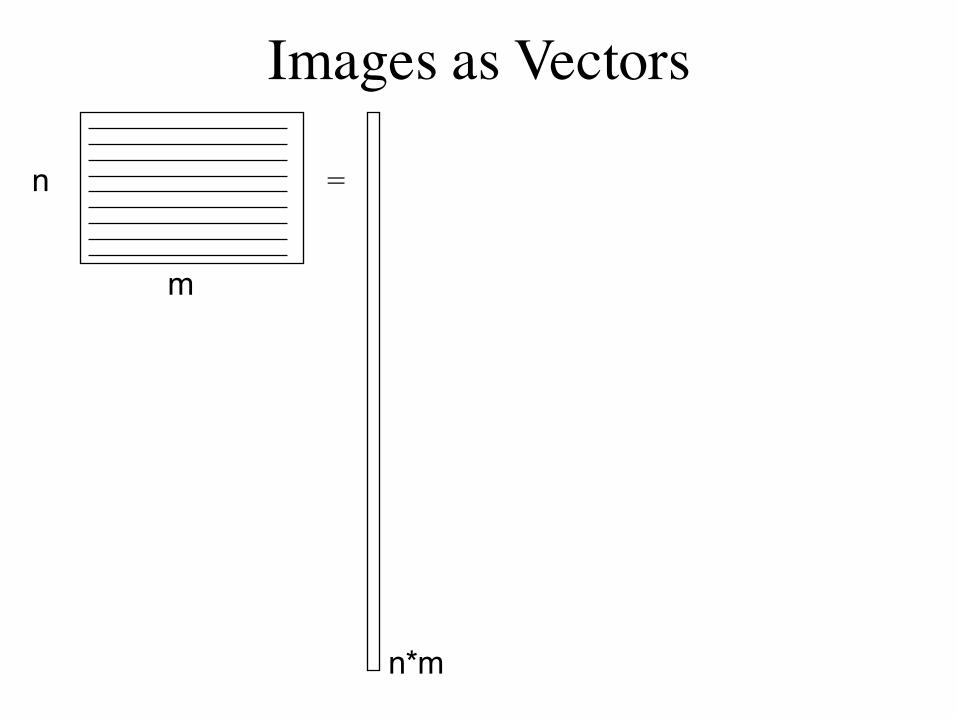
Images as Vectors
=
m
n
n*m

Vector Mean
=
m
n
n*m
=
n*m
I1 + I2 = mean image

Average face…

Eigenfaces
Eigenfaces look somewhat like generic faces.

Eigen-imagesofBerlin
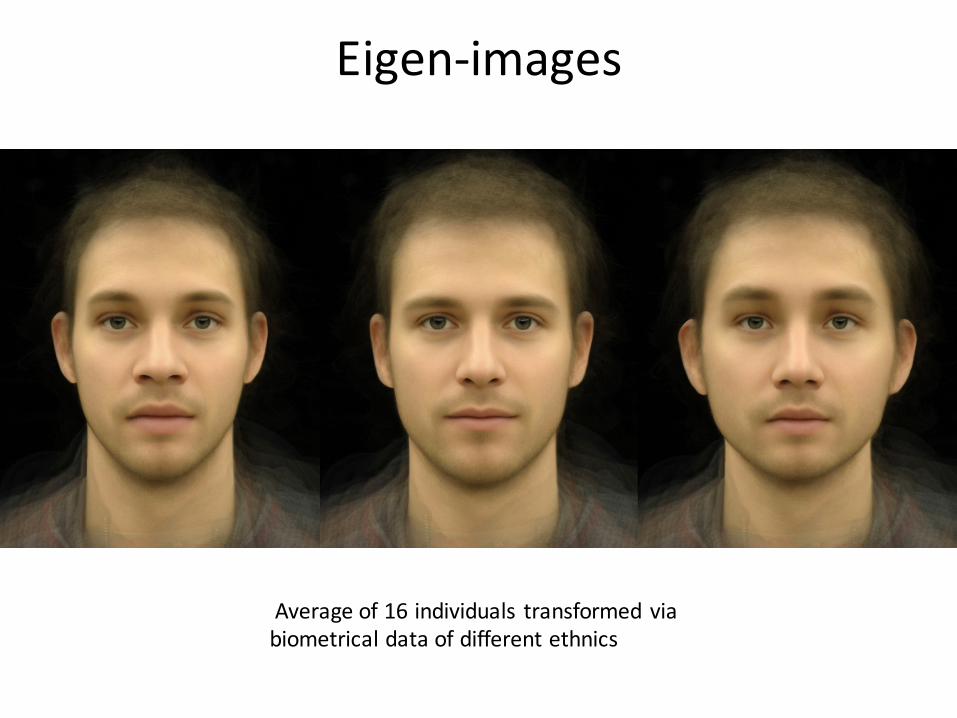
Eigen-images
Averageof16individuals transformedviabiometricaldataofdifferentethnics

