
Launcher Programming Guide (ROBOTC - TETRIX … · Note: A comment is not part of the code that the...
7
235 Introduction: In this guide, the Ranger Bot will be programmed to follow a line while carrying a ball. Upon sensing a bin with its ultrasonic sensor, it will launch the ball into the bin. This guide is for use with the ROBOTC ® programming language. Getting Started: 1. To start the program, type the Main Task function followed by an opening brace. task main() { 2. Declare three integer variables as seen in the code below. Beside each variable, there are two slashes (//) followed by what that variable is representing. These mark a comment. Notice that comments appear green when code is typed into ROBOTC. Note: A comment is not part of the code that the NXT Brick will execute, but it helps the programmer by allowing the addition of notes to describe what has been done. int nValue; // light sensor value int mValue; // sonar sensor value int Position; // servo arm position 3. Type the Wait function and set it to wait 50 milliseconds to allow the robot to initialize motors and sensors. wait1Msec(50); 4. Type the servo position command to initialize the position of the servo. This must be set to a value between 0 and 255, representing a position between 0° and 180°, the servo’s full range of motion. servo[servo1] = 128; 5. Add a While Loop to wait until the touch sensor has been touched in order for motorD and motorE to start moving. If the touch sensor has been pressed then the value of the touch sensor, at that moment, would be 1; otherwise, the value of the touch sensor will be zero. Thus, the condition for the While Loop statement would be to check if the touch sensor value is equal to zero in order to set both motorD and motorE to a value of zero. while(SensorValue[Touch] == 0) { motor[motorE] = 0; motor[motorD] = 0; Launcher Programming Guide (ROBOTC ® ) TETRIX ® Getting Started Guide Extensions
Transcript of Launcher Programming Guide (ROBOTC - TETRIX … · Note: A comment is not part of the code that the...

235
Introduction:
Inthisguide,theRangerBotwillbeprogrammedtofollowalinewhilecarryingaball.Uponsensingabinwithitsultrasonicsensor,itwilllaunchtheballintothebin.ThisguideisforusewiththeROBOTC®programminglanguage.
Getting Started:
1.Tostarttheprogram,typethe Main Taskfunctionfollowedbyanopening brace.
taskmain()
{
2.Declarethreeinteger variables asseeninthecodebelow.Besideeachvariable,therearetwoslashes(//)followedbywhatthatvariableisrepresenting.Thesemarkacomment.NoticethatcommentsappeargreenwhencodeistypedintoROBOTC.
Note:AcommentisnotpartofthecodethattheNXTBrickwillexecute,butithelpstheprogrammerbyallowingtheadditionofnotestodescribewhathasbeendone.
intnValue; //lightsensorvalue
intmValue; //sonarsensorvalue
intPosition; //servoarmposition
3.TypetheWait functionandsetittowait 50 millisecondstoallowtherobottoinitializemotorsandsensors.
wait1Msec(50);
4.Typethe servo position commandtoinitializethepositionoftheservo.Thismustbesettoavaluebetween0and255,representingapositionbetween0°and180°,theservo’sfullrangeofmotion.
servo[servo1]=128;
5.AddaWhile Looptowaituntilthetouchsensorhasbeentouchedinorderfor motorDand motorE tostartmoving.Ifthetouchsensorhasbeenpressedthenthevalueofthetouchsensor,atthatmoment,wouldbe1;otherwise,thevalueofthetouchsensorwillbezero.Thus,theconditionfortheWhile LoopstatementwouldbetocheckifthetouchsensorvalueisequaltozeroinordertosetbothmotorDandmotorEtoavalueofzero.
while(SensorValue[Touch]==0)
{
motor[motorE]=0;
motor[motorD]=0;
Launcher Programming Guide (ROBOTC®)
TETRIX®GettingStartedGuideExtensions

236
Launcher Programming Guide (ROBOTC®)
6.Setthedefinedvariablestoavalueanddisplaythemtothescreen.
a.SetthenValuevariabletothevalueofthelightsensor,andthemValuevariabletothevalueoftheultrasonicsensor.
b.UsetheNXTwritetoscreencommandtoputthemonthescreen.
Thewritetoscreencommandrequiresthreepiecesofinformation,calledparameters,inordertowritebothtextandavariabletothescreen:
i.Thelinenumber.
ii.Thetext(inquotations)thatincludesadisplayvariablecaller.
Note:Inthiscase,%disthedisplayvariablecaller.Intheplaceof%d,anintegervariableisdisplayedonthe`screen.
iii.Thevariablename.
Thisinformationisinsidethebracketsbesidethecommand,separatedbycommas.
nValue=SensorValue[LightSensor];
nxtDisplayTextLine(0,"LightValue:%d",nValue);
mValue=SensorValue[SonarSensor];
nxtDisplayTextLine(2,"SonarValue:%d",mValue);
7.Belowthetextthatwasjustwrittentothescreen,displayamessagethatsays“START: Press Touch.”Becausenovariablewillbedisplayed,onlytwoparametersneedtobesenttothefunction,thelinenumberandthetext.
nxtDisplayCenteredTextLine(4,"START:PressTouch");
8.Typeaclosing bracetoendtheWhileLoopinstep5.
}
9.Addaninfinite While Looptomakethecontainingcodeexecuteforever.
while(true)
{
10.Initializeboththemotorsthataremovingthetires,whicharemotorAandmotorB,tobeequaltozerousingtheMotorfunction.
motor[motorA]=0;
motor[motorB]=0;
ExtensionsTETRIX®GettingStartedGuide
237
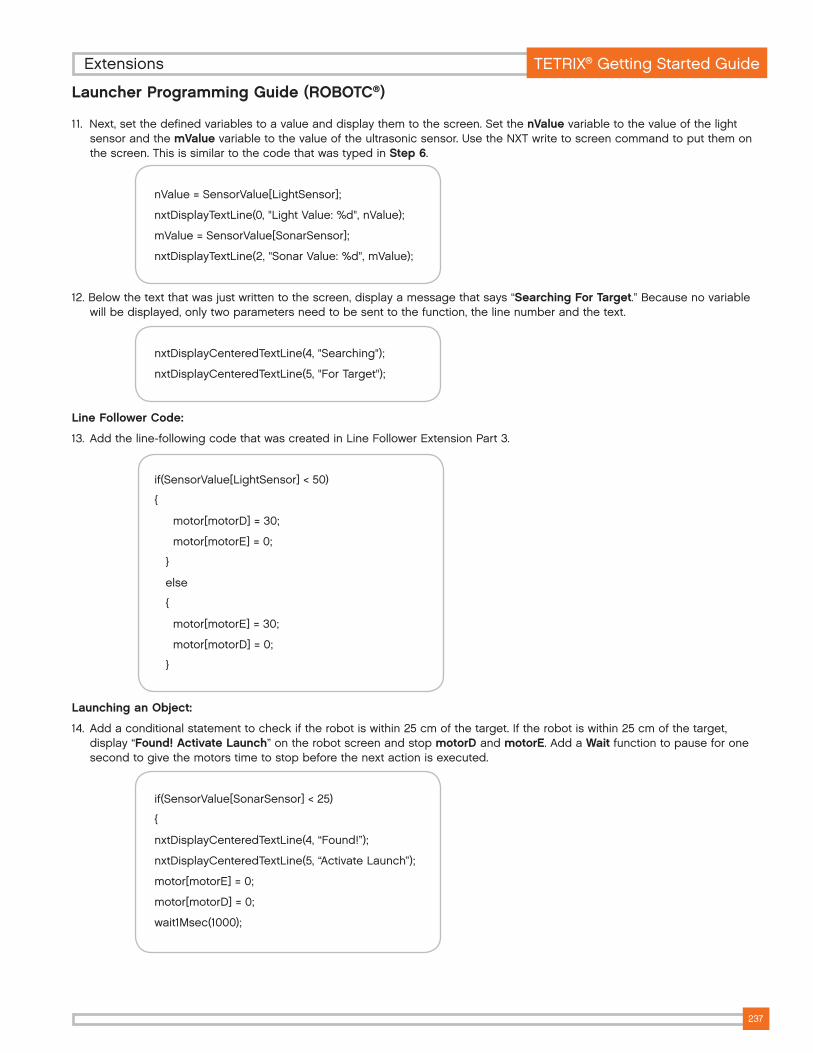
11.Next,setthedefinedvariablestoavalueanddisplaythemtothescreen.SetthenValuevariabletothevalueofthelightsensorandthemValuevariabletothevalueoftheultrasonicsensor.UsetheNXTwritetoscreencommandtoputthemonthescreen.ThisissimilartothecodethatwastypedinStep 6.