Averageof16individuals transformedviabiometricaldataofdifferentages

Example II (Rotation)
XZ
23ʌș
� �e = + +1
3i j k ª º
« »« »« »¬ ¼
R =0 0 1
1 0 0
0 1 0
>> [u,d,v] = svd(R) u = 0 0 1 -1 0 0 0 -1 0 d = 1 0 0 0 1 0 0 0 1
v = -1 0 0 0 -1 0 0 0 1
Note that singular values are always one for a rotation matrix
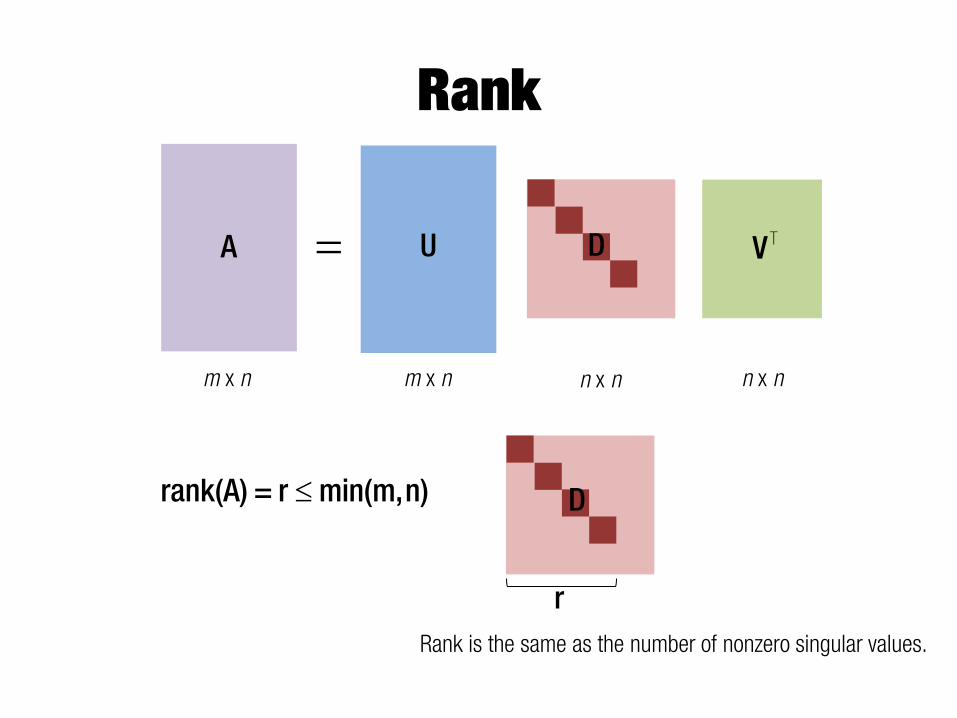
Rank
A U= D VT
m x n m x n n x n n x n
drank(A) = r min(m,n) D
Rank is the same as the number of nonzero singular values.
r
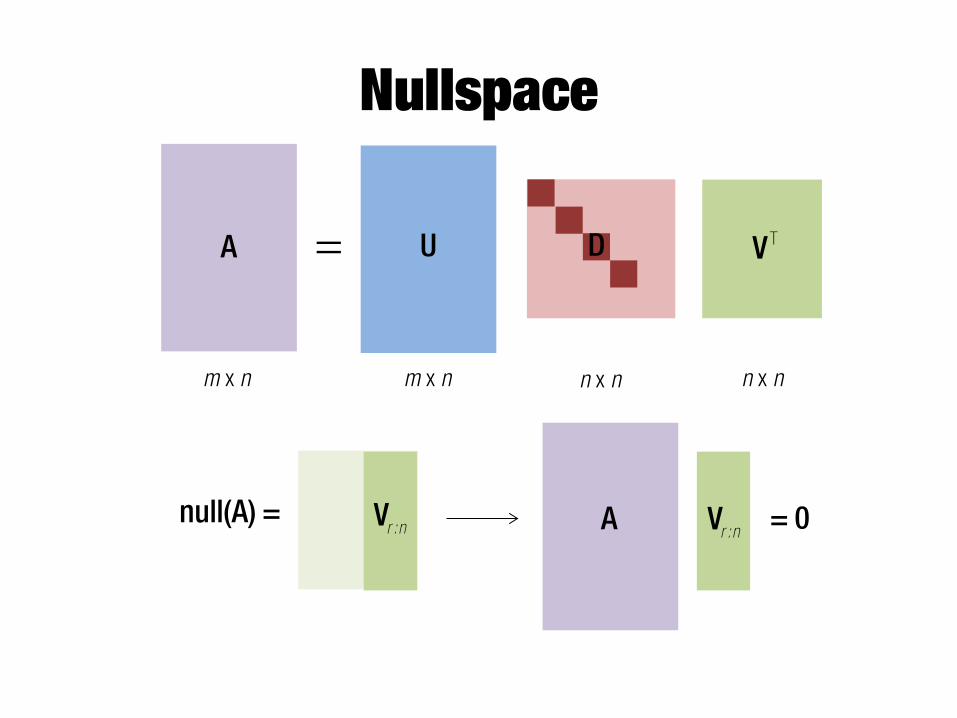
Nullspace
A U= D VT
m x n m x n n x n n x n
null(A) = Vr :n Vr :nA = 0