nValue=SensorValue[LightSensor];
nxtDisplayTextLine(0,"LightValue:%d",nValue);
mValue=SensorValue[SonarSensor];
nxtDisplayTextLine(2,"SonarValue:%d",mValue);
12.Belowthetextthatwasjustwrittentothescreen,displayamessagethatsays“Searching For Target.”Becausenovariablewillbedisplayed,onlytwoparametersneedtobesenttothefunction,thelinenumberandthetext.
nxtDisplayCenteredTextLine(4,"Searching");
nxtDisplayCenteredTextLine(5,"ForTarget");
Line Follower Code:
13. Addtheline-followingcodethatwascreatedinLineFollowerExtensionPart3.
if(SensorValue[LightSensor]<50)
{
motor[motorD]=30;
motor[motorE]=0;
}
else
{
motor[motorE]=30;
motor[motorD]=0;
}
Launching an Object:
14. Addaconditionalstatementtocheckiftherobotiswithin25cmofthetarget.Iftherobotiswithin25cmofthetarget,display“Found! Activate Launch”ontherobotscreenandstopmotorD andmotorE.AddaWaitfunctiontopauseforonesecondtogivethemotorstimetostopbeforethenextactionisexecuted.
if(SensorValue[SonarSensor]<25)
{
nxtDisplayCenteredTextLine(4,“Found!”);
nxtDisplayCenteredTextLine(5,“ActivateLaunch”);
motor[motorE]=0;
motor[motorD]=0;
wait1Msec(1000);
Launcher Programming Guide (ROBOTC®)
TETRIX®GettingStartedGuideExtensions

238
15.Spinboththetireson motorA andmotorB usingtheMotorfunction,andthenpausetheprogramforthreeseconds.Setthemotorpower,forbothmotors,tobeequalto100.
motor[motorA]=100;
motor[motorB]=100;
wait1Msec(3000);
16.AddaFor Loopthatmakesthearmservomovefromitscurrentpositionat128toalowerpositionof170,waiting10millisecondsbetweeneachmovement.
for(Position=128;Position<170;Position++)
{
servo[servo1]=Position;
wait10Msec(1);
}
wait1Msec(1000);
17.AddaFor Loopthatmakesthearmservomovefromitscurrentpositionat170toahigherpositionof128,waiting10millisecondsbetweeneachmovement.
for(Position=170;Position>128;Position--)
{
servo[servo1]=Position;
wait10Msec(1);
}
18.Next,stopboththemotorsthataremovingthetires,whicharemotorAandmotorB,usingtheMotorfunction.
motor[motorA]=0;
motor[motorB]=0;
19.Next,addaWhile Looptohavetherobotwaituntilthetargethasbeenmoved25cmormorefromtherobot.Thus,theconditionfortheWhileLoopstatementwouldbetocheckifthesonarsensorvalueislessthan25inordertosetbothmotorD and motorEtoavalueof0.
while(SensorValue[SonarSensor]<25)
{
motor[motorE]=0;
motor[motorD]=0;
Launcher Programming Guide (ROBOTC®)
ExtensionsTETRIX®GettingStartedGuide

239
20.Next,displaythevalueofthelightsensorandthesonarsensorontheNXTscreen.Tosavetime,copyandpastethecodefromStep6.
nValue=SensorValue[LightSensor];
nxtDisplayTextLine(0,"LightValue:%d",nValue);
mValue=SensorValue[SonarSensor];
nxtDisplayTextLine(2,"SonarValue:%d",mValue);
21.Belowthetextthatwasjustwrittentothescreen,displayamessagethatsays“To Continue: Move Target.”Becausenovariablewillbedisplayed,onlytwoparametersneedtobesenttothefunction,thelinenumberandthetext.
nxtDisplayCenteredTextLine(4,"ToContinue:");
nxtDisplayCenteredTextLine(5,"MoveTarget");
End the program:
22.Typeaclosing bracetoendtheWhileLoopinStep19.