Example III (Fundamental Matrix)
F = 1.0e+003 * -0.0000 0.0000 0.0030 -0.0001 0.0002 0.0564 0.0132 -0.0292 -9.9998
[u,d,v] = svd(F) u = -0.0003 0.9981 0.0618 -0.0056 -0.0618 0.9981 1.0000 -0.0001 0.0056 d = 1.0e+004 * 1.0000 0 0 0 0.0000 0 0 0 0.0000
v = 0.0013 -0.9660 0.2586 -0.0029 -0.2586 -0.9660 -1.0000 -0.0005 0.0032
d(1,1) ans = 1.0000e+004 d(2,2) ans = 0.0021 d(3,3) ans = 2.7838e-016
Rank(F) = 2
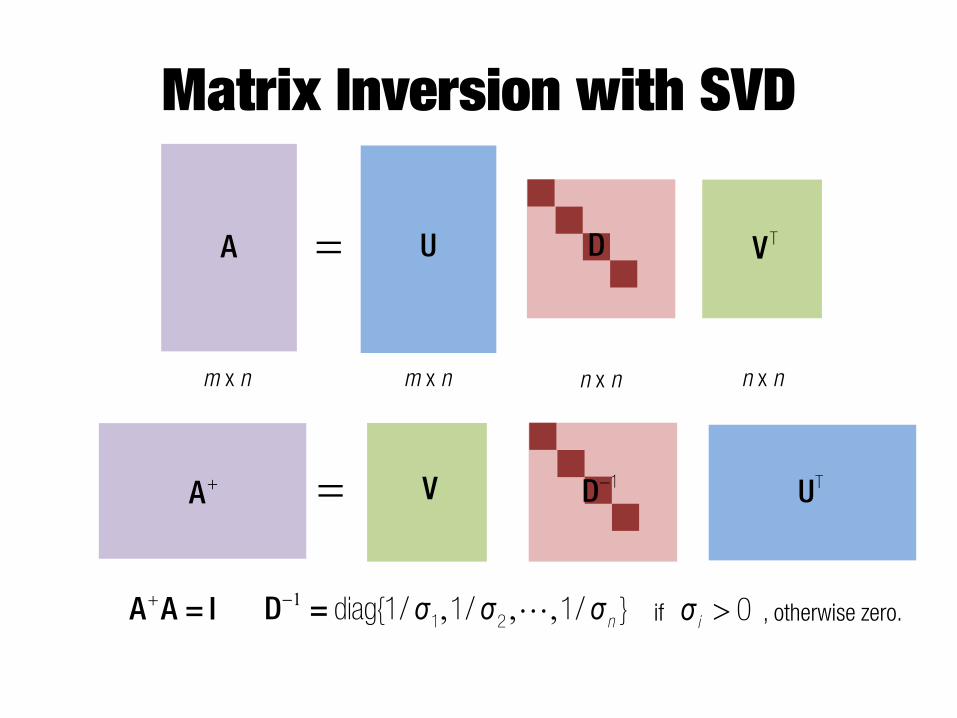
Matrix Inversion with SVD
A U= D VT
m x n m x n n x n n x n
�A UT= �D 1V
1 , , ,�D = n"ı ı ı1 2diag{1/ 1/ 1/ } if , otherwise zero. !iı 0�A A = I
2
7
The SVD and Spectral Decomposition
Let A = UVT be an SVD
with = diag(�1, . . . , �c) and V = (v1 · · · vc)
We have that
the �i are the square root of the eigenvalues of ATA
the vi are the eigenvectors of ATA
Proof
ATA = VTUTUVT = V2VT 8
Kernel, Rank and the SVD
SVD0
A VU
T
The rank is 2
The left kernel has dimension 5� 2 = 3
The right kernel has dimension 3� 2 = 1
Basis for the right kernel
Partial basis for the left kernel
F Vector x is in the right kernel of A i& Ax = 0
F Vector y is in the left kernel of A i& yTA = 0T
F The rank k of matrix A is the number of nonzero singular values(0 � k � min(r, c))
F The right kernel has dimension c� k
F The left kernel has dimension r � k
9
Linear Least Squares (LLS) Optimization: Problem Statement
minx;Rn
kAx� bk2 s.t. C(x) = 0
minx;Rn
mX
j=1
¡aTj x� bj
¢2s.t. C(x) = 0
A(m×n) =
C
hhH
.
.
.
aTj...
I
nnO and b(m×1) =
C
hhH
.
.
.
bj...
I
nnO
m ‘equations’ and n ‘unknowns’
‘constraints’ means both ‘equations’ and ‘unknowns’ and is thus ambiguous
10
A Bit of History…
� 1795 – discovery of Least Squares by Gauss� 1801 – used by Gauss in astronomical calculations
(prediction of the orbit of the asteroid Ceres)� 1805 – publication of an algebraic procedure by
Legendre (dispute with Gauss)� The method quickly became the standard procedure
(for analysis of astronomical and geodetic data)� 1809, 1821, 1823 – statistical justification by Gauss� 1912 – rediscovery by Markov
11
Why Least Squares?
� Assume the noise on b is Independently and Identically Distributed (i.i.d.)
� Least Squares gives the Best Linear Unbiased Estimator (BLUE) – best = minimum variance
� Assume further that the noise on the data follows a gaussian distribution
� The Maximum Likelihood Estimator (MLE) is obtained by Least Squares
12
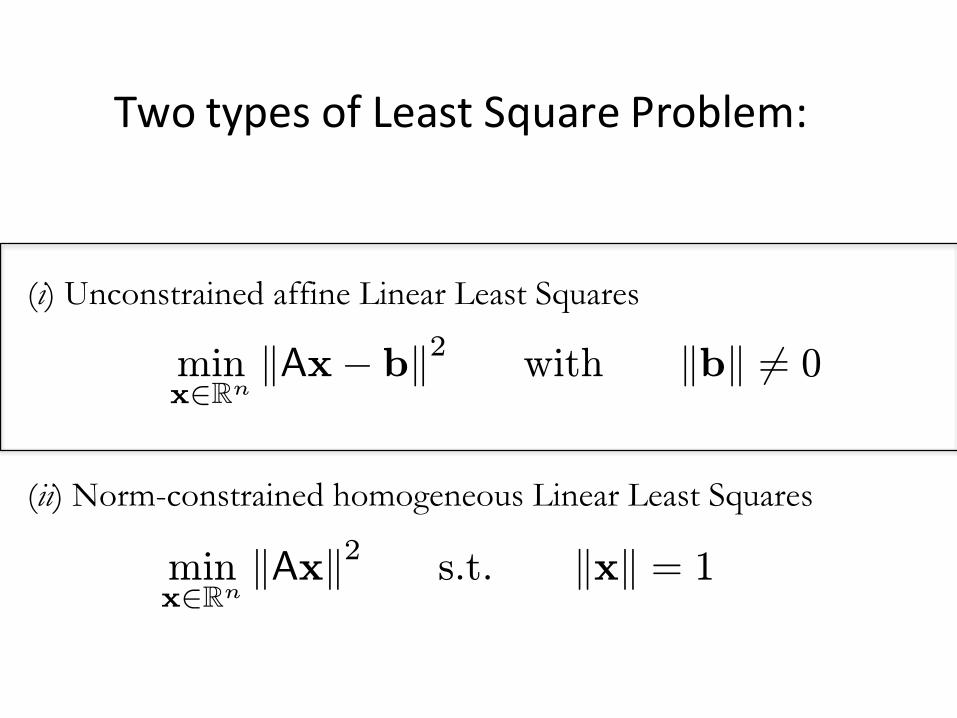
Two Cases of Interest
� (i) Unconstrained affine Linear Least Squares
� (ii) Norm-constrained homogeneous Linear Least Squares
� Notes� Both problems frequently appear in Computer Vision
(and in scientific computing in general)� (ii) handles (i) while (i) does not always handle (ii)
minx;Rn
kAx� bk2 with kbk 6= 0
minx;Rn
kAxk2 s.t. kxk = 1
TwotypesofLeastSquareProblem:

Least squares methods- fitting a line -
• Data: (x1, y1), …, (xn, yn)
• Line equation: yi = m xi + b
• Find (m, b) to minimize
¦ ��
n
i ii bxmyE1
2)(
(xi, yi)
y=mx+b
SilvioSavarese

022 � YXXBXdBdE TT
> @ 2
2
n
1
n
1n
1i
2
ii XBYbm
1x
1x
y
y
bm
1xyE � »¼
º«¬
ª
»»»
¼
º
«««
¬
ª�
»»»
¼
º
«««
¬
ª ¸̧
¹
·¨̈©
§»¼
º«¬
ª� ¦
���
Normal equation
¦ ��
n
i ii bxmyE1
2)(
YXXBX TT
Least squares methods- fitting a line -
� � YXXXB T1T �
)XB()XB(Y)XB(2YY)XBY()XBY( TTTT �� ��
SilvioSavarese
=
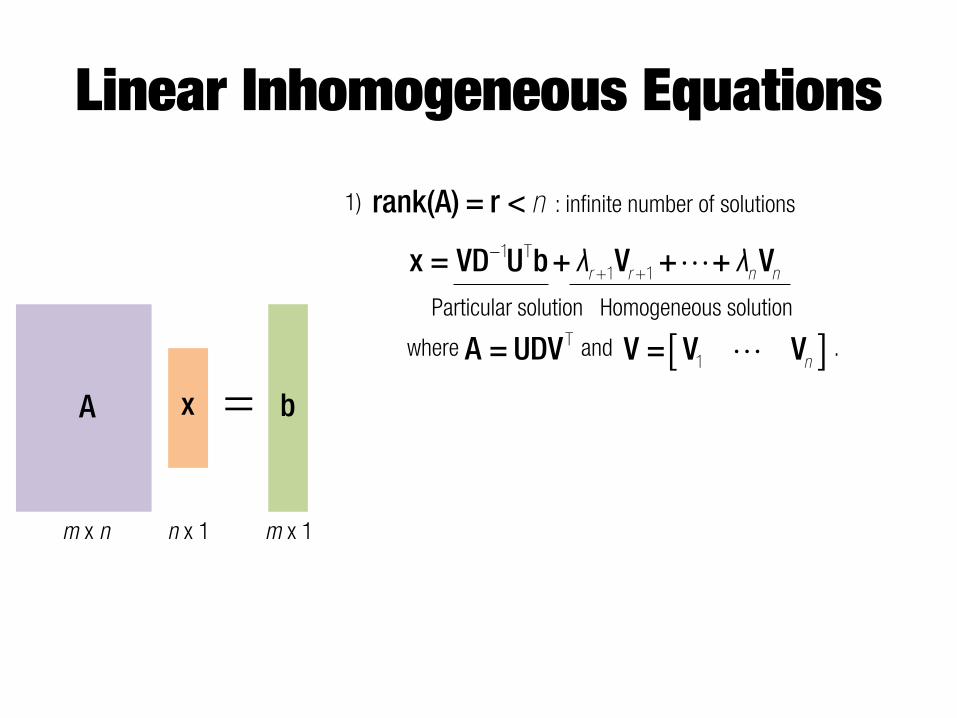
Linear Inhomogeneous Equations
A x b
m x n n x 1 m x 1
rank(A) = r < n : infinite number of solutions
�x = VD U b+ V + + Vr r n n"Ȝ Ȝ1 T+1 +1
Particular solution Homogeneous solution
where and . A = UDV T > @V = V Vn"1
1)

=
Linear Inhomogeneous Equations
A x b
m x n n x 1 m x 1
rank(A) = r < n : infinite number of solutions
rank(A) = n : exact solution
�x = VD U b+ V + + Vr r n n"Ȝ Ȝ1 T+1 +1
Particular solution Homogeneous solution
where and . A = UDV T > @V = V Vn"1
�x = A b1
1)
2)

=
Linear Inhomogeneous Equations
A x b
m x n n x 1 m x 1
rank(A) = r < n : infinite number of solutions
rank(A) = n : exact solution
�n m : no exact solution in general (needs least squares)
�x = VD U b+ V + + Vr r n n"Ȝ Ȝ1 T+1 +1
Particular solution Homogeneous solution
where and . A = UDV T > @V = V Vn"1
�x = A b1
� �x = A A A b-1T T
xmin Ax -b 2
Î
or in MATLAB. x = A \ b
1)
2)
3)

Least squares methods- fitting a line -
• Data: (x1, y1), …, (xn, yn)
• Line equation: yi = m xi + b
• Find (m, b) to minimize
¦ ��
n
i ii bxmyE1
2)(
(xi, yi)
y=mx+b
SilvioSavarese

022 � YXXBXdBdE TT
> @ 2
2
n
1
n
1n
1i
2
ii XBYbm
1x
1x
y
y
bm
1xyE � »¼
º«¬
ª
»»»
¼
º
«««
¬
ª�
»»»
¼
º
«««
¬
ª ¸̧
¹
·¨̈©
§»¼
º«¬
ª� ¦
���
Normal equation
¦ ��
n
i ii bxmyE1
2)(
YXXBX TT
Least squares methods- fitting a line -
� � YXXXB T1T �
)XB()XB(Y)XB(2YY)XBY()XBY( TTTT �� ��
SilvioSavarese

2
7
The SVD and Spectral Decomposition
Let A = UVT be an SVD
with = diag(�1, . . . , �c) and V = (v1 · · · vc)
We have that
the �i are the square root of the eigenvalues of ATA
the vi are the eigenvectors of ATA
Proof
ATA = VTUTUVT = V2VT 8
Kernel, Rank and the SVD
SVD0
A VU
T
The rank is 2
The left kernel has dimension 5� 2 = 3
The right kernel has dimension 3� 2 = 1
Basis for the right kernel
Partial basis for the left kernel
F Vector x is in the right kernel of A i& Ax = 0
F Vector y is in the left kernel of A i& yTA = 0T
F The rank k of matrix A is the number of nonzero singular values(0 � k � min(r, c))
F The right kernel has dimension c� k
F The left kernel has dimension r � k
9
Linear Least Squares (LLS) Optimization: Problem Statement
minx;Rn
kAx� bk2 s.t. C(x) = 0
minx;Rn
mX
j=1
¡aTj x� bj
¢2s.t. C(x) = 0
A(m×n) =
C
hhH
.
.
.
aTj...
I
nnO and b(m×1) =
C
hhH
.
.
.
bj...
I
nnO
m ‘equations’ and n ‘unknowns’
‘constraints’ means both ‘equations’ and ‘unknowns’ and is thus ambiguous
10
A Bit of History…
� 1795 – discovery of Least Squares by Gauss� 1801 – used by Gauss in astronomical calculations
(prediction of the orbit of the asteroid Ceres)� 1805 – publication of an algebraic procedure by
Legendre (dispute with Gauss)� The method quickly became the standard procedure
(for analysis of astronomical and geodetic data)� 1809, 1821, 1823 – statistical justification by Gauss� 1912 – rediscovery by Markov
11
Why Least Squares?
� Assume the noise on b is Independently and Identically Distributed (i.i.d.)
� Least Squares gives the Best Linear Unbiased Estimator (BLUE) – best = minimum variance
� Assume further that the noise on the data follows a gaussian distribution
� The Maximum Likelihood Estimator (MLE) is obtained by Least Squares
12
Two Cases of Interest
� (i) Unconstrained affine Linear Least Squares
� (ii) Norm-constrained homogeneous Linear Least Squares
� Notes� Both problems frequently appear in Computer Vision
(and in scientific computing in general)� (ii) handles (i) while (i) does not always handle (ii)
minx;Rn
kAx� bk2 with kbk 6= 0
minx;Rn
kAxk2 s.t. kxk = 1
TwotypesofLeastSquareProblem:

Least squares methods- fitting a line -
¦ ��
n
1i2
ii )bxmy(E
(xi, yi)
y=mx+b
� � YXXXB T1T � »
¼
º«¬
ª
bm
B
• Not rotation-invariant• Fails completely for vertical lines
Limitations

• Distance between point (xn, yn) and line ax+by=d
• Find (a, b, d) to minimize the sum of squared perpendicular distances
ax+by=d
¦ ��
n
i ii dybxaE1
2)((xi, yi)
0N)UU( T data model parameters
Least squares methods- fitting a line -
2
664
x1 y1 �1x2 y2 �1· · · · · · �1xm ym �1
3
775 = 0
2
4abd
3
5
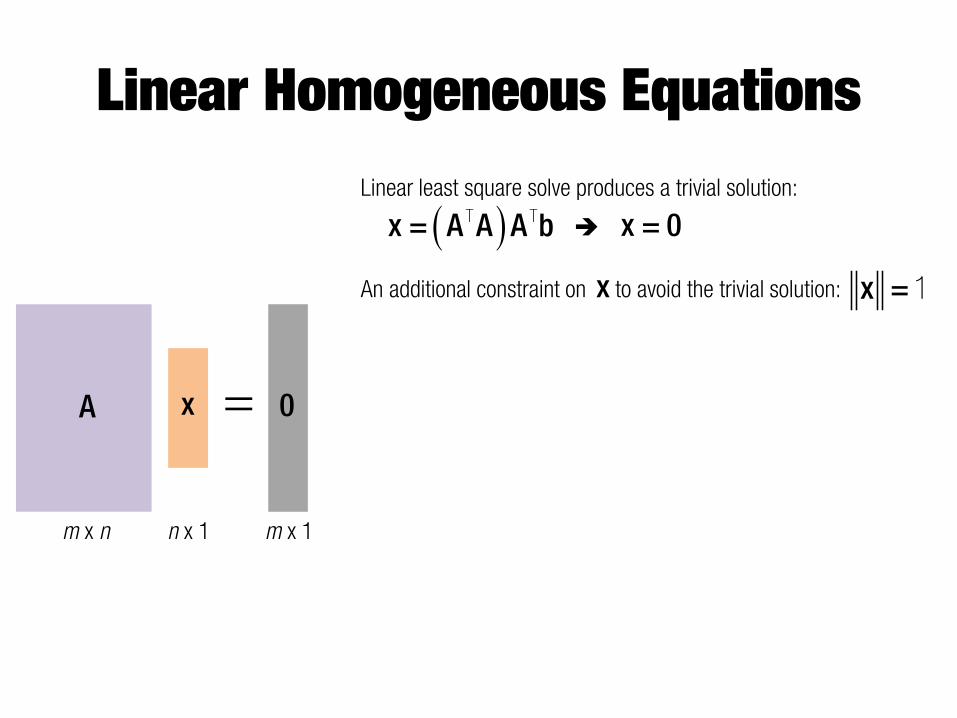
Linear Homogeneous Equations
= A x 0
m x n n x 1 m x 1
Linear least square solve produces a trivial solution:
x = 0� �x = A A A bT TÎ
An additional constraint on to avoid the trivial solution: x x = 1

Linear Homogeneous Equations
= A x 0
m x n n x 1 m x 1
Linear least square solve produces a trivial solution:
x = 0� �x = A A A bT TÎ
An additional constraint on to avoid the trivial solution: x x = 1
rank(A) = <r n -1 : infinite number of solutions
x = V + + Vr r n n"Ȝ Ȝ+1 +1 ¦
n
ii = r
Ȝ2+1
1where
1)

Linear Homogeneous Equations
= A x 0
m x n n x 1 m x 1
Linear least square solve produces a trivial solution:
x = 0� �x = A A A bT TÎ
An additional constraint on to avoid the trivial solution: x x = 1
rank(A) = <r n -1 : infinite number of solutions
x = V + + Vr r n n"Ȝ Ȝ+1 +1
rank(A) = n -1 : one exact solution
x = Vn
¦n
ii = r
Ȝ2+1
1where
1)
2)