}
23.Typeaclosing bracetoendtheconditionalstatementinStep14.
}
24.Typeaclosing bracetoendtheinfiniteWhileLoopfromStep9.
}
25.Typeaclosing bracetoendtheprogram.
}
Completed Code:
taskmain()
{
intnValue;//lightsensorvalue
intmValue;//sonarsensorvalue
intPosition;//servoarmposition
wait1Msec(50);//Theprogramwaits50millisecondstoinitializethelightsensor.
servo[servo1]=128;//Initialservoposition
Launcher Programming Guide (ROBOTC®)
TETRIX®GettingStartedGuideExtensions

240
Completed Code (continued):
//// Wait for touch sensor to be pressed to start.
while (SensorValue[Touch] == 0)
{
motor[motorE] = 0; // Motor B is off.
motor[motorD] = 0; // Motor C is off.
nValue = SensorValue[LightSensor];
nxtDisplayTextLine(0, "Light Value: %d", nValue); // update display
mValue = SensorValue[SonarSensor];
nxtDisplayTextLine(2, "Sonar Value: %d", mValue); // update display
nxtDisplayTextLine(4, "START:Press Touch");
}
while(true) // Infinite loop
{
motor[motorA] = 0; // left tire off
motor[motorB] = 0; // right tire off
nValue = SensorValue[LightSensor];
nxtDisplayTextLine(0, "Light Value: %d", nValue);
mValue = SensorValue[SonarSensor];
nxtDisplayTextLine(2, "Sonar Value: %d", mValue);
nxtDisplayCenteredTextLine(4, "Searching");
nxtDisplayCenteredTextLine(5, "For Target");
//// Line following Here;
if(SensorValue[LightSensor] < 50) // If the light sensor reads a value less than 50:
{
motor[motorD] = 30; // Motor D is run at a 30 power level.
motor[motorE] = 0; // Motor E is run at a 0 power level.
}
else // If the light sensor reads a value greater than or equal to 50:
{
motor[motorE] = 30; // Motor E is run at a 30 power level.
motor[motorD] = 0; // Motor D is run at a 0 power level.
}
Launcher Programming Guide (ROBOTC®)
ExtensionsTETRIX® Getting Started Guide

241
Completed Code (continued):
Launcher Programming Guide (ROBOTC®)
//// Sonar ranging here; Stop at target distance, start launcher and lower launch arm
if(SensorValue[SonarSensor] < 25) // Target sensed at 25cm, launch balls.
{
nxtDisplayCenteredTextLine(4, "Found!"); // update display
nxtDisplayCenteredTextLine(5, "Activate Launch"); // update display
motor[motorE] = 0; // Motor E is off
motor[motorD] = 0; // Motor D is off
wait1Msec(1000); // Pause for 1 second
motor[motorA] = 100; // Spin left tire
motor[motorB] = 100; // Spin right tire
wait1Msec(3000); // Pause for 3 seconds
for (Position = 128; Position < 170; Position++)
{
servo[servo1] = Position; // lower dispenser arm
wait10Msec(1);
}
wait1Msec(1000); // Pause for 1 second.
for (Position = 170; Position > 128; Position--)
{
servo[servo1] = Position; // raise dispenser arm
wait10Msec(1);
}
motor[motorA] = 0; // off left tire
motor[motorB] = 0; // off right tire
while(SensorValue[SonarSensor] < 25) // loop here waiting for target to be moved
{
motor[motorE] = 0; // Motor B is off
motor[motorD] = 0; // Motor C is off
nValue = SensorValue[LightSensor];
nxtDisplayTextLine(0, "Light Value: %d", nValue); // update display
mValue = SensorValue[SonarSensor];
nxtDisplayTextLine(2, "Sonar Value: %d", mValue); // update display
nxtDisplayCenteredTextLine(4, "To Continue:"); // update display
nxtDisplayCenteredTextLine(5, "Move Target"); // update display
}
}
}
}
TETRIX® Getting Started GuideExtensions


