Linear Homogeneous Equations
= A x 0
m x n n x 1 m x 1
Linear least square solve produces a trivial solution:
x = 0� �x = A A A bT TÎ
An additional constraint on to avoid the trivial solution: x x = 1
rank(A) = <r n -1 : infinite number of solutions
x = V + + Vr r n n"Ȝ Ȝ+1 +1
rank(A) = n -1 : one exact solution
x = Vn
¦n
ii = r
Ȝ2+1
1where
�n m : no exact solution in general (needs least squares)
xmin Ax 2
Î subject to x = 1 x = Vn
1)
2)
3)

• Distance between point (xn, yn) and line ax+by=d
• Find (a, b, d) to minimize the sum of squared perpendicular distances
ax+by=d
¦ ��
n
i ii dybxaE1
2)((xi, yi)
0N)UU( T data model parameters
Least squares methods- fitting a line -
2
664
x1 y1 �1x2 y2 �1· · · · · · �1xm ym �1
3
775 = 0
2
4abd
3
5
4
19
Demonstration
Let C(x) = 1� kxk2 be the constraint
Let E(x) = kAxk2 be the cost function
We must have:
(L(x
= 0 and(L(
= 0
The lagrangian is L(x) = E(x) + C(x), with a Lagrange multiplier
20
Demonstration
(L(x
= 2ATAx� 2x and(L(
= 1� kxk2 = C(x)
We get:
From which:
ATAx = x and C(x) = 0
p is an eigenvalue of ATA and x an (normalized) eigenvector
p is a squared singular value of A and x a singular vector
Asvd�� UVT
Let an SVD (Singular Value Decomposition) of matrix A be:
We have x = vi with i ; {1, . . . , n}
21
DemonstrationPlug x = vi back in the cost function E(x) = kAxk2:
E(vi) = kAvik2 = kUVTvik2
Since V is an orthonormal matrix, VTvi = ei (ei is a zero vectorwith one at the i-th entry):
E(vi) = kUeik2 = kU�ieik2
Let U = (u1 · · · un), we get:
E(vi) = k�iuik2 = �2i kuik2
Given that U is orthonormal:
E(vi) = �2i
We therefore choose for x the singular vector associated to thesmallest singular value, which concludes the proof. 22
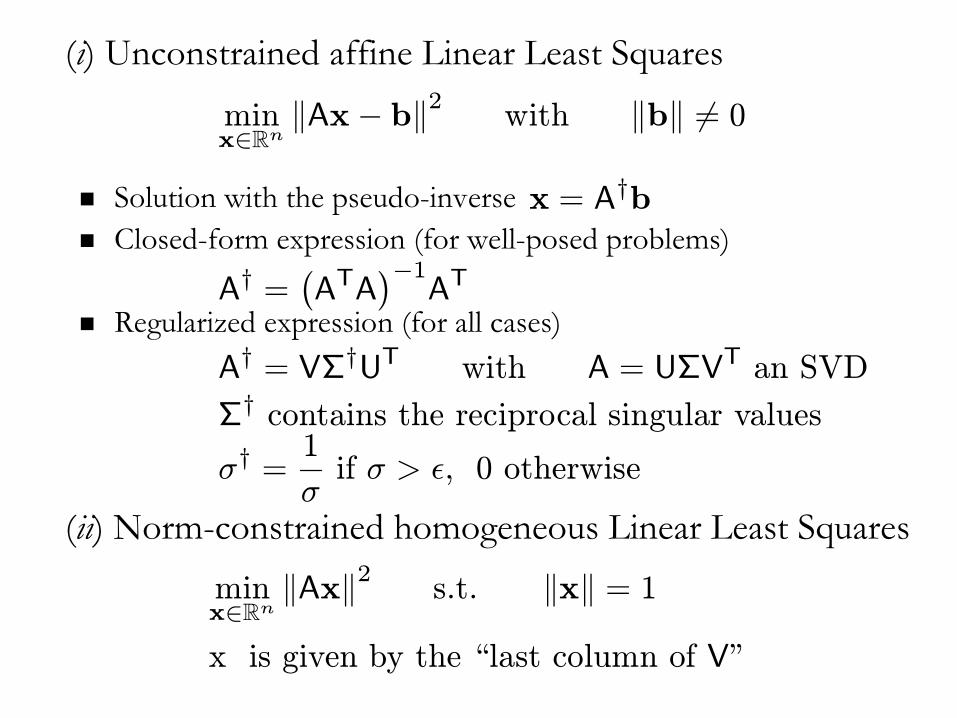
Summary and Closure� (i) Unconstrained affine Linear Least Squares
� Solution with the pseudo-inverse� Closed-form expression (for well-posed problems)
� Regularized expression (for all cases)
� (ii) Norm-constrained homogeneous Linear Least Squares
minx;Rn
kAx � bk2 with kbk 6= 0
x = A†b
A† =¡ATA
¢�1AT
A† = V†UT with A = UVT an SVD
† contains the reciprocal singular values
minx;Rn
kAxk2 s.t. kxk = 1
�† =1
�if � > ², 0 otherwise
x is given by the “last column of V”
23
A Quick Exercise
We define
mX
j=1
(yj � p(xj))2 � min
The goal of the exercise is to show how to fit apolynomial p of degree z to these points so that
p(x) =
zX
i=0
aixi
Let {(xj , yj)} be a set of 2D points, with j = 1, . . . , m
24
Questions
� Show that there exists a Linear Least Squares solution to this problem� Give the design matrix� Explain how to obtain the unknown coefficients
� What is the cost function minimized by the Linear Least Squares solution? how do you interpret it?

Homography Linear Estimation
x = Hx2 1
ª º« » « »« »¬ ¼
xuv1
1 1
1
ª º« » « »« »¬ ¼
Hh h hh h hh h h
11 12 13
21 22 23
31 32 33
ª º« » « »« »¬ ¼
xuv2
2 2
1
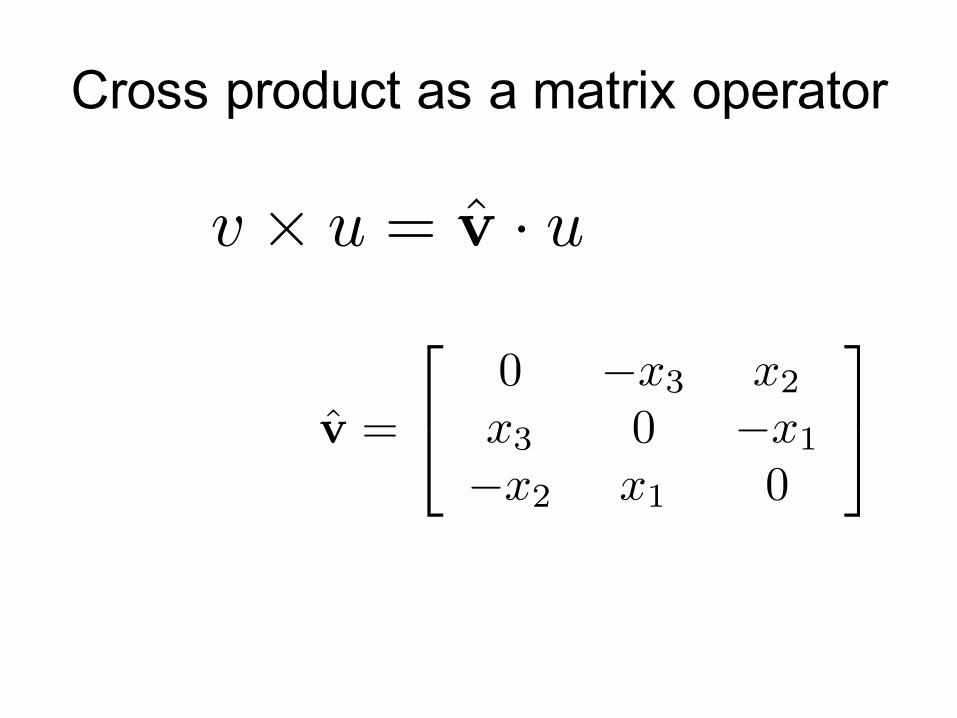
Cross product as a matrix operator
v ⇥ u = v̂ · u
v̂ =
2
40 �x3 x2
x3 0 �x1
�x2 x1 0
3
5

Homography Linear Estimation
x = Hx2 1
ª º« » « »« »¬ ¼
xuv1
1 1
1
> @u x Hx 02 1
u
�ª º ª º ª º« » « » « » � « » « » « »« » « » « »�¬ ¼ ¬ ¼ ¬ ¼
h h x h xh x h x h x 0h h x h x
u vv u
u v
2 1 2 3 1 2 1
2 2 1 1 1 2 3 1
3 2 2 1 2 1 11
u
u
u
ª º ª º�« » « »� « » « »« » « »�¬ ¼ ¬ ¼
0 x x hx 0 x h 0x x 0 h
vu
v u
T T T1 3 1 2 1 1T T T1 1 3 2 1 2
T T T2 1 2 1 1 3 3
3 x 9
rank( ) = 2 > @ux2because is a rank 2 matrix.
Therefore, 4 point correspondences are required to estimate a homography.

Fundamental Matrix Estimation
x FxT2 1 0
ª º« » « »« »¬ ¼
xuv1
1 1
1
ª º« » « »« »¬ ¼
xuv2
2 2
1

Fundamental Matrix Estimation x FxT
2 1 0
� � � � � � � � u u f u v f u f v u f v v f v f u f v f f2 1 11 2 1 12 2 13 2 1 21 2 1 22 2 23 1 31 1 32 33 0
ª º ª º ª º« » « » « » « » « » « »« » « » « »¬ ¼ ¬ ¼ ¬ ¼
u f f f uv f f f v
f f f
T
2 11 12 13 1
2 21 22 23 1
31 32 33
0
1 1
ª º« »« »« »« »
ª º « »« » « » « » « »« » « »¬ ¼
« »« »« »« »¬ ¼
0
fff
u u u v u v u v v v u v ffffff
# # # # # # # # #
11
12
13
2 1 2 1 2 2 1 2 1 2 1 1 21
22
23
31
32
33
1
9
Therefore, 8 point correspondences are required to estimate a fundamental matrix.

Problem: squared error heavily penalizes outliers
Least squares: Robustness to noise
outlier!
SilvioSavarese



















